
Abstract
This paper focuses on the cooperative control of multiple robots with unknown control directions. The commonly used Nussbaum-gain approach may result in large overshoot and oscillations. Therefore, we propose a new switching adaptive control method to solve the leaderless and leader-following consensus problem for multiple robots. The proposed switching strategy can make the controller quickly adapt to the unknown control directions, resulting in a better transient control performance. Moreover, the presented controller can steer multiple robots to a common value in finite time regardless of the heterogeneous unknown control directions and fully unknown nonlinearities in the robot dynamic models. This implies that the controller can achieve fast convergence rate and have strong robustness. In order to make the controller distributed, new local supervisory functions are constructed to design the logic-based switching rule. These supervisory functions are local, meaning that they are only dependent on local state information. No neigborhood/global information are needed. Simulations and experiments verify the obtained results.
Introduction
Lately, cooperative control of multiple robots have attracted an increasing attention.1–4 They have broad applications in various kinds of fields, such as library, manufacturing, mining, etc. For examples, in library, multiple robots can be programmed to locate and retrieve specific books from shelves, saving time for librarians and patrons. They can also help with shelf maintenance, ensuring that books are arranged correctly and in their designated locations. Cooperative control can be roughly classified into leaderless5,6 and leader-following7–9 consensus control. Leaderless consensus control means that multiple robots will reach a common value cooperatively, while leader-following control indicates that the followers will track a reference signal generated by the leader robot. Lots of excellent works and advanced control strategies, such as model predictive control,10,11 adaptive control, 12 iterative learning control, 13 have been presented for the leaderless/leader-following consensus of multiple robots.
Finite-time cooperative control means that multiple robots can reach consensus in finite time.14–16 Compared with traditional asymptotic cooperative control, finite-time control indicates a fast convergence speed and strong robust to external uncertainties/nonlinearities. 17 Moreover, finite-time convergence also means that the cooperative control can be decoupled from other tasks such as state estimation, fault detection etc. Lots of good works have been taken on finite-time cooperative control. The control methods can be divided into three classes: sliding mode control, adding a power integrator technique, and time-varying feedback.
For sliding mode control, the states of the multiple robots will first reach a sliding mode surface in finite time, and then the states will reach the equilibrium points.18,19 For examples, Yao et al. 19 proposed a fully distributed controller for disturbed multi-agent systems. Event-based communication was also considered. However, the sliding mode control may cause chattering problem in practical.
For adding a power integrator technique, the idea is to construct a special Lyapunov function and utilize the concept of homogeneous polynomial to construct the controller.20,21 Li et al. 20 investigated the finite-time output consensus for mult-agent systems with mismatched disturbance. Compared with sliding mode control, the adding a power integrator technique does not introduce sign function and can avoid the chattering problem. Yet, it may have weaker disturbance rejection ability than the sliding mode control.
Time-varying feedback is recent new method to achieve finite time control. The controller often contains a well-constructed time-varying function.22,23 Based on the properties of this time-varying function, the finite-time control purpose of multiple robots can be achieved. Song et al. 23 presented an extensive literature review for the finite time control. The advantages of the time-varying feedback is that it can prescribe the convergence time and transient performance. However, if it needs to regulate the tracking error toward exact zero, the time-varying gain may become infinite, which makes the control system unstable.
Unknown control directions is a common phenomenon in multiple robot systems.24,25 It may be caused by the failure of the actuators or input nonlinearities. Since the control direction is unknown, the standard negative feedback control methods fail. A common method is the utilization of Nussbaum gain.26,27 The Nussbaum gain contains sine/cosine functions that can adapt to the unknown control directions. For examples, Liang et al. 28 proposed a fractional-order Nussbaum gain method to deal with heterogeneous unknown control directions in complex mechatronic systems. However, a common drawback of the the Nussbaum gain is that it often causes larger control effort and oscillations. Meanwhile, the selections of the Nussbaum gain is also a difficult task in practical engineering.
Therefore, the logic-based switching control method has been proposed29–31 to deal with unknown control direction. Based on a supervisory function, the controller can automatically switch the sign of the control gain to adapt to the unknown control directions. The logic-based switching rule has also been used to achieve finite time control for a class of nonlinear systems. 31 It is also shown that by the switching adaptive control method, the control performance can be improved compared with Nussbaum gain method. However, the above logic-based switching control methods are only for a single system/agent. To the best of our knowledge, there is no works about the logic-based switching finite-time control for multiple robots with unknown control directions. The main difficulties lie on that it is not easy to construct the supervisory functions for multiple robots because the supervisory functions need to be distributed and cannot rely on global information.
According to the above literature review, this paper will take a study on the logic-based switching finite-time cooperative control of multiple robots with unknown control directions. The main contributions are:
First, new switching adaptive control methods are presented to solve the finite-time leaderless and leader-following consensus problem for multiple robots. Compared with the existing methods,14,17,18 the proposed controller can steer multiple robots to a common value in finite time regardless of the heterogeneous unknown control directions and fully unknown nonlinearities in the robot dynamic models;
Second, new local supervisory functions are constructed for multiple robots. Based on these supervisory functions, logic-based switching rules can be constructed to handle the heterogeneous unknown control directions. Moreover, these supervisory functions are local, meaning that they are only dependent on local state information. No neigborhood/global information are needed. This feature will bring convenience for the implementation of the proposed controller;
Third, different from the traditional Nussbaum gain methods,26,27 the proposed control method adopts the logic-based switching rule to adaptively tune the control directions. This switching strategy will make the controller quickly adapt to the unknown control directions, resulting in a better transient control performance.
The organization of the paper is as follows. Section II presents the finite-time cooperative control problem to be solved. Sections III and IV investigate the leaderless and leader-following finite-time consensus problem separately. Section V gives two application examples. These examples demonstrate the situation where multiple robots running in a library environment to help people arrange books. Section VI concludes the paper.
Problem formulation and preliminaries
Problem formulation
Consider a group of robots given by:


where

where
The output of the leader is denoted by a time-varying function
The aim of this paper is to solve the following control problem: Finite-time cooperative control problem.
1) (Leaderless finite-time consensus problem). Design a distributed controller
2) (Leader-following practical finite-time consensus problem). Design a distributed controller
Preliminaries
The following are important lemmas that will be used in the controller design and stability analysis.

where



where


for
Leaderless finite-time consensus
This section will focus on the study of leaderless fixed-time consensus problem. Similar to
15
, we make the following assumption.
Main results
The controller is inspired by the backstepping technique. Consider the following change of coordinates


where
Controller structure
The virtual control effort

where

where
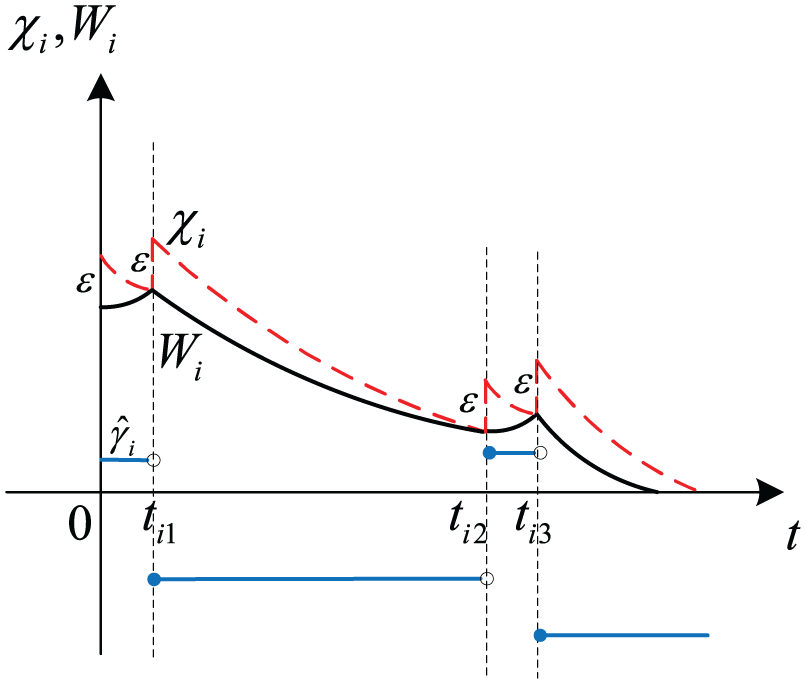
Logic-based switching rule
As shown in Figure 1,

where
Switching mechanism.
The Lyapunov function

with
where
Based on the above controller, the main result is as follows:
The proof will be presented in the next subsection.
Proof of the main results
The proof is seperated into two parts.
Part I: Prove all signals in the multi-agent systems are bounded.
We will first show that for

By contradiction, we can find a time instant
Consider following Lyapunov function

where


and
The derivative of
Substituting (11) into (19) and using Lemmas 1-2, we have
where
By the property of Laplacian matrix, we have

where
We know that
Then, differentiating

For the term
where
By the result in Step 1), we know that
where
On the other side, we have
where
It follows that
where
Substituting (12) into (22) and using (23), we obtain
where
We first show
where
Comparing (25) with (15), and noting that at time instant
According to the above analysis, we known there is a time interval
where
Finally, by repeating the above procedures and using (16), we can show all the signals are bounded. It completes the first part of the proof.
Part II: The multiple robots system is finite-time stable.
Based on the above analysis, we know that
From (15), we have
where
Using (20), it follows that
Therefore, when

where
Leader-following finite-time consensus
This section will investigate the leader-folllowing finite-time consensus problem.
Main results
Consider the following change of coordinates


where
Controller structure
The virtual control effort


where

As shown in Figure,
1)
2)
Logic-based switching rule

where
The Lyapunov function

where

where
Based on the above controller, the main result is as follows:
The proof will be presented in the next subsection.
Proof of Theorem 5
We will show that for


for
From (30), we have

where


where

where
Consider following Lyapunov function

where
Using (36)-(37), the derivative of

where
Using (27), we have
where
Substituting (28) into (38), we obtain

where

where
Consider the Lyapuonv function described by (32). We have:

For
where
Noting that
where
For
where
Substituting (29) into (39) and using (40), we get
where
We first show

where
Comparing (33) with (42), and noting that at time instant
According to the above analysis, we can conclude that there exists a time interval

This shows
Finally, by repeating the above procedures and using (35), we can show all the signals in the multi-agent systems are bounded. Meanwhile,
Simulations
In this section, we will present two examples to demonstrate the effectiveness of the proposed method.
Example 1
Suppose four mobile robots running in a library. They need to retrieve books from four shelves to a common location. The communication graph of the four robots is depicted in Figure 2 without considering the leader 0. We use the proposed method in Section 3 to design the controller for these robots. The robot models are given by:


where
Communication graph.
By the proposed method, the state trajectories of the four robots are shown in Figure 3. It can be seen that all the positions and velocities of the robots have reached a common value in finite time. Meanwhile, from Figure 4, we can see that four robots have moved from four different initial points to a common location. Figure 5 shows the variations of the adaptive gain
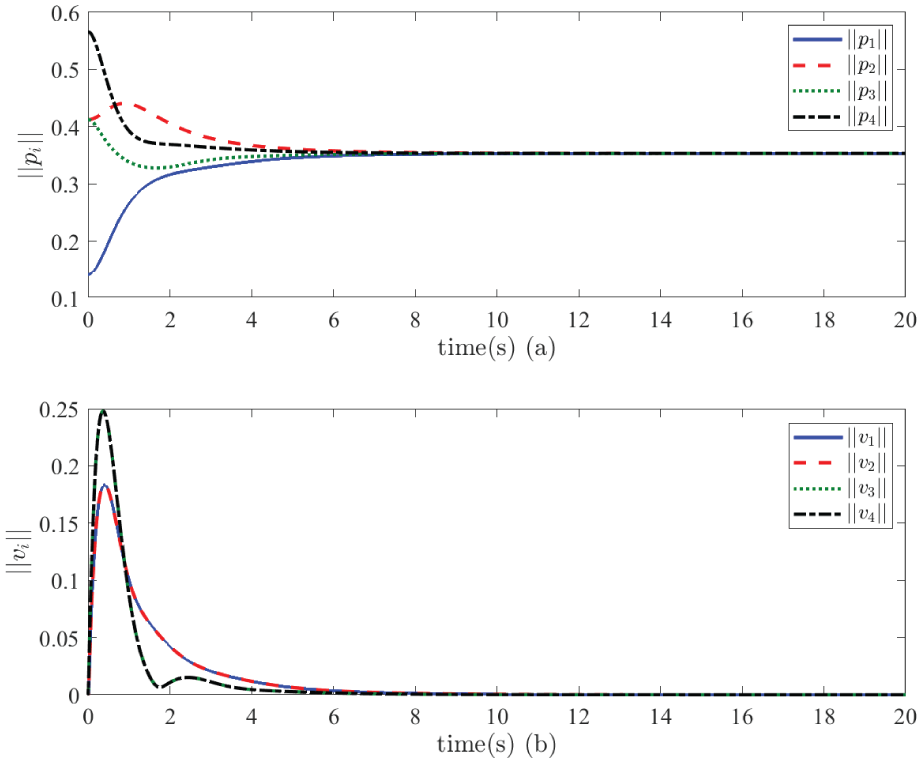
Control performance for four robots.
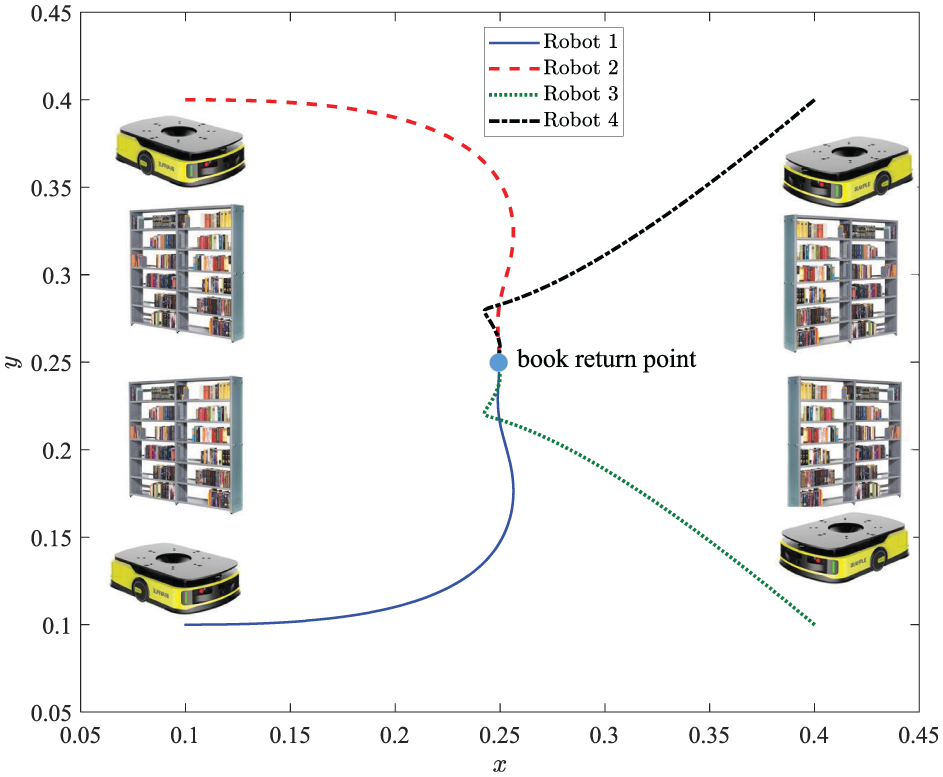
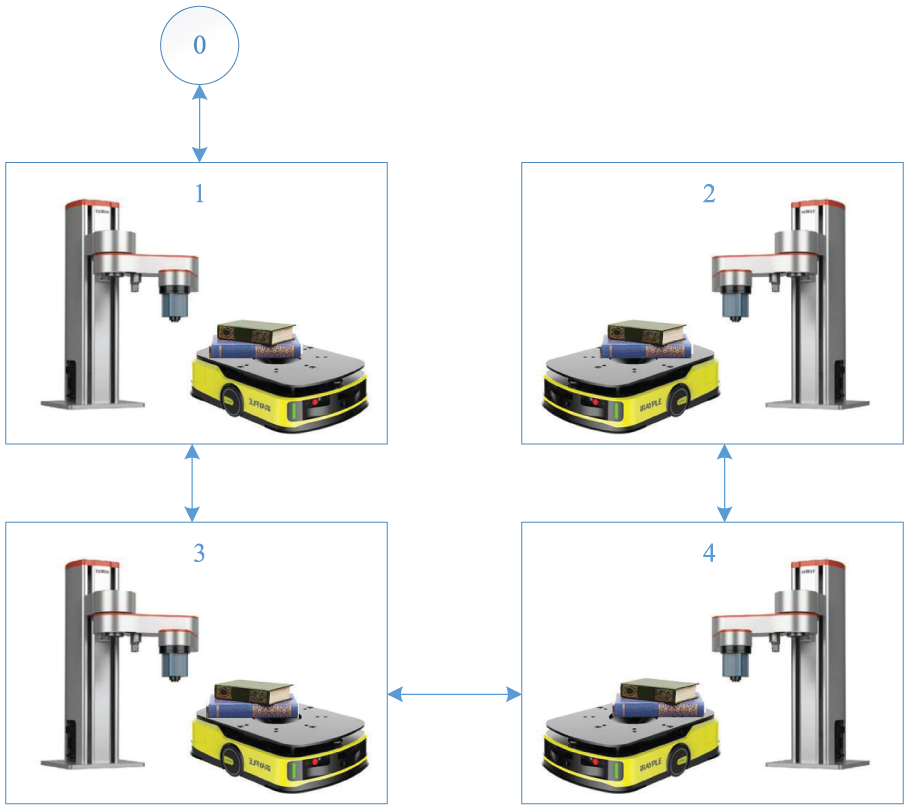
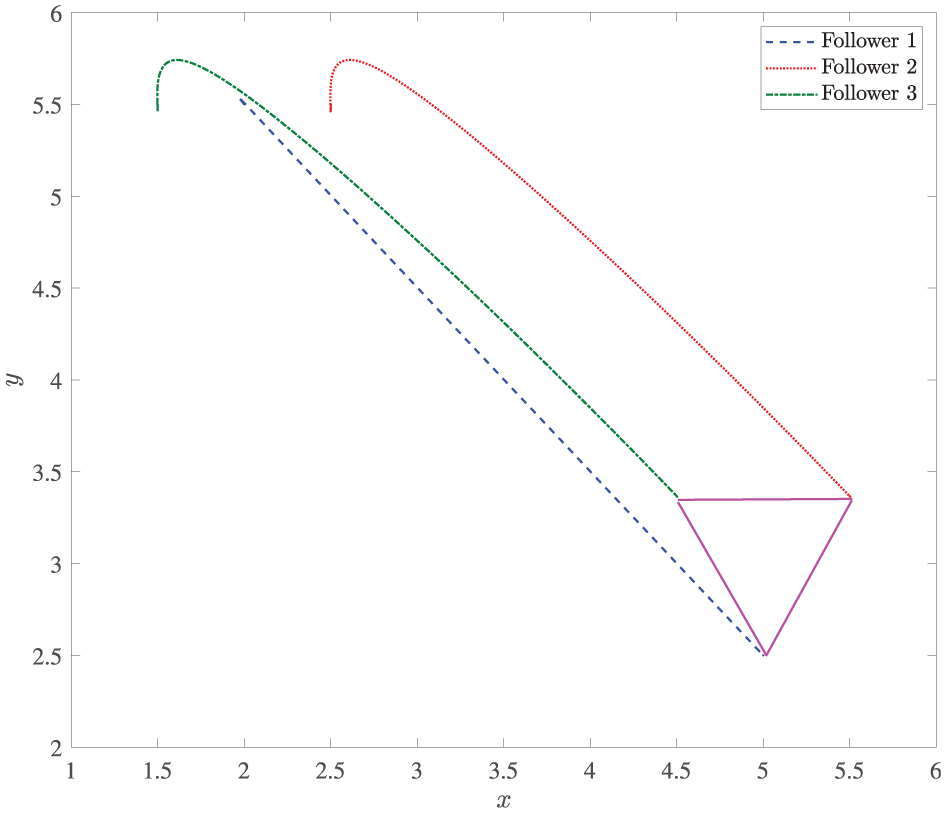
State trajectories of four robots. These robots retrieve books from four shelves to a common book return location.
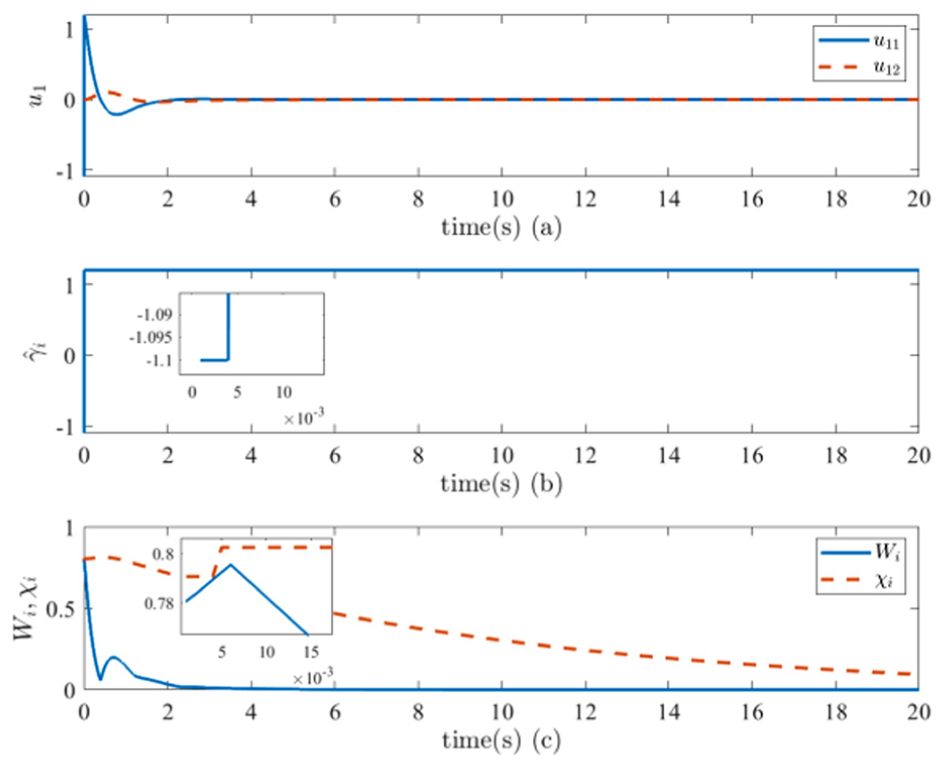
Control efforts and variations of adaptive parameters.
To have a comparison, we consider the Nussbaum gain method. According to Liang et al., 8 the controller can be designed as:



where

Meanwhile, we consider the following five cases:
Case I:
Case II:
Case III:
Case IV:
Case V:
Figures 6 and 7 demonstrate the performance of the robots for the above five cases. We can see that the proposed logic-based controller is robust to the variations of
Next, we take the following simple Nussbaum controller as an example to further explain this.

where
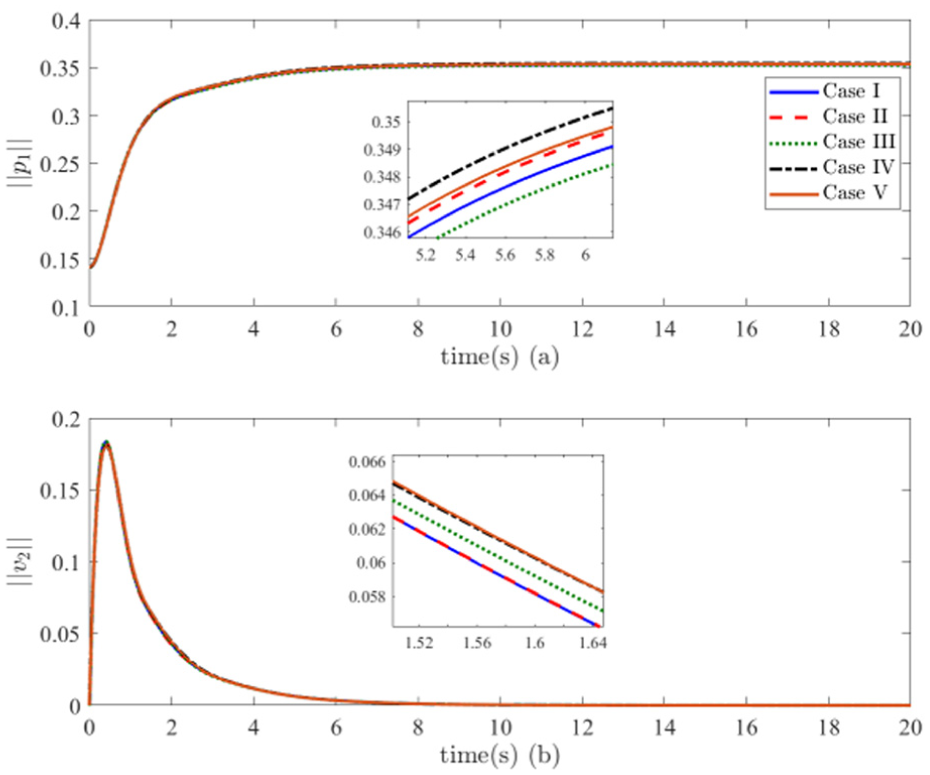
Control performance of four mobile robots for Cases I–V under the proposed method.
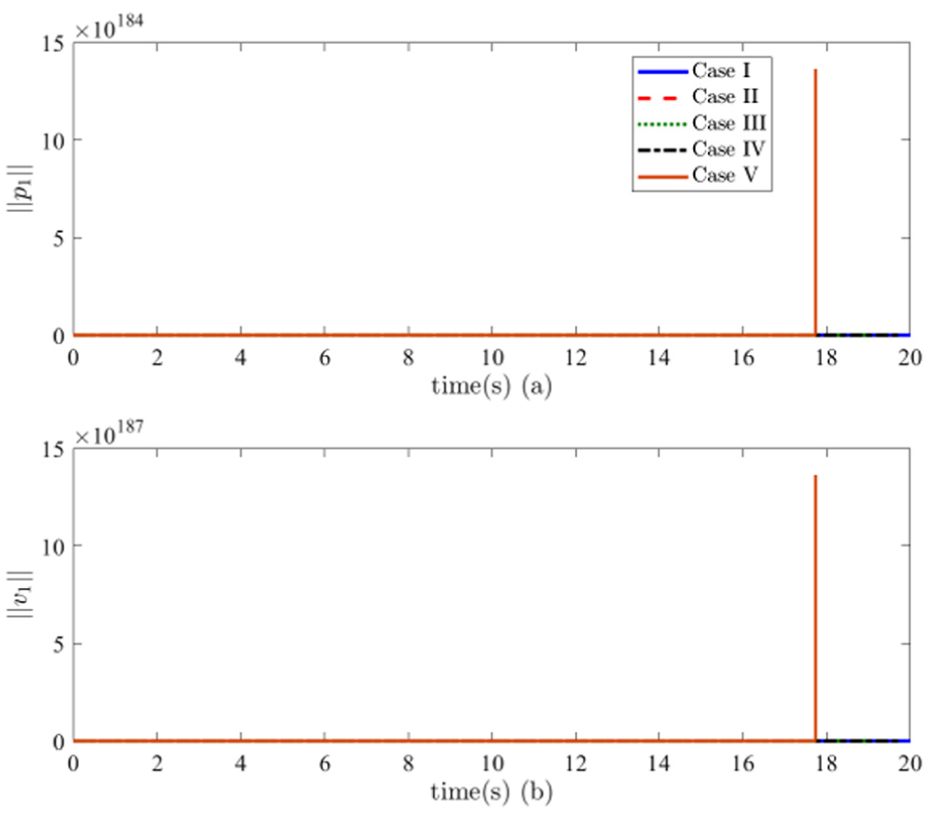
Control performance of four mobile robots for Cases I-V under the Nussbaum gain method.
For the logic-based switching controller, the control direction is detected according to the supervisory function, which is selected as
However, for Nussbaum gain, since
In addition, the polynomial or exponential increasing terms
Example 2
In this example, we consider the control of four robot manipulators. These robot manipulators need to move the books from the shelves to the mobile robots, then the mobile robots will transport these books to the return point. The communication graph of the robots is also shown in Figure 2 with a virtual leader. The method presented in Section 4 is utilized to design the controller for these robots. The models are given by:

where

and
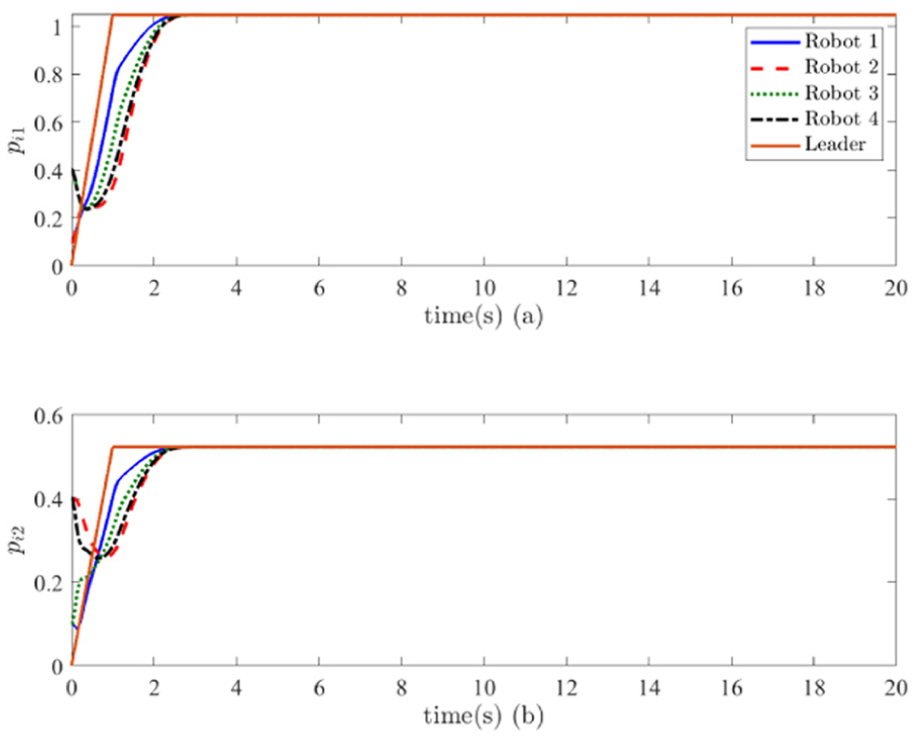
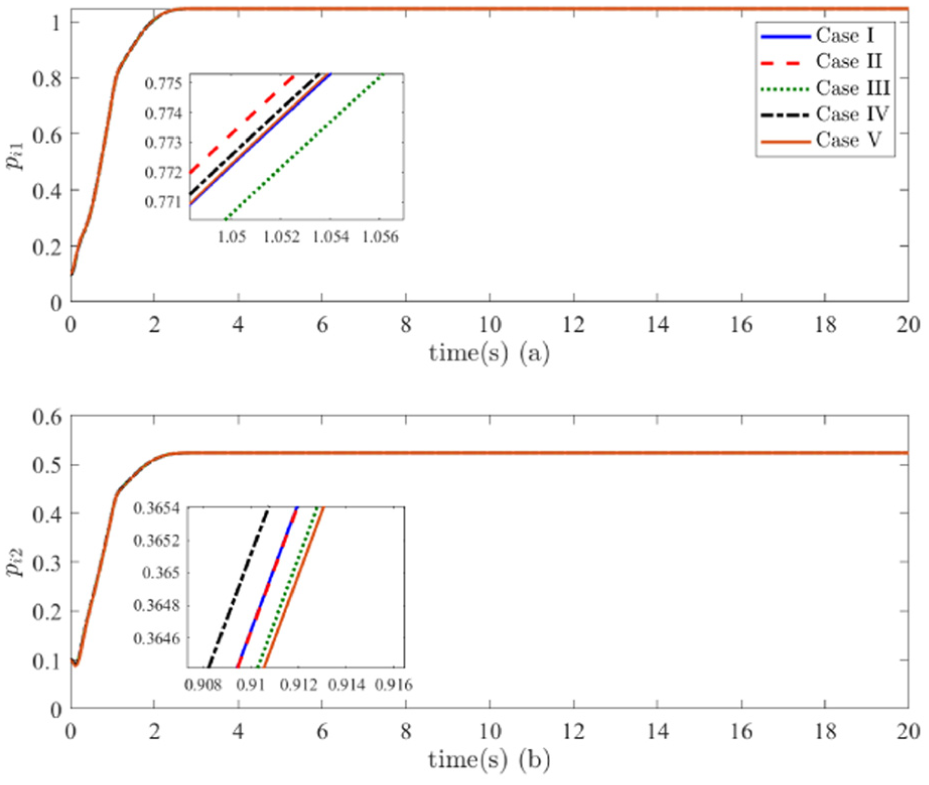
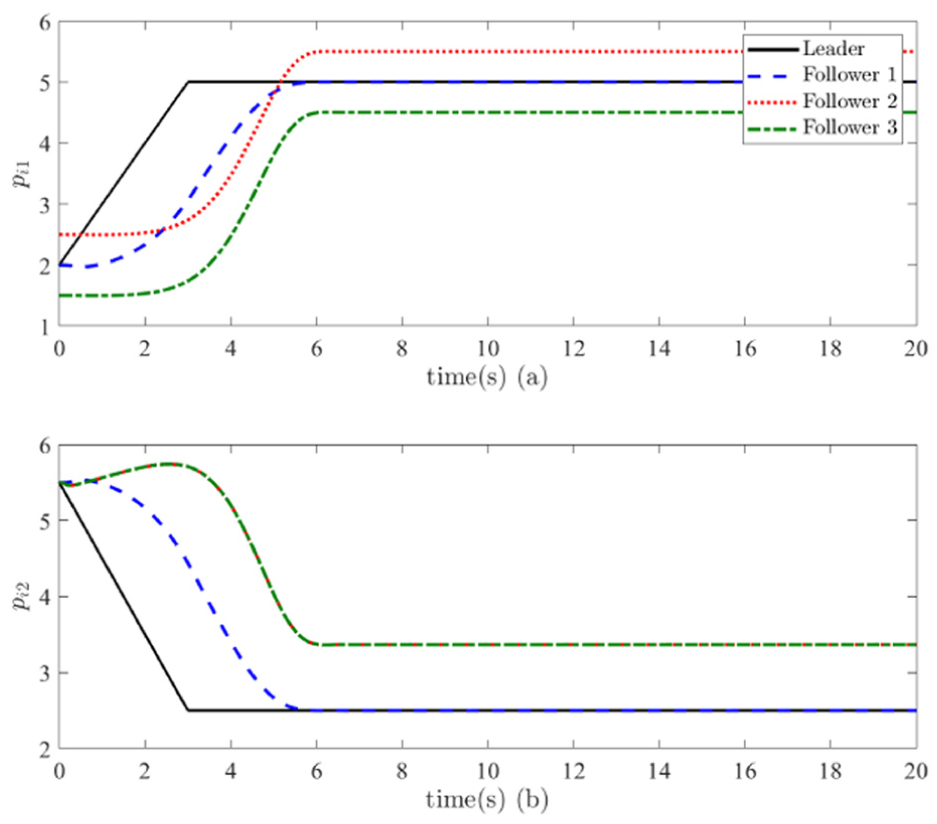
Similar to Example 1, by the proposed method, the control performance of the four robots are shown in Figures 8 and 9. It can be seen that all the positions of the robot manipulators follow the leader signal
Control performance for four robot manipulators in Case I.
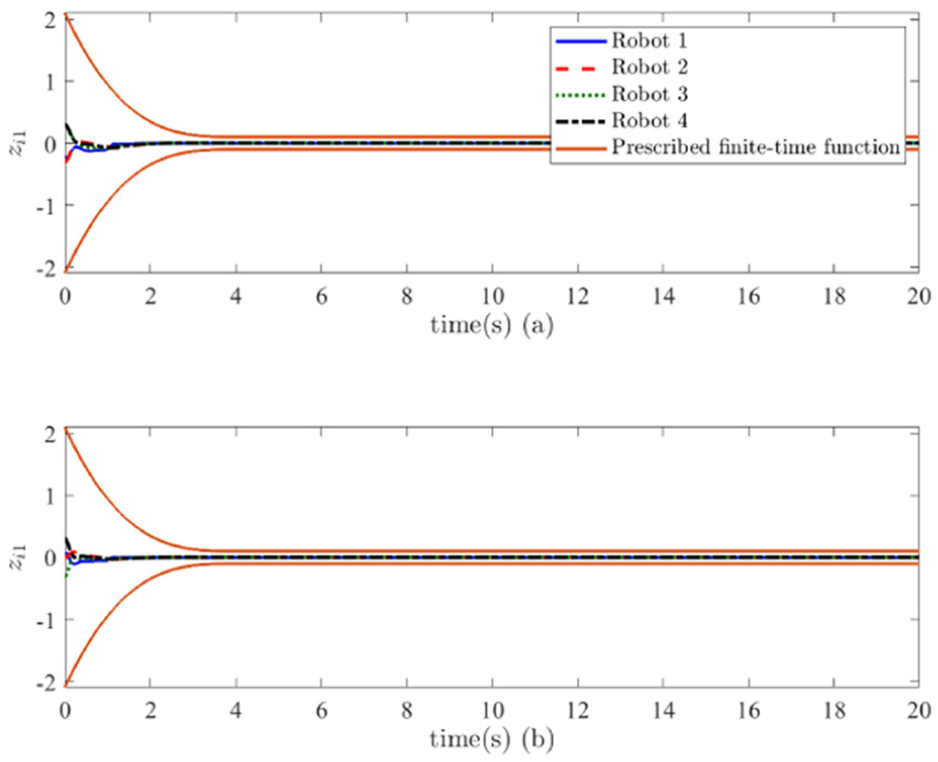
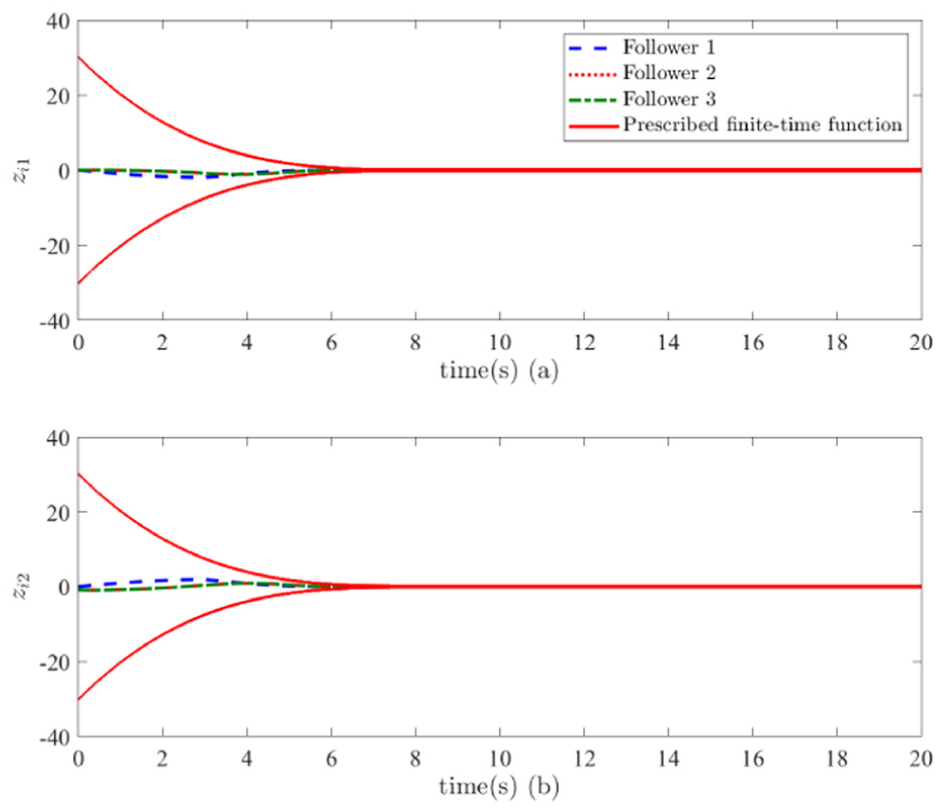
Tracking error and prescribed finite-time function.
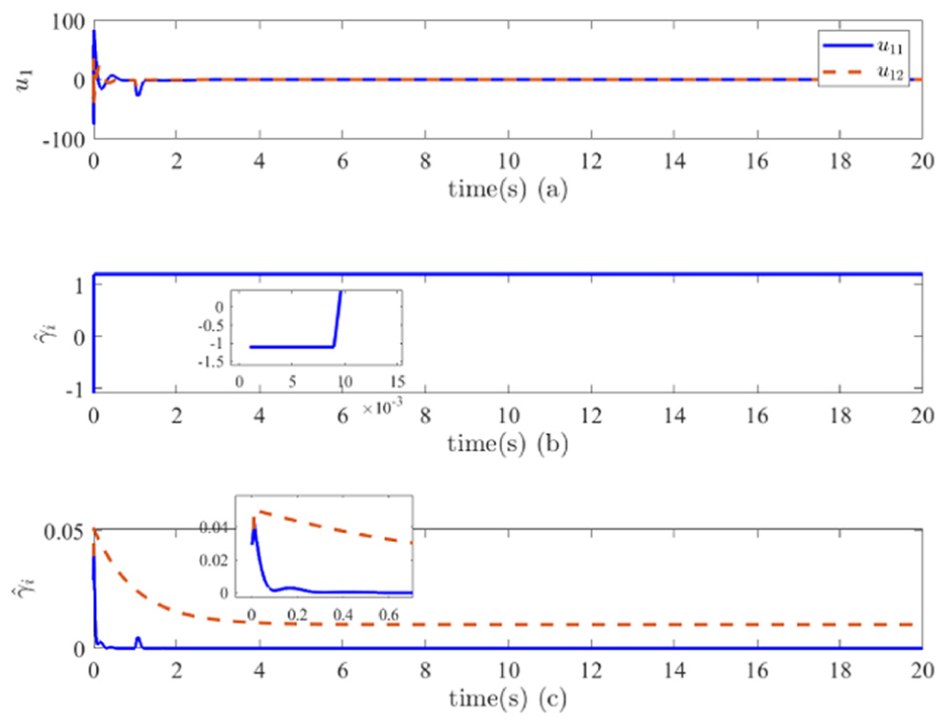
Control efforts and variations of adaptive parameters.
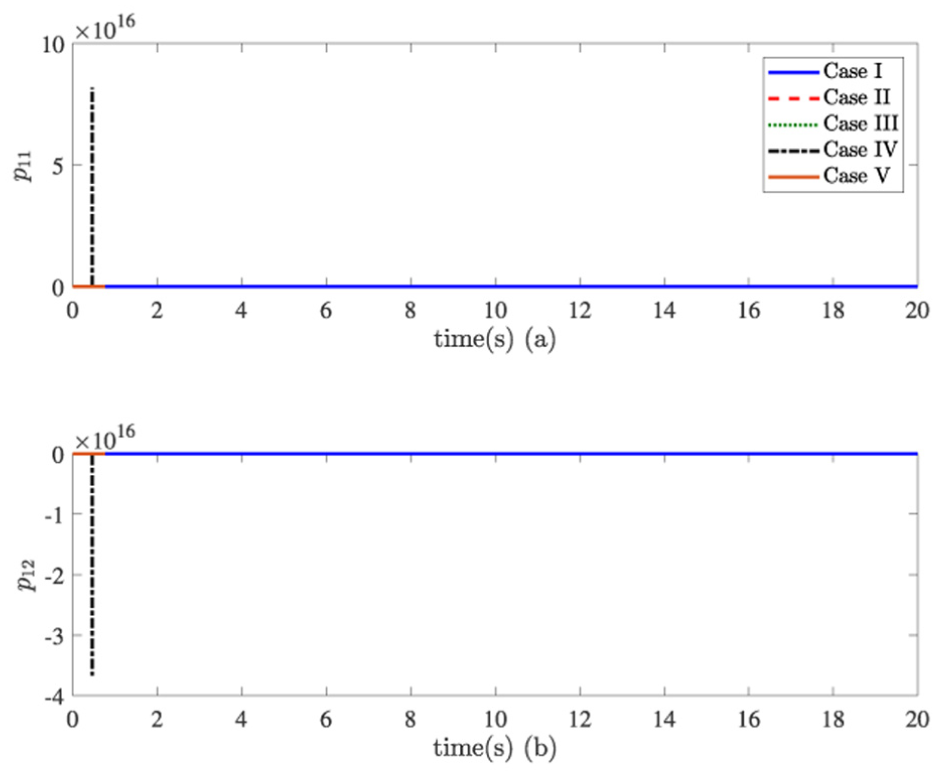
For comparison, we also consider the Nussbaum gain method. The controller is given by (45)-(47), and the same five cases are considered. Figure 11 illustrates the performance of the robots. Still in all five cases, the robots can reach a steady state by the proposed method, while robots using the Nussbaum gain method are unstable as shown in Figure 12. These verify the advantages of the proposed controller.
Control performance of four robot manipulators for Cases I-V under the proposed method.
Control performance of four robot manipulators for Cases I-V under the Nussbaum method.
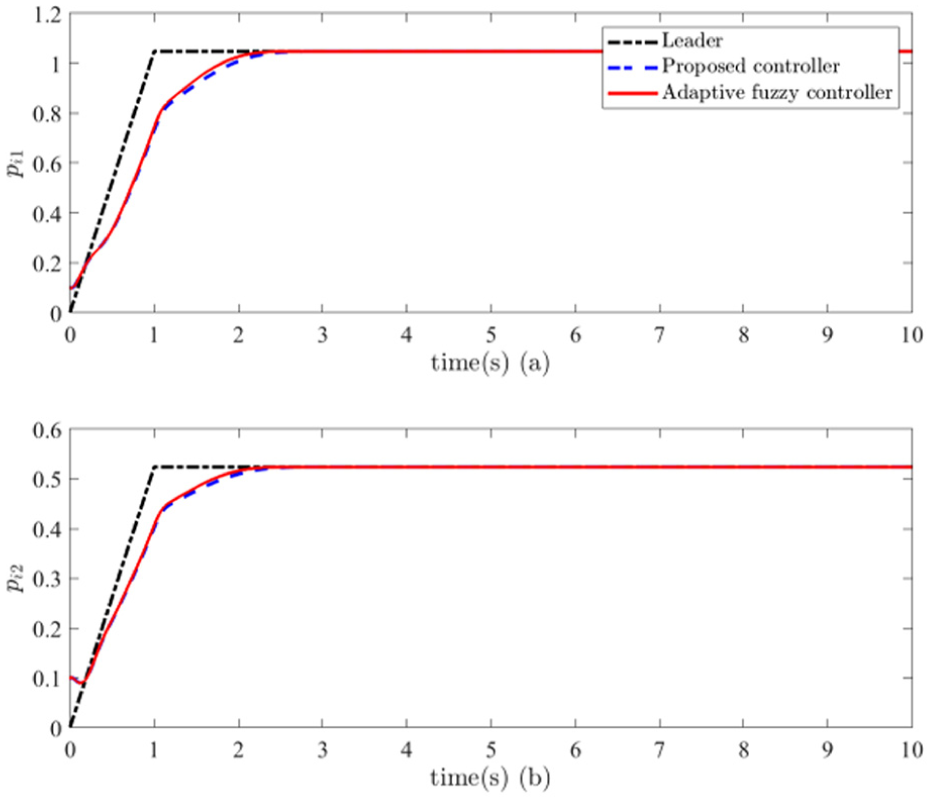
In order to further verify the effectiveness of the proposed method, we consider a class of adaptive fuzzy control method. 33 It is expressed as:


where


with


The control performance is shown in Figure 13. We can see that the performance of the above adaptive fuzzy controller is a little better than the proposed controller due to the approximation ability of the fuzzy logic. Meanwhile, we can see that for both controllers, the tracking error is constrained in the prescribed tube. However, the adaptive fuzzy controller has a much more complex structure than the proposed controller.
Tracking performance comparison with adaptive fuzzy controller.
Discussion
Finite-time cooperative control means that multiple robots can reach consensus in finite time. That is finite time control guarantees that system states converge to equilibrium within a pre-defined finite time, whereas asymptotic control only ensures convergence as time approaches infinity. This indicates a fast convergence speed, reduced cumulative tracking error, and strong robustness to external uncertainties/nonlinearities. Moreover, finite-time convergence also means that the cooperative control can be decoupled from other tasks such as state estimation, fault detection, etc.
It is noted that theoretically the states or tracking error will converge to zero in finite time if all the design parameters are positive. This is due to the adaptive feature of our proposed method. The theoretical results imply that the parameters selection can be very flexible and straightforward. This can be also seen from the design procedures and the proofs of the main results where Young’s inequalities are extensively used. In fact, from the simulations, we can see that many of the design parameters are the same. It is also noted that appropriate design parameters can result in smaller settling time and better transient performance. Next, we present some guidelines for the parameters selections.
Basically, larger control gain
Moreover, for the leader-following finite-time consensus, one can prescribe a convergence time or transient performance for the closed loop systems. In fact, from Theorem 8, we know the output satisfies
We will use some examples to show the above facts. Consider the following five cases:
Case A:
Case B:
Case C:
Case D:
Case E:
For Case A, Case B and Case C, the control gains are increasing. The performance are shown in Figures 14 and 15. We can see from Figure 14 that the convergence rate becomes faster when the control gains are larger. Meanwhile, the control effort becomes bigger for larger control gains as demonstrated in Figure 15.
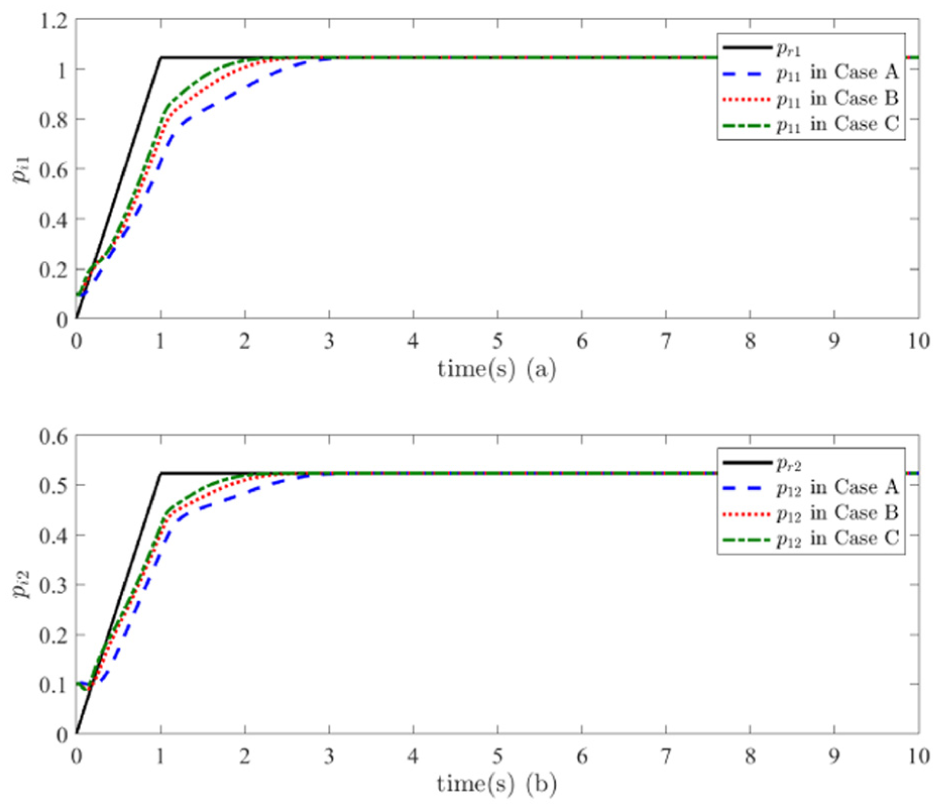
Control performance comparison in Cases A, B and C.
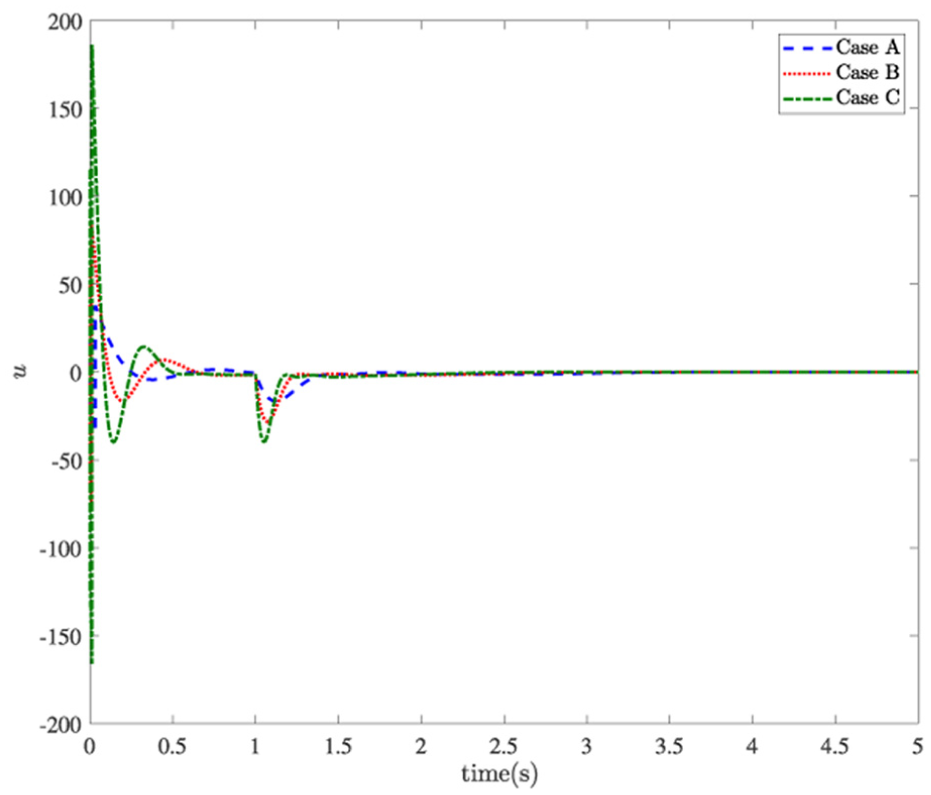
Control efforts comparison in Cases A, B and C.
For Case D, Case B and Case E, the prescribed finite time T becomes larger. As shown in Figure 16, we can see that for a smaller T, it means a faster convergence rate and a smaller transient time. We can see from Figure 17, when we increase the value of T, the control effort becomes smaller.
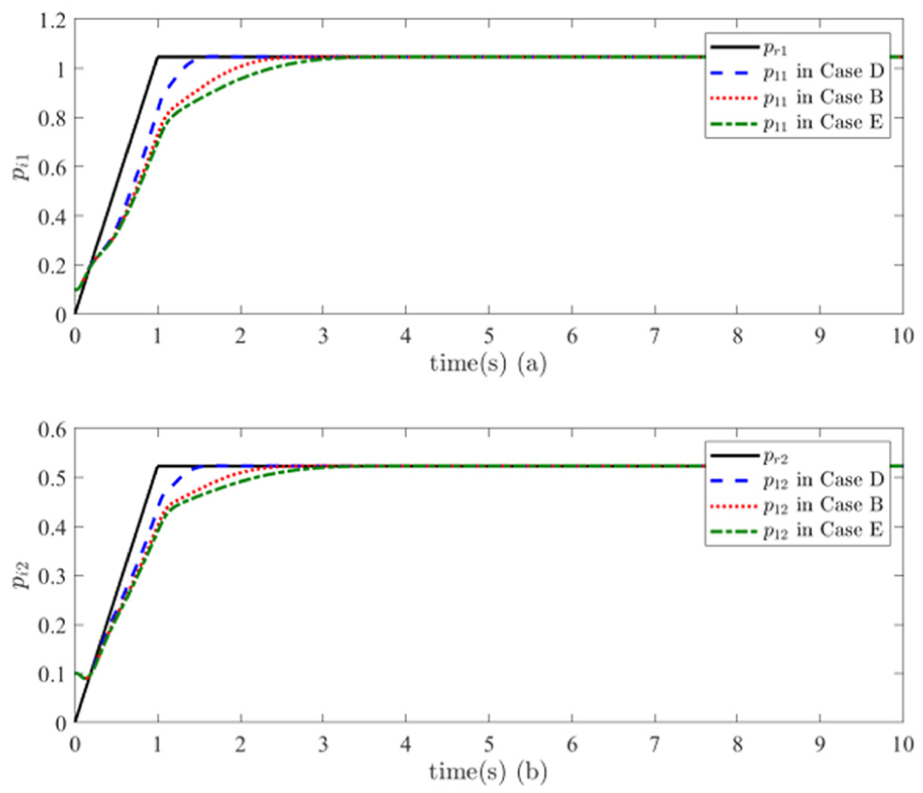
Control performance comparison in Cases D, B and E.
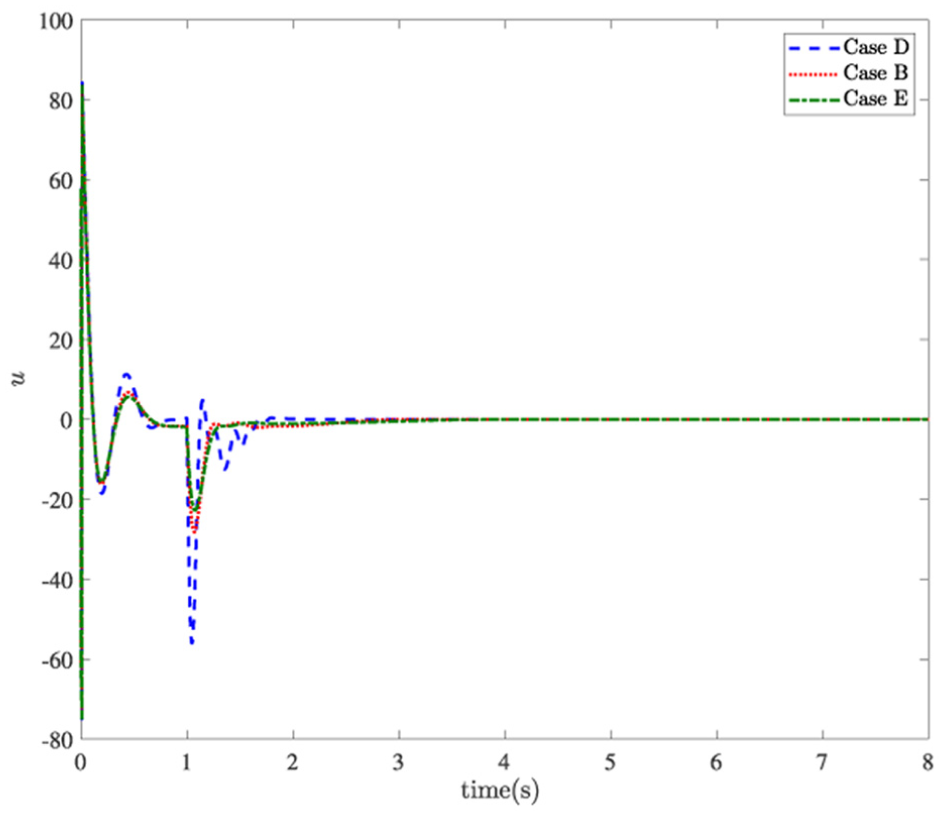
Control efforts comparison in Cases D, B and E.
Experiments
In this section, we will conduct an experiment to further verify the proposed method. The experimental platform is shown in Figure 18. The mobile robot has four Mecanum wheels driven by servo motors. Hence, it can move in four directions. A motion control board consisting of STM32F103 and Raspberry Pi 3B is used to receive/send data to the servo motors. The motion control board can transform PWM commands from the Raspberry Pi to motor voltage for speed regulation. An IMU is integrated into the control board to detect the pose of the robot. Therefore, closed-loop control for the mobile robot can be realized. Ubuntu 18.04, ROS (Robot Operating System) and MATLAB/Simulink are utilized in the host computer to control the mobile robot. They can simulate the environment of the mobile robot. Cameras and laser radar are integrated in the mobile robots to detect the surrounding environment. Motors, control board, cameras and laser radar are connected by serial ports.
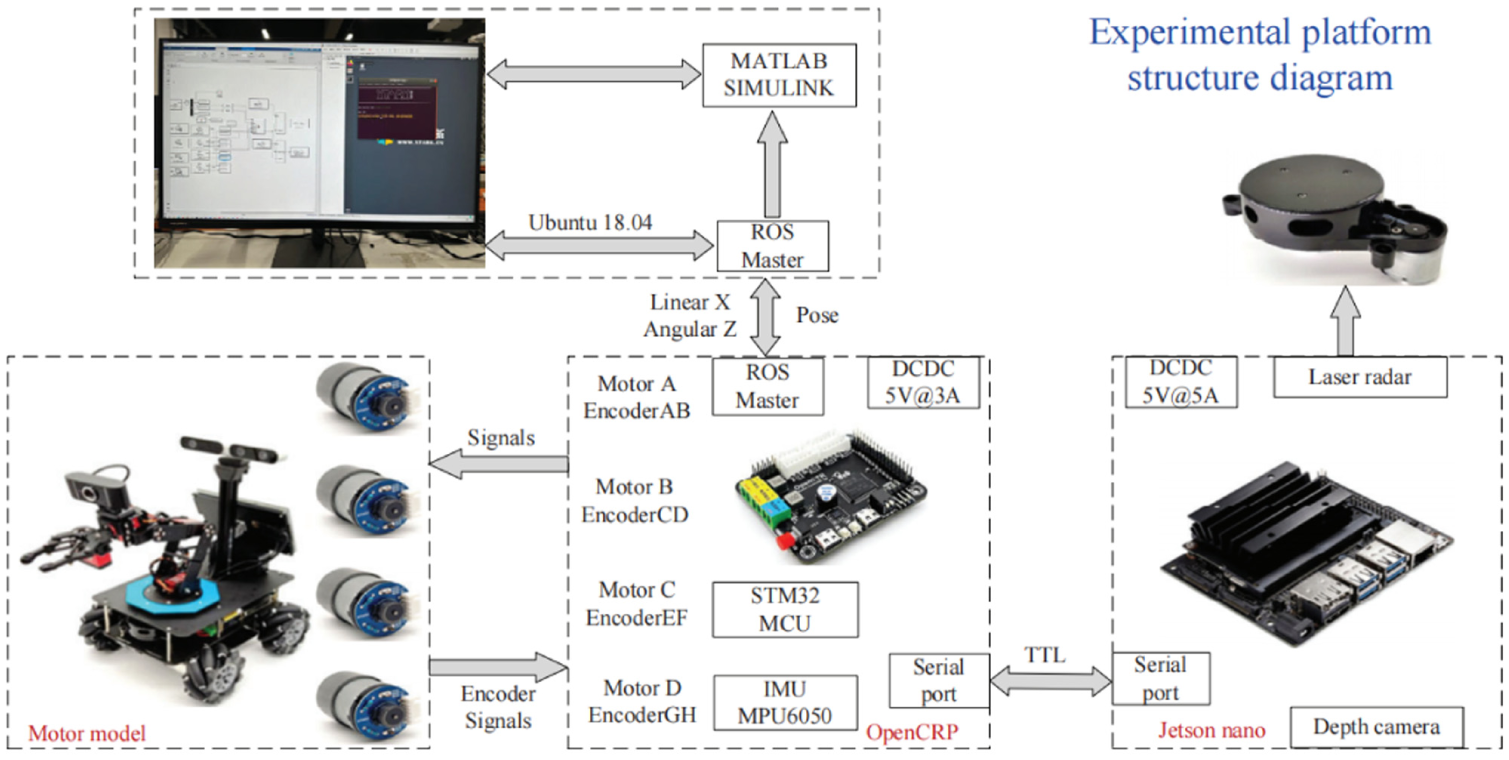
Experimental platform.
Three robots are considered in the experiment. The communication graph is shown in Figure 19. The system model is given by (44) where
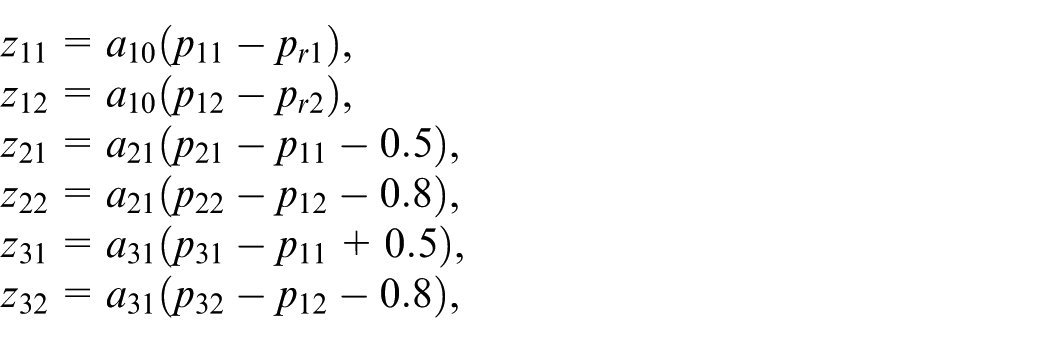
The logic-based switching rule is given by (31). The leader signal is given by:
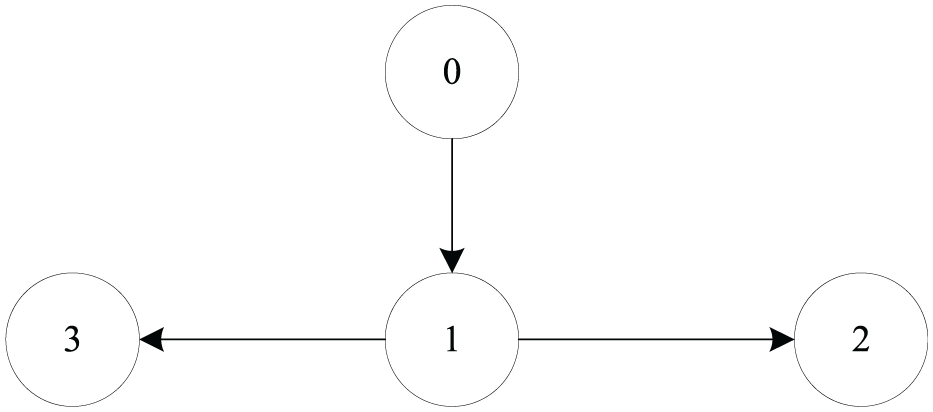
Communication graph.
The experimental results are shown in Figure 20. We can see that the three robots quickly reach a steady state despite the unknown control direction. Meanwhile, we can see that
Tracking performance in experiment.
Tracking error in experiment.
State trajectories in experiment.
Three robots in experiment.
Conclusions
In this paper, we propose two kinds of switching adaptive control for leaderless and leader-following consensus of multiple robots. The proposed leaderless consensus method can steer all the agents to a comment value in finite time, while the leader-following consensus method can make all the agents track a desired reference value in a prescribed finite time. New supervisory functions and switching rules are constructed to adaptively tune the control gains. It is shown that the proposed method can deal with heterogeneous unknown control directions and complex nonlinearities. A key feature of the constructed supervisory function is that it is local and only dependent on local state information. No neigborhood/global information are needed. Simulations and comparison with traditional Nussbaum gain methods have demonstrated the advantages of the designed controller.
The proposed method has several limitations: First, the implementation of the logic-based switching rule may need some extra computation resource. Second, when the number of the agent is increasing, the complexity of the proposed method may increase. Last, the proposed method has not been used in real engineering environment. These limitations will be considered in our future work.
Footnotes
Consent to participate
This article does not contain any studies with human or animal participants.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation of China (52375520)
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.