
Abstract
This article investigates the speed tracking estimation problem for the subway system under uncertain bounded disturbance. Firstly, the nonlinear running model of the train with dynamic descriptions is formulated, which contains traction/braking force, basic resistance, gradient, and uncertain disturbance under different conditions. By modeling the linearization error as uncertain parameters, a convex optimization problem of Kalman-like nonlinear estimator is established. Then, a robust speed tracking method is designed based on linear matrix inequalities and bounded recursive optimization idea, and the sufficient conditions to ensure the bounded stability of the nonlinear estimator are derived. Therefore, an effective solution to the stability problem of the designed nonlinear estimator with unknown disturbance statistical characteristics is given. Finally, the actual operational data of Ningbo Metro Line 7 is employed to verify the effectiveness of the proposed method.
Keywords
Introduction
With the rapid and all-encompassing development of smart cities in China, the public’s increasing demand for transportation capacity has brought unprecedented challenges to urban transportation systems, and the subway system has become the key to solving the dilemma of urban public transportation with its many superiorities. 1 In particular, the automatic train operation (ATO) system enables fine management and optimal scheduling of train operations by utilizing advanced control strategies, precise sensor technologies, and efficient communication technologies. 2 Most importantly, the safe operation of the train is ensured through comprehensive monitoring and rapid fault diagnosis.
Related work
The trajectory tracking problem is a crucial issue in train operation monitoring, especially speed profile tracking. In fact, the automatic train speed regulation module is a key component of the ATO system. Based on the off-line speed profile, the speed tracking controller can be designed to realize the operation optimization of the train running time, running speed, stopping position, and departure interval. 3 In order to design stable and effective controllers, various train speed profile tracking control methods have been developed, such as proportional-integral-derivative (PID) control, 4 fuzzy control, 5 adaptive control, 6 model predictive control (MPC). 7 Though PID control is widely used for train tracking control, its performance degradation is inevitable in dynamic nonlinear train motion models with uncertain parameters. 8 Then, a comprehensive optimization method was proposed in Ref. 9 to track the speed profile of the train. Particularly, the nonlinear layered neural network was employed for speed profile tracking in Ref. 10 By combing neural network and PID control methodologies, a model-free adaptive controller was designed in Ref. 11 for achieving precise speed profile tracking. Consider various braking conditions and parameter uncertainties, 12 constructed an adaptive neuro-fuzzy inference system model to capture the characteristics of running train. Moreover, a MPC-based profile tracking controller was proposed in Ref. 13 to deal with uncertain parameters and varying speed, and Liu et al. 14 developed a predictive fuzzy proportional-integral-derivative control method for suspended permanent magnetic maglev train.
To improve the performance of the speed controller, the observer or estimator can provide accurate speed tracking information for controller designing. 15 Since the actual modeling of train operation system is nonlinear, the extended Kalman filter (EKF) 16 was usually employed for nonlinear target tracking problems. 17 Since EKF utilizes Taylor series for linearizing operation, while the linearization errors and the uncertainties are ignored in this process. Though the second order EKF 18 reduces the linearization errors, the Hessian matrix is difficult to be calculated and computationally intensive. Then, the unscented Kalman filter (UKF) 19 and cubature Kalman filter (CKF) 20 were proposed by sampling sigma points to approximate the probability distribution of the system. In Ref., 21 an adaptive maximum correntropy UKF tracking method was developed based on multi-layer isogradient sound speed profile. However, the UKF and CKF performed a sensitive to nonpositive definite covariance matrices. Moreover Hu et al., 22 adopted a statical linear regression method to linearize the nonlinear systems. Unfortunately, the above filtering methods require the system noises to obey Gaussian distribution, and the noise covariances need to be known in advance.
In fact, the uncertain disturbance during train operation often does not obey any random distribution,
23
and the statistical information is difficult to obtain accurately, but it is always bounded. Under this case, various
Motivation and contributions
Based on the above analysis, it remains a challenge to study the stable tracking algorithm for nonlinear systems with more general unknown but bounded disturbance. Therefore, this paper shall study the speed tracking estimation issue for metro trains under uncertain bounded disturbance. The main contributions of this study are summarized as follows:
(i) A robust recursive optimization tracking estimation method is proposed to deal with uncertain bounded disturbance, and the sufficient conditions for ensuring the bounded stability of the proposed nonlinear estimator are derived by modeling the linearization error as the state-dependent matrix with uncertain parameters.
(ii) Based on the actual operational data that was collected from the YLZ-YFL segment of Ningbo Metro Line 7, the tracking performance comparison of different disturbances and different nonlinear estimators are presented to show the effectiveness and the advantages of the proposed algorithm.
Notations:
Dynamics modeling and problem formulation
Motion equation and parameter
When analyzing the motion of a train along a track, the train is usually considered a mass point. 32 Since the modeling of train kinematics equations usually only considers the forces acting in the forward direction of the train along the track, the longitudinal motion equation of the train can be modeled by Newton’s laws and described as the following time-varying model:

where
Notice that, the moment of inertia will cause a mismatch between the mass of the train and its static mass during train operation. In this case, the train mass shall be amended as rotational mass in the dynamic calculation. Then, the computation of the rotational mass is given by:

where
In practice, the motor drives the train through traction/braking control, where the maximum output traction and braking force of the motor varies with the running speed of the train. Therefore, the maximum traction/braking force can be determined by the following equations at a specific operating speed:

where
It has been verified that the ATO system determines the percentage output of the force signal.
33
In this case, the percentage of maximum traction/braking force output is employed for train controlling, and then the traction/braking force
where
On the other hand, resistance is also an important component of train operation, which including basic resistance, gradient resistance and uncertain disturbances. Then, the resistance

where
In fact, basic resistance is mainly caused by mechanical and aerodynamic resistance, which is usually molded by the Davis formula 2 :

where
Meanwhile, gradient resistance is usually arisen from track gradients, which is determined by:

where
According to the requirements of track construction standards, the slope gradient is small enough, and then
Model foundation
It is noted above that trains are also affected by traction force, braking Force and resistance. Then, from (1)–(7), the longitudinal motion model is modeled as
Where
It follows from (8) that

where
To facilitate numerical calculation and analysis in the computer, the continuous system (10) is discretized as

where
Meanwhile, according to the relationship between position and velocity, the position model can be modeled as

Then, the motion model of the train can be described by

Where
Moreover, the sensor can be used to monitor the motion of train, where the measurement model of the sensor can be described by

where

where
Problem formulation
Based on the measurements
where
Consequently, the problems to be addressed in this paper can be summarized in the following aspects:
To obtain the estimator gain
To construct stability conditions such that the square error of the designed estimator (17) is asymptotically bounded.
Main results
In this section, a nonlinear estimator is designed for tracking the speed of the train. First of all, a useful lemma is introduced as follows before deriving the main results:

holds for all matrices

Define
By using the first-order Taylor series to expand the nonlinear function
where

It follows from (18)–(20) that
where
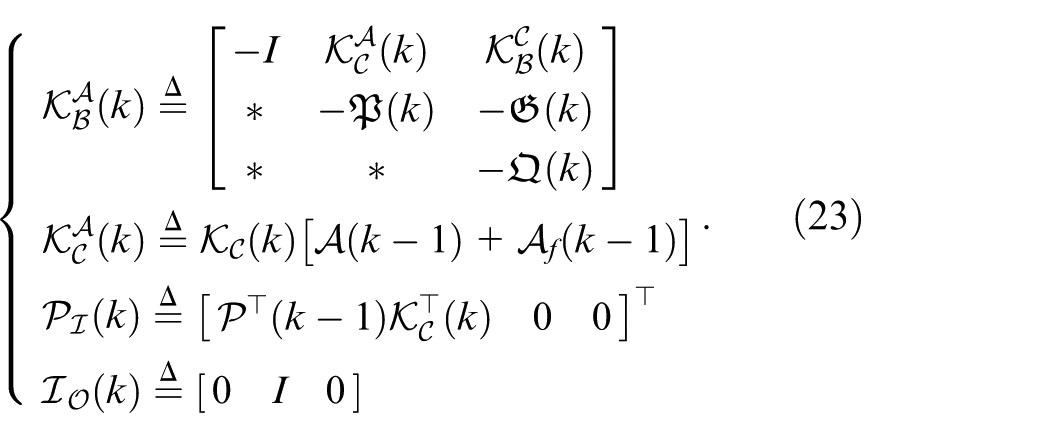
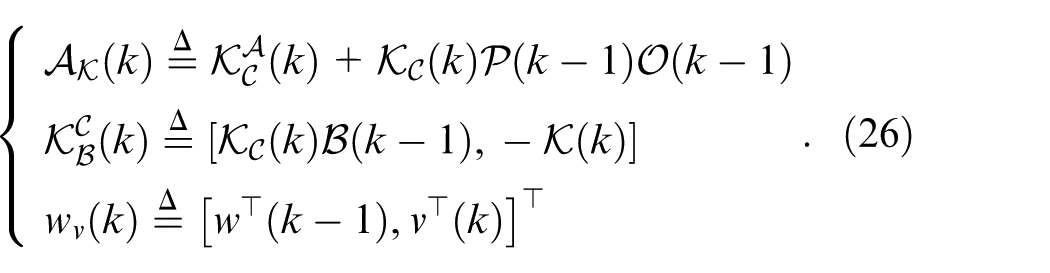
Whereafter, the estimator gain
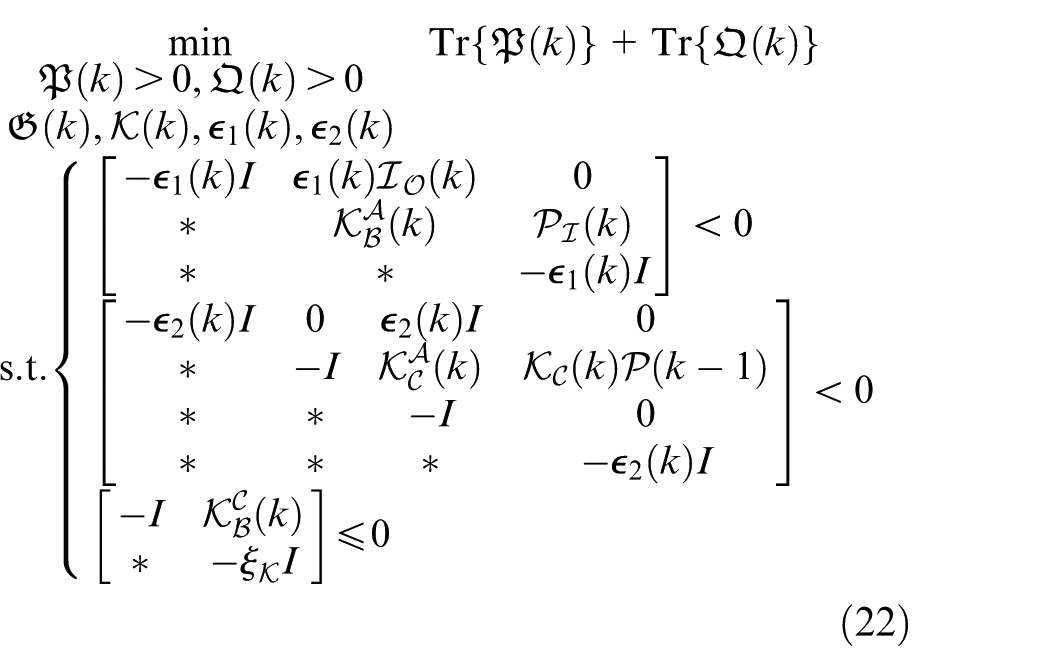
where
In this case, the square error of the estimate

where

where
Then, introducing an index performance 37 to construct the upper bound of the square error of the designed estimator (17):

where
Let
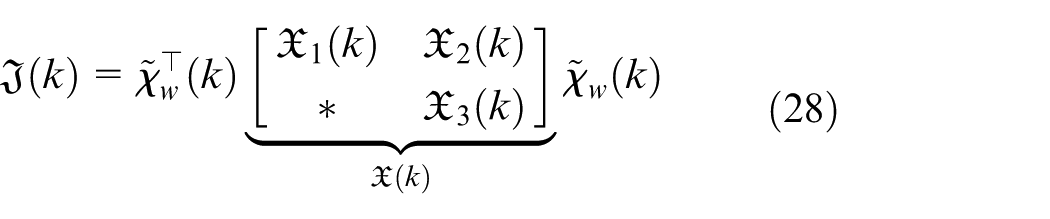
where
Meanwhile, it can be deduced from
Obviously, the right term of (30) can be viewed as an upper bounded of
It is derived from Lemma 1 that the first inequality in (20) holds if and only if (31) holds.
Notice that

Based on (30) and (32), “
Moreover, the stability of the tracking error should be considered. It follows from (25) and the similar derivation in Ref.,
38

where
Simulation example
The Ningbo Metro Line 7 is used in this section to validate the tracking performance of the designed nonlinear estimator (17).
In detail, this line consists of 25 stations and has a total length of approximately 40 km. Meanwhile, the train has an unladen weight of 212,904 kg and a fully loaded weight of 339,864 kg. Since different operating sections have different passenger loads, the train mass data simulated during off-peak hours are shown in Table 1. By using the train’s mass, rotational mass, maximum traction force, and maximum braking force, the maximum and minimum accelerations of the train are 16,848 and −14,139.36 km/
Train mass of off-peak hours.
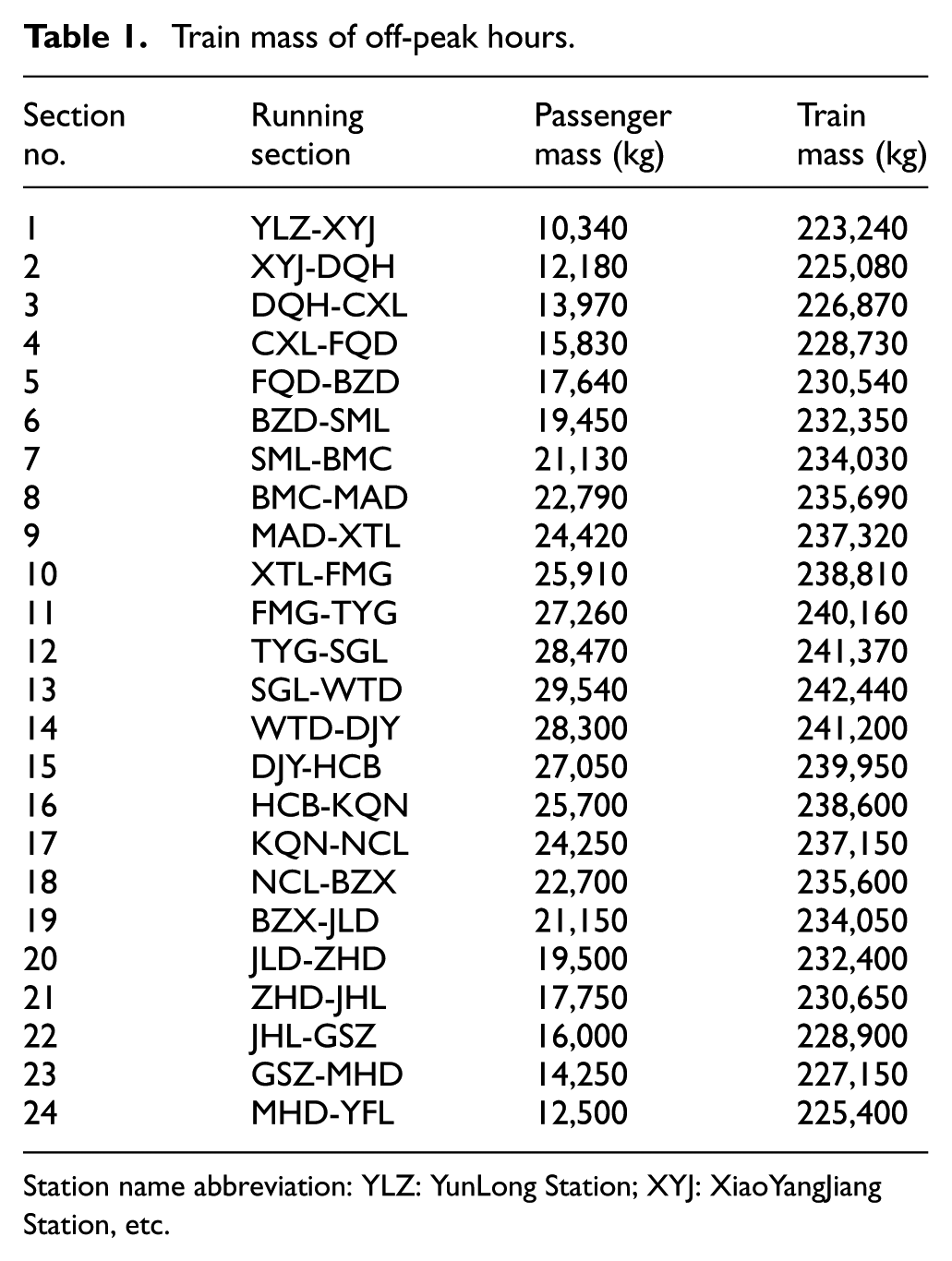
Station name abbreviation: YLZ: YunLong Station; XYJ: XiaoYangJiang Station, etc.
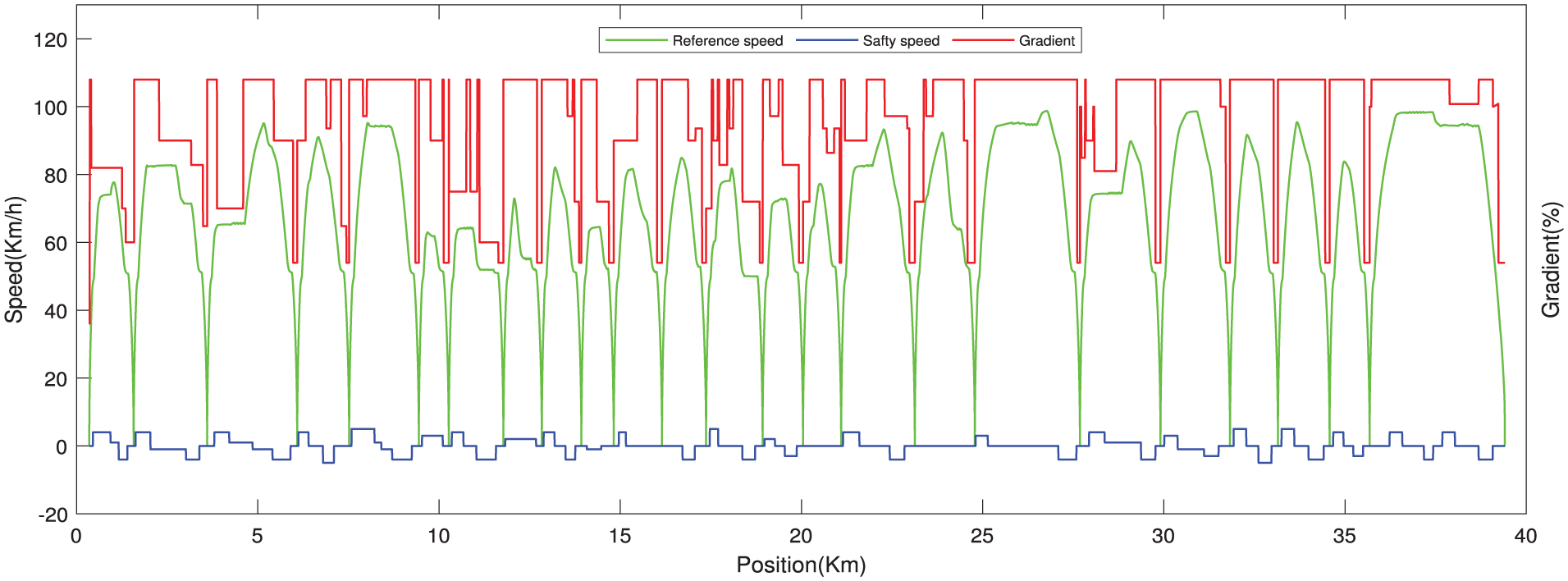
The safety speed, reference speed and gradient of the Ningbo line 7.
The basic resistance parameter in (10) is set as

where
By implementing the tracking algorithm that proposed in Section 3, the actual position trajectory of running section YLZ-XYJ, the tracking trajectory of the proposed method, EKF, UKF and CKF methods are shown in Figure 2, which shows that all nonlinear tracking methods can track the train’s motion trajectory well. Figure 3 shows the safety speed, true speed of the train, and the speed tracking effect of the proposed method, EKF, UKF and CKF methods are also plotted. It can be seen from this figure that the proposed method has a better tracking performance.
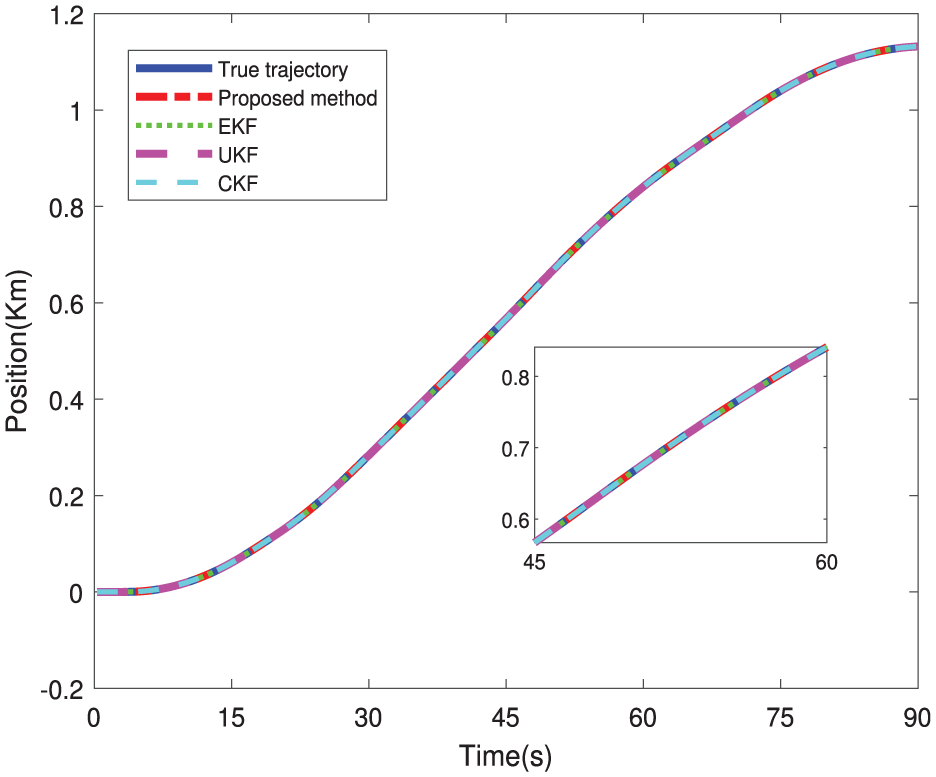
The position tracking trajectory of proposed method and different nonlinear estimation methods for section YLZ-XYJ.
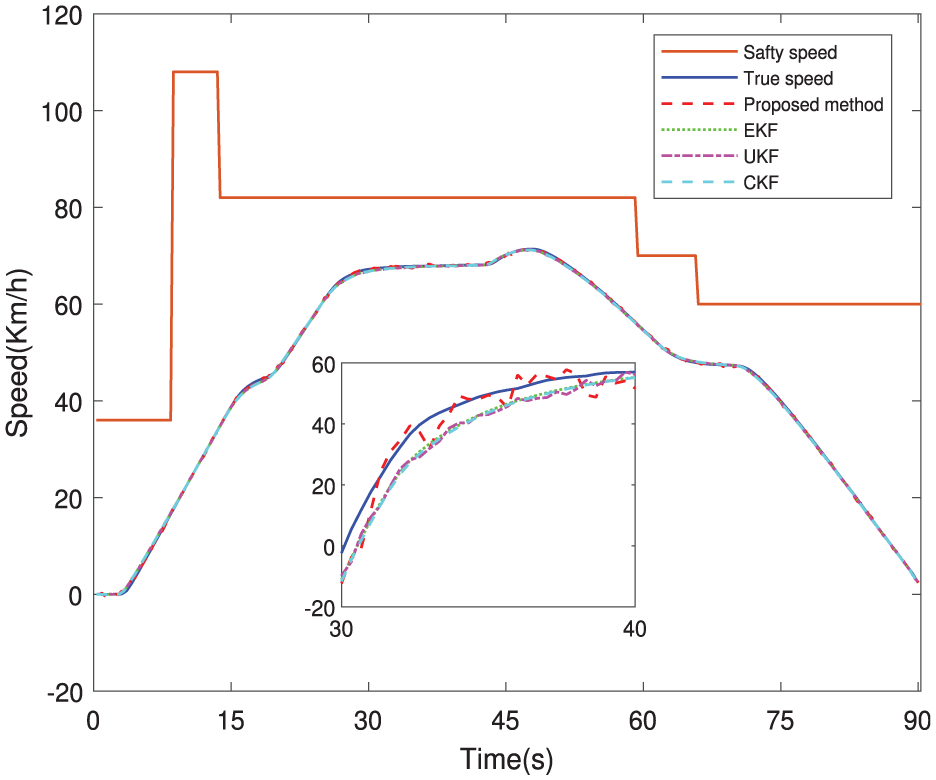
The speed tracking trajectory of proposed method and different nonlinear estimation methods for section YLZ-XYJ.
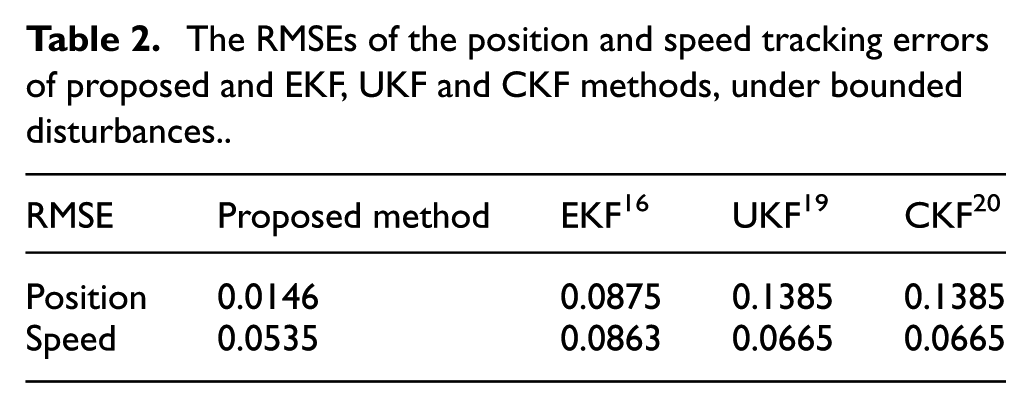
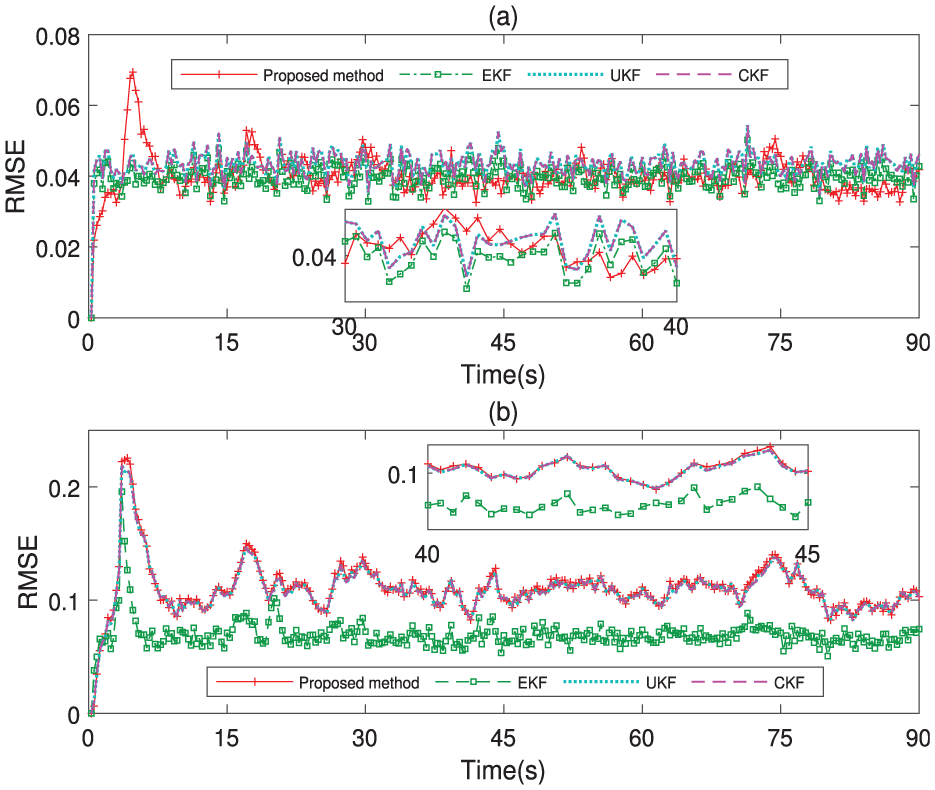
To clearly display the tracking precious of the proposed method, the root mean square error (RMSE) is employed to assess the tracking performance. Meanwhile, the classical nonlinear estimation methods (such as: EKF, 16 UKF, 19 CKF 20 ) are presented to show the advantages of the proposed methods. Then, the RMSEs of these nonlinear estimation methods with 100 Monte Carlo simulations are given in Figure 4. It can be visualized from this figure that the proposed method in this paper has better performance in both position and velocity tracking. In particular, a numerical table of RMSEs of different methods is presented in Table 2, which shows the proposed method has a lower tracking error intuitively.
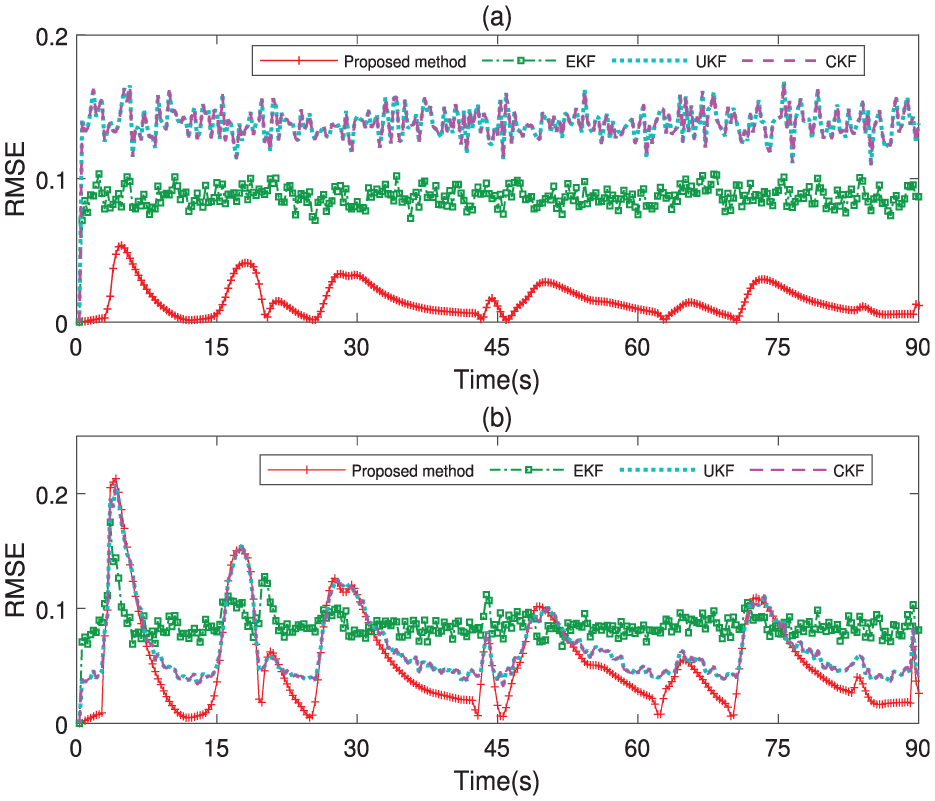
The comparison of tracking performance under bounded disturbances: (a) The position error of the proposed method and EKF, UKF and CKF methods; (b) The speed error of the proposed method and EKF, UKF and CKF methods.
The RMSEs of the position and speed tracking errors of proposed and EKF, UKF and CKF methods, under bounded disturbances.
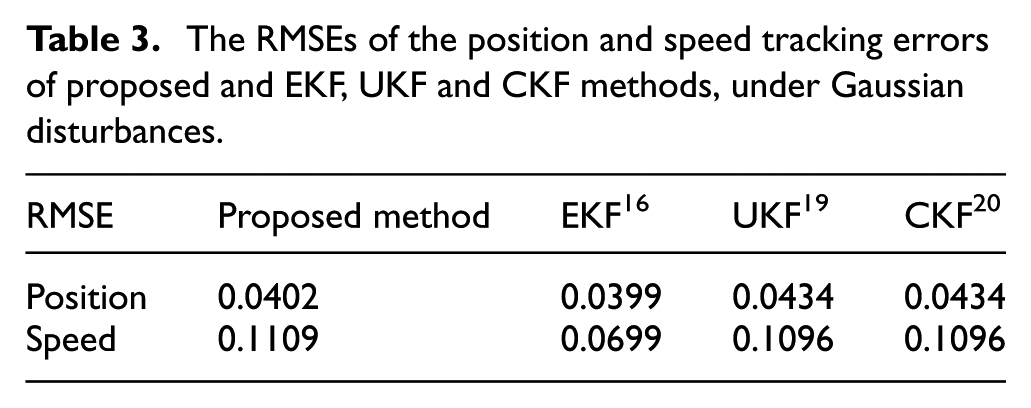
Since the proposed method is mainly dealing with bounded disturbances, the EKF, UKF, and CKF requires a priori statistical information of the disturbance. Therefore, assuming that the motion and measurement disturbance of a running train obey Gaussian distribution, and statistical information are
The comparison of tracking performance under Gaussian disturbances: (a) The position error of the proposed method and EKF, UKF and CKF methods; (b) The speed error of the proposed method and EKF, UKF and CKF methods.
The RMSEs of the position and speed tracking errors of proposed and EKF, UKF and CKF methods, under Gaussian disturbances.
Conclusion
In this article, a robust recursive optimization estimation method was proposed for speed tracking of subway system. Specifically, the nonlinear model with dynamic descriptions was formulated to describe the actual train running. Then, a Kalman-like nonlinear estimator was designed by modeling the linearization error as state-dependent matrix with uncertain parameters. Particularly, a convex optimization problem was established to determine estimator gain, and the bounded stability conditions of the designed nonlinear estimator were also derived. Finally, the effectiveness of the proposed method was verified by the actual operational data of Ningbo Metro Line 7.
Noted that the key to the proposed robust estimation method relies on solving the convex optimization problem, the computational complexity is mainly determined by the dimension and the introduced unknown parameters of the linear matrix inequalities. In this case, the proposed algorithm is more computationally intensive in high-dimensional systems. Therefore, how to design robust estimation algorithms with low computational complexity is one of our future works. Moreover, the limitation of network resources makes it difficult to transmit large amounts of information concurrently, and uncertainties such as delay, packet loss, and timing errors are inevitably incurred in the transmission process; how to design effective networked estimation algorithms will also be our future work.
Footnotes
Acknowledgements
The authors also gratefully acknowledge the helpful comments and suggestions of the Reviewers as well as that of the Editors, which have improved the presentation.
Ethical considerations
This article does not contain any studies with human or animal participants.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Author contributions
Writing—original draft, Writing—review and editing, Dongdong Liu and Guojun Yan; Conceptualization, Methodology, Resources, Xifeng Wang; Validation, Formal analysis, Dongdong Liu; Software, Formal analysis, Investigation, Rusheng Wang; All authors have read and agreed to the published version of the manuscript.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.