
Abstract
This paper investigates a dynamic event-triggered finite-time data-driven sliding-mode control method for bridge cranes subjected to limited communication resources and quantized data. Firstly, we partially feedback linearize the nonlinear bridge crane system and construct a fast terminal sliding mode surface, on the basis of which we design an adaptive sliding mode controller. Then, we formulate a dynamic event-triggered strategy to alleviate the communication burden by cutting down communication frequencies. Meanwhile, a quantized-based communication scheme is further developed to reduce the communication burden, where the data bit of the communication data is dramatically shrunk. Finally, the convergence of the formulated method is strictly demonstrated, and several simulations verify the effectiveness of the formulated method.
Keywords
Introduction
Bridge cranes 1 are indispensable equipment in modern industrial transport and are widely used in many fields, such as harbor loading and unloading, workshop lifting, and construction projects. The core issue of controlling the bridge crane lies in guaranteeing that the crane quickly and accurately reaches the designated position, where the load swing angle has been suppressed during the transport processes. In the past few years, numerous crane control methods have emerged. For instance, Li et al. 2 studied a vibration control approach, Yao et al. 3 investigated an adaptive tracking control algorithm, and Zhang et al. 4 designed an anti-swing control scheme. It is noted that although the existing methods are useful, those methods require that the dynamics of the controlled brigade cranes are available, which is a difficult requirement since the dynamics of bridge cranes are higher-nonlinear and are time-varying with the effects of application circumstances. Hence, the primary motivation of this paper is how to design a control method without depending on the dynamics.
To address the mentioned issue above, data-driven control methods have been formulated, including model-free adaptive control,5–7 iterative learning control,8–10 and reinforcement learning control.11–13 It should be pointed out that although those mentioned methods are meaningful, most of them only realize control error asymptotic convergence when time tends to infinite. However, in practical industries, convergence times or response speeds are primary indexes, whether for production quality or the work environment’s security. Especially for bridge cranes, the work efficiency is low if the response speed is slow. If the convergence times are unknown or uncertain, it will cause strict accidents at work. Hence, designing a data-driven control method with quick response speed and finite-time convergence is meaningful and challenging work.
It is noted that introducing sliding-mode control (SMC)14–16 is one of the useful ways to improve the response speed. Moreover, several results have been reported that selecting an appropriate sliding-mode surface can effectively design finite-time convergence control methods. For example, Rascón et al. 17 studied a finite-time terminal SMC algorithm, Lu et al. 18 investigated a finite-time nonsingular terminal SMC scheme, and Truong et al. 19 proposed a fixed-time prescribed performance model-free SMC approach. Although existing SMC methods can effectively guarantee that the control error converges in a finite time, the studies are in an infant stage, where many actual issues should be addressed, especially the communication limitation issues, which are not sufficiently considered. Hence, the primary impetus behind this paper is how to deal with communication limitation problems further.
As we know, event-triggered control20–22 is one of the meaningful methods to reduce communication frequencies to reduce the communication burden. Recently, many interesting methods have been devised. For instance, Zanjani and Mobayen 23 studied an event-triggered global SMC scheme for offshore container cranes, Tang et al. 24 investigated an adaptive event-triggered vibration control approach for bridge cranes, and Zhang et al. 25 formulated an adaptive neural network-triggered control algorithm for tower cranes. It ought to be mentioned that existing event-triggered methods can effectively reduce redundant data transactions, but those methods assume that the data bit of the communication device is infinitely large. In general, the data bit is limited by the technology of hardware properties. Hence, further solving this problem for the existing event-triggered strategies to improve the practicabilities is challenging.
Recently, as for the limited data bit of the communication device, scholars have started to study quantization techniques, including uniform quantization techniques26–28 and logarithmic quantization techniques.29–31 Since the logarithmic quantization has advantages of small quantizing distortion in decimal region, high computational efficiency, and avoiding data overflow, many interesting results have been reported, such as Fu 32 studied a tutorial on quantized feedback control method, Feng et al. 33 investigated a quantized tracking control approach, and Jia and Xu 34 designed a quantized-based global adaptive tracking control approach. It is noted that although several quantized-based control schemes have been developed, few of them are focused on bridge cranes. Hence, this paper is investigating a quantized-based control method for brigade cranes to realize digital communication and further solve the limited data bit issues of controlled bridge cranes.
Based on the analysis above, we study a dynamic event-triggered finite-time data-driven SMC for the bridge crane with quantized data, where the main efforts are summarized as:
Design a finite-time data-driven SMC approach for the bridge crane system. In contrast to the existing method, 35 the proposed approach is data-driven, offering improved response speed and ensuring that the control error converges to the origin within a finite time.
Develop a dynamic event-triggered communication strategy. Unlike the existing strategy, 36 the developed strategy alleviates the communication burden by minimizing unnecessary transmissions.
Formulate a logarithmic quantization scheme. Compared with the existing method, 37 the limitation issue of the data bit is declined, applicability is improved, and the controlled bridge crane can realize digital communications.
The rest of this paper is organized as follows: The “System Description and Preliminaries” section provides an overview of the controlled bridge cranes. The “Controller Design and Convergence Analysis” section outlines the design process of the method and its convergence analysis. The “Simulation Studies” section presents two simulation case studies to demonstrate the effectiveness of the proposed approach. Finally, the “Conclusions” section offers a summary of the paper’s findings.
System description and preliminaries
System description
The geometry construction diagram of the controlled bridge crane is given as Figure 1, and the dynamics 38 of the bridge crane is described as:


where

where
Applying partial feedback linearization, the crane system in equations (1) and (2) is translated as:


For simplicity, we set

where

Taking into account the actual operating conditions of the bridge crane system, the following assumptions should be considered without loss of generality.

The objective of this paper is to transmit the trolley and load to the specified position x
d
while suppressing the load swing angle

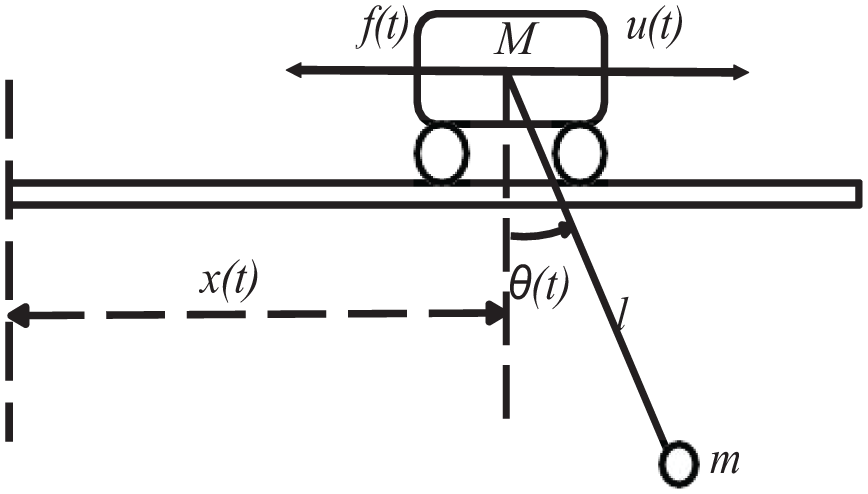
The geometry construction diagram of the controlled bridge crane.
Quantification scheme
To relieve the limitation of data bits, the transmitted data is quantized before being transmitted to the controller. In this paper, a logarithmic quantizer 39 is utilized, and the set of possible ranges of quantized data is described as:

where

where
Problem formulation
The main problems of this paper are listed as:
The dynamics model of the controlled bridge crane system is unknown. How to design a finite-time data-driven control method.
The control bridge crane system installs a slight-level communication device. How to reduce communication frequencies to relieve the communication burden.
The communication bandwidth is bounded, and digital communication is a mainstream demand. How to relieve quantized communication should be considered.
Controller design and convergence analysis
As shown in Figure 2(a), the controlled system consists of a controlled bridge crane, a sensor, an event-triggered detector, a controller, and an actuator. The sensor measures the data from the controlled bridge crane. Then, according to the measured and desired data, the tracking error is obtained, which will be quantized before it is transmitted to the remote controller. The controller receives the quantized data to update the control input. Moreover, if the event-triggered condition holds, the updated control input will be transmitted to the actuator. In addition, for more clearly illustrating the designed method, a flowchart is given in Figure 2(b).
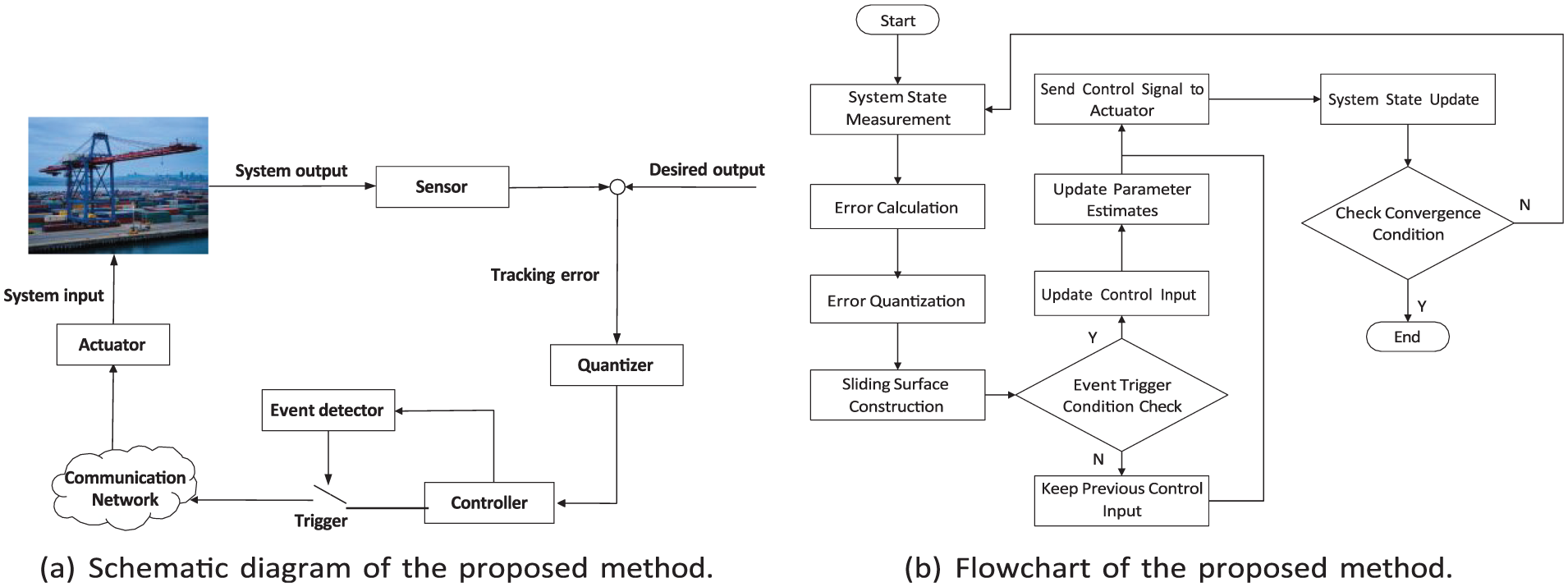
System workflow. (a) Schematic diagram of the proposed method. (b) Flowchart of the proposed method.
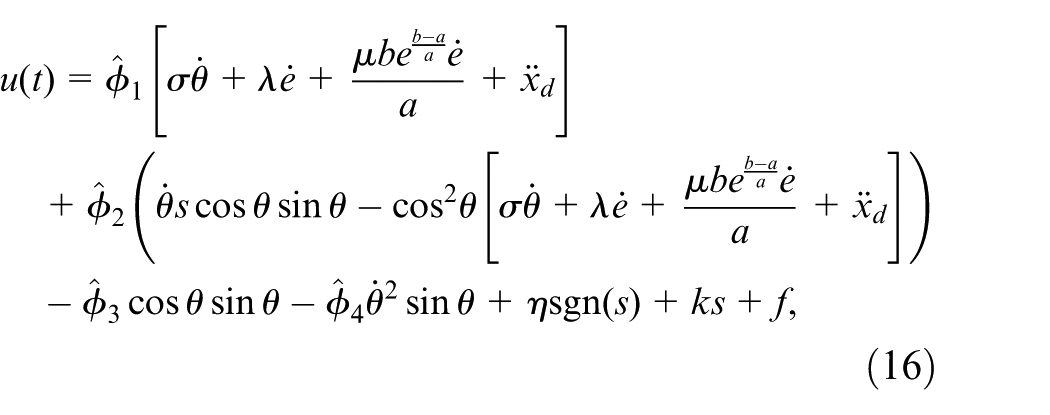
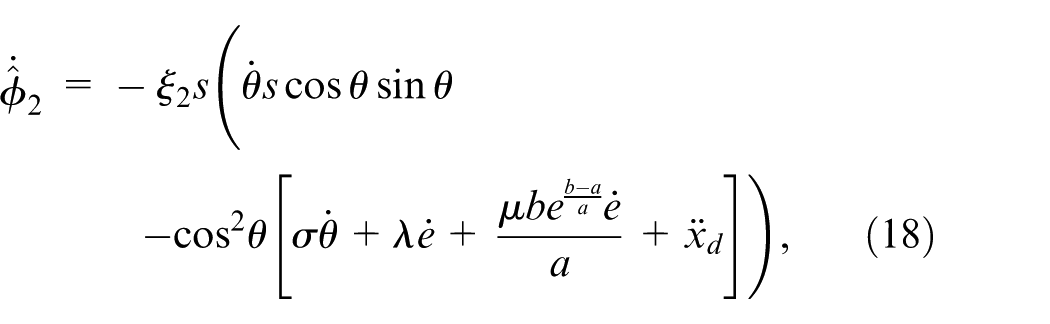
Design of the proposed controller
To enhance the bridge crane system’s control effectiveness, we strengthen the coupling between

where

In this paper, the deviation signal

Using sector bound method, 40 we obtain that:

where

where
where



where
Dynamic event-triggered mechanism
By this stage, we have completed the design of the data-driven SMC for the bridge crane with information quantization. To optimize the use of communication resources, a dynamic event- triggered strategy is employed for data packet transmission. Let the set of event-triggered instants be denoted as

where

where

Combined with equations (16) and (23), there will be an update of the control input when

Stability analysis

Construct the Lyapunov energy function

Taking the derivative of

Deriving equation (15) and bringing into equation (27), we get:
where
where
Based on Assumption 1 and equation (7), given that

Take the derivative of
Considering the bounded errors,
Taking into account the dynamic event-triggered strategy in equations (21) to (24), if the system does not meet the event-triggered condition, the system error will progressively increase until the next triggering time is reached. The proof of stability at the event-triggered time is given in the above process. At this point, the proof of Theorem 1 is accomplished.□

By constructing an auxiliary function and taking its derivative, we obtain:


Therefore, equation (33) can be converted into:

The general solution of equation (36) is:

When
Evidently, when e = 0, the control objective is met, meaning y = 0. Let’s denote this time as

After calculating, we finally get:

This indicates that the time from the initial state of the system to convergence is

Hence, further reducing the effects of a sign function is meaningful work in the future.
Simulation studies
To validate the effectiveness of the proposed method, we developed a simulation platform using MATLAB/Simulink. The parameters for the controlled bridge crane system are set as
Example 1
The desired output of the controlled bridge crane is set as:

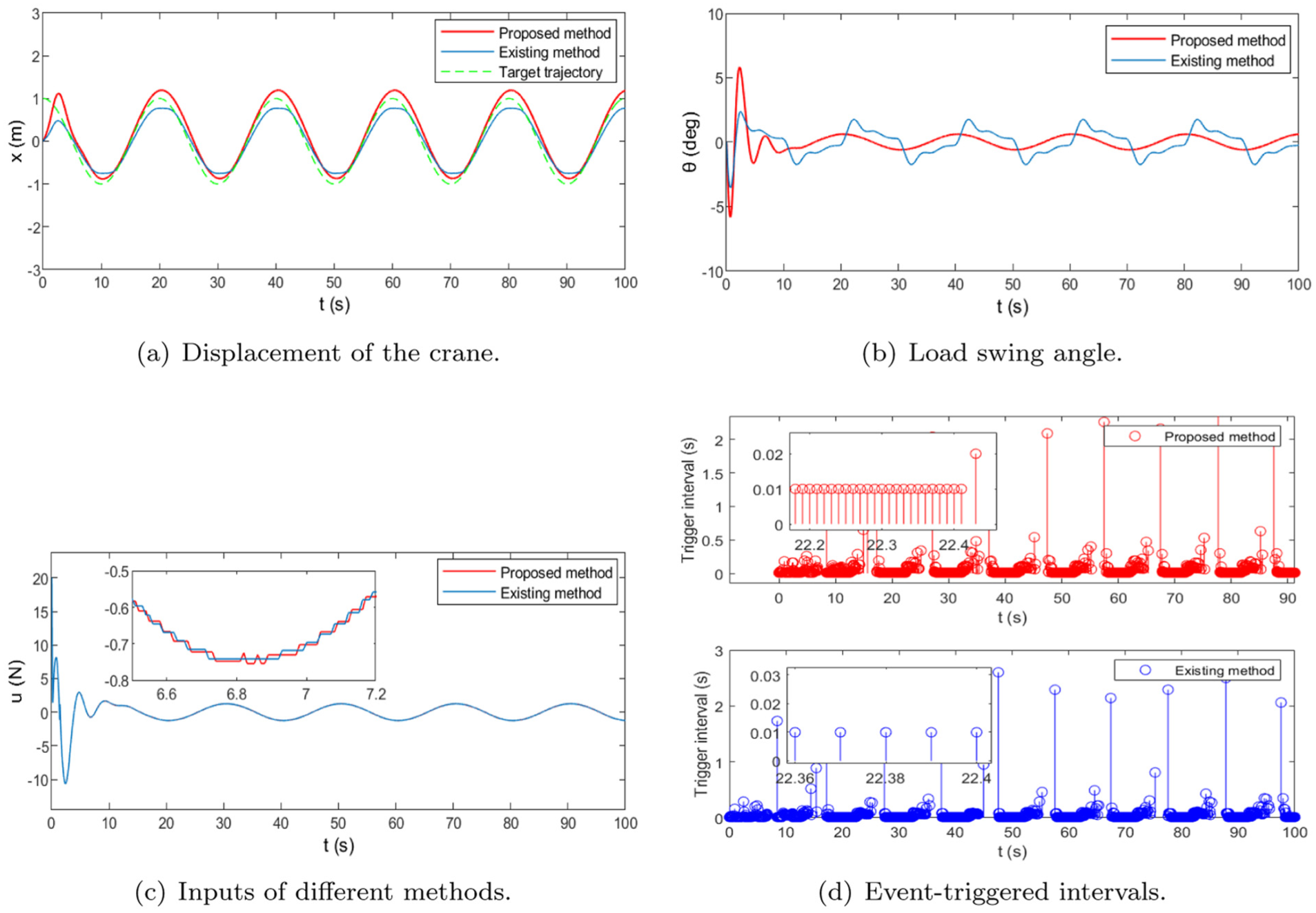
The results are presented in Figures 3 and 4. Figure 3 demonstrates the results of the designed and existing methods. In Figure 3(a), it can be seen that the proposed method has overshooting to some extent. Still, compared with the bridge crane controlled by the existing method,
36
it converges faster and reaches the specified position in about 4 s. In contrast, the crane under the control of the existing method
36
slows down as it gradually approaches the specified position and finally reaches it in about 6 s. According Theorem 2, the arrival time
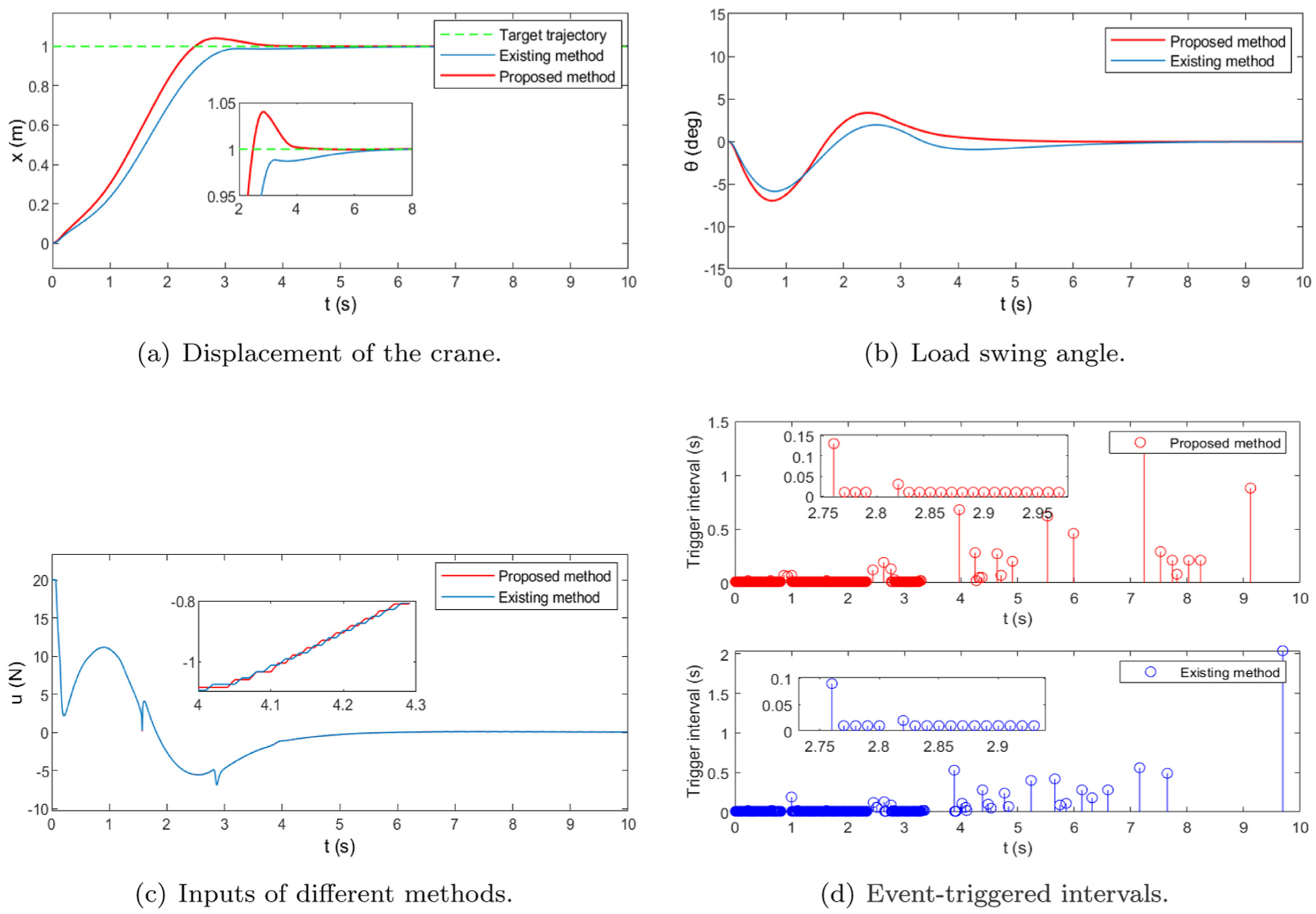
Result of the bridge crane with fixed outputs. (a) Displacement of the crane. (b) Load swing angle. (c) Inputs of different methods. (d) Event-triggered intervals.
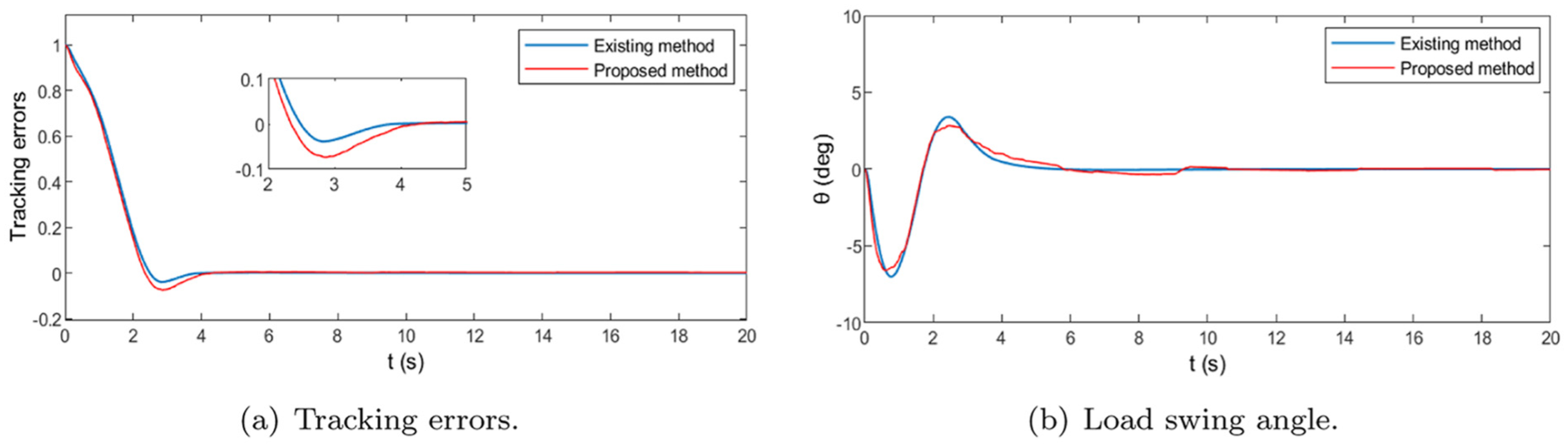
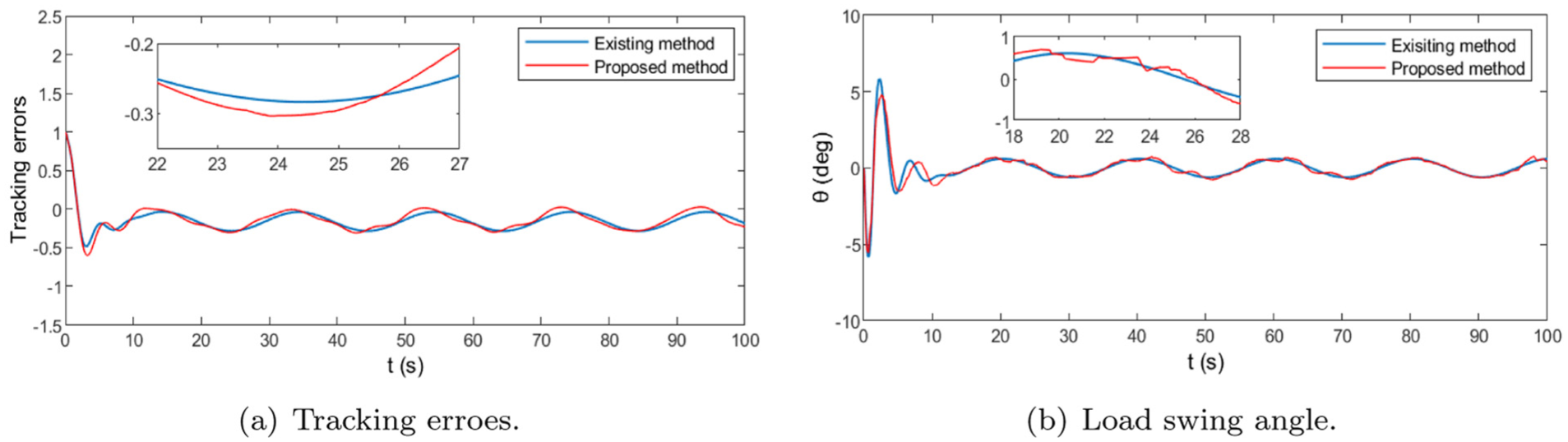
Effects of the proposed quantization scheme. (a) Tracking errors. (b) Load swing angle.
From Figure 3(b), the proposed method is able to make the load angle stop swinging immediately after reaching the specified position. In contrast, the load angle of the existing method 36 still takes some time to stop after the trolley reaches the target position.
As shown in Figure 3(c), the results obtained from the designed method are comparable to those of the existing method. 36 However, Figure 3(d) depicts the differences between the two event-triggered strategies, and it is clear that both event-triggered strategies greatly save communication resources. The abscissa represents the moment of triggering, and the ordinate represents the time interval from the previous departure moment. The sampling time is set as 0.01 s. When the total running times are about 400 sampling times, the proposed method is event-triggered 265 times, and the existing method 36 is event-triggered 284 times, which saves 33.75% and 29% of the communication resources, respectively. The proposed strategy saves nearly 5% more communication resources than the existing one. 36
The system performance after considering quantization is shown in Figure 4. From Figure 4(a), the convergence of the system error slows down due to error quantization. The consequent effect is also reflected in the load swing angle, as shown in Figure 4(b), which approaches the target with a slight oscillation and finally takes some time to stop. However, in a real system, this residual oscillation is expected due to the limitations of quantization accuracy and the nature of feedback control.
In addition, another contrast experiment is conducted to further verify the superiority of the designed method, where the results are presented in Figure 5. The blue curve results from the existing method, 35 which is a model-based finite-time control method. Due to the dynamic reconstruction error of the existing method, the convergence speed and steady state error of the designed method are quicker and smaller.
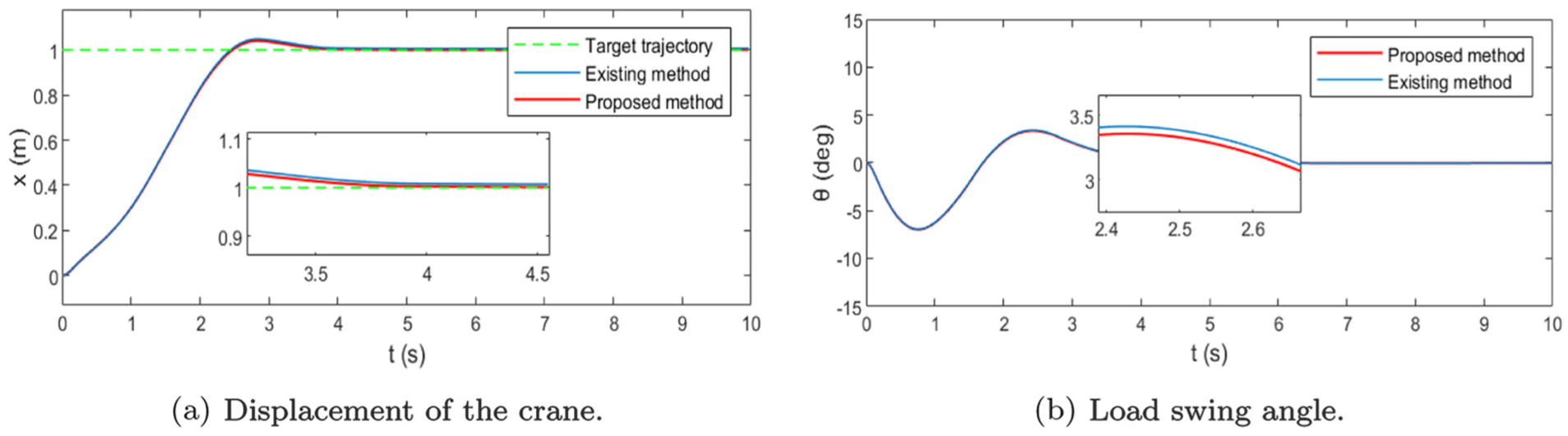
The bridge crane with different methods. (a) Displacement of the crane. (b) Load swing angle.
Example 2
The desired output of the controlled bridge crane is set as:

From Figure 6, it is noted that the designed and existing methods guarantee that the brigade crane implements time-varying trajectory tracking tasks. However, it is important to note that the proposed method exhibits some degree of overshooting, while the existing method 36 fails to reach the desired target fully. As shown in Figure 6(b), the proposed method is more effective in suppressing the load swing angle compared to the existing method.
Result of the bridge crane with time-varying outputs. (a) Displacement of the crane. (b) Load swing angle. (c) Inputs of different methods. (d) Event-triggered intervals.
Figure 6(c) shows the changing curves of the control inputs. Moreover, Figure 6(d) depicts the triggering intervals. It is noteworthy that both two strategies significantly save communication resources. In the 10,000 sampling times, the proposed method is event-triggered 4418 times, and the existing method is event-triggered 4650 times, which saves 55.82% and 53.50% of the communication resources, respectively. The proposed mechanism saves 2.3% more communication resources than the existing one. 36
Figure 7 depicts the change in system performance after adding quantization. It is found from both Figure 7(a) and (b) that after adding quantization, the change in the signal is not continuous but increases and decreases one level at a time. Furthermore, the tracking error of the system increases slightly, with little change in the overall change in the load swing angle.
Effects of the proposed quantization scheme. (a) Tracking errors. (b) Load swing angle.
Sensitivity analysis
In this part, the parameters are set to be the same as those in Example 1, with only one parameter being altered at a time to examine how different values impact system performance. As seen in Figure 8(a), it is observed that the parameter k in equation (16) influences the system’s output. The lager the value of k is, the faster the system can reach the specified position, but the overshoot will also be larger. Nevertheless, it is essentially unchanged concerning the time reaching the desired position x0, which is also in agreement with Theorem 2. Furthermore, the convergence times of the system are solely dependent on the parameters in equation (15) and are independent of the coefficients of s. Therefore, we need to consider the arrival speed of the system and the overshoot of the system to prevent undesirable consequences. Figure 8(b) illustrates the relationship between the quantization density ρ and the tracking error, showing that as the quantization density increases, the tracking error of the system decreases. The relationship between the dynamic event-triggered parameter ω and the number of event-triggered instances is shown in Figure 8(c). As ω increases, the number of event-triggered instances decreases, further reducing communication costs.
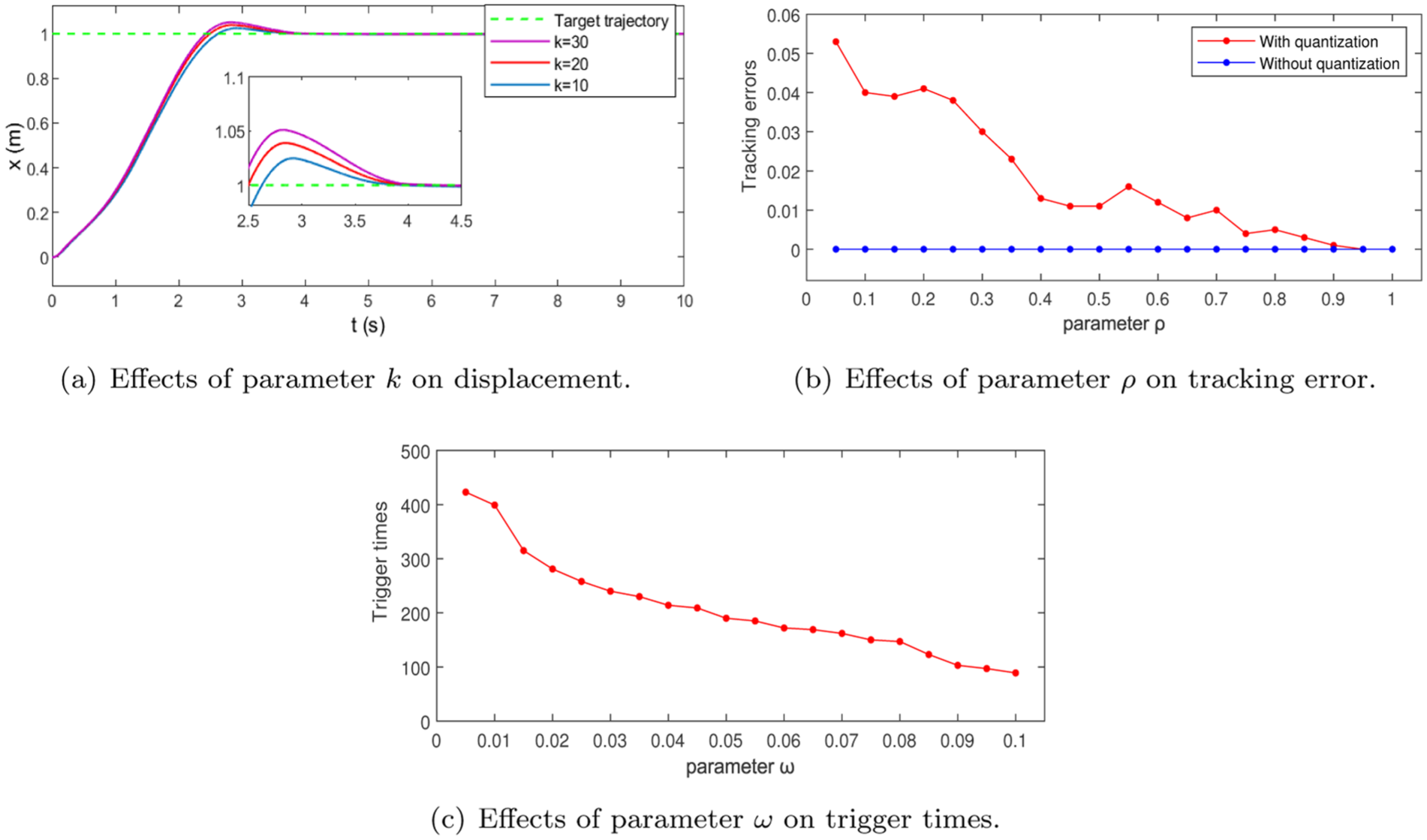
Sensitivity analysis. (a) Effects of parameter k on displacement. (b) Effects of parameter ρ on tracking error. (c) Effects of parameter ω on trigger times.
Conclusion
This paper designed a dynamic event-triggered finite-time data-driven sliding mode control approach for the bridge crane system with limited communication and quantized data. First, the proposed control scheme offers faster convergence compared to existing methods. Second, the designed dynamic event-triggered strategy effectively conserves communication resources, outperforming the existing event-triggered strategy. Finally, the quantified data issues have been investigated, and the developed method can employ the quantified data to realize fixed and time-varying tracking tasks. In our future efforts, the results of this paper will be expanded to multiple bridge crane systems, and further, to realize fixed-time or predefined-time control is a meaningful research topic.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Wuxi Science and Technology Development Fund Project (K20231015), in part by the Jiangsu Province Young Science and Technology Talent Support Program (JSTJ-2025-544), in part by the Wuxi Young Science and Technology Talent Support Program (TJXD-2024-114), in part by 111 project (B23008), and in part by the EU iMARs project (HORIZON-MSCA-2023-101182996).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Author contributions
Peng Wang : Conceptualization, Methodology, Software, Writing - Original Draft. Huarong Zhao: Methodology, Investigation, Writing - Review & Editing, Fundingacquisition, Supervision. Jie Wu: Visualization, Writing - Review & Editing. Hongnian Yu: Writing - Review & Editing.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.