
Abstract
This article focuses on the issue of non-fragile robust control for a class of nonlinear systems with uncertain structural perturbations based on state observer. The nonlinearities are described by incremental quadratic constraints, which unify numbers of nonlinearities encompassed in recent literature in a framework. A non-fragile observer is first proposed to estimate the state of this system. As a consequence, non-fragile robust control design is utilized to construct an observer-based controller to render asymptotical stabilization. Moreover, a sufficient condition guaranteeing the asymptotical stability of the closed-loop system is formulated in terms of linear matrix inequalities without employing any equality constraints. Numerical simulations on a Lorenz chaotic system demonstrate the validity of the observer-based non-fragile control scheme.
Keywords
Introduction
During the past two decades, non-fragile control has been attracting lots of attention since inaccuracies or uncertainties may occur in the implementation of a constructed controller. The fragile problem of a designed controller can be dated back to the pioneering work of Keel and Bhattacharyya, 1 where they demonstrated that the optimal control system may lead to unstable even for a tiny change in the controller’s parameters. Since then, various intriguing results on non-fragile controllers were reported by researchers in lots of literature. For instance, Balandin and Kogan 2 investigated the synthesis of non-fragile controllers utilizing linear matrix inequalities (LMIs). Ma et al. 3 addressed the issue of non-fragile guaranteed cost control for microbial fuel cells. Non-fragile consensus control for nonlinear multi-agent systems under periodic denial of service attacks was studied. 4
It is worth mentioning that most of the aforementioned non-fragile controllers or filters were designed via state feedback. However, in many physical systems the whole or partial states, the external disturbances may not all be measurable. As a consequence, state estimation is of great significance in control design. Over the past decades, numerous effective approaches of observer design have been developed in existing literature (see, just to mention a few,5–8,10). For example, Liu et al. 8 introduced an intermediate observer to estimate the relative motion information and the disturbance for delayed electromagnetic docking spacecraft in elliptical orbits, which was further developed by Lyu et al. 9 A predefined-time disturbance observer was designed in Zhang et al. 10 to estimate and compensate the external disturbances for attitude tracking control of quadrotors. More recently, Shen et al. 11 developed a novel iterative proportional-integral observer and extended it to get tighter interval estimation for system states and disturbances of discrete-time linear systems.12,13
Consequently, on the basis of the estimated states, how to construct a non-fragile controller or filter has became a fundamental issue for non-fragile control synthesis. Till now, this issue has been well-studied for linear systems by means of observer-based feedback. For instance, Lyu et al. 14 designed a hybrid non-fragile observer to estimate state and disturbance simultaneously for flexible spacecraft. However, for general nonlinear systems, the problem of observer-based non-fragile control remains unsolved (see, e.g. Liu et al., 15 Yang and He, 16 Lu and Ren 17 ). For uncertain time-delay Lipschitz nonlinear systems, Liu et al. 15 proposed a sliding-mode control approach based on non-fragile observers. For a class of Lipschitz nonlinear systems with structural uncertainties, Yang and He 16 presented a non-fragile observer-based robust control scheme. Very recently, Lu and Ren 17 constructed a novel non-fragile observer-based controller for discrete fuzzy descriptor systems with nonlinear disturbances.
Note that in order to tackle the state estimation problem for different kinds of nonlinear systems, many helpful observer design methods have been reported in literature. For example, for Lipschitz nonlinear systems, observers were developed in Yang and He 16 and Zemouche and Boutayeb 18 Observers for systems satisfying one-sided Lipschitz (OSL) constraints were investigated in Zhang et al.,19,20 which showed that the OSL constants could be significantly smaller than the usual Lipschitz constants. Recently, Açıkmeşe and Corless 21 introduced the so-called incremental quadratic constraint (IQC). This condition unifies numerous types of common nonlinearities by introducing incremental multiplier matrices. It is shown that both Lipschitz and OSL conditions could be included in the framework of IQC.22,23 As a consequence, observers for nonlinear systems satisfying IQC have been developed in,24–28 which were applied to secure communication in Zhao et al. 29 for chaotic systems. More recently, Xu et al. 30 has developed observer-based controllers for systems with IQC and external disturbances. The above-mentioned observations inspired us to investigate the issue of observer-based non-fragile control for incremental quadratic nonlinear systems with uncertain perturbations.
On the other hand, there still exist many unsolved difficulties on solving the problem of bilinear matrix inequalities (BMIs) for observer-based control (see, e.g. Zhang et al., 31 Lien, 32 Kheloufi et al., 33 Wu et al., 34 Li et al., 35 and the reference therein). To tackle the problem, Lien 32 utilized an equality constraint, which may not be satisfied with many physical systems. And then Kheloufi et al. 33 proposed a new approach by employing the Young relation. However, Wang and Jiang 36 compared these two methods and showed that Kheloufi’s method was more conservative than Lien’s. Therefore, how to cope with the BMI problem in observer-based control without utilizing any equality constraints also motives the current study.
In the article, we focus on the observer-based non-fragile robust control for uncertain systems with nonlinearities satisfying IQC. Motivated by Badreddine et al., 37 an LMI-based method is put forward to address the BMIs issue for incremental quadratic nonlinear systems, which can convert BMIs into LMIs without utilizing any equality constraints. Firstly, a non-fragile observer is constructed for incremental quadratic nonlinear systems with uncertain perturbations. A sufficient condition in terms of LMIs is put forward to render the asymptotical stability of the whole closed-loop system. Furthermore, the proposed non-fragile observer and controller gains are figured out via solving LMIs. Finally, an example on the controlled Lorenz chaotic system is given to verify the validity of the observer-based non-fragile control strategy.
Unlike the existing results in related work, the key contributions of this article can be listed as follows. Firstly, a non-fragile control design is proposed to deal with uncertain perturbations in both the observer and controller gains. Meanwhile, a non-fragile observer-based robust controller for incremental quadratic nonlinear systems is provided. Secondly, a novel LMI approach is presented to tackle the BMI problem in designing non-fragile observer-based feedback without employing any equality constraints.
Notations:
Preliminaries and problem statement
Consider the following nonlinear system with uncertain structural perturbations

where

where

It can be seen from Definition 1 that the IMM provides a characterization of the nonlinear function

holds, which is equivalent to

In this case, the corresponding IMM is

where

holds, where

where
For system (1), we construct an observer-based non-fragile robust controller
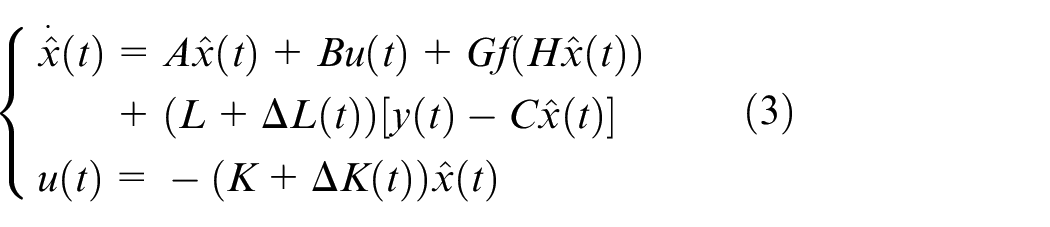
where
Assume that
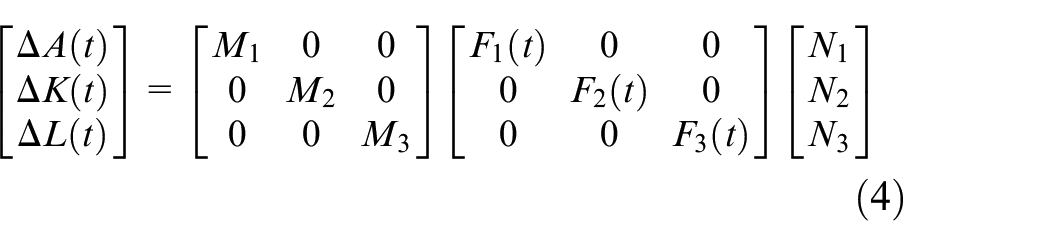
and the unknown matrices

where
Based on (1) and (3), one can rewrite the corresponding closed-loop system as
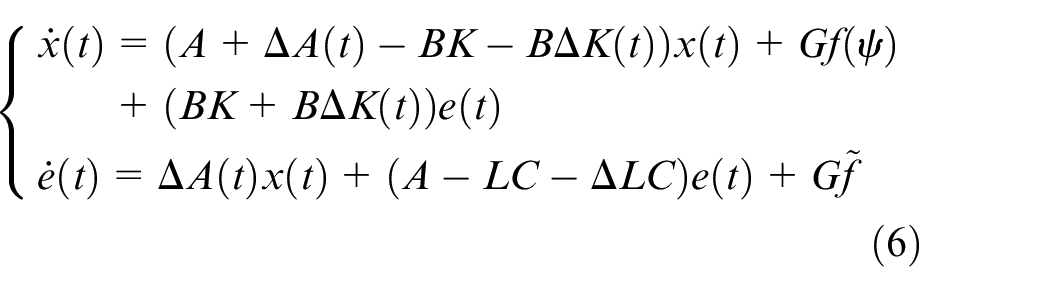
where
In what following, we attempt to select two appropriate gains

Lemma 2:
38
Let

holds if

Main results
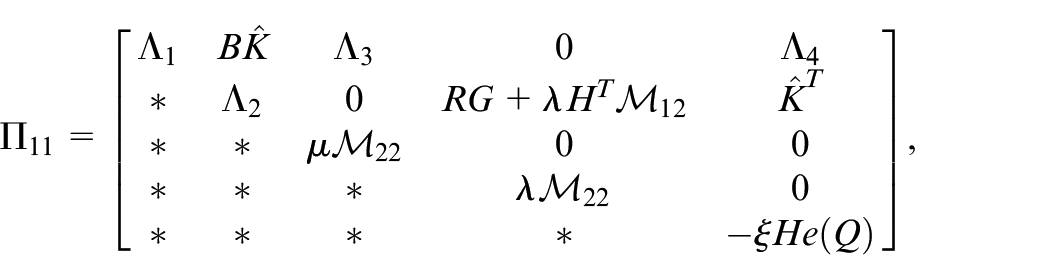
This section proposes an LMI-based condition that guaranteeing the stability of system (6), from which one can figure out the gains of (3). We have the following theorem.

where
Furthermore, the gain matrices


where
Calculating
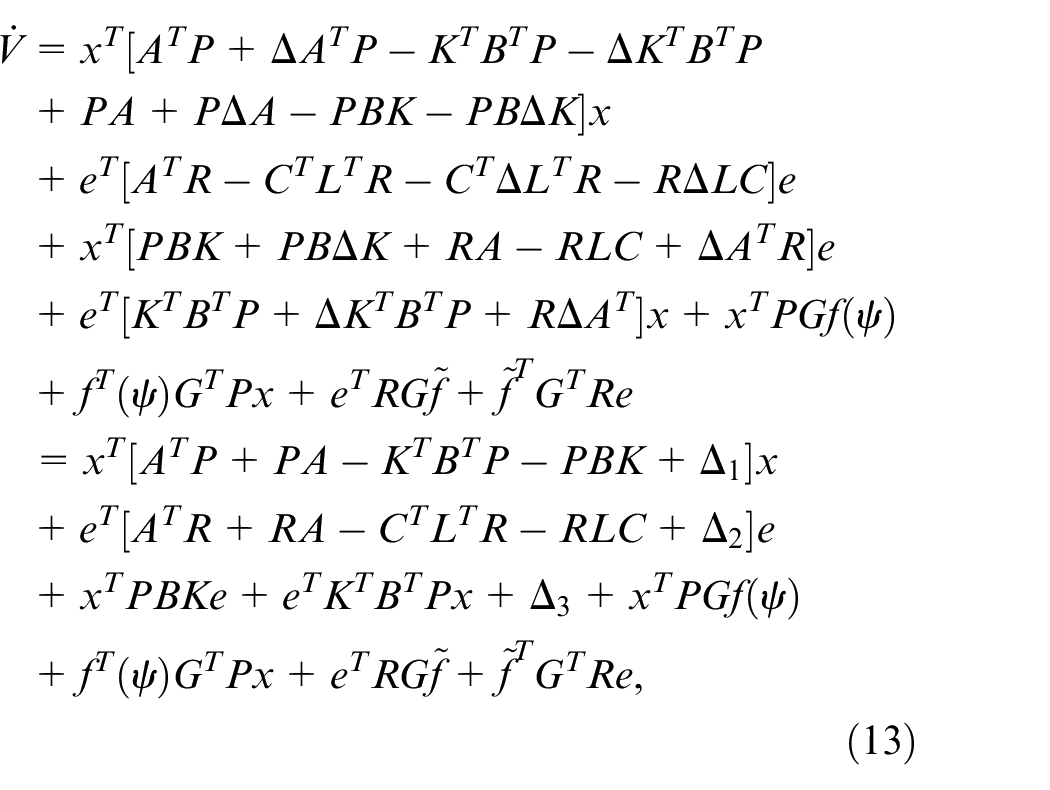
where
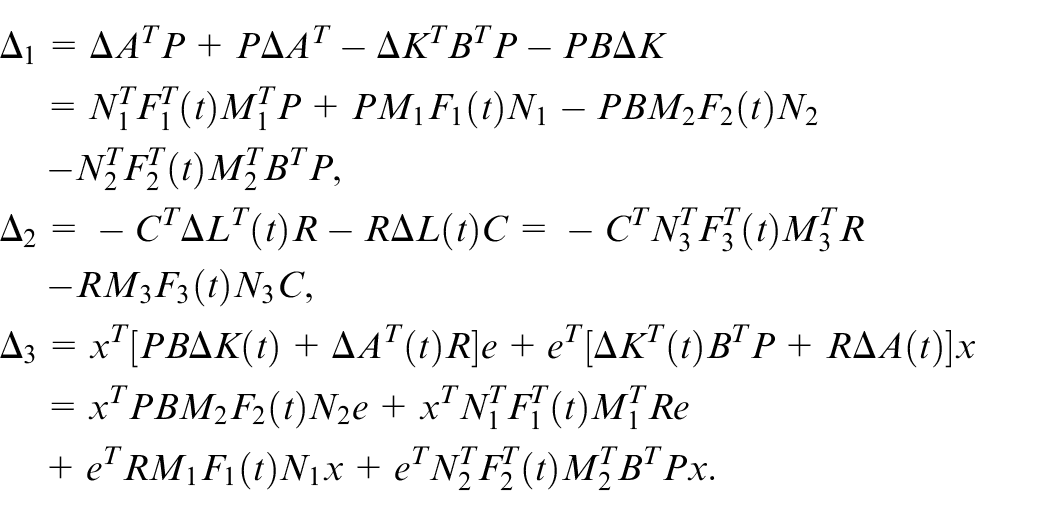
In view of (4) and (5) and applying Lemma 1, one has
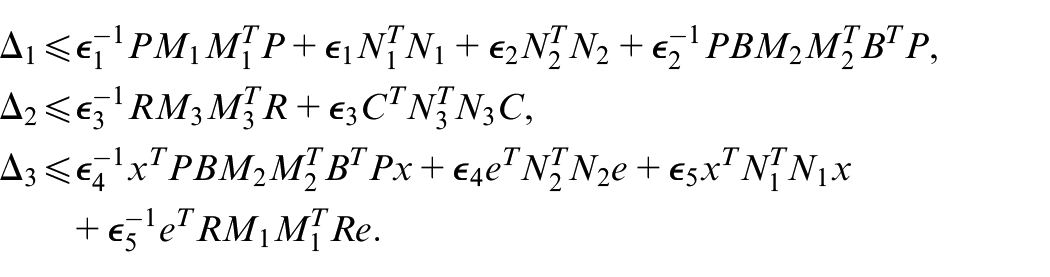
Consequently, (13) can be continued by
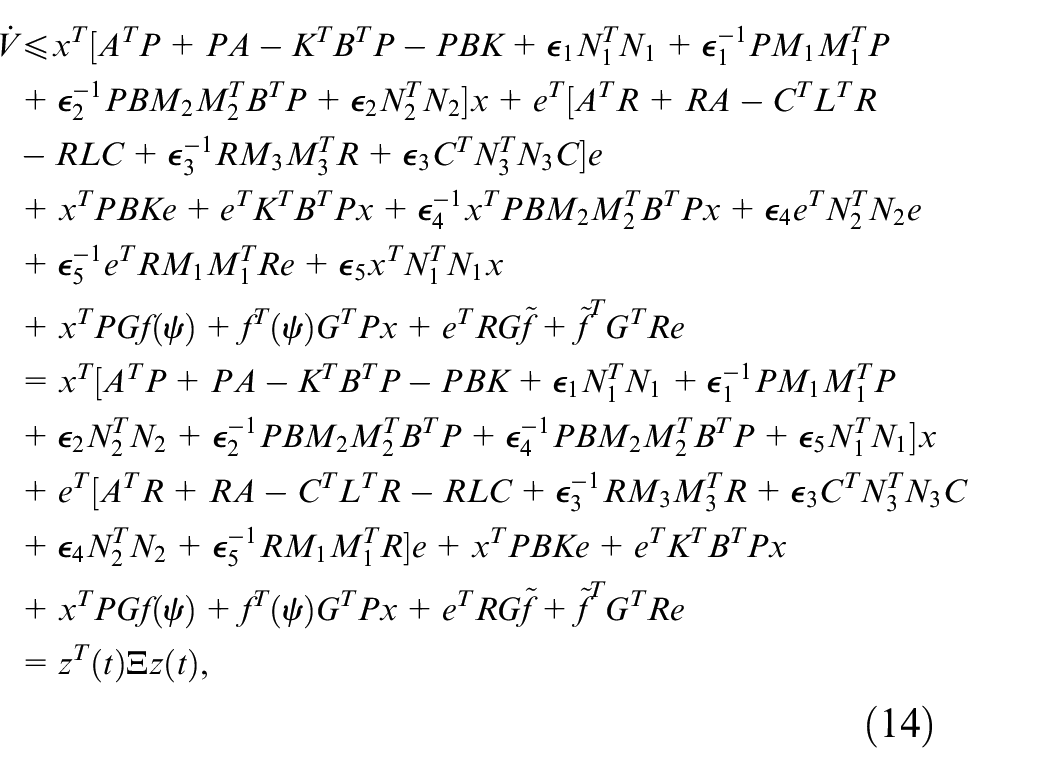
where
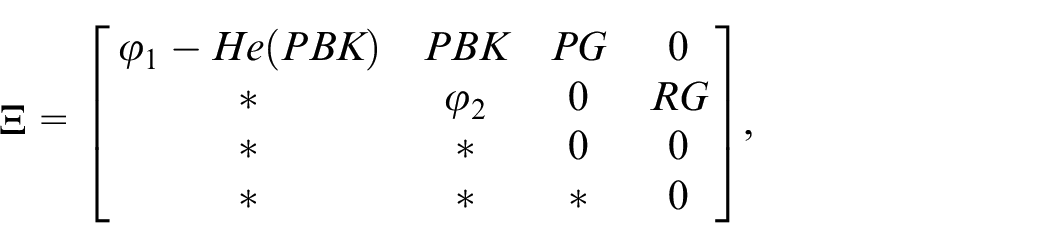
Hence, the inequality

Let

Notice that

Let
Then (16) and (17) are equivalent to
and
respectively, where
In view of (15), (18), and (19), we deduce that (15) is satisfied if

where

Notice that the inequality (20) holds if

On the other hand,
where

Thus, one can convert

Therefore, by applying Lemma 2,
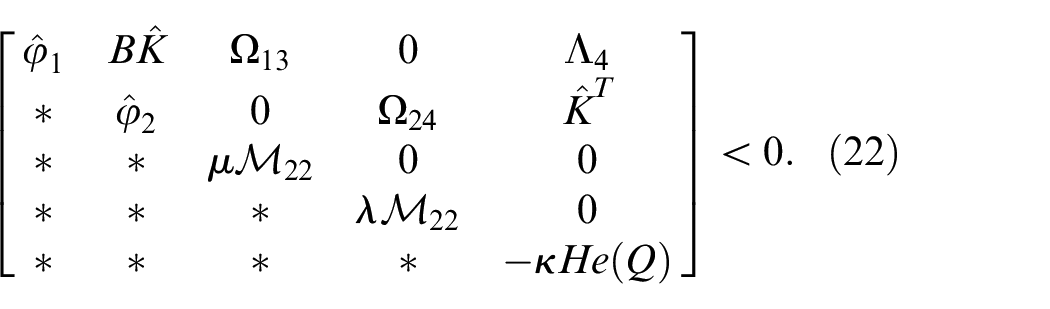
Notice that (22) can be converted into the following form

By utilizing the Schur complement lemma,
26
(10) is equivalent to (23). Therefore, system (6) is asymptotically stable if (10) is satisfied. Furthermore, the corresponding gains
Simulation study
This section gives a detailed illustration of the validity of the developed observer-based non-fragile controller via a numerical example. Consider a controlled Lorenz chaotic system borrowed from Zhao et al. 29 with the following form
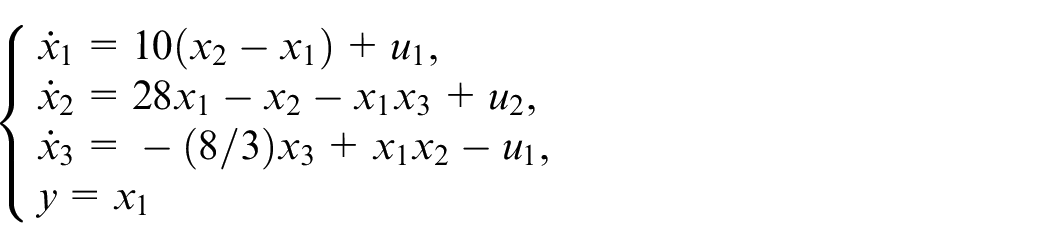
One can rewrite the above system in the state-space form of (1) with


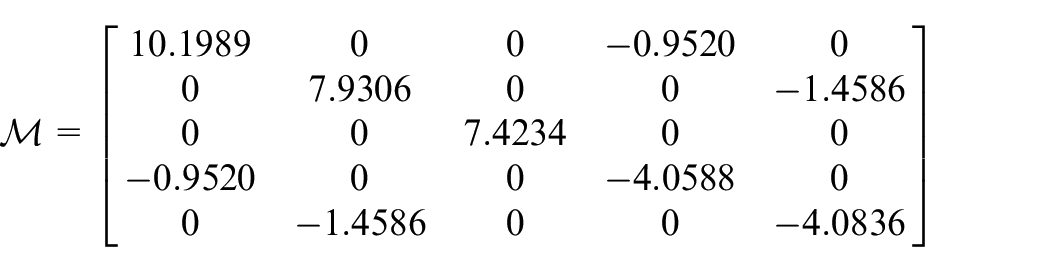
The nonlinearity
However, this nonlinearity can be characterized by IQC. In fact, from Zhao et al. 29 we know that the corresponding IMM can be derived in the following form
Moreover, assume that the uncertainties in system (1) and the controller (3) can be characterized with following parameters
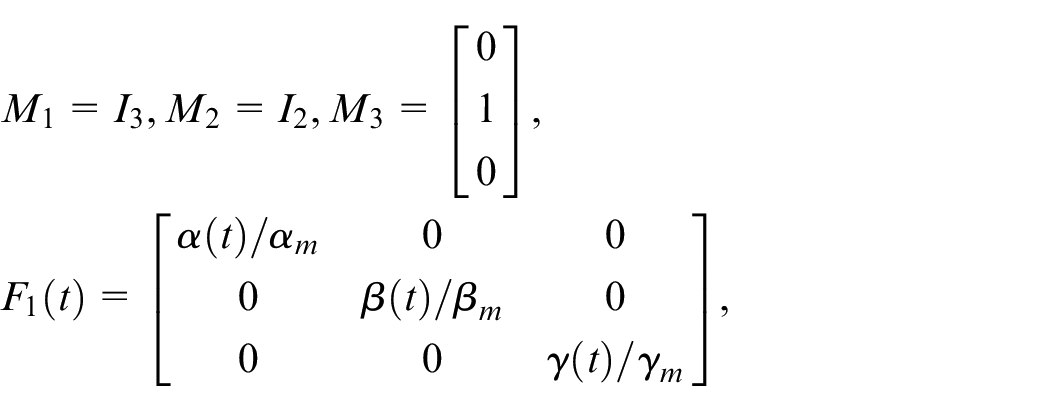


where
For these uncertainties, by solving (10) the gains of controller and observer are derived

Then, with the time-varying parameters
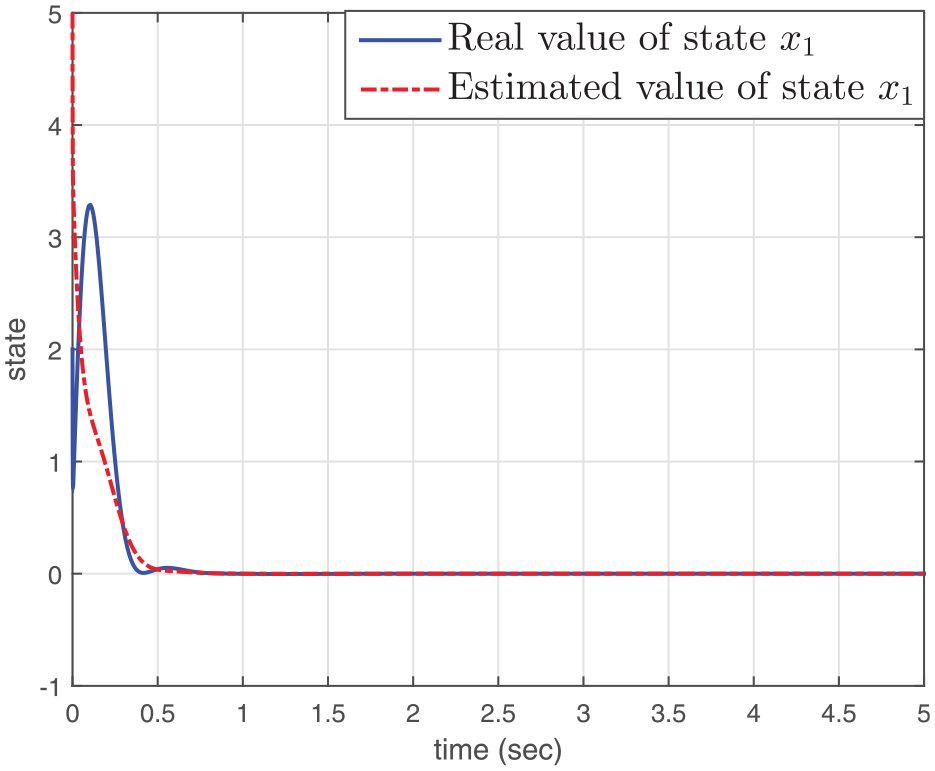
The simulation for state
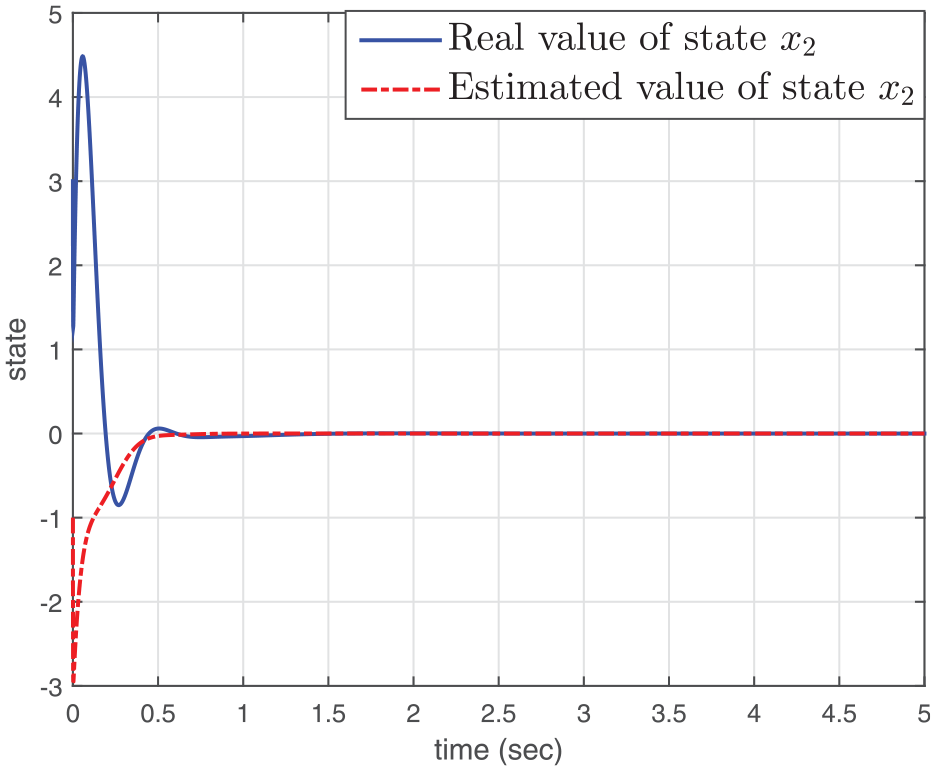
The simulation for state
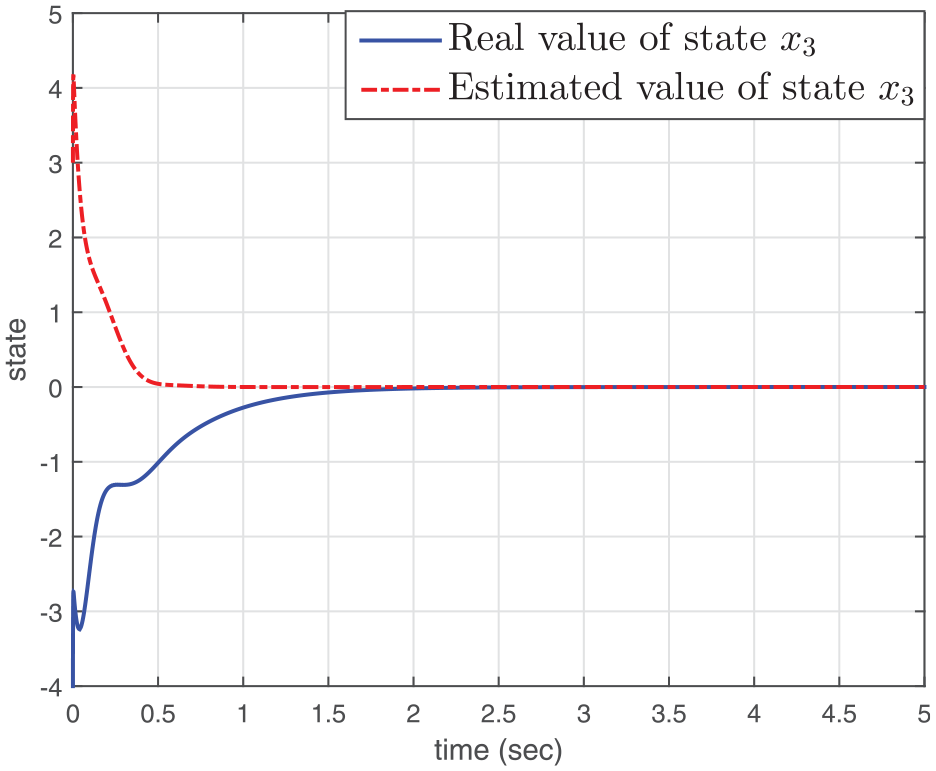
The simulation for state
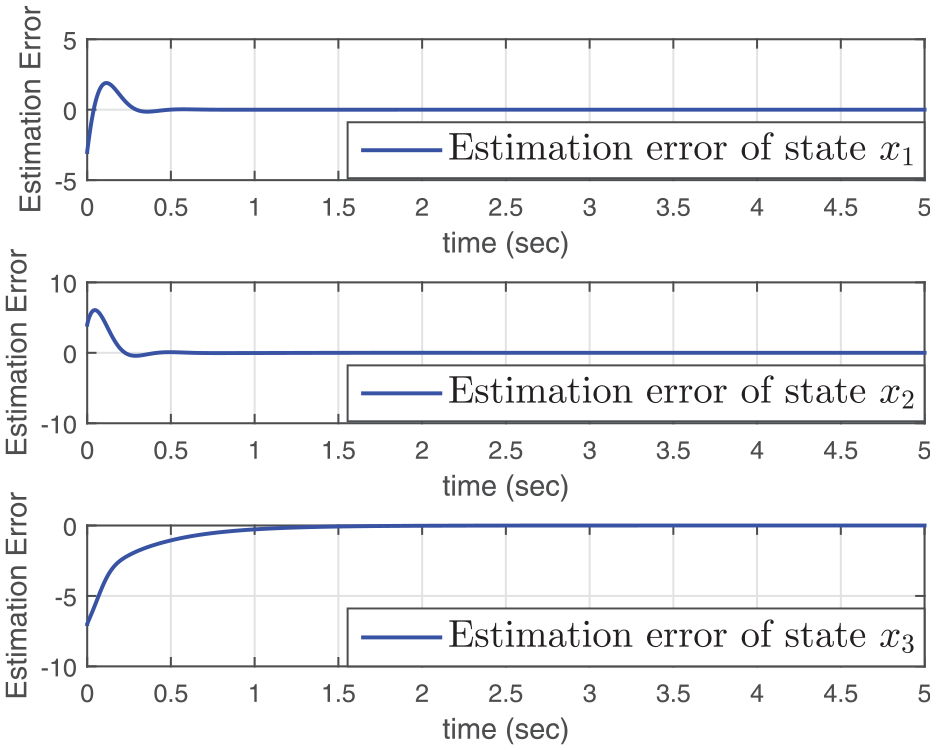
The simulation for the estimation errors.
Conclusion
This article has addressed the issue of observer-based non-fragile robust control for incremental quadratic nonlinear systems with time-varying perturbations. Firstly, a non-fragile observer is put forward to estimate the state of this uncertain system. And then a non-fragile robust control scheme is employed to deal with uncertain time-varying perturbations in both the observer and the controller gains. Resorting to some useful matrix inequalities, we convert the BMIs involved in the Lyapunov stability analysis into LMIs without utilizing any equality constraints. Furthermore, an LMI-based sufficient condition is provided to guarantee the asymptotical stability of the whole closed-loop system. The validity of the proposed observer-based non-fragile robust control design is demonstrated through a simulation example.
Footnotes
Ethical Considerations
This work did not involved humans and animals. Ethics approval was not required for this research
Informed consent/patient consent
Not applicable. This work did not involved humans and animals.
Author contributions
All authors contributed to this work from different aspects. J.H., X.Z., W.Z., and Z.H. contributed to conceptualization, methodology, modeling, validation, and results analysis. J.H. and X.Z. contributed to the original draft of this manuscript. All authors commented on previous versions of this manuscript, and then read and approved its current version.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under Grant No. 62003207 and the Key Research Project of Shanghai Science and Technology Innovation Vocational College under Grant No. KC2025003.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
No data sets were generated or analyzed during this study.
Trial registration number/date
Not applicable. This work did not involved humans and animals.