
Abstract
This article presents the dynamic consensus control framework for linear multi-agent systems (MAS) using Distributed Model Predictive Control (DMPC) as the primary strategy to achieve both static and dynamic consensus in vehicle platoons. The proposed approach incorporates state and control constraints to ensure feasible and safe operations within desired limits, making it particularly suitable for practical applications in coordinated vehicle control. By employing MPC, the system anticipates future states, enabling predictive adjustments that enhance overall system stability and consensus accuracy. Theoretical analysis establishes the conditions under which consensus is achieved, while MATLAB simulations validate the effectiveness of the control scheme in managing the desired platoon behaviors under various dynamic scenarios. The results demonstrate that the MPC-based approach successfully achieves consensus among agents, providing robust performance despite the inherent system constraints. Comparison of the characteristics with existing control schemes demonstrate the feasibility of the proposed DMPC design, while maintaining comparable performance.
Introduction
Modern research and observations in the field of control systems have led to the widespread emergence of multiple agents in controlling a system rather than relying on a single complicated system. Multi agent systems (MAS) minimize computing complexity by coordinating multiple tasks, making them popular in recent control approaches. These multiple entities find its roots from nature itself, based on the detailed study on the local interactions among various biological species in nature. 1 Various kinds of control techniques can synchronize asynchronous parallel actions between agents. It uses both centralized and distributive control, with the latter being more resilient and efficient when governing multiple entities. MAS possesses many cooperative applications, including consensus, flocking, formation, and rendezvous. This work is primarily concerned with the consensus control of MAS, in which each entity reaches an ultimate decision on a common goal.2,3
Autonomous vehicles are a prime example of MAS and are integral to intelligent transportation. Among the applications and control of automated vehicles, platooning has become a game changer. The increasing trends in research makes platooning of vehicles a more significant area of focus, which is considered in this work. 4 Platooning entails the meticulous Unmanned Ground Vehicles (UGVs) that follow one another at exact intervals to enhance fuel efficiency and safety. The literature5,6 has evaluated and illustrated platooning’s benefits using adaptive cruise control on four Infiniti M56s vehicles. MAS literature employs static and dynamic consensus control for vehicle platooning to maintain a united platoon while each vehicle operates independently and maintains consistent spacing and velocities.7–9
In the context of consensus, state feedback controllers are often applied, using real-time vehicle state information like location and velocity to calculate control inputs. 10 While this control algorithm provides a simple solution to vehicle platooning, it has restrictions including, rigidity in dynamic scenarios, rendering it unsuitable for dynamic circumstances in which system parameters vary over time. 11 Moreover, it is unable to predict future states as it reacts solely to present system states rather than forecasting future vehicle behavior or environmental conditions. This leads to a logical evolution toward dynamic consensus control, which may overcome these constraints by introducing predictive capabilities.12,13 Unlike static consensus, dynamic consensus is more challenging and involves agents coordinating with different dynamics over time. The work in Ferrari-Trecate et al. 14 underlines how control algorithms must include real-time changes to maintain platoon. Research works regarding control methods like PID, sliding mode control etc are profoundly used but they fail in handling constraints and also do not incorporate future state predictions and rely on real-time data.10,15–17 In this setting, MPC evolved as a superior control strategy since MPC-based dynamic consensus maintains formation and adapts to time-varying conditions better. 18 Vehicle platooning requires this trait to account for sudden topographical obstacles, and vehicle dynamics changes. MPC ensures platoon dynamic adaptation by optimizing control inputs at each time step.13,19,20
Both traditional and existing MPC vehicle platooning research focus on longitudinal dynamics, specifically speed and inter-vehicle distance. 21 At conditions like lane changes or curves, lateral dynamics like lane-keeping and vehicle orientation are essential for safe platooning. 22 By controlling lateral motion, platooning systems can maintain safe distances both laterally and longitudinally, reducing the risk of side collisions. 23 MPC controls lateral vehicle dynamics better than PID or state feedback controllers, as it can handle complex, multi-dimensional control problems. 24 Most research addresses longitudinal and lateral dynamics separately, leading to poor control decisions, especially when vehicles must perform complex maneuvers together. 25 Numerous works exists on vehicle queue control focusing on position, speed control and braking, by considering longitudinal vehicle dynamics.16,26 Research is currently underway to integrate longitudinal and lateral dynamics 27 ; however, the computational burden associated with the utilization of complex control algorithms and distinct controllers hinders these endeavors. Therefore, this article orient toward modeling lateral and yaw behavior which is not a frequently explored topic in the field of platooning. Including yaw dynamics improves vehicle cornering and turning simulation. Without yaw dynamics, the model would only examine lateral motion, although the vehicle spins while turning. The yaw angle and yaw rate describe the vehicle’s orientation relative to its initial direction and rotating speed, respectively. Understanding the vehicle’s steering response requires both. The vehicle’s yaw behavior is crucial for emergency maneuvers such as rapid lane changes and obstacle avoidance. A combined lateral and yaw model lets the vehicle safely operate without excessive yaw rates that could cause loss of control during skids or sudden turns. Hence, this study focuses on both static and dynamic consensus control of distributed MAS aiming at UGV platooning using state feedback and distributed MPC respectively (DMPC).
The work in Zhu and Wang 28 examines leader-following consensus in MAS utilizing an event-based impulsive control approach. While it reduces communication and control efforts by updating states according to triggering events, sparse events may lead to delayed responses, hence impacting performance in rapid dynamics. Furthermore, the study offers minimal attention to real-world constraints, particularly in decentralized systems characterized by intricate communication topologies, whereas the proposed approach prioritizes real-world constraints within a higher-order distributed system that facilitates proactive modifications rather than reactive updates. A similar study on the leader-following technique, which elaborates on the consensus-oriented Impulsive Control Method for vehicle platoons, is presented in Wu et al. 29 This approach reduces communication overhead by transmitting and receiving information exclusively at discrete impulse intervals; nevertheless, it neglects to consider the vehicle’s orientation in its mathematical model. Optimization is confined to local state stabilization and consensus, whereas DMPC-based control seeks global optimization of control objectives among agents. A comprehensive review of multi-vehicle consensus is provided by Chu et al., 30 which concentrates on addressing problems related to vehicle platooning amidst network uncertainties, including communication delays, packet loss, and switching topologies. Though it discusses theoretical models, the article fails to elucidate the application of optimization-based methods like DMPC, which is addressed in the proposed work. Moreover, it does not delve into the pros and cons of computational complexity as well as robust control schemes which is more crucial in addressing the consensus problem in multi vehicle systems.
Most of the current literature on MAS primarily focuses on single or double-integrator dynamics, therefore there is a need for additional research into consensus control of distributed MAS of higher order. Moreover, the benchmark problem of platooning is still an emerging sector that needs greater investigations, especially using a distributed consensus algorithm rather than the prevalent leader following method. To the best of the authors’ knowledge, the application of distributed MPC for vehicle dynamics that models lateral and yaw behavior to attain dynamic consensus is limited. The proposed algorithm reduces fuel consumption by minimizing the torque applied on the wheels at each interval. Imposing constraints on the system’s states and inputs improves its performance while accomplishing vehicle platooning. The major contributions of this work are outlined below.
The state space model is derived using the dynamic linear bicycle model of a vehicle 31
The states are controlled using a state feedback controller which helps in achieving consensus control of platoons
An initial state feedback controller is extended with distributed model predictive control to effectively handle input and state constraints
Static and dynamic consensus is achieved for the vehicle platoon using the developed controllers.
The paper is organized as follows. Section 2 details the graph preliminaries and problem formulation. The vehicle dynamics is described in section 3. The controller design is included in section 4. Section 5 deals with the validation of proposed control strategies through simulations. Conclusions and future scope are included in section 6.
Preliminaries and problem formulation
The mathematical notations used in this paper can be represented as: ℜ denotes the set of real numbers,
Graph theory
The communication topology of the vehicle platoon is represented using a fixed undirected graph
Definition
Consider N number of linear, homogeneous, continuous time agents in a MAS with


where

where

where

and is said to achieve dynamic consensus if:

The constant
Mathematical model of the vehicle
A linear bicycle model of four-wheeled autonomous vehicle is developed considering the lateral and yaw vehicle dynamics. The vehicle under motion is considered with two degrees of freedom. The four states being lateral position (y), velocity (




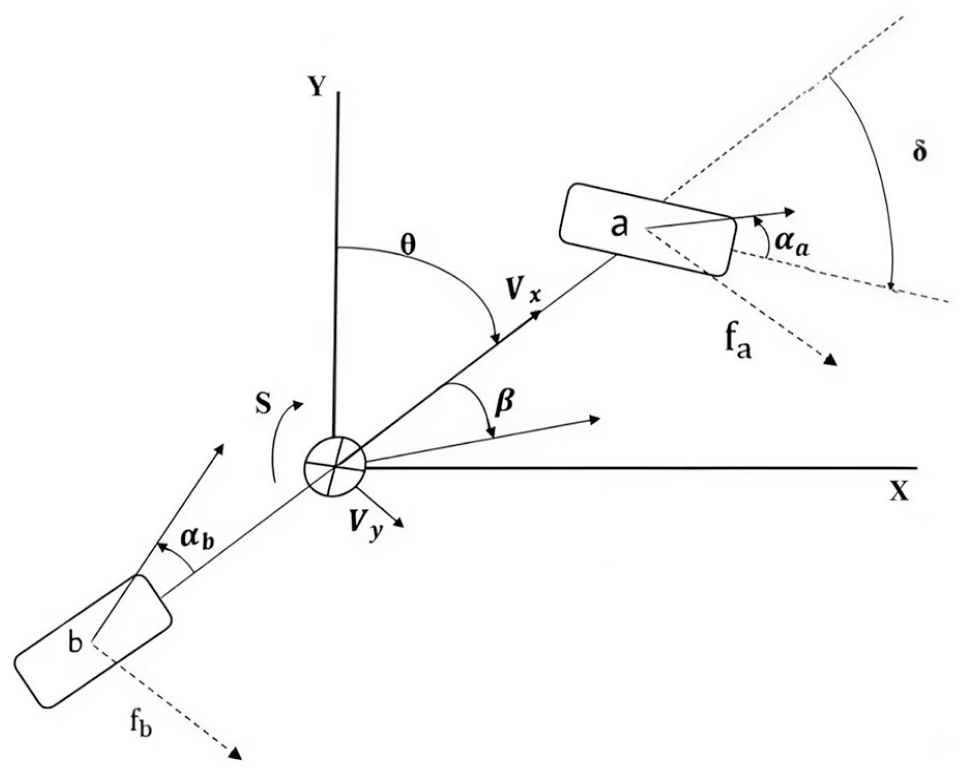
Vehicle dynamics.
The tire forces are derived from the linear tire model:


where


The velocity components of front tire in the direction of wheel coordinates


Using co-ordinate transformation of velocity components in X and Y direction of front tire to the velocity components in


Assuming slip angle approximation as tan


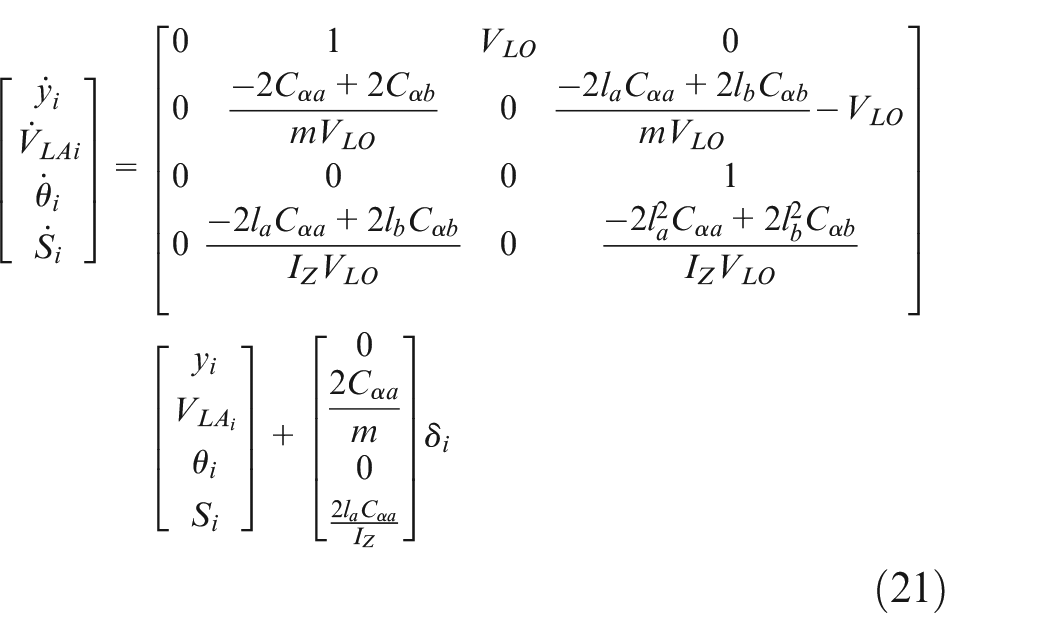
From equations (11) to (20), the state space representation of the mathematical model for the
Controller design
State feedback control
The state feedback control approach is implemented by computing the state feedback gain matrix. The control law for

where
Distributed model predictive controller design
This section presents the dynamic consensus of vehicle platoon implemented using the DMPC strategy. The continuous time state space model in (1) and (2) is discretized using the zero order hold, resulting in the discrete system dynamics represented as:



The augmented state vector is chosen as:



Equations (27) and (28) form the augmented state space model, where the states

where

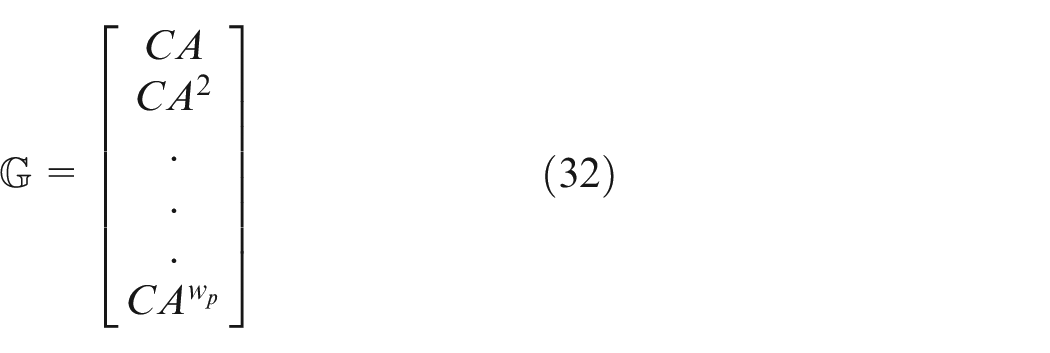
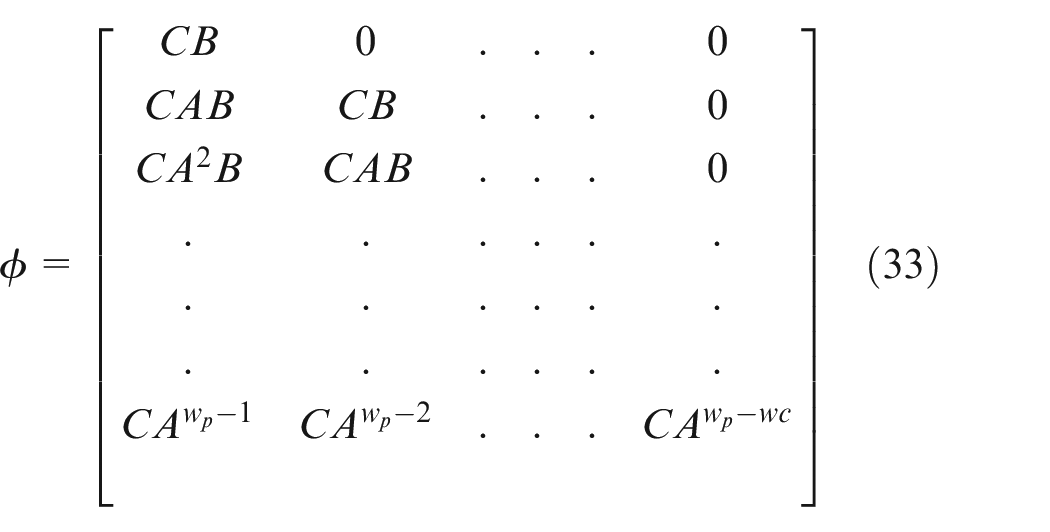
The output vector is predicted from equation (28) and is expressed in compact form as:

where
For a given set point

where

This yields the optimal control input as:

The control law in (36) drives the agents toward consensus.
Simulations
Extensive analysis is carried out on the proposed control strategies through simulations of the platoon system. Figure 2 shows the network topology of five vehicles traveling along a single lane. The desired inter vehicle distance is selected as

Network topology of vehicle platoon.
Static consensus
Static consensus is achieved by applying the control law for the system in (1) with matrices
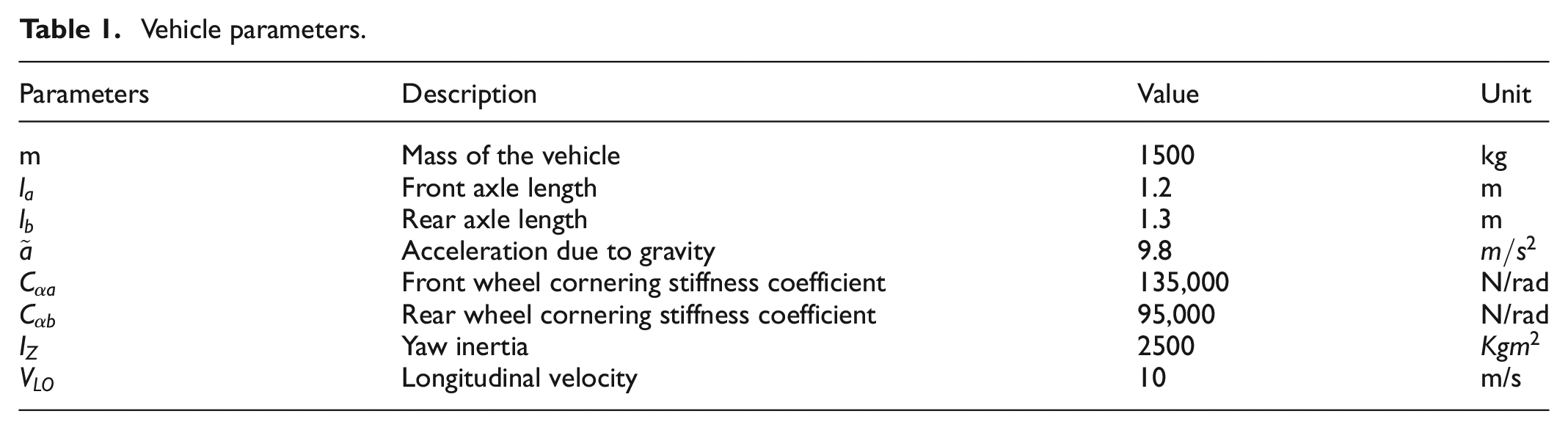
Vehicle parameters.
The value of state feedback gain matrix “K” is chosen as: K =
The initial states of each agent are randomly selected as: Longitudinal position of vehicle platoons using DMPC
State feedback control enables vehicle systems to achieve static consensus, as demonstrated in the simulation results.
As indicated in Figure 3, the steering angle, with values ranging from −50° to 30°, is the control input to the MAS. Figure 4 shows the velocity trajectory of the vehicles establishing static consensus and Figure 5 shows the agent’s yaw angle or heading angle with respect to the reference coordinates. The yaw rate of the agents converging to zero is shown in Figure 6, where the yaw rate varies from −25°/s to +20°/s for individual agents.
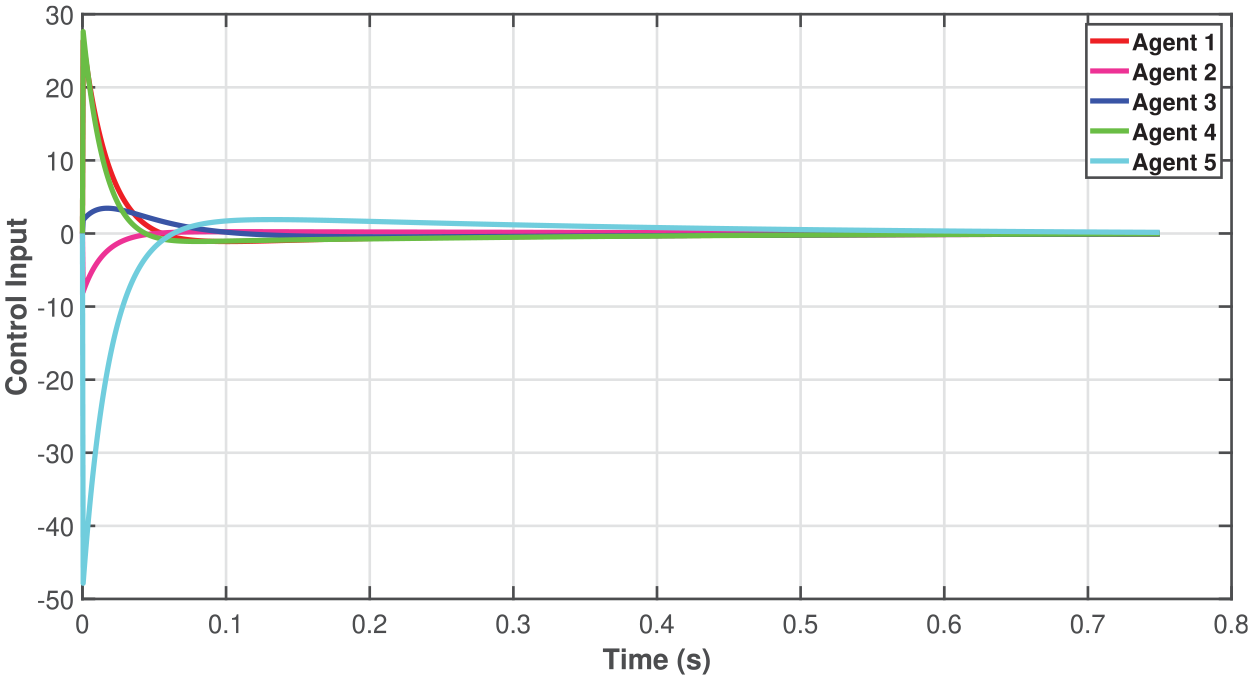
Control input of the five agents on static consensus.
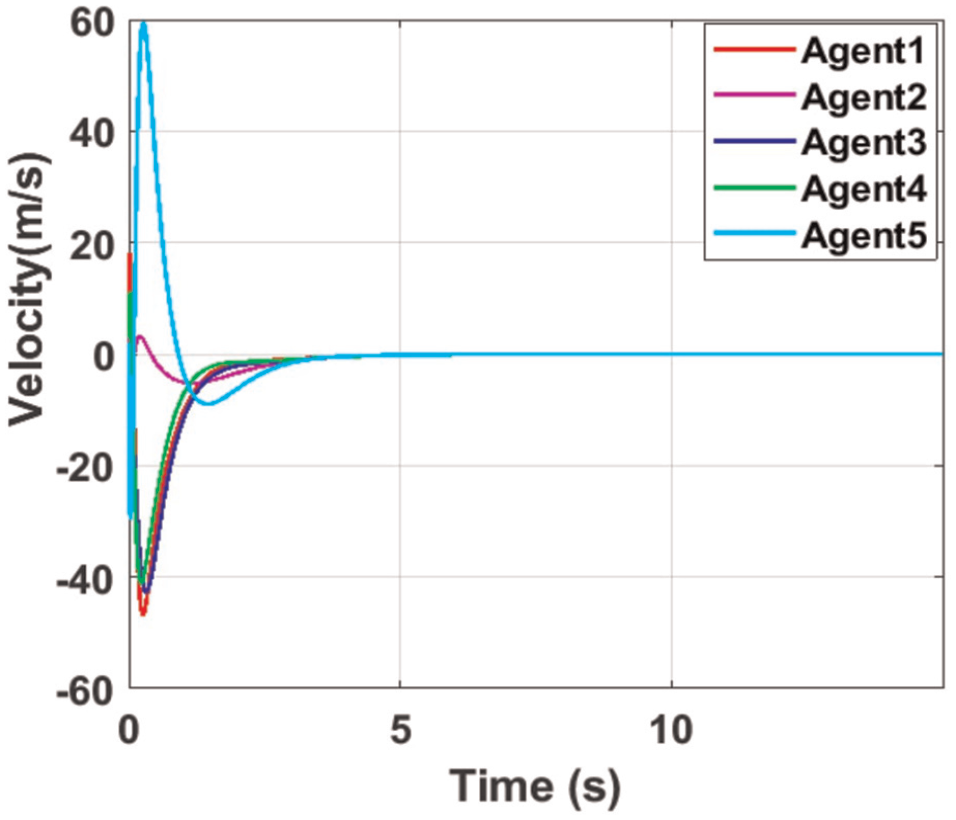
Velocity of the five agents on static consensus.
Yaw angle of the five agents on static consensus.
Yaw rate of the five agents on static consensus.
Dynamic consensus
The DMPC approach facilitates the achievement of both static and dynamic consensus in the MAS while also considering constraints. This section illustrates the dynamic consensus of the vehicle platoon under two different sets of initial conditions.
DMPC without constraints
Considering the vehicle dynamics in (21), the convergence analysis of the five vehicles are initially done without implementing any constraints and the convergence rate and final consensus point is noted for further analysis on constrained optimization. The initial conditions used in DMPC approach are same as that used in the state feedback control.
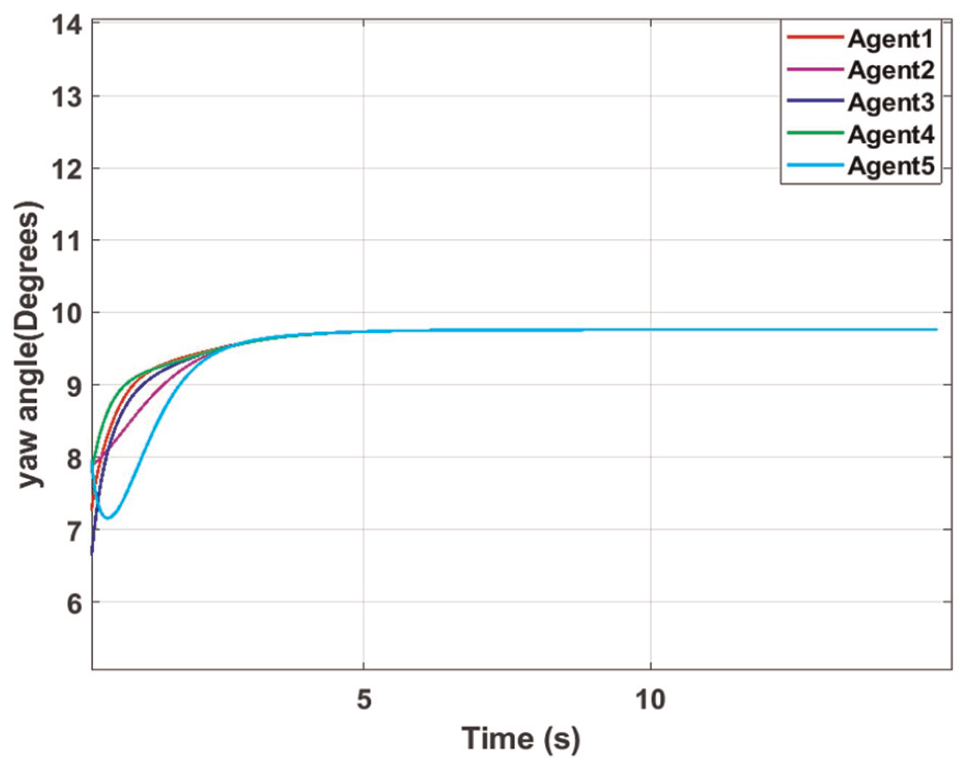
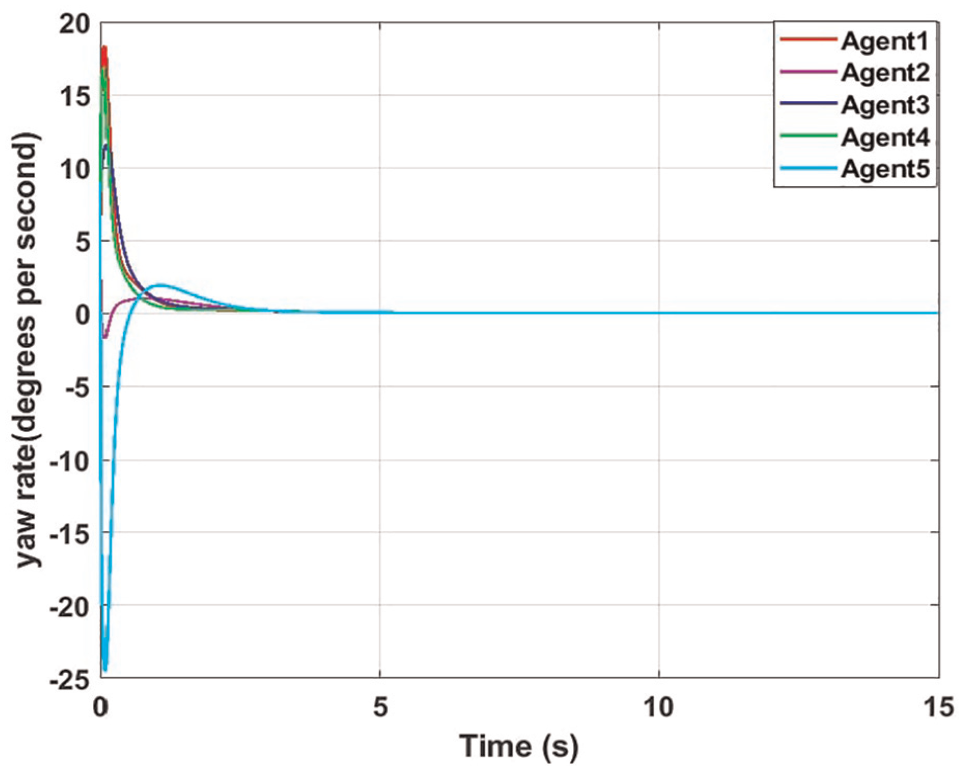
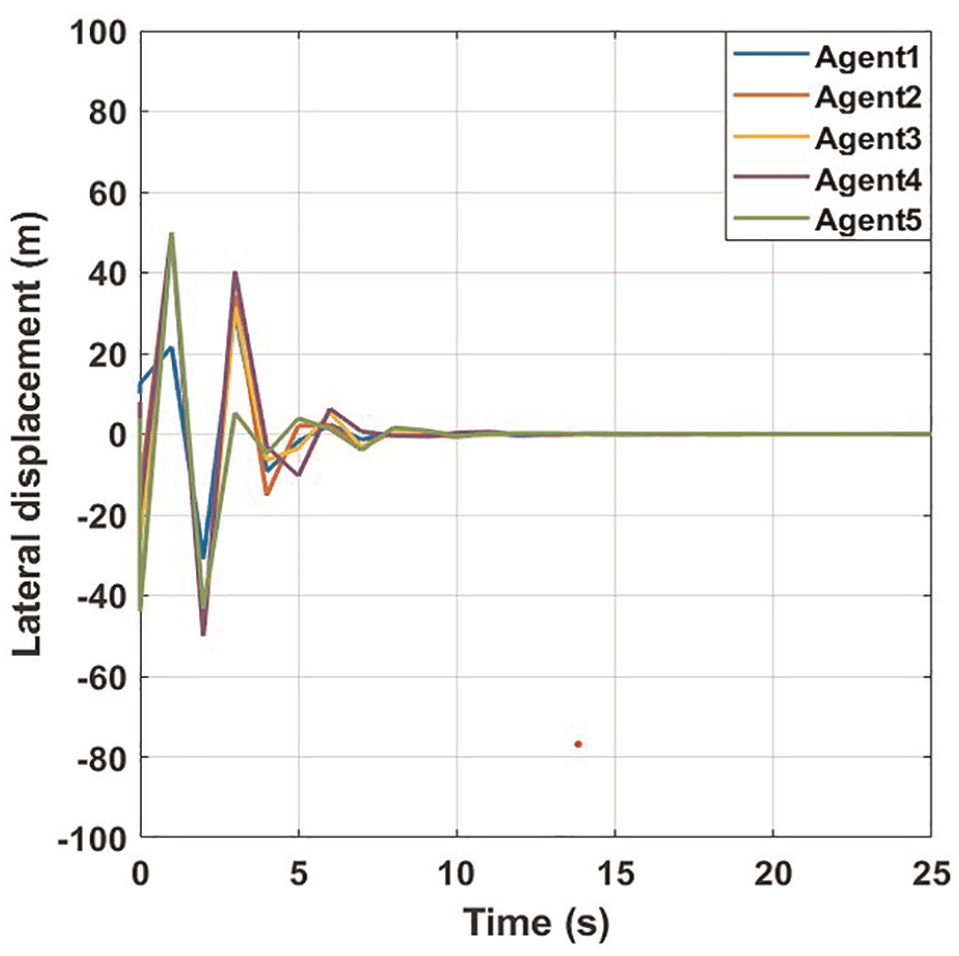
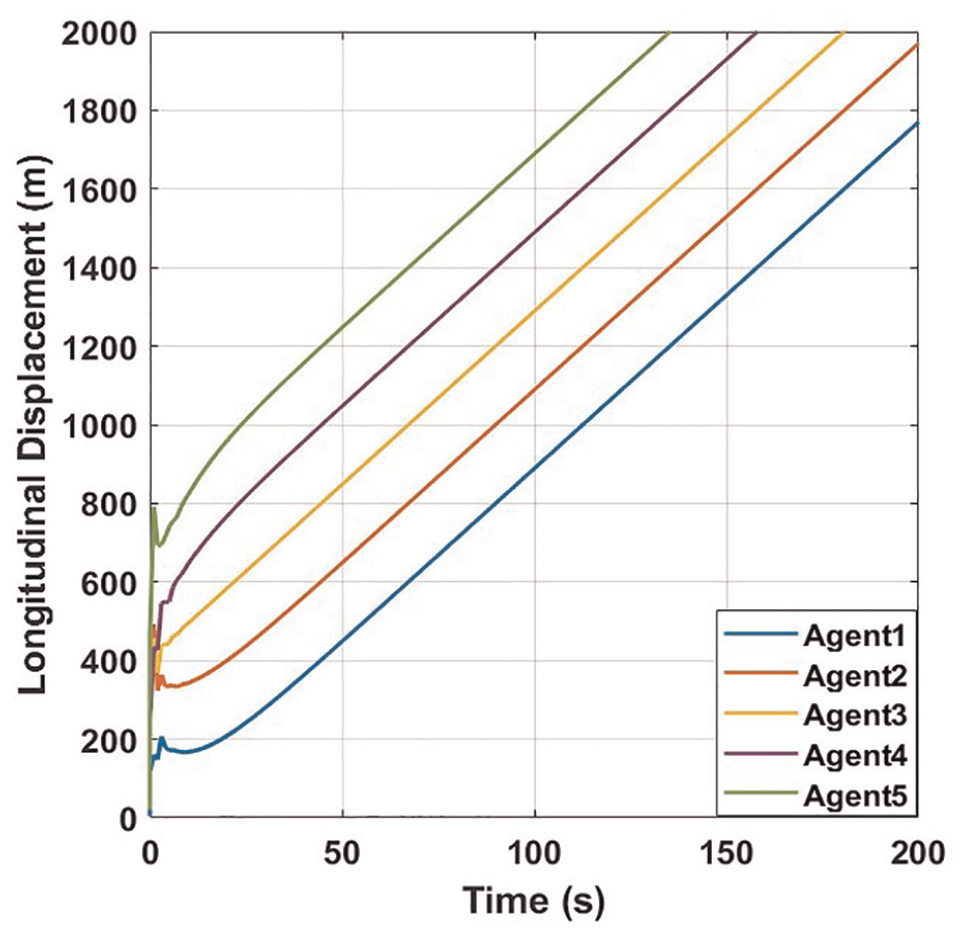
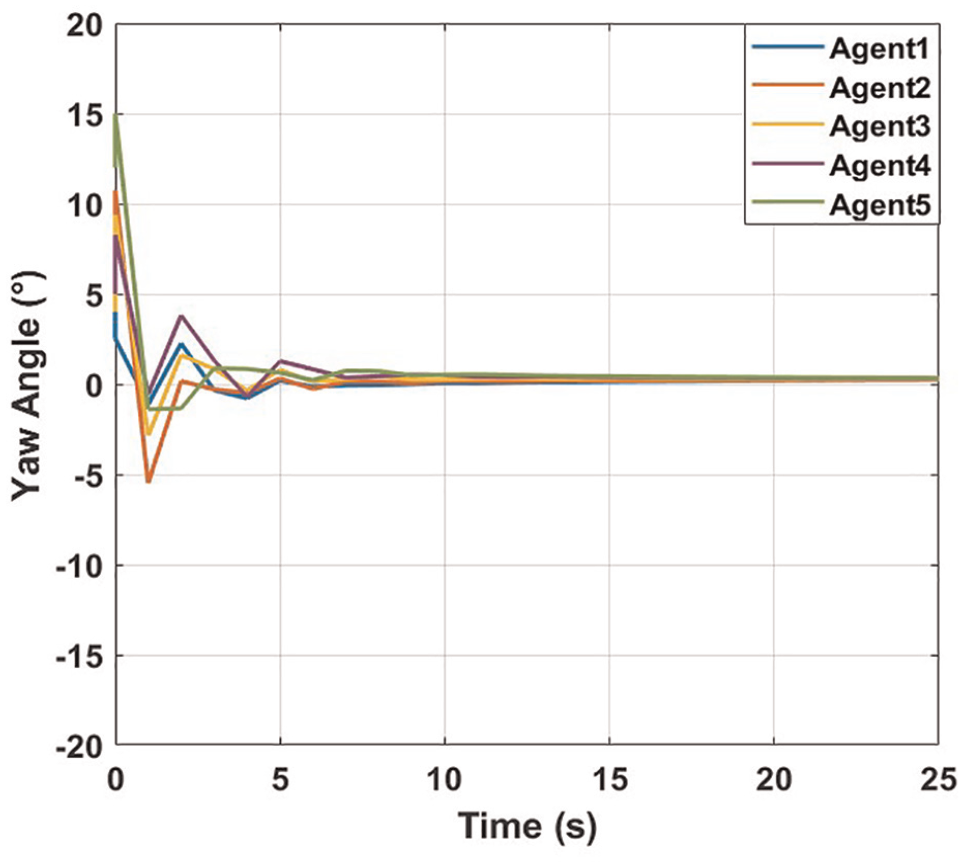
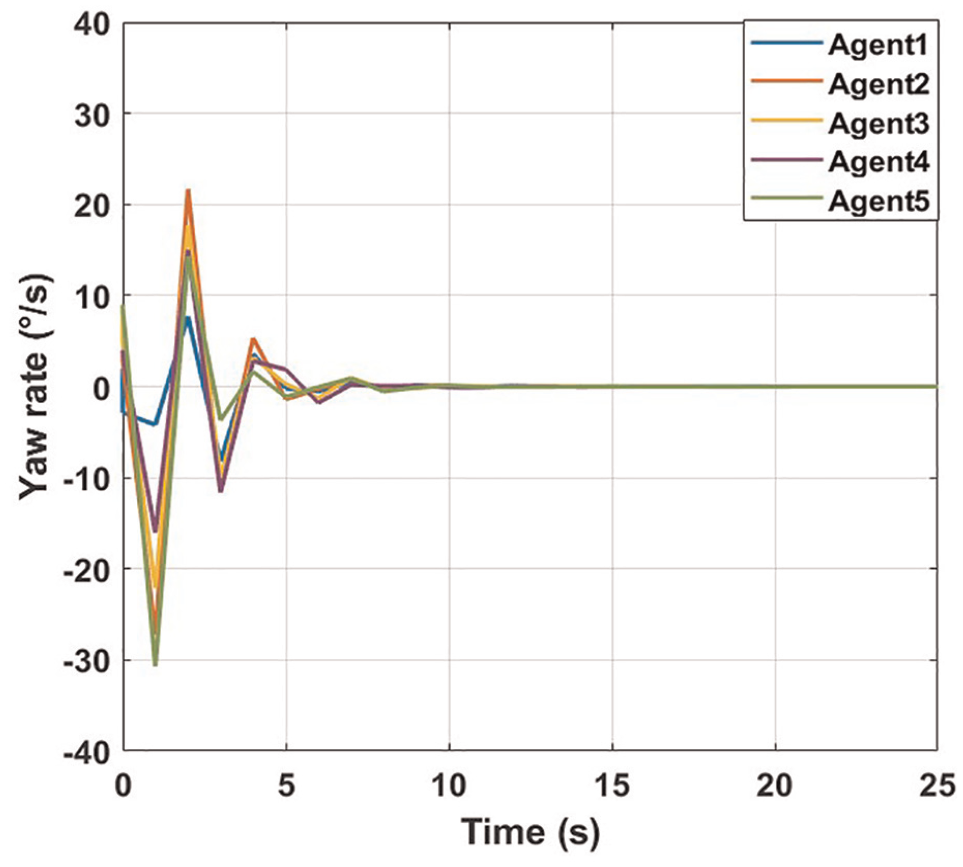
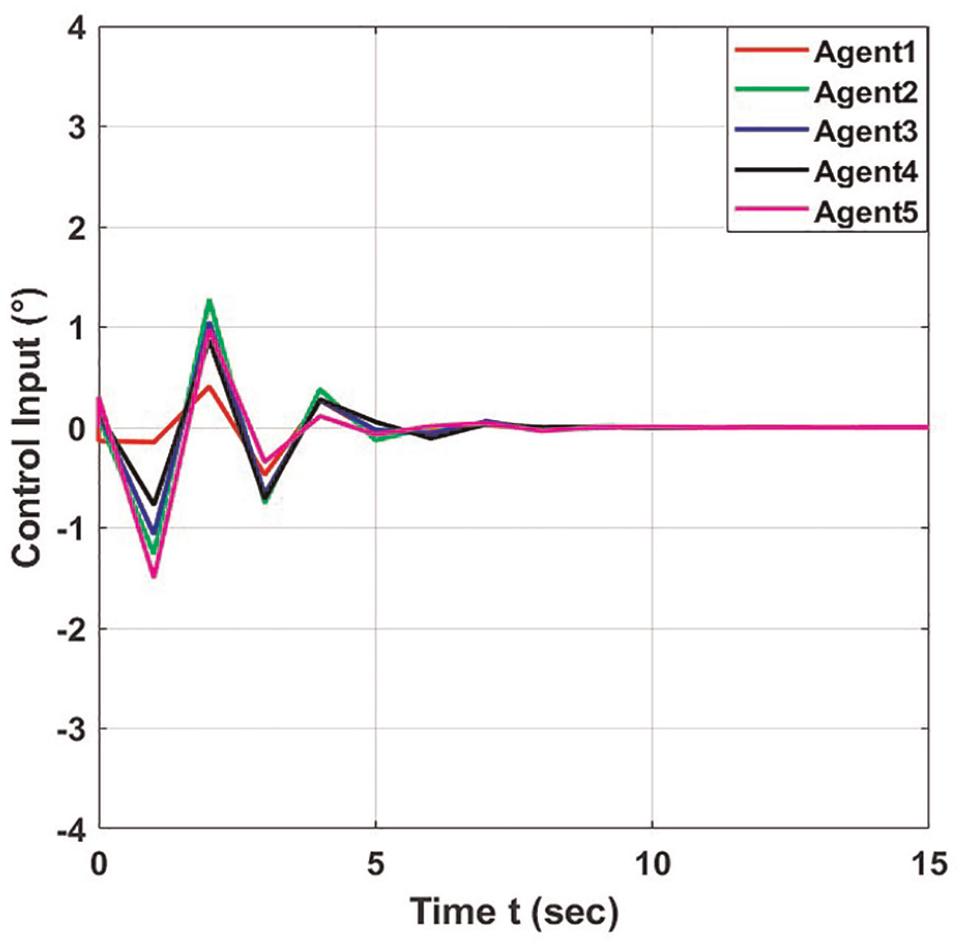
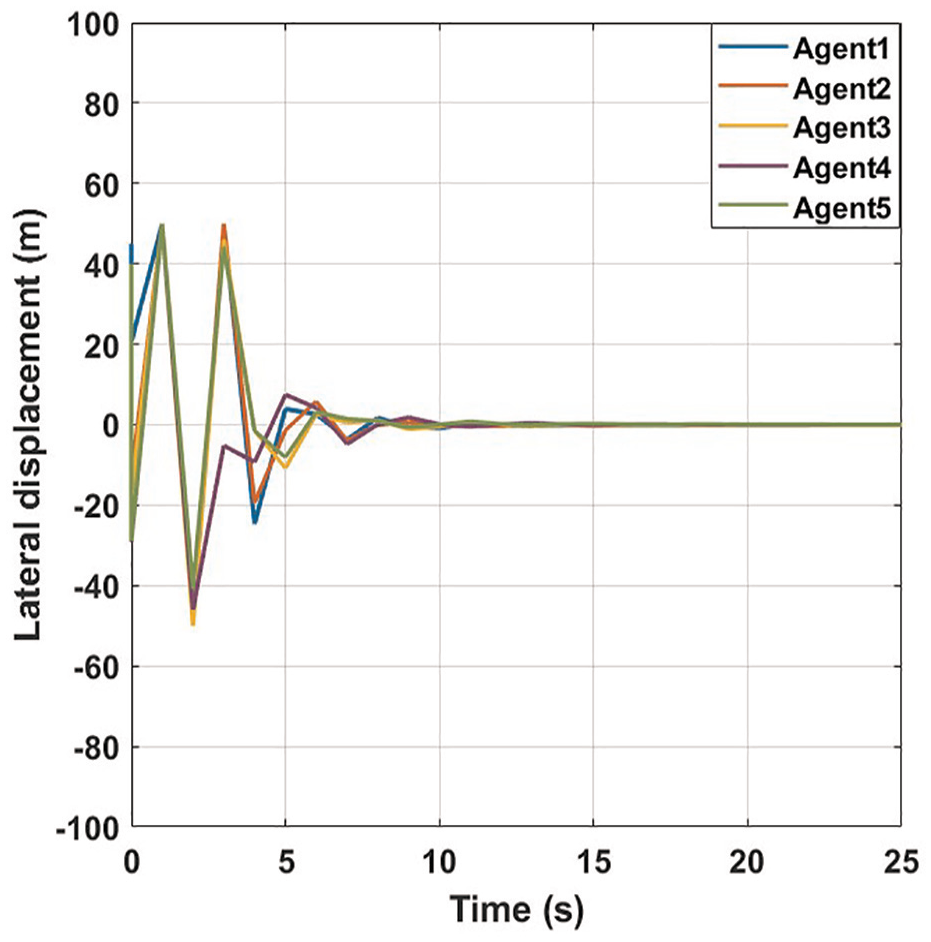
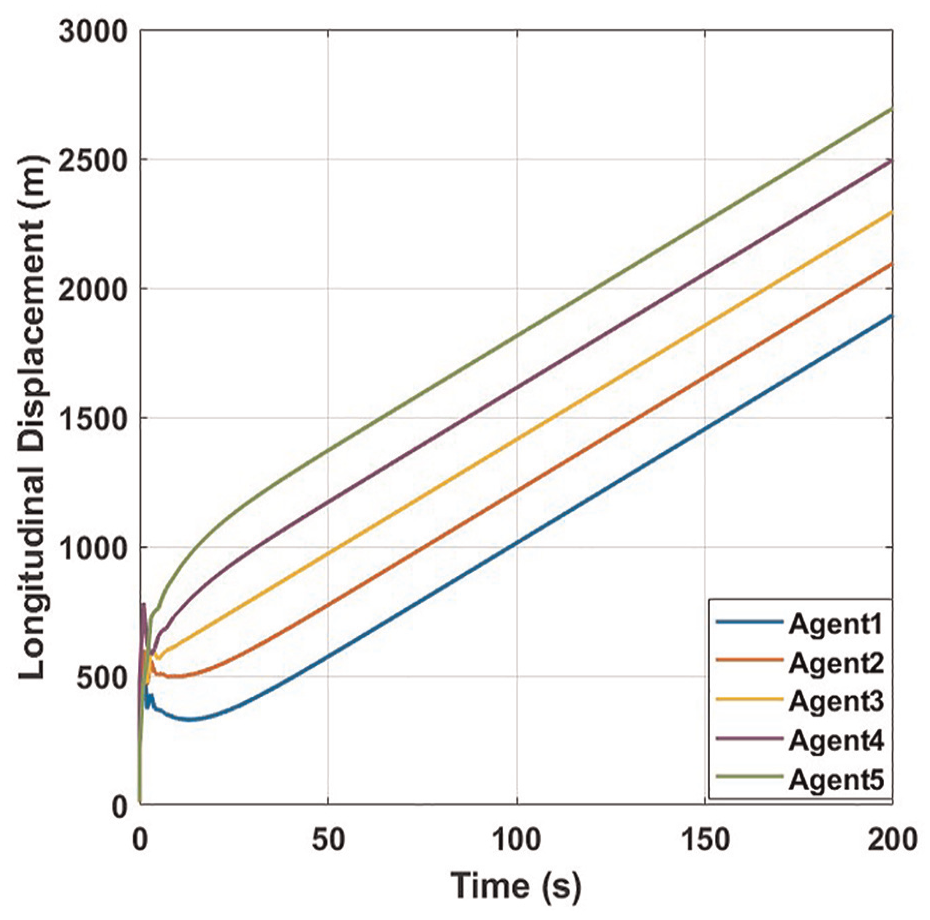
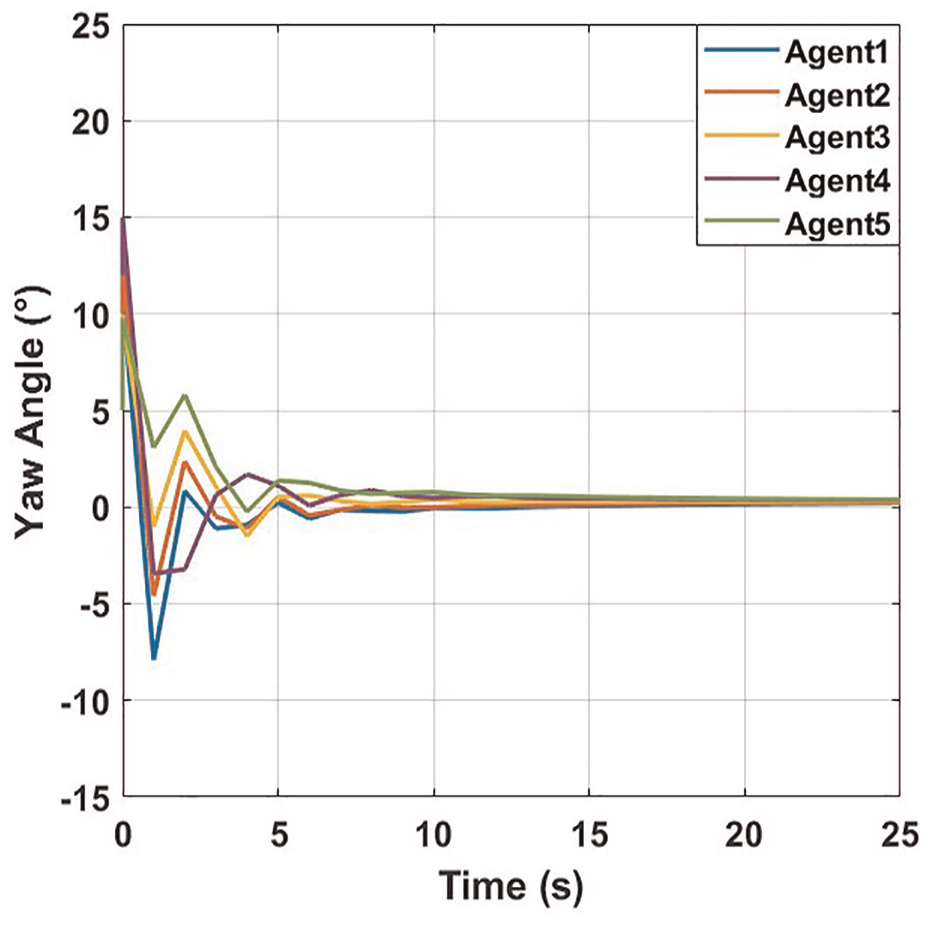
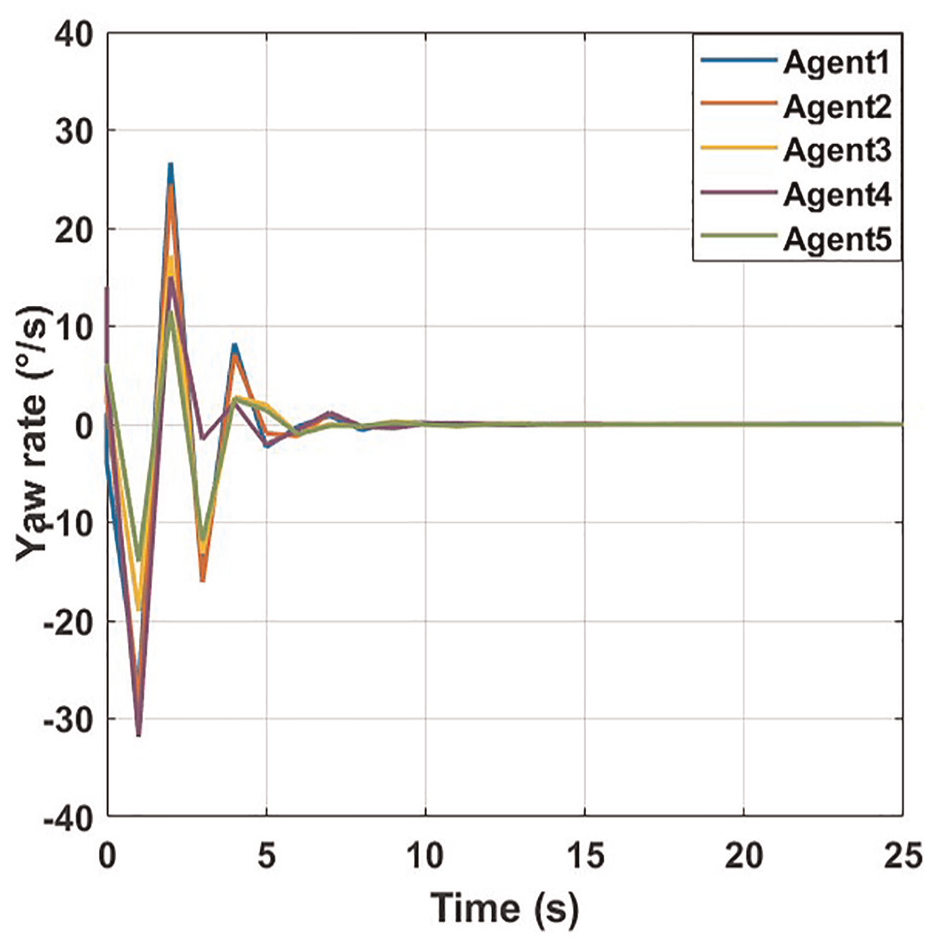
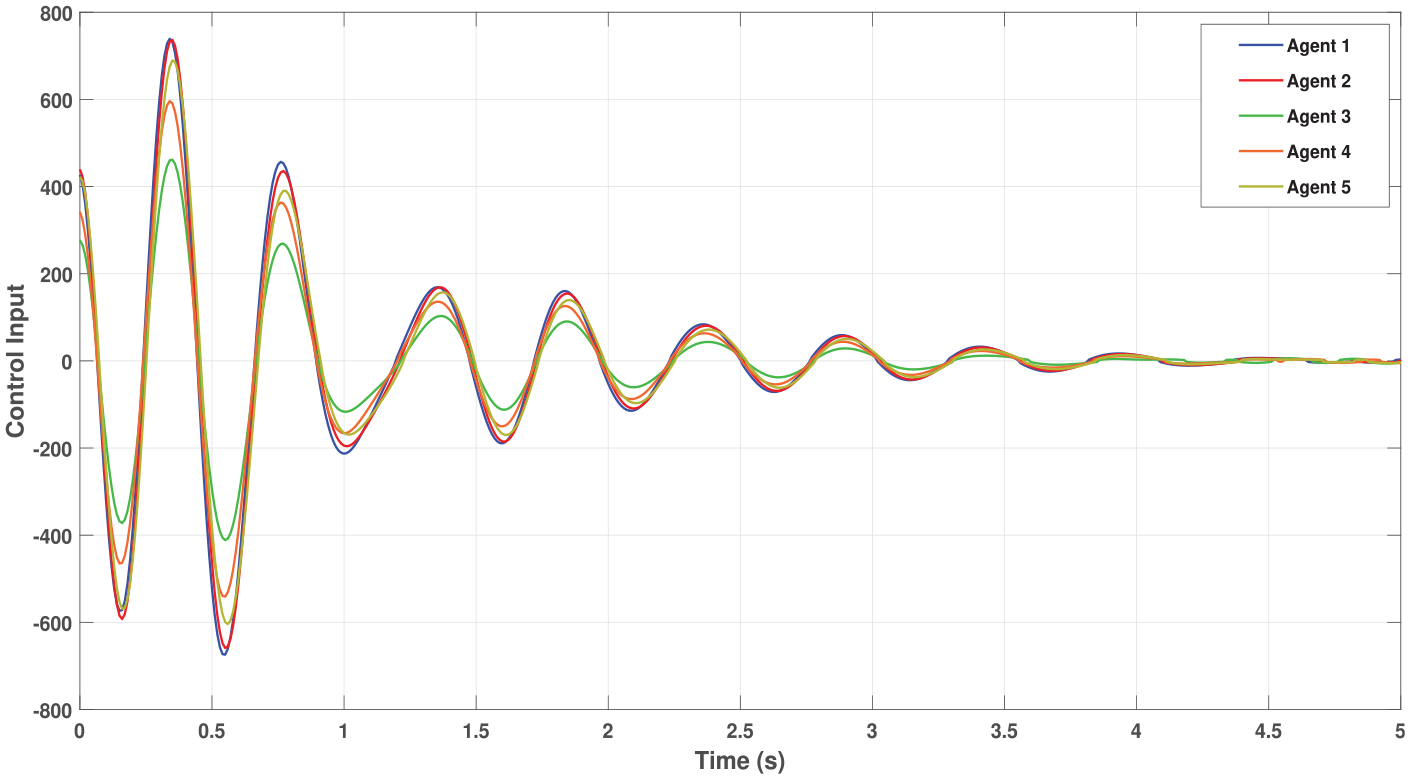
The longitudinal displacement of each vehicle is observed to attain consensus by maintaining the inter agent distance and continues to move in the time varying trajectory. Figure 7 illustrates the longitudinal position of five vehicles in dynamic consensus without any constraints imposed on it. Figure 8 depicts their lateral position. Initially the vehicles are found to vary from the reference trajectory to both the directions ranging from −150 to 200 m then later on they attain a constant position with zero deviation and continues to move through it. Figures 9 and 10 show the vehicle yaw angles and yaw rates, respectively. The vehicles exhibit yaw angle variations between −10° and +20°. However, the deviations are minimized with time finally reaching dynamic consensus. Value of yaw rate is found to vary from −50°/s to +50°/s for the five vehicles and they are found to be in synchronization. The control input of the system, which is the steering angle of the vehicle is demonstrated in Figure 11 and varies from −2.5° to +2.5°.
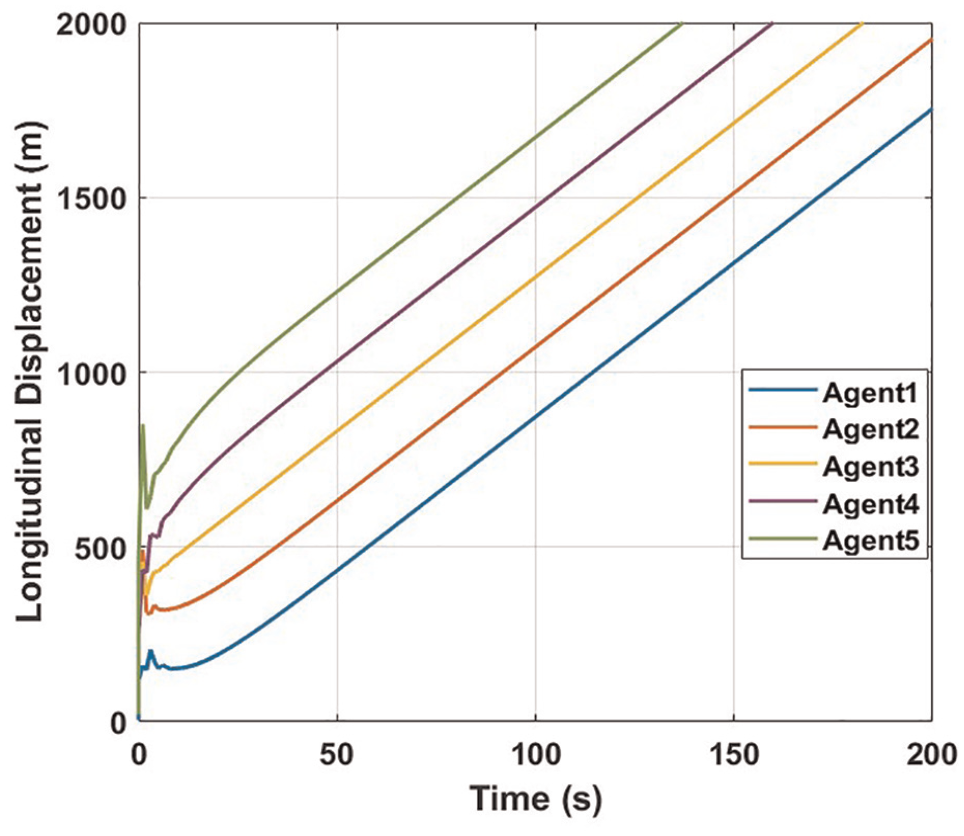
Longitudinal position of vehicle platoons using DMPC without constraints.
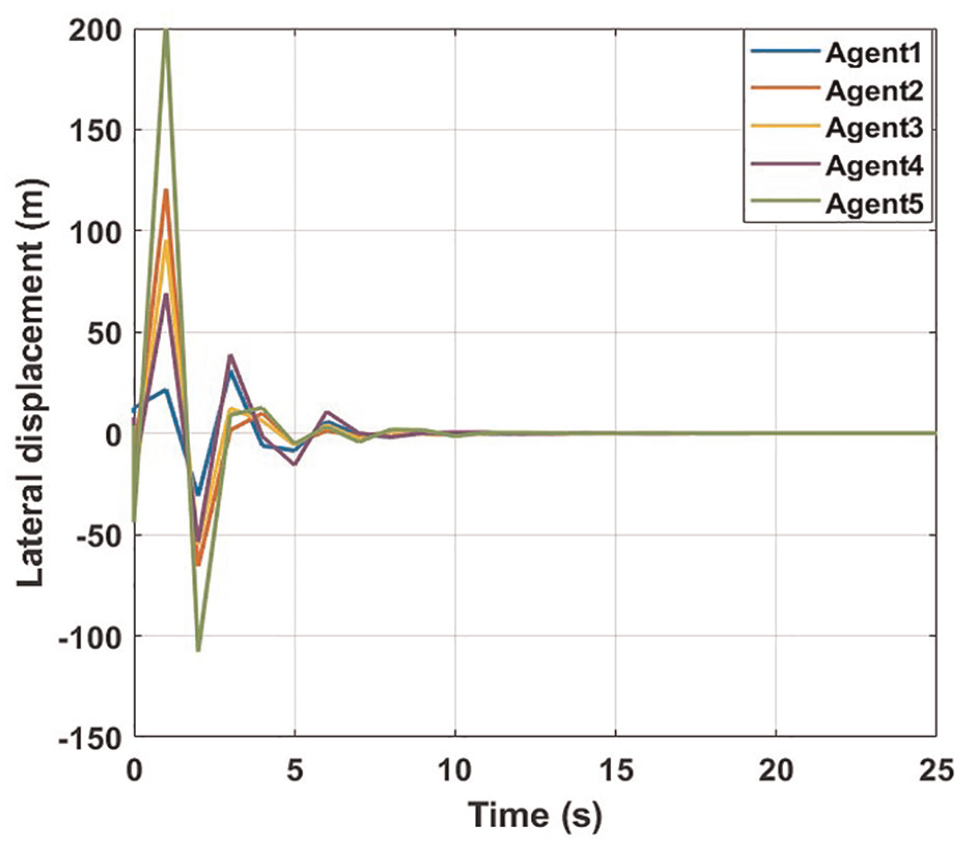
Lateral position of vehicle platoons using DMPC without constraints.
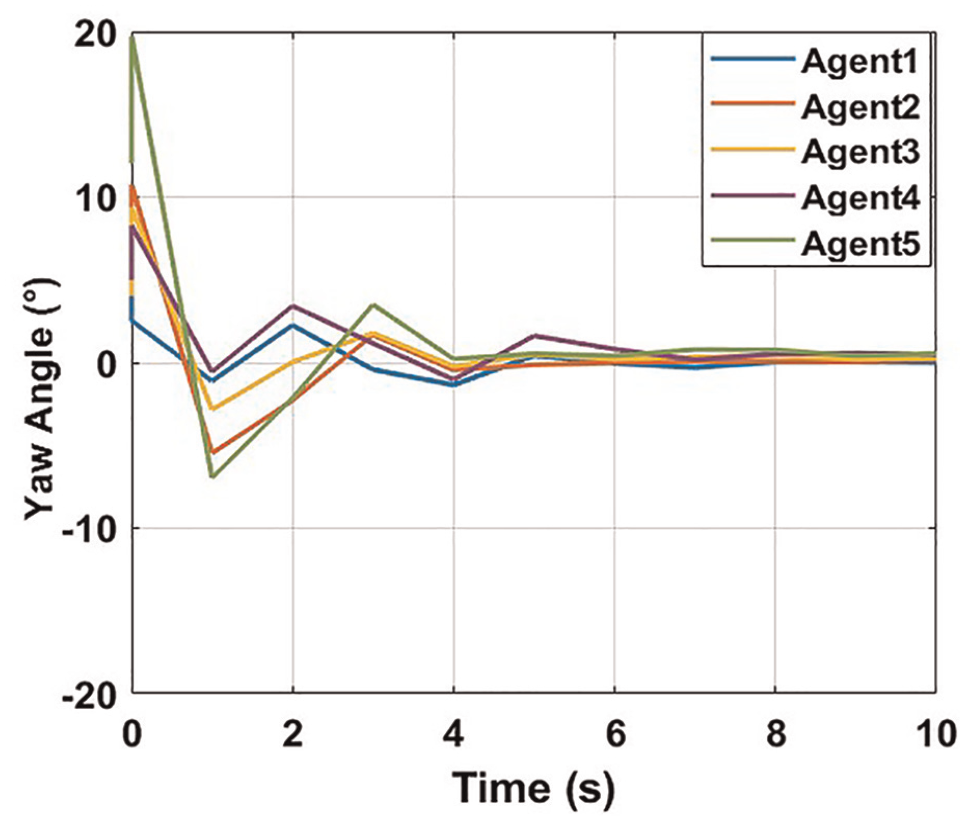
Yaw angle of vehicle platoons using DMPC without constraints.
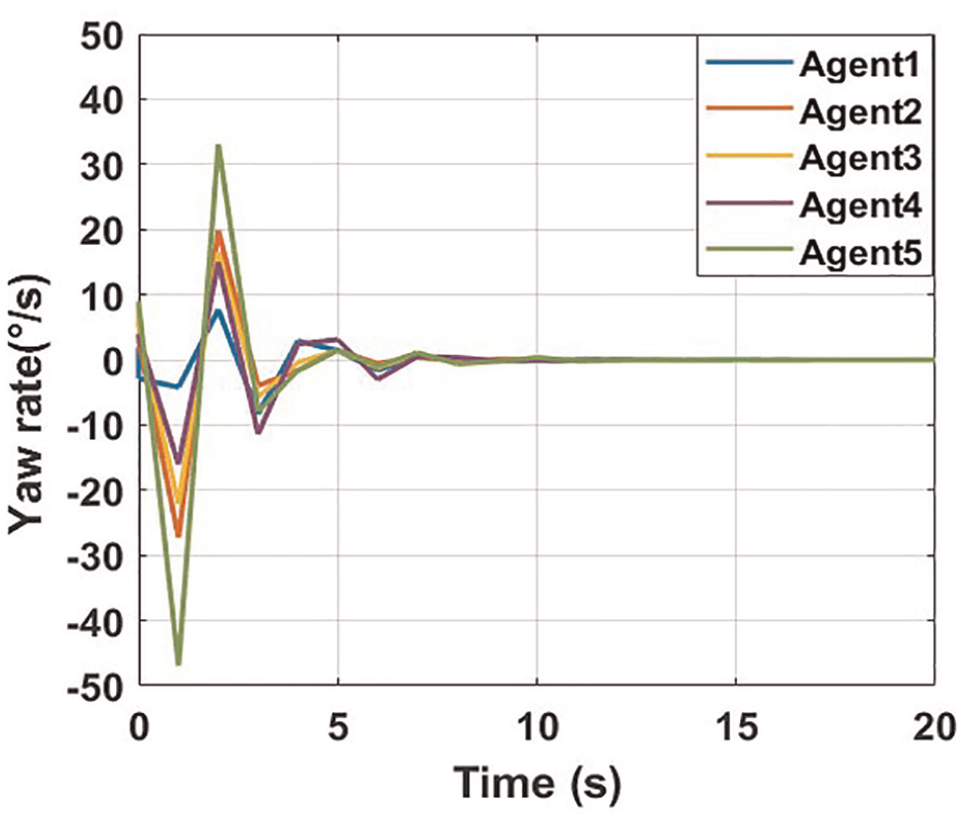
Yaw rate of vehicle platoons using DMPC without constraints.
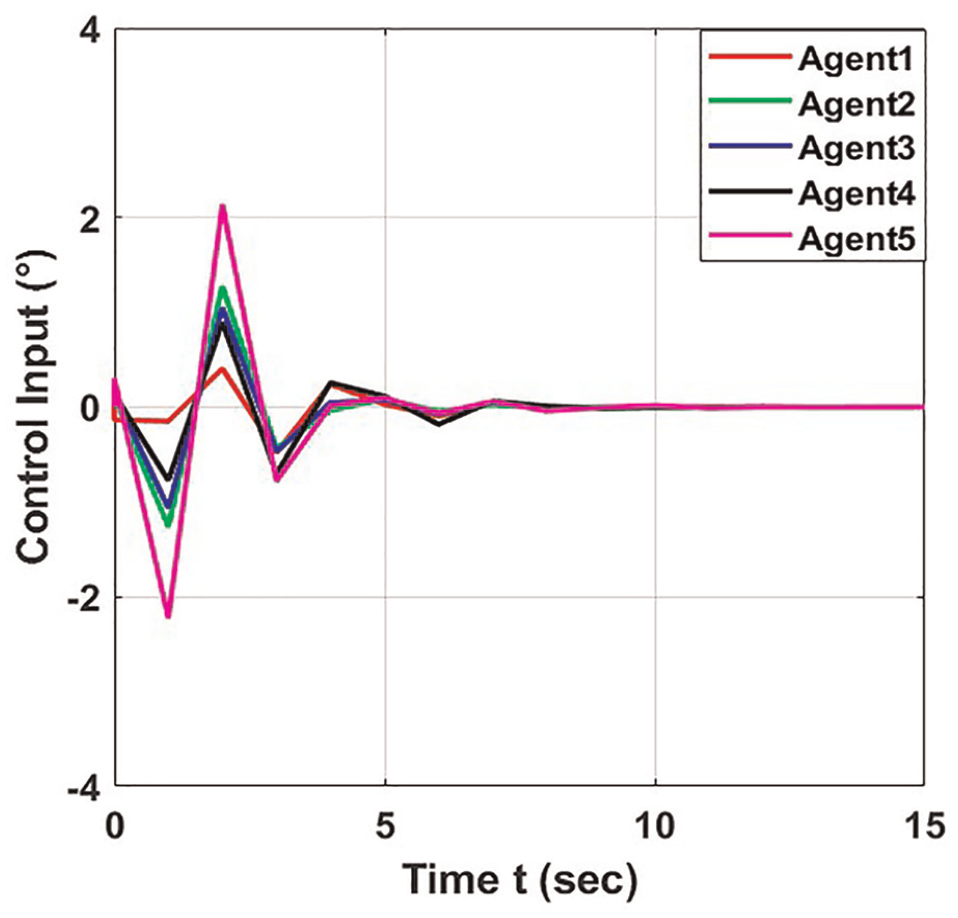
Control input of vehicle platoons using DMPC without constraints.
Constrained DMPC with first set of initial conditions
This section introduces constraints onto the control input and states of the system. The control input constraint is given as
Lateral displacement of vehicle platoons using constrained DMPC with first set of initial conditions.
Longitudinal displacement of vehicle platoon using constrained DMPC with first set of initial conditions.
The dynamic consensus of yaw angle and yaw rate in the five vehicles are shown in Figures 14 and 15. This graph effectively illustrates the changes that occur when limitations are imposed. Values with a greater deviation in the preceding scenario, without constraints, now have a considerably smaller difference. Both the yaw rate S and the yaw angle
Yaw angle of vehicle platoons using constrained DMPC with first set of initial conditions.
Yaw rate of vehicle platoons using constrained DMPC with first set of initial conditions.
Control input of vehicle platoons using constrained DMPC with first set of initial conditions.
Constrained DMPC with second set of initial conditions
This section implements identical constraints as the previous one, however the initial values of the states of each vehicle are modified and the performance of each state is analyzed through simulations. The second set of initial conditions used for the computations is given as:
The position of the five vehicles are
The lateral velocity is given as
The yaw angle or vehicle’s heading angle
The yaw rate
The constraints on the states and control input used in this part of simulations is similar to that in case of first set of initial conditions, which are:
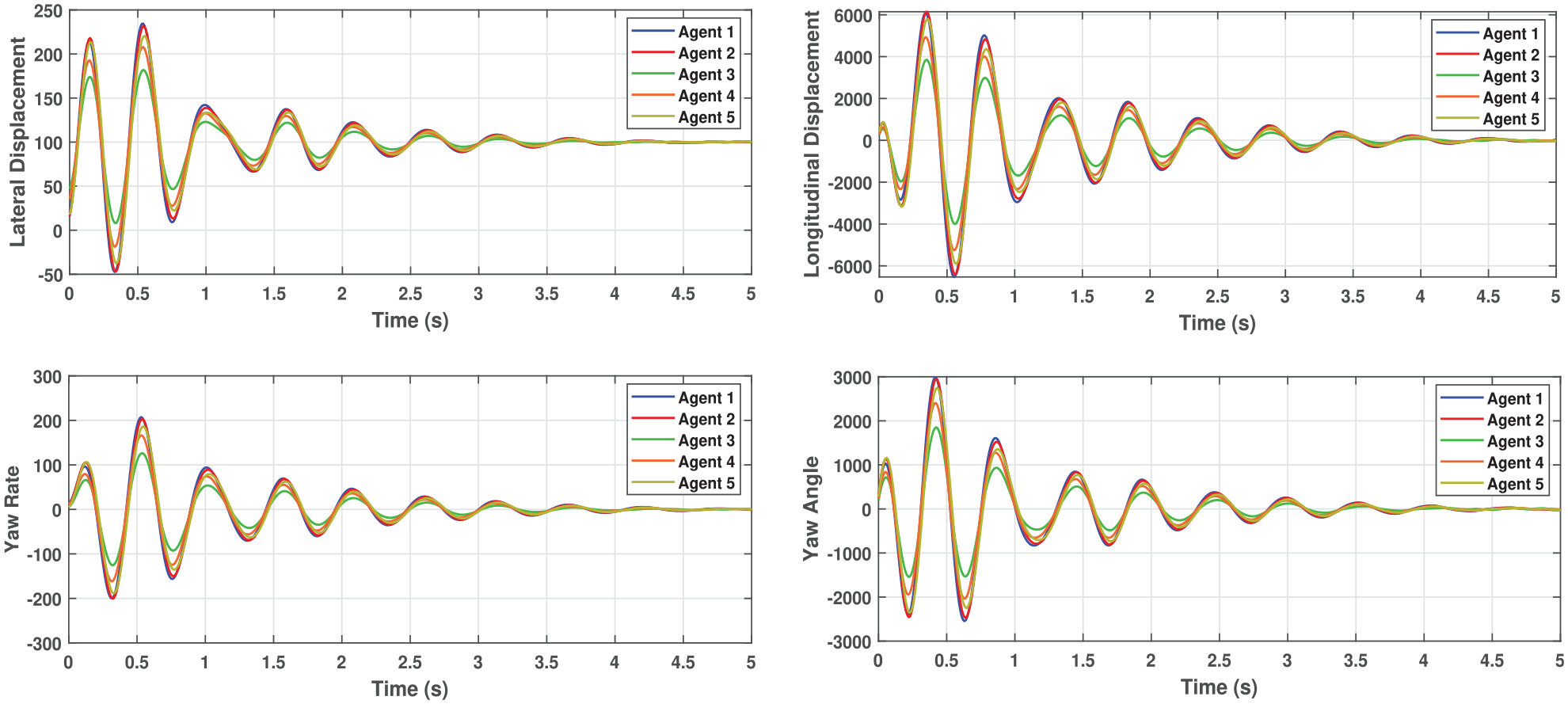
Lateral and longitudinal position along with yaw angle under observation are given in Figures 17–19 respectively. Yaw rate and control input are shown in Figures 20 and 21. The simulation results prove that the five vehicle continue to be in dynamic consensus and maintain the state values within the constraints imposed. The control inputs on the vehicles are also found to be under the constrained control approach of DMPC.
Lateral displacement of vehicle platoons using constrained DMPC with second set of initial conditions.
Longitudinal displacement of vehicle platoon using constrained DMPC with second set of initial conditions.
Yaw angle of vehicle platoons using constrained DMPC with second set of initial conditions.
Yaw rate of vehicle platoons using constrained DMPC with second set of initial conditions.
Control input of vehicle platoons using constrained DMPC with second set of initial conditions.
Comparative analysis
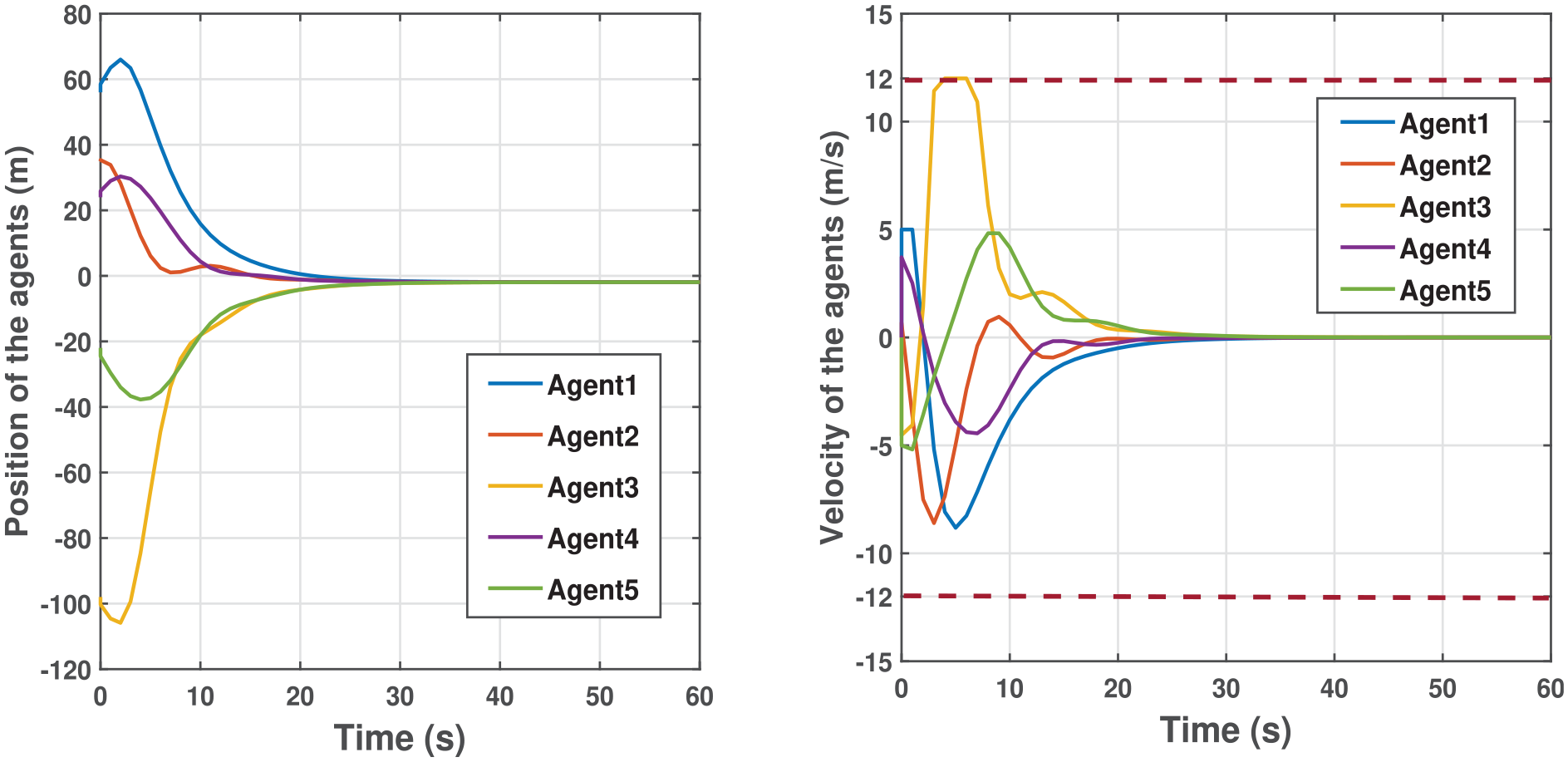
To establish the robustness of the proposed DMPC design, a comparison of the proposed design is carried out with a five agent MAS, where each agent has second order dynamics governed by position and velocity terms.


where the state vector,
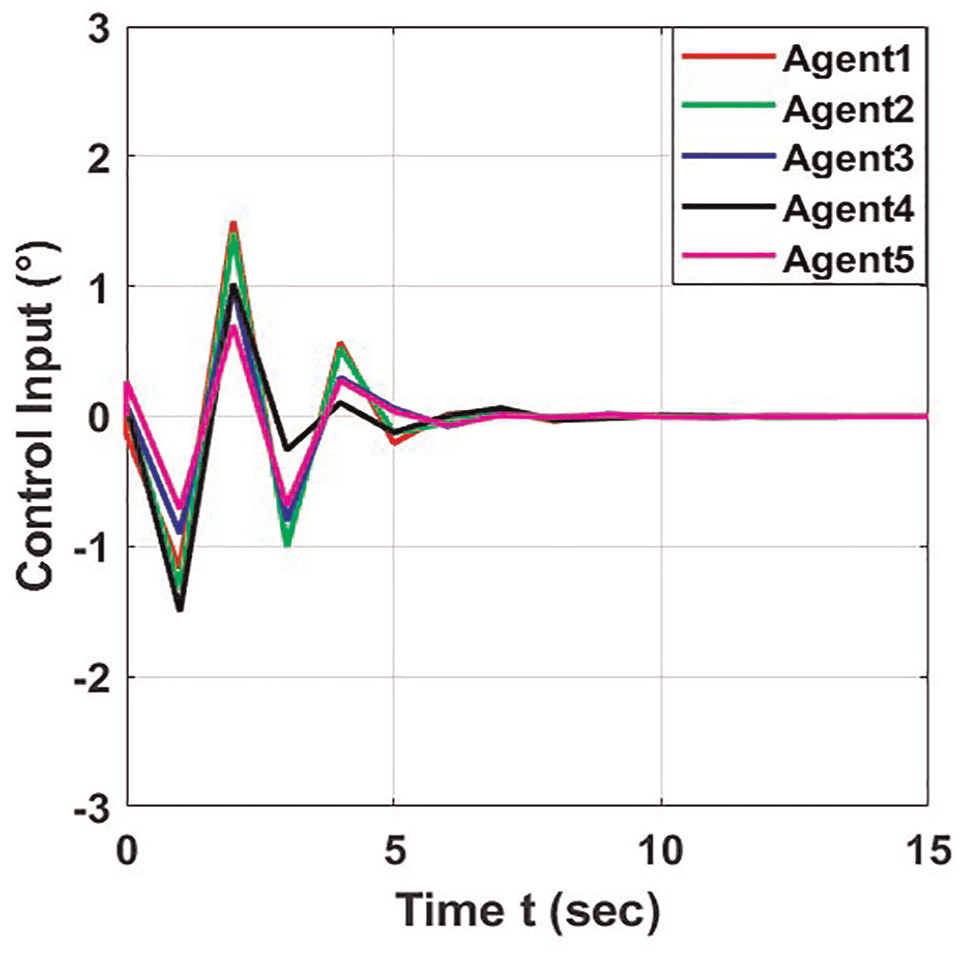
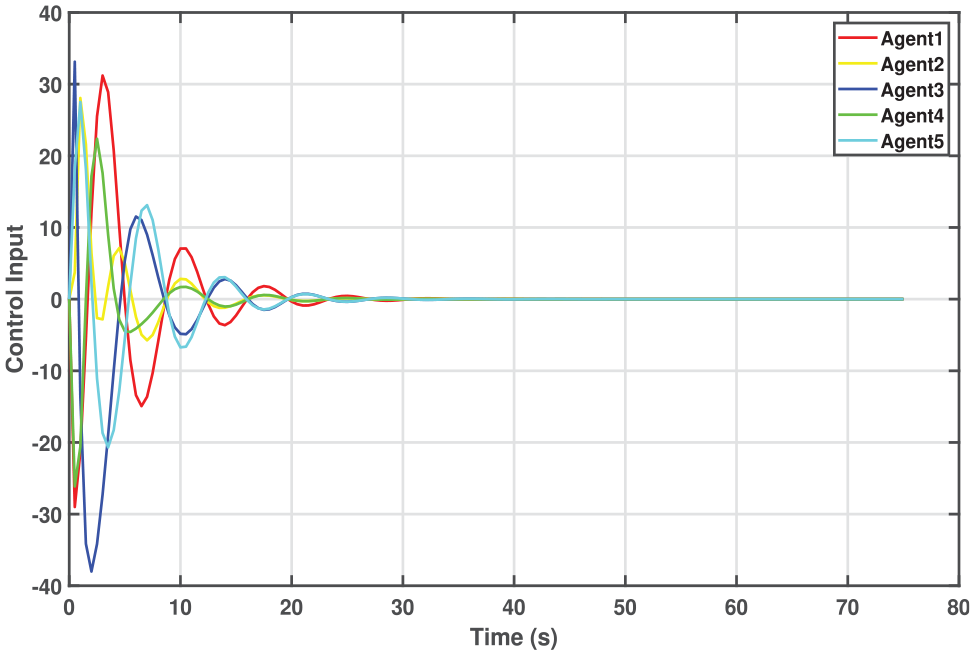
The agents achieve consensus in position and velocity, satisfies the constraints and the control input settles to zero. It is observed that the trajectories are smooth with less oscillations under the DMPC protocol and the agents converge fast. This confirms the robustness of the proposed DMPC design. The performance comparison in Table 2 assesses the relative effectiveness of the proposed DMPC design, demonstrating its potential in constraint satisfaction.
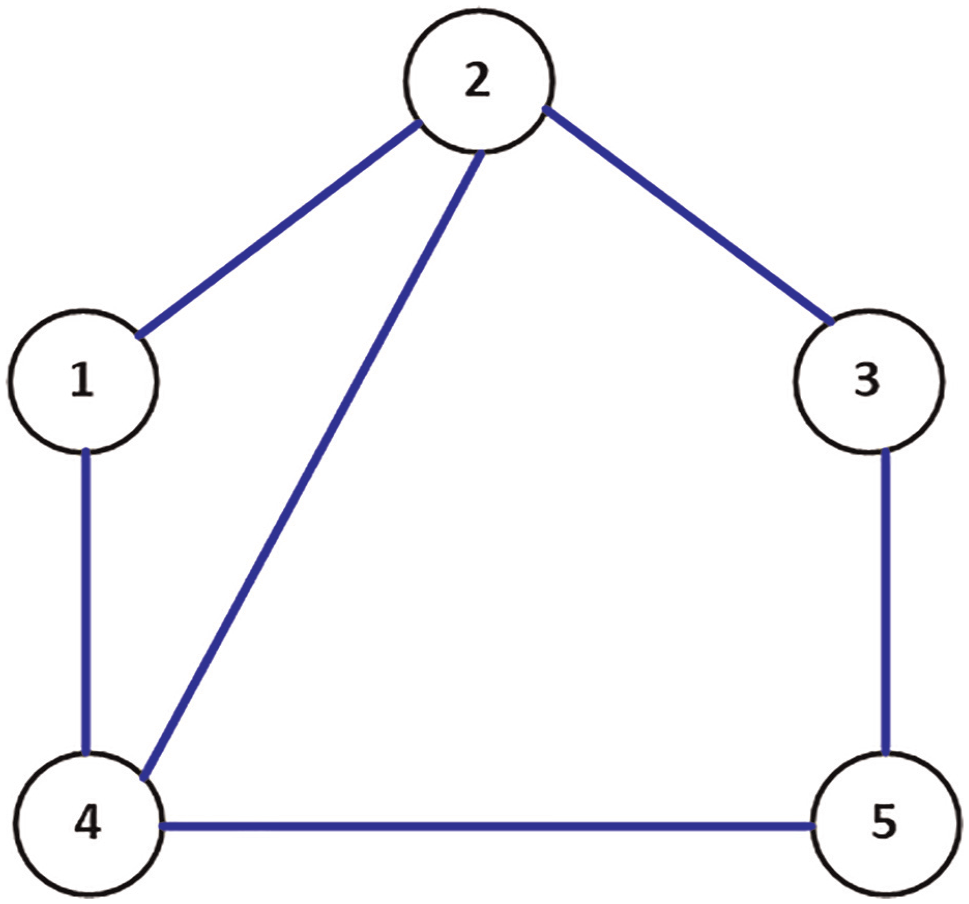
Network topology of the agents.
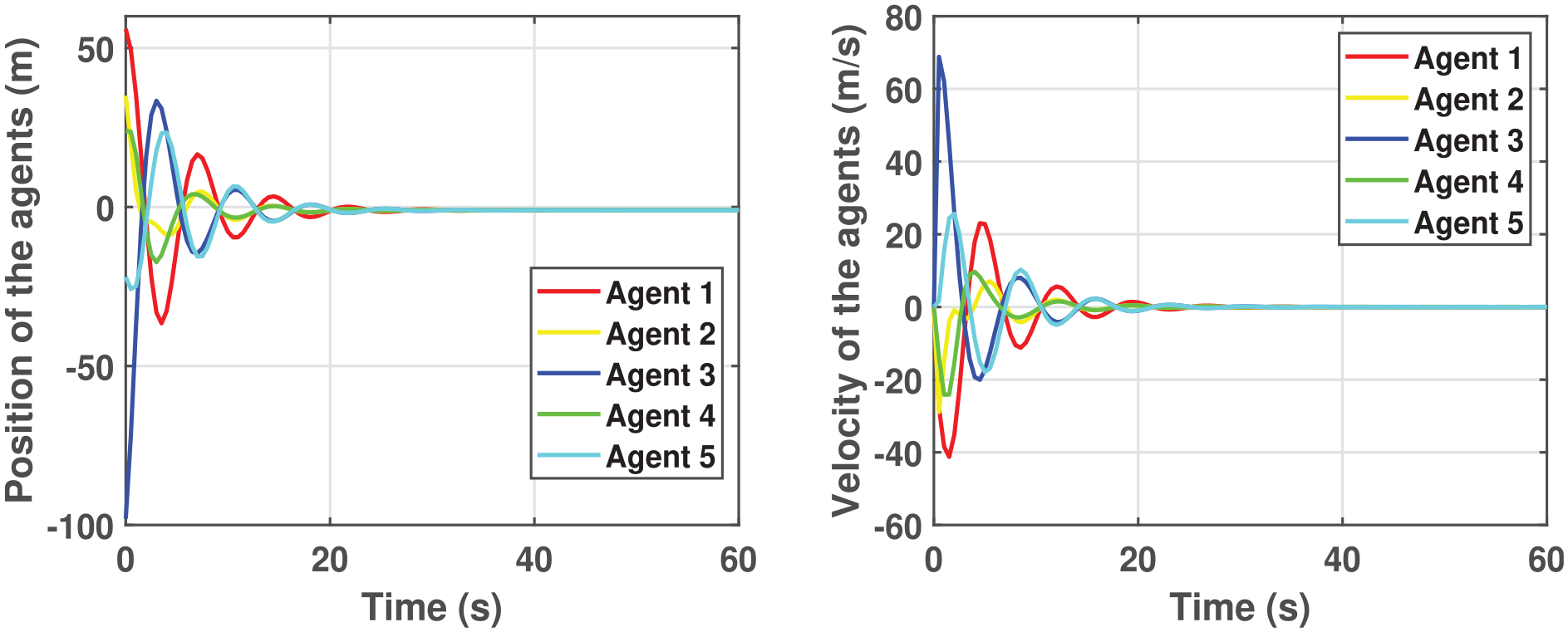
Time history of the states of the agents.
Control input to the agents.
Time history of the states of the agents using DMPC.
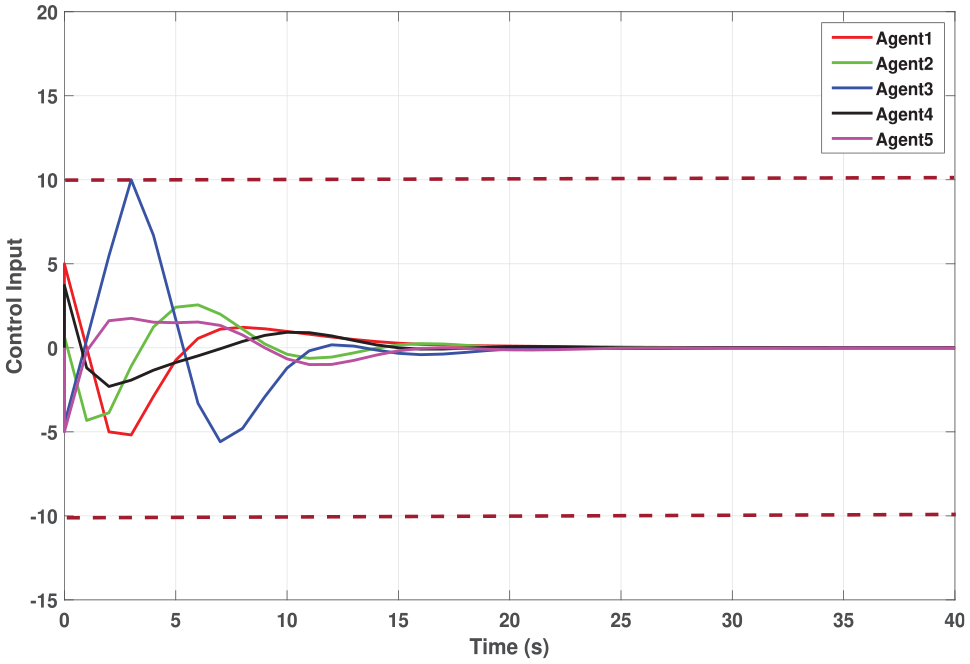
Control input to the agents using conventional DMPC.
Performance metrics.

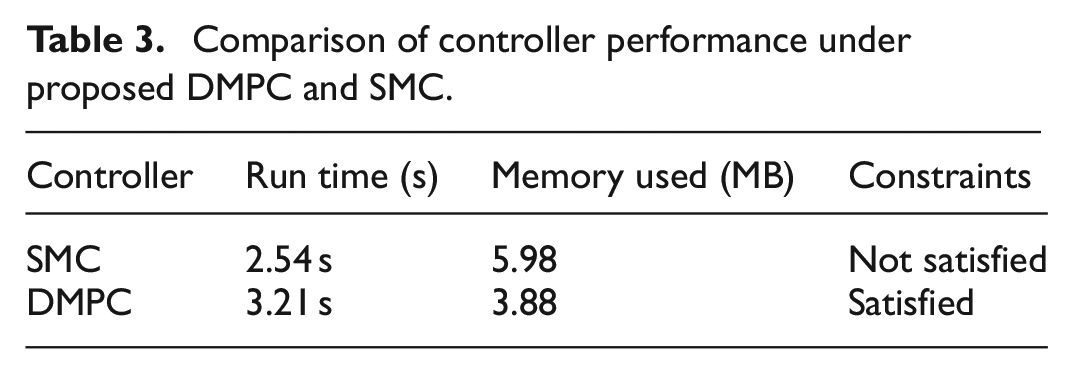
Furthermore, a performance comparison of the proposed DMPC is conducted with Sliding Mode Control (SMC) for the cluster of grounded vehicles for the same set of initial conditions and the results are tabulated in Table 3. The plot of vehicles achieving consensus and their control input is depicted in Figures 27 and 28. Eventhough the trajectories under SMC seem to be smoother, it is observed that the vehicles do not satisfy the constraints in state and control inputs unlike those in DMPC. The state variables reach substantially high values before achieving consensus which adversely affects the controller effort. Moreover, tuning the control parameters is challenging in SMC when it comes to complex high dimensional systems. Improper parameter design will lead to slow convergence, increased chattering and instability. The performance analysis of DMPC and SMC indicates that the execution time and memory consumption of both controllers are comparable. Nevertheless, the DMPC design guarantees optimal control actions in a real-time constrained environment compared to SMC.
Comparison of controller performance under proposed DMPC and SMC.
Time history of the states of the agents using SMC.
Control input to the agents using SMC.
Conclusion
This paper proposes a DMPC strategy for achieving consensus in linear multi-agent systems, specifically applied to ground vehicle platooning. The methodology effectively addresses static and dynamic consensus while rigorously considering state and control constraints, ensuring practical applicability. Theoretical analysis confirm the stability and feasibility of the proposed approach, while MATLAB simulations demonstrate its effectiveness in achieving coordinated vehicle behavior under various dynamic conditions. Comparative studies with existing control schemes further validates the advantages of the DMPC-based approach, highlighting its superior performance in terms of robustness, efficiency, and scalability. These findings underscore the potential of DMPC as a reliable and efficient strategy for multi-agent coordination tasks, particularly in the context of automated vehicle platooning. Future work may extend this framework to incorporate a controller design that accounts for lateral and longitudinal vehicle dynamics while also addressing uncertainties, communication delays, and heterogeneous systems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Ethics approval
Not applicable.
Informed consent
The authors affirm that there were no informed consents during the preparation of this manuscript.
Consent to participate
Not applicable.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.