
Abstract
Both Terrestrial Laser Scanners (TLSs) and Metrological Laser Radars (MLRs) are typical Spherical Coordinate Laser Scanners (SCLSs), which are used for various fields requiring surface 3D scanning. TLSs are popular in historical preservation and archiving, reverse engineering, surveying geographic modeling, and digital cities, etc. MLRs, on the other hand, are primarily applied in large-scale precision measurements in industrial manufacturing due to their high accuracy in scanned 3D points. The 3D point precision of both TLSs and MLRs is affected significantly by geometric errors inside instruments. While the geometric errors of SCLSs have been reviewed in some studies, a systematic review of external non-instrumental errors and internal non-geometric errors for TLSs and MLRs is still lacking. These error sources also affect the measurement accuracy of SCLSs. This paper aims to review the quantitative and qualitative analysis of external non-instrumental errors and internal non-geometric errors in TLSs and MLRs. The external non-instrumental errors are further classified into surface properties, scanning geometry, and working environment in this review. For internal non-geometric errors, current research primarily focuses on laser signal processing but lacks studies on error mechanisms and their impact on accuracy. Most existing studies address Time-of-Flight (ToF)-based TLSs, with limited attention given to MLRs. While external factors such as scan depth and surface reflectance are well-studied, environmental factors like temperature remain underexplored. Additionally, there is insufficient research on error compensation models for external factors. Future research on MLRs may focus on several aspects. These include analyzing external non-instrument error factors qualitatively and quantitatively, developing error compensation models, studying the impact of the working environment, and evaluating uncertainty using large-scale standard objects. This review may be beneficial for understanding the research development about the non-instrumental and non-geometric errors of SCLSs.
Keywords
Introduction
The widely used Spherical Coordinate Laser Scanners (SCLSs) at present mainly include Terrestrial Laser Scanners (TLSs) and Metrological Laser Radars (MLRs). TLSs offer several advantages, including being lightweight, fully automated, and non-contact. They also support long-range, high-speed scanning without the need for markers and can capture vast amounts of point cloud data, enabling rapid determination of the sizes, shapes, and positions of various objects. It has already achieved successful applications in fields such as historical preservation and archiving, reverse engineering, surveying geographic modeling, and digital cities. On the other hand, a MLR is a versatile three-dimensional (3D) metrology system that supports non-contact and targetless surface measurement of large objects, including aircraft wings, ship bows, large antennas, wind turbine blades, and large molds, etc. It can overcome the limitations of a traditional Laser Tracker (LT). Although the measurement rate of a MLR is usually much smaller than that of a TLS, its 3D point precision is close to the precision level of a LT and significantly superior to that of a TLS. Therefore, the potential applications of MLRs in the manufacturing industry are highly encouraging.
According to different application domains of TLSs, researchers have published some review papers. An important application area of TLSs is in construction engineering, and a few surveys can be found for this domain. Focusing on TLS efficiency improvement of data collection in construction, Aryan et al. 1 presented a review of Planning for Scanning (P4S) works in the construction domain. They also proposed a quality criteria categorization of TLS point cloud data. Wang et al., 2 Rashidi et al., 3 and Soilán et al. 4 presented the application surveys of TLSs for tunnels, bridges, and road/railway infrastructure, respectively. Additionally, both Mukupa et al. 5 and Shen et al. 6 reviewed the applications of TLS in the monitoring of structures.
In addition to the above reviews on the application of TLS in the domain of construction engineering, there are also three reviews on TLS applications in surveying geographic modeling, monitoring forest resources, and digital archiving of heritage buildings. Telling et al. 7 discussed the advantages and limitations of TLSs in terms of important work published in the fields of spectral and structural geology, seismology, natural hazards, geomorphology, and glaciology. Liang et al. 8 reviewed the applications of TLSs in forest inventories. Calders et al. 9 also provided the review of current developments in TLSs to monitor forest structure. Liu et al. 10 presented a systematic review of TLS applications for Heritage Building Information Modeling (HBIM) based on the 58 selected articles.
Additionally, a small number of TLS technique reviews summarized calibration methods of geometric errors inside TLSs, as well as its performance evaluation and point cloud registration methods. Lichti 11 reviewed the systematic error models inside TLSs and their self-calibration methods. Recently, Muralikrishnan 12 reviewed recent work of TLS performance evaluation, and discussed the role of these test procedures in establishing metrological traceability of TLS measurements. Dong et al. 13 reviewed TLS point cloud registration methods and provided a large-scale benchmark data set in order to support the development of cutting-edge TLS point cloud registration methods.
The existing surveys above show the application development of TLSs in engineering, historical archiving, geo-spatial surveying, and forest inventory monitoring, etc. However, the application of SCLSs including TLSs and MLRs in the industrial manufacturing sector still faces challenges. The 3D point precision of both TLSs and MLRs is affected significantly by geometric errors inside instruments. However, even after compensation for these geometric errors within TLSs, the current precision of TLSs still fails to meet the requirements of the industrial manufacturing sector. Meanwhile, MLRs have higher measurement accuracy, and have been used in the manufacturing industry. However, due to the influence of external factors such as scanning geometry and object surface properties, the actual measurement errors of MLR are often larger than those based on the specifications from the manufacturers. Similarly, TLSs also encounter the same issue, where measurement accuracy is also affected by the external non-instrumental error sources. However, no reviews can be found for the research papers about these external non-instrumental error sources. Therefore, this paper aims to review the quantitative and qualitative analysis research of non-instrumental and non-geometric errors of TLSs and MLRs
The organization of this paper is given as follows. In Section 2, the development and the error sources of SCLSs are addressed and analyzed in Section 2. In Section 3, the papers about non-instrumental and non-geometric error analysis and calibration for SCLS are reviewed. The conclusions are made finally.
Error sources of spherical coordinate laser scanners
SCLSs, including both TLSs and MLRs, obtain coordinates of object surface points based on the measurement of horizontal angles, vertical angles, and non-contact laser ranging, as shown in Figure 1. As shown in Figure 1, both TLSs and MLRs scan the surface of an object in spherical coordinates, obtaining the distance R, the vertical angle θ, and the horizontal angle ϕ. Therefore, the error sources are factors that affect the accuracy of these three values, including both instrumental errors and external non-instrumental errors. We will discuss these error sources in the following. However, currently, the applications and distance measurement principles of TLSs and MLRs are different. Table 1 shows the typical types of TLSs and MLRs.
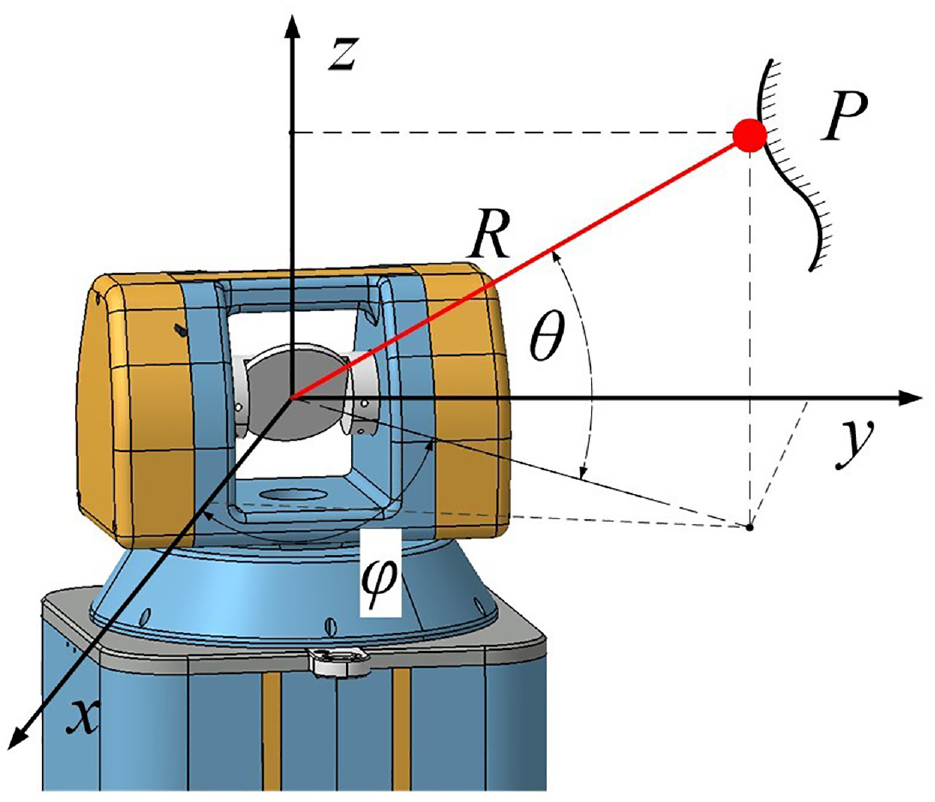
Basic principle of spherical coordinate laser scanners.
Comparison of scanning specifications among different spherical coordinate laser scanners.

The most important technical indices of SCLSs include range, measurement rate, angular precision, ranging precision, scan resolution, 3D point precision, and distance measurement precision, etc. The indices of 3D point precision and distance measurement precision are the core metrics for performance evaluation of SCLSs, and scan resolution often serves as the metric for its functional assessment.
Currently, there are two main ranging methods used in commercial TLSs. One is the Time-of-Flight (ToF) ranging method, and the other is phase shift ranging. As shown in Table 1, the majority of commercial TLSs, such as those from Leica, FARO, and Topcon, utilize the ToF ranging principle. These systems can achieve ranging distances of several 100 m. However, the precision of these TLSs is at the millimeter level. Phase shift ranging is primarily used for medium-distance TLSs, typically within a 100 m range, offering precision of the sub-millimeter level. For instance, the Surphaser 25HSX, a TLS based on phase-shift distance measurement, achieves a length measurement accuracy of approximately 0.2 mm for a 2.3 m length after calibration. 14 However, this level of precision is still insufficient to meet the requirements of the industrial manufacturing companies.
To meet the large-scale industrial measurement demands, MLRs have been developed, including the Laser Radar from Nikon and the Dynamic 9D LADAR from API, as shown in Table 1. These two MLRs employ the more precise ranging techniques, that is, Frequency-Modulated (FM) and Optical Frequency Chirping Interferometry (OFCI), ensuring the high accuracy needed for three-dimensional scanning measurements. However, as shown in Table 1, the measurement rates of MLRs are significantly lower than those of TLSs.
The technical specifications of SCLSs are affected by four types of major factors: instrument mechanism, working environment, object surface properties, and scanning geometry. 15 Figure 2 shows all possible error sources of SCLSs. The instrument mechanism refers to the internal workings or operating principles of SCLSs, which leads to instrumental errors in Figure 2. While the error sources incurred by working environment, object surface properties, and scanning geometry are collectively referred to as non-instrumental errors in this study, shown in Figure 2.
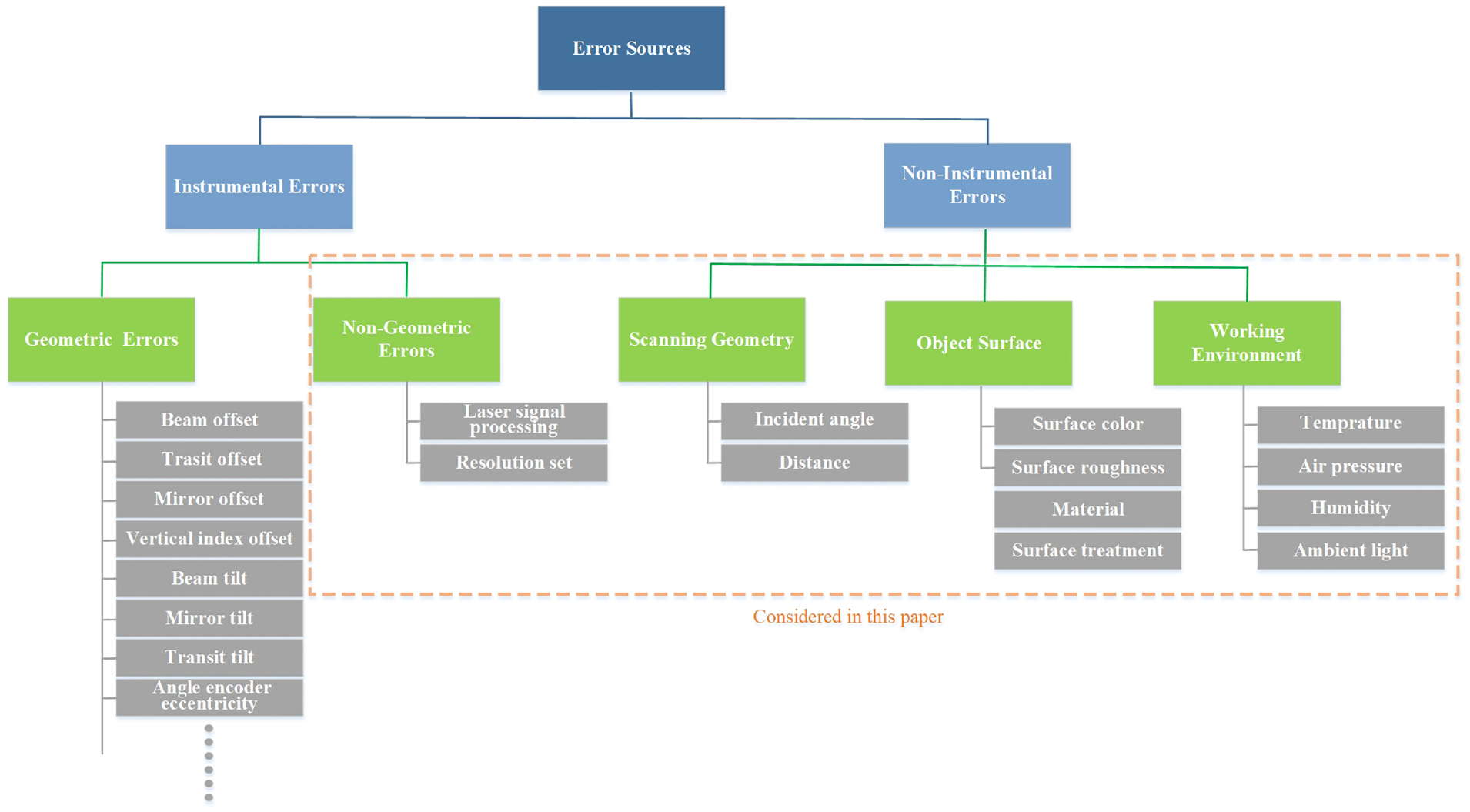
Error sources of spherical coordinate 3D laser scanners.
As shown in Figure 2, instrumental errors are further classified into geometric errors and non-geometric errors. Geometric errors are the geometric misalignments and eccentrics inside an SCLS,11,14 such as beam offset, transit offset, mirror offset, vertical index offset, beam tilt, mirror tilt, and angle encoder eccentricities. And non-geometric errors include all factors within the instrument, except the aforementioned geometric error sources, that contribute to scanning measurement errors. As shown in Figure 2, non-geometric errors are mainly those introduced by signal processing circuits 16 and those related to instrument resolution settings, etc.
Incident angels and distances of scanning geometry are the two important factors affecting SCLS precision, 15 as shown in Figure 2. Object surface properties, mainly including surface color, surface roughness, object material and surface treatment, are also non-instrumental error sources that can lead to obvious errors of 3D point clouds of SCLSs. Working environment, such as temperature, pressure, humidity, and ambient light, can also impact the measurement accuracy of SCLS, as shown in Figure 2.
FM lasers are largely unaffected by ambient lighting conditions and variations in surface reflectivity because FM laser radars use beat frequency for range calculations, which does not rely on signal amplitudes. This capability allows the FM Coherent system to perform accurate measurements even with only one picowatt of returned laser energy, achieving a dynamic sensitivity range spanning nine orders of magnitude. 17
In the next section, the research review of non-instrumental and non-geometric errors of TLSs and MLRs is given.
Non-geometric error sources inside SCLSs
Except geometric misalignments and eccentrics inside SCLSs, that is, geometric error sources, its precision can be also affected by non-geometric error sources inside SCLSs. Research on this type of error sources is relatively scarce.
The accuracy of obtained intensity is important for TLSs. For example, contrast targets are often used for TLS calibration, and the intersection point of the two diagonals on a contrast target is dependent on the intensity result of target surface. 14 Zygmunt et al. 16 proposed a method for real-time measurement of the intensity of laser reflection signals from ToF-based TLSs, which is affected by the amplifier saturation mechanism of the laser reflection signal detection channel inside the instrument. Their research laid the foundation for subsequent intensity calibration of surface point clouds from TLSs. Fang et al. 18 analyzed the generation mechanism of the intensity error of a specific TLS, and proposed a model to correct the distance effect on its obtained intensity. Their method used a novel sample data collection design to estimate the parameters of the distance-intensity model, and conducted an intensity distortion analysis experiment on the real-scene scanning of the Mogao Caves in Dunhuang. Kersten and Lindstaedt 19 compared the distance accuracies of five different commercial types of TLSs. They also found a clear linear relationship between increasing scan resolutions and flatness measurement errors for some of the used TLSs. Boehler et al. 20 constructed a 300 mm × 300 mm box. Its front panel has slots which are 30 mm wide at the outside and are smaller toward the box center. By scanning this box, the effect of resolution on the 3D point accuracies of 10 TLSs is qualitatively analyzed and evaluated. Considering the overlap and correlation problem of neighboring laser spots, Schmitz et al. 21 developed a method to determine the spatial expansion of the resolution capability of TLSs in the angular direction for distances up to 80 m. Furthermore, they derived the correlation of neighbored range measurements from the resolution capability, determining the effective number of measurements.
From the summary of the aforementioned papers, it can be seen that current research on non-geometric error sources inside SCLSs primarily focuses on issues of intensity errors caused by internal circuits and measurement errors related to resolution sets.
Non-instrumental error sources
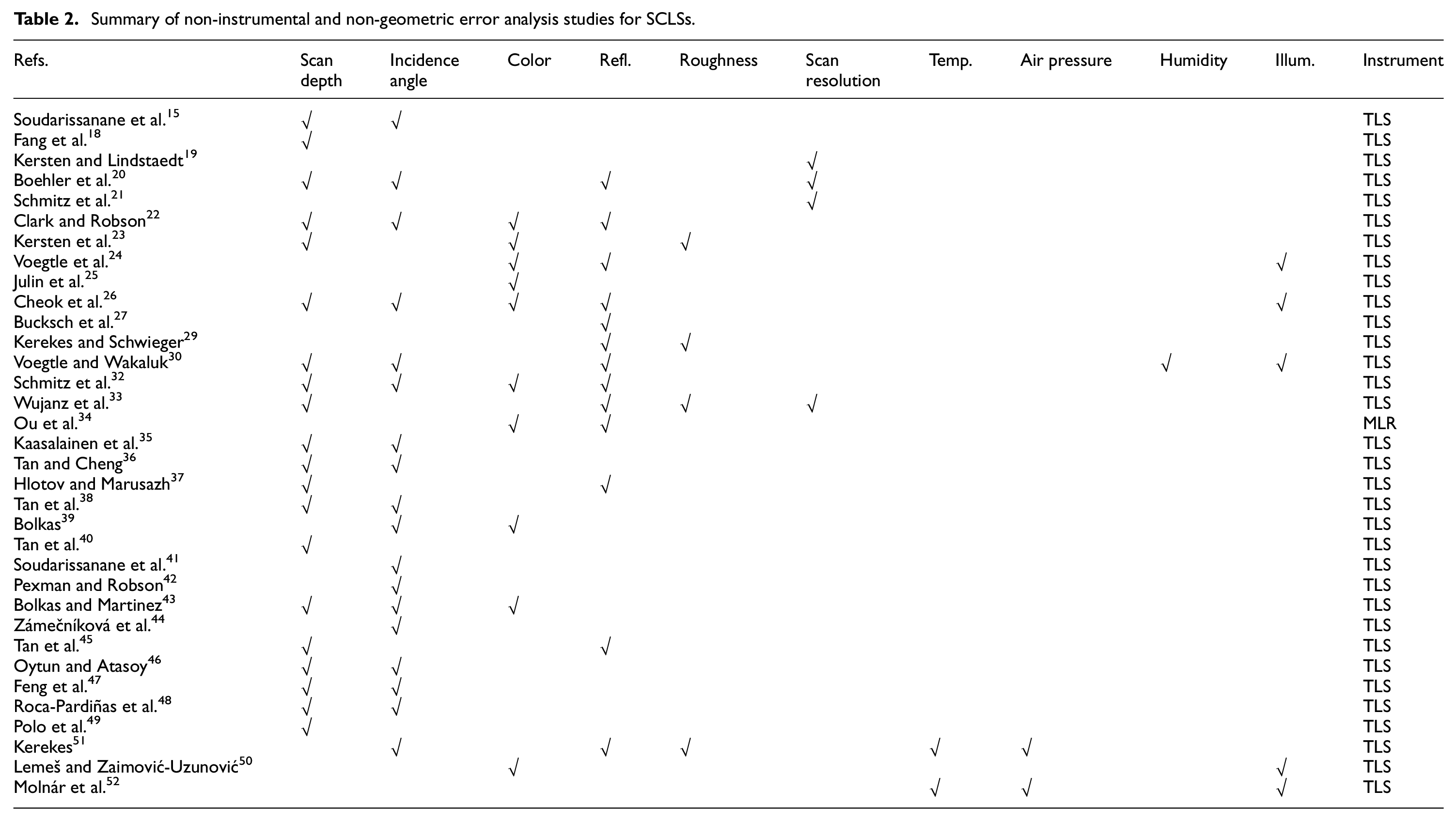
As shown in Figure 2, the non-instrumental error sources can be further classified into surface properties, scanning geometry, and working environment. In this section, the literature review on the research papers related to these three aspects is conducted. Most of the given papers below simultaneously discuss two or more error factors, which are summarized in Table 2.
Summary of non-instrumental and non-geometric error analysis studies for SCLSs.
Surface properties
When acquiring a 3D point of an object surface through scanning, SCLSs must rely on the laser signal that is directly reflected from the object surface and returned to the receiving unit inside the instruments. The intensity of the returned laser signal is affected by the surface properties such as the reflectivity, color, and roughness. For ToF-type SCLSs, these surface properties may cause intensity errors, which can also lead to ranging errors and 3D point coordinate errors. White surfaces generally produce strong reflections, while black surfaces have poorer reflection effects. The reflection effect of colored surfaces depends on the spectral properties of the laser (such as green light, red light, or near-infrared light). 20 For SCLSs that implement ranging based on the frequency-modulated or Phase-shift principle (e.g. MLRs), this effect is less significant. In the literature, surface properties have been discussed in several research papers analyzing non-instrumental error sources of SCLSs.
The color and roughness of an object’s surface can affect its surface reflectivity. One of the key research areas regarding non-instrumental error factors is the effect of surface color on scanning accuracy of SCLSs.
Boehler et al. 20 analyzed the effect of surface reflectivity, color and object materials on point errors of TLS, as well as the edge effect of point clouds obtained by TLSs. Clark and Robson 22 investigated the accuracy of a Leica HDS2500 laser scanner for scanning the different surfaces of specified color characteristics in their laboratory, showing that significant systematic range discrepancies exist which are related to the color of each surface, the object distances, the incidence angles, and the wavelength of the laser. Kersten et al. 23 investigated the accuracy of the Mensi GS100 TLS from Trimble. Their tests revealed discrepancies in point cloud registration and geo-referencing, potentially caused by instrumental errors and the surface properties (the object color, material and surface roughness) of scanned objects. Voegtle et al. 24 discussed the influence of different materials and object colors on the geometric accuracy and intensity values of a TLS. The used materials include wood, metal plates, plaster materials, and light-transmissive materials. It is also concluded in their study that the accuracy of measurements at night-time was proved to be much better than at day time. Julin et al. 25 proposed a method for the evaluation of the point cloud colorization quality of TLS systems with integrated imaging sensors by using the targets, which can assess the capability of several TLSs to reproduce colors and details of a scene by measuring objective image quality metrics from 2D images. Based on their experiments, Cheok et al. 26 in the NIST found that reflectivity contributes to measurement error with highly reflective targets, exhibiting large errors in the shorter ranges and low reflective targets being less precise in the longer ranges. They also concluded that no obvious global color effect on accuracy, and measurement accuracy of TLSs is decreased for higher incidence angles. Bucksch et al. 27 developed six different gray patches ranging from 71% remission white to 0.05% remission black, which were scanned from a distance of 4 m by TLSs in a stable environment. They found that the measurement noise is significantly increasing with decreasing remission. Xie et al. 28 focused on the influence of target reflectance and color on TLS ranging errors based on the experiments of a Leica HDS3000 TLS. Their experimental results showed that the impact of object material and surface color on ranging was small, with an error RMS of less than 1 mm. The object materials in their experiments included wood, tiles, and iron plates. And nine different surface colors were selected. The five scanning distances were approximately 10, 30, 50, and 65 m, and 80 m.
There are few research reports on the impact of roughness on the measurement errors in SCLS 3D scanning. Kerekes and Schwieger 29 considered two surface properties: roughness and reflectance, and modeled their effects on TLS measurements stepwise in form of a so-called Synthetic Variance-Covariance Matrix (SVCM). They developed a polynomial model for the relationship among the distance measurement standard deviation of the used TLS, the range, and the surface reflectance, given as follows 29 :

where D is the distance from the TLS to the object surface,
Some scholars have also analyzed the impact of object surface properties on 3D scanning accuracy of SCLSs directly from the perspective of surface reflectivity. Voegtle and Wakaluk 30 analyzed the influence of material properties on TLS data quality, finding how distance, incidence angle, reflectivity, lighting, and humidity affect range correction, range measurement standard deviation, and intensity values for various building facade materials. The findings show that distance, lower reflectivity, and narrower incidence angles generally decrease data quality. José-Ramón et al. 31 proposed to detect wood moisture levels using a TLS based on the relation between the wood moisture and the surface reflectance values. While these reflectance values were related to the intensity of each 3D point cloud. Schmitz et al. 32 demonstrated a method to determine intensity-dependent range precision of TLS, using range residuals in laser beam direction of a best plane fit. They also investigated the quantitative relationship between the raw and scaled intensities. Wujanz et al. 33 developed an intensity-based stochastic model for the TLS Zoller + Fröhlich Imager 5006 based on their experiment, which modeled the influence of object surface intensity on distance measurement errors. Ou et al. 34 found that the measurement distances, incident angles, and reflectance of the calibrator have a great impact on the measurement results of the used MLR (Nikon MV330). They recommended using a spherical calibrator or a standard plane with a reflectance of approximately 18% as the standard and providing the material category and surface reflectance information of the standard when calibrating laser scanners according to measurement standards.
The studies above have analyzed the impact of surface properties, such as color and surface reflectance, on the scanning accuracy of SCLSs. Due to the vast variety of colors and the additional influence of surface reflectance, it is extremely challenging to establish a general error compensation model or a performance evaluation standard that account for color, material, and reflectance of the scanned object for SCLSs. However, a practical approach currently employed involves evaluating the measurement performance or scanning errors of SCLSs for specific scan objects by utilizing a planar standard method for surface analysis, in conjunction with the surface color of test objects.
Scanning geometry
Shapes of scanned objects and their relative positions to SCLSs can also affect scanning accuracy, which is called scanning geometry. It is mainly the effect of scanning distances and laser incidence angles on measurement accuracy of SCLSs (as shown in Figure 3). The laser incidence angle is the angle between the incident laser beam and the surface normal. To analyze the influence of incidence angles on the scanning measurement error of SCLSs, there are two methods currently reported in the literature: the rotating plate method and the standard object method. In the rotating plate method, standard planes at different distances and different rotation angles are scanned by SCLSs, and the results may reflect the influence of incidence angles by fitting the standard deviations of these planes. In the standard object method, measurement data from SCLSs are evaluated after scanning real objects with a certain curvature. Due to the influence of the object size, the standard object method cannot evaluate all measurement data within the allowable incidence angle range of the SCLS.
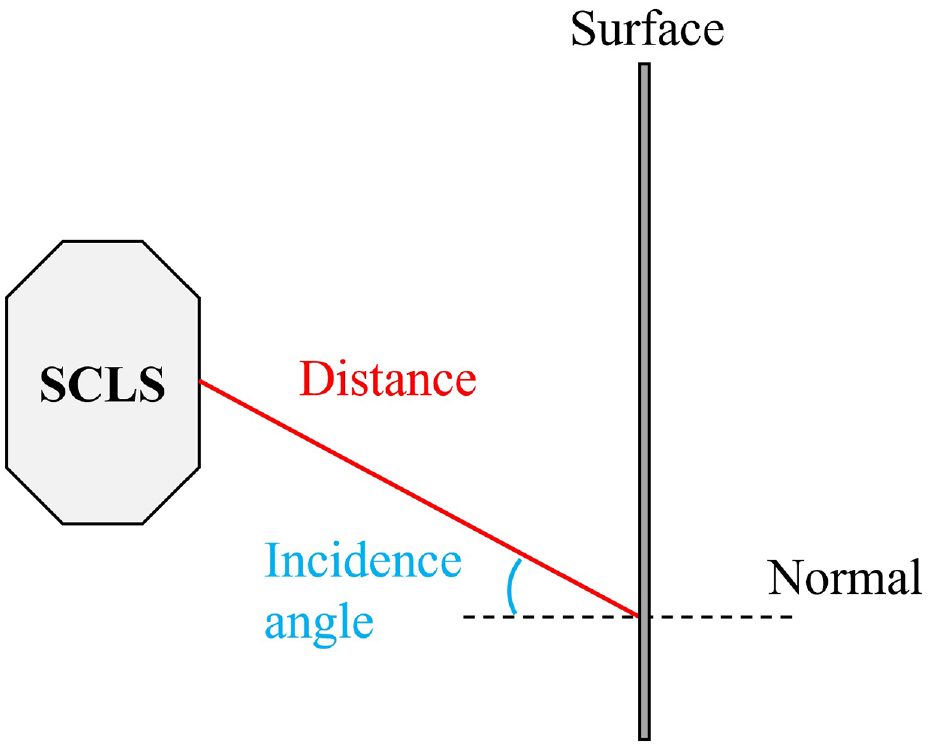
Diagram of scanning geometry.
One important research aspect of non-instrumental errors in SCLSs is the relationship between distances, incident angles, and intensity errors, as well as intensity correction models for SCLSs. Kaasalainen et al. 35 investigated the effects of scanning distances and incidence angles on the intensity measurements for several TLS instruments and targets, and they searched for the practical correction methods. They found that these distance and incidence angle effects are strongly dominated by instrumental factors and object surface properties, respectively. Tan and Cheng 36 also focused on the effects of incidence angle and distance on intensity data, taking the TLS of Faro Focus3D 120 as an example. They proposed a new method to reduce the incidence angle and distance effect based on the linear interpolation. Hlotov and Marusazh 37 analyzed the qualitative and quantitative relationship among the distance, the reflectance, and the measurement accuracy of TLS point clouds with the Faro Focus 3D S120. They concluded that the homogeneity of laser intensity values is higher for the white surface of the target. Tan et al. 38 analyzed the incidence angle–intensity relationship based on several reference targets scanned in the laboratory, which is derived by selecting some natural homogeneous targets with distances covering the entire distance scale of the TLS. The relationship in this study was validated by a case study of intensity correction and point cloud classification in an intertidal zone. Bolkas 39 corrected the intensity data for the incidence angle effect in a TLS based on the Torrance-Sparrow model. He scanned the target surfaces from various incidence angles for the assessment, and the targets were painted with eight different colors, creating different reflection characteristics. Tan et al. 40 concluded that the original intensity data obtained by TLSs are particularly influenced by distance and incidence angle effects, and the Lambertian cosine law is demonstrated to effectively correct the incidence angle effect. They proposed a new correction method to reduce the effect of distance on intensity data for TLSs.
Besides the modeling of intensity errors due to scanning geometry above, several studies are reported for qualitative analysis or statistical analysis of measurement errors due to scanning geometry for SCLSs. Soudarissanane et al. 41 focused on analyzing the influence of the laser incidence angle on the scanning point accuracy of a spherical coordinate system 3D laser scanner, and modeled the measurement noise strongly related to the incidence angle. They found that in typical indoor point clouds, 20% of the measurement noise is related to the incidence angle. However, the authors in Soudarissanane et al. 41 did not provide a corresponding compensation method for this error of the system. In 2011, Soudarissanane et al. 15 modeled the dependence of the measurement noise on ranges and incidence angles by analyzing the influence of these scanning geometry parameters on the signal to noise ratio. And they proposed to optimize measurement setups in such a way that the measurement noise can be minimized. Pexman and Robson 42 investigated the effectiveness of TLSs for high-precision inspection of aerospace components. They evaluated two TLS scanners and their limitations by using a mechanical jig, and focused on data capture, registration, and feature extraction. The authors achieved sub-millimeter registration accuracy, identifying a systematic offset in hole location due to the laser incidence angle, which can be accounted for during inspection. Based on industrial particle boards painted with eight different colors and two different sheens (flat and semi-gloss), Bolkas and Martinez 43 investigated how noise and plane residuals vary with the scanning geometry (i.e. the distances and the incidence angles) and the target color. They found that the darker colors, such as black and brown, can produce point clouds that are several times noisier than bright targets, such as white. Zámečníková et al. 44 performed an experiment in order to find how the incident angle influences the TLS distances and it is stochastic, systematic or a combination of both. They found a systematic effect of the incident angle at the distance of about 30 m, and concluded that the total variation of the distance difference with the incident angle is of approximately 2.0 mm. However, in their study, the stochastic properties of the influence of the incident angle could not be quantified for the TLS.
On the other hand, modeling the relationship between 3D coordinate errors of scanned surface points and scanning geometry may be often a more important and urgent task for SCLSs. Tan et al. 45 found that distance measurement errors of TLSs are strongly related to the original intensity values of the objects, and they presented an intensity-based method for correcting the distance measurement errors caused by target specular reflections. Thus, they established a connection between these two types of data in TLSs, which can be described as follow 45 :

where ΔD is the distance error, I is the surface intensity of object, N and
The above studies in this subsection shows that when scanning different object surfaces, the scanned intensities and 3D coordinate errors of different TLSs are affected differently by the scanning geometry. Although they did not provide a general error compensation model, the related research methods lay the foundation for modeling the correlation between intensities, 3D coordinates errors, and scanning geometry for objects of specific materials.
Working environment
The working environment factors including temperature, air pressure, humidity, and illumination are also important external non-instrumental error sources affecting the operation and accuracy of SCLS. At present, only a few studies have analyzed the impact of these factors.
Lemeš et al. 50 investigated the relationship between the ambient light intensity, the color of scanned surface, and the point cloud quality for a TLS. They demonstrated that the ambient light does have influence onto the point cloud accuracy, which is especially strong when scanning glossy white, yellow, and green surfaces. Kerekes 51 proposed a new stochastic model, Synthetic Variance Covariance Matrix (SVCM), for TLS observations. It categorizes errors into groups and examines their sources, including the errors incurred by mechanical and optical misalignments inside the instrument, air temperature, air pressure and vertical temperature gradient on TLS distances and vertical angles, object surface roughness, etc. Liu et al. 52 investigated the influence of humidity, temperature, and illumination on the scanning accuracy of TLS using a Leica HDS3000 TLS. They found that when the temperature ranged from 15 °C to 19.8 °C, the ambient humidity varied between 50.1% and 66.0%, and the illumination intensity was different in the morning and at noon, the RMS of ranging errors was within 2 mm at approximately 10 m.
Based on the analyses above, Table 2 provides a summary of non-instrumental and non-geometric error analysis studies of SCLSs, with the following key observations:
(1) Research on internal non-geometric errors in SCLSs is relatively scarce, primarily focusing on intensity errors caused by internal laser signal processing circuits and qualitative/quantitative analyses of the relationship between resolution and scanning errors. There is a significant lack of investigation into the internal non-geometric error mechanisms and the impact of these error factors on SCLS measurement accuracy.
(2) Most of the research results on internal non-geometric and external non-instrument errors of SCLSs are done for ToF-base TLSs, and there is very little research for MLRs. MLRs have higher measurement accuracy, and the effects of external non-instrument errors on measurement accuracy may be more serious.
(3) Among the studies on SCLS external non-instrument errors related to scanning geometry, object surface, and working environment, the discussions and analyses of external factors such as scan depth, incidence angle, surface color, and surface reflectance are relatively abundant. However, research on working environment factors such as temperature, air pressure, and illumination is scarce. Overall, statistical analysis and qualitative analysis are the predominant approaches in these studies, with limited research on error compensation models and calibration models for these error factors.
Conclusion
This review provides a comprehensive summary of existing research on internal non-geometric errors and external non-instrumental errors of SCLSs. External non-instrument errors are further categorized into three aspects: scanning geometry, object surface, and working environment. It is found that research on internal non-geometric errors in SCLSs mainly focuses on laser signal processing, but lacks investigation into error mechanisms and their impact on accuracy. Most studies are for Time-of-Flight (ToF)-based TLSs, with little focus on MLRs. External factors, like scan depth and surface reflectance, are well-studied, but environmental factors like temperature receive less attention, with limited research on error compensation models.
Based on the review in this paper, the future research work may include:
(1) Conduct qualitative and quantitative experimental analyses to investigate the impact of various external non-instrument error factors on the measurement accuracy of MLRs.
(2) Develop error compensation models for external non-instrument error factors affecting the measurement accuracy of MLR for specific high-precision large-scale measurement applications, such as aircraft manufacturing, considering specific material surfaces (e.g. aircraft surfaces).
(3) Further analyze the impact of the working environment on TLSs and MLRs.
(4) Based on the error analysis results of external non-instrument error factors affecting the instrument accuracy, the future research could focus on optimizing the MLR station locations for different measured objects, thereby minimizing the impact of external error factors on scanning measurement accuracy.
(5) Evaluate uncertainties of TLSs and MLRs based on large-scale standard scanning objects.
The first four future research directions are crucial for addressing how to minimize errors caused by factors such as surface characteristics and the working environment.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Civil Aircraft Special Scientific Research Project (MJ-2018-J-70) initiated by the Ministry of Industry and Information Technology, China, and partially supported by the National Natural Science Foundation of China under Grant 62373339 and Zhejiang Provincial Natural Science Foundation of China under Grant No. LZ24F030007.
Ethical statement
This review does not involve human or animal subjects, and therefore, no ethical approval is required.
Informed consent/patient consent
This article is a review, and does not contain any studies with human or animal participants.
Trial registration number/date
This article does not contain any trials.
Data availability statement
The datasets generated and analyzed during the current study are not publicly available due the data also forms part of an ongoing study but are available from the corresponding authors on reasonable request.