
Abstract
In the present paper, addressing the challenges of model uncertainty, actuator faults, and wind disturbances in quadrotor UAV formation systems, this study proposes an adaptive super-twisting integral terminal sliding mode control (ASTITSMC) strategy. This strategy integrates the “leader-follower” formation control approach with adaptive parameter adjustment to optimize the sliding mode controller, effectively estimating the upper bound of unknown disturbances and ensuring system stability. Additionally, based on the leader-follower structure, we design a distributed adaptive event-triggered formation control protocol that does not rely on global network information, thus reducing computational load and conserving communication resources, while strictly proving the avoidance of the Zeno phenomenon. Analysis based on Lyapunov stability theory demonstrates that the proposed algorithm ensures the convergence of the multi-UAV formation tracking error to zero. Simulation results indicate that the proposed control algorithm performs superiorly in terms of fault tolerance compared to two other algorithms and exhibits stronger robustness.
Keywords
Introduction
In recent years, quadrotor unmanned aerial vehicles (UAVs) have received significant attention due to their advantages of high flexibility, strong maneuverability, and low operational costs, leading to widespread applications in fields such as aerial photography, forest firefighting, and military operations.1,2 However, with the increasing complexity of application scenarios and the evolving nature of future battlefields, a single UAV often fails to meet the demands of complex missions.3,4 Consequently, coordinated control of multiple UAV formations, leveraging collective intelligence and collaborative operations, has been highlighted to enhance mission efficiency, improve system, robustness, and adaptability. This approach is suitable for emergency responses, large-scale surveillance, and precise strike missions in complex environments, representing a future development trend. 5 Currently, prevalent methods for UAV formation control include leader-follower schemes, 6 behavioral approaches, 7 virtual structure methods, 8 artificial potential fields, 9 and graph theory methods. 10 Despite the critical importance of quadrotor UAV formation systems in both military and civilian domains, several control challenges remain unresolved, with the aim of enhancing real-time collaboration and adaptability in complex environments to ensure efficient and safe mission execution.
Implementing a multi-quadcopter cooperative formation requires addressing two practical issues. First, as quadcopters primarily operate in outdoor environments, they are inevitably affected by airflow, wind speed variations, and other meteorological factors. 3 These external disturbances can cause deviations from the intended flight path, impacting the formation’s stability and accuracy. Second, prolonged flight can lead to aging or damage of the quadcopter’s propellers, resulting in actuator faults. 11 Such faults not only affect the performance of individual UAVs but can also disrupt the overall stability and coordination of the formation. Addressing both of these issues comprehensively is crucial for the effectiveness of UAV formation systems.
Zhu et al. 12 and Huang et al. 13 propose a method combining observers and sliding mode control to address the attitude tracking problem of quadcopters, overcoming model parameter uncertainties and external disturbances. Additionally, Song et al. 14 presents a comprehensive sliding mode control scheme that integrates adaptive laws and pole placement control to enhance the robustness and stability of quadcopters. Furthermore, Yu et al. 15 introduces an integral backstepping anti-disturbance control strategy to optimize the tracking accuracy and disturbance rejection performance of quadcopter attitude angles. However, the above literature primarily addresses control issues when quadrotor UAVs are affected by external disturbances and does not consider the impact of actuator faults. In this regard, Baek and Kang 16 employs adaptive dynamic programming and radial basis function neural networks to enhance the tracking control performance of quadcopters under disturbances and actuator faults. Li et al. 17 proposes an adaptive fault-tolerant control method based on output feedback to ensure stable flight of quadrotor UAVs in the presence of actuator faults. Gong et al. 11 addresses actuator fault detection and compensation issues for quadcopters by proposing a finite-time fault-tolerant control scheme. This approach achieves precise position and attitude tracking while simplifying the control algorithm and pre-allocating stability time.
However, the aforementioned studies only address fault tolerance in single quadrotor UAVs. Further research is needed to achieve safe and stable flight in quadrotor UAV formation control under external disturbances or actuator faults. In this context, Zheng et al. 18 proposes a robust fixed-time method for formation control of underactuated, nonlinear quadrotor UAV groups, achieving convergence in UAV position tracking and attitude stability through distributed fixed-time sliding mode estimators and disturbance observers. Li et al. 19 introduces a consensus flight control method for multiple quadrotor UAV formations considering wind disturbances and time delays, effectively managing the impact of wind disturbances on formation stability. Ullah et al. 20 presents a fractional-order adaptive robust control method for multi-UAV formation systems with parameter uncertainties and gust disturbances, ensuring stable formation flight. However, the aforementioned literature does not address actuator fault issues. In response, Wang and Luo 21 tackles the control problems of multi-quadcopter formations under disturbances, coupling factors, and actuator faults using an extended state observer and a fast terminal sliding mode fault-tolerant controller, ensuring robust fault tolerance performance. Miao et al. 22 proposes a solution based on an augmented timed observer and a distributed sliding mode controller to address formation control problems in quadcopters with actuator faults. This approach achieves precise speed tracking and fault compensation, and its effectiveness is validated through hardware testing.
However, the above works are based on traditional time-triggered mechanisms, which involve substantial amounts of redundant and ineffective data processing, leading to inefficient use of computational resources. 23 Therefore, reducing computational burden while ensuring control performance has become a focal point in current research. Event-triggered mechanisms have garnered widespread attention and thorough investigation as a means to alleviate this burden.24,25 Traditional event-triggered approaches employ fixed thresholds, triggering only when tracking errors exceed predefined thresholds. While effective in reducing trigger occurrences and computational load, fixed thresholds lack flexibility. To address this issue, dynamic threshold-based event-triggered strategies have been extensively explored. 26 These dynamically adjust with changes in system states. For example, Yao et al. 27 utilizes a robust adaptive event-triggered sliding mode control method to successfully achieve adaptive tracking control for nonlinear multi-agent systems subject to unknown disturbances and limited network bandwidth. Zhou et al. 28 introduces dynamic event-triggered mechanisms, successfully achieving stable control and consensus tracking for high-order nonlinear multi-agent systems. Thus, reducing computational burden and conserving communication resources in quadrotor UAV formation control constitutes a key focus of this study.
Although extensive research has been conducted on the control of quadrotor UAVs in complex environments, studies that simultaneously address the impact of model uncertainty, external wind disturbances, and actuator faults on quadrotor systems, and achieve distributed formation control based on adaptive event-triggering, remain relatively scarce. Inspired by the aforementioned literature, and to simultaneously address the comprehensive uncertainties such as model uncertainties, external wind disturbances, and actuator faults in quadcopter formation control while improving the drawbacks of traditional time-triggered computation methods, this paper adopts a leader-follower structure and proposes a distributed adaptive event-triggered formation fault-tolerant control scheme. This approach ensures the safety of UAV formation flight and is validated through comparative simulations to demonstrate the effectiveness of the proposed design. The primary contributions of this paper are as follows:
(1) Breakthrough in Multi-UAV Formation Control: Unlike existing studies11–17 which focus solely on the tracking of individual quadrotor UAVs, this paper considers the formation control of multiple quadrotor UAVs. A distributed adaptive triggering formation control protocol is utilized, where each UAV makes decisions based on information from neighboring UAVs, updating its position and velocity online. This reduces reliance on global information while achieving stability.
(2) Optimization of Communication Resources and Computational Burden: Although literature Zheng et al., 18 Li et al., 19 Ullah et al., 20 Wang and Luo, 21 and Miao et al. 22 discuss formation control of multiple quadrotor UAVs, the distributed adaptive event-triggered formation control protocol designed in this paper can save communication resources and reduce computational burden without compromising system performance, compared to the time-triggered computation methods used in those references.
(3) Proposal of a Comprehensive Fault-Tolerant Control Method: Unlike the existing literature that considers only faults or disturbances individually, this paper addresses the combined impact of model uncertainties, actuator faults, and wind disturbances on quadcopter formations. It designs an adaptive super-twisting integral sliding mode fault-tolerant control method, employing adaptive laws to estimate the upper bound of lumped disturbances, enabling the formation to track the desired trajectory within a finite time. Comparative numerical simulations with the methods proposed in Xiu et al. 29 and Eliker and Zhang 30 show that this approach exhibits stronger robustness.
The organization of this work is as follows. Section “Preliminaries and problem formulation” introduces some preliminary knowledge and the dynamics model of quadcopters. Section “Distributed adaptive event-triggered formation cooperative control” presents the distributed formation controller and stability analysis. Section “Follower quadrotor UAV ASTITSMC design” focuses on the control algorithm design and stability analysis for follower UAVs. Numerical simulations and experimental results are provided in Section “Analysis of simulation results” to demonstrate the effectiveness of the developed formation control algorithm. Section “Conclusions” concludes the paper.
Preliminaries and problem formulation
Communication topology
Consider an undirected graph
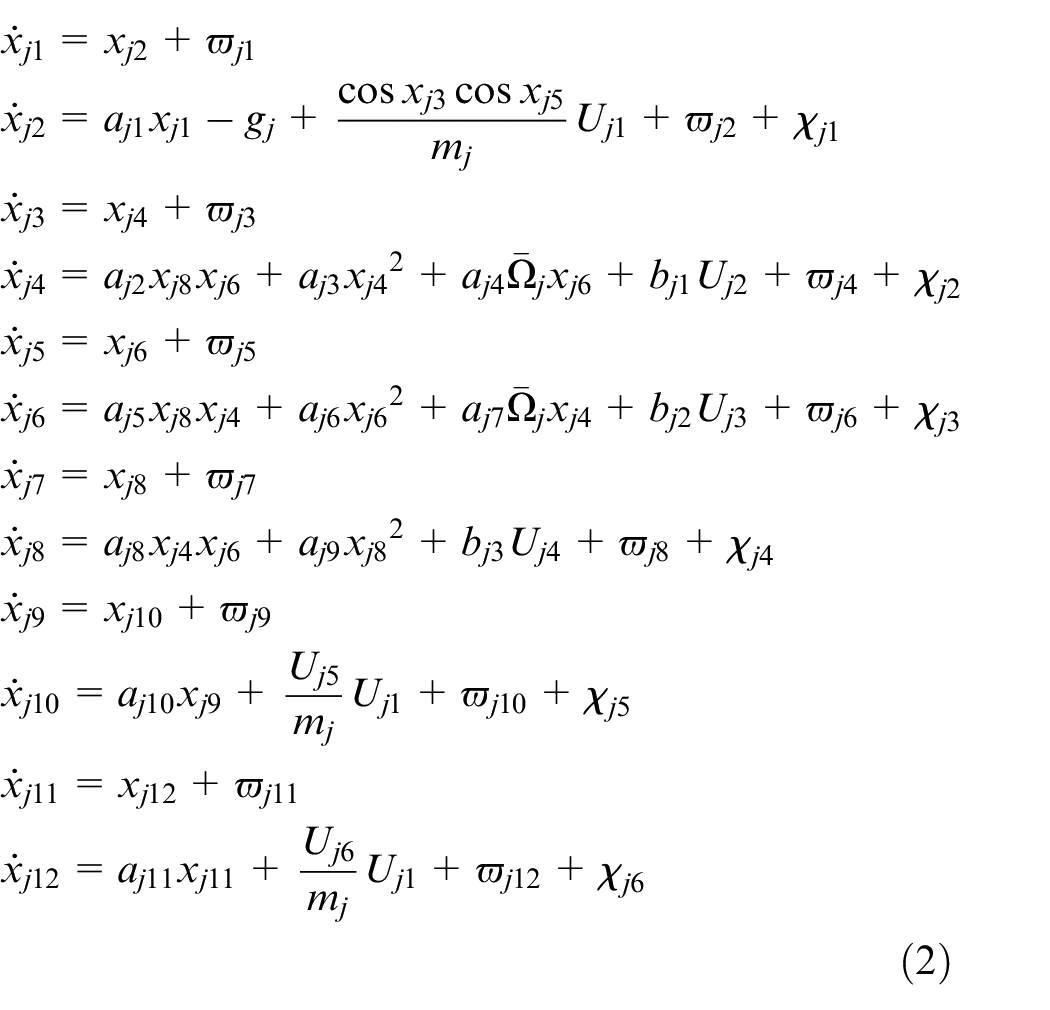
Description of the four-rotor UAV dynamics model
The quadrotor UAV is modeled as a rigid body, with the assumption that its geometric center aligns with the center of mass, and the air resistance is ignored. As depicted in Figure 1, the inertial coordinate system
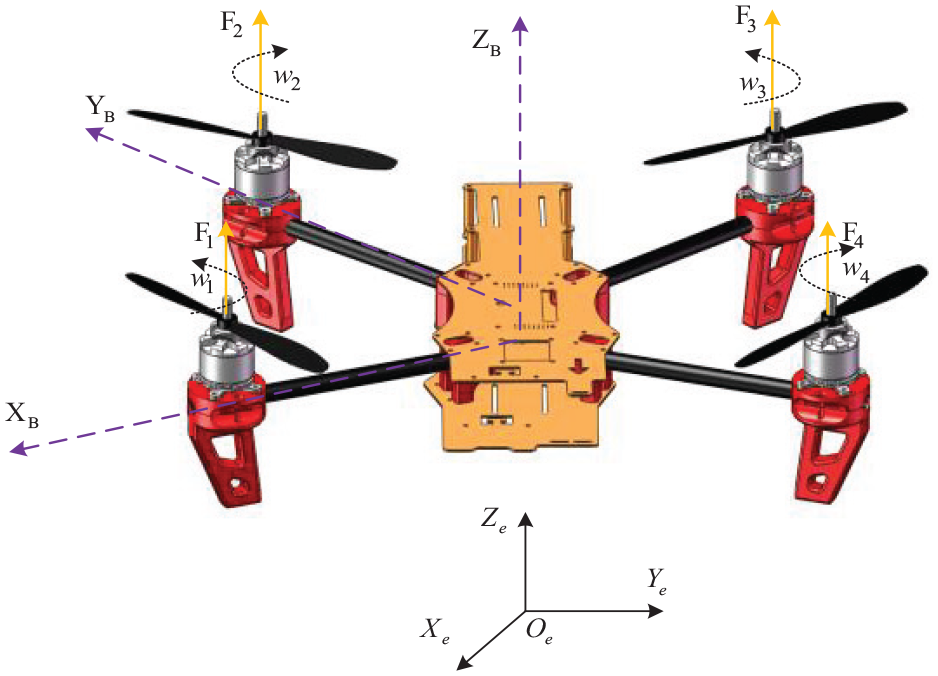
Schematic diagram of the structure of the quadrotor UAV.
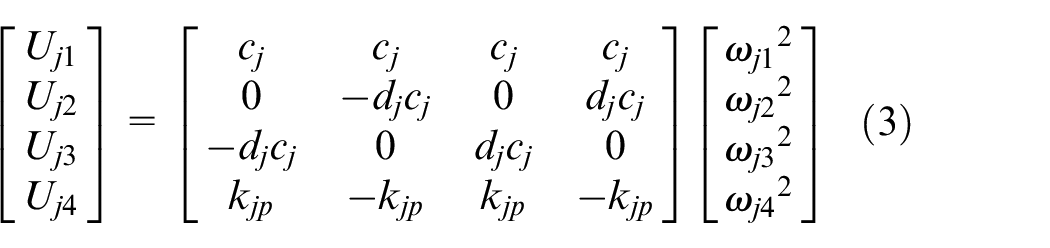
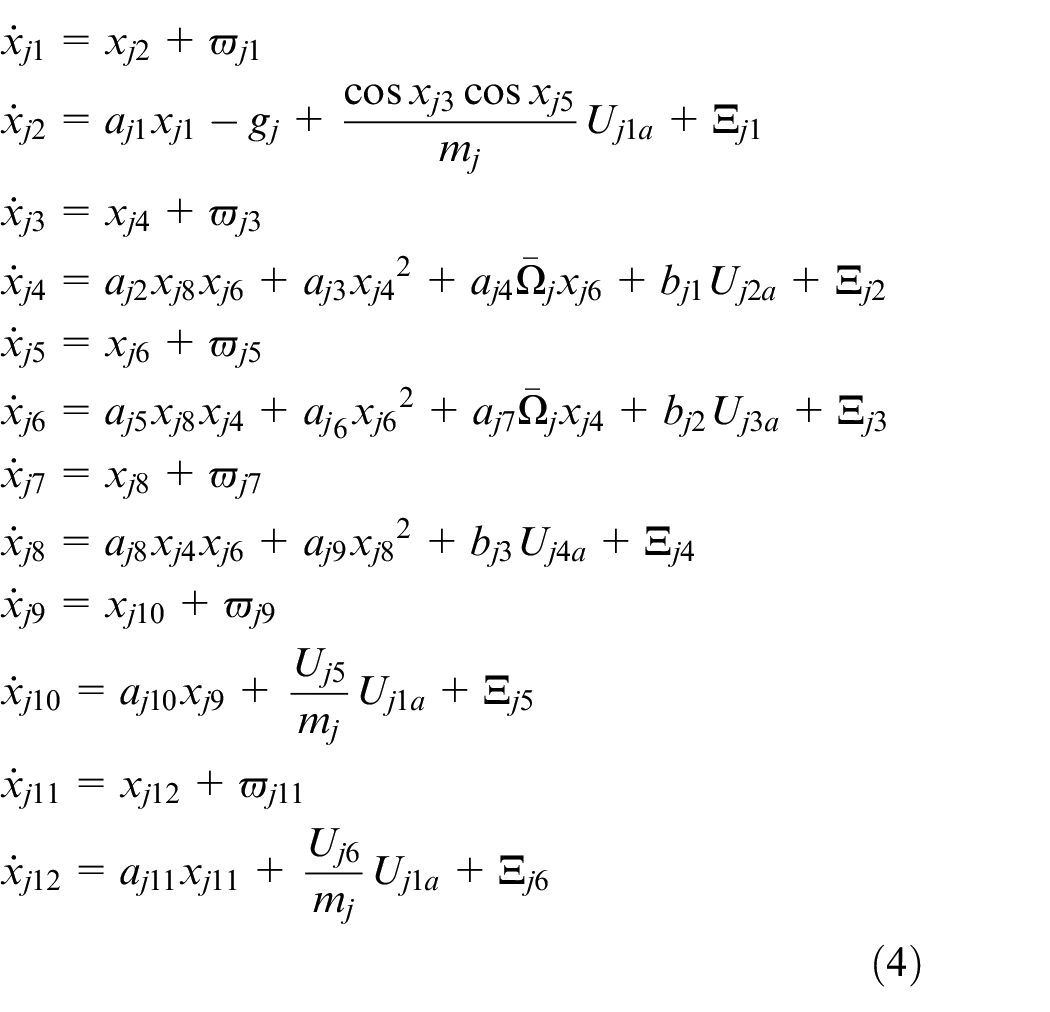
Firstly, the actuator fault model is introduced:

In the equation,
In the equation,
Additionally, there is
In the equation,
With
Control objectives
In the realm multi-quadrotor UAV formation system operating under an undirected communication topology, this study introduces an advanced fault-tolerant adaptive super-twisting integral terminal sliding mode controller. This innovative control scheme is designed to ensure stable trajectory tracking for follower quadrotor UAVs in the presence of wind disturbances and actuator faults. Follower units within the formation are programmed to derive their requisite positional data from the overall formation structure as well as real-time directives issued by a designated virtual leader UAV. This algorithm empowers each follower UAV to recalibrate its position and velocity autonomously, drawing upon the dynamic state data of adjacent UAVs within the network. This sophisticated mechanism promotes a robust cooperative control environment, meticulously orchestrating the collective aerial maneuvers required to fulfill the stipulated formation flight objectives.
Let
Distributed adaptive event-triggered formation cooperative control
Controller design
For clarity and ease of understanding in the forthcoming discussions, several foundational assumptions, and lemmas are stipulated:
The architecture of the distributed adaptive event-triggered cooperative control for multi-quadrotor UAV is depicted in Figure 2.
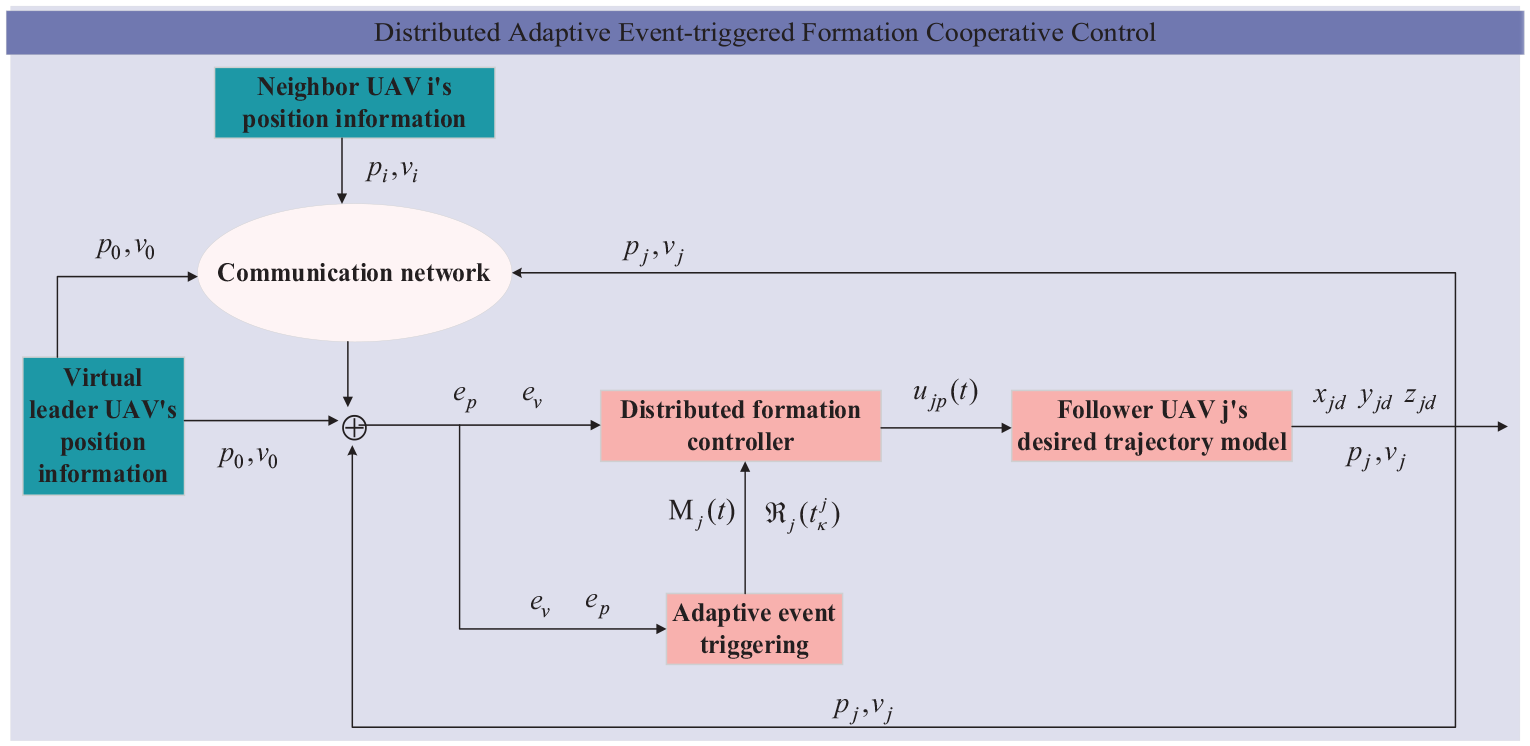
Distributed event-triggered formation control block diagram.
In order to realize the synchronized flight of the virtual leader UAV alongside the follower UAV, which subjected to external disturbances and actuator failures, according to the expected formation trajectory, the expected trajectory model is given

Where,

To ensure the desired formation flight, a distributed adaptive event-triggered formation control law has been designed
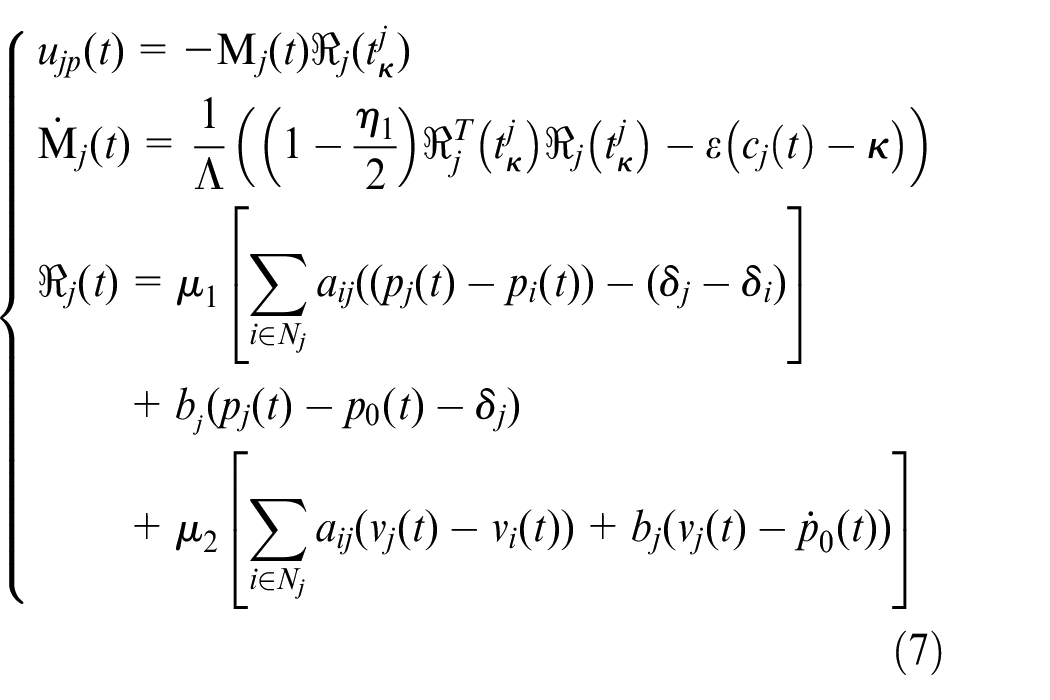
Where is the coupling strength of
To facilitate the analysis, define
The terms

Where,

Where,
Where
Where,
Additionally,
We choose
There is
Where
There’s

Where

From this we verify that

Admissibility of triggering condition
The sequence of triggering moments is represented by the monotonically increasing sequence
and we have
According to Assumptions 2 and 3, for analytical convenience, we assume
Consequently:

From the application of the comparative lemma as outlined in Khalil, 34 we obtain:

According to triggering condition (9), it is evident that the boundary of the sample error

Where there are

Due to the presence of term
Follower quadrotor UAV ASTITSMC design
Super-twisting integral sliding mode surface design
First, we define the tracking error of the j-th follower quadrotor UAV as

In equation (28),
To achieve finite-time convergence of the tracking error, the super-twisting integral sliding mode surface for the j-th follower quadrotor UAV is designed as follows:

Where






Where
Where
Where there exists

We differentiate equation (30) to obtain

Based on equation (3), by substituting equations (30), (31) to (36) into equation (39), we obtain
ASTITSMC design
Let
In the configuration, constants
When applied in practical scenarios, the precise upper limit of parameter

Therefore, we design the adaptive law for the j-th follower UAV as follows:

Where
Here,
Therefore, combining equations (46) to (51) and equations (54) through (59), we obtain the adaptive super-twisting integral terminal sliding mode controller for the j-th follower UAV.
Where

We differentiate the above equation, and given the existence of

Upon substituting equations (39) through (44), as well as equations (52) and (53), into equation (67), we derive:
By substituting equations (60) through (65) into equations (68) through (73) and conducting a subsequent simplification, we derive:
From equation (52) and through detailed simplification, we obtain:
According to the Lyapunov stability condition, it is confirmed that the designed controller is stable. This implies that the tracking error of the system can converge to the verification. The overall control block diagram illustrating this process is depicted in Figure 3.
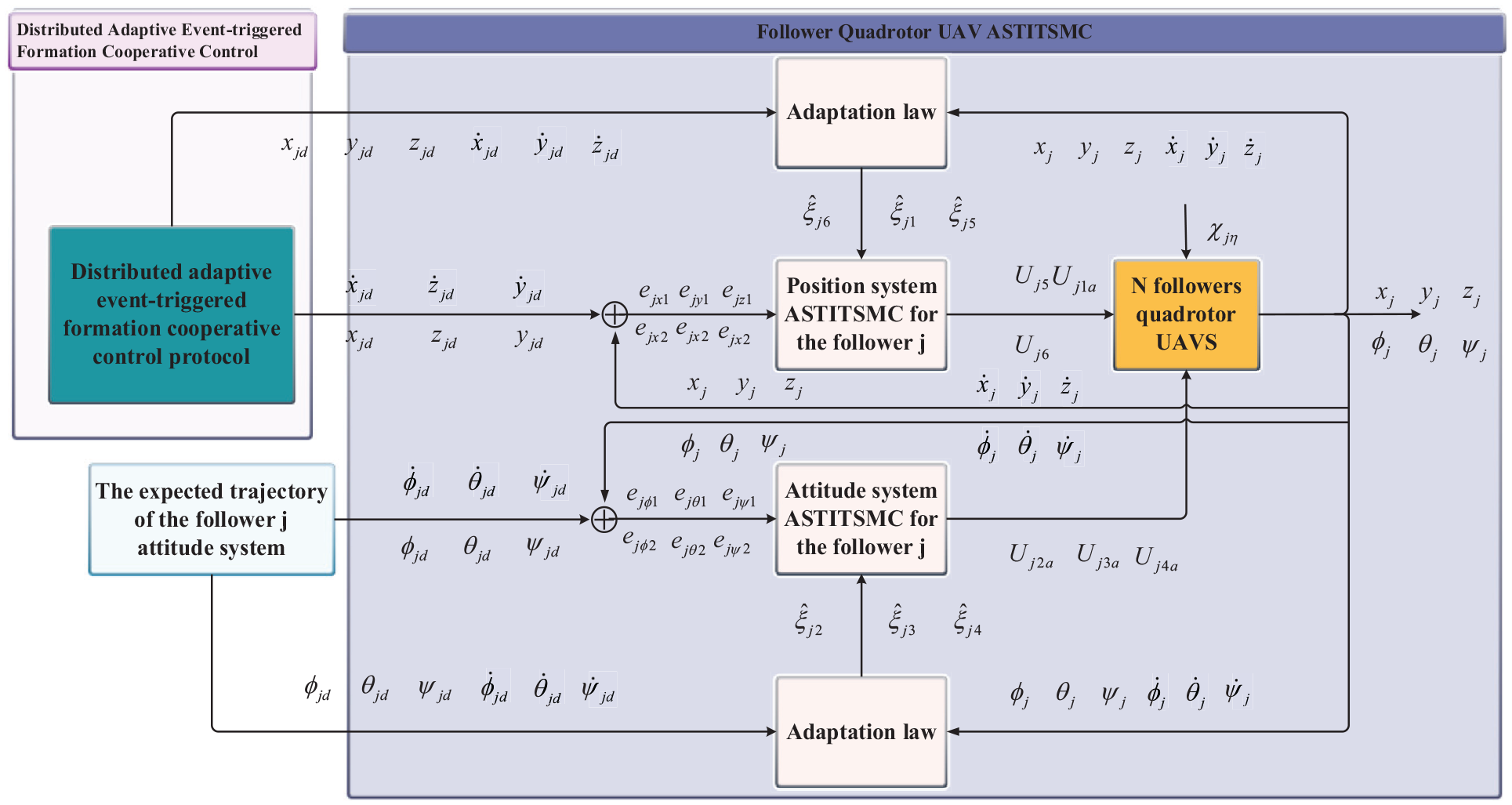
Block diagram of adaptive super-twisting integrating terminal sliding mode control for multi-quadrotor UAV based on leader-follower configuration.
Analysis of simulation results
Simulation parameters
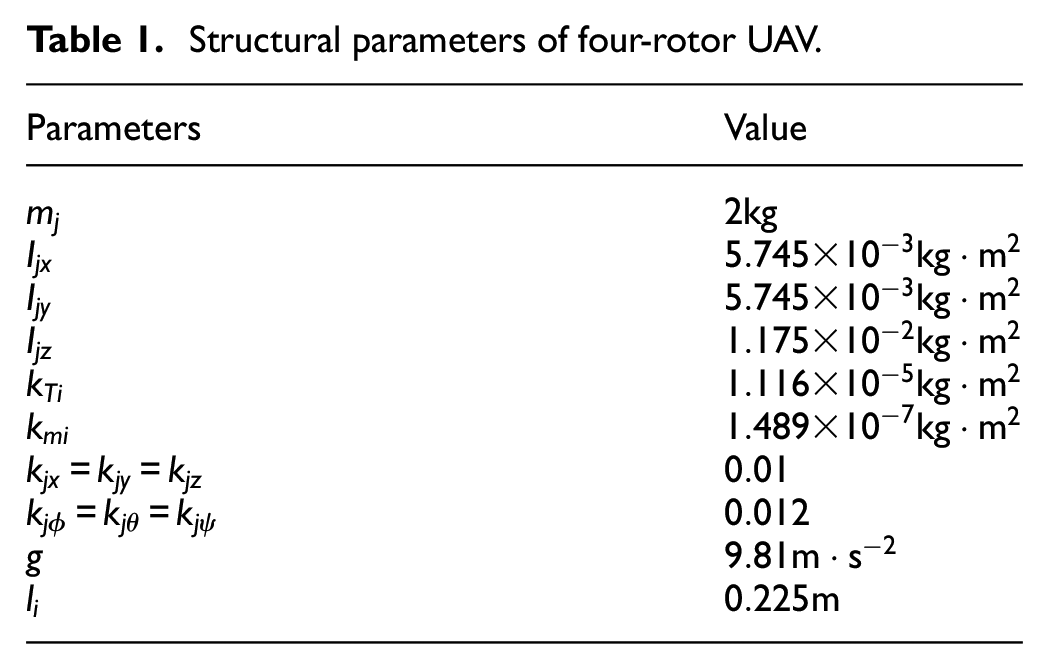
To validate the effectiveness of the newly designed control algorithm designed, a detailed simulation was conducted on a MATLAB platform, establishing a multi-quadcopter UAV formation system. Uniformity in system parameters across all UAVs in the formation ensures consistency in the simulation environment, thereby enabling a focused evaluation of the control strategy’s performance. The structural parameters, which are critical to the dynamics and behavior of the UAVs, are meticulously listed in Table 1.
Structural parameters of four-rotor UAV.
The fault-tolerant control simulation described in this paper involves a configuration comprising one virtual leader UAV and three follower UAVs. Figure 4 depicts the communication topology utilized among the UAV within the formation.
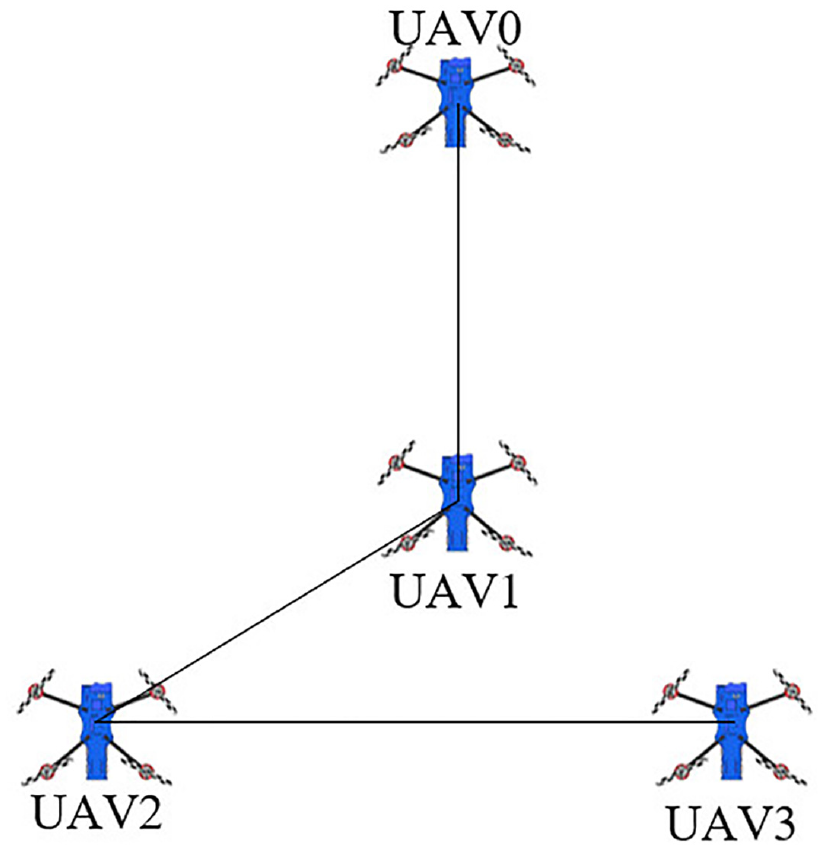
Topology structure of UAV formation communication.
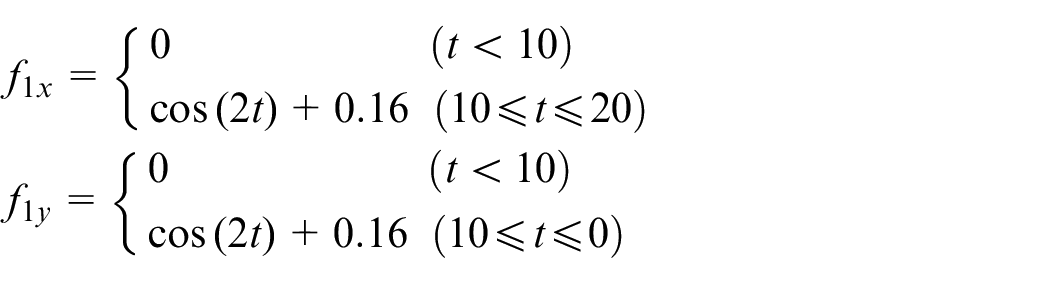
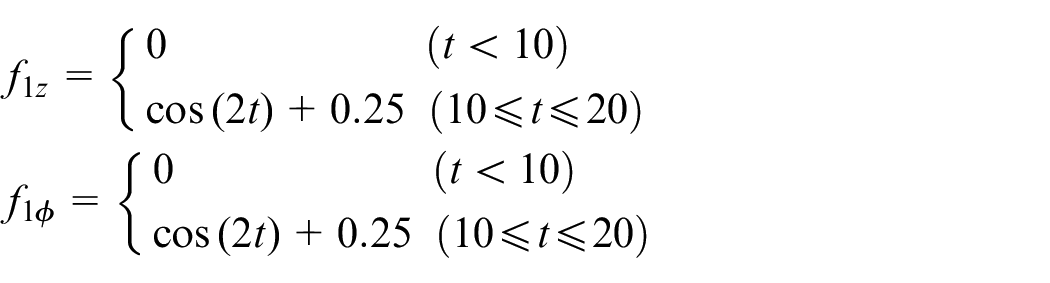
In this simulation scenario, Follower UAV 1 is specifically designated to encounter both wind disturbance and actuator faults simultaneously at 10 s, collectively termed as “aggregate disturbance.” The specific parameters are outlined as follows.
The fault-tolerant control algorithm for the multi-UAV formation designed in this paper is divided into two primarily parts: a distributed self-adaptive event-triggered cooperative controller and an adaptive terminal sliding mode controller. The specific parameters designated for the formation cooperative controller are
For the adaptive integral terminal sliding mode control of the follower UAVs, the parameters are precisely set as
It is noteworthy that the parameters for the aforementioned controllers are selected through a trial-and-error method, where different choices significantly influence the control performance. For instance, within the distributed formation coordination controller, parameters
Numerical simulation results of distributed adaptive event-triggered formation cooperative control
We set the relative position offsets as
Figure 5 depicts the three-dimensional desired trajectory curve for formation cooperative control. Figures 6 to 8 show the relative distance error curves between the virtual leader and the three followers. Figures 9 to 11 display the relative velocity error curves between the virtual leader and the three followers. Figure 12 illustrates the event-triggering time intervals. From Figures 5 to 12, it can be observed that the designed distributed cooperative control protocol can achieve the generation of desired trajectories for quadcopter UAV formations, and Figure 12 indicates that this can be achieved with fewer computational resources.
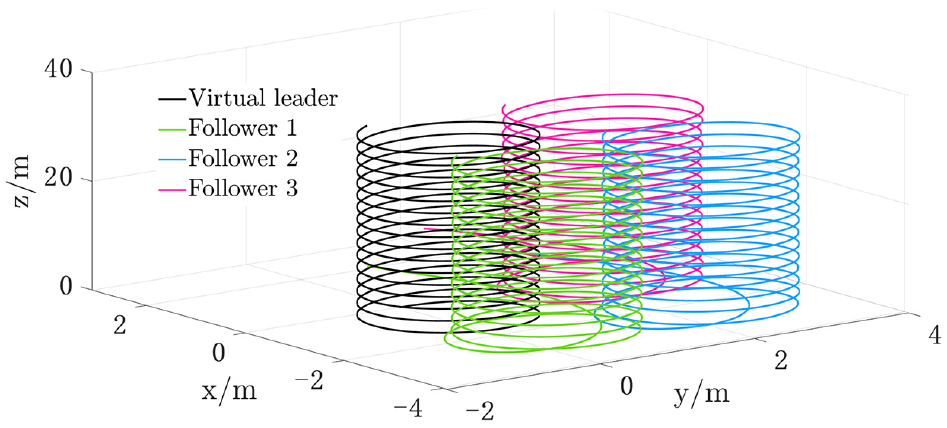
Formation cooperative control of 3D desired trajectory curve.
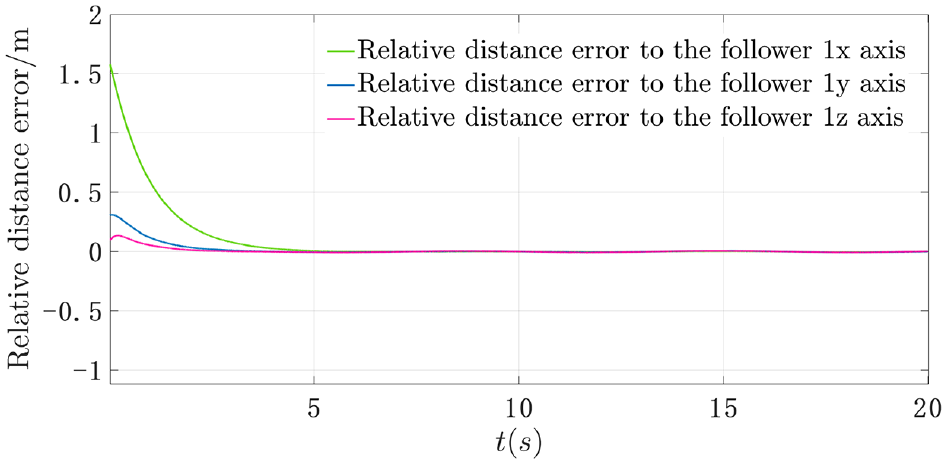
Virtual leader and follower 1 relative distance error.
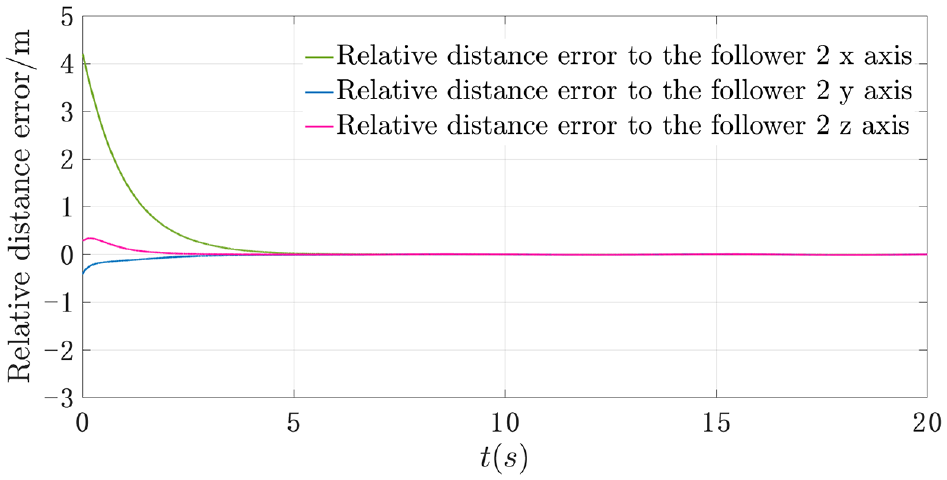
Virtual leader and follower 2 relative distance error.
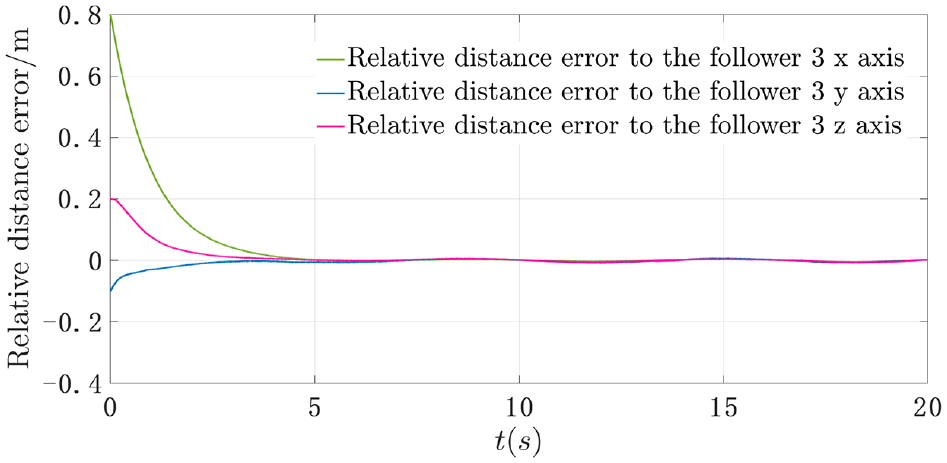
Virtual leader and follower 3 relative distance error.
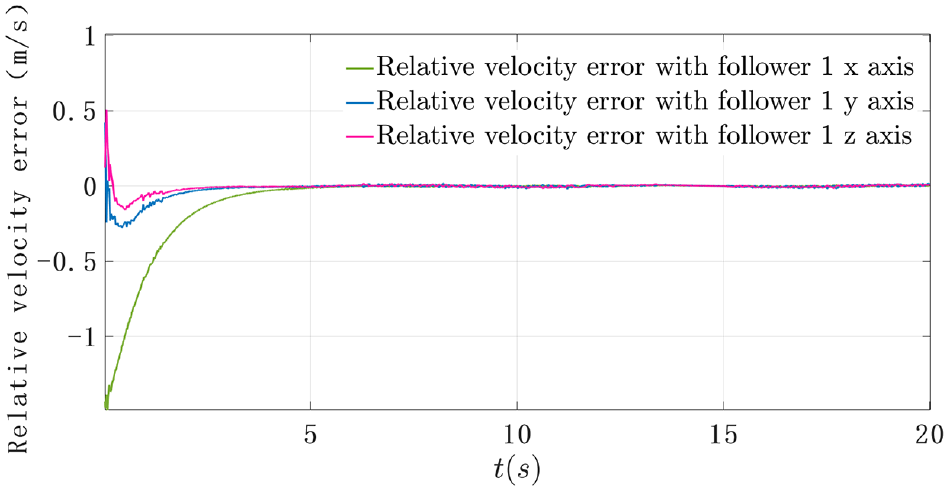
Virtual leader and follower 1 relative speed error.
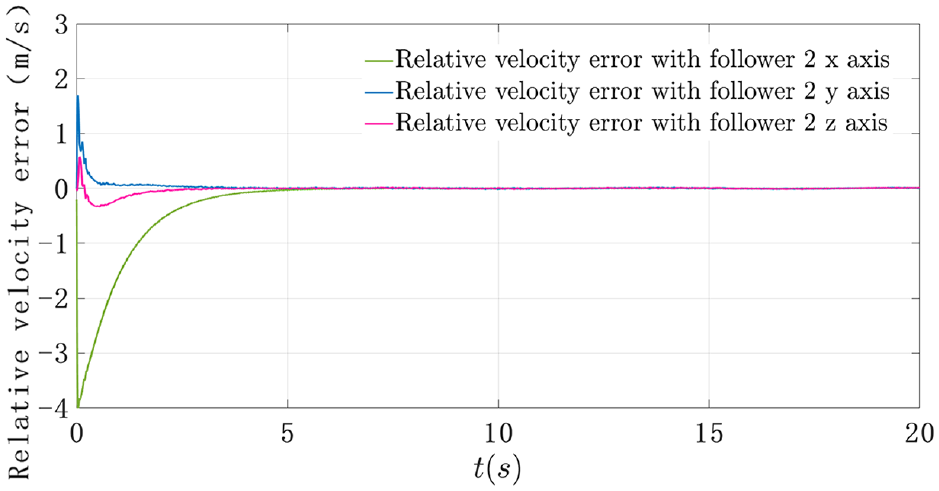
Virtual leader and follower 2 relative speed error.
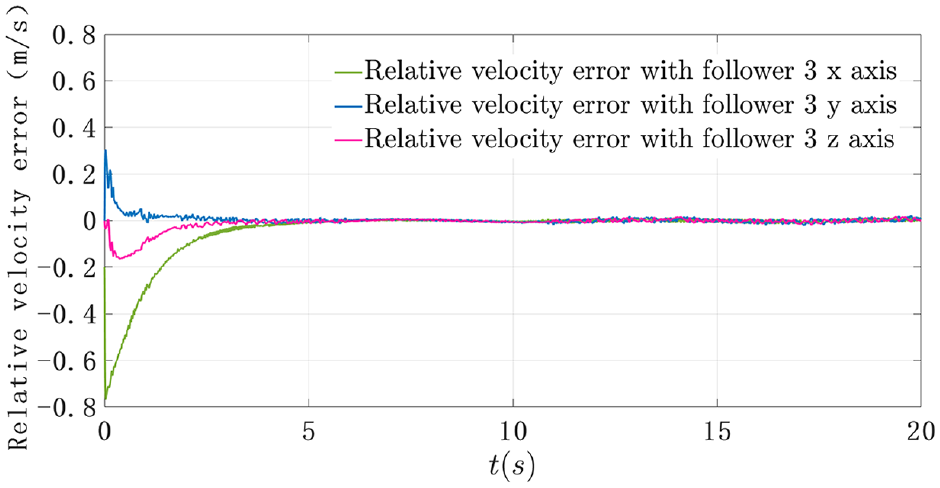
Virtual leader and follower 3 relative speed error.
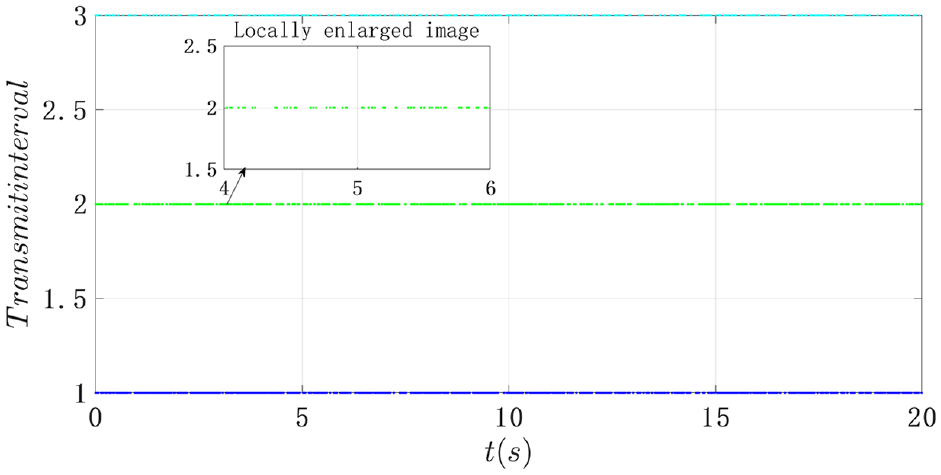
Event triggering interval.
Numerical simulation results of fault-tolerant control of the follower quad-rotor UAV
To validate the performance advantages of the follower UAV adaptive super-twisting integral sliding mode control (ASTITSMC) algorithm, numerical simulations were conducted comparing Algorithm 1 from Xiu et al. 29 and Algorithm 2 from Eliker and Zhang. 30 The position tracking of follower UAV 1 is shown in Figures 13 to 15. From the figures, it can be observed that initially, there is no significant difference in convergence speed between ASTITSMC and the comparative algorithms. However, at time t, when the UAV is simultaneously affected by gust disturbances and actuator faults, although all three control methods converge to the desired values, zooming into the graphs reveals that ASTITSMC exhibits smaller overshoot and errors compared to the other two algorithms. It achieves faster convergence and precise tracking of the desired trajectory, demonstrating strong robustness. Figure 16 illustrates the three-dimensional trajectory tracking curves, where it can be seen that ASTITSMC outperforms the other two algorithms in terms of higher tracking accuracy and stronger disturbance rejection capabilities.
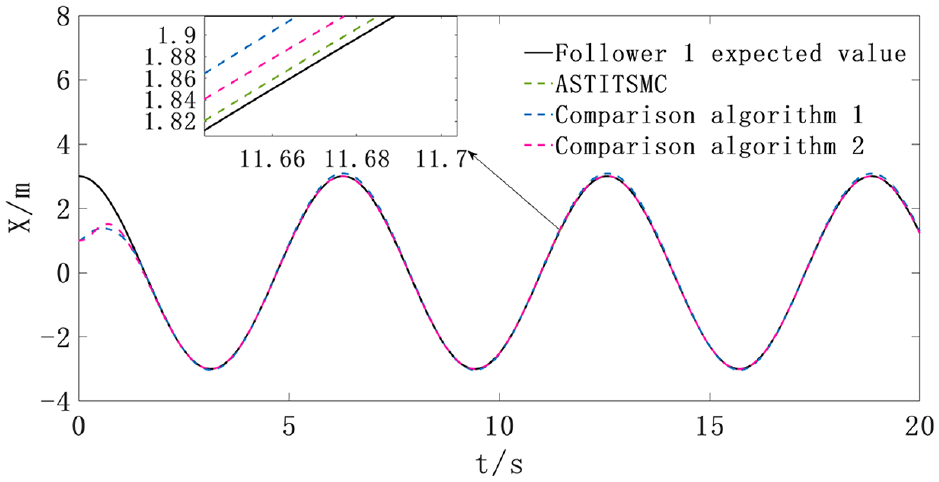
Position x tracking curve.
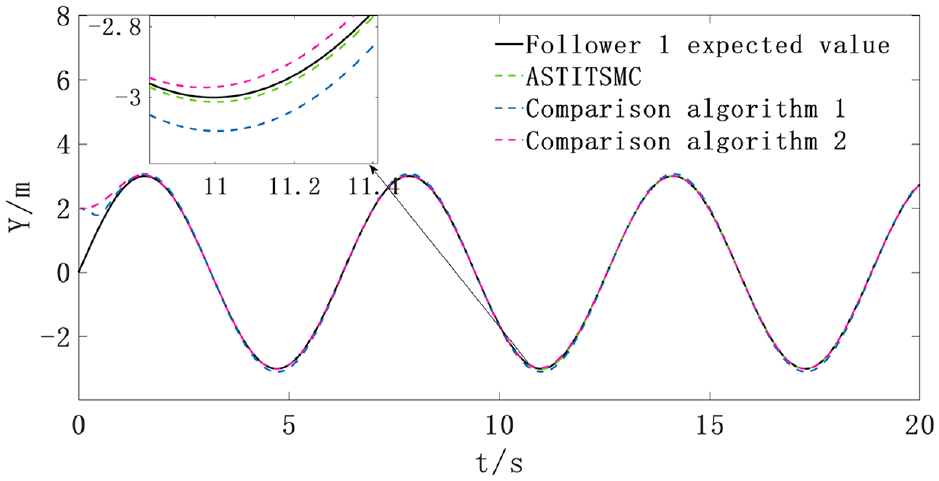
Position y tracking curve.
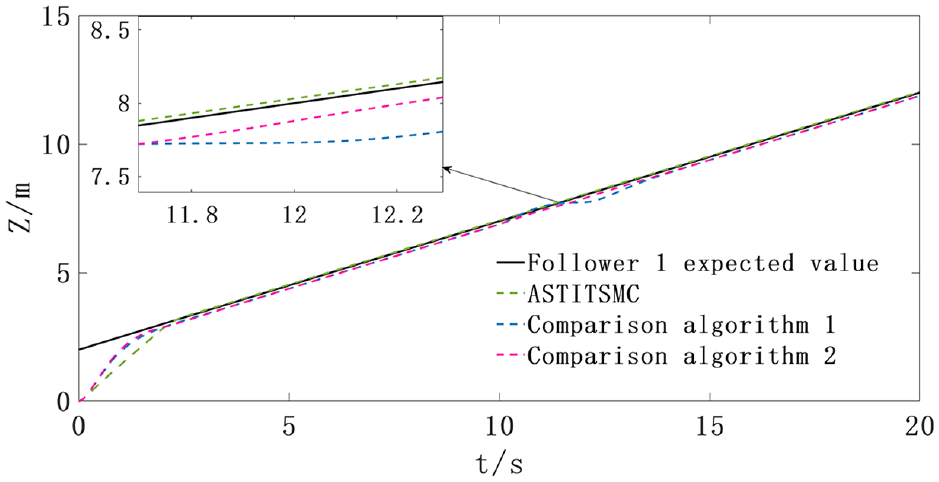
Position z tracking curve.
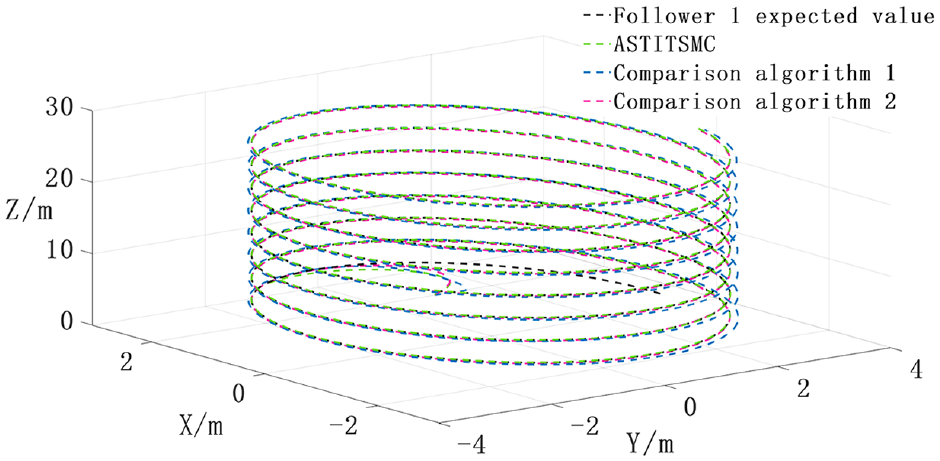
3D tracking curve.
The attitude angle tracking of follower UAV 1 is shown in Figures 17 to 19. From the graphs, it is evident that initially, although the two comparative algorithms converge quickly, they exhibit noticeable overshoot. In contrast, ASTITSMC shows smaller overshoot. At 10 s, when follower UAV 1 experiences gust disturbances and actuator faults simultaneously, ASTITSMC demonstrates stronger robustness compared to the two comparative algorithms. It effectively compensates for disturbances and faults, achieving faster convergence and smaller errors, thereby enabling precise tracking of the desired trajectory.
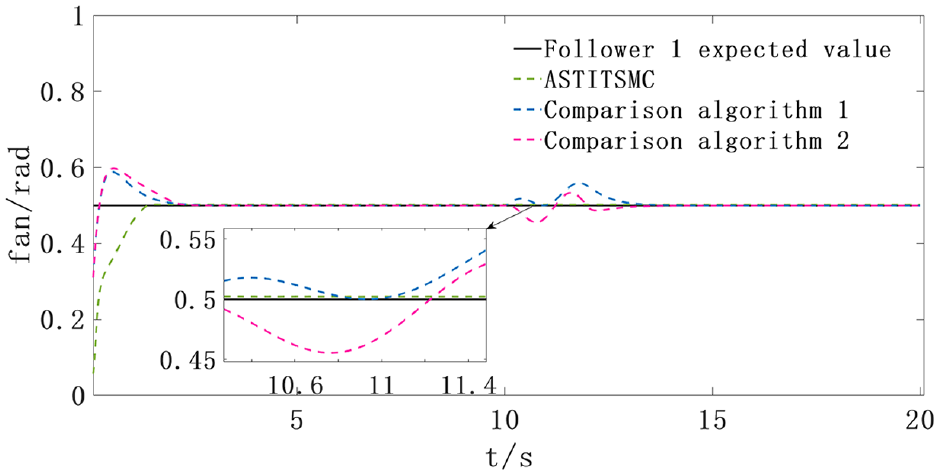
Tracking curve of
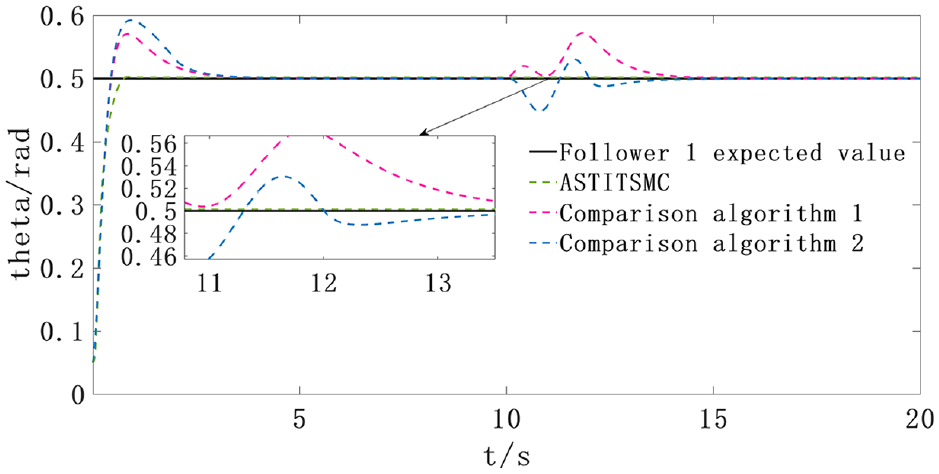
Tracking curve of
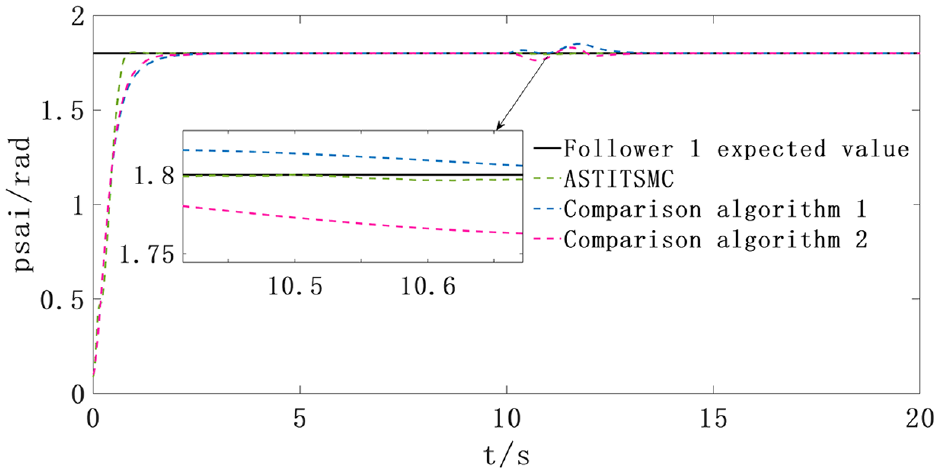
Tracking curve of
The adaptive law parameter estimation for the position and attitude of follower UAV 1 is shown in Figure 20. From the figure, we observe that initially, the parameter estimation values converge rapidly to a constant, ensuring that the UAV effectively tracks the desired trajectory. When follower UAV 1 encounters external disturbances and actuator faults simultaneously, the adaptive law adjusts the parameter estimation values to another constant through active adaptation. This allows estimation of the upper bound of aggregate disturbances, thereby enhancing system robustness and maintaining good tracking performance of the UAV.
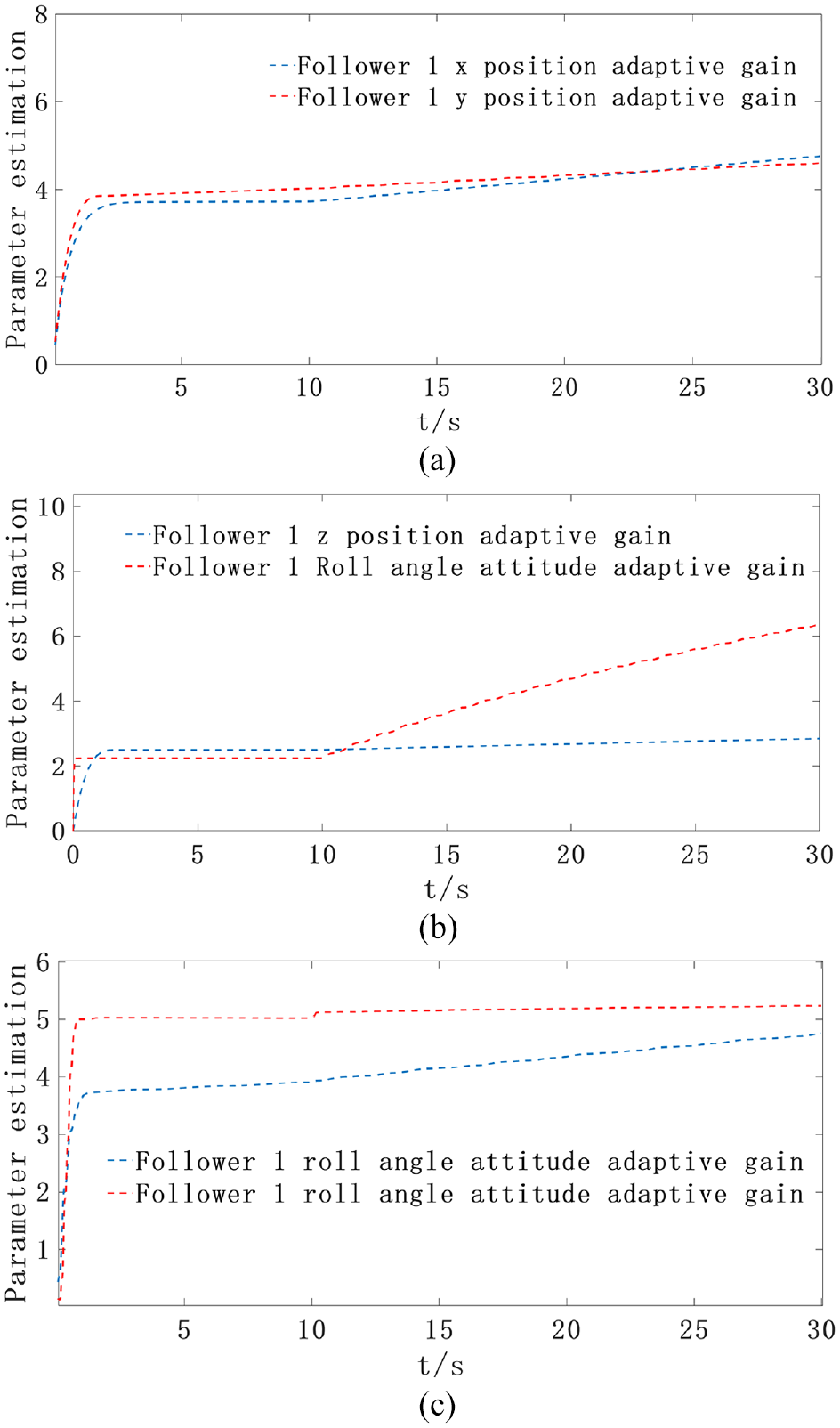
Adaptive parameter estimation curve: (a) estimate of parameter
The UAV formation flight tracking trajectory is depicted in Figure 21. From the figure, it can be observed that the designed leader-follower distributed event-triggered formation coordination control protocol provides real-time updates of positions to the follower UAVs. Additionally, the designed follower UAV adaptive super-twisting integral terminal sliding mode control algorithm achieves precise tracking of desired trajectories, enabling formation coordination control.
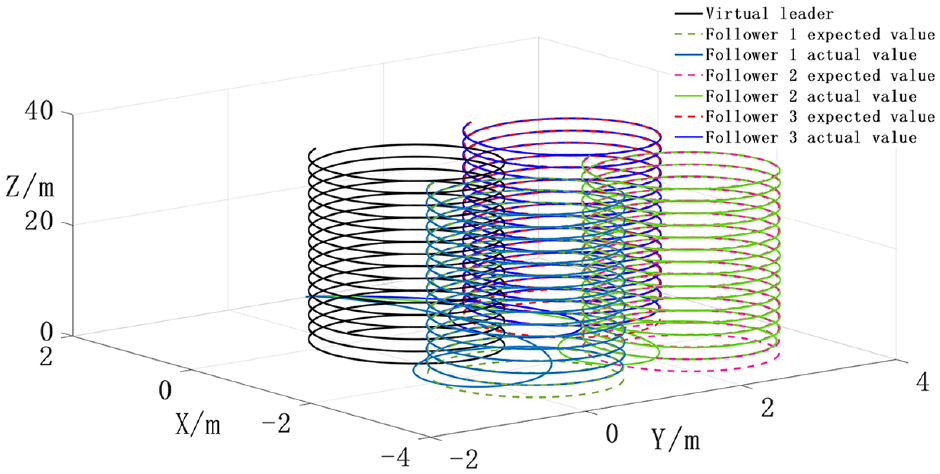
Formation flight trajectory curve.
Conclusions
This paper addresses the problem of tracking control for multi-quadcopter formations in the presence of model uncertainties, wind disturbances, and actuator faults. We have designed an adaptive super-twisting integral terminal sliding mode controller (ASTITSMC), which estimates the upper bound of aggregate disturbances through an adaptive law, enabling the quadcopters to effectively track the desired trajectory within a finite time despite actuator faults and external disturbances. The stability of the controller is thoroughly analyzed, and the performance of ASTITSMC is compared with two other control algorithms in actual flight scenarios. Simulation results demonstrate that the ASTITSMC controller exhibits significant advantages in both performance and adaptability, effectively guiding quadcopter formations through complex flight tasks. Additionally, a distributed adaptive event-triggered formation coordination control protocol is proposed. This protocol does not rely on global information and significantly improves convergence speed and reduces unnecessary energy consumption compared to existing methods. Through proof, the constructed event-triggered conditions effectively eliminate Zeno behavior. Finally, numerical simulations validate the effectiveness of this control protocol in formation flight.
Despite the demonstrated performance of the proposed control scheme and protocol, there remain several issues and areas for further research and improvement. For instance, this study primarily focuses on formation control in static environments, while robustness and adaptability in dynamic or unknown environments still need further investigation. Additionally, sensor errors and communication delays in practical applications present challenges to the distributed control protocol. Future work should involve experimental validation on real UAVs and explore more efficient formation control in complex environments.
Footnotes
Author contributions
All authors contributed to the study conception and design. Material preparation, data collection and analysis were performed by the first author and second author. The first draft of the manuscript was written by the first author and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project has received funding from the National Natural Science Foundation of China. (Fund Project Number :61463030)
Data availability statement
The data underlying this study cannot be made publicly available due to confidentiality agreements. All data were handled in accordance with strict privacy and security protocols to ensure accuracy and integrity. While the specific data cannot be shared, we affirm that the research findings and conclusions are based on thoroughly validated information.