
Abstract
This paper deals with the design of fractional order PID controllers based on nonlinear optimization for Multi-Input Single-Output (MISO) systems with time delays. Two approaches are used to obtain optimal controllers’ parameters. The first uses time-domain specifications and consists of minimizing time-domain criteria without constraints. The second uses frequency-domain specifications and imposes the open-loop phase to be flat in a specified frequency band. Simulations results and a comparative study are presented to verify the effectiveness of each approach.
Introduction
Since its development, Proportional Integral Derivative (PID) controller has been frequently used in industrial control because of its ease of application and design. 1 Nowadays, it still widely used in most control systems even though control theory has advanced considerably. Design, implementation and tuning of PID controllers have all been extensively studied in the literature. 2 Nevertheless, PID efficiency dramatically decreases when it deals with uncertain systems, nonlinear systems or dead-time systems. Therefore, despite all its benefits, the PID controller became unable to provide robustness and disturbance rejection in same cases.
To solve this problem, many researchers have developed several approaches and most of them are based on the numerical optimization. 3 However, obtaining the requested robustness is not possible even when the optimization is applied to the PID design. One of the well-known solution to this issue is proposed by Podlubny 4 who has developed an extension of the PID. This extension, known as the fractional PID, has really been successful in research due to its robustness characteristics and flexibility in design.5,6
To obtain robustness to load disturbances, high-frequency noise, and plant model uncertainty, a tuning technique can be used to determine the optimum controller parameters satisfying all constraints. Finding the fractional controllers’ optimum parameters within the specified limitations is the aim of the tuning approach. Two main approaches exist in the literature for the design of a fractional order controller:
Time-domain design approach: it is based on time-domain specifications, including the dominant pole placement or time-domain integral performance index optimization techniques.
Frequency-domain design approach: it is based on frequency-domain specifications and optimization-based design techniques.
To improve fractional control efficiency, researchers have presented a design approach based on a constrained numerical optimization to obtain some desired frequency specifications such as phase margin, unity-gain crossover frequency, and sensitivity to high-frequency noises and disturbances.7–9 Moreover, in Saidi et al. 5 an extended Monje’s method have been developed to enlarge the desired frequency band where the phase is considered constant.
In literature, many works treated fractional PID controllers design for Single Input Single Output (SISO) and Multi-Input Multi-Output (MIMO) systems.10–13 Nowadays, various design methods have been proposed for FOPID controller tuning. The well-known Ziegler-Nichols tuning rule has been expanded to include an S-shaped step response in the FOPID controller, nevertheless, it is only effective in certain lag-dominant processes. 14 Some tuning techniques are proposed to minimize integrated absolute error (IAE) for a typical first-order-plus dead-time model, subject to constraint on the maximum sensitivity. 15 The internal-model-control (IMC) tuning technique has also been included into the FOPID controller design in recent years. 16
In real life industrial applications, Multi-Input Single-Output (MISO) systems are frequently encountered in the fields of petrochemical engineering, fluid transportation and automotive systems.17–19 The literature presents some works that have treated the MISO rational control problem: in Lupu et al., 20 multi-model method was implemented. In addition, Rico Azagra et al. 21 developed the quantitative feedback theory technique to design rational controllers for MISO system. In Zhang et al., 22 an alternating beam forming optimization algorithm based on the Lagrangian method and MM technique was proposed. Eskandari et al. 23 treated the MISO system problem control with model predictive control (MPC) method.
Multi-Input Single-Output system robust control is a challenging problem. In fact, imposing some frequency-domain or time-domain specifications to sub-system with different dynamics is a difficult problem. That’s why, to the best of our knowledge, MISO robust fractional control problem is still open for research and there exist only few works on it.24,25
This paper presents robust design methods developed for MISO systems. The first is based on time-domain specifications while the second is based on frequency-domain specifications. Three cases of MISO systems with delay are treated. The first consists of SISO subsystems without time delays. The second is for SISO subsystems with equal time-delays. The last treats SISO subsystems with different time delays.
The paper is organized as follows: the next section presents the problem statement of MISO systems control. The two design approaches are then developed. Next, to show the efficiency of these approaches, numerical simulations are given. The last section presents some conclusions and perspectives.
Problem statement of MISO systems control
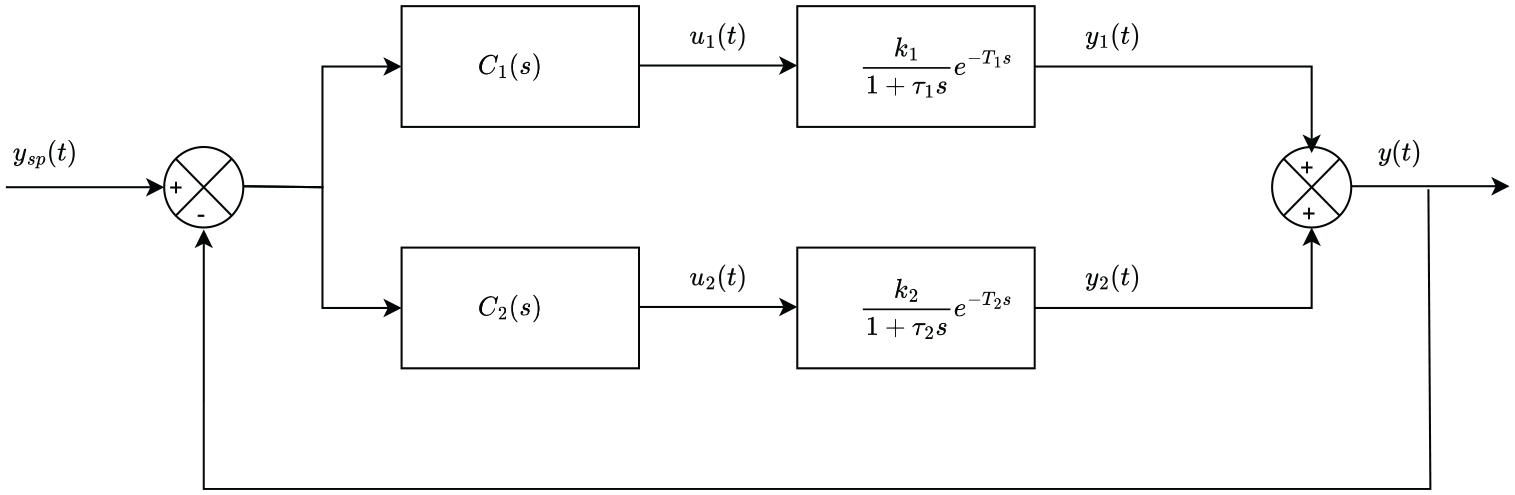
A MISO system can be presented, as shown in Figure 1, with
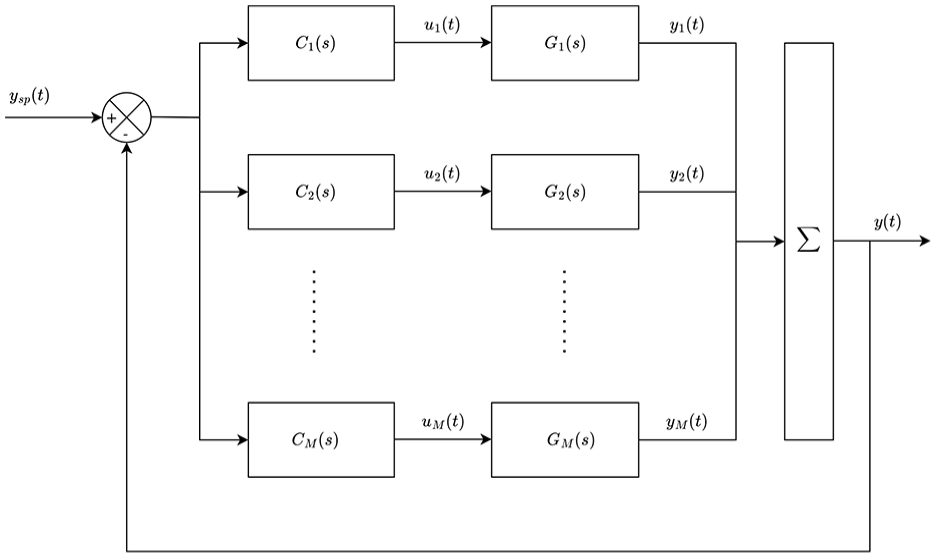
Closed-loop MISO system.
The control and the output signal are denoted, respectively, by
Many works have treated the control problem of MISO systems. In Yazdizadeh et al.,
26
a new decentralized resilient optimum MISO PID controller based on Characteristic Matrix Eigenvalues and the Lyapunov approach is proposed. Moreover, Kluska
27
has developed an approach to design rational PID for MISO system with time delay. Some works, presented in Moussa et al.,24,25 have developed fractional order controllers design methods for MISO systems. In this paper, we consider only time delay subsystems with the same structure. The objective is to design fractional-order controllers
The transfer function of the

where
The aim of this work is to find the optimal parameters of all controllers while using the output of the MISO system and the desired performances. Thus, the
Design of fractional PID controllers
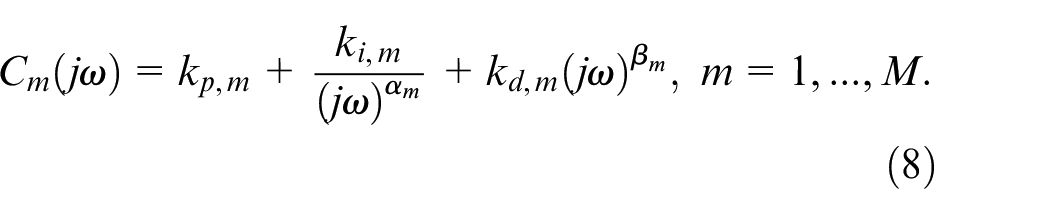
To design
The parameters of

with

Time-domain design approach
For this approach, a time-domain cost function is considered, and no constraints are used. The choice of the cost function is very crucial in solving the design problem. The time-domain cost function
Integral Squared Error:

Integral Absolute Error:

Integral Time-weighted Squared Error:

Integral Time-weighted Absolute Error:

The algorithm of time-domain design approach can be summarized as follows:
★ Step 1:
- Give the time-domain closed-loop desired transfer function
- Give initial values of parameters
- Compute the MISO system output
★ Step 2:
- Refine
- Compute MISO system output
★ Step 3: If a maximum number of iterations (
The time-domain approach can ensure some performances (stability, disturbance rejection, rapidity, precision). But, in several cases, it cannot ensure robust stability. Consequently, a frequency-domain approach is proposed in the following section.
Frequency-domain based design method
In the frequency-domain, the
Consider a desired phase margin

where
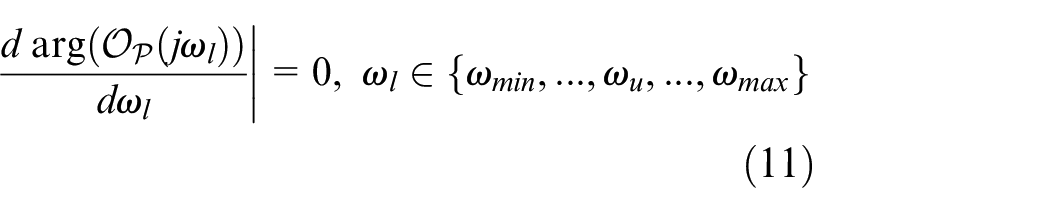
To obtain desired performances, the following constraints are used:
Desired phase margin

Stability robustness:
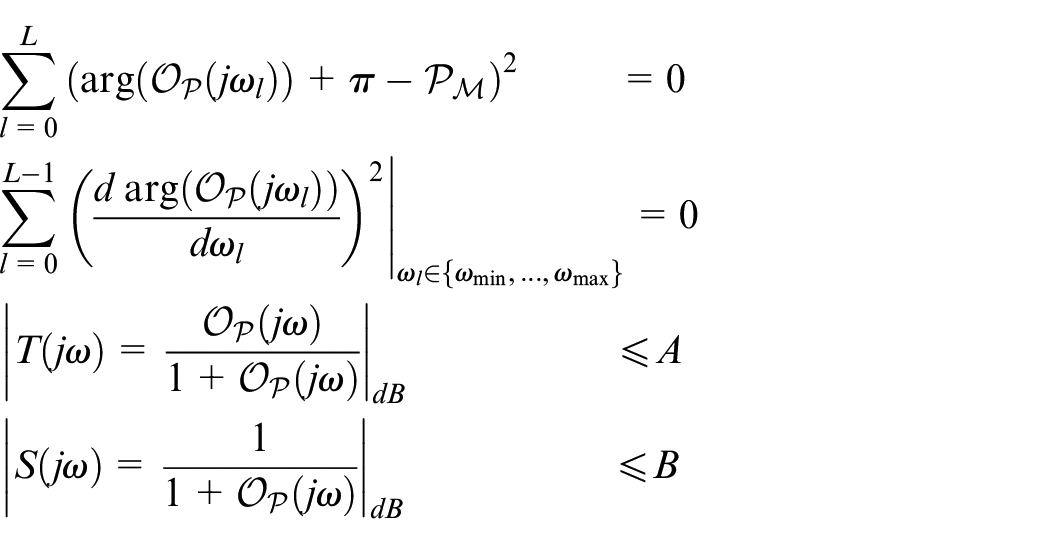
To satisfy constraints (10) and (11), there will be really so many constraints to be solved by the optimization algorithm. This will lead to a huge computing time and less effective method. To solve this problem, the constraints are reformulated as follows:


where
High frequency noise attenuation is achieved by the following constraint:

with
Output disturbance rejection using an additional constraint on the sensibility function

with
The numerical constrained optimization problem is given as:

subject to
The cost function to be minimized is defined as:

with
and
For example, we consider that all subsystems composing the MISO system are represented by first order with time delay transfer functions as:

where
In the case when
Numerical simulations
Consider the following Two-Input Single-Output (TISO) system represented by Figure 2.
The considered TISO system structure.
With

For this example, only a
Time-domain design approach
In this section, the parameters of
Time-domain design specifications.

Case 1
where
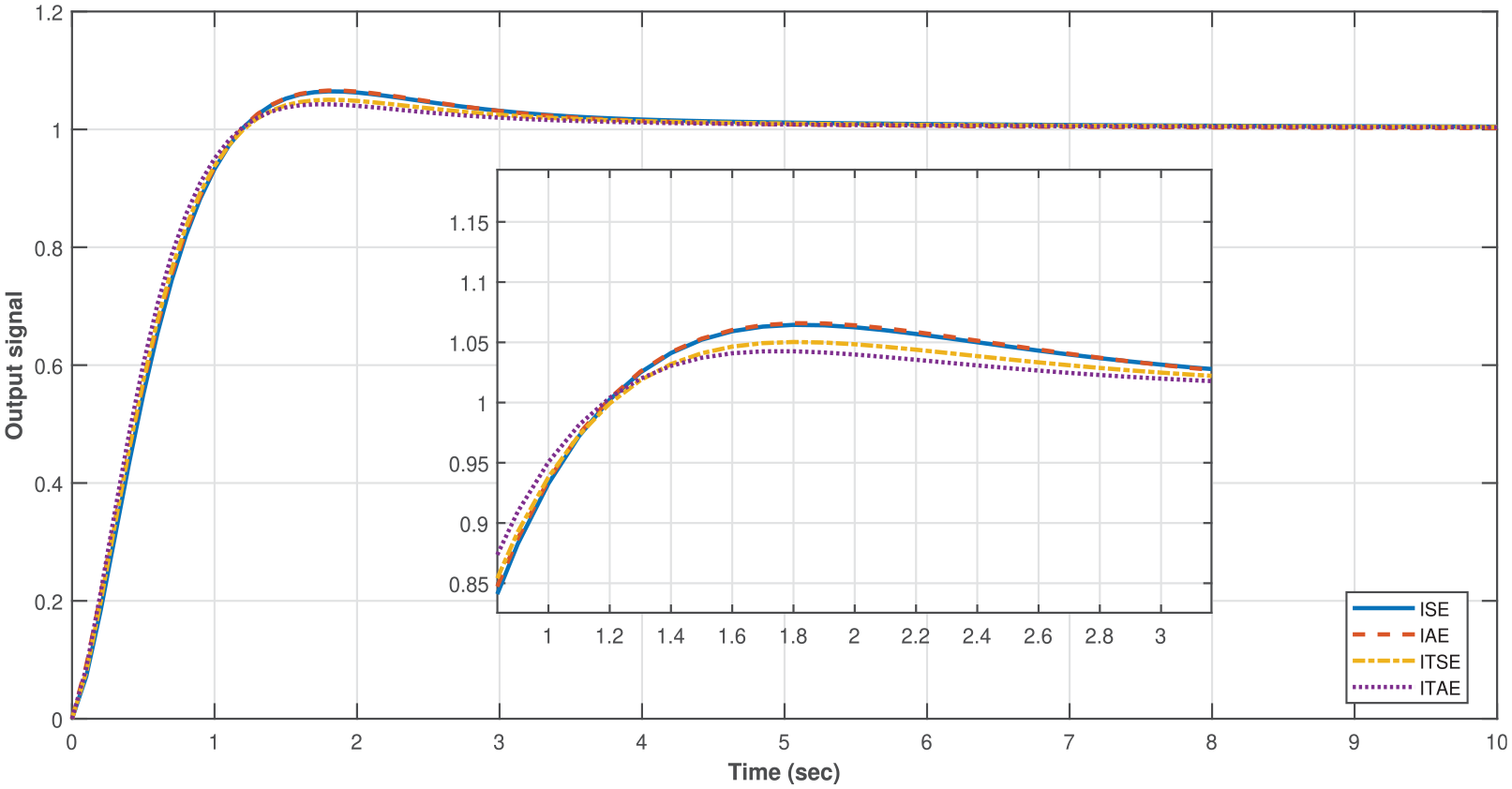
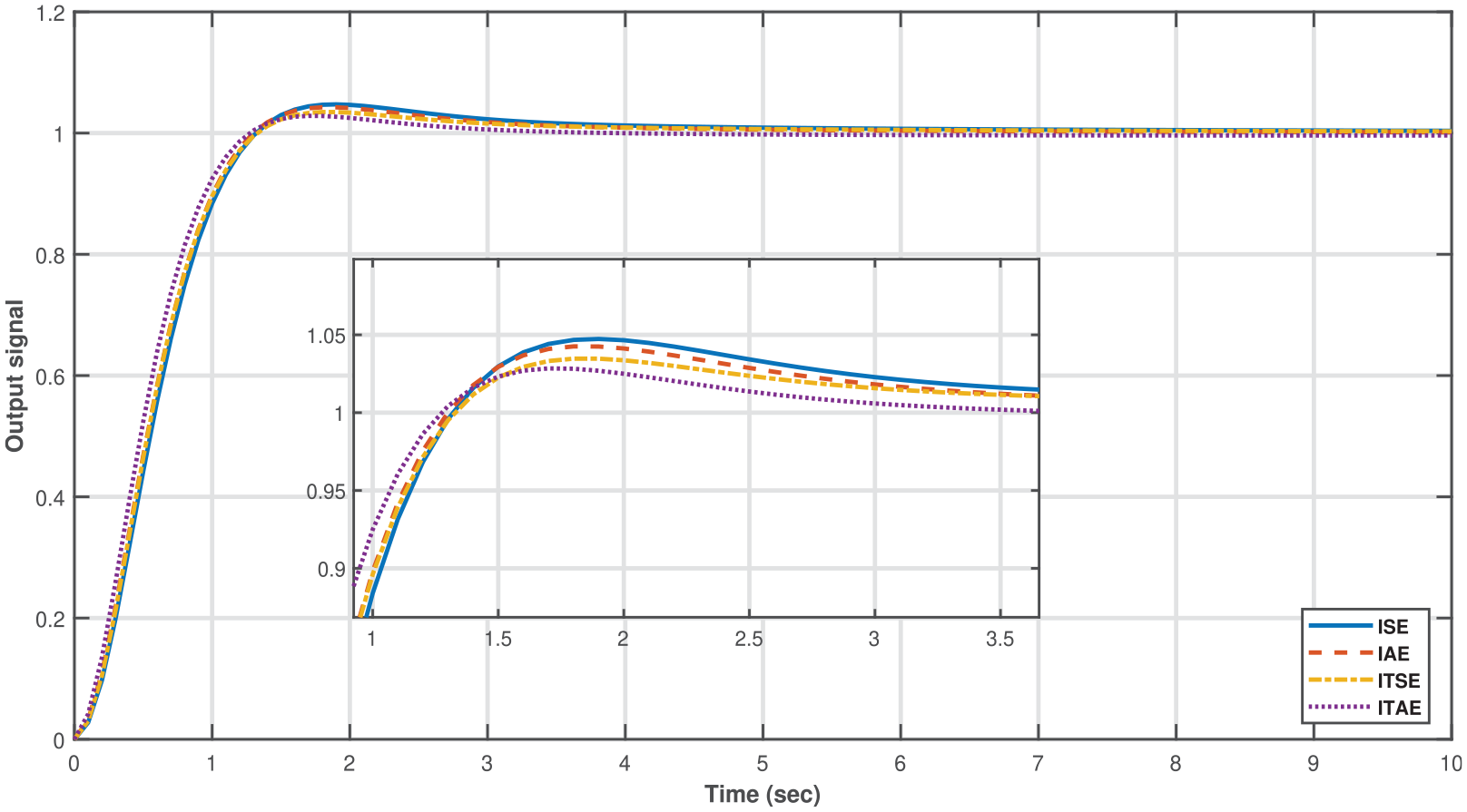
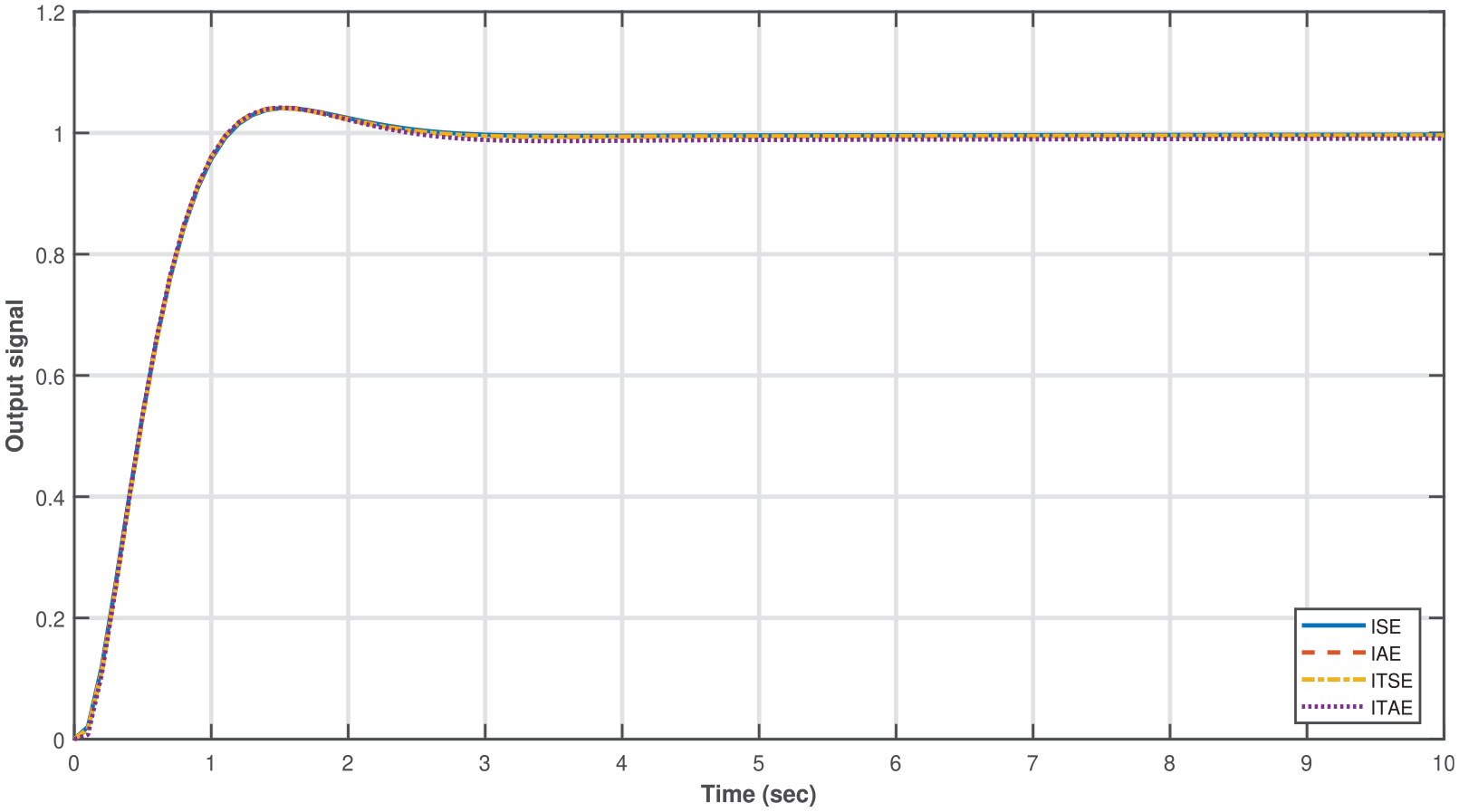
Closed-loop system responses for a positive unity step unit setpoint
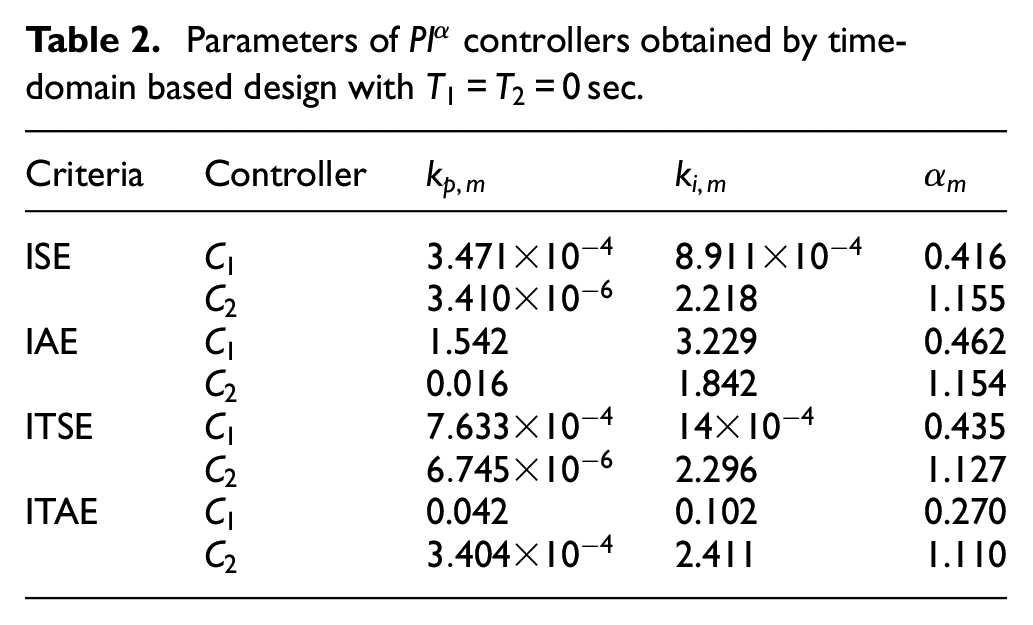
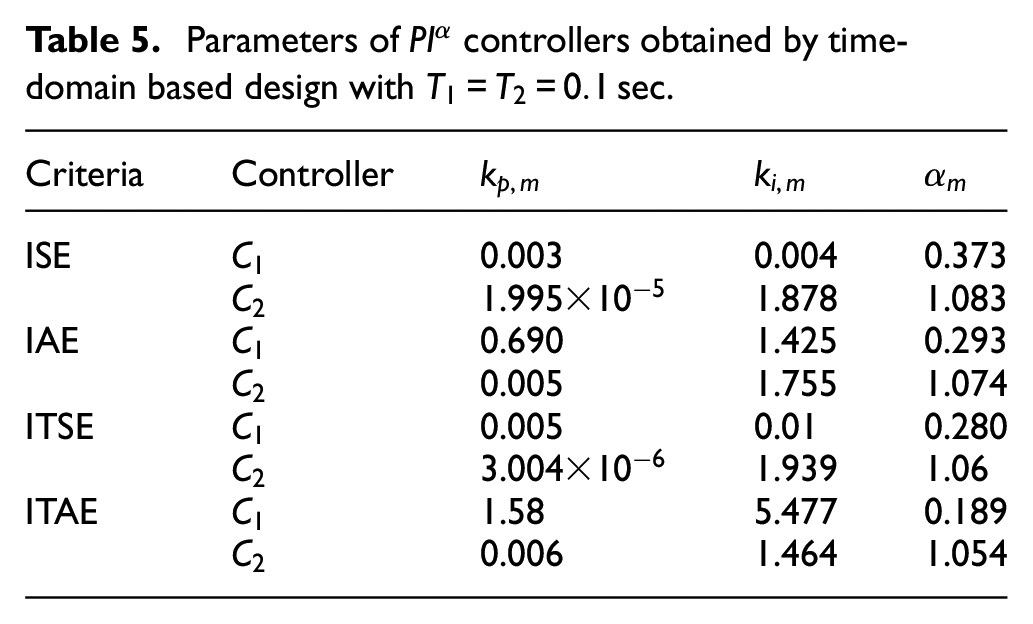
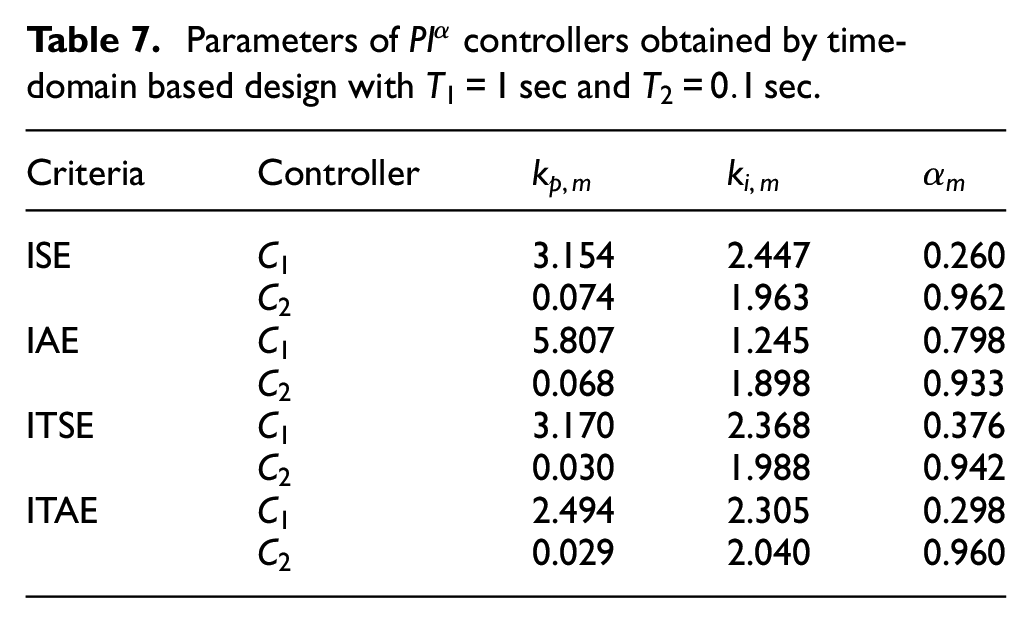
Parameters of
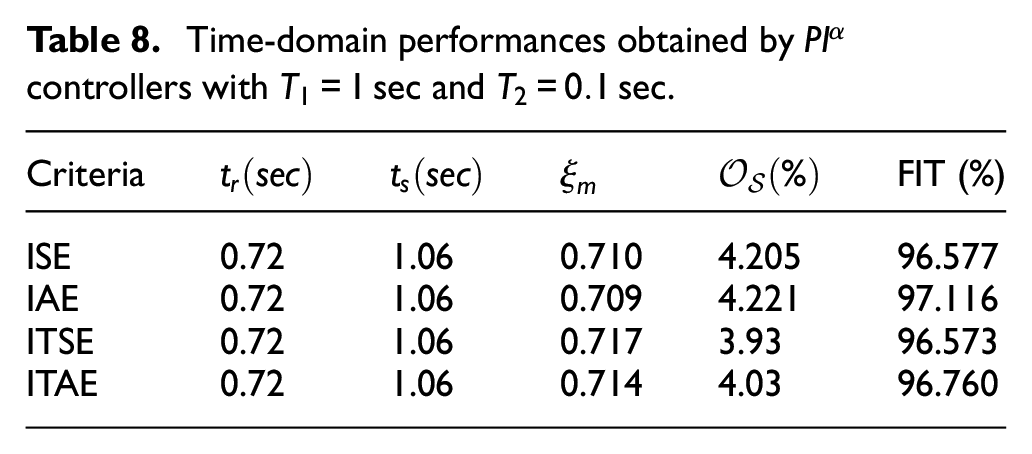
Time-domain performances obtained by
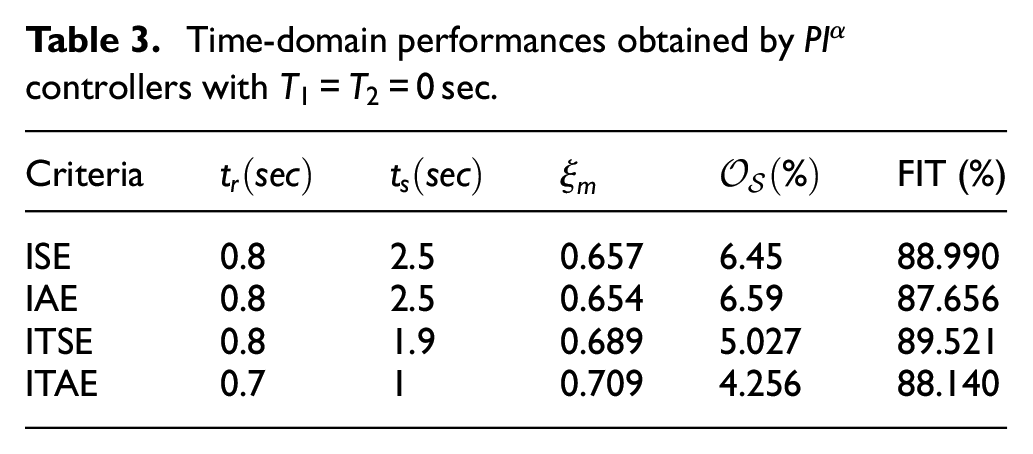
It is clear from Table 3 and Figure 3 that the criterion ITAE gives the desired time-specifications. To compare these results with those obtained by PI controllers, minimization of the ITAE criterion is used to tune PID parameters. Table 4 presents time-domain performances obtained by
Time-domain performances obtained by
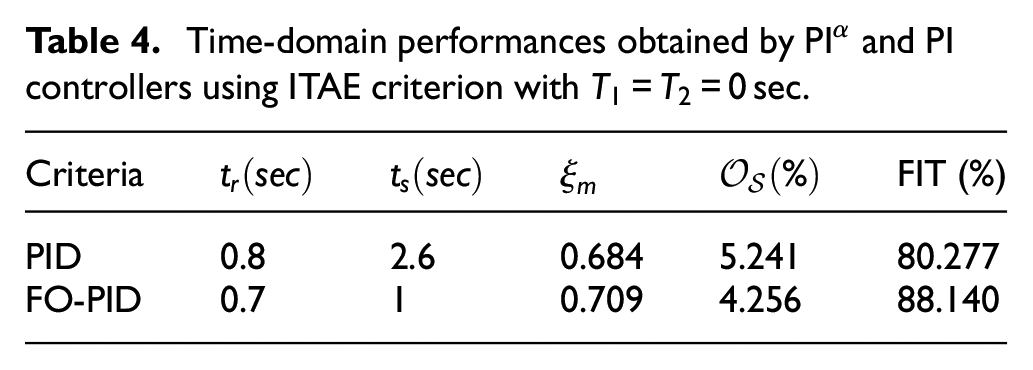
As shown by Table 4 the performances obtained by the
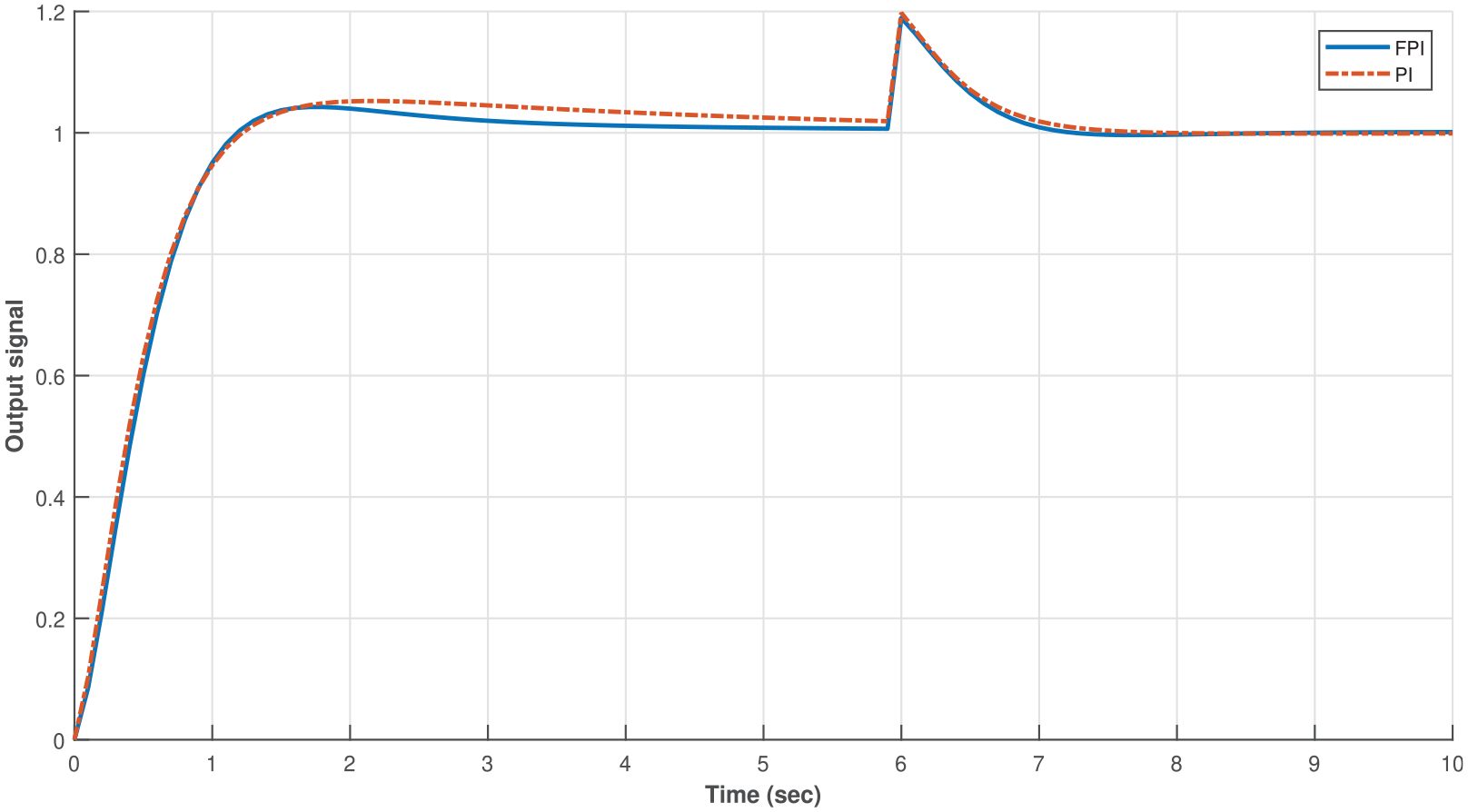
Closed-loop system responses for a positive load disturbance
Case 2
Parameters of
Time-domain performances obtained by
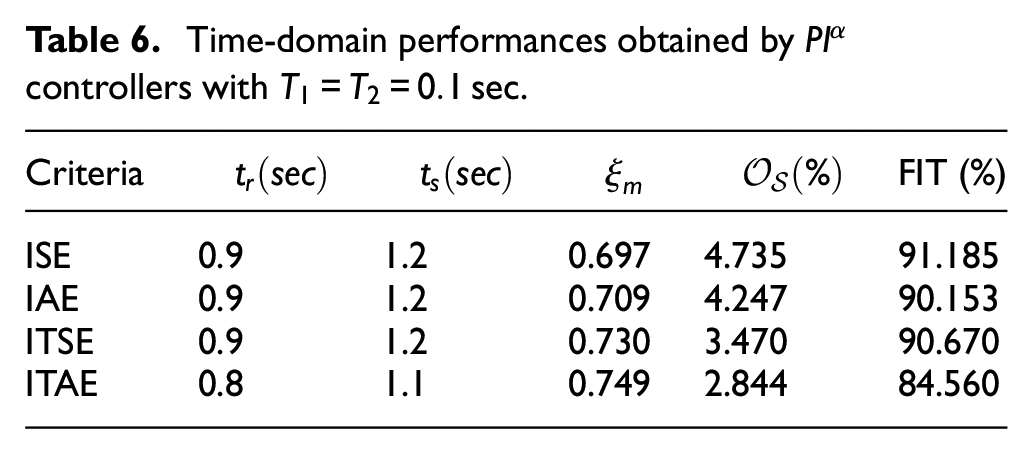
Figure 5 shows the step responses of the corrected MISO system with
Closed-loop system responses for a positive unity step unit setpoint
Case 3
Parameters of
Time-domain performances obtained by
The step responses of MISO system controlled with
Closed-loop system responses for a positive unity step unit setpoint
Frequency-domain based design
In this section parameters variations are considered to validate the robustness of the proposed frequency-domain approach. To see the efficiency of
Case 1
Frequency-domain specifications for
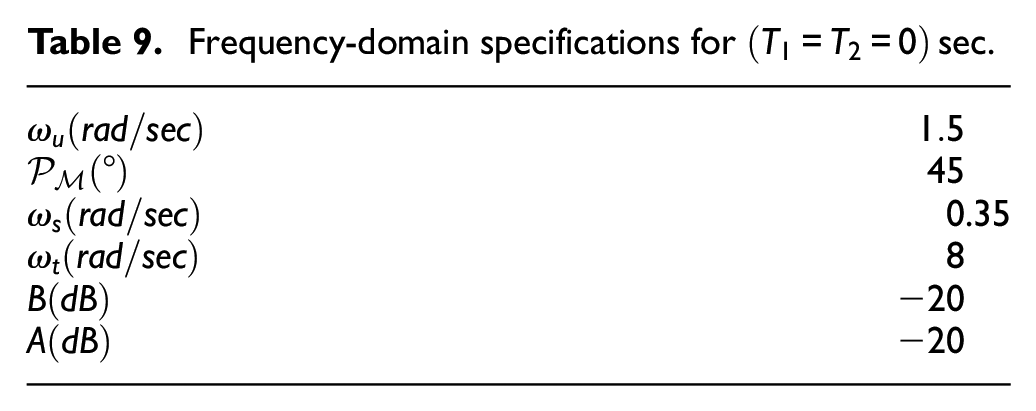
Table 10 shows the optimum parameters of
Parameters of
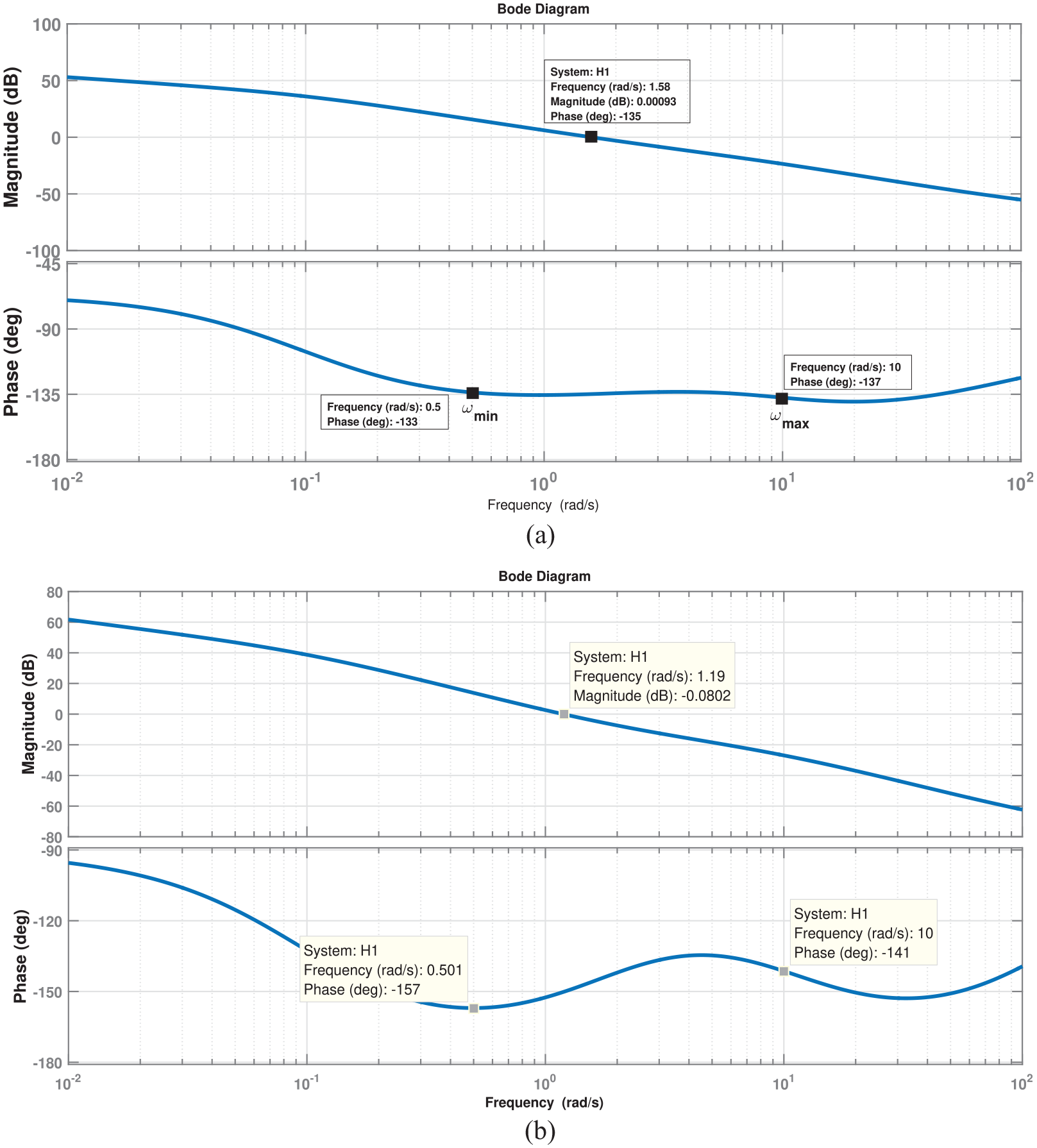
Bode diagrams of the open-loop corrected MISO system with
In Figure 8(a), the Bode diagrams show that the controllers satisfies a frequency noise attenuation
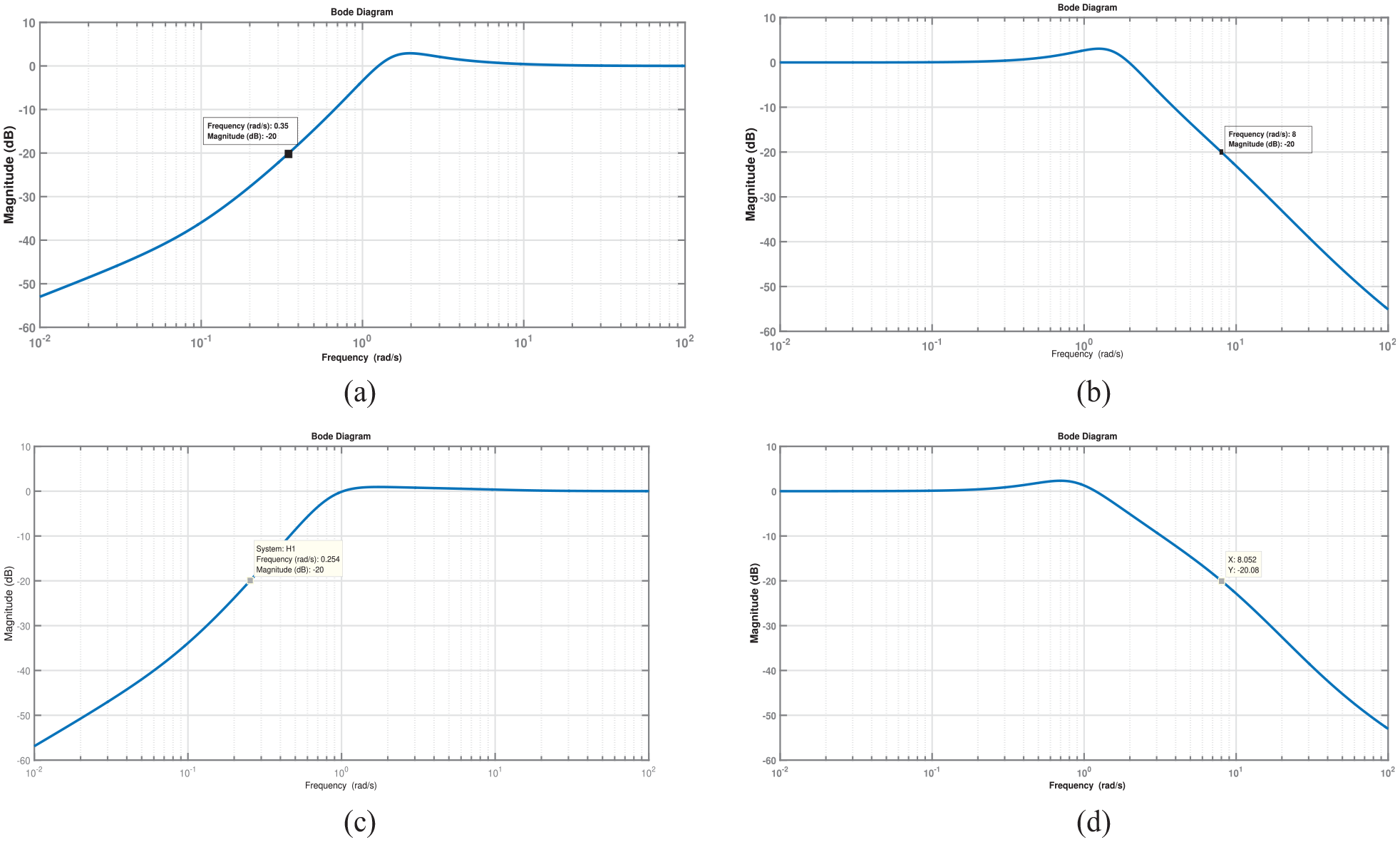
Bode diagrams of the sensitivity and the complementary sensitivity for the corrected MISO system with
Figure 9(a) and (b) show the step responses of the corrected MISO system by
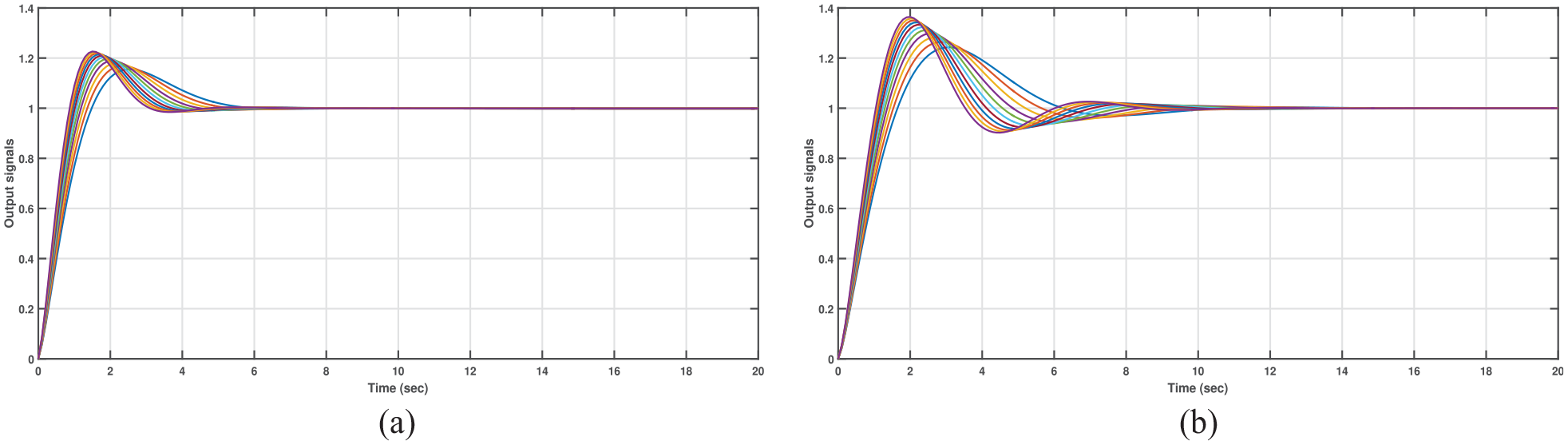
Step responses of closed-loop MISO system with gain variation and
Figure 10 depicts the control signals produced by the fractional and rational controllers tuned with optimization algorithms. It is obvious that control signals of the fractional controllers provide high energy intensity to make the system faster. Figure 10 indicates that the fractional control signals are more steady.
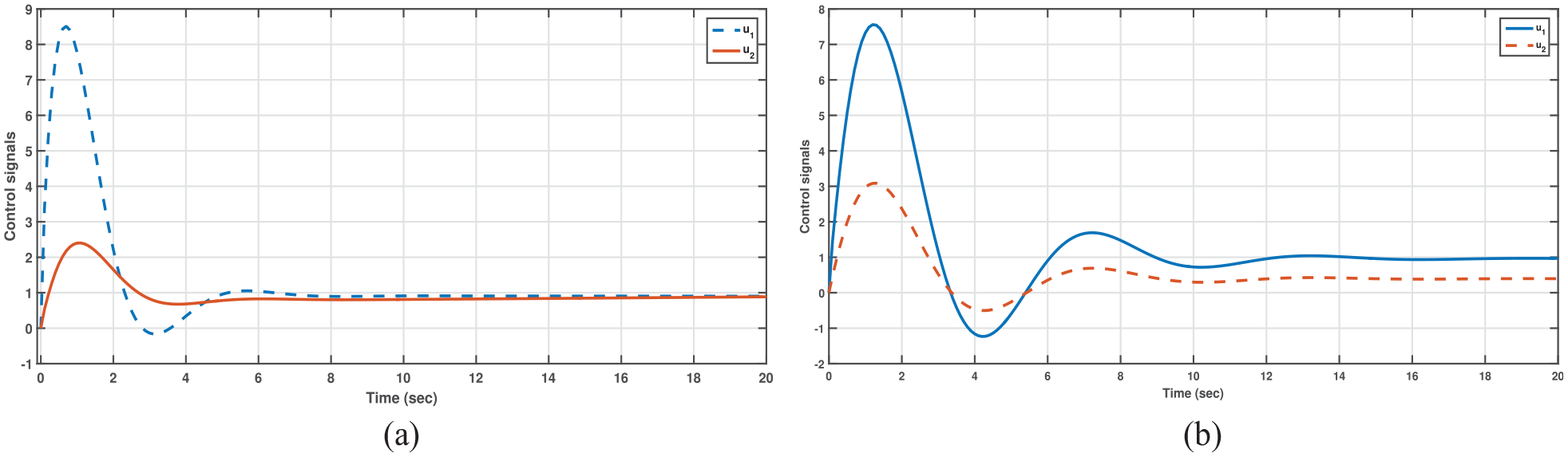
Control signals of the closed-loop MISO system with
In Figure 11, the responses of the corrected system with
Step responses of the closed-loop corrected MISO systems in the presence of additive disturbance with
Case 2
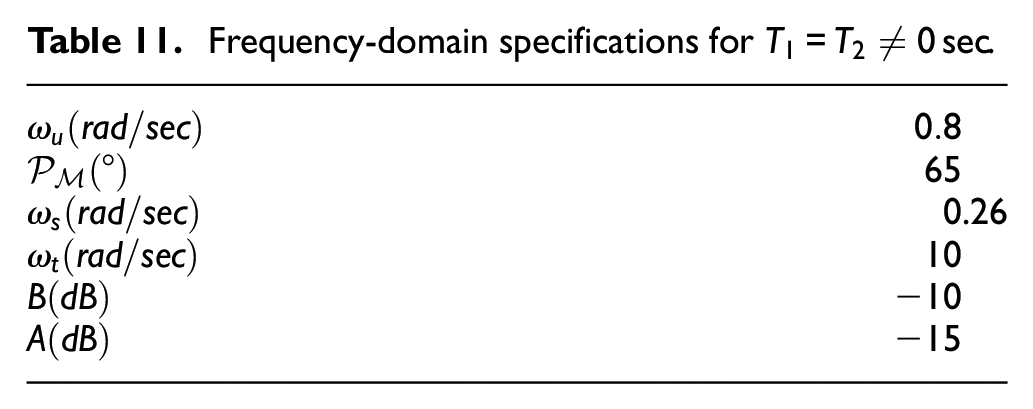
Frequency-domain specifications for
The optimum parameters of fractional controllers
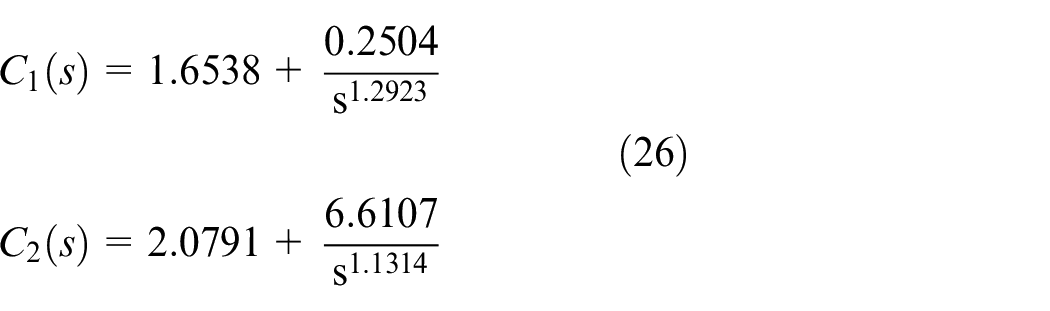
The optimum parameters of PI controllers are defined by the following transfer functions
The Bode diagrams of the open-loop MISO system corrected by both fractional and rational controllers are presented by Figure 12. In the frequency band
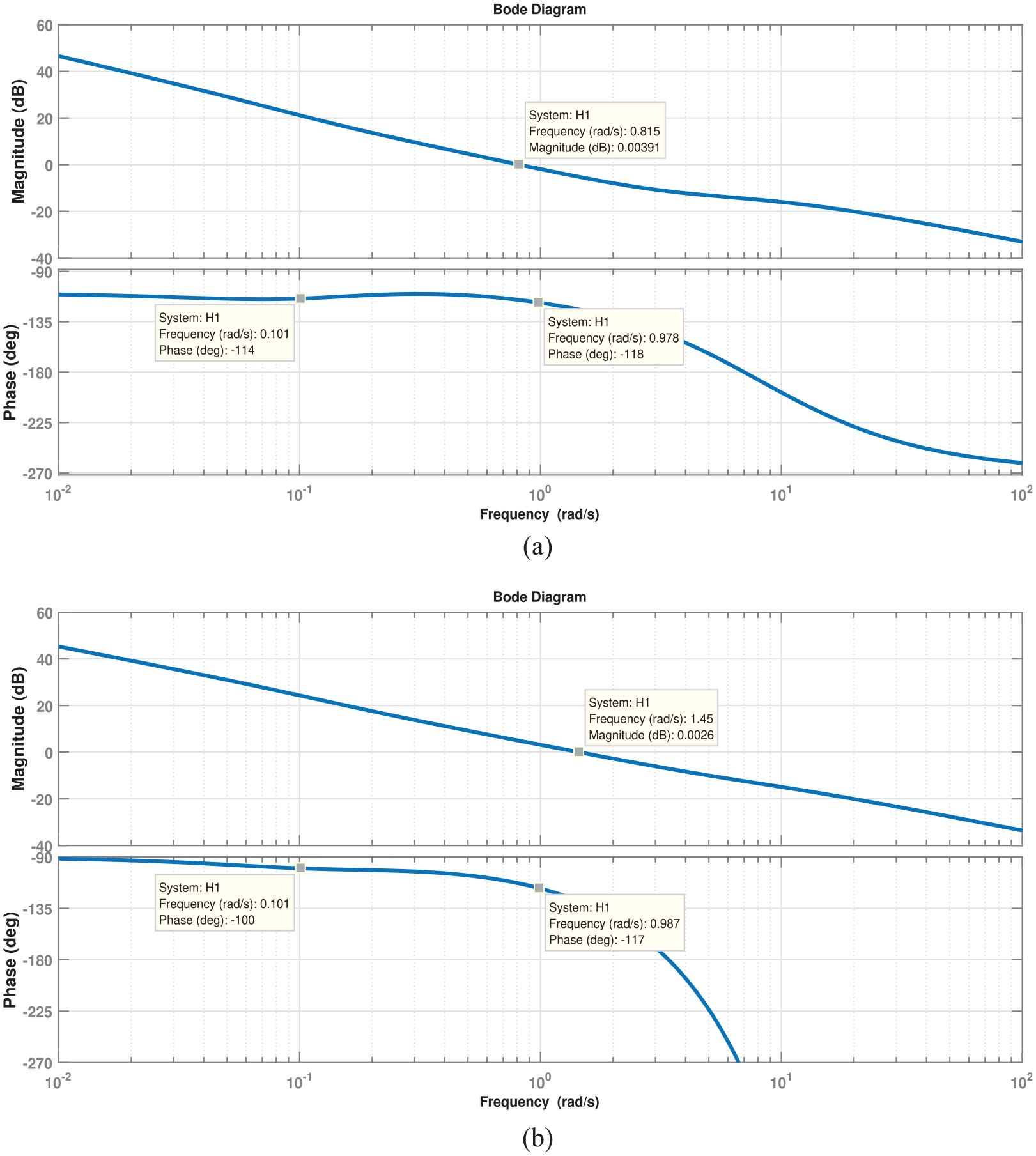
Bode diagrams of the open-loop corrected MISO system with
The Bode diagrams shown in Figure 13(a) demonstrate that the fractional controllers attenuate efficiently noises where
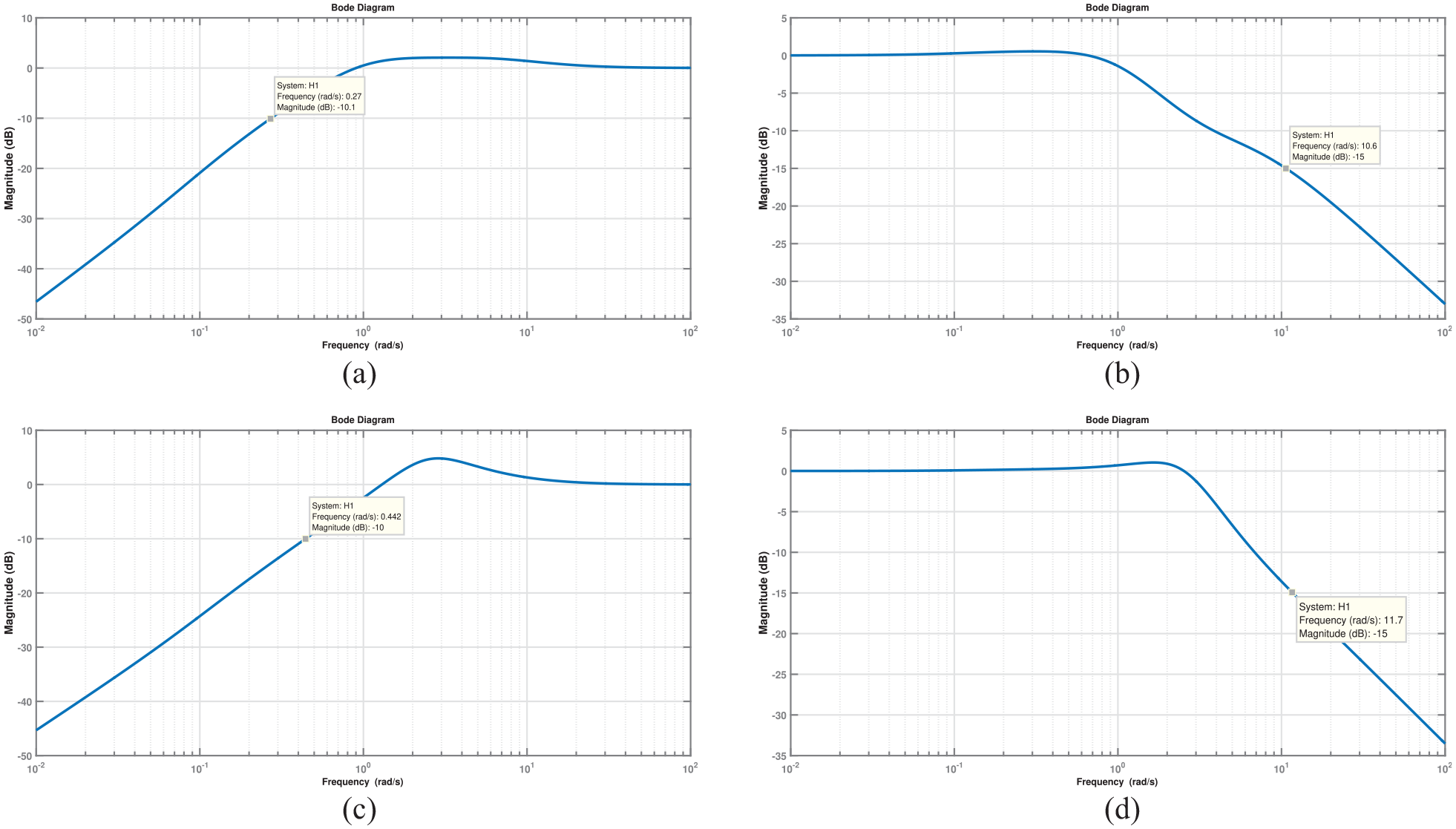
Bode diagrams of the sensitivity and the complementary sensitivity for the corrected MISO system with
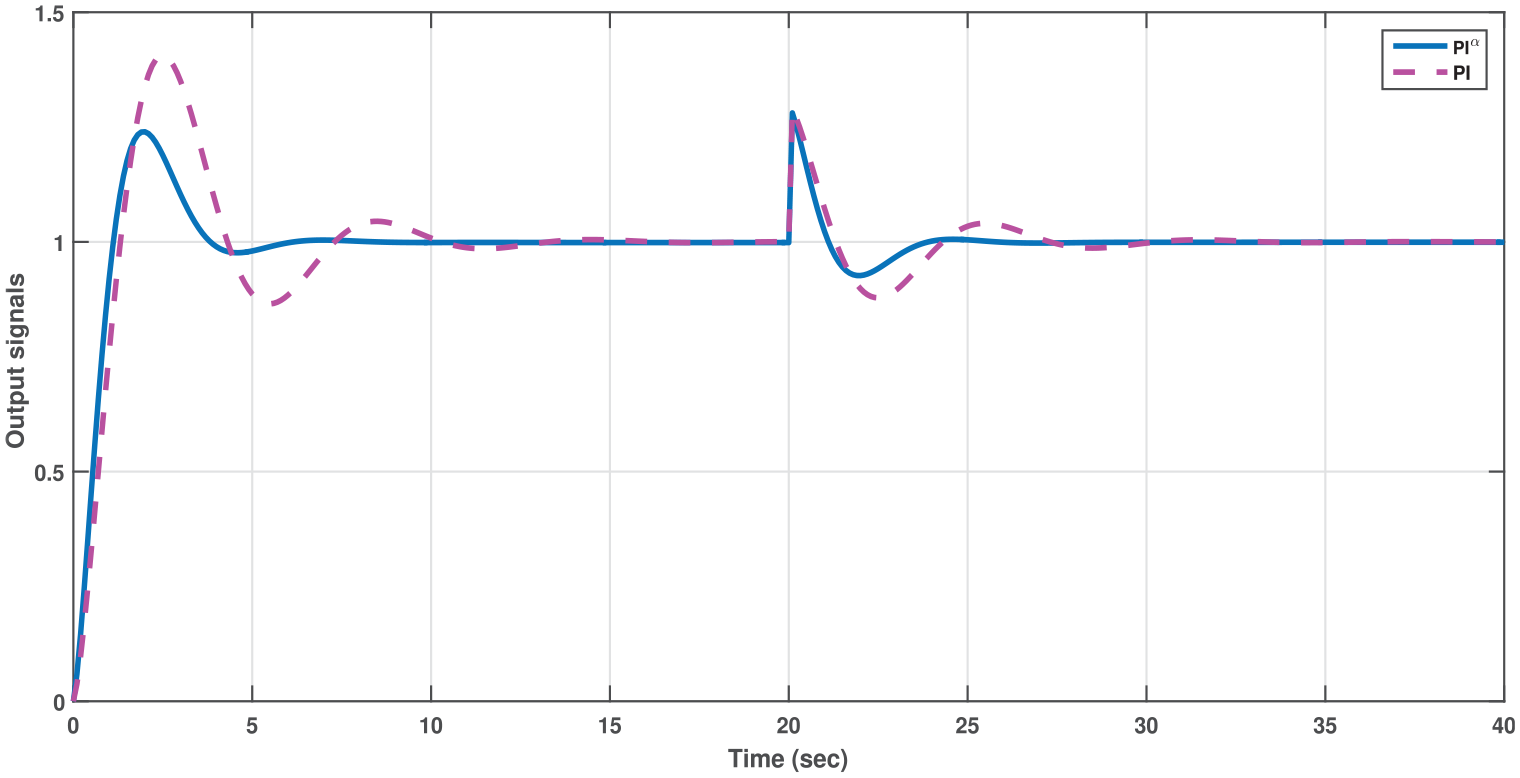
Figure 14 shows the step responses of the corrected closed-loop MISO system by
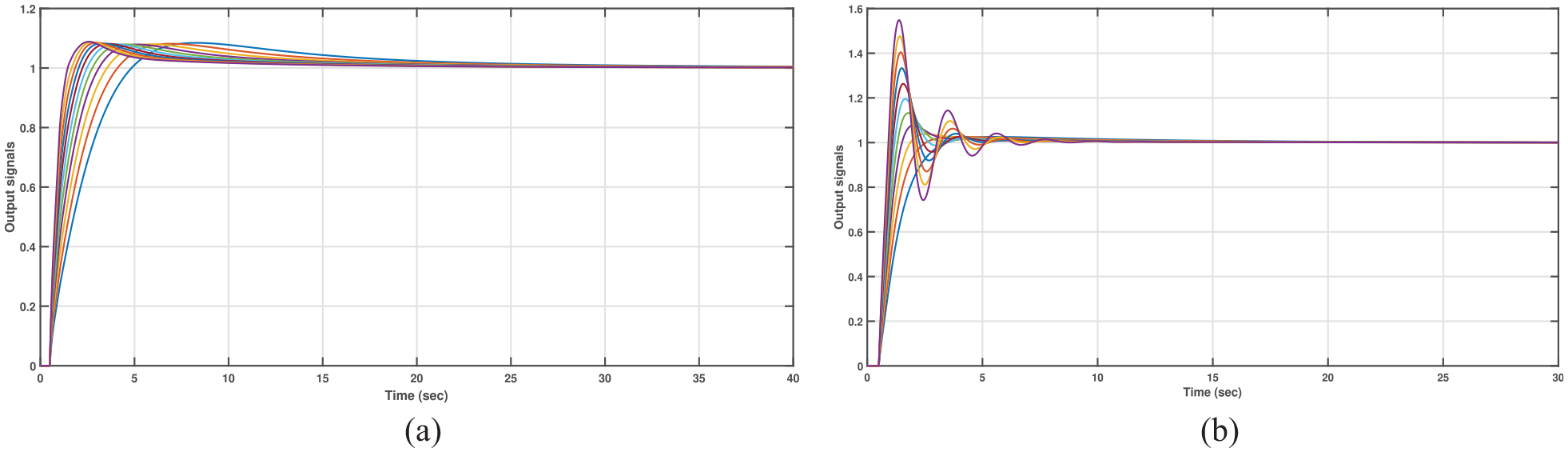
Step responses of corrected plant with gain variation (closed loop) with
Case 3
Parameters of
Figure 15 shows the Bode diagrams of corrected open-loop MISO system by fractional and rational controllers. In Figure 15(a) the open-loop phase is flat in the frequency band
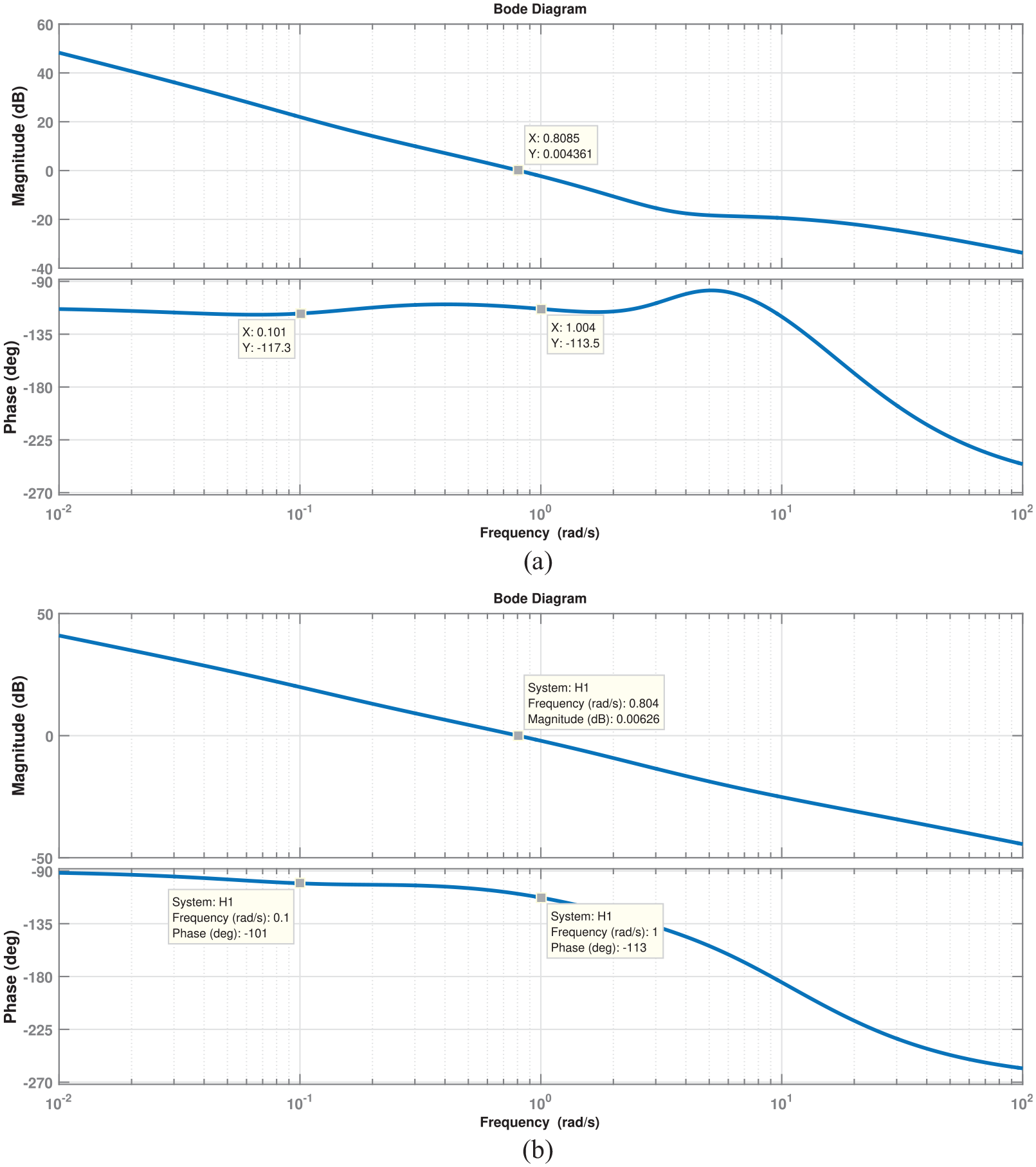
Bode diagrams of the open-loop corrected MISO system with
Table 13 summarize the optimized parameters of
Figure 16(a) depicts the Bode diagrams of the sensitivity of MISO system corrected by
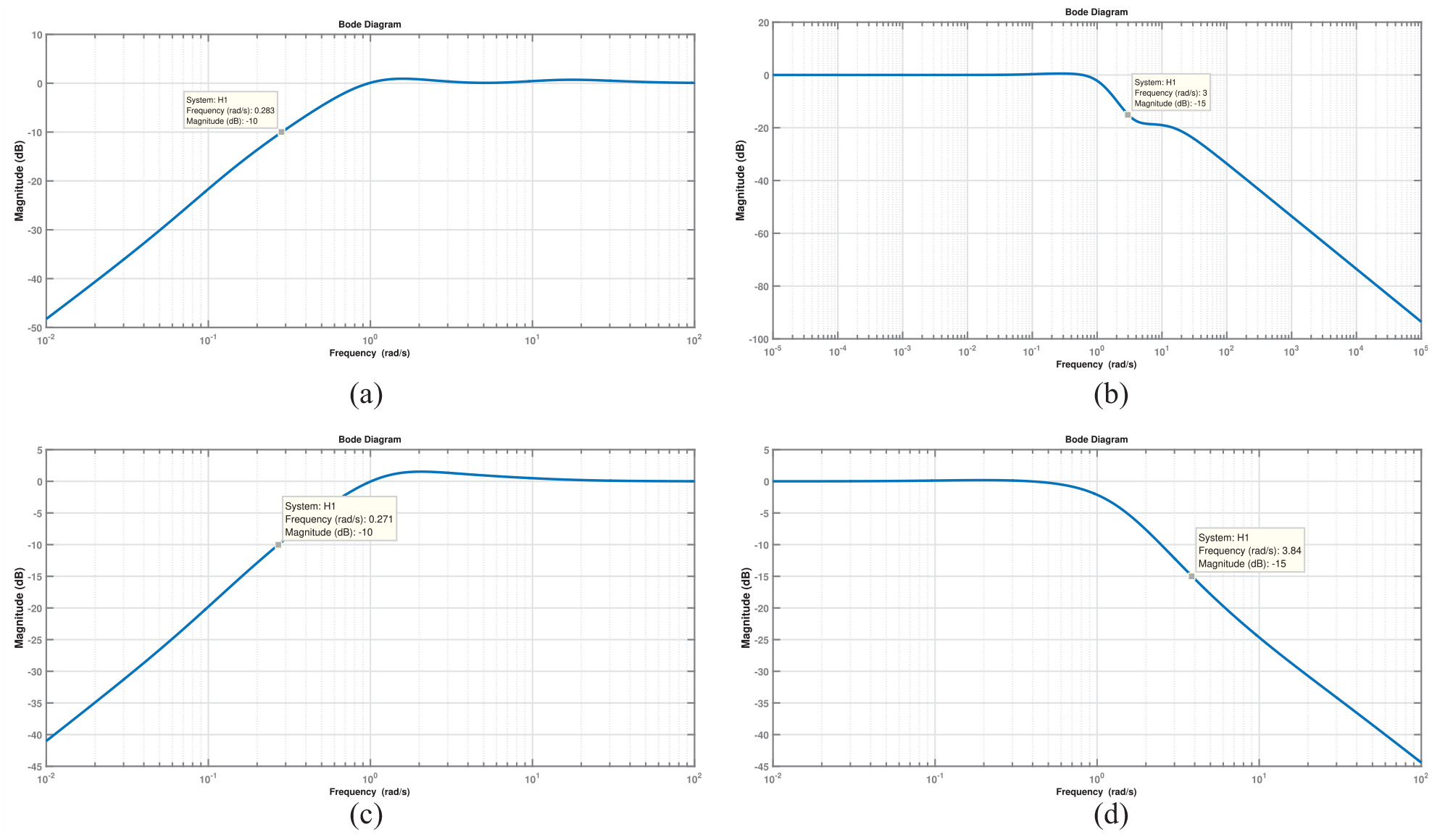
Bode diagrams of the sensitivity and the complementary sensitivity for the corrected MISO system with
Figure 17 presents the step responses of the corrected MISO system by the fractional and rational controllers with gain variation. By Figure 17 the
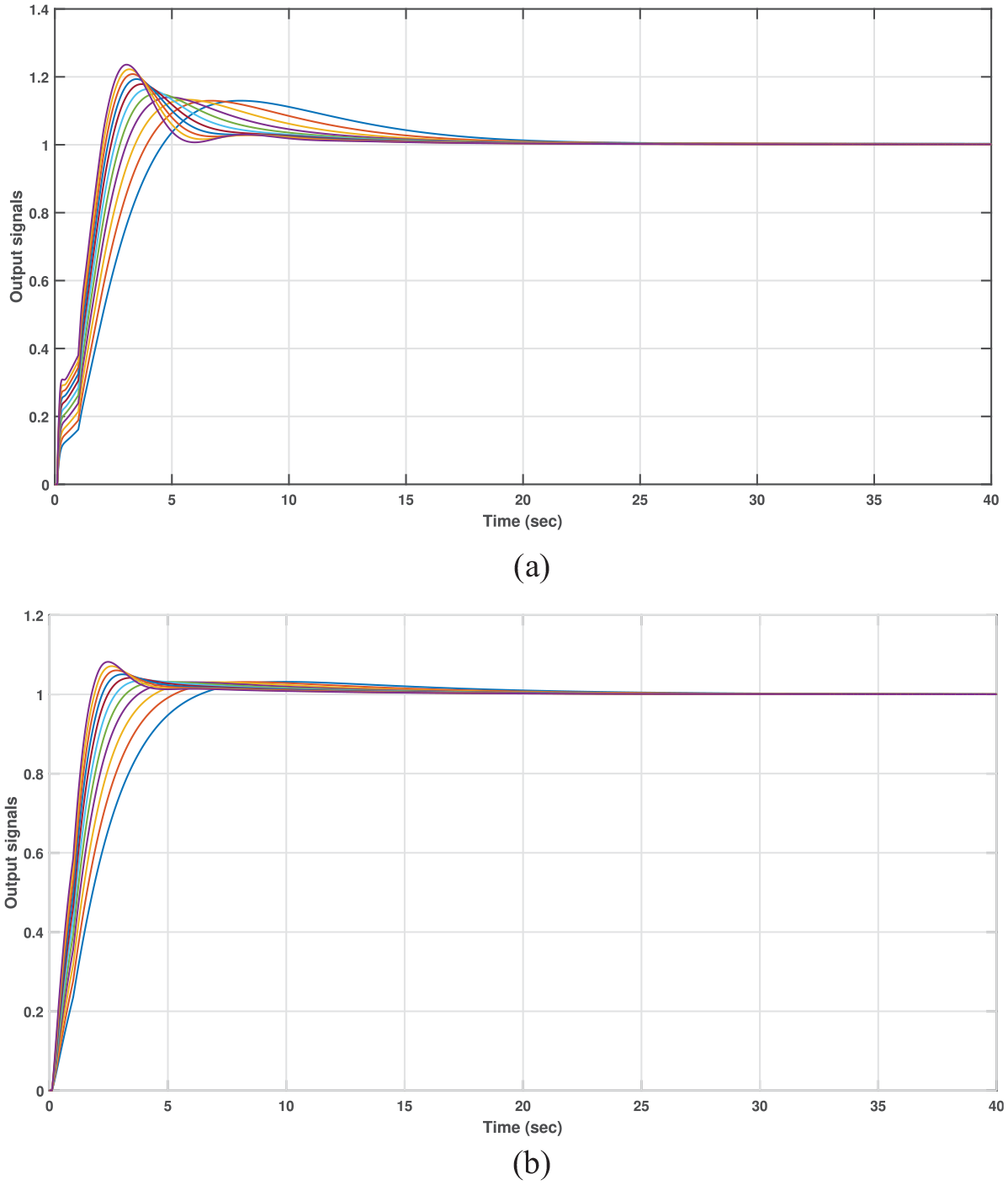
Step responses of corrected plant with gain variation (closed loop) with
Conclusion
In this paper, two fractional order controllers design approaches are developed for MISO systems. The first is based on time-domain specifications and uses a nonlinear optimization algorithm without constraints. The second approach is based on frequency-domain specifications and uses a nonlinear optimization algorithm with constraints.
Numerical simulations are presented to discuss results. Three cases based on the value of the time-delays are considered in both time-domain design and frequency-domain design. In frequency-domain, to see more the efficiency of fractional controllers a comparative study with rational controllers is presented. Besides the difficulty of MISO system control design, it has been shown that the proposed approaches lead to the desired performances and give more robustness.
The controllers designed in this work are robust in stability despite the complexity of MISO system. This can be an incentive for applying to real system in future work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.