
Abstract
The computational burden could be an issue of traditional model predictive control (MPC) in real-time applications. There are different procedures to cope with this problem such as using explicit MPC or approximation of the control inputs using orthogonal-basis functions. This paper presents the design procedure and experimental validation of a generalized discrete-time Malmquist orthogonal functions-based model predictive control (MbMPC) whose usage can decrease calculation concerns. To the authors’ knowledge, this is the first time the Malmquist functions are introduced into the MPC design. The discrete-time orthogonal Malmquist functions properties are used within this approach for approximating the future control input increments with a smaller number of parameters than in traditional MPC approaches. It is shown that the satisfactory controller and closed-loop system performances can be achieved using smaller number of tuning parameters. The performance of the proposed MbMPC is shown and compared with discrete-time Laguerre orthogonal functions based MPC (LbMPC) applied to a DC motor servo system. The simulation and experimental results demonstrate better IAE, ITAE, ISE and ITSE controller performance indices as well as faster average calculation time in comparison with the LbMPC approach. Additionally, the advantage of using the proposed method is emphasized by showing how the length of the prediction horizon affects the computational burden in comparison to the traditional MPC approaches.
Keywords
Introduction
Model predictive control (MPC) belongs to a set of advanced control methods that use a process predictive model to generate future control inputs. MPC calculates the control signal trajectory by solving constrained optimization problem.1–5 The main issue related to the traditional linear/nonlinear MPC applications is computational complexity for online solving of the optimization problem. Traditionally, the optimal MPC signal is obtained over the control horizon
Another approach to simplify linear MPC design and reduce the computational load is to optimize the future control trajectory, that is, the predicted trajectory of the control input increments, by employing a set of orthogonal polynomial functions. The use of the orthogonal functions within the MPC approach provides a long control and prediction horizons realization without working with a large number of parameters. Orthogonal basis functions have been first applied in the identification, parameterization and modeling of the dynamic systems.9–16 The orthogonal properties of these functions are used for approximation of the discrete-time impulse response of dynamic systems. Obtaining the optimal values of the coefficients of the orthogonal polynomials are based on the least squares polynomial approximations. A similar idea is used for the controller design purposes.17–20 The most frequently utilized orthogonal basis functions for MPC design are Laguerre functions.21,22 The robust predictive controller design procedure using Laguerre functions is proposed in Ghabi and Dhouibi. 23 These functions are also implemented in linear SISO system design to lower the model complexity and reduce the optimization problem by the worst-case approach. In Rossiter et al. 24 and Rossiter and Wang 25 the authors have used Laguerre functions to achieve feasibility improvements to the standard MPC algorithm. In order to reduce the computational complexity and improve the sensitivity of MPC, Laguerre functions based MPC (LbMPC) with introduced exponential weights is proposed and applied to fully actuated-by-wire electrical vehicles in Zhang et al. 26 The exponential weighted LbMPC is also used for solving issues related to numerical ill-conditioning with an experimental demonstration of the method applied to the Twin Rotor MIMO system. 27
There are different methods for tuning MPC parameters to get optimal global solution. The usage of effective intelligent algorithms with fewer adjustable factors is presented in Mohamed et al. 28 Similar approaches have been already implemented in tuning PID controllers, 29 fuzzy controllers, 30 and self-adaptive state-space predictive functional PID control. 31 In Essa et al. 32 bat-inspired algorithm is proposed to find the best parameter values of traditional MPC by using two different performance indices including cross-correlation function and integral time absolute error. The adaptive MPC based on the improved gray wolf optimizer 33 with Kalman filter 34 is suggested for control of autonomous vehicles considering system vision uncertainty. The performance index, which depends on the response maximum overshoot, steady-state error, and settling time is minimized to give the optimal values of a sampling time, prediction and control horizons, as well as weighting factors of MPC cost function. In order to optimally tune LbMPC parameters, authors propose the implementation of a new intelligent algorithm named Dandelion Optimizer 35 that provides fast convergence rate with the same performance index as in. 33 Other applications of the LbMPC can be found.36–43
This paper presents the implementation of Malmquist orthogonal functions in the design of MPC. To the authors knowledge, these functions have not been used earlier for the predictive controller design. The initial idea comes from their usage in the identification of dynamic systems.44–48 The Malmquist orthogonal systems and connection between generalized Malmquist functions and Müntz polynomials are presented in Heuberger et al
45
and Milovanović et al.
46
The procedure for mapping poles to zeros and vice versa is performed by using generalized bilinear transformations.
47
The design procedures of the orthogonal Malmquist filters are presented in continuous- and discrete-time domains.49–51 The obtained discrete-time Malmquist network is utilized in this paper for developing discrete-time Malmquist functions. Their orthogonal properties represent the basis for developing Malmquist functions based MPC (MbMPC). This class of functions employment has the advantage of having only a few tuning parameters that are independent of the sampling time
In the sections that follow, the derivation procedure of the Malmquist network shown in Danković et al. 49 is recalled first, and the new method of the MbMPC design is presented afterward. The simulation and experimental results obtained by applying the proposed MbMPC in DC motor servo system control are also given in the sequel. The main contributions of this paper are:
(1) introducing the novel MbMPC method for the predictive controller design using discrete Malmquist functions,
(2) this parametarized design method enables realization of longer horizons with small number of parameters without affecting the computational burden,
(3) the results emphasis the reduced computational time in comparison with time needed in the traditional MPC approach,
(4) this approach provides better fine-tuning of system performances thanks to non-identical Malmquist orthogonal functions parameters,
(5) the effectiveness of the realized approach is validated on the DC motor servo system using IAE, ITAE, ISE, and ITSE performance indices,
(6) the controller performance of the proposed algorithm is compared with performances of LbMPC approach,
(7) the constrained optimization problem is solved by Hildreth’s QP procedure, which also reduces online calculation time.
Discrete-time Malmquist functions
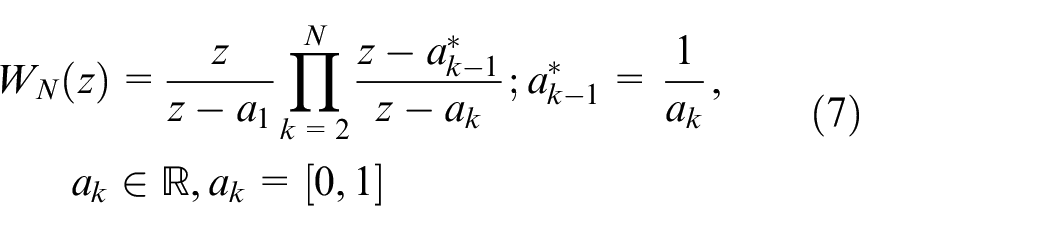
To obtain discrete-time Malmquist functions, the following rational functions sequence is introduced in Danković et al. 49

The symmetric transformations
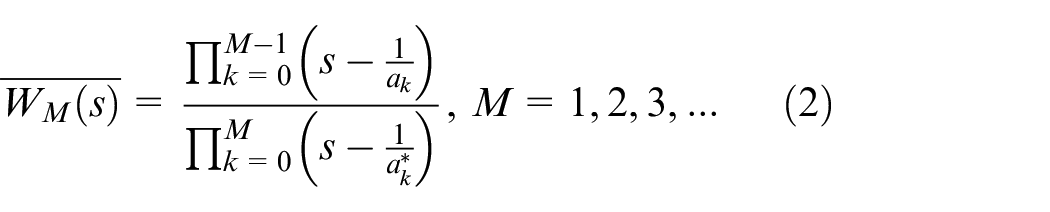
The generalized Malmquist functions, represented by (1) and (2) are orthogonal concerning the inner product defined in 49
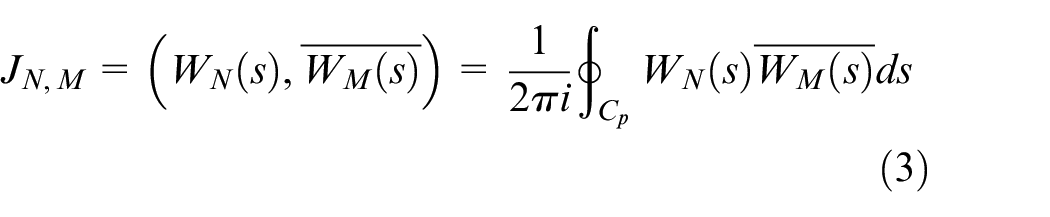
where the contour

that yields

where

The discrete-time orthogonal Malmquist functions are obtained by using transformation
as depicted in Figure 1.

Discrete Malmquist network.
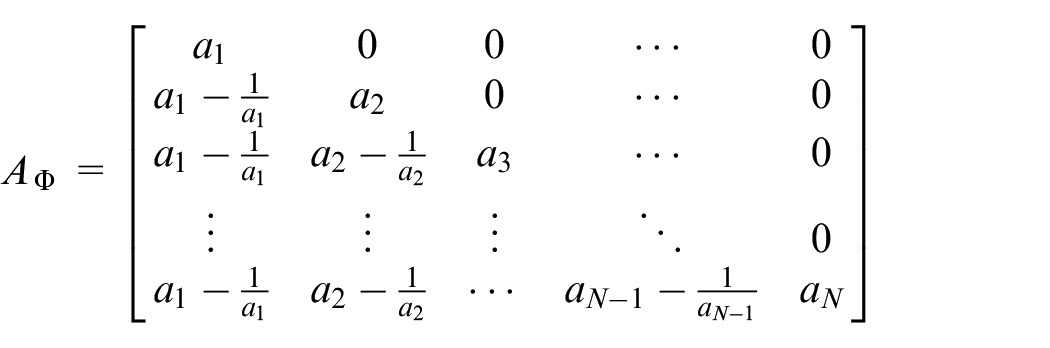
The inverse z-transform of the given Malmquist network does not yield a straightforward calculation of the Malmquist functions in the discrete-time domain. A more practical methodology for determining these functions entails employing a state-space representation of the networks thanks to their cascade form (Figure 1). Accordingly, the set of discrete-time Malmquist functions

where the matrix
Detailed explanations and proof of the orthogonality of the Malmquist functions can be found in Danković et al. 49 The next section provides the design procedure of MbMPC.
Predictive controller design
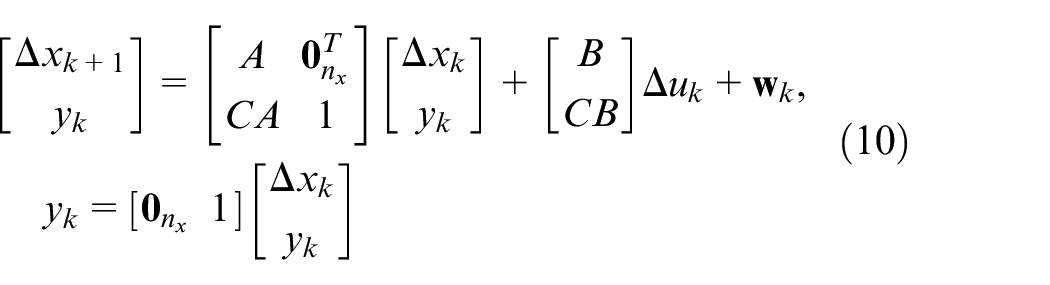
To design a predictive controller, the basic idea proposed herein is to approximate future control input trajectories by using the Malmquist functions and to optimize them by minimizing the cost function subject to the constraints. To accomplish that, a control input trajectory should have the form of an impulse signal, and that is why the augmented process model with embedded integrator has to be derived resulting in the control input increment
Plant model with embedded integrator
To design the MbMPC, the integral action is introduced into the linear discrete-time state-space SISO plant model described by

where
where

where
Unconstrained MbMPC design
The proposed MbMPC method is based on the approximation of the control input increments

where

where
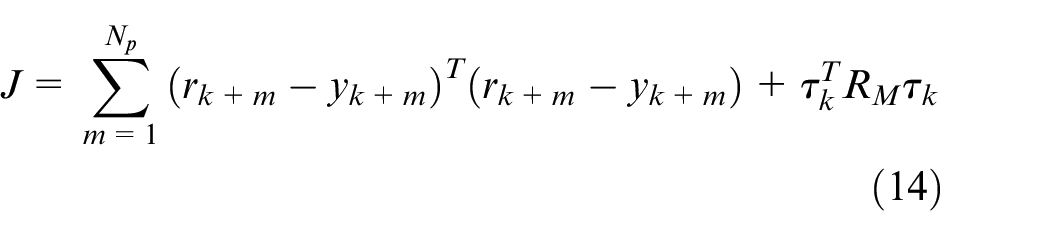
is minimized with respect to


the cost function (14) is reformulated as

where
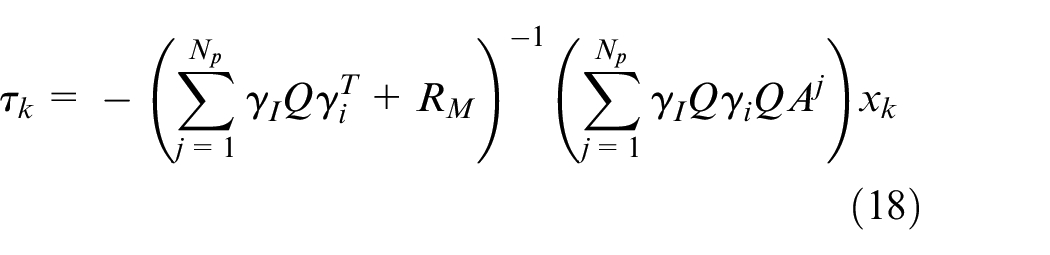
where
Constrained MbMPC design
In this case, the optimization problem is to find the optimal values of the Malmquist coefficients vector

where
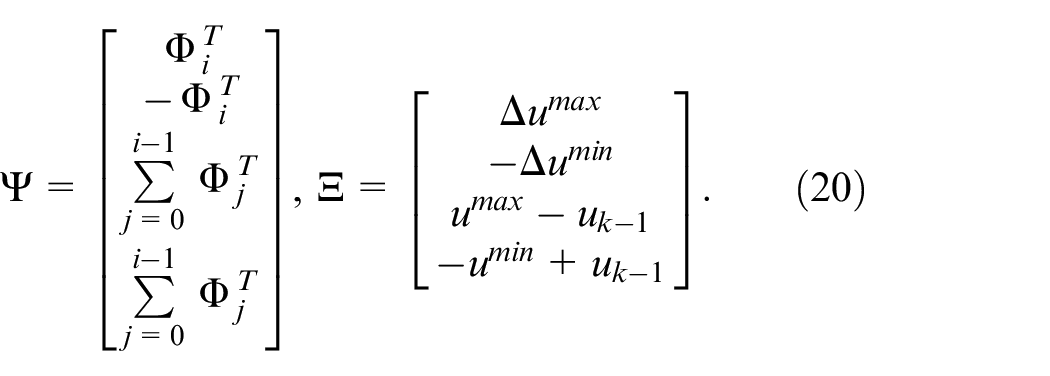
The defined constraints are linear in the decision variables providing the convexity of the cost function. This type of optimization can be handled by many optimization routines. Herein is used the Hildreth’s QP procedure.
52
This procedure first identifies active constraints and then introduce them in calculation of optimal decision variable
Tuning procedure of the proposed MbMPC
Based on the known approach, 52 the proposed MbMPC parameters may be tuned as follows.
Set the weighting matrices
Select values for
Finally, the value of parameter
Simulation and experimental results
The proposed MbMPC method is verified by using the modular DC motor servo system, 53 shown in Figure 2. The system’s components include a tachogenerator, a DC motor, an encoder, and an inertia load of 2 kg connected to the motor. This modular experimental setup enables real-time design and implementation of advanced control algorithms. It is connected to MATLAB/Simulink via a specific RT-DAC4/USB board, which transfers measured signals from the tachogenerator and encoder to the controller, as well as control signals to the power interface unit. The scaled input voltage is used to control the DC motor via a PWM signal, and the goal of our work is to control the angular position of the DC motor shaft.
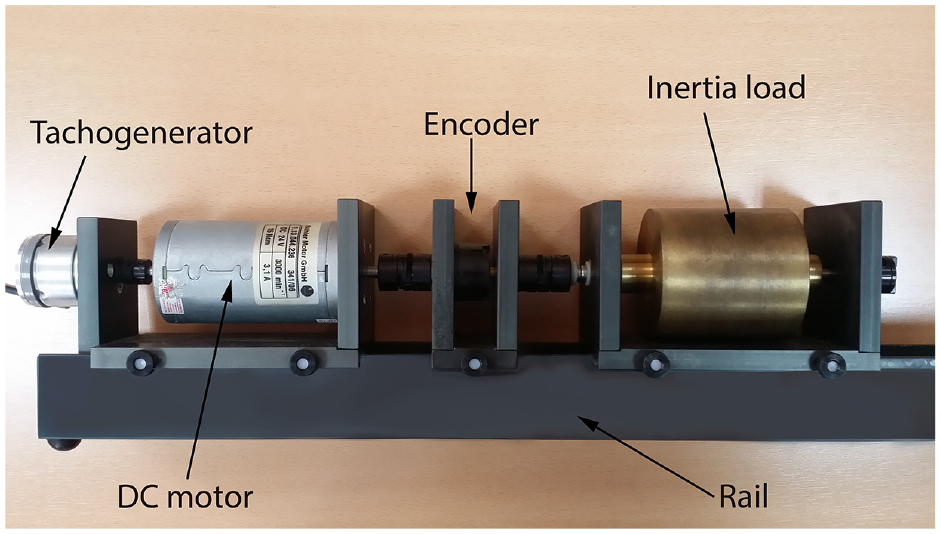
DC motor servo system setup.
This system is nonlinear, and the nonlinearity is expressed by Coulomb’s friction, described as

where

where
For design purposes of MbMPC, the following parameters are used following the tuning procedure given in the previous section. The weighting matrices are

The control signal constraints are defined by the system requirements, and we defined the constraints on control increment by our choice. The output signal is illustrated in Figure 3, representing the angular position of the DC motor servo system shaft. The system response to the reference signal is satisfactory, as the output signal effectively follows the reference signal. Figures 4 and 5 depict the control input increment and amplitude responses, respectively, showing that both signals satisfy the constraints (24).
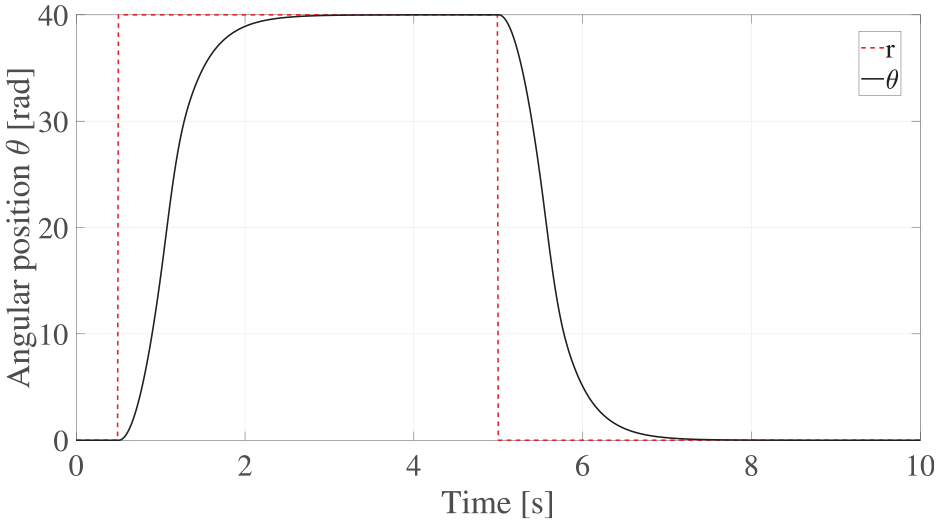
The angular position θ for proposed MbMPC (simulation results).
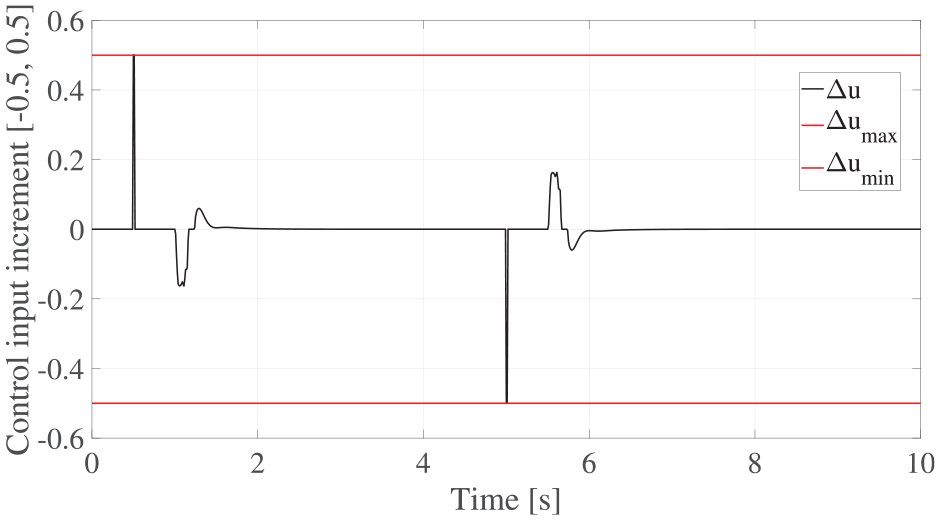
MbMPC input increment
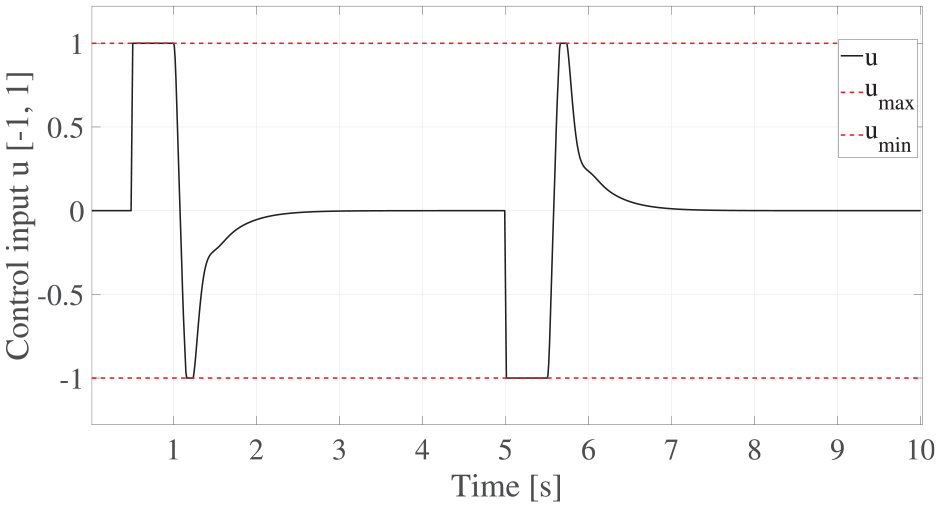
MbMPC input
Two sets of experiments are conducted, where the implementation of novel MbMPC is compared with the usage of LbMPC
22
in DC motor servo system design. In the first set, the number of terms for both control methods (MbMPC and LbMPC) is
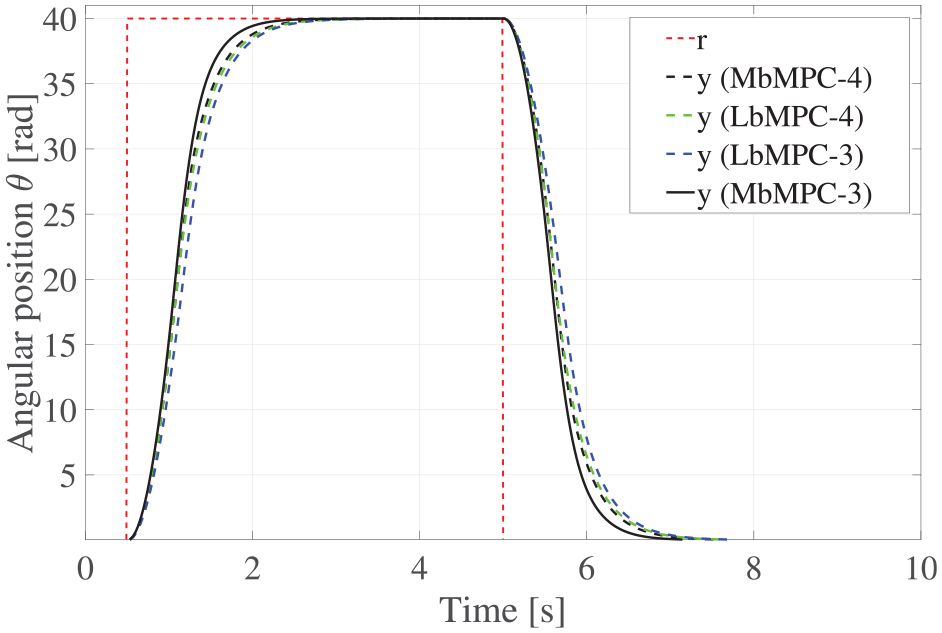
The angular position
For the second set of experiments, the number of terms is chosen to be
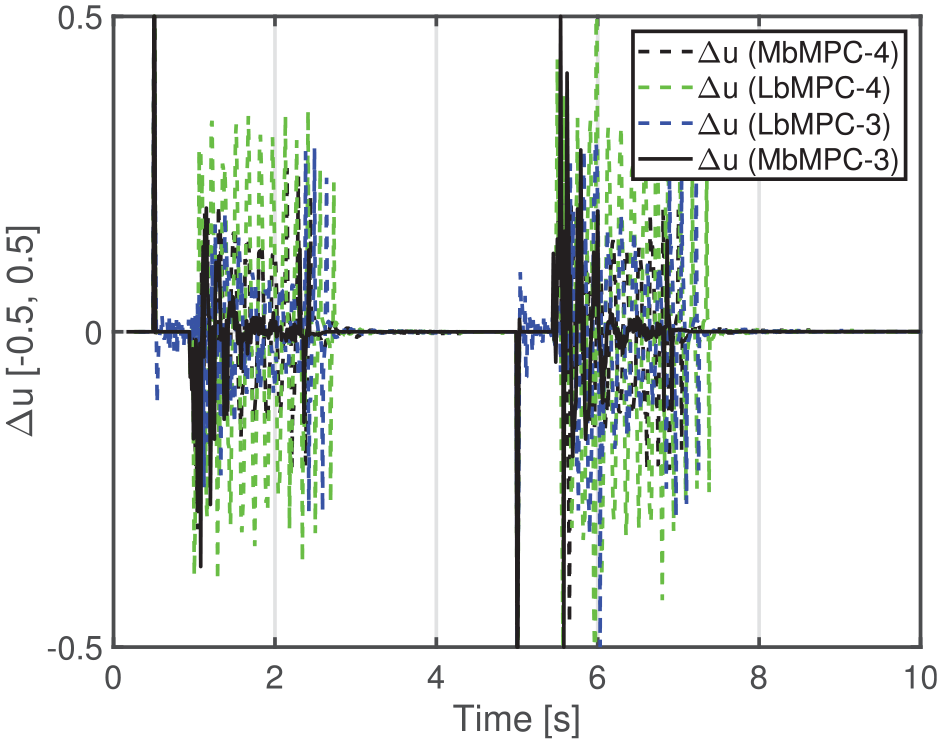
The control input increment
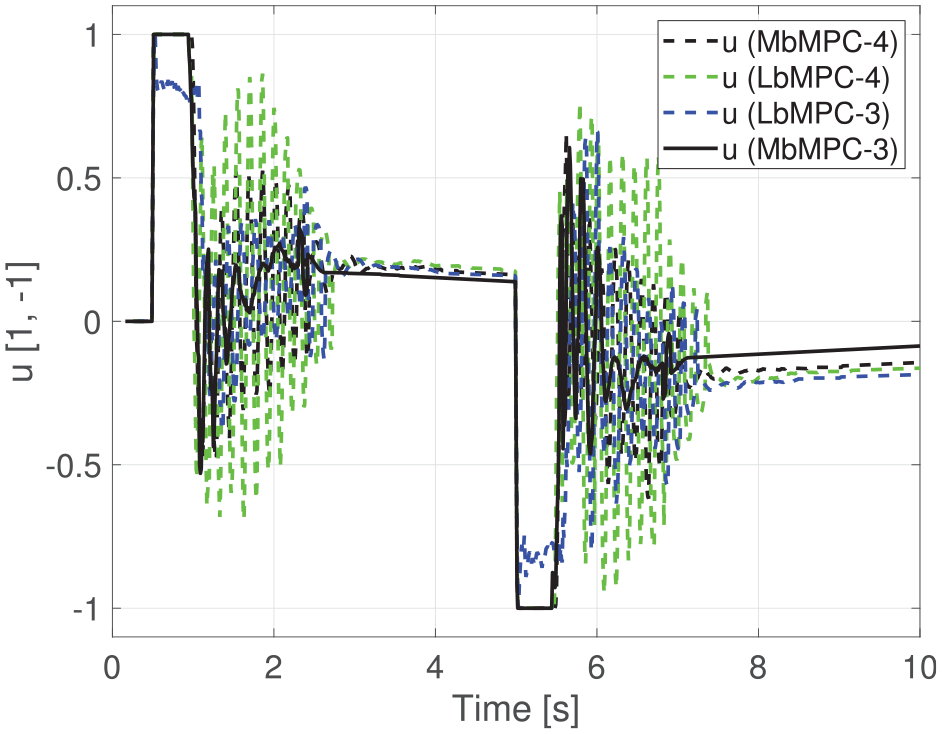
The control input
In order to show the improvement in reducing the calculation burden, the execution time of the online optimization routine has been measured for LbMPC and MbMPC approaches. The results obtained for
How prediction horizon
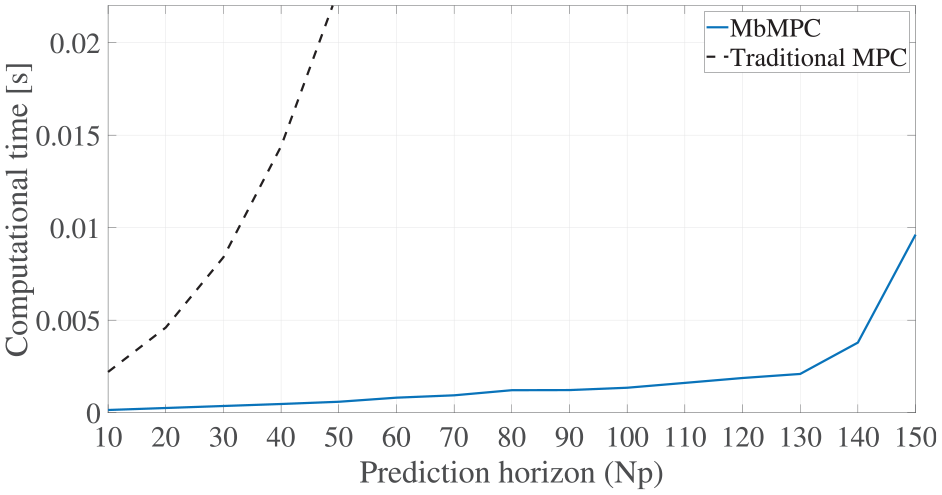
The average computational time (MbMPC,
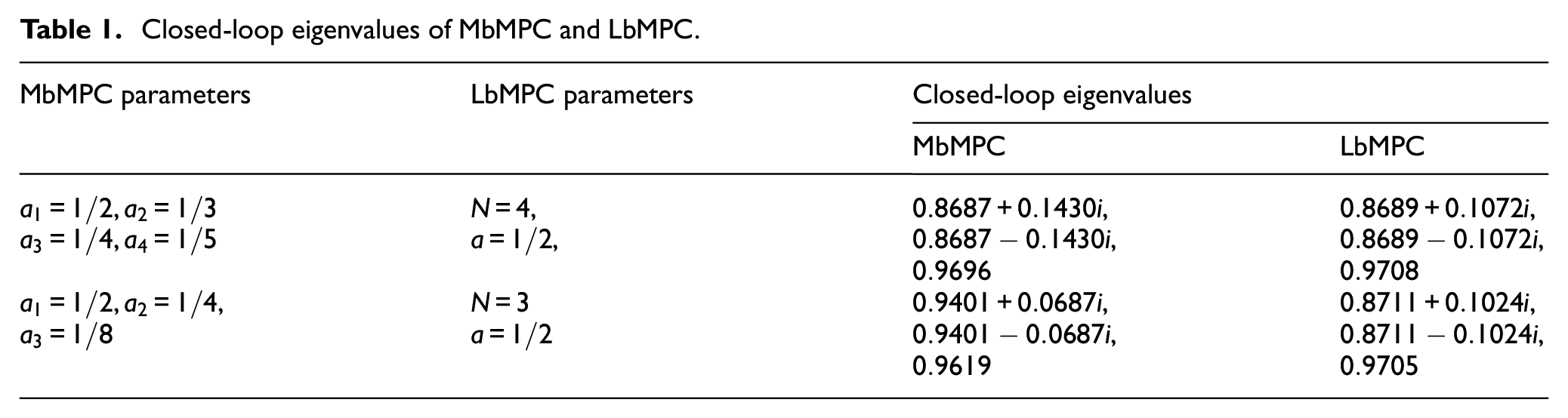
Table 1 presents the closed-loop eigenvalues of the DC motor servo system with both controllers, for the different values of MbMPC and LbMPC parameters. It shows how different and non-identical controller
Closed-loop eigenvalues of MbMPC and LbMPC.
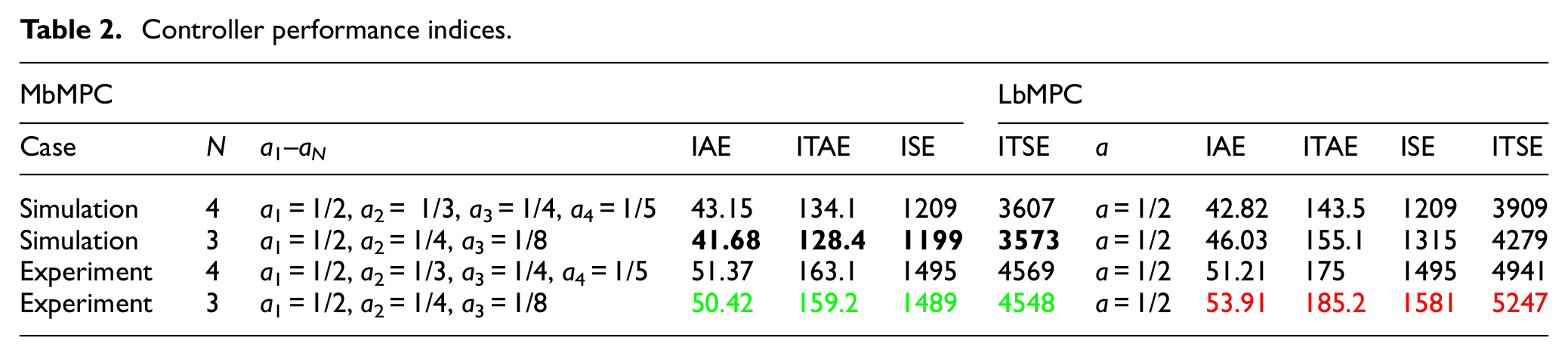
To examine the performance of the proposed MbMPC, several performance indices for simulation and experimental environment are calculated. These results are compared with the obtained LbMPC performance indices and summary is given in Table 2. The best performance indices are highlighted in black. It can be seen that simulation results for MbMPC when
Controller performance indices.
Conclusion
This paper describes the use of discrete-time Malmquist orthogonal functions, generated from the discrete-time Malmquist network, in the design of model predictive control (MPC). This results in a novel Malmquist functions based MPC (MbMPC). Thanks to the orthogonal properties of these functions, it is possible to approximate future control input increments over the prediction horizon. MbMPC uses a smaller number of terms for control input increment calculations, which directly affects calculation time which is critical for obtaining optimal solution of the constrained traditional MPC problem. It also improves the fine-tuning of system performances compared to Laguerre functions based MPC (LbMPC) due to different and non-identical set of controller parameters
The future work would be oriented to:
introducing some controller parameters tuning methods, such as the ones mentioned in the introductory section,
examination of the numerical stability of the algorithms such as developing MbMPC with a prescribed degree of closed-loop stability especially for a high number of states and MIMO systems,
examination of limitations on practical implementation in the scope of robust issues of the proposed MbMPC. To cope with this problem, the use of robust MPC, such as tube MPC with auxiliary sliding mode controller would be considered, 54
examination of the tube MPC methodology, where traditional nominal MPC is replaced by MbMPC as well as other robust MPC approaches.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Ministry of Science, Technological Development and Innovation of the Republic of Serbia [grant number 451-03-66/2024-03/200102].
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.