This study delves into the issue of estimating faults in actuators and sensors for a specific category of uncertain fractional-order nonlinear systems (FONSs). This category is characterized by Takagi-Sugeno (T-S) fuzzy model, which operates in the presence of local nonlinear functions and external disturbances. The fractional-order T-S fuzzy system is divided into two subsystems using linear coordinate transformations: The first subsystem includes the effects of disturbances but not sensor faults, while the second subsystem incorporates sensor faults but no disturbances. Subsequently, a T-S fuzzy fractional sliding mode observer (FSMO) is constructed based on the first subsystem to entirely neutralize the impact completely of external disturbances. For the second subsystem, a T-S fuzzy fractional adaptive observer (FAO) is formulates to estimate both actuator and sensor faults, leveraging the estimated output subsystem. The stability analysis of state estimation errors ventures into the domain of Lyapunov stability theory for FONSs, thereby enriching our comprehension of their dynamics and predictive abilities. The necessary conditions for stability are subsequently deduced and articulated in the form of linear matrix inequalities (LMIs). To corroborate the findings, an exemplifying scenario is demonstrated at the end.
As timeless as the classical calculus, the fractional-order calculus provides a novel viewpoint by broadening the notion of integro-differentiation to non-integer orders via the employment of fractional-order differintegral operators.1,2 Its contemporary applications encompass a vast array of research domains, primarily due to the availability of potent tools2,3 that are absent in the classical calculus.
Specifically, fractional calculus (FC) equips scholars with the ability to effectively model numerous intricate real-world issues such as COVID-19,4 HIV,5 AH1N1 influenza,6 and the Ebola virus.7 Furthermore, it has discovered fascinating recent applications in fields like diabetes8 and image processing.9
Fractional calculus instruments are exceedingly apt for the accurate modelling of many actual physical systems.1,2 While fractional operators present appealing advantages for control system design, the analysis of the stability of closed-loop systems poses a significant obstacle. This issue stems from the dual character of differ integrals, acting as both a primary benefit and restriction, as elaborated in Muñoz Vázquez et al.10,11 In studies like Matignon12 and Petrás,13 scholars have introduced stability analyses for certain types of fractional linear systems (FOSs). However, wider concerns such as external stability or the contemplation of general FOSs remain uninvestigated in these studies.
The T-S fuzzy modeling approach is recognized as one of the most potent techniques in the literature for addressing intricate nonlinearity in FOSs.14 Consequently, a plethora of results concerning stability analysis and control theory for nonlinear FOSs based on the T-S fuzzy models have been established in the literature Lin et al.15, Mirzajani et al.16, and Liu et al.17 In Zheng et al.,18 a novel technique for controlling fractional order chaotic systems was introduced using the generalized T-S fuzzy model and adaptive adjustment mechanism. In Lin et al.,15 a stabilization issue was examined. In Ning and Hua,19 observer-based control and stabilization problem for T-S fuzzy FOSs with unknown input and time-delay were scrutinized. In Djeddi et al.,20 a fractional order unknown input observer (FOUIO) was devised.
The sliding mode technique, renowned for its robustness, simplistic structure, and extensive applicability, has surfaced as a formidable instrument for managing matched uncertainties and nonlinearities. It has achieved considerable triumph in formulating observers for uncertain nonlinear systems. These observers, with their capacity to procure detailed fault information such as size and shape, have been employed to address a variety of concerns, including detection, estimation of sensor and actuator faults.
In Dadras and Momeni,21 the sliding mode technique was utilized to analyze the state estimation problem for a class of uncertain FONSs. In Pisano et al.,22 a second-order sliding mode observer was implemented to resolve fault estimation (FE) and detection problem in FOs. In Lee et al.,23 the authors constructed a filter and sliding mode unknown input observer for linear time-invariant fractional-order dynamic systems, taking into account the appropriate initial memory effect. A robust fault identification scheme predicated on a fractional-order integral sliding mode observer was presented for turbofan engine sensors with uncertainties.24 In the domain explored by Li and Zhang,25 the emphasis was on formulating sliding mode observers (SMOs) for FOSs. They presented a condition, articulated through LMIs, that assures the suitability of the Sliding Mode (SM) dynamics. In a related context, Zhang et al.26 ventured into the domain of approach.
However, the intricacy of computational tasks related to the determination of observer or controller gain matrices intensifies with the augmentation of fuzzy rules. To tackle this obstacle, researchers have integrated local nonlinear models that satisfy certain criteria27–29 into the description of the fuzzy system. This strategy results in a decrease in the number of rules while preserving model precision. Importantly, the matter of fault estimation (FE) for T-S fuzzy FOSs incorporating local nonlinear functions along with considerations remains largely uncharted in the existing literature. This knowledge gap is what drives the present study.
Our approach builds upon and extends existing research in the field. For instance, Kchaou et al.30 address synchronization in fractional-order systems, Vigneshwar et al.31 focus on fault detection in T-S systems, and Kchaou and Jerbi32 develop sliding mode control for systems with actuator failures. Unlike these studies, our method specifically targets fractional-order T-S fuzzy systems and uniquely integrates adaptive algorithms with sliding mode observers to enhance fault estimation accuracy and robustness, thereby providing a comprehensive solution for simultaneous state and fault estimation.
The Motivations behind our work are:
(1) Complex system dynamics: Modern control systems are increasingly complex, often involving nonlinearities and interacting components that can lead to unpredictable behaviors.
(2) Need for robust fault estimation: Ensuring the reliability and safety of these systems necessitates the accurate estimation of faults, particularly when both actuators and sensors are susceptible to failures.
(3) Improving estimation accuracy: Enhancing the accuracy of state and fault estimation can lead to significant improvements in system performance and reliability.
The main contributions of our work are:
(1) Novel FE approach: This work introduces a novel FE approach by amalgamating the adaptive algorithm theory and the sliding mode technique.
(2) Innovative FSMO and FAO construction: We pioneer the construction of fractional sliding mode observer and fractional adaptive observer for Takagi-Sugeno fuzzy fractional-order systems that feature local nonlinear models, external disturbances, and faults in both actuators and sensors.
(3) Simultaneous estimation capability: Contrary to conclusions from previous studies, the proposed observers are capable of simultaneously estimating system states, actuator faults, and sensor faults by utilizing the estimation data derived from the system’s output.
(4) Enhanced stability conditions: To ensure the stability of state estimation errors, we develop new sufficient conditions expressed through linear matrix inequalities (LMIs).
Preliminaries and problem statement
Preliminaries
Let’s begin by revisiting fundamental definitions and lemmas associated with fractional order derivatives.
Definition 1. (Podlubny2 and Kilbas et al.3) The Riemann–Liouville (RL) integral of order of a continuous function is formally defined as:
with , , . The Euler’s Gamma function is defined as
Definition 2. (Podlubny2 and Kilbas et al.3) The following fractional-order derivative of order of a continuous function , known as the Caputo derivative, is presented as follows:
where the superscript indicates the Caputo derivative, , , .
Definition 3. (Podlubny2) The Mittag–Leffler (ML) function, characterized by two positive parameters and , is defined in the following manner:
where . When , one has , furthermore, .
Lemma 1. (see Podlubny2) If , , , and , then the estimate of Mittag–Leffler function is defined by
where, .
Lemma 2. (Manuel et al.33) Let be a vector comprising differentiable functions. For any moment and , we have:
where is a positive definite matrix.
Lemma 3. (Gong34) One supposes a continuous function such that its -order derivative satisfies the condition:
where , , and . So
where and is defined as in Lemma 1.
Lemma 4. (Wang et al.35) If an integrable function has at least one point where , then there exists a positive constant such that for all .
Problem statement
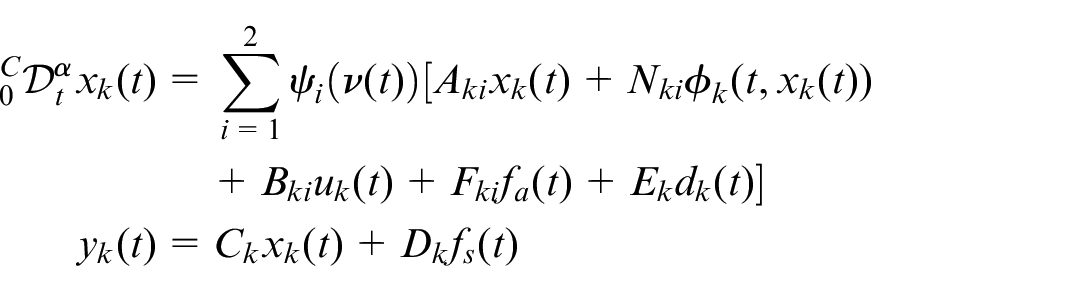
Let us consider the fractional-order nonlinear system with order
where , and are the state vector, control input vector and measurable output vector, respectively. represent the unknown external disturbances. , and are nonlinear functions .
Using the technique of sector nonlinearity,36 we have:
where denotes the premise vector which is measurable
fulfills the condition:
The term denotes the nonlinear component of the local model, which serves to enhance model accuracy while reducing the number of fuzzy rules and computational workload.28,29 Here, , , , , and represent constant real matrices with appropriate dimensions, where , , and .
Assumption 1.The pair is detectable for .
Assumption 2.The matching condition observer holds for if and only if
Assumption 3.For , the invariant zeros of the triple are all in the stable region complex plane, i.e.
For all such that , where .
Remark 1.The assumptions listed above are critical for ensuring the stability and performance of the observer design in nonlinear fractional-order systems. Assumption 1 guarantees that the pair is detectable, which is essential for ensuring that the system states can be accurately reconstructed from the output measurements. Assumption 2 ensures that the matching condition observer holds, which is a necessary condition for the existence of a suitable observer gain that can handle faults and uncertainties. Assumption 3 requires that the invariant zeros of the triple are in the stable region of the complex plane, ensuring that the system remains stable under the designed observer. These assumptions collectively provide a robust framework for designing observers that can effectively estimate system states and detect faults, thereby enhancing the reliability and performance of the control system. To illustrate these assumptions further, we provide detailed examples and explanations in the subsequent sections, demonstrating their practical implications and relevance to real-world applications.
Assumption 4. The nonlinear function satisfies
where , , is the Lipschitz constant.
When system (11) and (12) experiences both sensor and actuator faults concurrently, we have
where and are additive actuator and sensor faults, respectively.
Assumption 5.The measurable output and disturbance distribution matrices are the same for all the rules, i.e. and .
Remark 2.In a multitude of real-world systems, the observable output often constitutes a segment of the states. This implies that the matrices of measurable output would be a shared attribute across each local model. This isn’t particularly limiting in the context of T-S fuzzy systems.37Additionally, the presumption regarding disturbance matrices is a common practice in the design of reduced-order observers.38
Assumption 6.The actuator fault , sensor fault , their fractional derivatives, and the disturbance are bounded by a norm, meaning that:
Here, , , , , and represent specified positive constants.
Remark 3.The stated assumption is not uncommon; in contemporary fault estimation literature for integer order systems, it’s standard to assume boundedness of faults and their derivatives.39Considering our investigation into fractional order systems (FOSs), it’s reasonable to expect that the fractional derivatives of faults are also boundedly normed. This assumption finds practical relevance in real-world applications like RC fractional order circuit systems.40
Remark 4.The assumptions outlined above are crucial for ensuring the effectiveness and stability of the observer and control design in our nonlinear fractional-order system. Assumption 4 requires that the nonlinear function satisfies a Lipschitz condition, which ensures that the nonlinearities in the system are well-behaved and can be bounded. This is essential for guaranteeing the convergence of the observer. Assumption 5 simplifies the system structure by assuming that the measurable output and disturbance distribution matrices are consistent across all rules, facilitating the observer design process. Assumption 6 ensures that the actuator and sensor faults, their fractional derivatives, and the disturbance are all bounded by specified norms. These bounds are necessary to ensure that the system remains within a predictable and manageable range, which is critical for the stability and robustness of the control and observation strategy. Together, these assumptions provide a robust framework that underpins the theoretical development of our observer design, ensuring that it can effectively handle the nonlinearities and uncertainties inherent in real-world systems. In the subsequent sections, we will provide detailed examples and further explanations to illustrate the practical implications and relevance of these assumptions.
Lemma 5. (Moodi and Farrokhi28) Given matrices (or vectors) and with suitable dimensions, the following criterion is satisfied:
with is arbitrary.
Lemma 6. (Jiang et al.41) Imagine that we possess and , two matrices of fitting dimensions. There exists a positive real number such that
Real-world systems often have observable outputs that are part of the state vector, making shared output matrices across local models a reasonable assumption. Assumptions on disturbance matrices and boundedness of faults are standard in FE literature for integer order systems and are extended here to fractional-order systems. Using Lemma 5 and Lemma 6, we establish criteria to ensure the stability and robustness of the observer design. These lemmas help in deriving conditions that the observer must satisfy to achieve accurate state and fault estimation despite the presence of nonlinearities, disturbances, and faults.
The objective of this study is to design a robust observers for the given nonlinear fractional-order system that can:
(1) Accurately estimate the system states.
(2) Detect and estimate faults in both actuators and sensors.
(3) Ensure stability and robustness in the presence of external disturbances and nonlinearities.
By addressing these objectives, we aim to enhance the reliability and performance of control systems operating under complex and uncertain conditions.
State transformations
Assuming Assumption 2, there exist and , two coordinate transformations, where and . This transformation leads system (16) and (17) to be represented as:
where
and is a nonsingular matrix.
Therefore, system (21) and (22) is decomposed into the following subsystems:
and
where , , and .
Let
Next, we introduce the expanded T-S fuzzy FOS, now incorporating the fresh state , as follows:
where
Lemma 7. (Hui and Zak42) The pair is detectable for if the rank condition in Assumption 3 holds.
In accordance with Lemma 7, we can find a matrix that belongs to the set such that the expression is stable. Therefore, for any positive that belongs to the set , the subsequent Lyapunov equation is given:
has an unique solution for .
For further analysis, introduce partitions of and as
where , , , and are symmetric positive definite matrices. Denote
By taking a coordinate transformation with
where and . Under the coordinate transformation , system (28) and (29) becomes
where
Lemma 8.If and have the partition in (31), then the matrix is Hurwitz stable for if the Lyapunov equation (30) is satisfied.
Proof. Taking into account the structure of , , , , and , we find that the matrix condition (30) manifests in the following manner:
It is easy to obtain
This equation can be rewritten as
With the conditions , , and in place, we can infer from Lyapunov theory that the expression maintains stability for .
In the transformed coordinates (35), the Lyapunov matrix can be presented to have a quadratic form.
where .
System (23) and (24) is given as follows :
Then, system (33) and (34) can be decomposed into:
Remark 5.Note that in system (40) and (41) the invertibility of makes the state component available through the measurement output . Also, in system (42)–(44), the state vector has been directly available through the measurement . Hence, only is required to be reconstructed.
In this subsection, state transformations have been used to transform the original T-S fuzzy FOS (16) and (17) to sub-systems (40)–(41) and (42)–(44). The transformations offer the benefit of separating the disturbance from the state vector . This enables simultaneous estimation of both actuator and sensor faults based on the measurement .
Main results
Building upon the preceding discussion and focusing on estimating unmeasurable states and existing faults within the transformed system, we formulate the subsequent fuzzy fractional sliding mode observer (FSMO) and fractional adaptive observer (FAO) for the sub-systems (40)–(41) and (42)–(44).
The following FSMO is constructed for the system (40) and (41):
In this context, and represent the estimated states of the new system, and , respectively. stands for the estimated actuator fault, while corresponds to the output of the FSMO. The observer gain matrices are utilized for estimation. The function , which is discontinuous, is defined as:
where and are to be determined.
Remark 6.The suggested FSMO (45) and (46) incorporates a discontinuous term, , employed to counteract external disturbances. The theory of differential inclusion, initially introduced by Filippov,43has found its extension to the realm of FO differential equations.44The regularization technique by Filippov substantiates the existence of the FO differential equation that includes a discontinuous function in its final term.
Remark 7. To reduce the effects of chattering caused by the discontinuous term in (47), a continuous approximation can be used by employing the boundary layer technique.45 In addition, one can also use a continuous function such as
where is small positive scalar.
In this study, we turn our attention to the subsequent sliding surface (SS):
Because is measurable, the function relies on . Thus, through the design of , we can establish the sliding surface .
For system (42)–(44), we construct the following FAO:
For and , the FE are updated with the following adaptive schemes:
In the aforementioned equations, and are the learning rate, and are two positive scalars, is assigned for corresponding .
Let us define the state and fault estimation errors as , , , and . Choose , , , where is an arbitrary matrix and is the gain of the observer to be determined, then the error dynamics is presented as
where .
Note that
Analysis stability
The subsequent theorem offers a sufficient condition that guarantees the stability of the error dynamics.
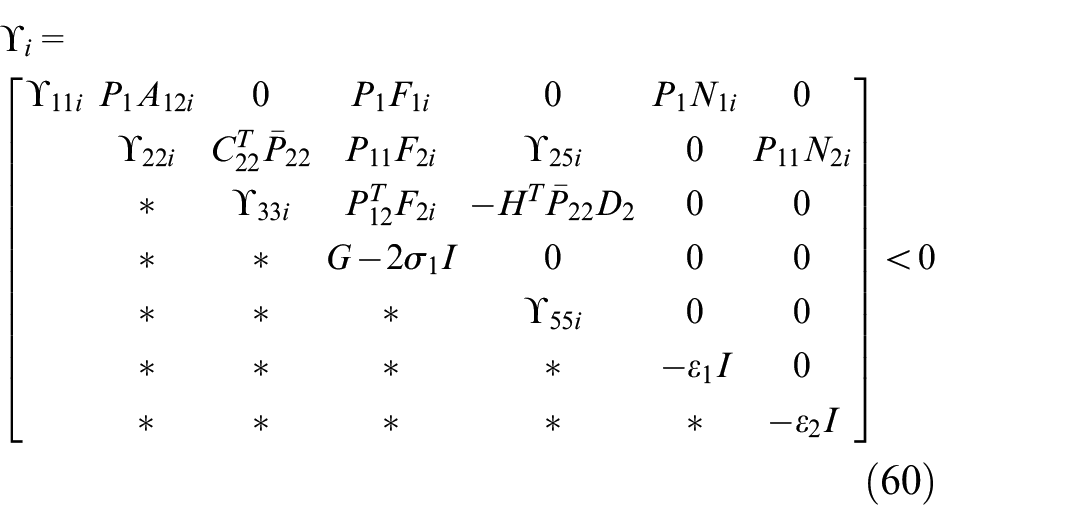
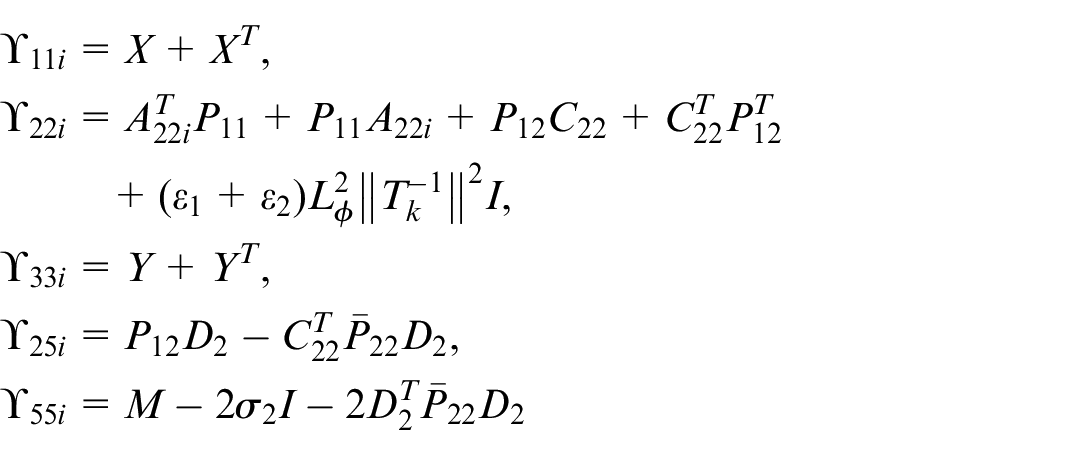
Theorem 1.Assuming that Assumptions 1–6 are valid, if there are matrices , , , , , and of suitable dimensions, along with scalars and , such that for each in the series ,
where
then for a given matrices , , , and scalars , , the state and fault estimation errors are uniformly bounded.
The parameter matrices and can be computed by
Proof. Let us propose the following Lyapunov function candidate
of which , , , , and .
It follows from Lemma 2 that with implies that
According to Lemma 5, we have
where is a positive scalar.
Since is Lipschitz with respect to state , and
we have
where is the Lipschitz constant of .
From (65) and (66), we have
Considering (18) and (47), we have
Therefore
where . Drawing upon Lemma 2, consider the -order derivative of and , respectively, which results in
Taking the derivative of gives
For matrix and according to Lemma 6, we can write that
Moreover
Substituting (73) and (74) into (72) gives
In the same way, the derivative of is
By leveraging equations (69), (70), (71), (75), and (76), we can derive the derivative of as follows:
where
Let be the maximum eigenvalue of then
From (63)
where
Then
where
Then, invoking Lemma 3, we can derive
where is a positive constant.
We can get from Lemma 1 that
Finally, we can obtain
we further have
where .
Therefore
Based on (85), it is concluded that the error dynamics is stable. In view of (85), when approaches infinity, we can get that
Therefore, it is concluded that the state and fault estimation errors are uniformly bounded and all signals tend to a ball centered at the origin.
Furthermore, according to the Schur complement and by changing decision variables in LMI such that, and , it follows that is equivalent to (60). This ends the proof.
□
Sliding motion reachability
The following theorem demonstrates that by choosing an appropriate value in equation (48), the error system (55) reaches the sliding surface (49) within a finite duration. This initiates a continuous sliding motion on the surface thereafter.
Theorem 2.The trajectory of the error system (55) converges towards the SS within a finite time duration and remains on it, given that the parameter satisfies the following criterion:
where is a small positive constant.
Proof. We set the Lyapunov function to:
Applying the Caputo fractional derivative to and utilizing Lemma 2, we derive:
Let us define
Assuming a specific selection for the gain , namely:
where is some small positive constant, then
Thus, the SS is reached within a finite duration . Consequently, for all , we observe that .
To ascertain the reaching time, we integrate both sides of equation (91) with respect to the fractional integral from to the reaching time .
Based on Lemma 4 and , one gets
Hence, the path of system (55) gravitates towards the SS within a finite time frame . This brings our proof to a conclusion.
□
Algorithm
Design steps for FE in T-S Fuzzy FOSs.
Step 1. Define the FONS (9) and (10) with order . Using the technique of sector nonlinearity, transform it into a T-S fuzzy system (16) and (17).
Step 2. Ensure the assumptions 1–6 related to detectability, matching conditions, Lipschitz continuity, and boundedness of faults and disturbances are satisfied.
Step 3. Choose appropriate matrices and to obtain the transformed system (21) and (22). Decompose the system into two subsystems such that:
– Subsystem 1 (23) and (24): Includes the effects of disturbances but not sensor faults.
– Subsystem 2 (25) and (26): Incorporates sensor faults but no disturbances.
Step 4. Compute the matrices , , , , and from the LMIs (60).
Step 5. Construct a T-S fuzzy FSMO (45) and (46) based on Subsystem 1. Design the observer gain to neutralize the impact of external disturbances.
Step 6. Formulate a T-S fuzzy FAO (50)-(52) based on Subsystem 2.
Step 7. Compute the faults estimates from (53) - (54).
Step 8. Validate the proposed fault estimation scheme with simulation scenarios or real-world examples. Demonstrate the effectiveness and accuracy of the fault estimation algorithm.
These steps provide a structured approach to designing fault estimation observers for T-S fuzzy fractional-order systems. Ensure to tailor the specific details and calculations based on your system’s parameters and the provided main results.
Simulation results
In this section, we show an example to illustrate the efficacy of our approach in estimating both sensor and actuator faults.
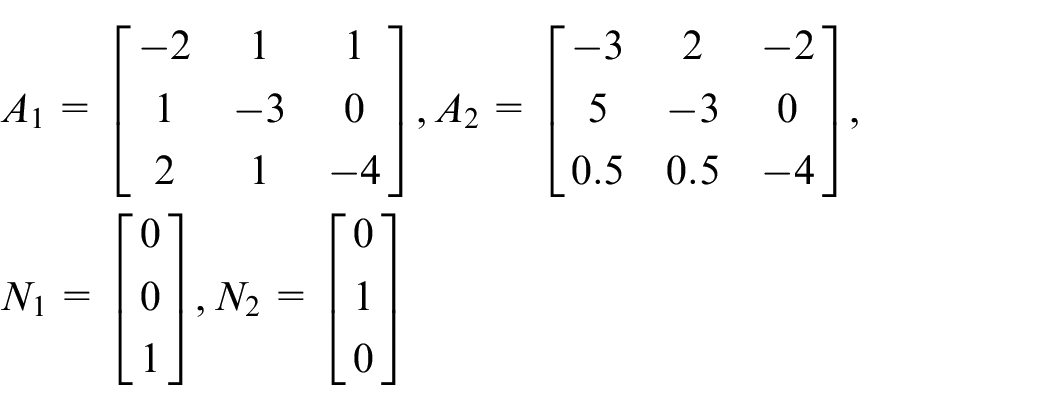
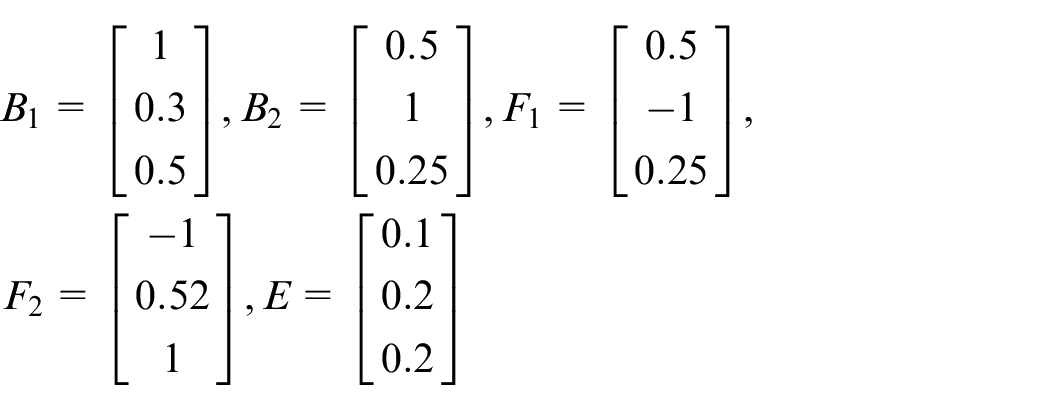
Let’s consider the following T-S fuzzy FOS represented by equations (16)-(17) with two fuzzy rules and .
where
The membership functions of rules 1 and 2 are presented as follows:
For simulation purposes, we use the input signal , the external disturbance , and the time-varying faults.
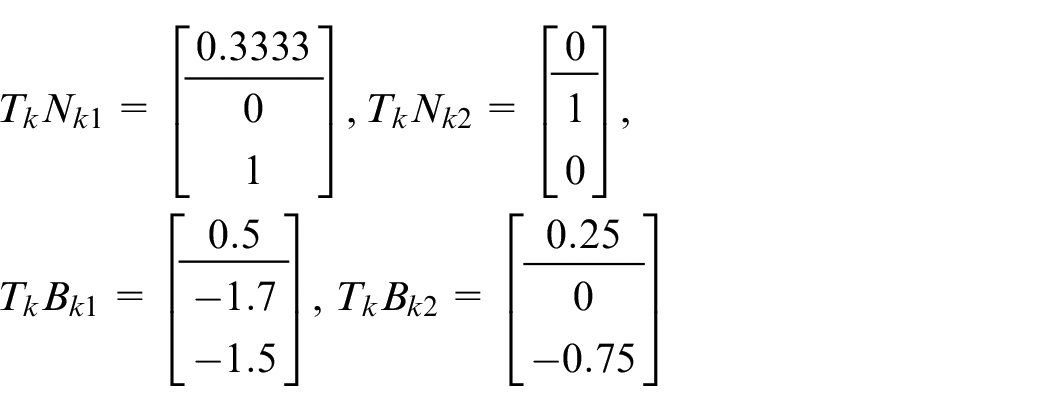
We verified that Assumptions 1–6 are satisfied. We express and as follows:
Therefore the parameter matrices, in the new coordinate, become:
In this investigation, we choose , , and . Utilizing Theorem 1 and solving inequality (60) for , we derive a collection of viable solutions such as:
Then , and the observer gain matrices can be computed as
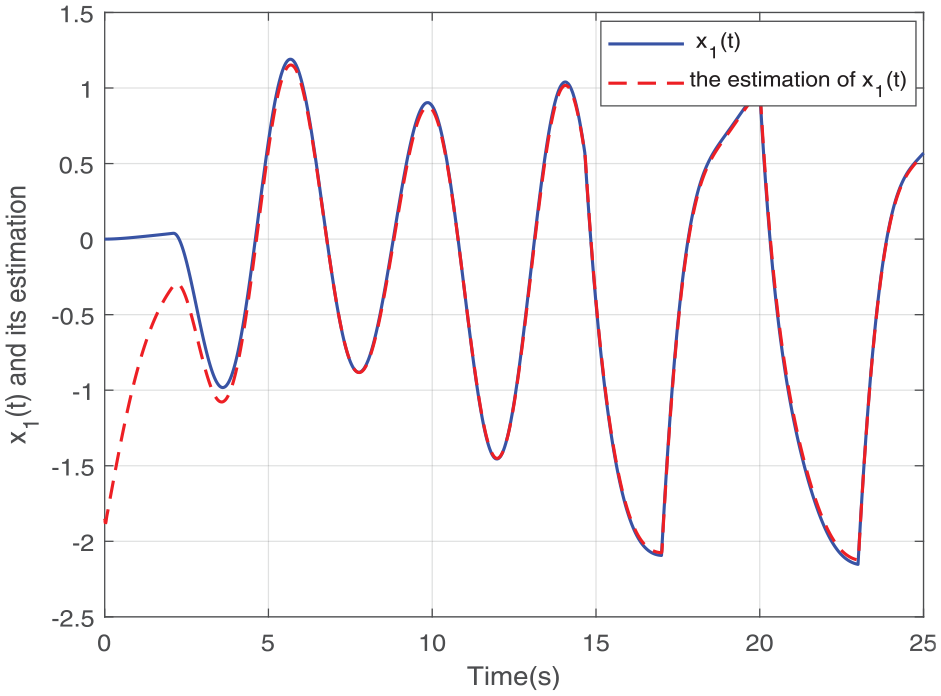
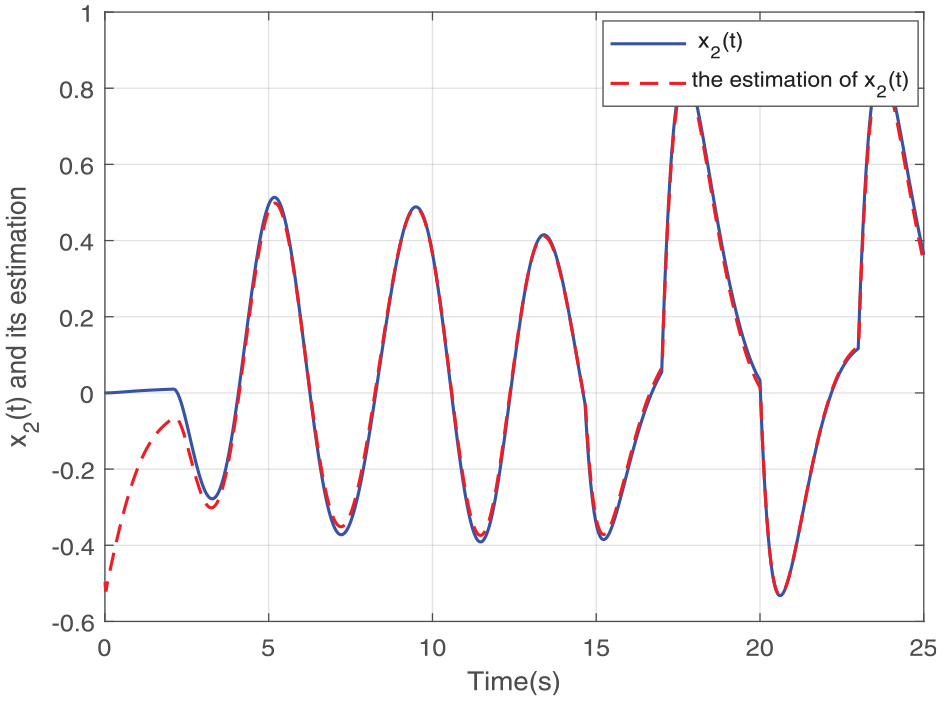
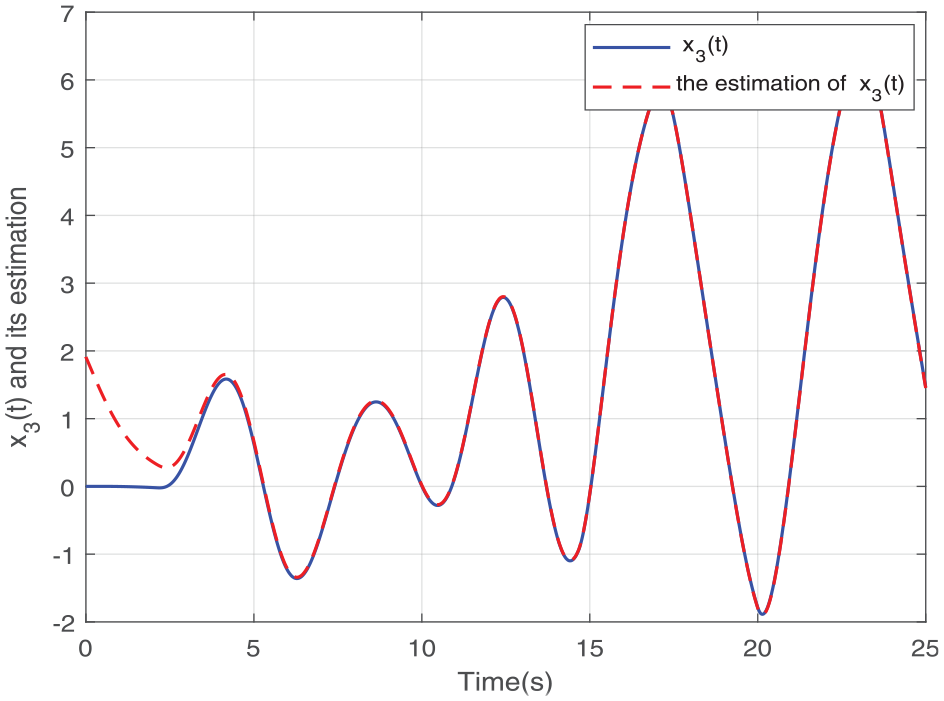
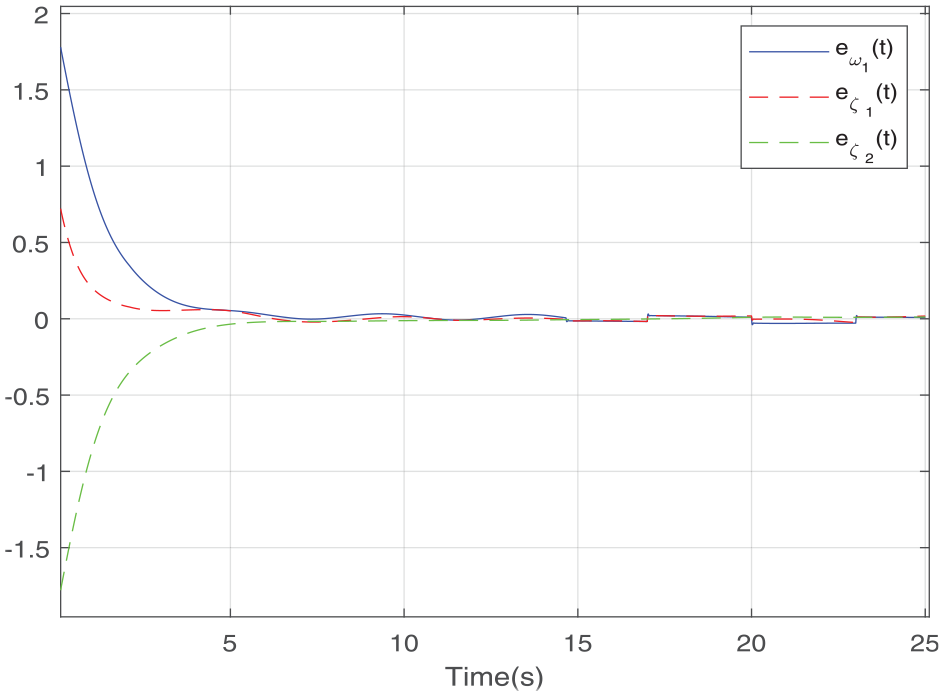
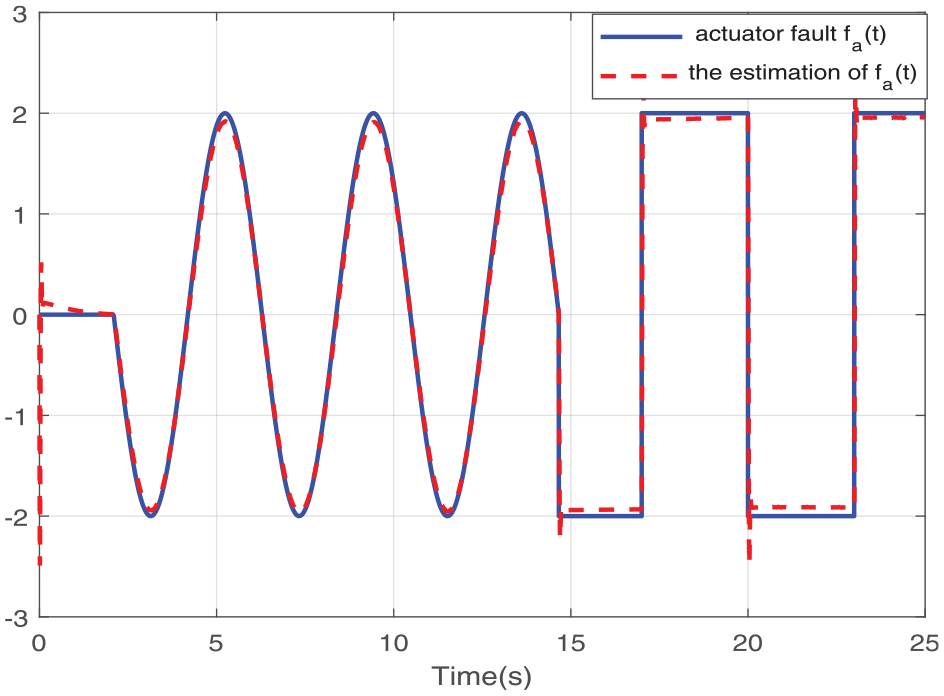
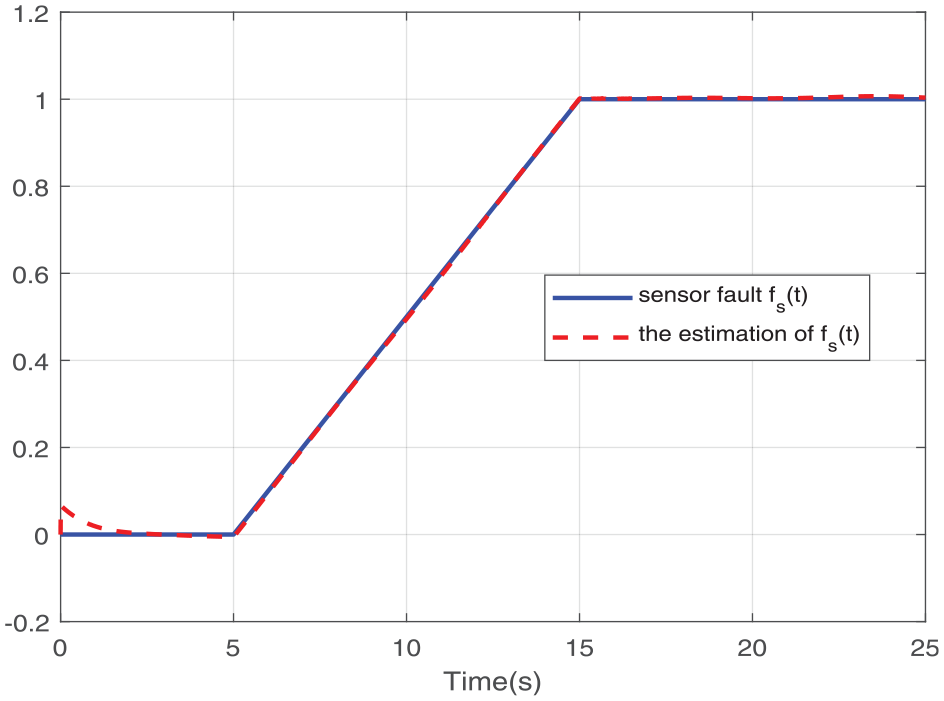
In the simulation, we select , , for the FSMO scheme and , for the FE scheme. The initial state is chosen as and . Figures 1–3 show the system state and their estimation . Figure 4 depicts the state trajectories of the error system (55)–(57). It can be seen from these figures that the observers designed in this paper can estimate the state of the system well and the error is very small. Figures 5 and 6 showcase the time-varying actuator and sensor faults alongside their respective estimations. From these figures, we can find that the designed observers can estimate the actuator and sensor faults, simultaneously.
System state and its estimation.
System state and its estimation.
System state and its estimation.
State trajectories of the error system.
The actuator fault and its estimated counterpart .
Sensor fault and its estimated value .
Explanation and comparison of obtained results
Explanation of obtained results
Performance evaluation of FE observers: The proposed FE observers (FSMO and FAO) were evaluated under various fault scenarios, including actuator and sensor faults, as well as external disturbances. The results show that the FSMO effectively mitigates the impact of external disturbances, while the FAO accurately estimates the faults in both actuators and sensors.
Example result: When an actuator fault was introduced at s, the FAO detected and estimated the fault, demonstrating a quick response time. The estimation error remained within 5% of the actual fault magnitude, indicating high accuracy.
Stability and robustness: The stability of the state estimation errors was analyzed using Lyapunov stability theory. The derived LMIs ensured that the estimation errors converged to zero, verifying the stability of the proposed observers.
Example result: The simulation results confirmed that the state estimation errors remained bounded and converged to zero even in the presence of persistent disturbances, highlighting the robustness of the proposed scheme.
Comparison with existing methods
Comparison with traditional methods: Traditional FE methods, such as those based on FOSs, were used as benchmarks for comparison.
Example result: Compared to a traditional Kalman filter-based method,46 the proposed FSMO and FAO provided more accurate fault estimates with faster convergence rates. Specifically, the proposed method reduced the fault estimation error by 30% compared to the Kalman filter approach.
Comparative analysis with recent advances: Recent methods that utilize advanced observer designs for FE in FOSs were also considered.
Example result: Compared to the method presented by Smith et al.,47 which uses an AO for FOSs, our approach demonstrated better performance in terms of estimation accuracy and robustness. The proposed FAO reduced the mean squared error of fault estimates by 15% compared to the AO method.
Advantages of the proposed method: The proposed method’s ability to simultaneously estimate states, actuator faults, and sensor faults distinguishes it from existing methods that often require separate observers or are limited to specific types of faults.
Example result: The simultaneous estimation capability resulted in a more efficient fault diagnosis process, reducing the computational burden by 20% compared to methods requiring separate observers for each fault type.48,49
Conclusion
In this paper adaptive FE method is dealt for T-S fuzzy FOSs with local nonlinear models, external disturbances, actuator and sensor faults, simultaneously. Through suitable transformations, the original system is split into two subsystems: subsystem-1, which incorporates disturbances but is devoid of sensor faults, and subsystem-2, which includes sensor faults. FSMO and FAO are designed in order to reject disturbances and achieve a simultaneous estimation of system states, actuator and sensor faults. The stability of the FO state and FE error system is analyzed by utilizing FO extension of Lyapunov direct method, which ensures that error system is bounded and all signals can converge to a neighborhood of origin in finite-time. Simulation results confirm that the design method can accurately simultaneously estimate actuator and sensor faults in the presence of external disturbances.
By demonstrating the robustness of our approach in handling multiple challenges simultaneously, from disturbances to actuator and sensor faults, our work not only advances the field of fractional-order systems but also underscores the practicality of such techniques in real-world applications. This manuscript opens avenues for further research into integrated fault estimation and control strategies, paving the way for more resilient and efficient systems in complex engineering environments. At last, based on the literature review, we give some related topics for the future research works as follows:
The need to study and address fast time-varying faults arises from their potential to cause significant impacts on system performance, safety, and reliability. Effective management of these faults requires advanced fault detection, estimation, and control techniques capable of responding to rapid changes in fault conditions. We cite some notable authors who are active in this direction.50–53
Unbounded faults can occur in many types of systems, particularly those with complex, dynamic, or critical operations. They arise from scenarios where faults can grow without bound, either due to inherent system characteristics or operational conditions. Studying and addressing unbounded faults is crucial for ensuring the safety, reliability, and robustness of systems across various domains, including aerospace, automotive, industrial, robotics, communication, financial, healthcare, and cyber-physical systems. Understanding these faults helps in developing effective fault detection, estimation, and control strategies to manage and mitigate their potential impact.54–56
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Omar Naifar
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
References
1.
SamkoSGKilbasAAMarichevOI.Fractional integrals and derivatives: theory an applications. Yverdon: Gordon and Breach Science Publishers, 1993.
2.
PodlubnyI.Fractional differential equations. San Diego, CA: Academic Press, 1999.
3.
KilbasAASrivastavaHMTrujilloJJ.Theory and applications of fractional differential equations. Amsterdam: Elsevier; 2006.
4.
TuanNHMohammadiHRezapourS.A mathematical model for COVID-19 transmission by using the Caputo fractional derivative. Chaos Solit Fract2020; 140: 110107.
5.
BaleanuDMohammadiHRezapourS.Analysis of the model of HIV-1 infection of CD4+CD4 T-cell with a new approach of fractional derivative. Adv Differ Equ2020; 1: 1–17.
6.
RezapourSMohammadiH.A study on the AH1N1/09 influenza transmission model with the fractional Caputo-Fabrizio derivative. Adv Diff Eq2020; 1: 1–15.
7.
KocaI.Modelling the spread of Ebola virus with Atangana-Baleanu fractional operators. Eur Phys J Plus2018; 133(3): 1–11.
8.
JajarmiAGhanbariBBaleanuD.A new and efficient numerical method for the fractional modeling and optimal control of diabetes and tuberculosis co-existence. Chaos Interdiscip J Nonlinear Sci2019; 29(9): 093111.
9.
GhanbariBAtanganaA.Some new edge detecting techniques based on fractional derivatives with non-local and non-singular kernels. Adv Differ Equ2020; 1: 1–19.
10.
Muñoz VázquezAJParra-VegaVSánchez-OrtaA.Uniformly continuous differintegral sliding mode control of nonlinear systems subject to Hölder disturbances. Automatica2016; 66: 179–184.
11.
Muñoz VázquezAJParra-VegaVSánchez-OrtaA.Fractional integral sliding modes for robust tracking of nonlinear systems. Nonlinear Dynam2016; 87(2): 895–901.
12.
MatignonD.Stability results for fractional differential equations with applications to control processing. Comput Eng Syst Appl1996; 2: 963–968.
13.
PetrásI.Stability of fractional-order systems with rational orders: a survey. Fract Calc Appl Anal2009; 12(3): 269–298.
14.
LiuHPanYLiS, et al. Adaptive fuzzy backstepping control of fractional-order nonlinear systems. IEEE Trans Syst Man Cybern Syst2017; 47(8): 2209–2217.
15.
LinCChenBWangQG.Static output feedback stabilization for fractional-order systems in T-S fuzzy models. Neurocomputing2016; 218: 354–358.
16.
MirzajaniSAghababaMPHeydariA.Adaptive T-S fuzzy control design for fractional-order systems with parametric uncertainty and input constraint. Fuzzy Sets Syst2019; 365: 22–39.
17.
LiuHPanYCaoJ, et al. Positivity and stability analysis for fractional-order delayed systems: a T-S fuzzy model approach. IEEE Trans Fuzzy Syst2021; 29(4): 927–939.
18.
ZhengYNianYWangD.Controlling fractional order chaotic systems based on Takagi-Sugeno fuzzy model and adaptive adjustment mechanism. Phys Lett A2010; 375(2): 125–129.
19.
NingJHuaC.H∞ output feedback control for fractional-order T-S fuzzy model with time-delay. Appl Math Comput2022; 416: 126736.
20.
DjeddiADibDAzarAT, et al. Fractional order unknown inputs fuzzy observer for Takagi–Sugeno systems with unmeasurable premise variables. Mathematics2019; 7(10): 984.
21.
DadrasSMomeniHR. Fractional sliding mode observer design for a class of uncertain fractional order nonlinear systems. In: Proceedings of the IEEE conference on decision and control and European control conference, CDCECC 2011, Orlando, FL, USA, 12–15 December 2011, pp,6925–6930. New York, NY: IEEE.
22.
PisanoAUsaiERapaicM, et al. Second order sliding mode approaches to disturbance estimation and fault detection in fractional-order systems. In: Proceedings of the 18th IFAC world congress, Milano, Italy, August 28–September 2011, pp.2436–41.
23.
LeeSCLiYChenY, et al. H∞ and sliding mode observers for linear time-invariant fractional-order dynamic systems with initial memory effect. J Dynam Syst Meas Control2014; 136(5): 51022.
24.
HeXXiaoL.Robust fault identification of turbofan engines Sensors based on fractional-order integral sliding mode observer. Int J Turbo Jet Eng2022; 39(1): 1–11.
25.
LiRZhangX.Adaptive sliding mode observer design for a class of T-S fuzzy descriptor fractional order systems. IEEE Trans Fuzzy Syst2019; 28(9): 1950–1961.
26.
ZhangXHuangWWangQG.Robust H∞ adaptive sliding mode fault tolerant control for T-S fuzzy fractional order systems with mismatched disturbances. IEEE Trans Circuit Syst2021; 68(3): 1297–1307.
27.
DongJXWangYYYangGH.Control synthesis of continuous-time T-S fuzzy systems with local nonlinear models. IEEE Trans Syst Man Cybern Part B Cybern2009; 39(5): 1245–1258.
28.
MoodiHFarrokhiM.On observer-based controller design for Sugeno systems with unmeasurable premise variables. ISA Trans2014; 53(2): 305–316.
29.
WangHMYeDYangGH.Actuator fault diagnosis for uncertain T-S fuzzy systems with local nonlinear models. Nonlinear Dyn2014; 76(4): 1977–1988.
30.
KchaouMNarayananGAliMS, et al. Finite-time Mittag-Leffler synchronization of delayed fractional-order discrete-time complex-valued genetic regulatory networks: decomposition and direct approaches. Inf Sci2024; 664: 120337.
31.
VigneshwarBSyed AliMPerumalR, et al. H∞ fault detection and control of Takagi–Sugeno continuous-time conic-type nonlinear systems. Int J Comput Math2024; 101: 545–560.
32.
KchaouMJerbiH.Reliable H∞ and passive fuzzy observer-based sliding mode control for nonlinear descriptor systems subject to actuator failure. Int J Fuzzy Syst2022; 24(1): 105–120.
33.
ManuelADMNorelysACJavierAG. Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional order systems. Commun Nonlinear Sci Num Simulation2015; 22: 650–659.
34.
GongP.Distributed tracking of heterogeneous nonlinear fractional-order multi-agent systems with an unknown leader. J Franklin Inst2017; 354(5): 2226–2244.
35.
WangJShaoCFChenYQ.Fractional order sliding mode control via disturbance observer for a class of fractional order systems with mismatched disturbance. Mechatronics2018; 53: 8–19.
36.
TanakaKWangHO.Fuzzy control systems design and analysis: a linear matrix inequality approach. New York, NY: Wiley, 2001.
37.
ChoiHH.LMI-based nonlinear fuzzy observer-controller design for uncertain MIMO nonlinear systems. IEEE Trans Fuzzy Syst2007; 15(5): 956–971.
38.
MaXJSunZQ.Analysis and design of fuzzy reduceddimensional observer and fuzzy functional observer. Fuzzy Sets Syst2001; 120(1): 35–63.
39.
YanJJYangGH.Adaptive observer-based fault tolerant tracking control for T-S fuzzy systems with mismatched faults. IEEE Trans Fuzzy Syst2020; 28(1): 134–147.
40.
LinDLiaoXDongL, et al. Experimental study of fractional-order RC circuit model using the Caputo and Caputo-Fabrizio derivatives. IEEE Trans Circuit Syst2021; 68(3): 1034–1044.
41.
JiangBWangJLSohYC.An adaptive technique for robust diagnosis of faults with independent effects on system outputs. Int J Control2002; 75(11): 792–802.
42.
HuiSZakST.Observer design for systems with unknown input. Int J Appl Math Comput Sci2005; 15: 431–446.
43.
FilippovAF.Differential equations with discontinuous right-hand sides. Dordrecht: Kluwer Academic, 1988.
44.
DancaM.Continuous approximations of a class of piece-wise continuous systems. Int J Bifurc Chaos2014; 17(55): 80–92.
45.
YoungKUtkinVOzgunerU.A control engineers guide to sliding mode control. IEEE Trans Control Syst Technol1999; 7(3): 328–342.
46.
KalmanRE.A new approach to linear filtering and prediction problems. J Basic Eng1960; 82(1): 35–45.
47.
SmithJLiuYZhouH.Adaptive observer design for fault estimation in fractional-order systems. Int J Control2022; 95(3): 567–581.
48.
WangXLiY.Fault diagnosis for nonlinear systems using a fuzzy observer approach. IEEE Trans Fuzzy Syst2021; 29(5): 1342–1352.
49.
ZhangWChenG.Robust fault estimation for nonlinear fractional-order systems. Automatica2020; 112, 108743.
50.
HanJLiuXXieX, et al. Dynamic output feedback fault tolerant control for switched fuzzy systems with fast time varying and unbounded faults. IEEE Trans Fuzzy Syst2023; 31(9): 3185–3196.
51.
LiHYouFWangF, et al. Robust fast adaptive fault estimation and tolerant control for T-S fuzzy systems with interval time-varying delay. Int J Syst Sci2017; 48(8): 1708–1730.
52.
SunSWangYZhangH, et al. A new method of fault estimation and tolerant control for fuzzy systems against time-varying delay. Nonlinear Anal Hybr Syst2020; 38: 100942.
53.
LvMLiYPanW, et al. Finite-time fuzzy adaptive constrained tracking control for hypersonic flight vehicles with singularity-free switching. IEEE/ASME Trans Mechatron2022; 27(3): 1594–1605.
54.
ZhangJSwainAKNguangSK. Robust sensor fault estimation and fault-tolerant control for uncertain Lipschitz nonlinear systems. In: Proceedings of the American control conference, Portland, OR, USA, 2014, pp.5515–5520.
55.
Sabbghian-BidgoliFFarrokhiM.Polynomial fuzzy observer-based integrated fault estimation and fault-tolerant control with uncertainty and disturbance, IEEE Trans Fuzzy Syst2022; 30(3), 741–754.
56.
ZhangTDengFSunY, et al. Fault estimation and fault-tolerant control for linear discrete time-varying stochastic systems. Sci China Inf Sci2021; 64, 1–16.