
Abstract
The optimization algorithms for identification and control processes take more and more place in the industrial domain. However, determining a control law for fractional systems remains challenging for researchers today. This paper presents a simple method for using a fractional PID (FOPID) corrector to regulate a class of fractional systems that show a stable step response. The procedure is based on an algorithmic identification to assimilate the fractional system into a simple model. Optimization methods were used. Using techniques like Particle Swarm Optimization (PSO), Genetic Algorithm (GA), Artificial Bee Colony (ABC), and Ant Colony Optimization (ACO) to ascertain the parameters of the basic model, a first-order system with delay. Then, the FOPID controller will be calculated using Ziegler–Nichols methods and optimization algorithms to stabilize the real process. Better performance Overshoot and Settling time as well as minimal Energy control effort are benefits of the proposed design. To confirm that the fractional regulator is robust which is optimized by the best-chosen method (PSO), the parameters of the chosen process will be randomly varied. Through two numerical simulations, the efficiency of the suggested method has been confirmed.
Introduction
Fractional models have gained popularity in the past few decades to reflect a wide range of real-world issues.
1
Identification of thermal systems
2
and identification of lithium-ion batteries
3
are accomplished by the application of fractional calculus models and optimization parameters.
4
Other natural processes that fractional differential equations or fractional integrals can represent include heat conduction in a semi-infinite slab,
5
fluid flow in a porous material, and the voltage-current connection in a semi-infinite transmission line. Conversely, it seems that the study of the stability of fractional systems is sensitive and requires a great deal of mathematical computation. Numerous scholars have utilized newly developed theorems.6,7 Since we are talking here about fractional systems, it seems logical to try such a fractional controller as the fractional PID (FOPID).
8
An expanded variant of the traditional integer order PID was proposed by Podlubny,
9
the first iteration of non-integer order PID (FOPID or PIλDμ). Based on the fractional computation, the five parameters that constitute the fractional PID controller are (
In this work, we introduce a novel technique of tuning parameters FOPID to stabilize a fractional system. First, we look for a first-order system with a delay equivalent to our fractional system. This identification phase must be very precise to have a model that is as close as possible to the system to be studied. This article presents a set of identifications with optimization algorithms, 12 such as the genetic algorithm, Artificial Bee Colony (ABC), and others. They give good performance, but particle swarms PSO algorithm 13 is gaining more and more the trust of researchers. It is suitable for all business sectors. When optimizing the parameters using these techniques. The output error between the simplified version and the original system forms the foundation for the effective fitness function. 14 Secondly, through the extension of the Ziegler–Nichols rules developed by Valerio and Costa, 15 we determine the parameters of the FOPID regulator Poor performance is the primary drawback of this tuning method, especially for high-order systems (high overshoot and extended settling time). Therefore, this study about optimizing the FOPID corrector’s parameters for self-tuning in fractional system control piques our curiosity.
The major challenge in control engineering is reducing the effort required to stabilize a system while maintaining performance at an acceptable level. For this, we show in this study that our adjustment and identification method allows an interesting saving of effort.
The mathematical model is typically only a crude approximation of the actual physical system since it operates under preset theoretical parameters. 16 Because of incomplete or erroneous measurements, component deterioration, and/or environmental changes, these parameters are frequently not precisely defined. 17 Examining whether the closed-loop system stays stable in the presence of unclear and changing parameters is an intriguing question. Our objective is to design a model and a controller that are less sensitive to external disturbances. Reliable performance requires a system to be stable under a variety of conditions, but robustness is also demonstrated by the system’s capacity to maintain desired performance in the face of external disturbances.
This work’s remaining sections are arranged as follows: Fractional calculus and the derivation of fractional order dynamic systems are covered in Section “Fractional order dynamic systems and fractional calculus presentation.” Section “System identification by optimization algorithms” describes the identification optimization technique using different methods to simplify the fractional system study and decrease computation complexity. The FOPID controller is present in Section “Fractional PID controller tuning” with the methods used to determine these five parameters. To demonstrate the efficacy of the suggested theoretical notion, two numerical examples of fractional systems will be provided in Section “Results and discussion.” At last, the conclusion is given in Section “Conclusion.”
Fractional order dynamic systems and fractional calculus presentation
Leibniz discussed a potential method for differentiating non-integer orders of m in letters he wrote to J. Wallis and J. Bernoulli in 1695. The definition is as follows:

Fundamental operator of non-integer order in fractional calculus is called
where the operation’s order,
The fractional integro-differential equation can be expressed in the literature in a variety of ways. Rieman–Liouville approximations are among the most used methods for solving fractional integro-differential equations.
Let

where
The derivative of Riemann–Liouville of order

where
With

The order of the procedure can be presumed, without losing generality, to be:

and


As mentioned in equation (9), 20 by utilizing the Laplace transform on equation (8) with zero initial conditions, the fractional order system can be expressed as a transfer function.

Approximations are important for fractional-order transfer functions. Put another way, when corrector simulations are required, full-order transfer functions are utilized rather than fractional-order transfer functions. Equation (10) shows the Oustaloup18,19 simple approximation formulation for fractional order differentiator.

where the function’s gain, denoted by





The approximation method can be used to create fractional order controllers and fractional order systems.
System identification by optimization algorithms
We have used identification from the open-loop response in this paper. This technique attempts to obtain initial estimates of the process by combining data on an approximate process gain, a dominant time constant, and a time delay.
When all other inputs are held constant, the input signal used is a step change of one of the process inputs, the regulated process must be in a steady state before the step changes, and the measured process response needs to be further normalized for unit step changes and initial conditions of zero. 21 The process is identified by the transfer function as follows:


In this approximation method, the model, a first-order system with delay, is obtained by assimilating the step response of these fractional systems to equation (17). However, in order to fine-tune controller parameters, the use of optimization techniques has expanded. The artificial intelligence algorithms 22 have exhibited exceptional levels of performance. Researchers generally use empirical data from computer trials when conducting research in the field of metaheuristics. Furthermore, the classification of diverse metaheuristic methods23–25 is demonstrated in this context by Figure 1.
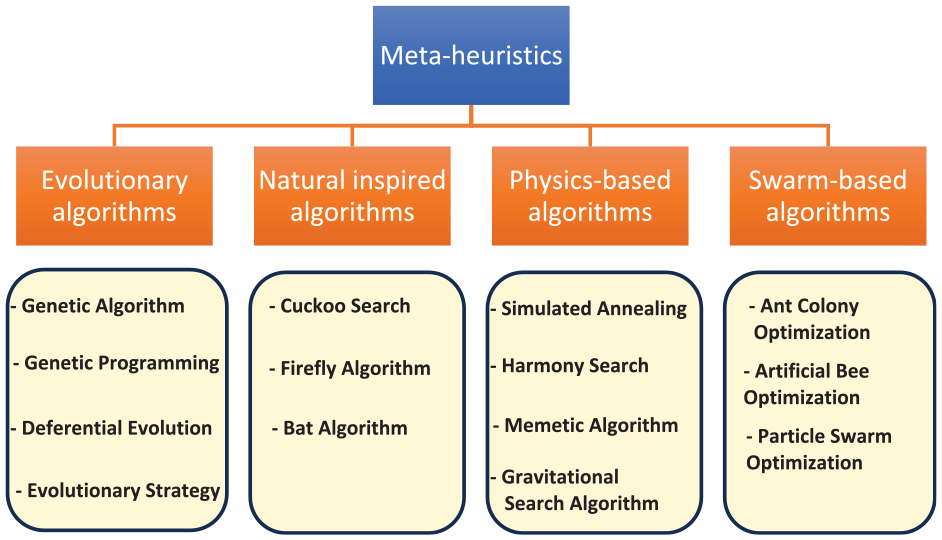
Schematic diagram of meta-heuristics algorithms.
We select four algorithms to utilize in our work: The Artificial Bee Colony (ABC), 26 The Genetic Algorithm (GA), 27 Ant Colony Optimization ACO12–21,26–28 and Particle Swarm Optimization (PSO).
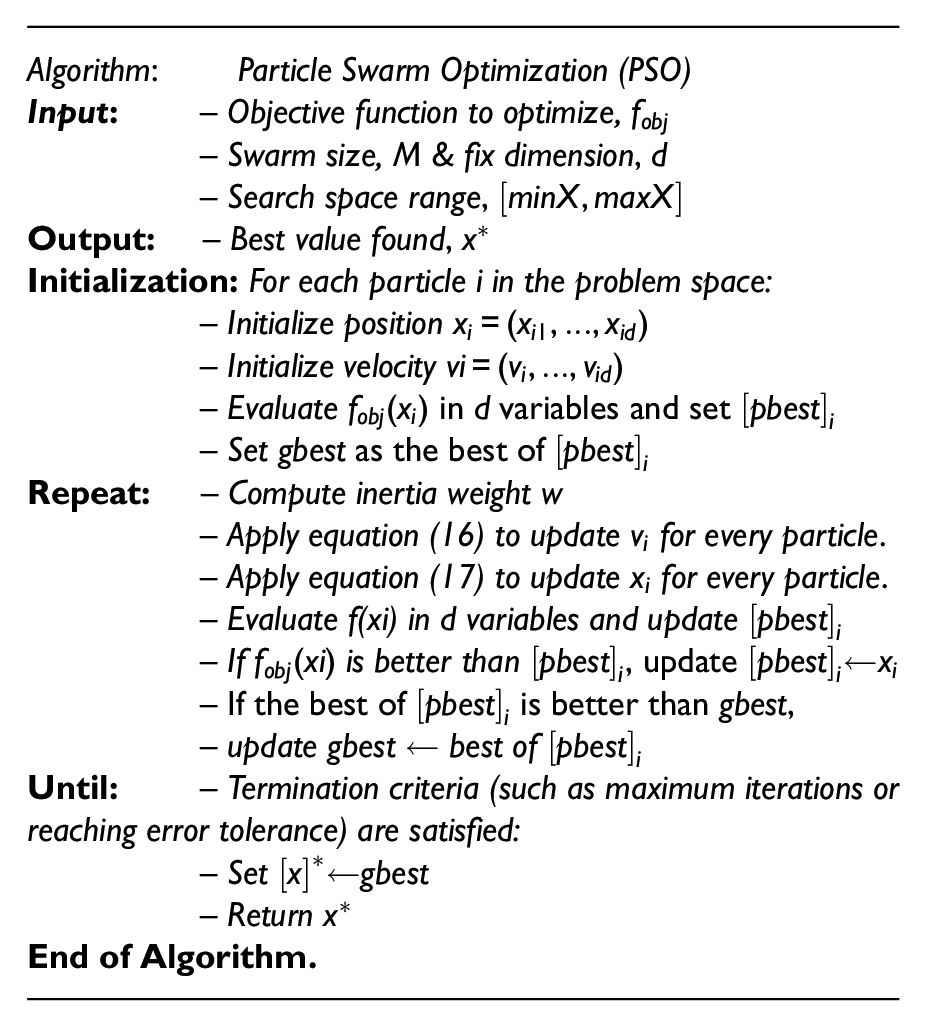
The diagram illustrating PSO algorithm is in Figure 2 and the Pseudo code is in Section “Pseudo code of particle swarm optimization (PSO) algorithm.”
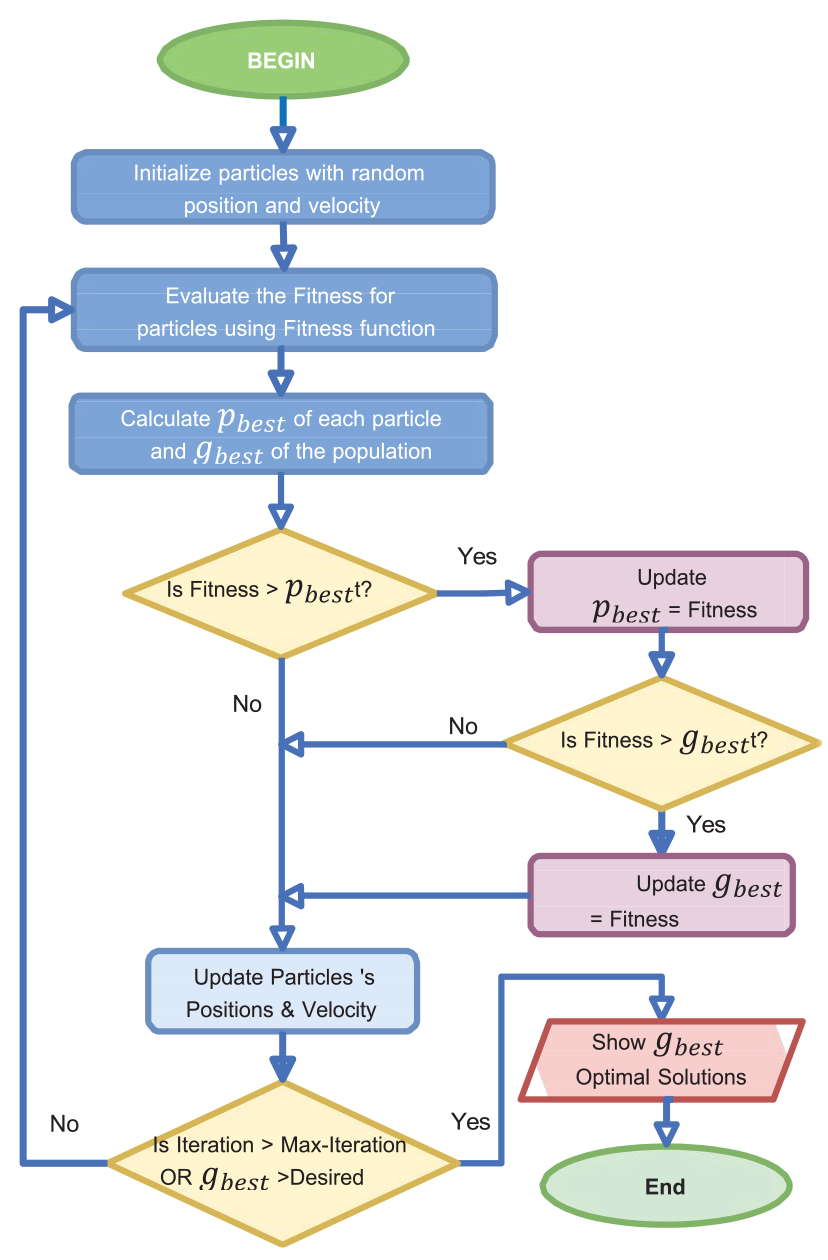
Flowchart of the (PSO) algorithm.
Equations (18) and (19) yield the revised velocity and location, respectively.


for which
Pseudo code of particle swarm optimization (PSO) algorithm
Out of the four models for process control that were found using different techniques, The most efficient one is displayed in Figure 3’s block diagram. In this diagram, the excitation input is denoted by r(t), the actual plant, y(t), is represented by a non-integer transfer function, and the simplified model, y*(t), is a higher-order system devoid of fractional components. By utilizing the

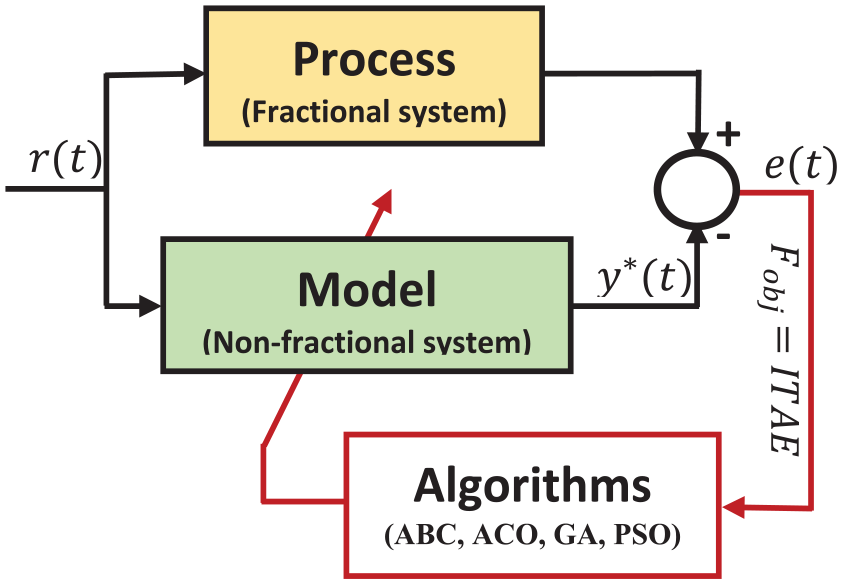
Algorithms-based system identification of process control system.
Four algorithms of optimization will be applied to find the specific model which is a simple first-time system with a delay.
Fractional PID controller tuning
The mathematical formulation for the Fractional Order (FOPID) controller is represented by equation (21), where the values of the derivative and integrator are between 0 and 1. The fractional PID controller’s block diagram, which is organized as follows, is shown in Figure 4:

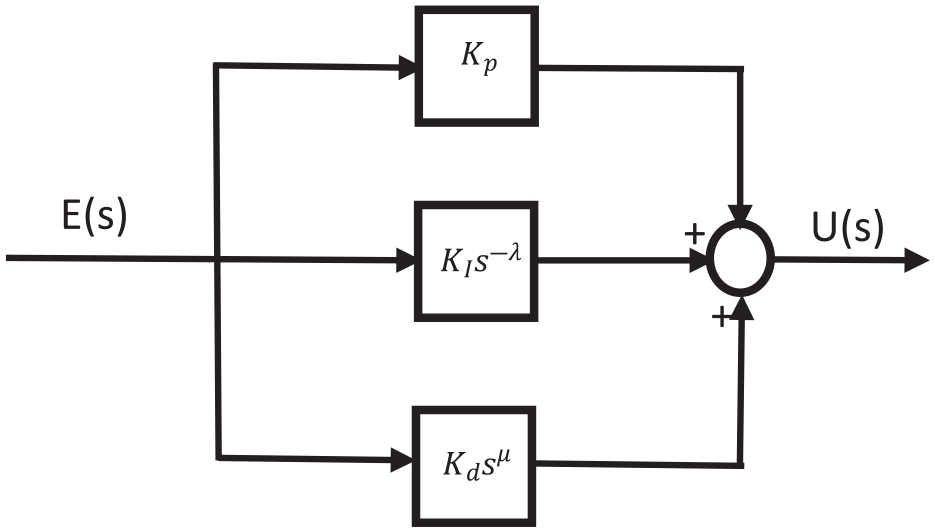
Fractional PID controller block diagram.
The FOPID has two parameters more than the classic PID corrector.
As seen in Figure 5, a fractional PID controller turns into a traditional PID controller if
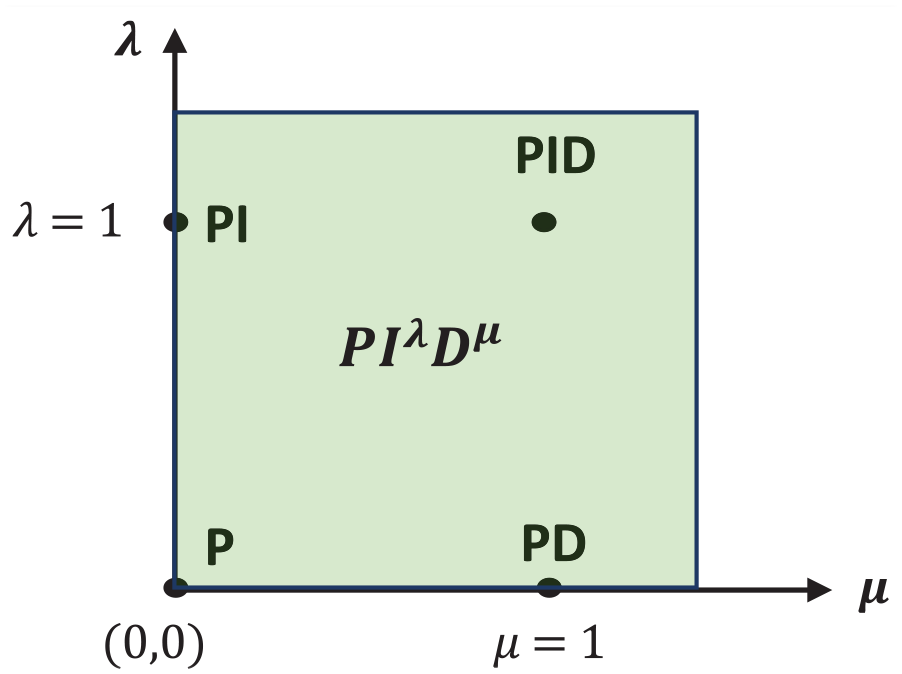
The plane of the fractional PID controller.
A control loop is depicted in Figure 6’s block diagram. The plants are also present in this loop, and the Fractional Order Proportional Integral Derivative (FOPID) controller models are designated as G(s) and C(s). The objective is to adjust the disturbance signal D(s) about the reference input R(s) while keeping an eye on the output signal Y(s). The corrector receives the error signal E(s) to accomplish this and creates the control signal U(s).
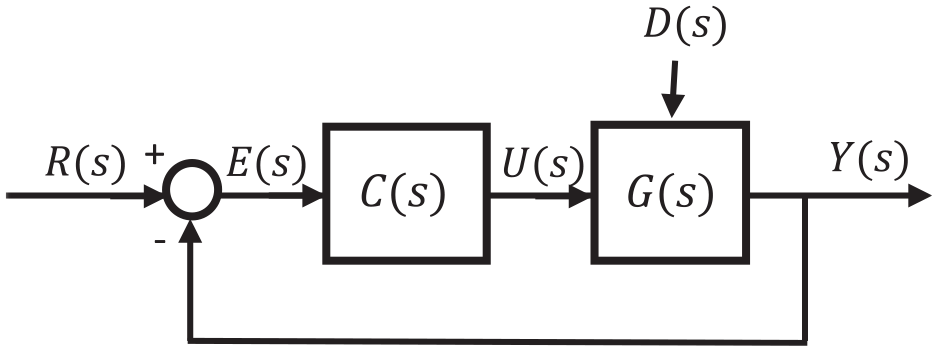
Closed-loop system with FOPID controller.
Stabilization with Zeigler–Nichoks methods
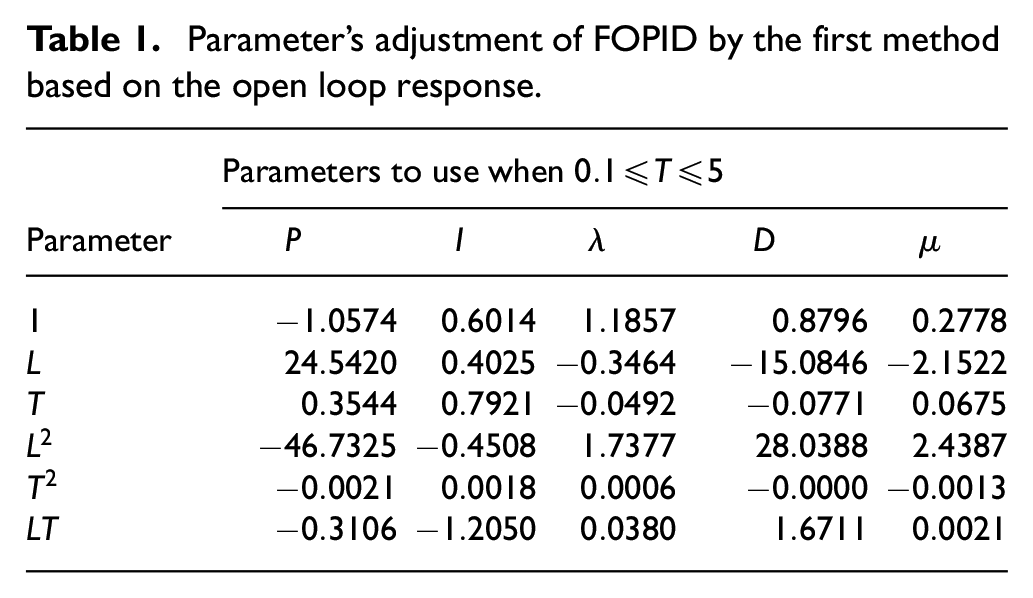
Using the open loop answer as a starting point for adjustment: The Ziegler–Nichols open loop approach served as the model for this adjustment method, which was introduced by Valerio and Costa.
29
The parameters

Parameter’s adjustment of FOPID by the first method based on the open loop response.
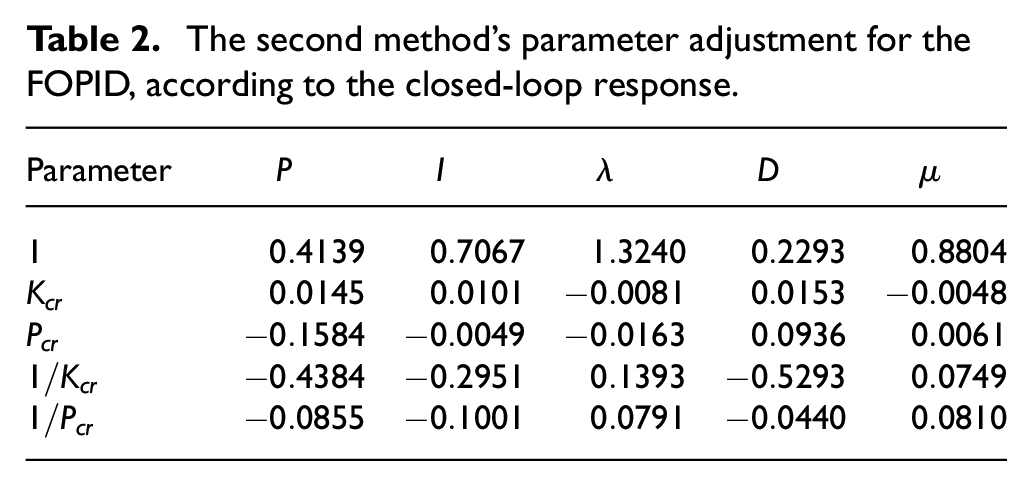
A secondary technique for adapting based on the closed-loop response: The system is inserted in a closed loop with a particular proportional gain which gives a pumping phenomenon. Valerio and Costa obtained the information needed to determine the parameters

The second method’s parameter adjustment for the FOPID, according to the closed-loop response.
Stabilization with optimization algorithms
The identical optimization algorithms (ABC, ACO, GA, and PSO) will be used in the following to ascertain the corrector C(s)’s ideal parameters. Figure 6 shows the closed-loop control system’s design.
MATLAB-SIMULINK is utilized to apply the several techniques that are employed to ascertain the parameters of the corrector FOPID C(s). The structural diagram of the operation is represented in Figure 7.

Schematic diagram of the process of setting FOPID parameters by optimization algorithms.
A fractional system can be an expression of a variation of process parameters during operation. The most frequent robustness of this variation is on the polynomial coefficients of the transfer function, but it can also be a variation of the values of the powers in a fractional way, for example, s 2 can change to s1.8. For this, our study has been devoted to the stability of fractional systems with fractional regulators which are more robust and give more performance.
To create controllers that handle nonlinearities more skillfully, optimization methods can provide improved handling of nonlinearities. The potential of the FOPID corrector to reduce control effort is another crucial factor, particularly if it is tuned by suitable algorithms while maintaining the required performance.
Several performance standards apply to controller design:
Integrated squared error (ISE):

Integral of absolute error (IAE):

Integral of time-weighted squared error (ITSE):

Integral of time-weighted absolute error (ITAE)

Results and discussion
This section’s simulation of two fractional system examples serves as an illustration of the suggested tuning technique.
Equation (28) gives the chosen systems’ transfer function:

Identification
Figure 8 displays the fractional system
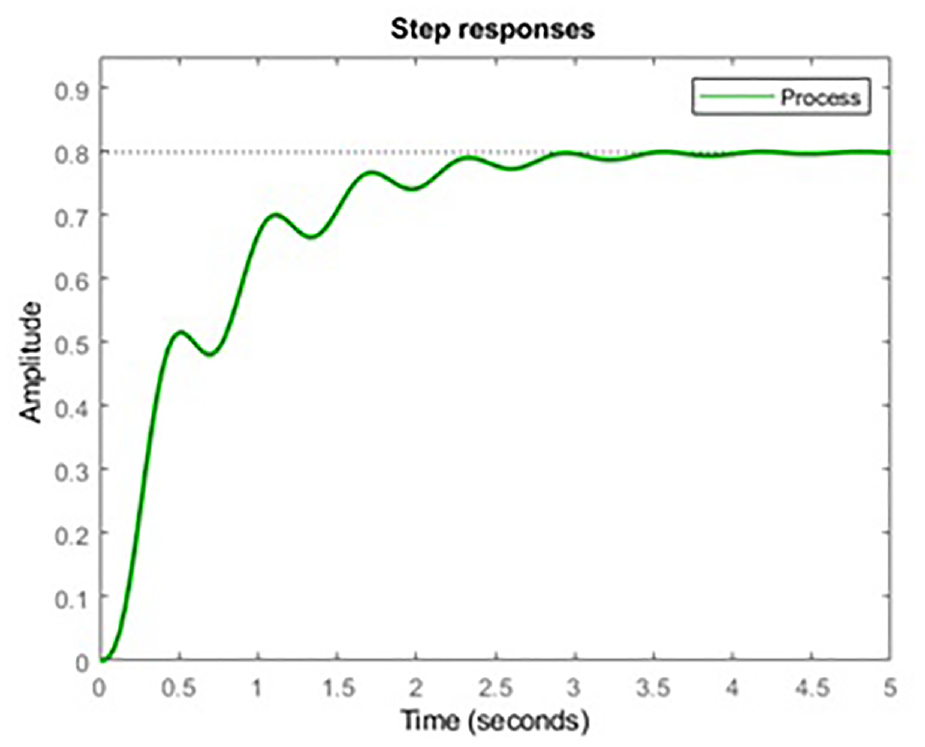
Step response of G1(s) in an open loop.
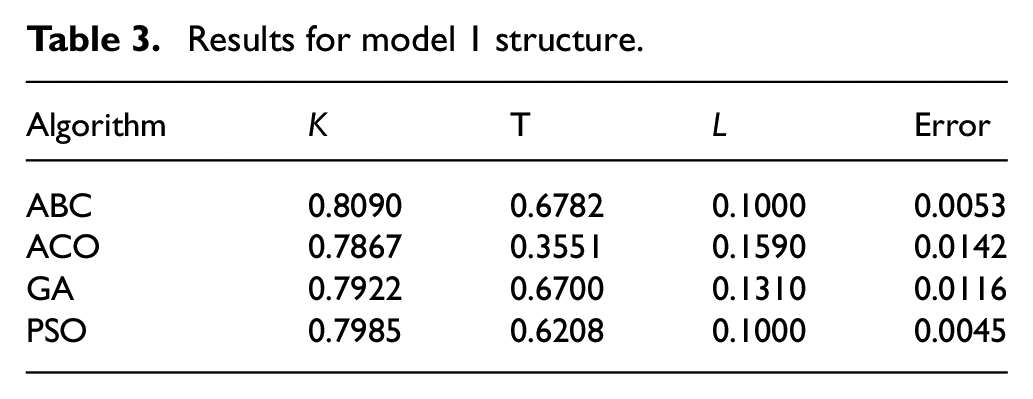
We applied four optimization algorithms (ABC, ACO, GA and PSO) for
Results for model 1 structure.
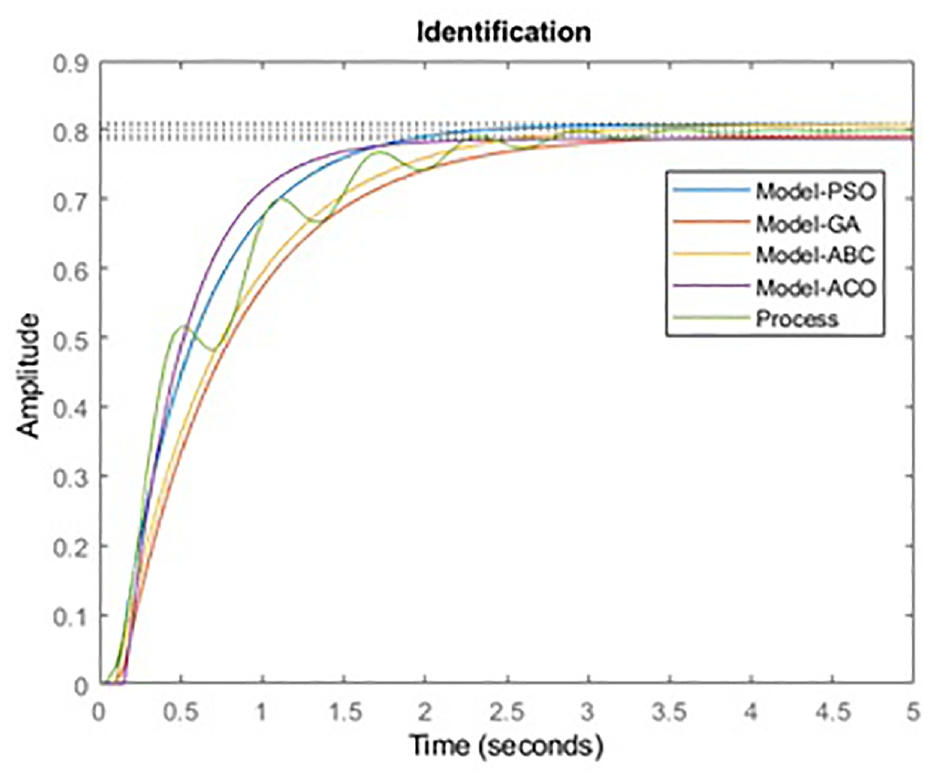
Open loop step replies for comparison.
Next, we suggest a straightforward technique to recognize a group of fractional systems possessing a delayed first-order model. We move from a system that presents non-linearities that can be difficult to treat with ordinary stability theorems towards a classical linear system.
The

The stability of fractional systems can now be studied using new theorems.30,31 Our method is easy to use for stabilizing this particular class of fractional systems. A stability study with a well-designed regulator must follow the identification of the fractional system. We subsequently propose a fractional regulator FOPID. In the same context of fractional calculation, the parameters K, T, and L are useful for calculating the different parameters of the regulator with the extension of the Z–N method.
Stabilization with optimization methods
The optimization of the FOPID parameters with different algorithms (GA, ACO, ANT, or PSO) is proposed with the method illustrated in Figure 10.
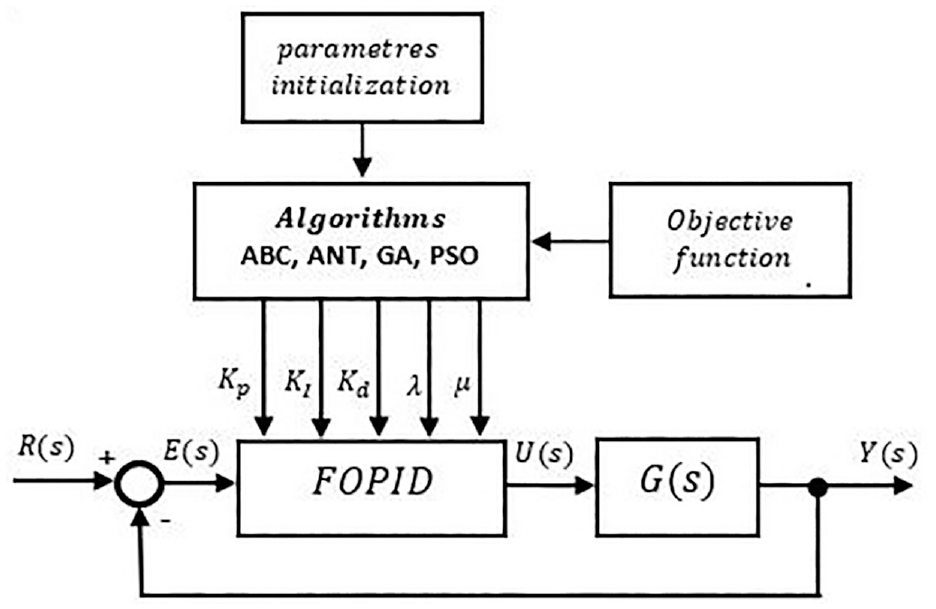
The structure of GA, ANT, ABC, or PSO of the FOPID tuning system.
Six methods of tuning the fractional PID controller have been introduced. The Zeigler–Nickols rules are used to modify the controller’s five parameters, and algorithms are then used to minimize the performance index criterion. The FOPID is obtained using the diffusive representation of the fraction operator, which allows a rational transfer function implemented with Oustaloup’s approximation.
An analysis was conducted to compare the six controllers that were employed to demonstrate the effectiveness of the suggested controllers. The suggested controllers’ FOPID performances (overshoot, rising time, and settling time) were obtained.
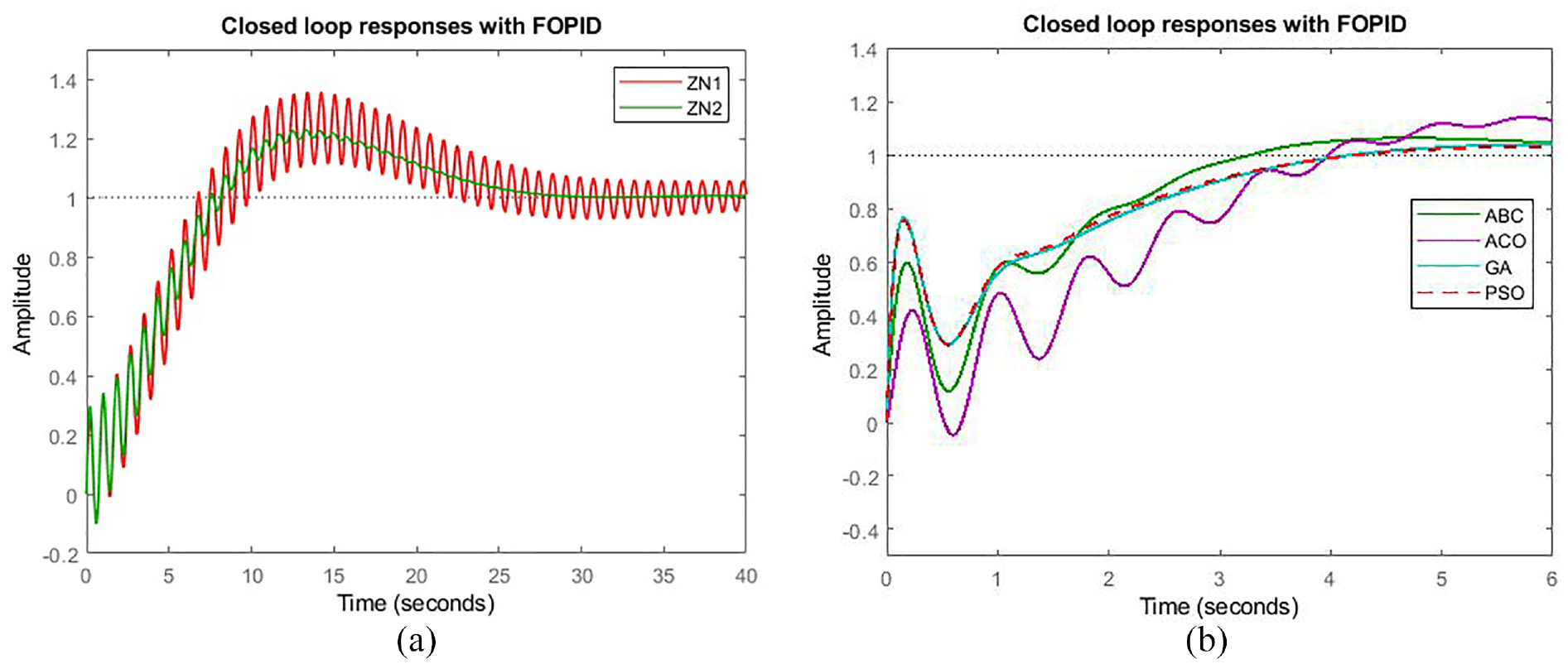
It is clear that everyone is stable in this case when we test the system’s stability using all of the intended FOPIDs. However, while comparing the characteristics such as overshoot and settling time, it becomes apparent that these values of overshoot and settling time decrease in additional ways for optimization techniques. We can see from Figure 11 and Table 4 that the settling times were 16.7266 and 17.3147 s, and the overshoot values calculated using the Ziegler–Nichols methods were 35.6483 and 43.6377, respectively.
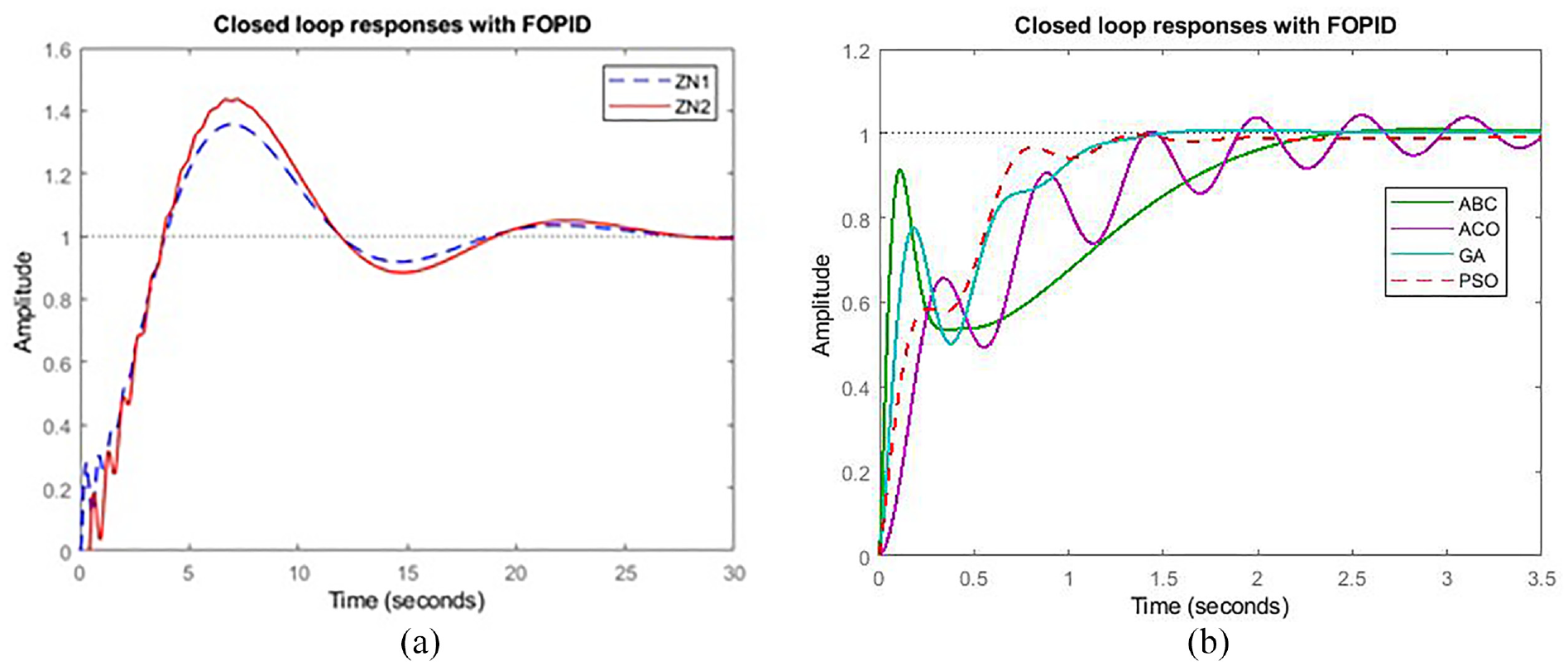
Closed loop responses of
Controller parameters and performance index of
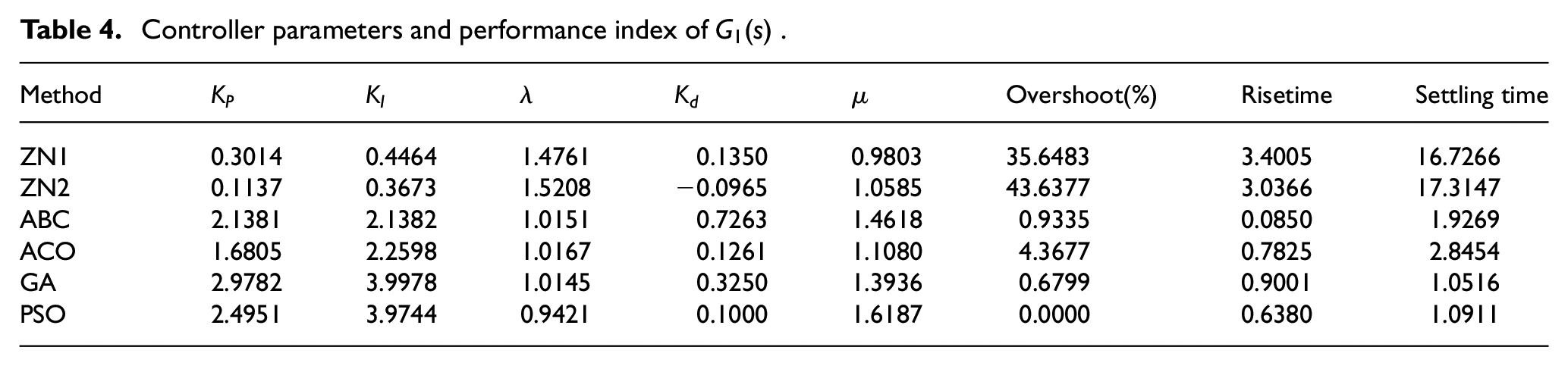
Using optimization algorithms, the overshoot values decrease to 0.9335, 4.3677, 0.6799, and 0.000, the settling time is respectively 1.9269, 2.8454, 1.0516, and 1.0911. So, the fractional system can achieve a steady output level swiftly and without much overshoot. Hence, we can conclude that FOPID controller with optimization algorithms gives stability as well as good step response characteristics, above all with an adequate method.
The adjustment results of the FOPID corrector based on the PSO method show more performance than other algorithms. We can see this by graphic comparison. If we want to specify, we may conclude that the PSO algorithm exhibits a superior control effect because of its quick response, lack of overshoot, low regulation time, and ability to reach the steady-state zone.
Now we need to prove that this PSO optimization method for corrector parameter adjustment also has minimal value control effort and also gives robustness even after model variation. 32
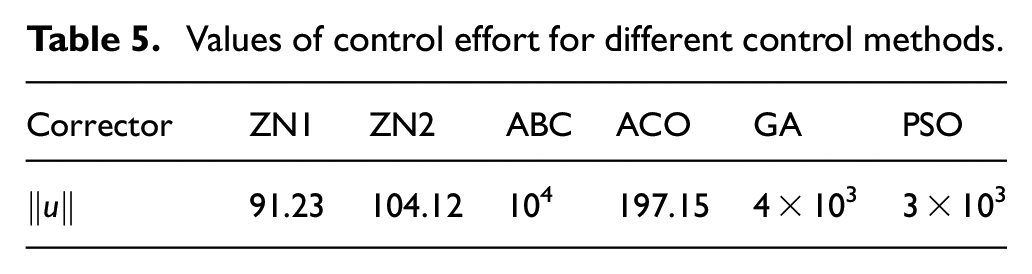
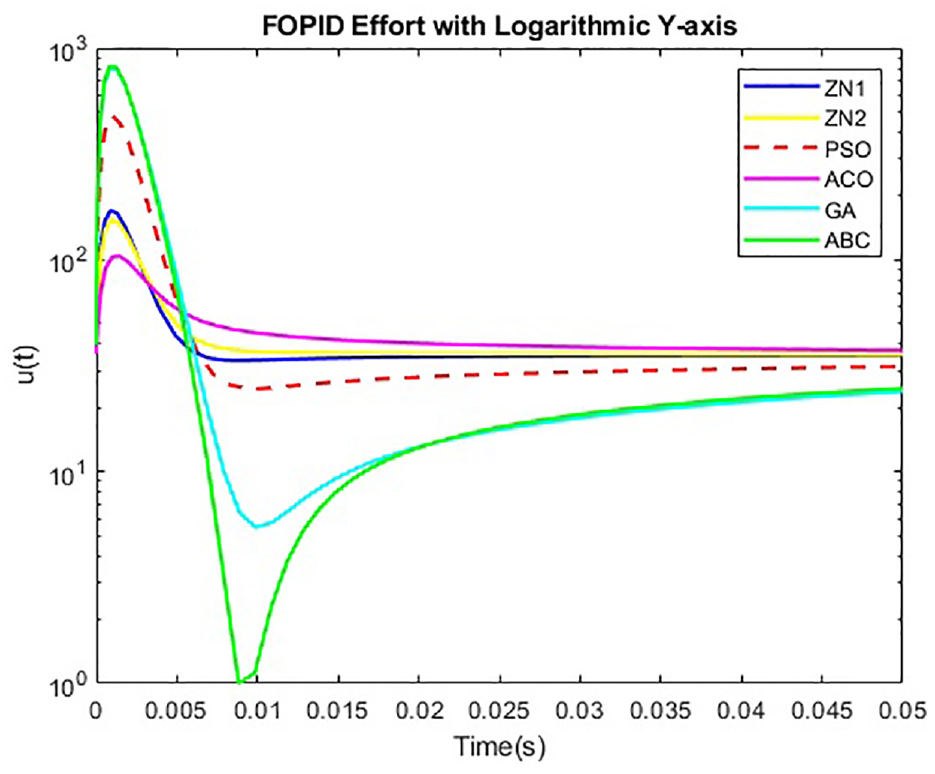
As shown in Table 5 and Figure 12, the control effort required in the two methods of Ziegler–Nichols was 104.12 and 91.23 but with poor performance so it provides little energy to stabilize this split system without any effect on system control. The Y axis is presented in its logarithmic form to simplify reading.
Values of control effort for different control methods.
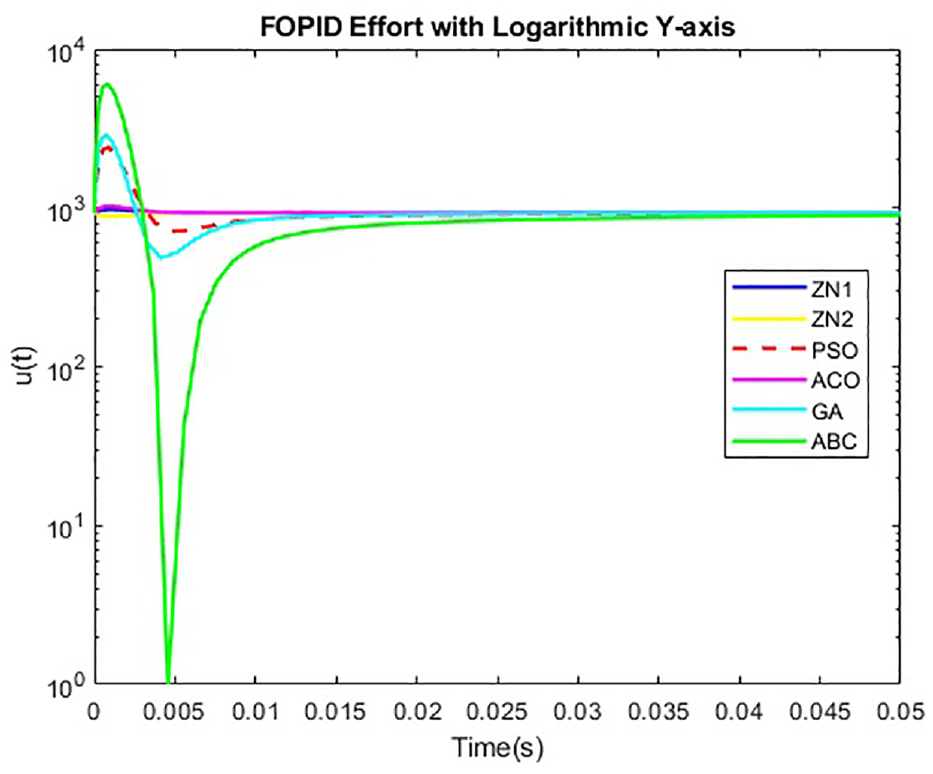
Control inputs for G1 (s) with different corrector.
The effort required to have zero overshoot is 3 × 103 by the PSO method, whereas the ABC algorithm requires an effort equal to 104 for 0.9 overshoot. So, it is much better with the minimum effort we have good performance compared to other optimization methods, and we have a control input value minimized almost by 75%.
Guaranteeing stability, with good performance, while providing as little effort as possible, for split systems is a challenge that we have achieved. Thus, a close examination of the potential implications of our results for future research avenues and real-world applications shows that the well-optimized FOPID corrector is an ideal tool for certain classes of fractional systems. Here are a few actual systems to which we can apply our findings: Viscoelastic materials which are neither strictly elastic nor strictly viscous, and their behavior can be represented using fractional differential equations to represent the response of the material over time. Fractional order models are also utilized in electrochemical systems to explain the dynamics of non-integer order behavior in the system, such as in cycles of battery charge and discharge. Our goal is to broaden the conversation and examine in depth the broader implications of our findings compared to previous research, 33 highlighting their possible influence on the fractional system.
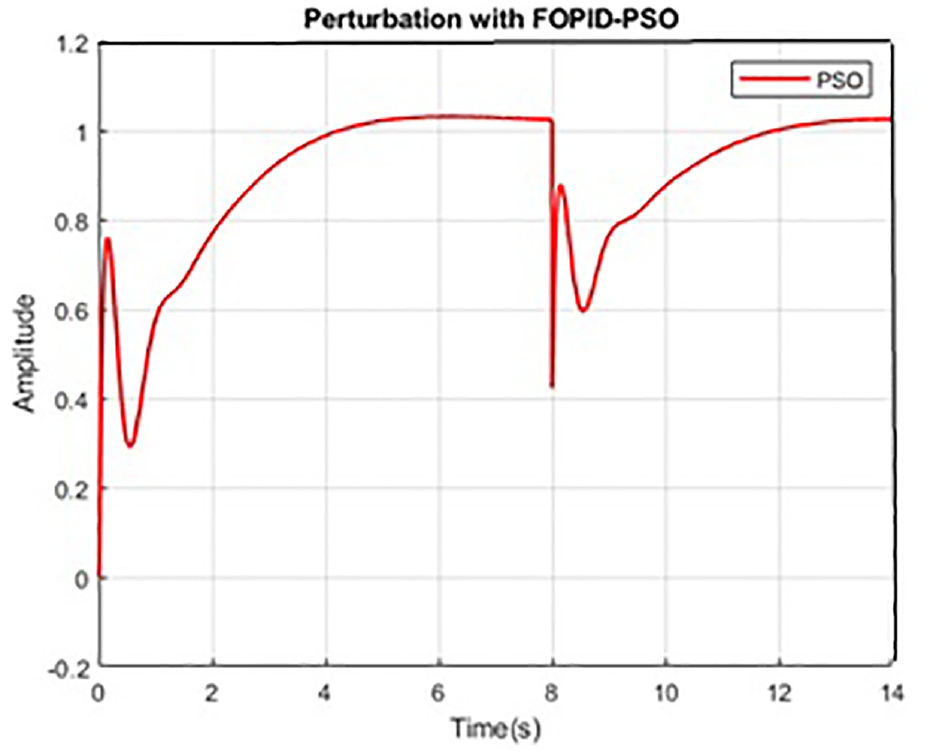
The system’s stability will be lowered by disruptive signals, such as parametric uncertainty and external disruptions. This is the reason that, in the pursuit of robust stability and dependable performance, research is increasingly concentrating on the complete management of the system in the face of external shocks and parametric uncertainties. In a steady state, a constant disturbance injection D(s) is injected, as seen in Figure 6. Figure 13 shows the system response with a FOPID corrector optimized by PSO algorithms with injection disturbance. It confirms that the fractional system
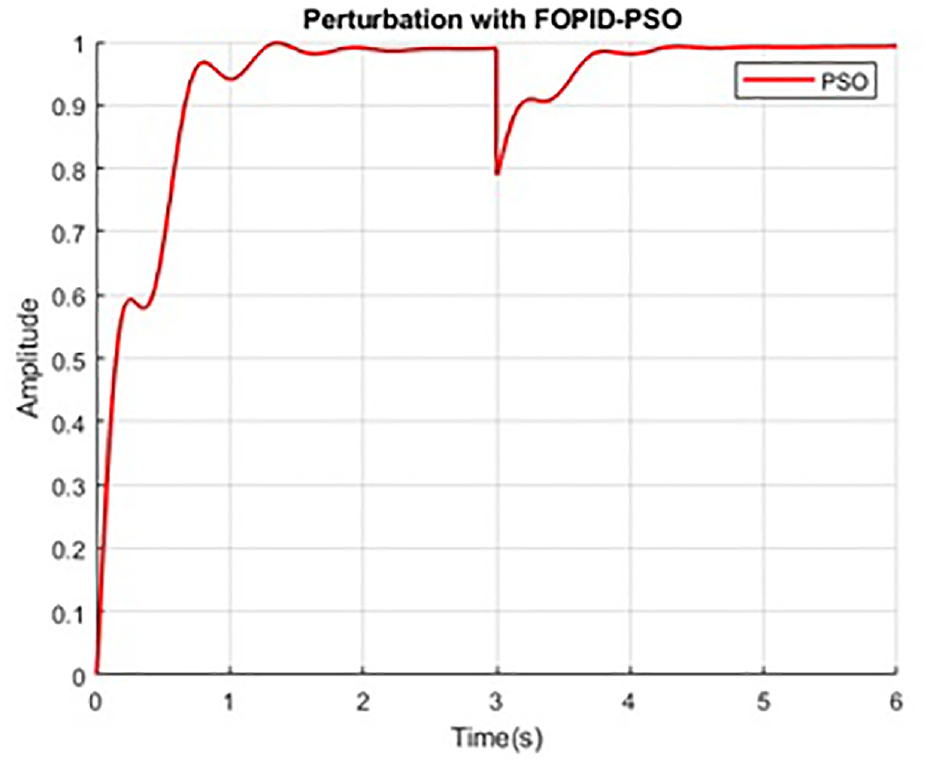
Robust control of G1 (s) with disturbance external injection.
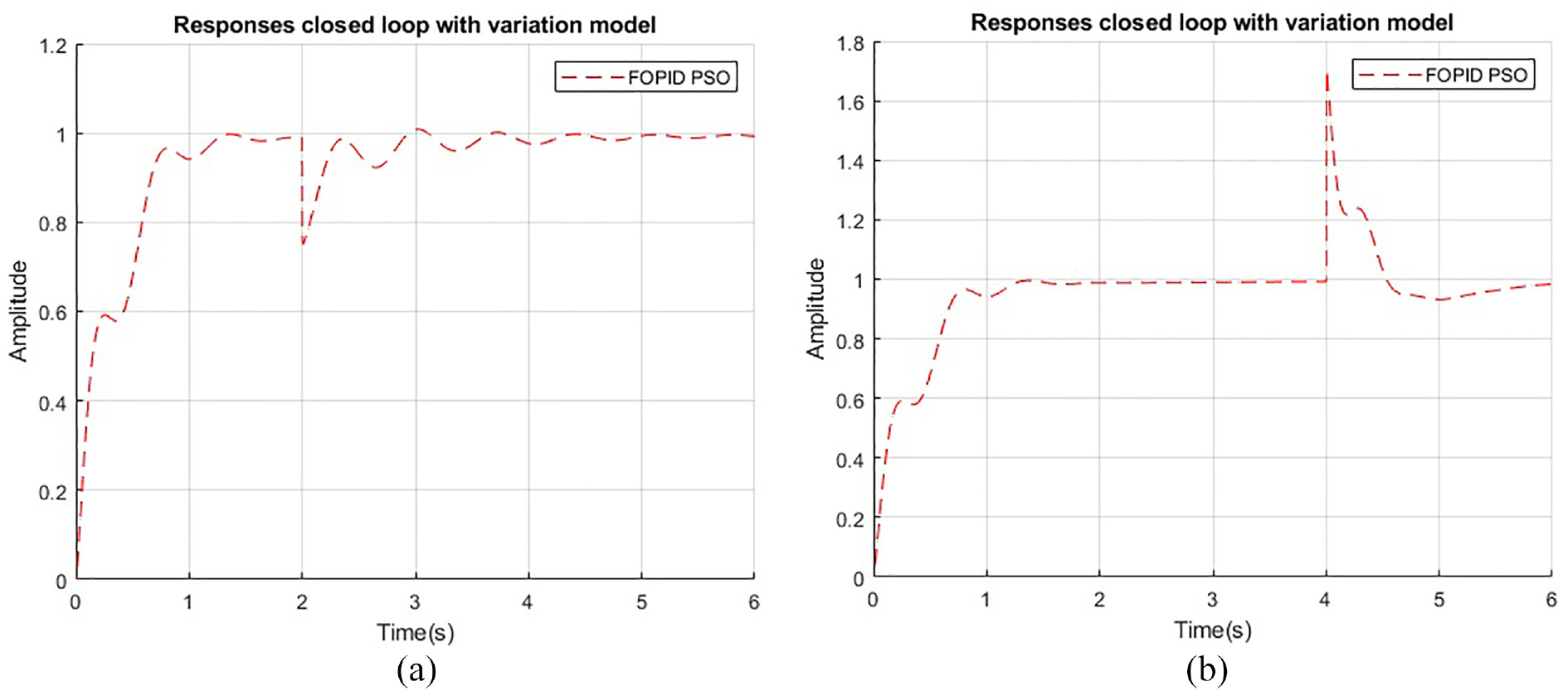
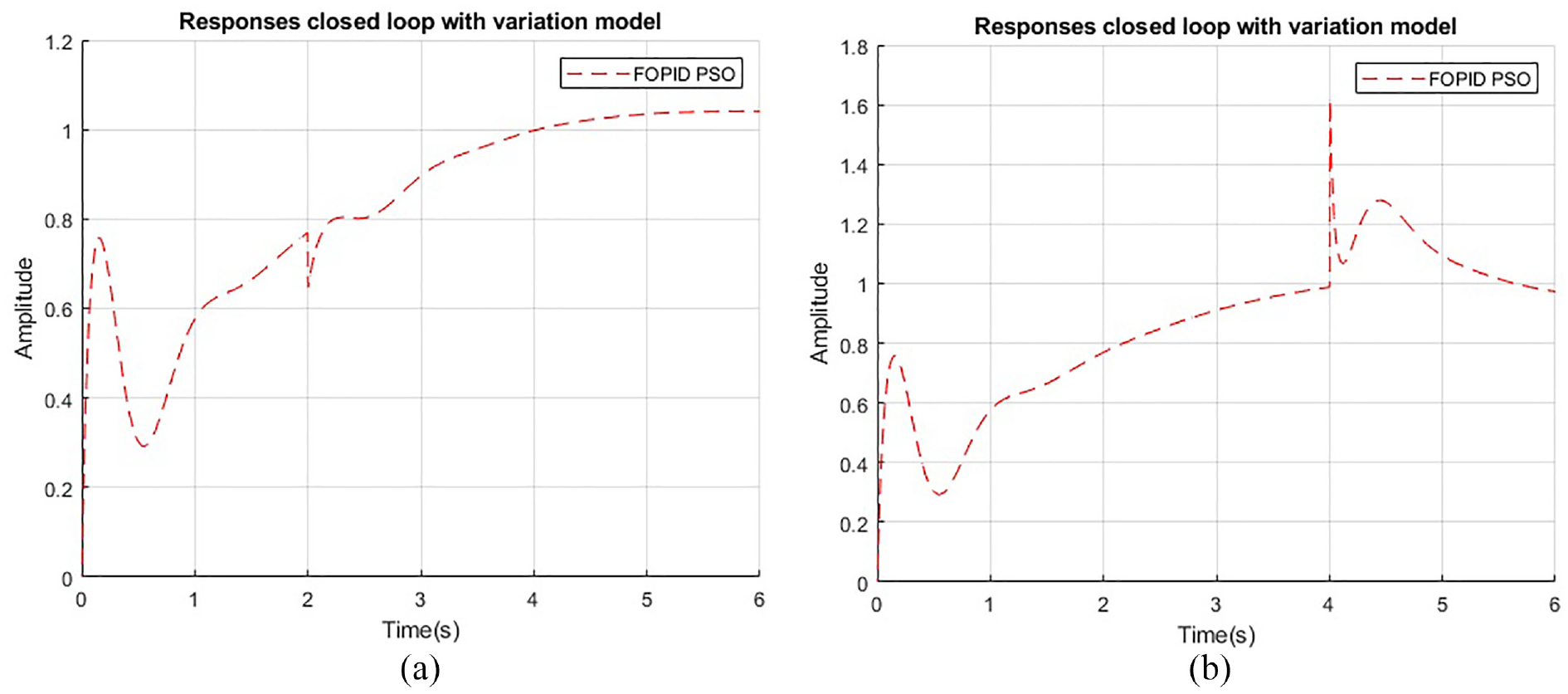
Closed-loop reaction of G1 (s) to perturbation injecting on its variation parameters and coefficients: (a) Perturbation at 2s and (b) Perturbaton at t=4s.
The transfer function of systems chosen is given by:

Identification
The

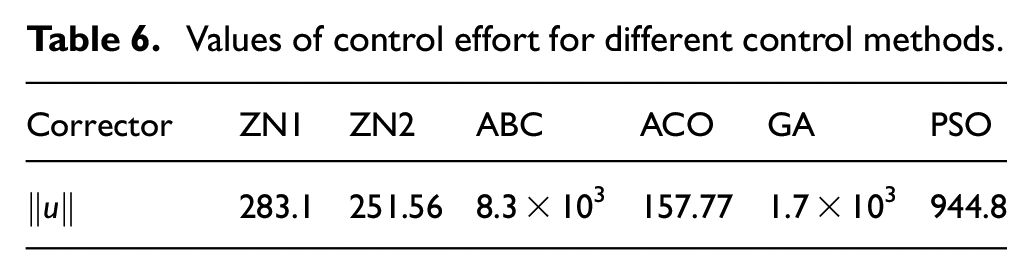
Identifying suitable values for the controller is essential for establishing stability in a closed-loop system. However, performance remains significantly subpar, as indicated in Table 6. The challenge arises when seeking a controller, that not only ensures good performance but also minimizes the effort required for improvement. In this analysis, we showcase the PSO method’s superiority over the fractional-order PID. Stabilizing the second system demands an effort on the order of 8.3 × 103 using the ABC algorithm. In contrast, the PSO algorithm achieves a comparable effort level of 944.8. So, we saved 55% of effort. The graph of the FOPID corrector’s effort utilizing the six previously discussed approaches is displayed in Figure 16 with an exponential distribution representation on the Y-axis display.
Values of control effort for different control methods.
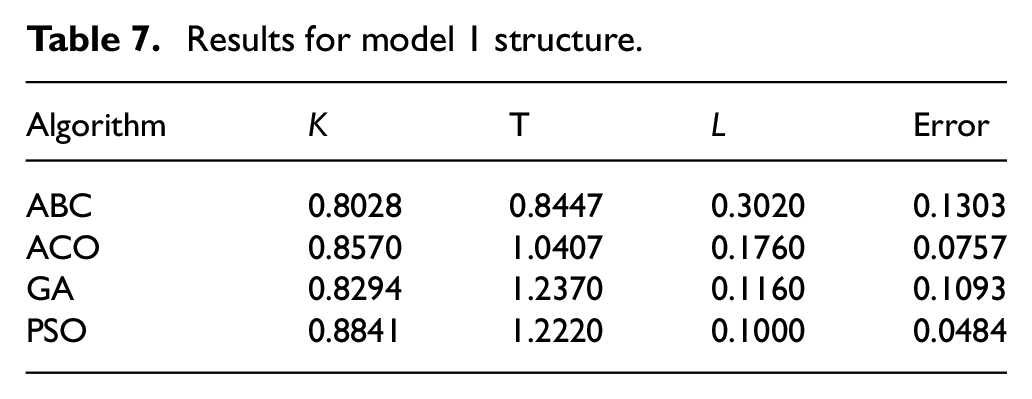
Using the four techniques, we can extract the various parameters of the first-order model with delay from Table 7. Figure 15 illustrates this streamlining of the analysis of specific fractional system classes.
Results for model 1 structure.
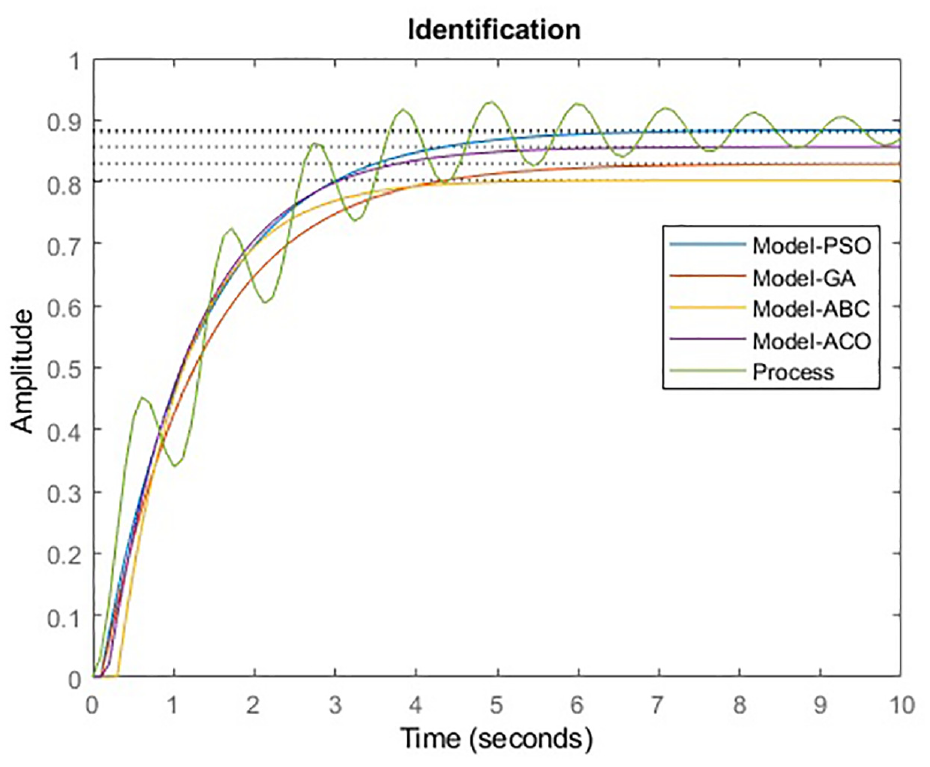
Open loop response of Model 1.
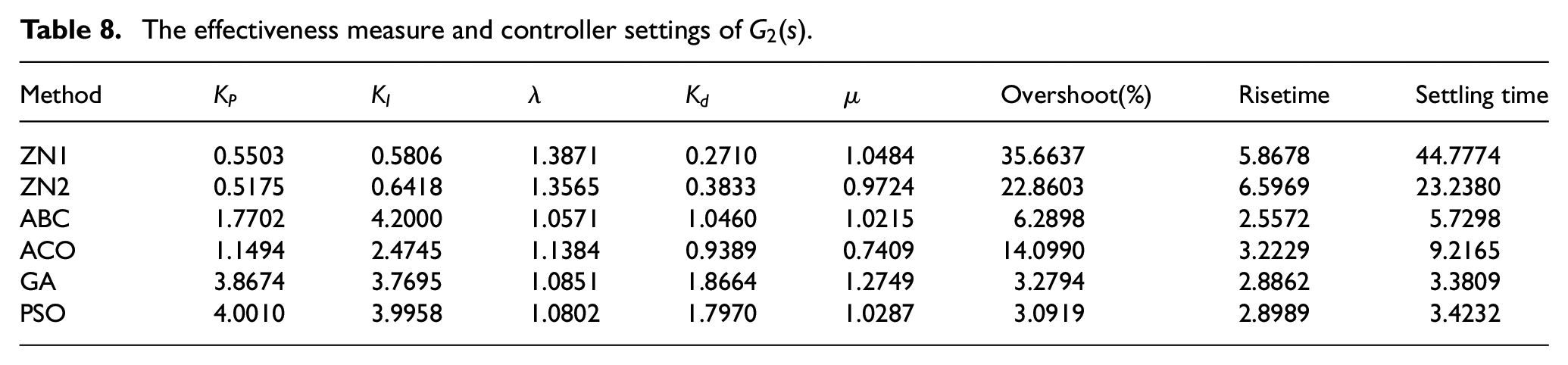
Following the identification phase, an optimization of the fractional regulator FOPID characterizes the control; Table 8 provides these five parameters. When comparing the performance indices of the PSO algorithm versus the Ziegler–Nichols technique extension, they are exceptionally good. The latter shows a stabilization time of 44 s and a substantial difference of about 35%. The PSO method provides us with zero overshoot and a stabilization time of 2.8 s in response to this. We illustrate the closed-loop system’s behavior and the effectiveness of the newly derived control law in Figure 16.
The effectiveness measure and controller settings of
Closed loop responses of G2 (s) with FOPID: (a) Responses with both ZN methods and (b) Responses with optimization methods.
The non-linearity in the fractional system caused by the non-integer fraction in the model has vanished because of the ranges on the derivative and integral of the fractional order of the suggested FOPID controller. The FOPID controller optimized by a suitable algorithm is therefore very effective, especially for systems identified by fractional models, as an implication of these results. This means that even if we increase the range of fractions in the system model (s3.3 and s1.7) compared to Kothari et al., 34 Nassef and Rezk, 35 and Benftima et al. 36 the regulation by the proposed controller remains a better solution due to its simplicity and efficiency (Figure 17).
Control inputs for G2 (s) with different corrector.
A simulation of a closed-loop system with an external disturbance injected at t = 8(s) and a regulator chosen using the PSO algorithm is shown in Figure 18. In spite of outside disruptions, the system remains stable. Thus, our techniques demonstrate the usefulness of using a fractional corrector to stabilize a fractional system. The purpose of this paper is to show that it is possible to examine the effects of rejecting disturbances while the servo system is operating.
Robust control of
The denominator’s initial condition is set to
Robust control of
It is imperative to underscore that our research on fractional systems has introduced a novel FOPID topology that exhibits greater resilience than earlier studies documented in the literature. Our search on the Engine Control System can be used to improve fuel efficiency and performance. In order to capture the non-linear and memory effects inherent in the system, fractional-order systems can be used to represent the hydraulic and mechanical components of the brake system, giving our controllers greater tuning flexibility and durability. Previous works’ main drawbacks are that they only used one optimization approach, didn’t do a robustness analysis or find optimal solutions, overshot, or had slow stabilization durations.
Conclusion
We present a novel method for handling a certain class of fractional system. The identification consists of assimilating the fractional system to a simplified first-order model with delay. We have developed optimization algorithms to identify this model. This model allows us to stabilize the real fractional process with the FOPID tuning methods calculated by Ziegler–Nichols. To improve performance, particularly from the point of view of overshoot and stabilization time, we have also designed a control law using these algorithms, which gives us good results in PSO optimization compared to other methods. The system controller performs effectively while minimizing the energy required for control efforts. Quantitatively, the savings in effort depend on the specific system being addressed; in our cases, it ranges from approximately 75% to 55%. The simulation was applied to two fractional systems with 10% parameter variation to show the robustness of the developed controllers.
Footnotes
Acknowledgements
We would like to express our sincere gratitude to Dr Achraf Jabeur Telmoudi my Supervisor for their invaluable guidance, support, and expertise throughout the course of this research project. Additionally, we extend our appreciation to the entire laboratory team for their collaboration, dedication, and contributions, which were instrumental in the successful completion of this study: Dr Abdelkader Chaari and Dr Adel Taieb.
Author contributions
All authors contributed to the study conception and design, data collection and analysis were performed by Bilel Kanzari, Adel Taieb, Abdelkader Chaari and Achraf Jabeur Telmoudi. The first draft of the manuscript was written by Bilel Kanzari and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Within the scope of this study, all utilized data and relevant materials are available upon request from the authors.