
Abstract
A reference model-based backstepping anti-interference control method is proposed, which performs well in the application of Inverted Pendulum system. Firstly, the backstepping controller of the single-stage straight-line inverted pendulum is designed and the reference model of the system is obtained. Input the actual state variables into the reference model. If the single-stage straight-line inverted pendulum is disturbed, it will deviate from the ideal value of the reference model. In order to improve the anti-interference performance of single-stage straight-line inverted pendulum system, the generalized state error is introduced, that is, the error between the output of the reference model and the actual output of the system. Then the controller is designed by Lyapunov stability theory based on generalized state error and backstepping control method. Finally, the reference model-based backstepping anti-interference controller is obtained. MATLAB/Simulation results show that the controller can effectively suppress the influence of external interference on the single-stage straight-line inverted pendulum. It has strong robustness and anti-interference ability.
Keywords
Introduction
Inverted pendulum system is an unstable, nonlinear, and underactuated mechanical system. The inverted pendulum system can effectively reflect the nonlinear and robust issues of the control system during the control process. Therefore, inverted pendulum is often used in the control field to test the effectiveness of new control strategies 1 and algorithms.2,3 Inverted pendulums provide sufficient models for plenty of technical applications in robotic systems. 4 They are used as representative models for many practical control issues, such as human arm movements, rocket launches,5,6 robots, etc.
In recent years, various algorithms have been applied successively to solve the stabilization control issues of single-stage straight-line inverted pendulum system. Such as, linear active disturbance rejection control, 4 adaptive neural network, 7 optimal control,8,9 predictive control, 10 etc. In previous studies, most algorithms have relied on precise dynamic modeling and linearization processes. As a result, the control algorithm is insufficient in robustness and anti-interference ability, which is difficult to apply to the actual engineering environment.
In order to solve the above issues, this paper proposes a reference model-based backstepping anti-interference control method for single-stage straight-line inverted pendulum. Firstly, the backstepping controller 11 of the single-stage straight-line inverted pendulum is designed and the reference model of the system is obtained. Input the actual state variables into the reference model. When the inverted pendulum system is disturbed, the variation in the output of the reference model is opposite to the actual output. This difference is a key link in the generation of control variables. The difference between the reference model output and the actual output of the system is defined as the generalized state error. Then the controller is designed by Lyapunov stability theory based on generalized state error and backstepping control method. Finally, the reference model-based backstepping anti-interference controller for the single-stage straight-line inverted pendulum is obtained. Compared with other anti-interference control methods, this control method has simpler structure and fewer variables. MATLAB/simulink simulation results show that the reference model-based backstepping anti-interference controller for single-stage straight-line inverted pendulum is effective to continuous sinusoidal signal interference, instantaneous pulse signal interference, and step signal interference. And it has strong robustness and anti-interference ability.
Mathematical model of single-stage straight-line inverted pendulum system
The mathematical model of single-stage straight-line inverted pendulum system is established by using Newton-Euler method. After ignoring air resistance, the single-stage straight-line inverted pendulum system was abstracted into a system consisting of a pendulum rod and trolley (see Figure 1). Where,
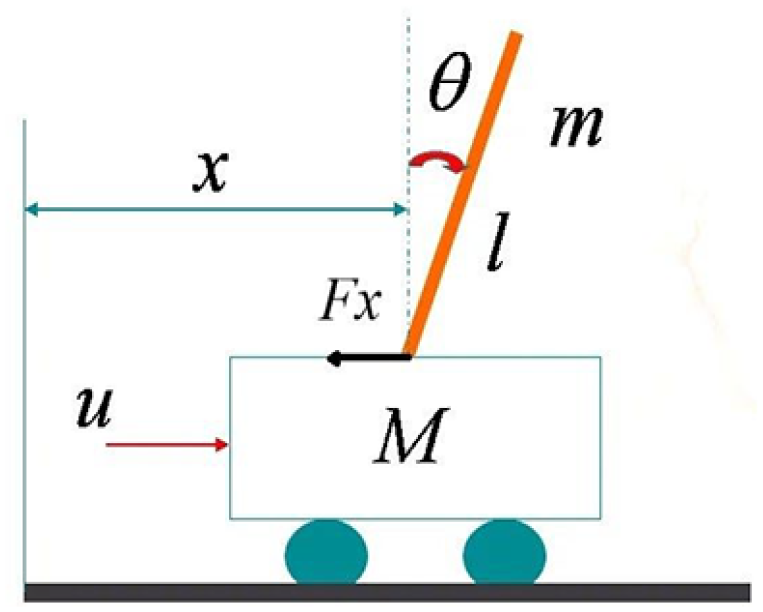
Single-stage straight-line inverted pendulum system.
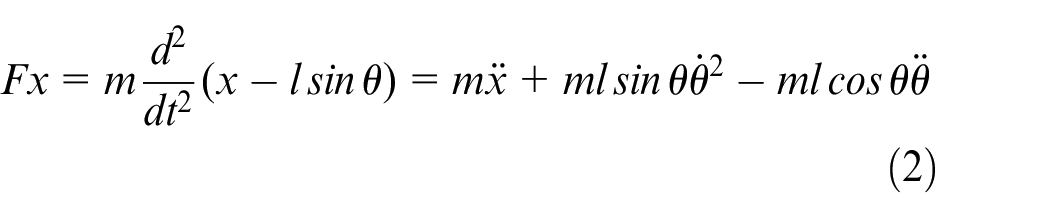
According to Newton’s second law, the horizontal direction of trolley

Let the horizontal force on the pendulum be
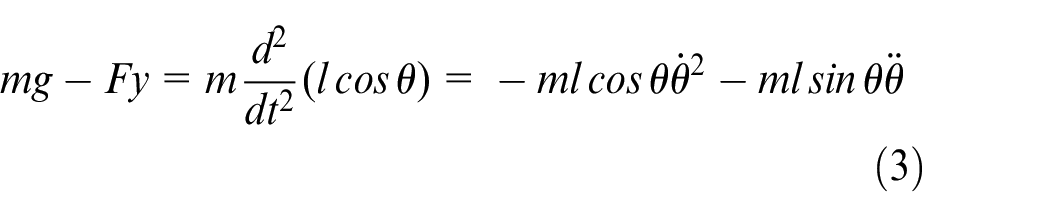
In the vertical direction of the pendulum rod
Pendulum rod torque balance

Put (2) into (1), and you put (2) and (3) into (4)

Equations (5) and (6) are the mathematical models of the single-stage straight-line inverted pendulum. The single-stage straight-line inverted pendulum system is an unstable, nonlinear, underactuated mechanical system. The following will be based on this mathematical model to design a controller to make the single-stage straight-line inverted pendulum system asymptotically stable.
Reference model-based backstepping anti-interference controller design for single-stage straight-line inverted pendulum
Basic backstepping controller design for single-stage straight-line inverted pendulum
The first step is to define the error variable of the system

Take the

where

And take its derivative

Only when

where


The second step is to take the virtual error variable
Constructing a Lyapunov Function

Take its derivative

In order to ensure the stable convergence of the designed

Obtain

Reference model of single-stage straight-line inverted pendulum System
The reference model of the single-stage straight-line inverted pendulum system is derived from the backstepping controller and the mathematical model of the single-stage straight-line inverted pendulum. In other words, the designed controller

Pay attention, Input the actual state variables of the system into the reference model, instead of the state variables of the reference model. When the inverted pendulum system is disturbed, the variation in the output of the reference model is opposite to the actual output. This error is a key link in the generation of control variables.
Reference model-based backstepping anti-interference controller design for the single-stage straight-line inverted pendulum
The block diagram of reference model-based backstepping anti-interference control system is shown in Figure 2
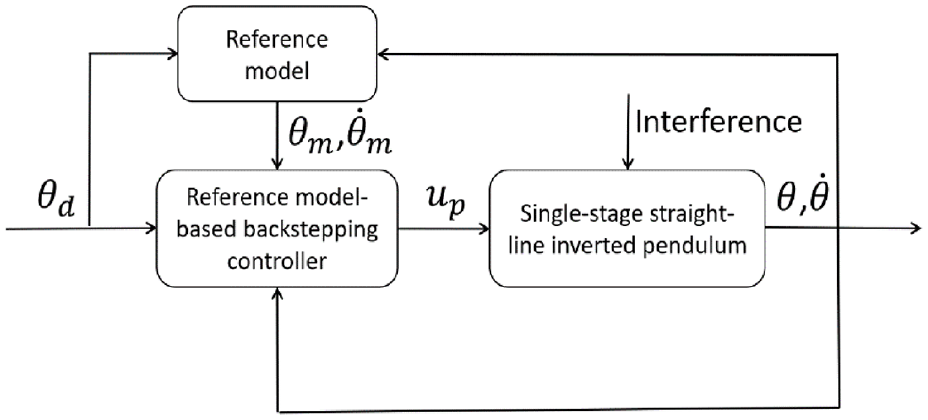
Block diagram of reference model-based backstepping anti-interference control system.
The first step is to define the generalized state error of the single-stage straight-line inverted pendulum system

Take the

where

And take its derivative

Only when

Then


The second step is to take the virtual error variable
Substituted into the reference model of the system
Constructing a Lyapunov Function

And take its derivative

In order to ensure the stable convergence of the designed

The reference model-based backstepping Anti-interference controller
The final position of the trolley movement can be obtained by Simultaneous equations (5) and (32).
Stability analysis
Simultaneous equations (6), (19), (32) operation, obtain:
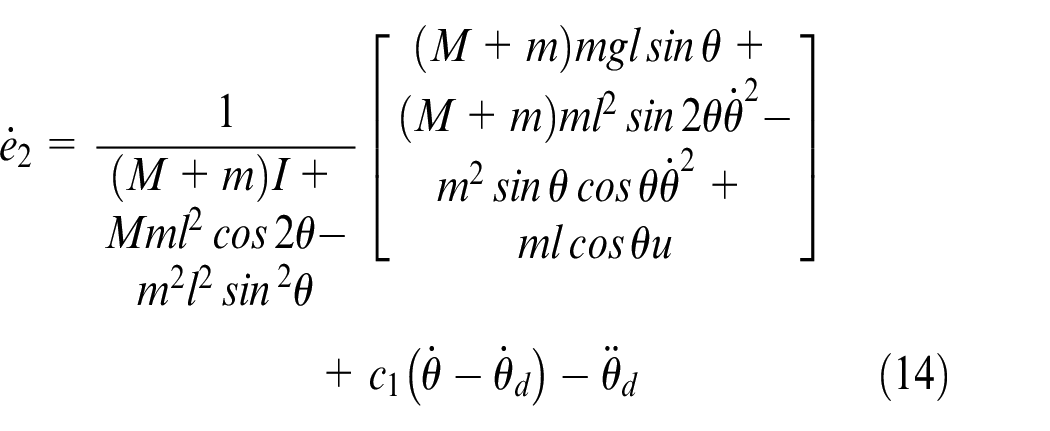
Simultaneous equations (14), (26), (31), (32), (33) operation, obtain:
Simultaneous equations (8), (11), (21), (24), (31) operation, obtain:



The state space form written as a state error equation is
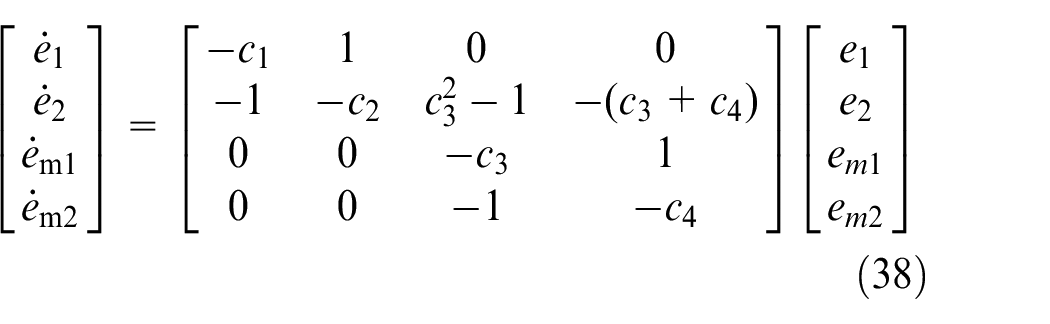
Select the values of the controller parameters to make the system matrix
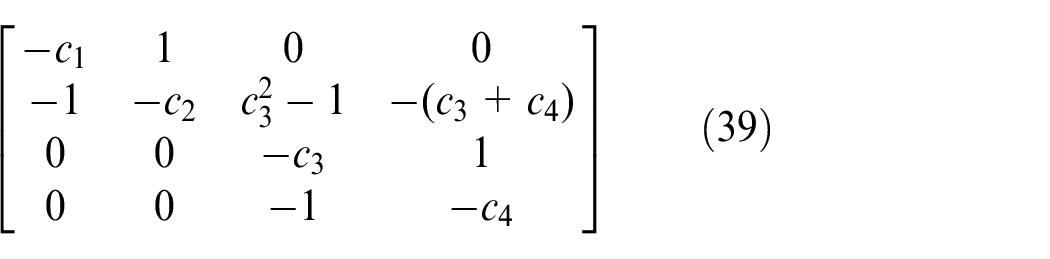
For any
Simulation and verification
When the single-stage straight-line inverted pendulum system is disturbed, the mathematical model of angle
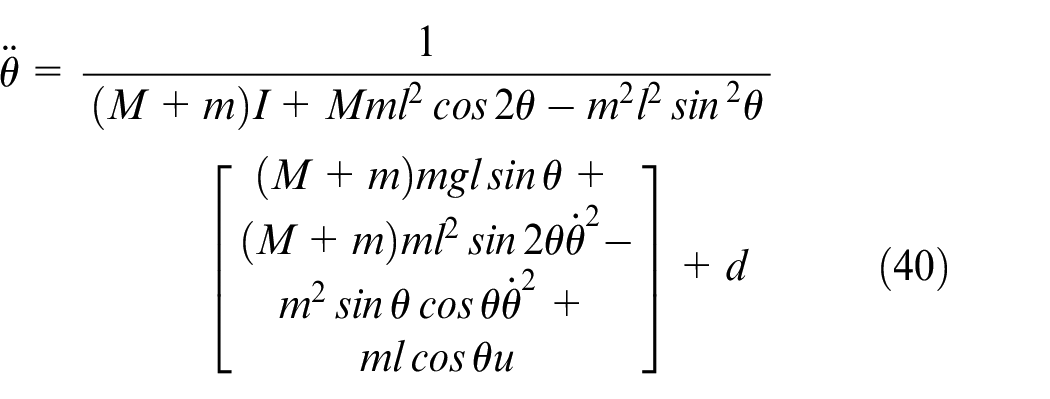
where
Specific parameters of the single-stage straight-line inverted pendulum.
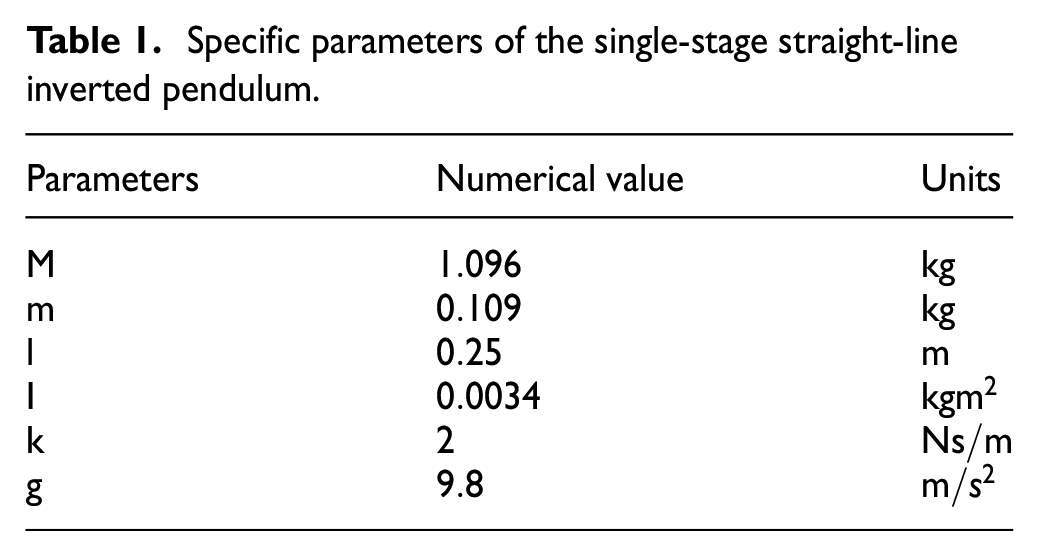
Set the initial position of the trolley as
Control effect of the single-stage straight-line inverted pendulum under continuous sinusoidal signal interference
Continuous sine interference signal is
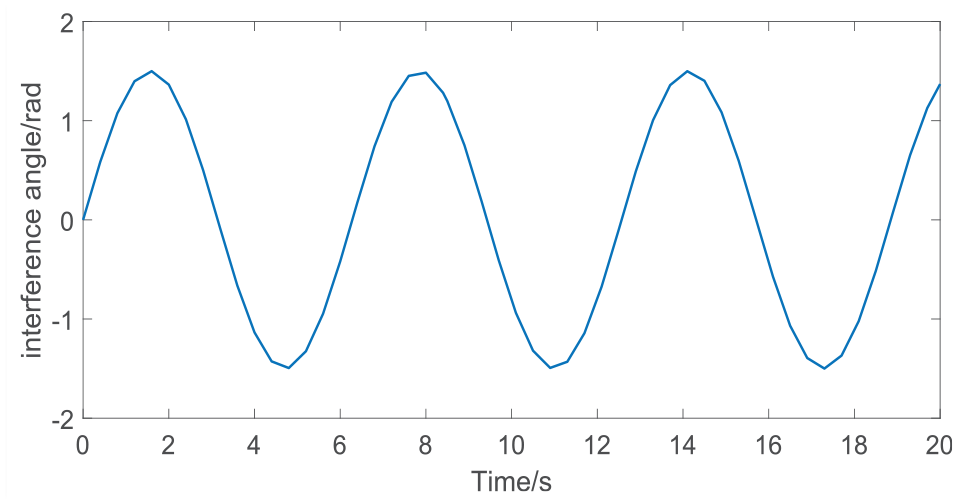
Continuous sine interference signal.
It can be seen from Figure 4 that the pendulum rod is disturbed by the same interference. When the backstepping controller is used for control, the single-stage straight-line inverted pendulum is greatly affected by the interference. The angle of the pendulum rod cannot be asymptotically stabilized at the balance position, and oscillation occurs. When the disturbance observer-based backstepping controller is used for control, the controller has a good suppression effect on continuous sinusoidal signal interference. However, the system still cannot reach a stable state. When the reference model-based backstepping controller is used for control, the controller has a good suppression effect on continuous sinusoidal signal interference. The system does not overshoot. The pendulum rod reaches to the balance position about
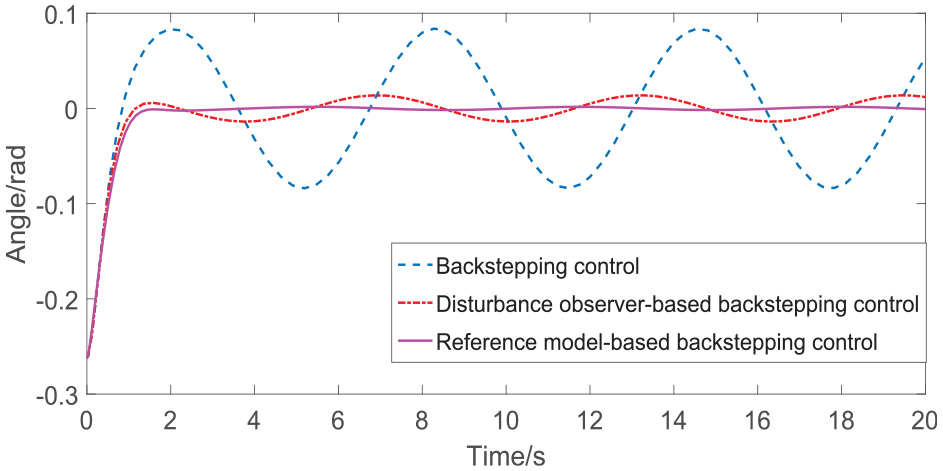
The angle response of the single-stage straight-line inverted pendulum under the interference of continuous sine signal.
It can be seen from Figure 5 that the trolley is moving back and forth to ensure the balance of the pendulum rod. This is due to the underdrive of the single-stage straight-line inverted pendulum system. The oscillation amplitude of the disturbance observer-based backstepping controller and the reference model-based backstepping controller is obviously smaller than that of the backstepping controller. Although the trolley performance gap of the reference model-based backstepping controller and the disturbance observer-based backstepping controller is not significant, it is crucial for the stability of the pendulum rod. To sum up, the reference model-based backstepping anti-interference control method is effective for the suppression of continuous sinusoidal signal interference.
The position response of the single-stage straight-line inverted pendulum under the interference of continuous sine signal.
Control effect of single-stage straight-line inverted pendulum under the interference of instantaneous pulse signal
The pulse interference signal of the single-stage straight-line inverted pendulum is triggered at the 8 s. It is the unit pulse, as shown in Figure 6.
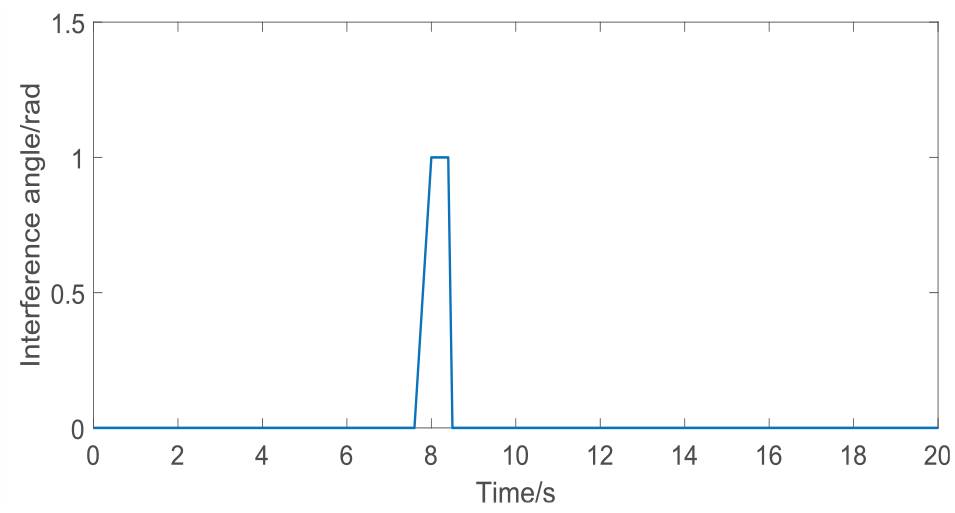
Instantaneous pulse interference signal.
It can be seen from Figure 7 that the pendulum rod is disturbed by the same interference. When controlled by the backstepping controller, the single-stage straight-line inverted pendulum is greatly affected by interference. The angle of the pendulum rod deviates from the balance position by a large range. Then, it returns to a stable state. When the disturbance observer-based backstepping controller is used for control, the controller has a good suppression effect on the instantaneous pulse signal interference. Even better, when the reference model-based backstepping controller is used to control, the angle of the pendulum rod changes slightly. And it is basically in a stable state of balance position.
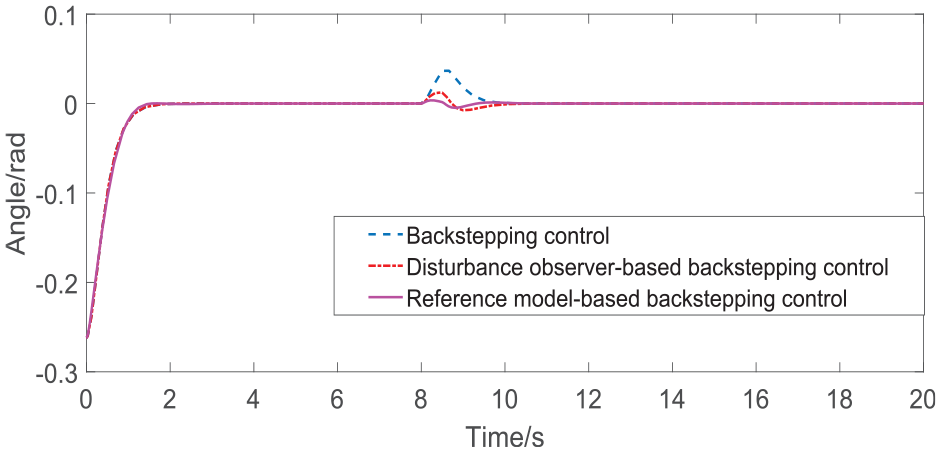
The angle response of a single-stage straight-line inverted pendulum under the interference of pulse signal.
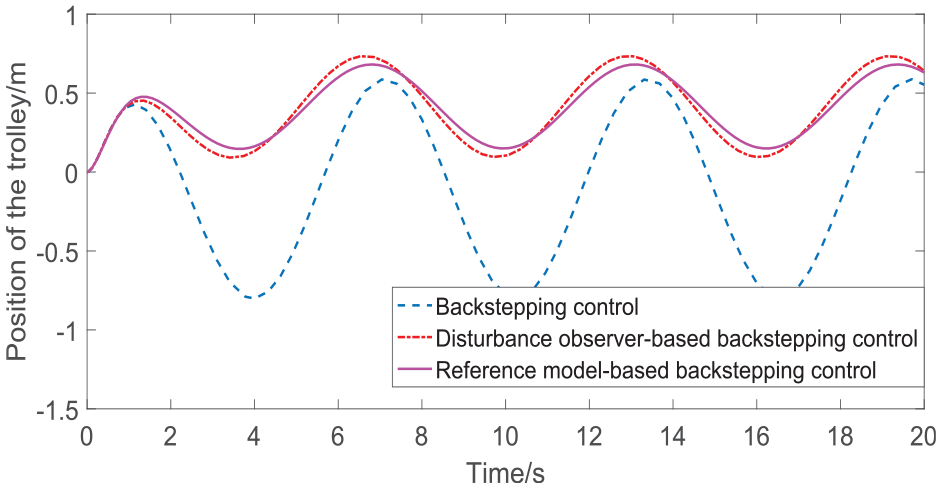
It can be seen from Figure 8 that the single-stage straight-line inverted pendulum system is disturbed by the same instantaneous pulse interference signal. When the backstepping controller is used to control, the pendulum rod can be balanced only when the trolley moves in a large range. When the disturbance observer-based backstepping controller and the reference model-based backstepping controller is used to control, the amplitude of the trolley motion is about 0.2 m smaller than that of the backstepping controller. Moreover, the response of the reference model-based backstepping controller is faster. In conclusion, the reference model-based backstepping anti-interference control method for the single-stage straight-line inverted pendulum is effective to suppress the instantaneous pulse signal interference.
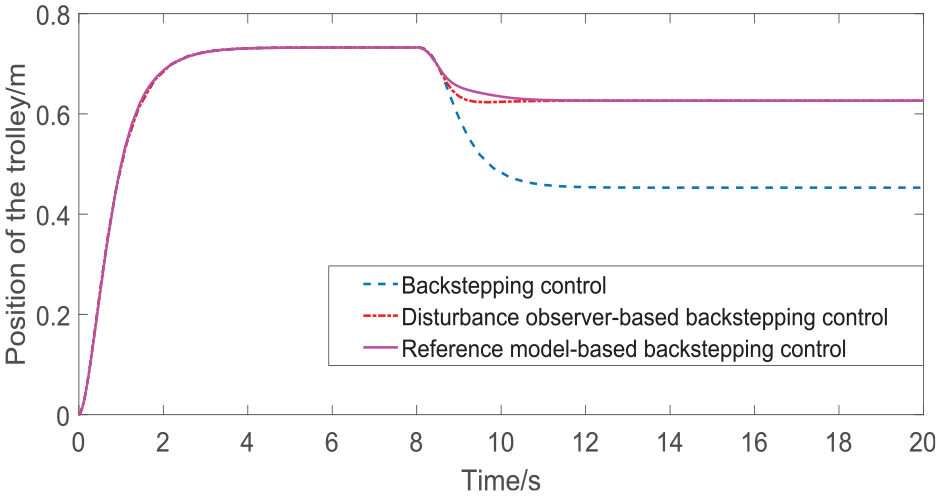
The position response of single-stage straight-line inverted pendulum under the interference of pulse signal.
Control effect of single-stage straight-line inverted pendulum under the interference of step signal
The step interference signal of the single-stage straight-line inverted pendulum is triggered at the 8 s. See Figure 9.
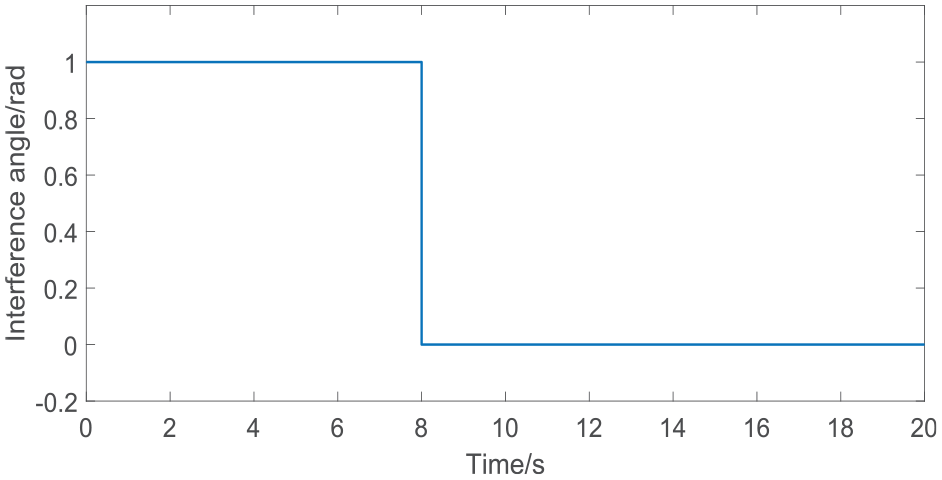
Step interference signal.
It can be seen from Figure 10 that the pendulum rod is disturbed by the same interference. When the backstepping controller is used for control, the single-stage straight-line inverted pendulum is greatly affected by interference. The interference with an amplitude of 1 causes the angle of the pendulum rod deviates from the balance position, resulting in a sustained error of 0.05 rad. After the step interference reaches 0, it returns to a stable state. When the disturbance observer-based backstepping controller is used for control, the controller has a good suppression effect on instantaneous step signal interference. The system does not overshoot. When the reference model-based backstepping controller is used to control, pendulum rod is basically in a stable state of balance position. There is only a little influence in the angle of the pendulum rod during the step.
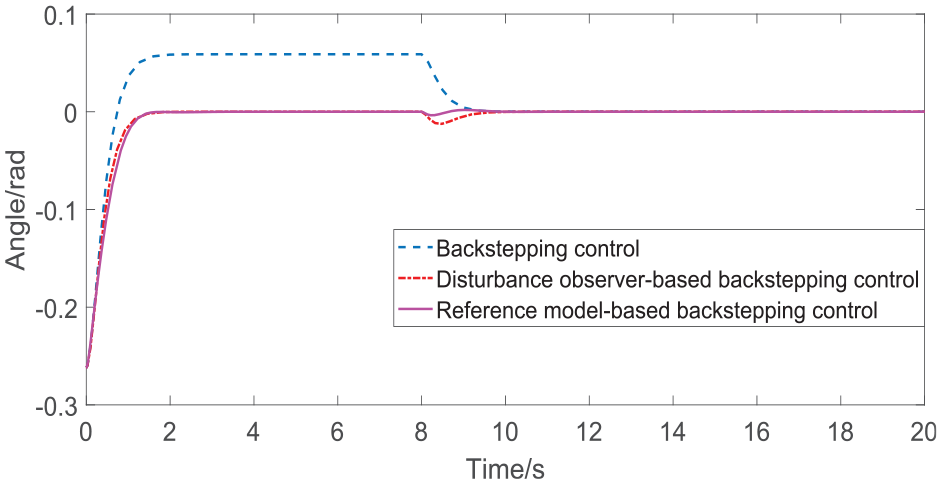
The angle response of a single-stage straight-line inverted pendulum under the interference of step signal.
It can be seen from Figure 11 that the single-stage straight-line inverted pendulum system is disturbed by the same step interference signal. When the basic backstepping controller is used to control, the pendulum rod can be balanced only when the trolley moves in a large range. When the disturbance observer-based backstepping controller and the reference model-based backstepping controller is used to control, the amplitude of the trolley motion is about 3 m smaller than that of the basic backstepping controller. The effect comparison is obvious. As a result, the reference model-based backstepping anti-interference control method for the single-stage straight-line inverted pendulum is effective to suppress the step signal interference.
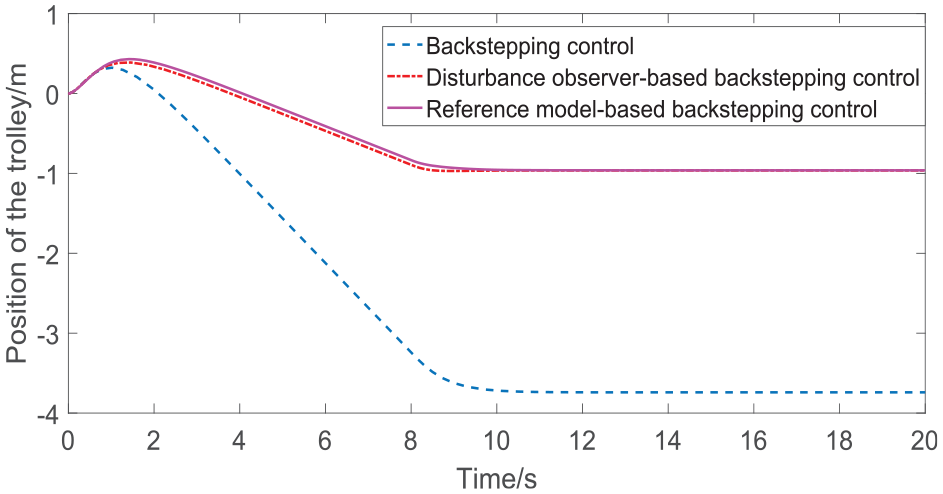
The position response of single-stage straight-line inverted pendulum under the interference of step signal.
Conclusion
As a classical control model in the control field, the single-stage straight-line inverted pendulum system provides a judgment basis for verifying the effectiveness of the new immature control algorithm. Considering the influence of external interference on the inverted pendulum system in actual environment, this paper takes the input and output response of the system that it is not disturbed as the reference model, and designs a reference model-based backstepping anti-interference controller for single-stage straight-line inverted pendulum, which realizes the suppression of interference, taking into account the deviation between the reference model and the actual output. Compared with other anti-interference control methods, this control method has simpler structure and fewer variables. MATLAB/simulink simulation results show that the reference model-based backstepping anti-interference controller for single-stage straight-line inverted pendulum is effective to continuous sinusoidal signal interference, instantaneous pulse signal interference, and step signal interference. And it has strong robustness and anti-interference ability.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) declared the following potential conflicts of interest with respect to the research, authorship, and/or publication of this article: This work was supported by the Shandong Natural Science Fund Medium Gold Project (ZR2016FP10) and the National Natural Science Foundation of China Youth Science Fund Project (61703221).
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.