
Abstract
In this study, a novel control design of nonlinear systems has been presented to solve the problem of matched and unmatched perturbations (disturbances) with unknown upper bounds. The proposed controller combined a backstepping control approach with a barrier function integral sliding mode controller (BS-BFISMC). The control design utilized the powerful backstepping control algorithm to decompose the nonlinear system into subsystems to provide global stability, while the barrier function ISMC has been adopted to cope with perturbation, avoid the pre-knowledge of upper bound in the perturbation, and mitigate the chattering effect in the control signal. A stability analysis based on Lyapunov has been conducted for the proposed BS-BFISMC to prove the ultimate boundedness of tracking errors. Another control scheme, which is concerned with the problem of unmatched perturbation, has been also presented: a robust continuous backstepping-based controller (CRBS). A comparison study has been made between the proposed BS-BFISMC and three control structures (conventional backstepping, SMC, and CRBS). Numerical simulation based on MATLAB programing software has been conducted to verify the effectiveness of the proposed control approach for a nonlinear system subjected to both matched and unmatched non-vanishing disturbance and parametric uncertainty. The performance and robustness characteristics of the proposed control scheme and other controllers have been evaluated and compared in a quantitative manner.
Keywords
Introduction
Perturbed systems are widely faced in industrial and medical applications. Examples of such systems include manipulators, hydraulic drives as well as electromechanical systems like induction, synchronous, and DC motors. However, controlling such systems constitutes a vital challenge due to the uncertainty and ambiguity introduced by perturbations. These perturbations, whether they are in the form of uncertainty, disturbance, or a combination of both of them, are crucial in determining the robustness characteristics of the system.1,2 In the sense of nonlinear control, perturbations are classified, according to their effectiveness in the equilibrium set, as vanishing and non-vanishing perturbations; also, according to their impact in the controller column space, as matched and unmatched perturbations. The worst condition that the perturbation exists is the non-vanishing unmatched perturbation, where the best situation any controller can lead to is uniform ultimate boundedness. The race in control theory is to design a controller that offers the least ultimate bound. 3 An additional challenge for nonlinear systems subjected to non-vanishing unmatched perturbation is the unknown upper bound of the perturbation which represents the motivation of this study.
Controlling systems affected by unmatched perturbations with unknown bounds is a challenging problem waiting to be solved. Many attempts are made to cope with the effects of unmatched disturbances by using disturbance observers, adaptive estimators, 4 high-order sliding mode controllers, and approximated sliding mode controllers. These control methods require a prerequisite of disturbance structure. The sliding mode control approach, for example, must know the upper bound of the perturbation, while the adaptive and nonlinear disturbance observers need a slow variation of perturbation. 5
The backstepping control is an effective control algorithm for a class of complex systems with nonlinear dynamic characteristics. The basic concept of backstepping control is to step back through the system channels by breaking down a complex control problem into a series of simpler, interconnected control tasks. By iteratively designing virtual controllers for each of these channels, backstepping control became a suitable approach for stabilizing nonlinear systems in strict-feedback form.3,6 As a nonlinear control technique, the backstepping control strategy has some robustness limitations to handle a wide range of uncertainties, nonlinearities, and disturbances. The tracking performance and asymptotic stability can be achieved for the whole system by stabilizing each subsystem individually. To enhance flexibility and robustness, the backstepping control can be combined with other control techniques like disturbance rejection control or sliding mode control. 7
Sliding mode control (SMC) is a nonlinear control method, which can control the dynamic system insensitively to the matched perturbations. By defining a sliding variable with relative degree one, two phases of control occur: the reaching phase and the sliding phase. In the reaching phase, the controller will attract the system trajectory to the sliding manifold to begin the sliding phase. 8 The sliding phase is where the trajectory rides on the sliding manifold and the control is insensitive to the matched perturbations. The good performance acquired from the SMC is on the price of the chattering appearance in the control signal. However, due to chattering phenomena, the SMC cannot be used as a virtual controller in the backstepping control; as it is difficult to track a virtual controller corrupted by high-frequency chattering during the intermediate step of the backstepping control algorithm. 9 The other concern with SMC is the sensitivity to perturbations in the reaching phase. As such, in order to apply SMC in the backstepping control approach, the chattering problem has to be solved and the reaching phase must be eliminated.5,10
Integral sliding mode control (ISMC), or what is called in some references “disturbance remover,” is an extension to the conventional SMC where the reaching phase is eliminated. The sliding phase will begin from the first moment of controller operation; consequently, the insensitivity to the matched perturbation will also begin from the first moment of controller operation. However, the chattering will still be the profile of the control action. Also, it is worth mentioning that ISMC requires auxiliary dynamics to be added to the system dynamics to achieve the aforementioned performance characteristics.11,12
Barrier function-based SMC extension is firstly proposed in the scheme of adaptive sliding mode control to deal with the over-determined adaptive gain problem. Barrier function-based SMC proposes a boundary layer around zero of the sliding variable, and whenever the sliding variable enters that bound, it will never leave it.13,14 Taking advantage of ISMC, where the sliding variable begins at zero and keeps it for all time, it is possible to incorporate the barrier function for ISMC where an invariant set is defined in the boundary layer around zero of the sliding variable.15,16 Due to the continuous and differentiable nature of the resulting control law and the inherent adaptive mechanism of the BFISMC that rests on the condition of knowing the upper bound of the perturbation, one may apply this as a virtual controller within the steps of the backstepping control algorithm. Hence, the problem of unmatched non-vanishing perturbed systems can be dealt with. Accordingly, a pre-specified small uniform ultimate bound can be acquired by using a backstepping-based barrier function integral sliding mode controller.
In nonlinear control theory, attention has been paid to backstepping controllers with unmatched disturbance. Previous works have addressed this control concern by conducting different control approaches like adaptive higher order SMC disturbance estimation,
17
nonlinear disturbance observer-based backstepping,
18
approximated SMC-based backstepping,
19
ISMC mixed
Despite that all previous researchers in the literature have conducted various control structures to tackle the problem of unmatched perturbation, they could not address the problem of unknown upper bound in the perturbation. This was the motivation key of this study, where a novel control design has been proposed to effectively solve this problem.
It is interesting to combine the barrier function-based integral sliding mode control and backstepping control to achieve the global ultimate boundedness of a controlled system suffering from unmatched perturbation with unknown bounds. In this study, the tracking control problem of the nonlinear system subjected to matched and unmatched perturbations with unknown upper bounds will be solved by proposing a novel backstepping-based barrier function integral sliding mode controller (BS-BFISMC). Also, in addition to the conventional backstepping controller and the sliding mode controller, the suggested controller will be compared with a robust controller that aims to manage the unmatched perturbation in the framework of backstepping control. The latter controller is termed a robust continuous backstepping-based controller (CRBS). Therefore, the contribution of this study is manifold and can be summarized by the following salient points:
1. Design a novel backstepping-based barrier function integral sliding mode control (BFISMC) based on the Lyapunov stability. This novel design will provide the following salient control features:
□ No need for perturbations upper bound.
□ No need for constraint on robust control gain (gain-less or adaptive gain).
□ Chattering-free controller; as there is no need for filters to eliminate high-frequency chattering in the control signal.
□ Pre-specified estimation error bound.
□ Perturbation estimation error convergence from
2. Assessment of estimation and compensation error based on matched and unmatched perturbations using Lyapunov stability analysis, which leads to specifying the uniform ultimate bounds individually.
3. Conduct a comparison study between the proposed control design and the other three controllers: conventional backstepping control, sliding mode control, and robust continuous backstepping-based controller.
The last point in the contribution requires the development of a backstepping control algorithm, nonlinear robust continuous backstepping-based control and the sliding mode control based on Lyapunov stability analysis for the system subjected to matched and unmatched perturbations.
The proposed controller can handle a wide range of electromechanical systems such as DC motors and I.M motors and systems in the strict feedback form subjected to unmatched perturbations with unknown upper bounds such as manipulators and crane systems.42–48
In addition to this section, the rest of the article comes with five sections. In Section 2, the formulation of the control problem and assumptions are presented, Section 3 presents the control design based on Lyapunov stability analysis, Section 4 conducts numerical simulation and discussion of simulation results using an illustrative nonlinear dynamic system, and finally, Section 5 highlights the concluded points.
Problem formulation
For the system of the following dynamics in the strict feedback form

Where


where the state variables
The control aim is to design a robust controller based on backstepping approach such that the:
A continuous function
A continuous function


The proof of Theorem 1 can be found in Ref. 3
Controller design
Backstepping controllers’ extensions to deal with an unmatched disturbance with unknown upper bound have acquired a lot of interest in the nonlinear control theory community. In what follows, the backstepping controller will be designed for systems affected by the non-vanishing matched and unmatched perturbation with unknown upper bound. A solution to this situation will be proposed as a comparison analysis among two controllers in addition to the conventional backstepping, the proposed controllers are named, robust continuous backstepping-based controller (CRBS), and the novel backstepping-based BFISMC (BS-BFISMC). The ultimate bound of the error and the control effort will be the key characteristics to specify the usefulness of the controller.
Backstepping control
The basic concept behind backstepping control involves step back through the system channels, breaking down a complex control problem effectively into a series of simpler interconnected control tasks.46,47 By iteratively designing a virtual controller for each of these channels, backstepping control became a suitable approach for stabilizing nonlinear systems in what is called strict-feedback form. 3
The unmatched perturbation is bounded:

The lumped perturbations are defined as:



will drive the states to a uniform ultimate bound of:

Generally, the virtual controller contains two parts: the first part (


Now let the error of the second channel defined as

The interesting matter of the choice of virtual controller is that all the controller terms must be certain and that’s the reason why the backstepping is sensitive to the non-vanishing unmatched perturbation.
Now, the error dynamics can be considered as

where

The time derivative of equation (12) can be obtained as

by substitute equations (1) and (11) in the equation (13) one can obtain
then according to the backstepping control theory, the control action can be chosen as in equation (6), and that’s leads to,

Reconsidering equation (5), then according to,
3
Let


Hence, according to Theorem 1, the ultimate bound is

▪
The ultimate bound of equation (18) reflects the challenging problem of this study and the backstepping control could not successfully manage the upper system independently. However, rigorous work is required to guarantee this issue. The ultimate bound can be satisfied by the backstepping control approach using the design parameter
Robust continuous backstepping-based controller (CRBS)
Considering the unmatched upper bound in the virtual controller is the key feature of the current enhancement to the backstepping control design to result in what is called backstepping-based robust continuous virtual control law (CRBS). 49
• The lumped perturbations are defined as:

with


where,
and,

will drive the states to a uniform ultimate bound of:
From equation (1), the virtual controller of the upper sub-system is defined as 49 :

where

and hence,
Using the lumped perturbations of equation (19) and controller of equations (21–23), then,

Using the same Lyapunov candidate of equation (12) ends to:

Consider the fact of (Young’s inequality) of
And similarly for the lower sub-system

Then the total Lyapunov candidate time derivative will be assessed to the uniform ultimate boundedness as
Let
Then according to Theorem 1, the ultimate bound is

where

▪
The ultimate bound of equation (35) represents a considerable achievement where the bound depends on some prescribed parameter
Backstepping-based BFISMC controller
There are two issues in fusing ISMC as virtual control with a backstepping approach. The first one is the discontinuous control action due to ISMC, while the unknown perturbation upper bound is the second issue in such integration. Barrier function and integral sliding mode control may collaborate to solve these issues by combining them into the backstepping regime. This results in what so called “backstepping-based barrier function integral sliding mode control (BS-BFISMC).” Firstly, the concept of Barrier Function (BF) will be introduced. 13
In this study, a class of semi-definite BF is considered as
The main result of the present work will be presented after the next proposition, which derives the ultimate bound for a perturbed single input single output (SISO) system, where the controller is designed based on ISMC with the use of a barrier function.
The scalar SISO system is given by:

Where

where

And

Then the closed loop system

where,

And also,

As result, the output


Accordingly, the system model is given in the following form

where

where,

But

where,

To show that the bound above is valid
Then

Eventually, to estimate the ultimate bound on


Then using equation (52)

▪
Regarding the results of Proposition 3 the backstepping-based BFISMC can be designed and assessed in the following proposition.
The unmatched perturbation is bounded, recall equation (3), but
The lumped perturbations are defined as:

with






with the sliding variables


and the design parameters

A corporation design of the Proposition 1 backstepping control procedure and the result of the Proposition 3 of BFISMC. Let

where



and,

Considering control action of equations (60–62) leads to:



For more one time, consider the Lyapunov candidate of equation (12) then:


The ultimate bound of the perturbation estimation error

where,
Then, according to Theorem 1 the ultimate bound is

where,

▪
Also, it is worth mentioning that due to the use of BS + BFISMC, the equivalent control principle must be modified due to the continuous barrier function employment with the suggested controller as considering equations (67) and (71) where,
Proposition 4 contains five design parameters for the proposed controller to be given values by the designer according to the application characteristics. These parameters are
Simulation results
The effectiveness of the proposed control approach, the following case study has been considered for simulations within MATLAB environment.
where,

For the simulation, the system nominal parameters
The considered system is an unstable and nonlinear system subjected to matched and unmatched disturbances and parametric uncertainty.
The design parameters are selected as:
Figure 1 shows the behavior of state variable
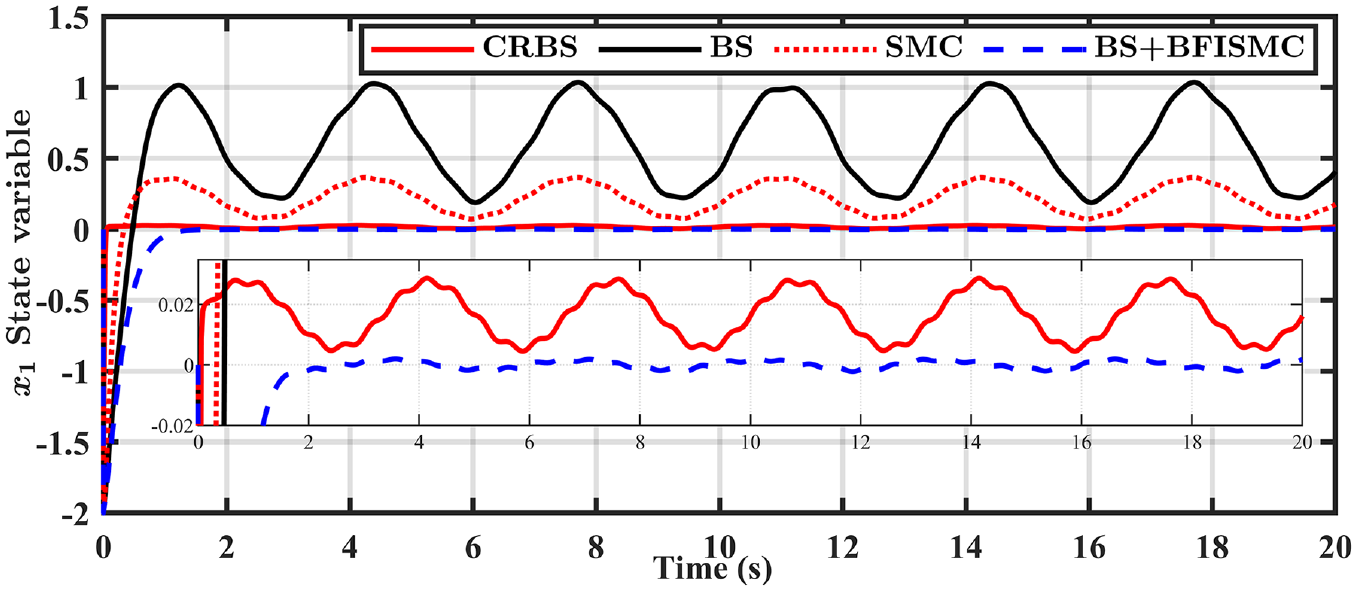
The behavior of state variable
Reports of transient characteristics for state variable
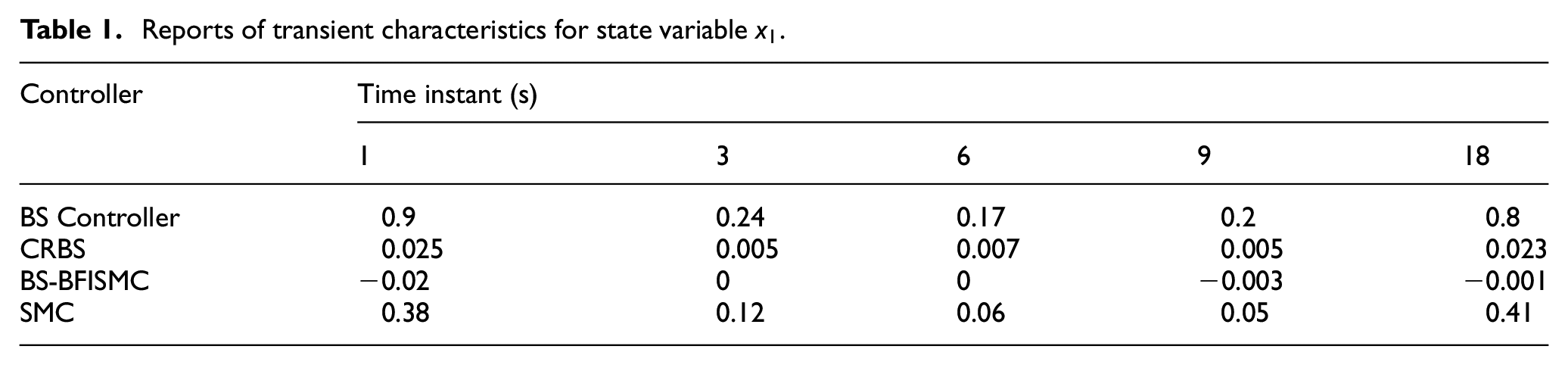
Figure 2 shows the behaviors of state variable
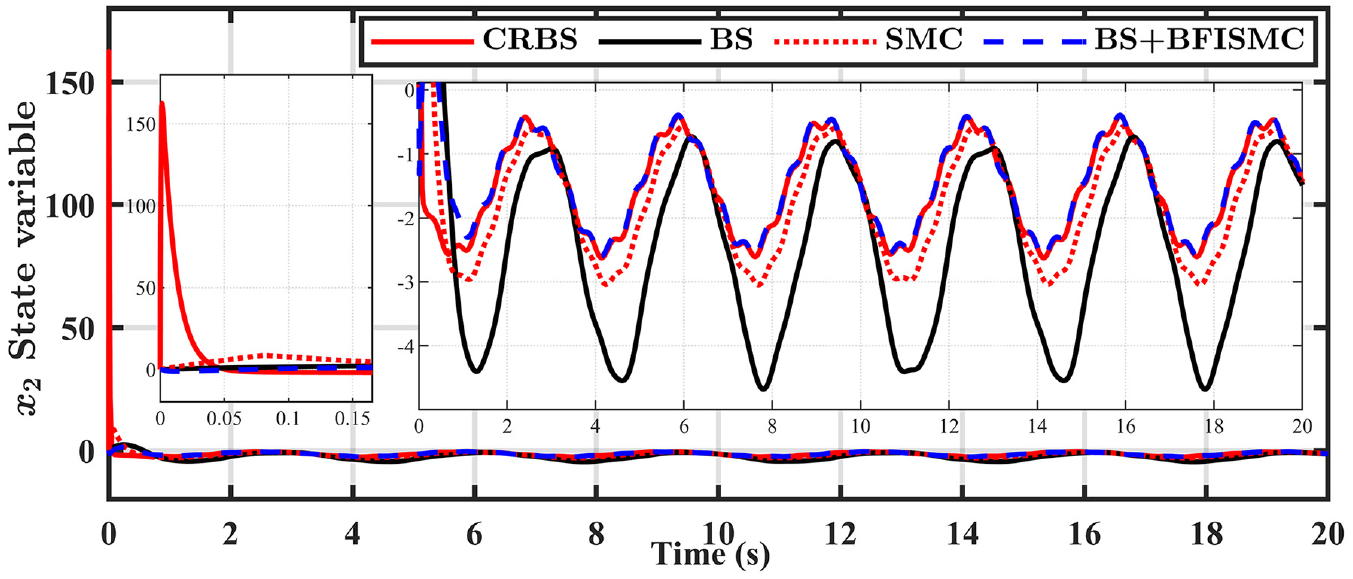
The behavior of state variable
Figure 3 shows the control actions resulting from the four controllers. It is clear from the figure that the control action due to backstepping control is higher than the three other controllers. Moreover, the CRBS gives spiky control action at the startup moment which may reach
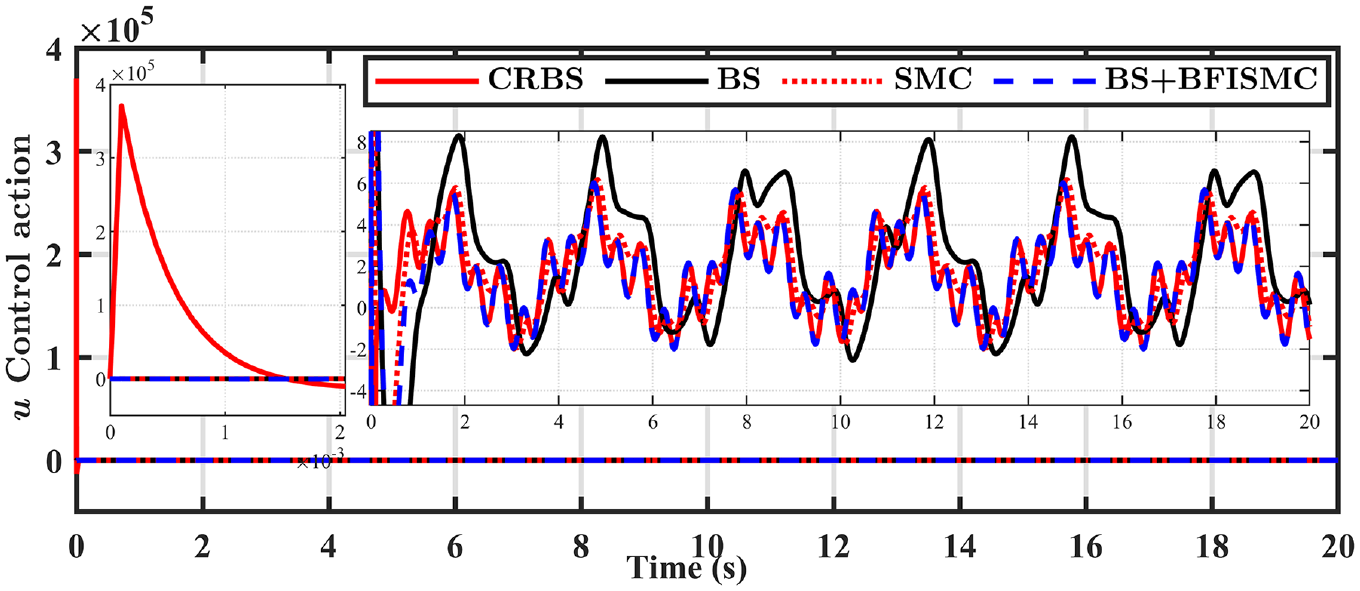
The behaviors of control efforts due to four controllers.
Evaluation of control efforts
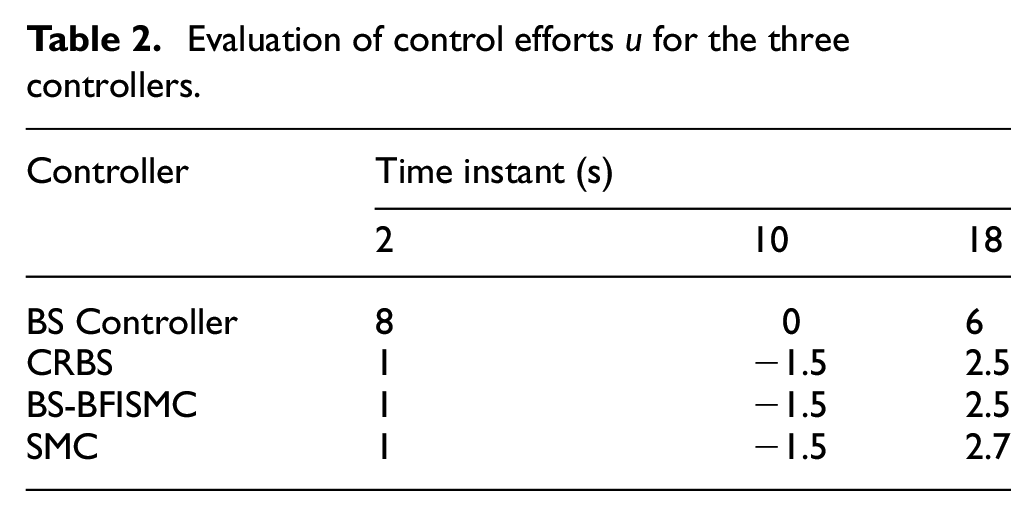
Figure 4 shows the behavior of error
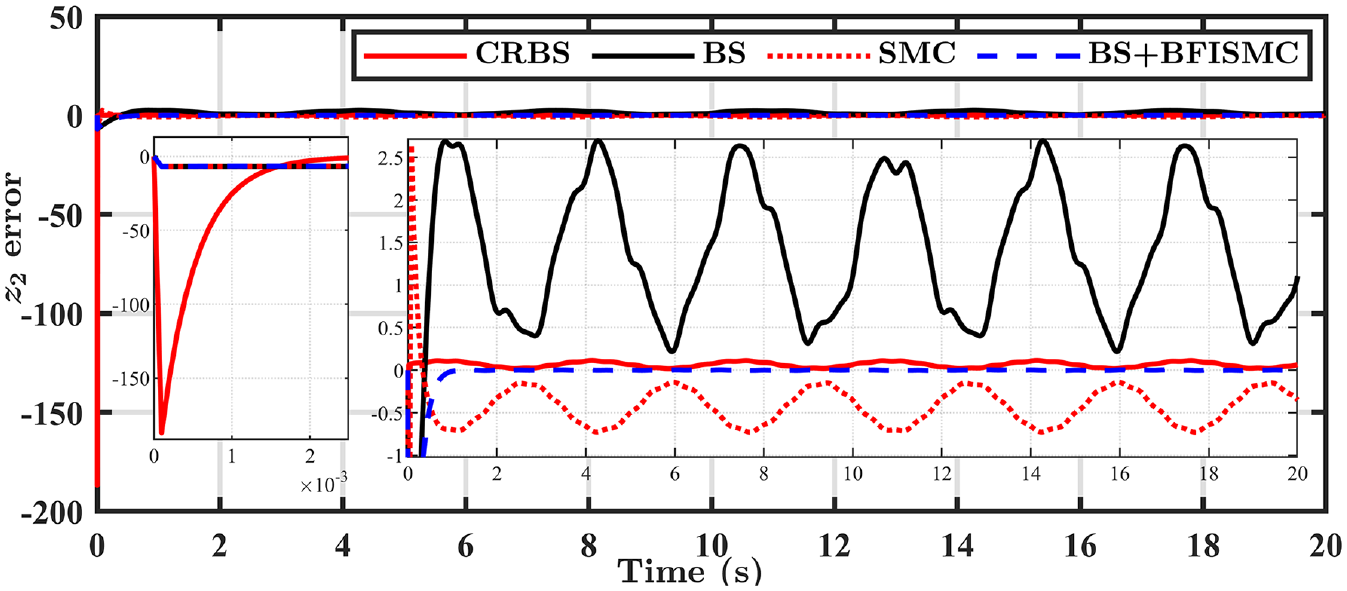
Behaviors of error
Figure 5 shows the behavior of sliding variable
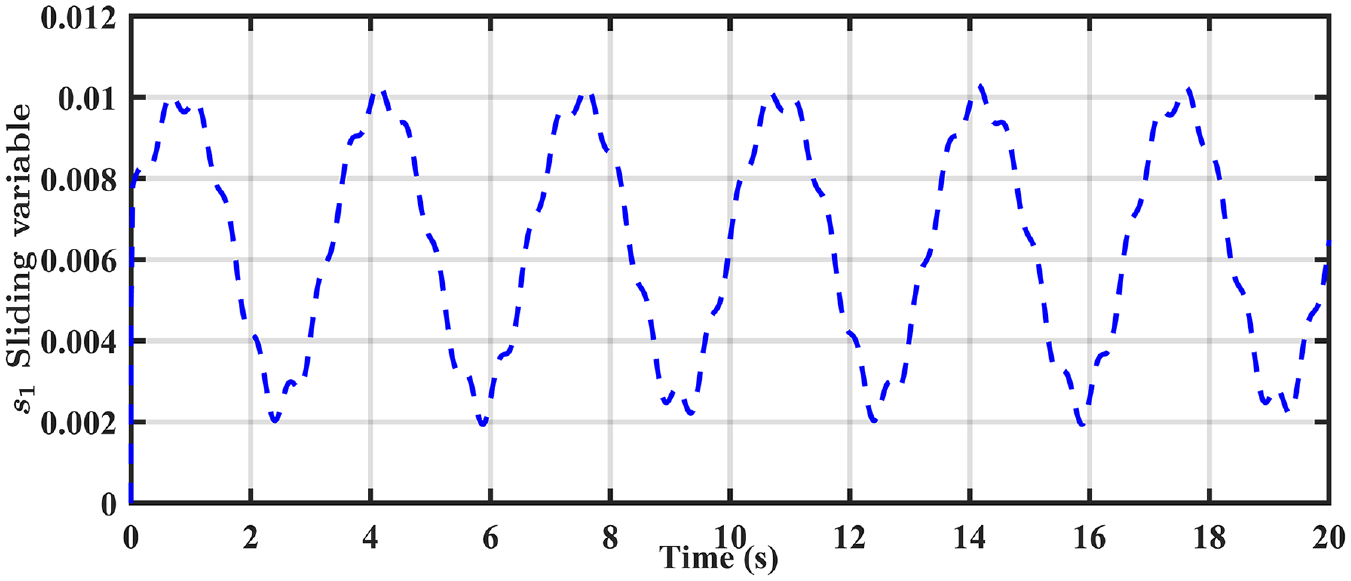
The behavior of sliding variable
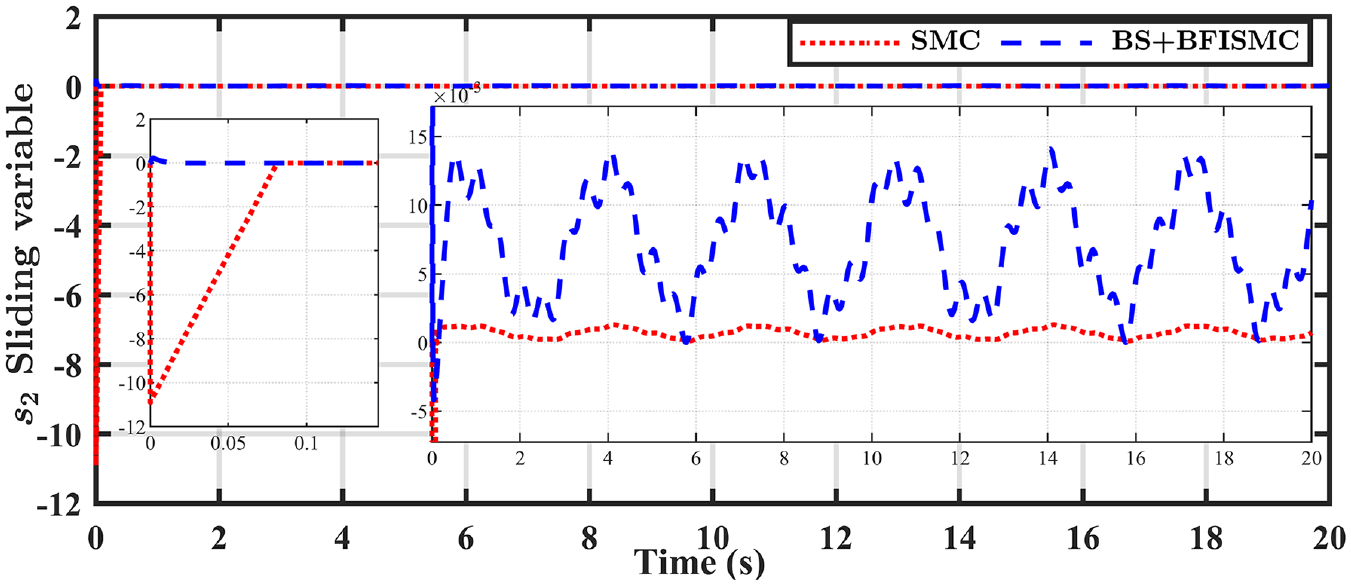
The behavior of sliding variable
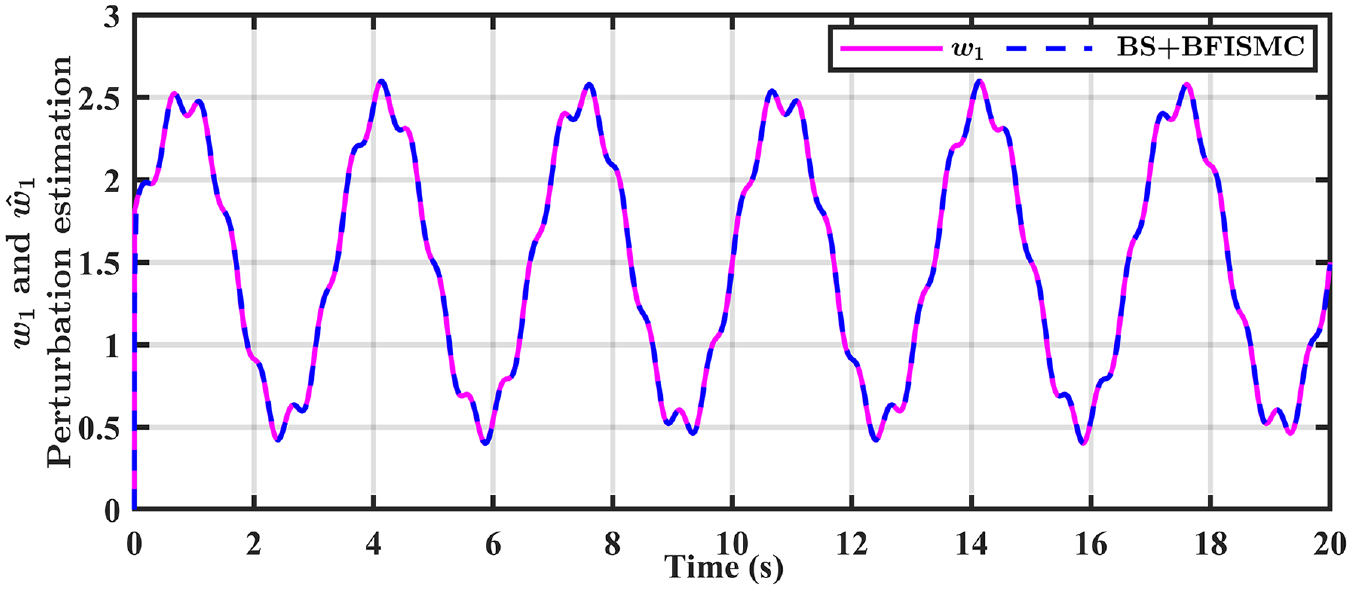
The behavior of actual uncertainty
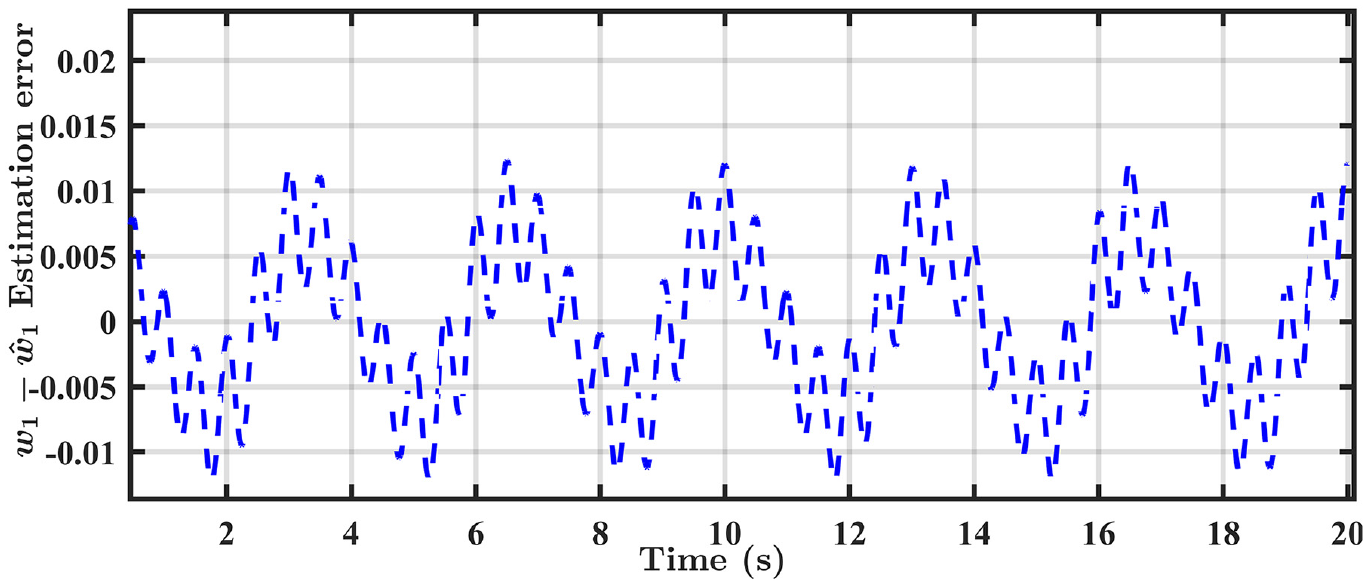
The behavior of estimation error (
Conclusions
This article has presented a solution to the control problem of nonlinear systems with bounded matched and unmatched perturbations (disturbances) with unknown upper bound. Based on the backstepping control approach, a novel backstepping-based barrier function integral sliding mode controller (BS-BFISMC) has been developed for the control of nonlinear systems with bounded matched and unmatched perturbations with an unknown upper bound. According to Lyapunov-stability analysis, the design mechanism utilized the concept of a backstepping control approach by dealing with the overall system as a combination of sub-systems the global stabilization is proven. The contributed feature of BS-BFISMC is that it can cope with perturbation of unknown upper bound and produce chattering-free control action. A comparison has been made between the proposed BS-BFISMC and the other three controllers (BS Controller, SMC controller and CRBS). In the sense of convergence, all states based on all controllers converge to uniform ultimate boundedness. However, the final ultimate boundedness differs from one controller to another. It has been shown that the proposed controller results in the least ultimate bound. Moreover, the BS-BFISMC reaches the ultimate bound with less bound limits. In addition, the control action consumption can be sorted from lower to higher as BS-BFISMC controller, CRBS, SMC and BS Controller.
Footnotes
A.1- Appendix (SMC)
will drive the states to a uniform ultimate bound of:
which implies
and
The time derivative of equation (A4), ends to
The following sliding is defined
The time derivative of the sliding variable of equation (A8) becomes
The control objective is converted to stabilize the sliding variable. Generally, using Lyapunov analysis of the sliding variable dynamics of equation (A9) as,
Using the Control action of equation (A3), equation (A11) can be rewritten as
Choosing large enough
Substitute equations (A13) in (6), then
The ultimate bound of equation (A14) can be assesses by the following Lyapunov candidate of the form
The time derivative of equation (A15) can be obtained as
then according to,
3
Let
Or,
Hence, according to Theorem 1, the ultimate bound is
▪
The ultimate bound of equation (A19) reflects the challenging problem of this study and even a robust controller like SMC could fail to successfully manage the upper system in asymptotic manner.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.