
Abstract
Considering the real scenario in China, in order to decrease passenger transfer, cross-line trains are scheduled extensively for the large number of cross-line passenger flow. Therefore, in this paper, we propose a more practical approach aiming to schedule more trains within a limit time horizon by both main-line train and cross-line train scheduling optimization (train timetable and stopping plan optimization). We find that the train scheduling and passenger assignment problems are multi-commodity flow problems. The trains (as the users) share the railway capacities (as the resource) in a high-speed railway network, and the passengers (as the users) share the train carrying capacities (as the resource). Thus, based on this, we formulate two space–time networks—train and passenger space–time networks—to present the train operation and the passenger flow, respectively. In addition, we regard train disturbances in different directions as different train headways at cross-line stations to optimize train scheduling practically. Sequentially, a mixed-integer linear programing model with headway and coupling constraints is formulated. To solve the model efficiently for a large-scale application, we decompose the problem into two space–time path-searching sub-problems based on the passenger and train space–time networks by the Lagrangian relaxation and alternating direction method of multipliers decomposition methods. Finally, we adopt the Taiyuan–Dezhou and Zhengzhou–Beijing high-speed railway networks in a practical experiment, and an experiment without cross-line operation is designed to test the effect of cross-line operation. The results show the proposed approach can obtain a no-conflict timetable and all the passenger demand can be satisfied, meanwhile, the capacity can improve 20.7% when the cross-line operation is not considered.
Keywords
Introduction
Motivation
Compared to other transportation modes, high-speed railway has become more well-known over the past 10 years owing to the advantages of security, speed, convenience, comfort, and punctuality. Besides, with the rapid development of high-speed railways, efficiently and effectively operating the high-speed railway becomes more important for the railway operators, and capacity reasonable utilization is an urgent problem to be solved. Therefore, in this paper, train timetable and stopping plan generation method is designed to optimize the use of space-time resources for high-speed railway.
In the railway operation procedure, line plan (including the train origin and destination (OD), train type, train stopping plan, and train operation frequency) and timetable formulation are two important steps. Line plan is done based on the passenger demand, and the timetable is generated based on the line plan Yan et al. 1 Figure 1 shows the relationship among passenger demand, train line plan, and train timetable considered in this study. Because of the characteristics of high-speed railway, trains cannot operate during the maintenance time window (5–6 h); therefore, they operate in a limited time and have insufficient high-speed railway capacity. Moreover, with the development of technology and economy, passengers have numerous travel demands; consequently all the trains determined by the line plan may not be operated. Furthermore, considering that the train stopping plan has a significant effect on the high-speed railway capacity, in our study, we removed the generated stopping plan from the line plan. Therefore, we proposed a method to schedule trains reasonably and maximize the number of scheduling trains by (1) train timetable optimization introduced in Barrena et al. 2 and Jensen et al.2 3 (2) improving the stopping plan introduced in Parbo et al. 4 and Lee et al. 5 under the oversaturation condition. In detail, when the trains determined by the line plan cannot be scheduled completely, train timetable and stopping plan optimizations are adopted for operating more trains to carry increased number of passengers.
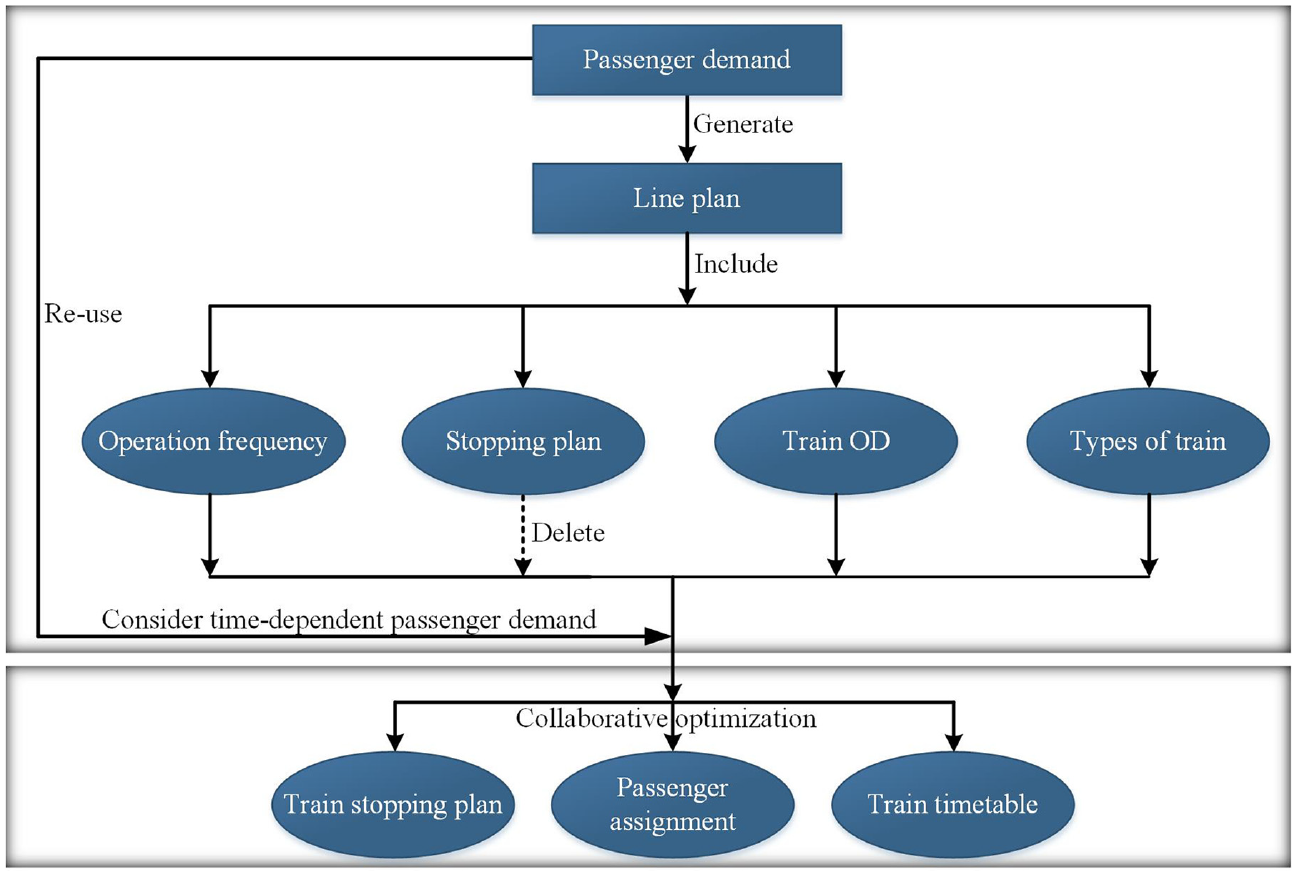
Relationship among passenger demand, train line plan, and train timetable.
In general, for a railway, the train timetable determines the train arrival, departure, and stopping times for every visited station, and the train stopping plan determines whether a train stops at a specific station. Therefore, the train timetable and the stopping plan have a strong relation Yang et al. 6 First, a train stopping plan is generated, and subsequently, the train timetable is formulated according to the previously generated stopping plan. However, a feasible train stopping plan may generate an infeasible train timetable, which could, in turn, have an effect on the stopping plan; therefore, a collaborative optimization of train timetables and stopping plans is necessary and must be efficient. Some studies, such as Dong et al., 7 Cacchiani et al., 8 and Qi et al., 9 integrated the optimizations of a train timetable and a stopping plan. In comparison, some cases, such as Wang et al., 10 optimized the problem as a bi-level solution, in which the stopping plan is obtained by a high-level optimization and the timetable by a low-level optimization using the results of the high-level one. Figure 2 shows the effect of a timetable and a stopping plan on train scheduling. In Figure 2(a), only three trains can be scheduled in a limited period. Figure 2(b) shows an improved stopping plan and timetable, five trains can be scheduled in a same period. Therefore, the train stopping plan of a railway plays an important role in train scheduling and subsequently affects the railway capacity.
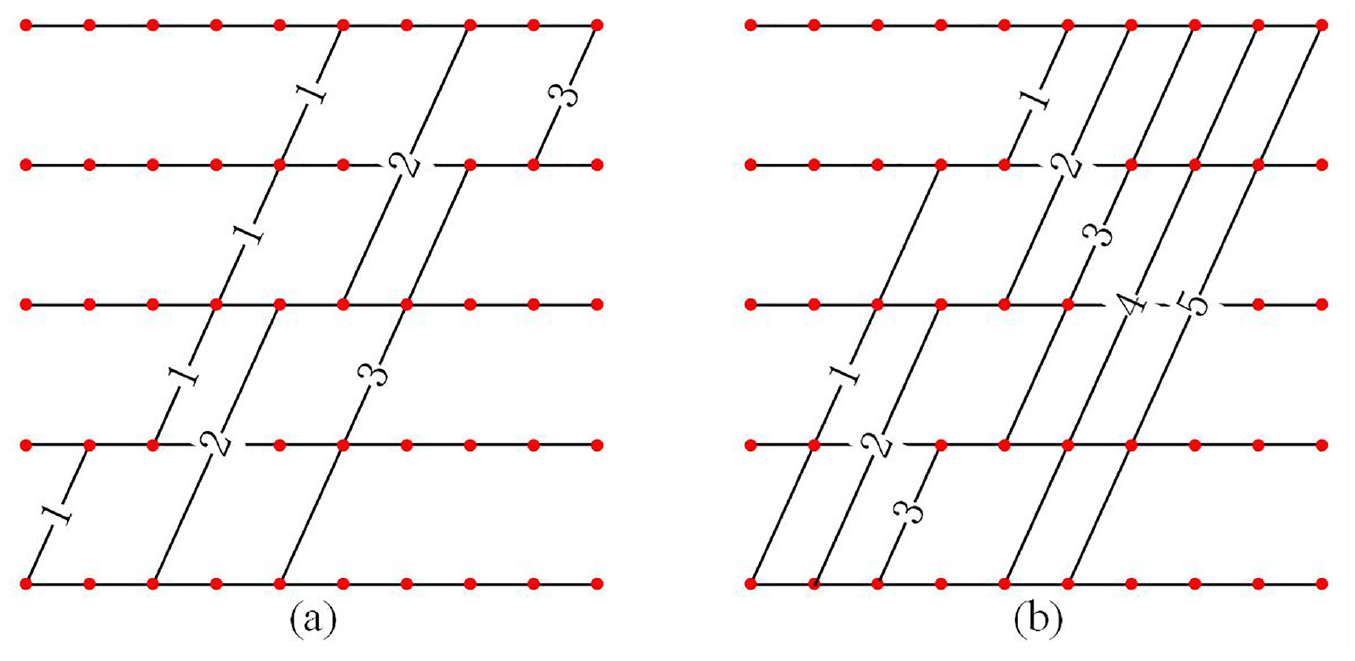
Scheduling trains with different train timetables and stopping plans: (a) Timetable with initial stopping plan and (b) Timetable with optimized stopping plan.
It is known that the high-speed railway in China has a network structure in which many lines are arranged in a crisscross pattern; interested readers can refer to Wang 11 for the high-speed railway scenarios in China and the effect of cross-line trains. Operators prefer scheduling more trains for passengers to arrive at their destinations without transfer; therefore, many trains may have a cross-line operation at a specific station to carry more cross-line passenger flow. For example, the trains traveling from Beijing to Taiyuan have a cross-line operation at the Shijiazhuang station. The cross-line trains may crosscut the station throat and disturb other trains when departure or arrive the cross-line station. However, studies with regard to cross-line trains are almost in urban railway transit, such as Yang et al., 12 and only few researchers are studying train scheduling problems considering cross-line trains in high-speed railway. To obtain precise and realistic optimization results, we consider cross-line trains in this study. For the proposed problem, we introduce the following definitions:
(1) Line: High-speed railway in the railway planning period.
(2) Main-line trains: Trains that always operate in one line.
(3) Cross-line trains: Trains that have cross-line operations from one line to another line. For example, line 1 is composed of station A, station B, and station C, line 2 is composed of station D, station B, and station E, the trains operate from station A to station D or from station A to station E are cross-line trains.
(4) Cross-line passengers: Passengers that travel from one line to another line. For example, line 1 is composed of station A, station B, and station C, line 2 is composed of station D, station B, and station E, the passengers travel from station A to station D or from station A to station E are cross-line passengers.
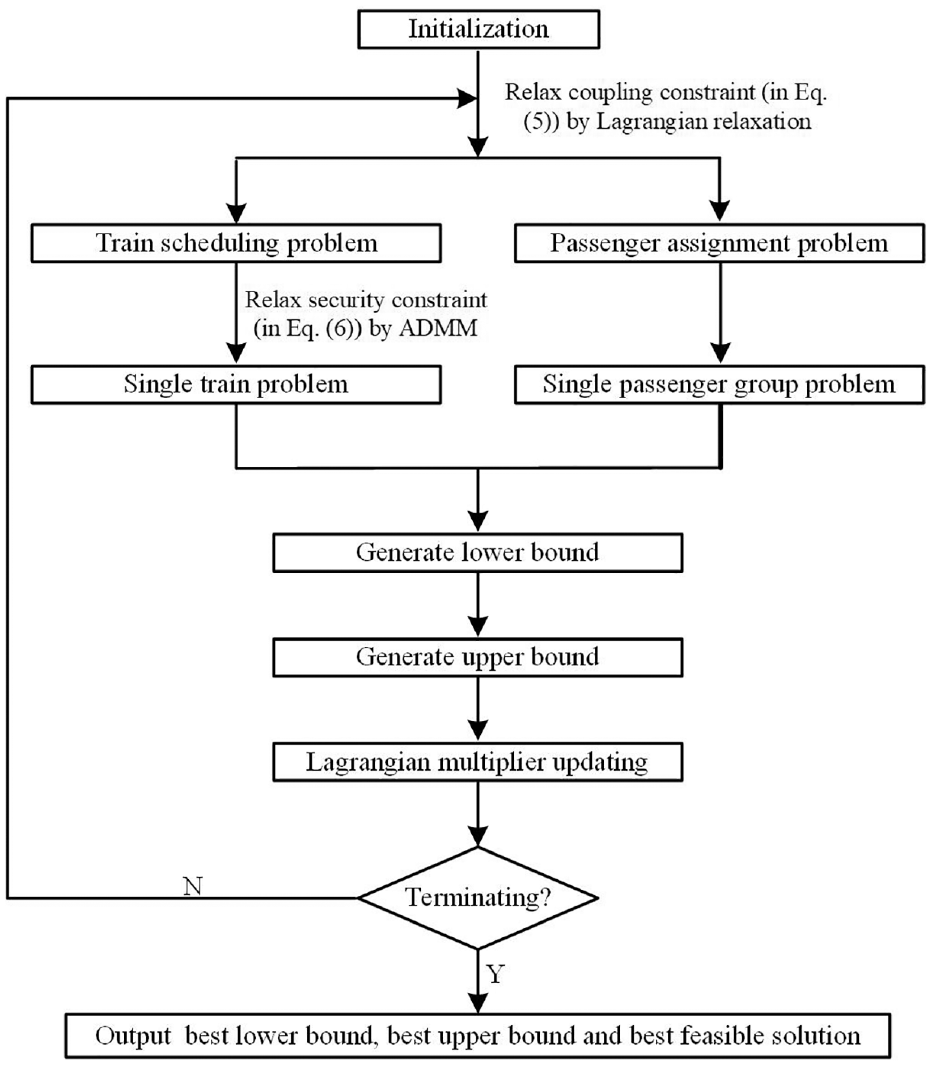
Figure 3 shows the flowchart of the proposed problem of this study. First, the train OD, passenger demand, basic parameters, and physical network are provided as the input of the model. Specifically, the basic parameters are the train travel time and the train headway, etc. Second, the passenger and train space–time networks are formulated to present the problems, and a mixed-integer linear programing (MILP) model is also built to maximize the number of scheduling trains. Subsequently, Lagrangian relaxation-based and alternating direction method of multipliers (ADMM)-based solution frameworks are utilized to decompose the original problem into several shortest path-searching problems. Finally, the train timetable, train stopping plan, and passenger assignment results are obtained.
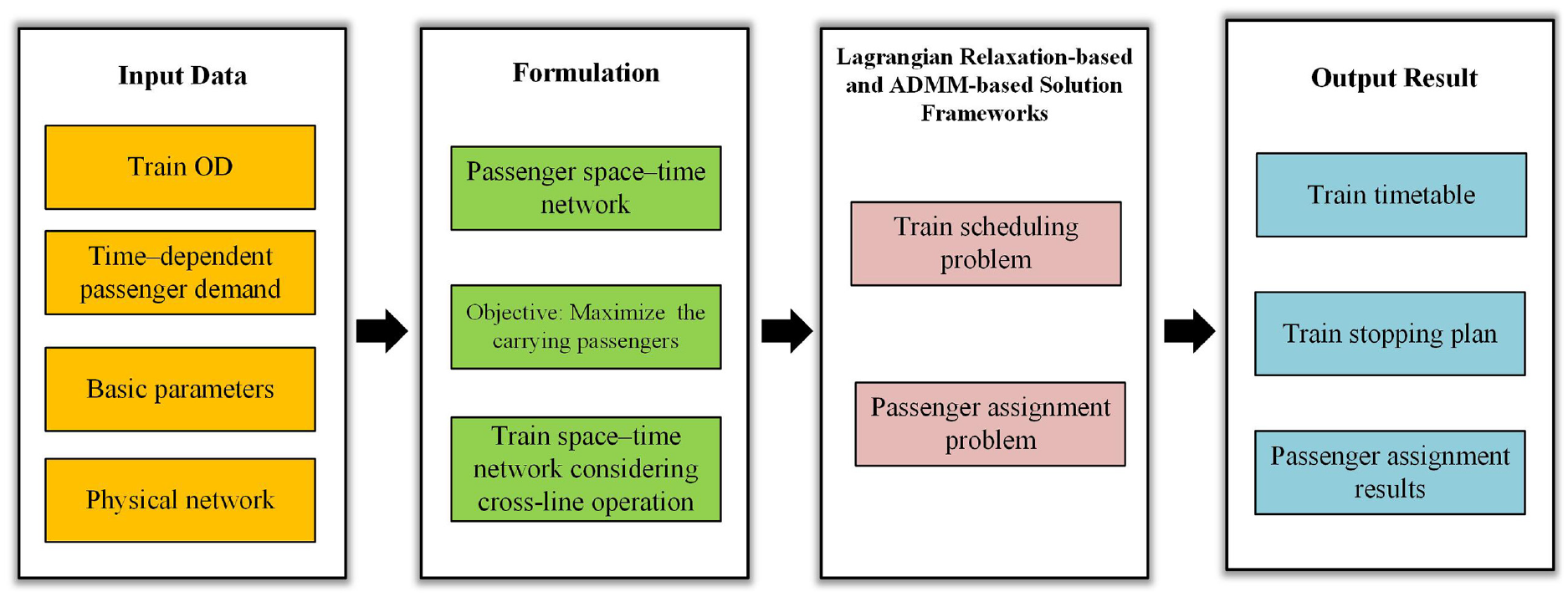
Flowchart of proposed problem.
Literature review
The train stopping plan of a railway, which is the input of the train timetable, is very important to determine whether a train stopping at a station is satisfying the passenger demand. There are many studies on the train stopping plan problem. Altazin et al., 13 Zheng et al., 14 Shang et al., 15 Jamili and Pourseyed Aghaee 16 presented a skip–stop strategy to generate the stopping plan. Chang et al. 17 formulated a multi-objective programing model to optimize train service by adjusting the stopping plan and frequency.
The train timetable of a railway determines the arrival, departure, and stopping times of each train at each station. A quality timetable can provide better service to passengers and generate more profits for the operators. Different researchers focused on different objective, Higgins et al. 18 optimized the train timetable for minimizing the consumption cost, Cacchiani et al. 19 aim to yield a regular, efficient, and robust timetable, Cacchiani et al. 19 proposed an integer linear programing model for a timetable problem to maximize the profits. In order to increase the efficiency of the algorithm, some methods, like Lagrangian relaxation and ADMM decomposition method were adopted. Meng and Zhou 20 and Liao et al. 21 conducted train timetable optimization based on the cumulative flow, and the Lagrangian relaxation-based decomposition and solution framework algorithm was designed to solve the problem efficiently. Zhang et al. 22 formulated an extended space–time network to solve a cyclic timetable, and subsequently presented a multi-commodity network flow model with two coupled schedule networks and side track capacity constraints. For efficient solving, the Lagrangian relaxation and ADMM decomposition methods were adopted to dualize the side track capacity constraints into several train-specific subproblems, which could be solved by forward dynamic programing to determine the time-dependent least-cost path. Brännlund et al. 23 presented a novel timetable optimization approach, which was a very large integer programing problem. The Lagrangian relaxation algorithm was used to solve this problem efficiently, and the method was tested on a real-world case of the Swedish National Railway Administration. Lamorgese et al. 24 designed an approach to produce a timetable in a short time, based on which the proposed problem was solved by decomposing it into line and station problems. Caprara et al. 25 proposed a graph–theoretic formulation for a train timetable problem, which was used to establish an integer linear programing model. Subsequently, the Lagrangian relaxation algorithm was used to solve the problem efficiently, and the variables in the relaxed constraints were associated only with nodes.
The stopping plan is the input of the train timetable of a railway; however, a series of trains with a given stoppling plan based on passenger demand might have overwhelmed capacity occupation and therefore impossible to be scheduled in a given time slot. Furthermore, the generated train timetable can, in turn, have an effect on the train stopping plan; therefore, they have a strong relation, and increasing number of studies are optimizing both simultaneously. Yang et al. 6 presented a new collaborative optimization method for both stopping planning and train scheduling problems to minimize the total dwell time and the total delay between the real and expected departure times from an origin station. These problems can be solved by CPLEX directly. Yue et al. 26 formulated a space–time network and established an MILP model, which was decomposed by Lagrangian relaxation and solved by column generation, to maximize the profits of trains. Finally, they conducted a test on the Beijing–Shanghai high-speed railway. Gao et al. 27 studied the problem of adding new trains to an existing timetable in a busy railway. A bi-level MILP model was presented to minimize the train travel time and the deviation between the original and new timetables. Subsequently, they used a three-stage method to solve the problem. Jiang et al. 28 introduced a method by scheduling new trains and adjusting the dwelling time or a skip–stop strategy based on the current timetable to increase the number of scheduled trains. The established model was solved by a heuristic algorithm extended from a previous method. Meng and Zhou 29 proposed an integrated team-based optimization model and solution algorithms with complex constraints for selecting the stop pattern for each train and for timetable optimization. The model was aimed at maximizing the transport profit and considered the effect of the service interval times on the passenger demand. Niu et al. 30 proposed a train scheduling optimization model with given skip-stop pattern to minimize the total passenger waiting time under both minute- and hour-dependent demand volumes for different origin–destination pairs. Li et al. 31 studied train stop patterns and train schedules collaboratively, and formulated a mixed-integer nonlinear programing model with passenger route choices to minimize the passenger travel time in express/local mode. Cacchiani et al. 8 optimized the train timetable and stopping pattern with passenger demand uncertainty to obtain robust solutions. And several experiments were designed based on Wuhan-Guangzhou high-speed railway, which showed the proposed approach can reduce the number of unsatisfied passengers in more effective way. Dong et al. 7 presented a mixed integer nonlinear programing model to optimize both train timetable and stopping plan based on time-dependent passenger demand for commuter railways, and more realistic conditions like no predefined schedule, oversaturation, etc. are considered. The model can be solved by an extended adaptive large-scale neighborhood search algorithm efficiently. Boroun et al. 32 solved the joint timetable and stopping plan problem in a double-track railway with station capacity and time-dependent dwell time constraints to minimize the schedule makespan. Then a heuristic algorithm is adopted to obtain approximate solutions in the large-scale experiment.
Table 1 compares previous studies and the present one on stopping plan and timetable collaborative optimization. We find that there are few existing studies considering the effect of cross-line operations, and the headway is only determined between trains running on the same line. Therefore, the results may be impractical without introducing the cross-line operation and different headways at a cross-line station. Yang et al., 6 Yue et al., 26 Cacchiani et al., 8 and Li et al. 31 solved the integration problem by considering passenger demand as a static value which neglects the dynamics of passenger demand and may obtain a unrealistic result. Jiang et al. 28 optimized the problem by applying constraints on the maximum number of stops that can be canceled; however, they did not consider the passenger demand. Meng and Zhou, 29 Niu et al., 30 Boroun et al., 32 and Li et al. 31 predefined an alternative set of stopping plans, which simplified the problem and reduced the solution space significantly. Moreover, the objectives of most studies are minimizing the total travel time, total dwell time, and total delay or maximizing the operation profits. There are only few studies focused on the railway capacity. Therefore, in this study, our model maximizes the number of scheduling trains by train scheduling optimization while considering cross-line trains.
Comparison of previous studies and this study on stopping plan and timetable collaborative optimization.
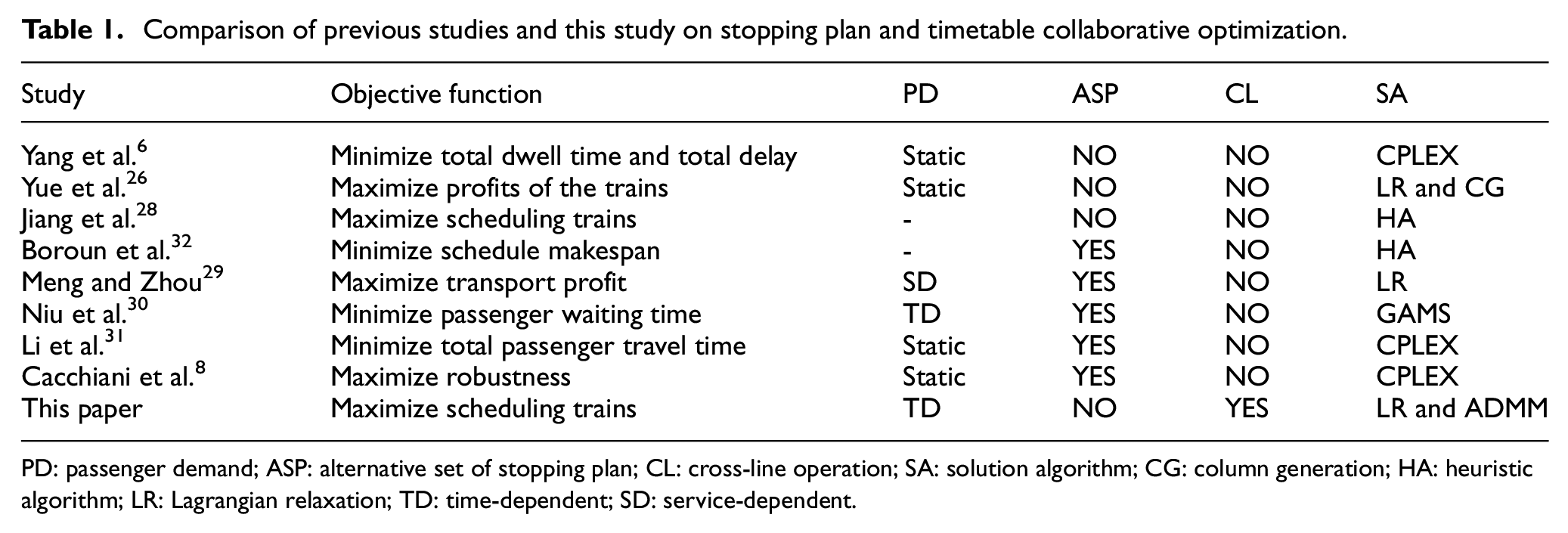
PD: passenger demand; ASP: alternative set of stopping plan; CL: cross-line operation; SA: solution algorithm; CG: column generation; HA: heuristic algorithm; LR: Lagrangian relaxation; TD: time-dependent; SD: service-dependent.
Contribution
Based on the abovementioned literature review, there are many studies on the train scheduling problem for a long time. Owing to the increasing passenger demands and the insufficient railway capacity, train timetable and stopping plan collaborative optimization must be considered to mitigate the railway capacity problem. In addition, the Chinese high-speed railway has a network structure, and cross-line operations, which have strong effects on train scheduling optimization, are inevitable; however, there is no study considering cross-line trains, which is impractical. Therefore, the contributions of this study can be summarized as follows:
We propose a solution to optimize train timetable and stopping plan collaboratively for increasing the railway capacity based on the current line plan. Concurrently, the proposed method considers cross-line operations, which has been rarely considered in the train scheduling problem research. In addition, trains from different directions may have disturbing depending on the station yard layout. Therefore, these problems are dealt with by introducing a headway and re-determining the headway between each pair of trains at cross-line stations. To input the passenger demand for the stopping plan generation and consider the passenger differences in time distribution, we also present a passenger assignment based on the train service.
We innovatively propose a Lagrangian relaxation-based and ADMM-based decomposition algorithm to solve the formulated MILP model efficiently with several operation constraints and a coupling constraint. Lagrangian relaxation-based decomposition methods are used to relax the coupling constraint. Consequently, the original problem is decomposed into two subproblems: train scheduling and passenger assignment. The passenger assignment problem can be divided into a series of least-cost path-searching problems in the passenger space–time network. Moreover, the train headway constraint of the trains can be relaxed by an ADMM-based decomposition method owing to the advantage of breaking the model symmetry. Therefore, the train scheduling subproblem is decomposed into a series of least-cost path-searching problems in the train space–time network.
The remainder of this paper is organized as follows. Section 2 presents the problem statement, construction of both the space–time networks, and notations of the model. Section 3 formulates the MILP model based on time-discretized time–space networks. Section 4 introduces the Lagrangian relaxation and ADMM-based decomposition methods. In Section 5, the proposed model and algorithm are demonstrated by a simple numerical experiment and a real-world numerical experiment based on the Taiyuan–Dezhou and Zhengzhou–Beijing high-speed railways. Section 6 presents the conclusions of this study.
Problem statement and notations
Notations
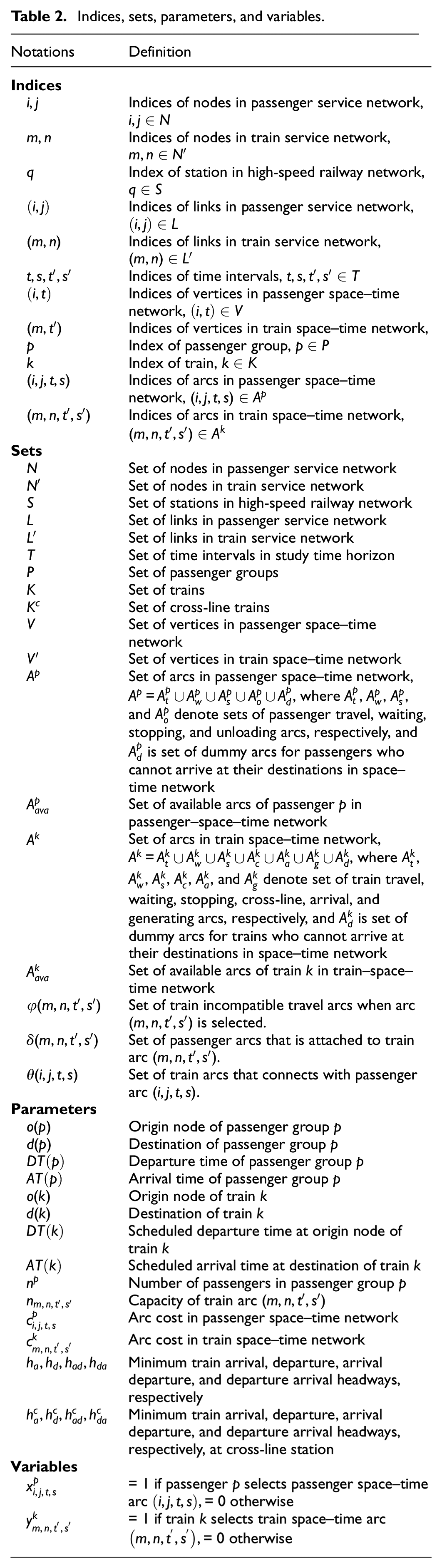
The notations used in this paper are listed in Table 2.
Indices, sets, parameters, and variables.
Problem statement
In a high-speed railway network, operators schedule trains based on the passenger demand. Figure 4(a) shows a simple case of the physical network of a high-speed railway, including physical stations and links. We construct a train service network,
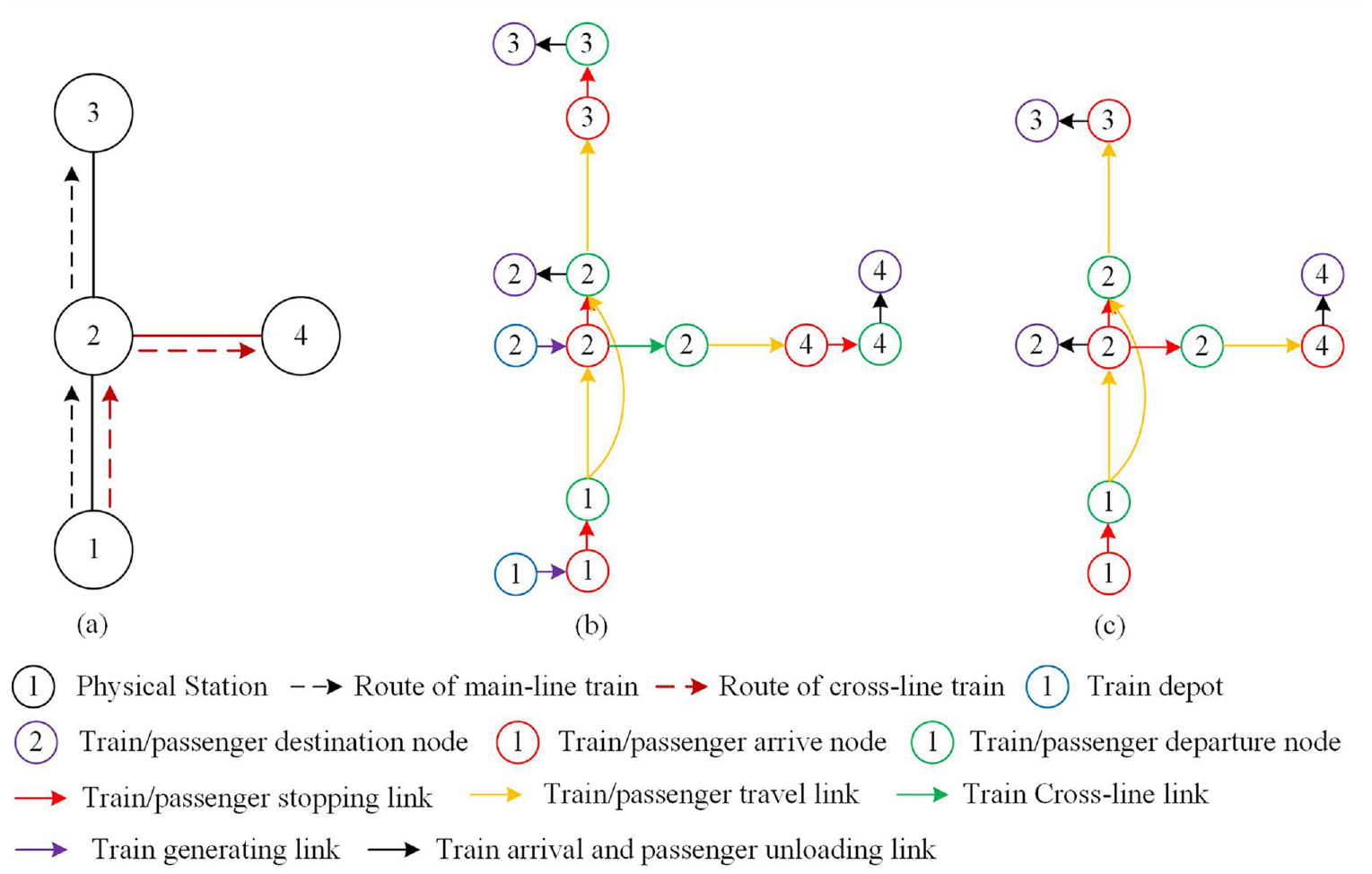
(a) Physical network of high-speed railway, (b) Train service network, and (c) Passenger service network.
Construction of space–time networks
Construction of train space–time network
Based on the train service network, we introduce the time dimension. The train space–time network,
(1) Train stopping arcs are built as
(2) Cross-line arcs are built as
(3) Train travel arcs are built as
(4) Train generating arcs are built as
(5) Train waiting arcs are built as
(6) Trains arrival arcs are built as
(7) Train dummy arcs are built as
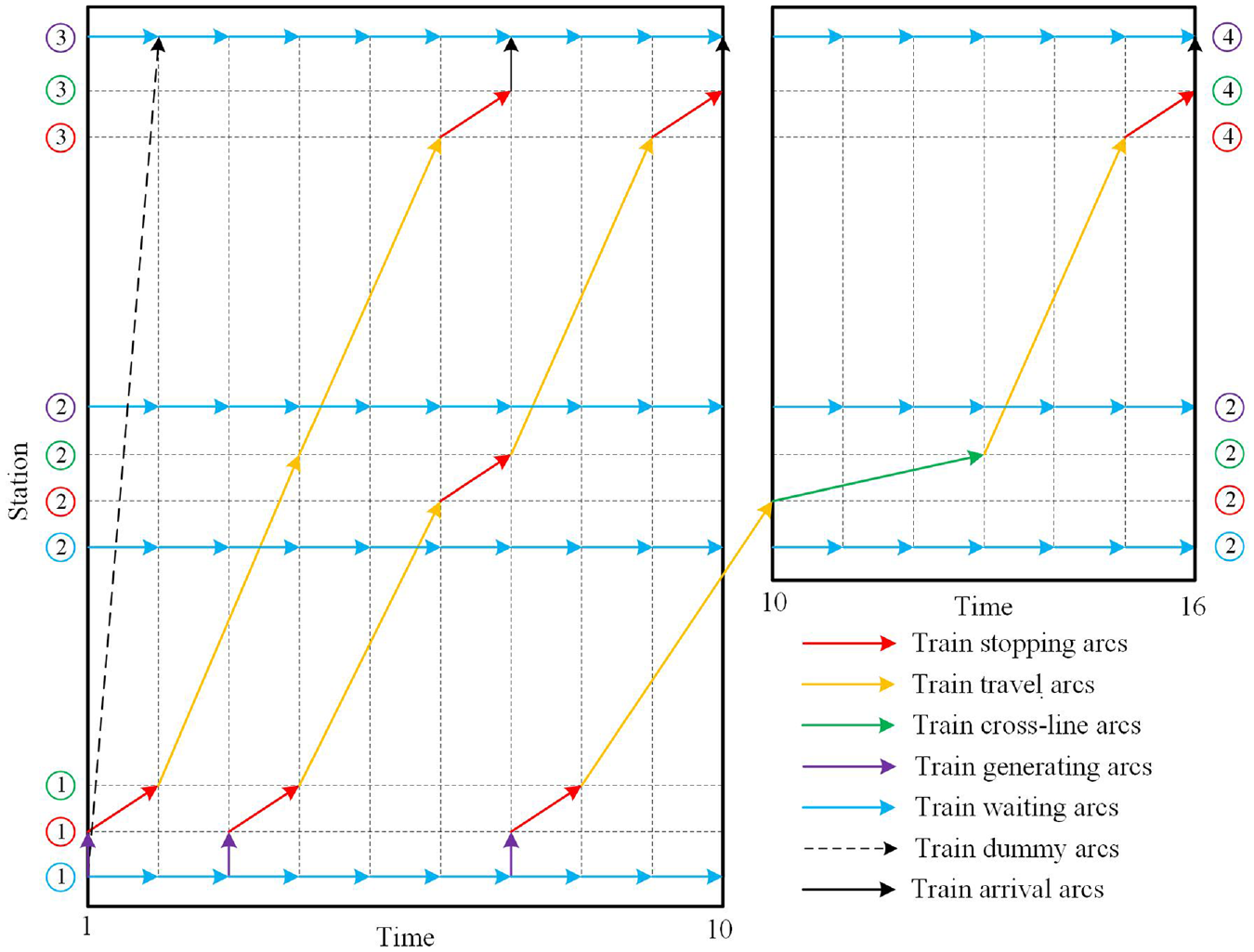
Train space–time network of simple case.
The total cost of the train stopping, train cross-line, and train travel arcs is set as the actual time spent in the real world, and the cost of the train dummy arcs is very high.
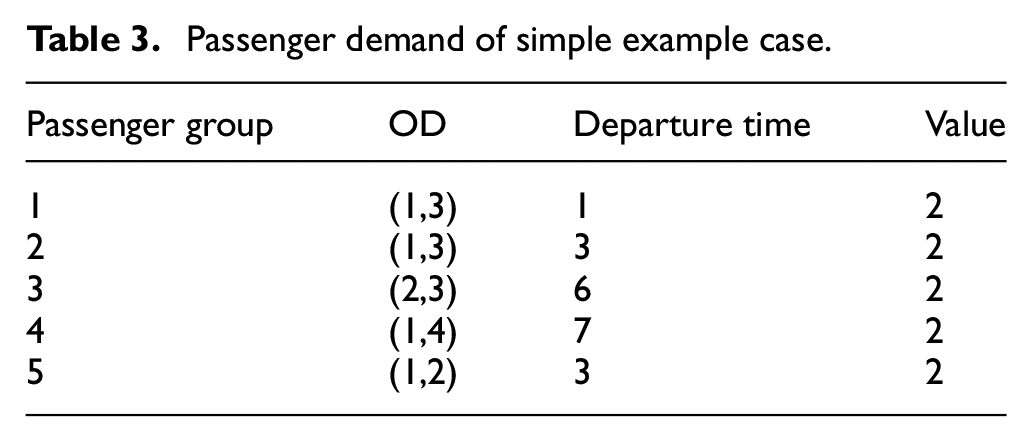
For a clear illustration, we adopt the simple case introduced in Section 2.2 to present the space–time networks. The passenger demand as listed in Table 3 comprises the passenger group OD, departure time, and number of passengers in each passenger group. The generated train timetable and the stopping plan are as shown in Table 4, and the corresponding train space–time network of lines 1 and 2 is displayed in Figure 5. The time interval of the network is set as one-time unit.
Passenger demand of simple example case.
Train timetable and stopping plan of simple example case.

Construction of passenger space–time network
Based on the passenger service network, we introduce the time dimension, and subsequently formulate the passenger space–time network,
(1) Passenger travel arcs are built as
(2) Passenger stopping arcs are built as
(3) Unloading arcs are built as
(4) Passenger waiting arcs are built as
(5) Passenger dummy arcs are built as
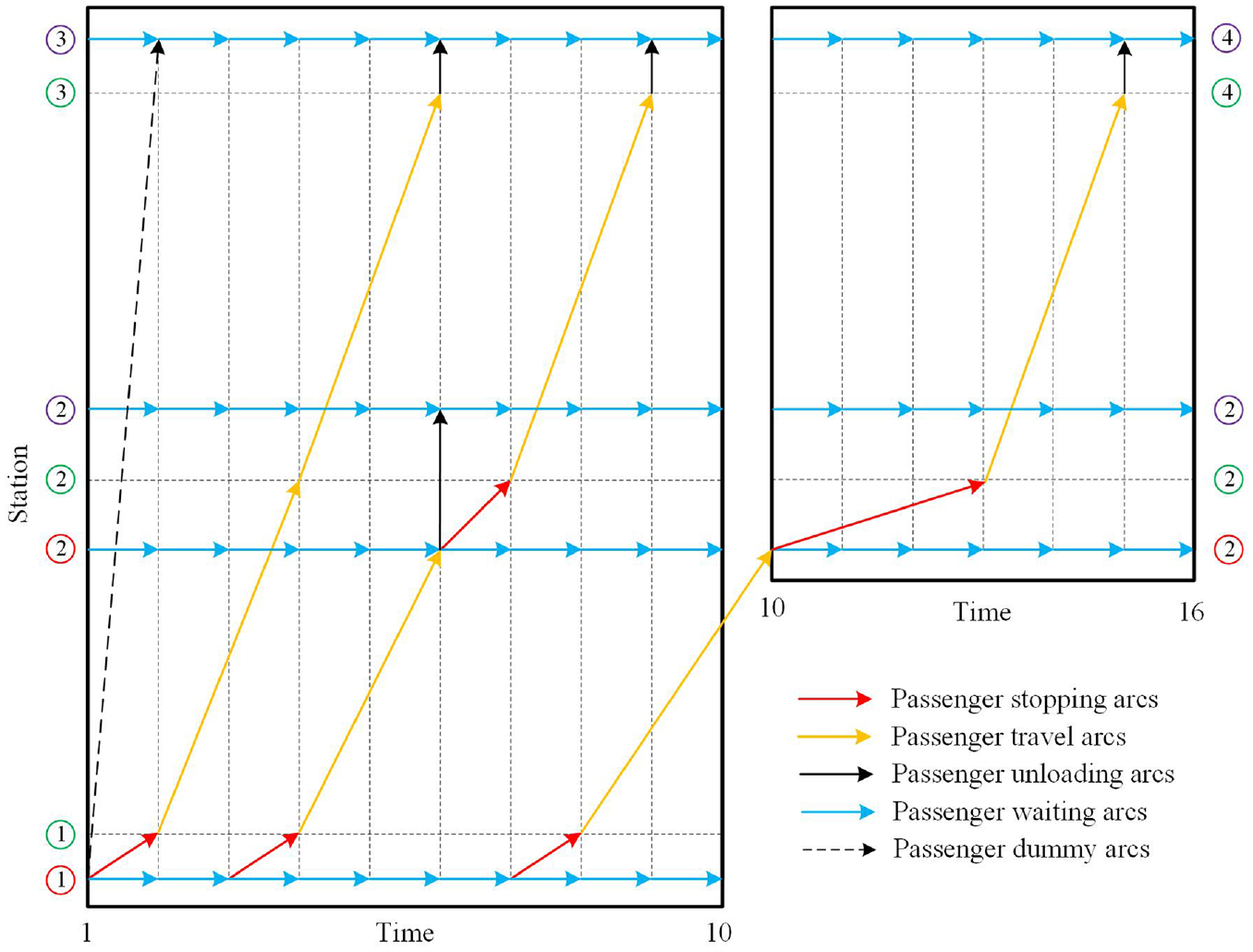
Passenger space–time network of simple example case.
In this study, we integrate the passengers who have the same ODs and departure times into a group. Moreover, the passenger transfer arcs are not set because the transfer passengers should also buy tickets for boarding the transfer train; we regard them as the original passengers at the transfer stations.
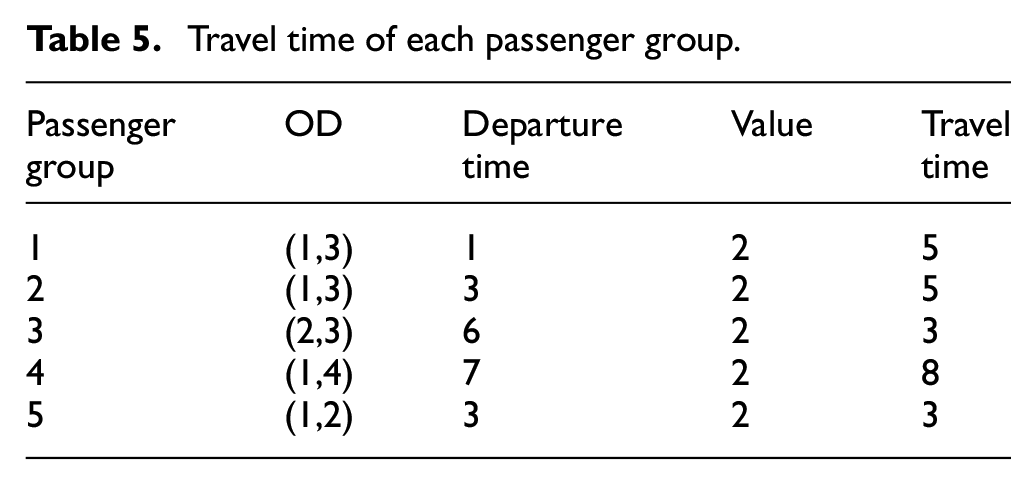
Table 5 summarizes the travel time of each passenger group in the simple example case.
Travel time of each passenger group.
Model formulation
In this study, we aim to optimize the train timetable and stopping plan for mitigating the capacity of a high-speed railway. Therefore, based on the train and passenger space–time networks proposed above, an MILP model, is formulated.
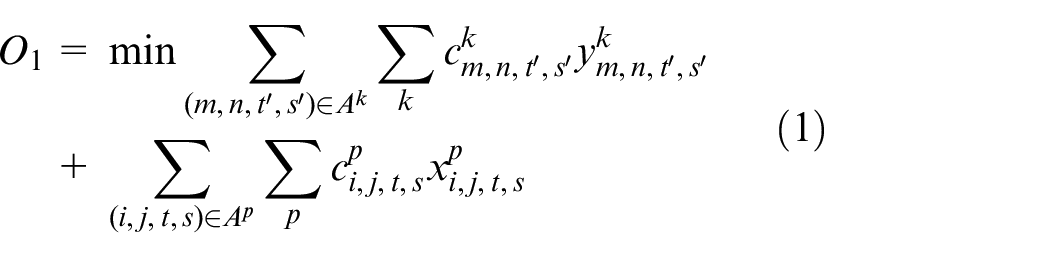
Objective function
The objective of model
Cross-line train constraint
In our proposed model, cross-line trains are considered to improve its practicality and universality. Actually, a cross-line train has a cross-line operation at a cross-line station; therefore, in response to the model, cross-line train

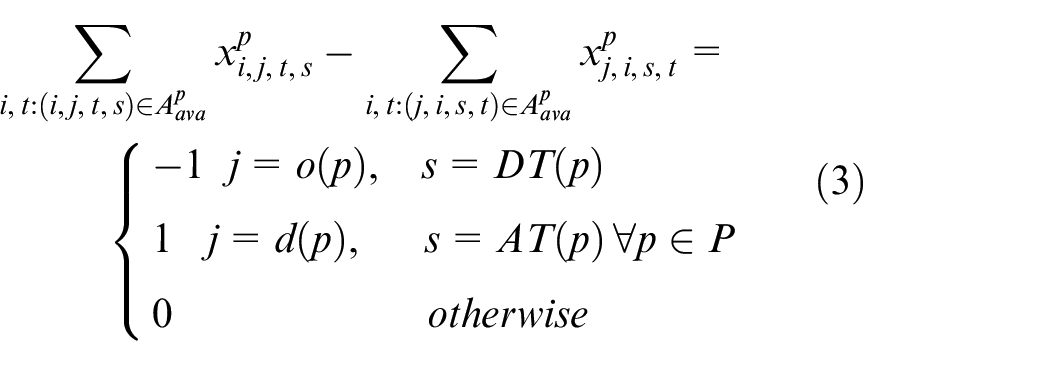
Passenger group flow balance constraint
We introduce the available arc set,
Train flow balance constraint
Similarly, we introduce the available arc set,
Passenger flow and train flow coupling constraint
Based on the two space–time networks, the passenger flow depends on the train flow, which suggests that passenger group
It should be noted that there are approximation errors in constraint (equation (5)) when we divide the passengers into passenger groups. For example, if the number of passenger groups boarding train
Train headway constraint
To ensure train operation security, the minimum headway between two adjacent trains should be introduced. In this paper, we introduce four types of headway, which are shown in Figure 7. Figure 7(a) to (d) display the minimum headways between two arrival trains, two departure trains, an arrival train and a departure train, and a departure train and an arrival train, respectively.
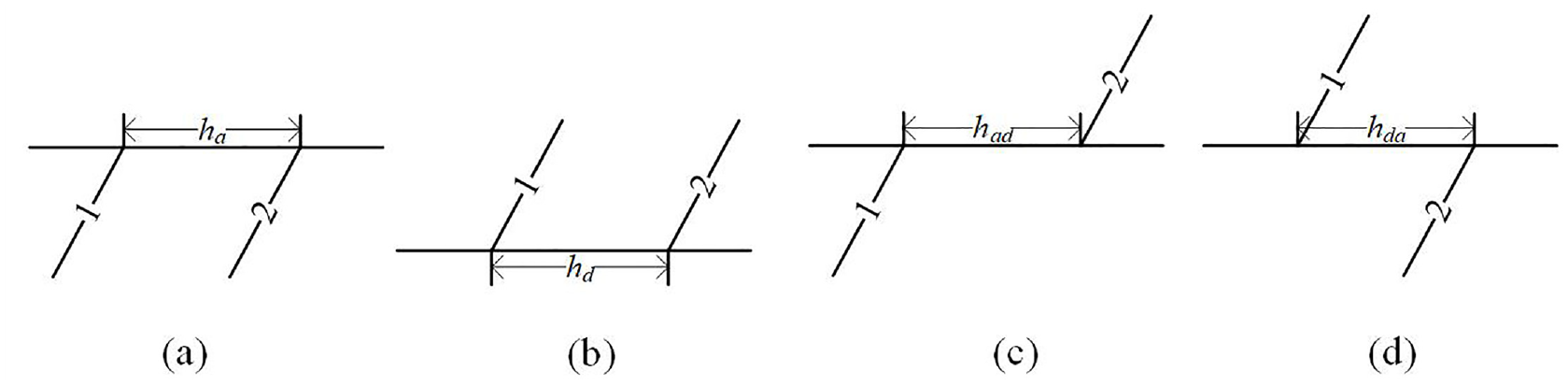
Minimum headways between (a) two arrival trains, (b) two departure trains, (c) arrival and departure trains, (d) departure and arrival trains.
Accordingly, incompatible arc set
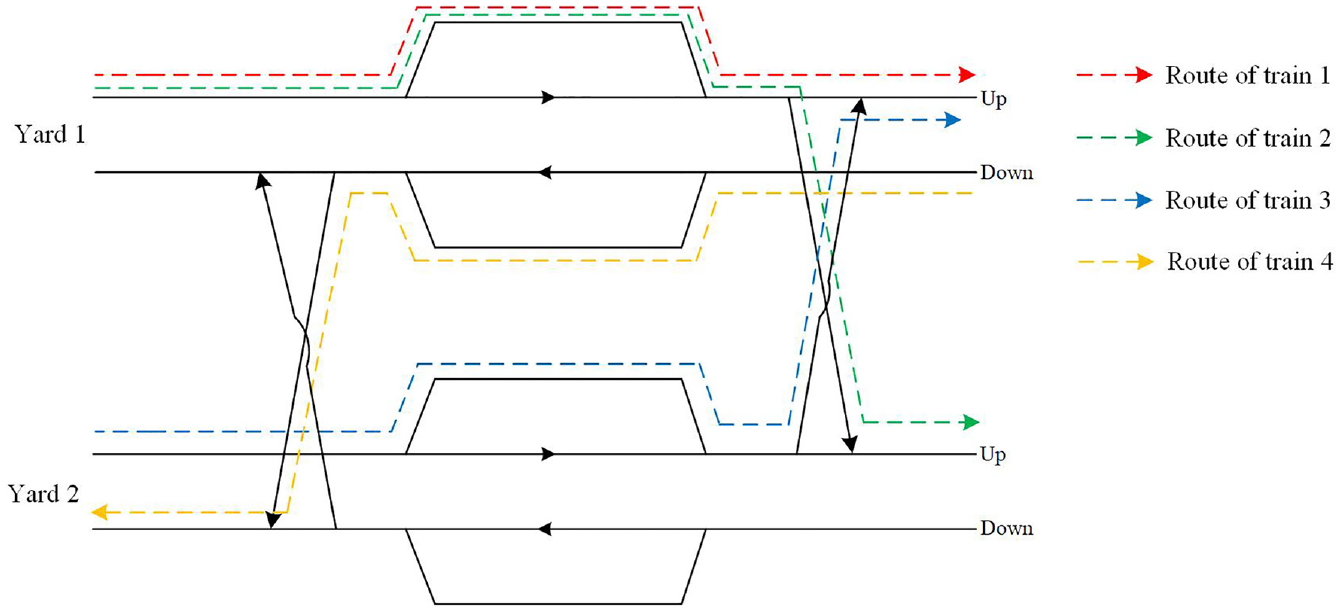
Different train routes at cross-line station yard.
Headways of different trains at cross-line station.
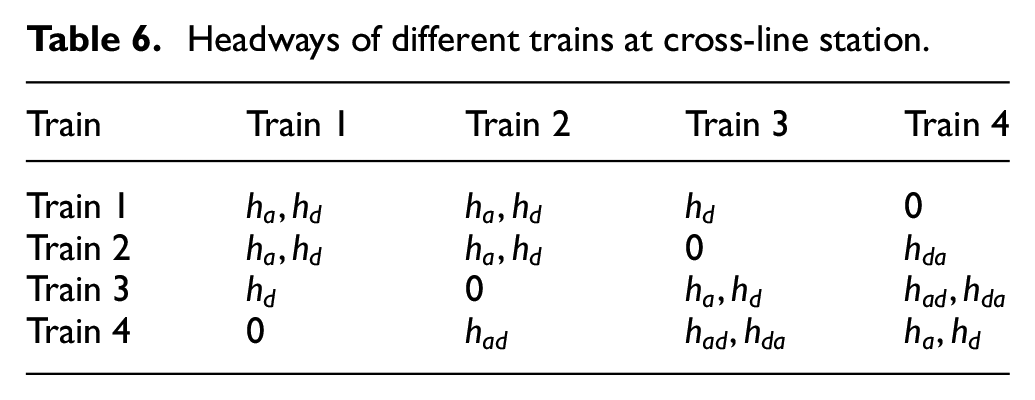
Therefore, the global incompatible arc set is

Binary variable constraint
The passenger group binary variable constraint is expressed in equation (7); specifically, if passenger group


Solution methods
In this section, two decomposition methods—the Lagrangian relaxation and ADMM decomposition methods—are introduced to solve the proposed MILP model. For easy description of our model, we use
Lagrangian relaxation-based decomposition method
Lagrangian relaxation, which was introduced by Shang et al. 33 and Wang et al. 34 is extensively used to solve large-scale optimization problems by relaxing the complex constraints into an objective function. Subsequently, the original problem can be decomposed into several sub-problems.
In the proposed model,
Objective function of model
Subject to
Constraints (3), (4), (6), (7), and (8).
Model
Sub-problem model
Objective function:


Subject to:
Constraints (4), (6), and (8)
Sub-problem
Objective function:




Subject to
Constraints (3) and (7).
ADMM-based decomposition method
The ADMM, which has the advantages of breaking the symmetry and strong convexity, is a combination of augmented Lagrangian relaxation and the block coordinate descent method Yao et al. 35 Augmented Lagrangian relaxation adds a quadratic penalty term to the objective function based on the Lagrangian relaxation described in Section 4.1. Compared to Lagrangian relaxation, augmented Lagrangian relaxation can improve the robustness and functional convexity Zhang et al. 22 However, the quadratic penalty term leads to nonlinearity of the model; therefore, it is difficult to decompose the model into several independent subproblems. Subsequently, the block coordinate descent method is introduced to update the variables sequentially in a block-by-block manner and make the quadratic penalty term linear.
The proposed train scheduling model,
Model
Objective function:

We can find headway constraint (equation (6)) is an inequality equation. Considering the ADMM decomposition method can only be applied on equality equation, a slack variable
For easy solving, the quadratic term needs to be linearized; interested readers can refer to Yao et al.
35
and Zhang et al.
22
for the linearization in ADMM. In this study we introduce
Then the quadratic term is transformed as equation (19).
When
Then, we can find that constraints (4) and (8) are independent of each train, the model is decomposed into several shortest-path searching problems for each train. Finally, model
Subject to:
Constraints in equations (5) and (9).

In model
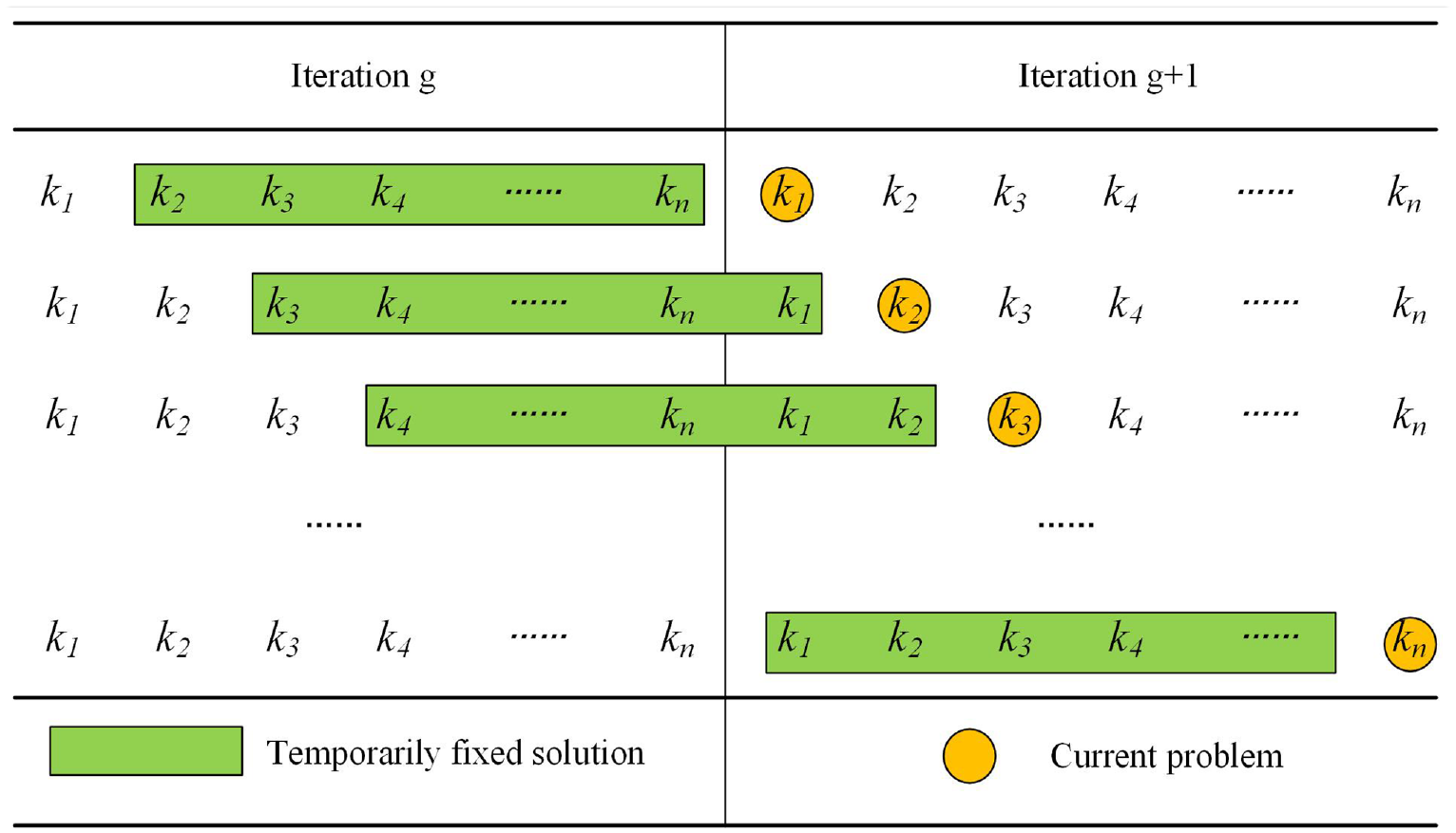
Rolling update scheme of ADMM for solving train scheduling problem.
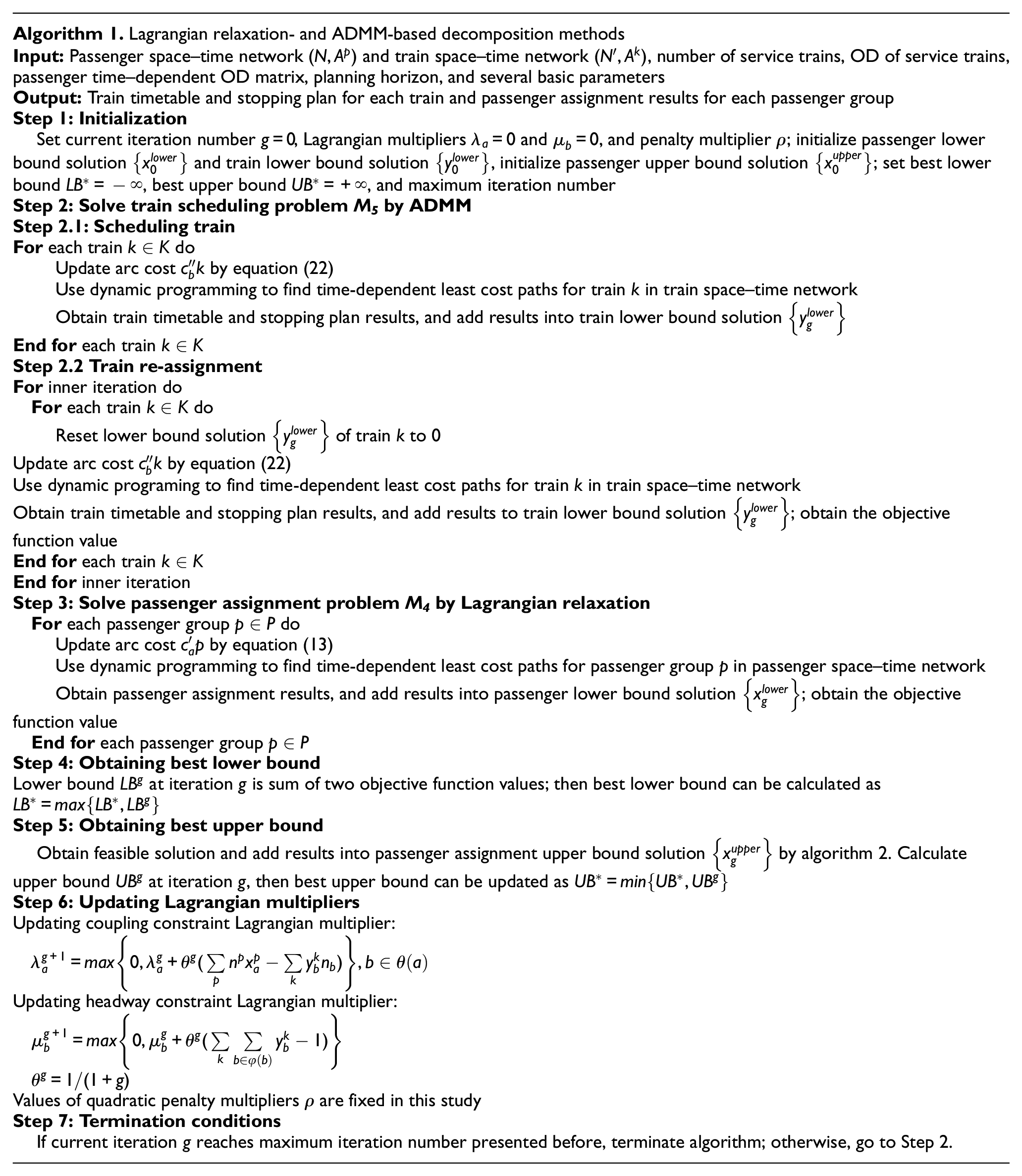
Algorithm 1 presents the details of the Lagrangian relaxation- and ADMM-based decomposition methods to solve the train scheduling problem (model
Iterative structure of proposed approach based on Lagrangian relaxation and ADMM decomposition methods.
Numerical experiments
Simple experiment
Description
In this section, we present a simple case with nine stations, as shown in Figure 11(a). The station sequences of the main-line and cross-line trains are (1,2,3,4,5,6) and (1,2,3,4,7,8,9), respectively, and station 4 is the cross-line station. We only consider one direction to test the proposed approach, and perform sensitivity analysis for this simple case. The layout of cross-line station 4 is displayed in Figure 11(b), and accordingly we can determine the train headway, which is described in Section 3.6. We set the travel time between each station pair as 4, the minimum and maximum train stopping times as 2 and 3, respectively, at each station, and the cross-line time as 4. The time horizon of the simple case is set as 45; therefore, the time interval can be set as 1 in the space–time network. Train departure headway
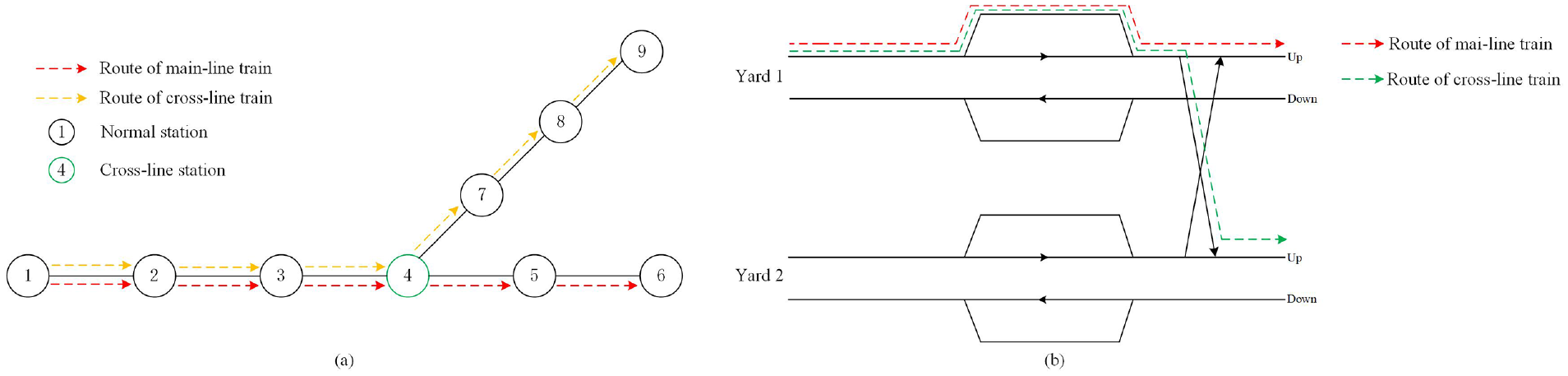
(a) Physical network of simple case and (b) Layout of cross-line station 4.
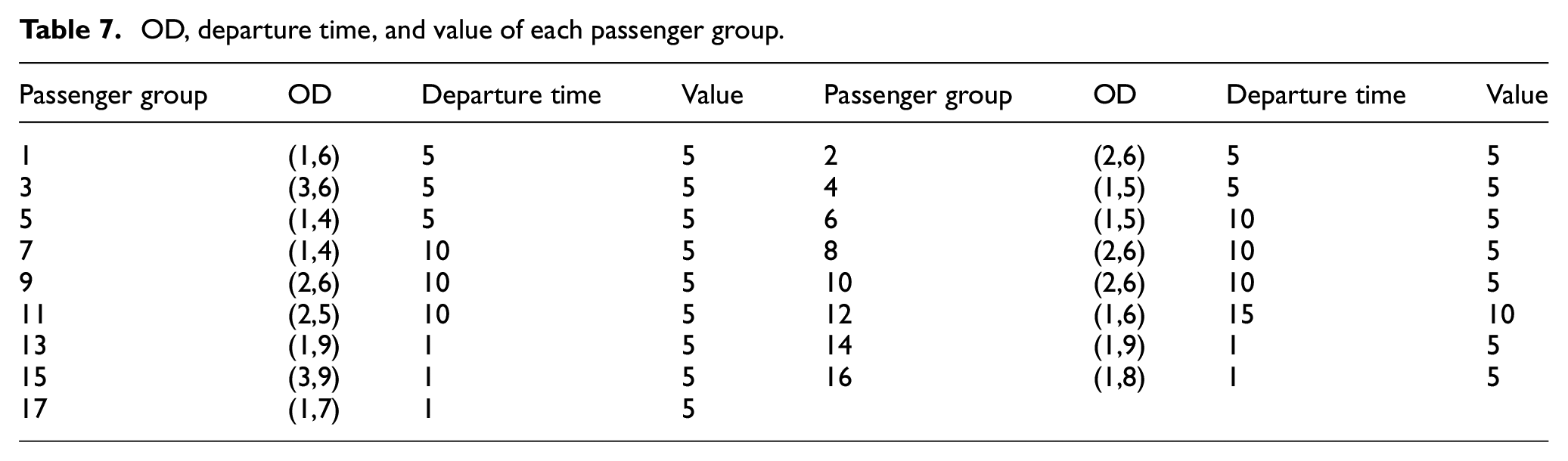
OD, departure time, and value of each passenger group.
OD and departure time of each train.

Results of simple case
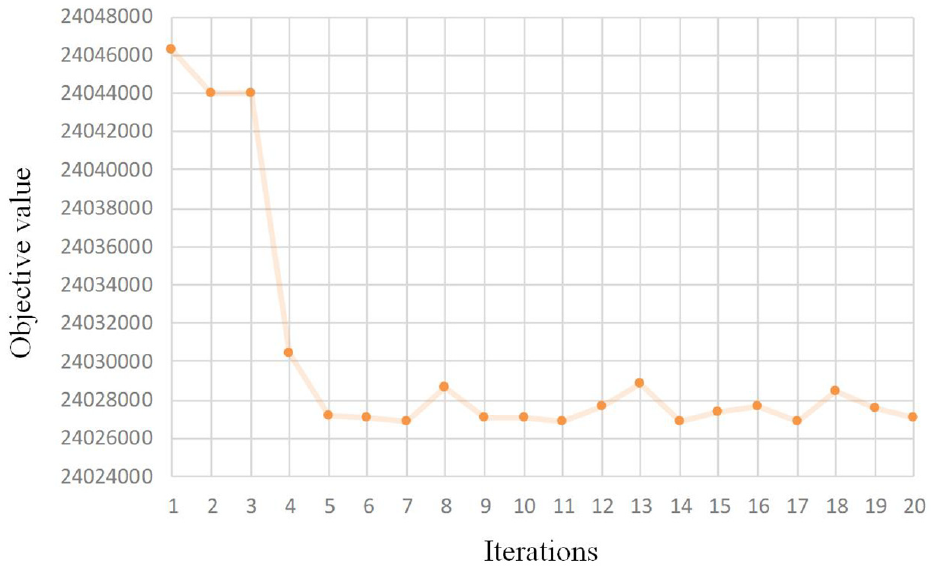
Using the input introduced, we ran the experiment on a PC (CPU: i7-7700HQ 2.80 GHZ with 8 threads, 16 GB RAM) based on the proposed model and the decomposition algorithms. The best upper bound solution was obtained within 20 iterations, and the objective value is shown in Figure 12. Subsequently, to prove the efficiency and feasibility of the proposed approach, we solved the simple case by CPLEX to obtain the optimal results. The objective value is also shown in Figure 12. The gap between the upper bound objective value and the optimal value obtained by CPLEX is 1.6%. Figure 13 displays the train timetable and stopping plan results. It can be found that some trains dwell in a station that has no loading and unloading passengers. This is because if these trains pass this station, the headway constraint will not be satisfied within a limited time horizon in the subsequent stations.
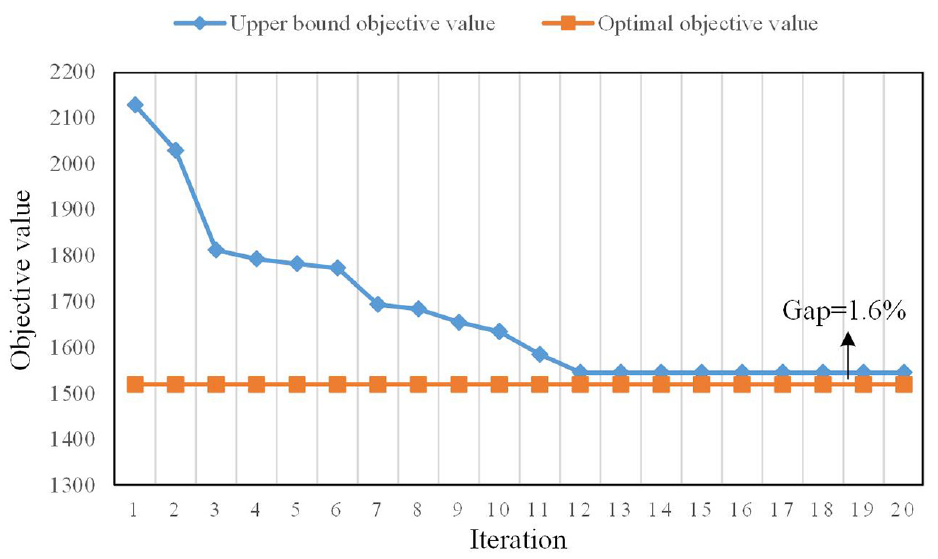
Upper bound and optimal objective values.
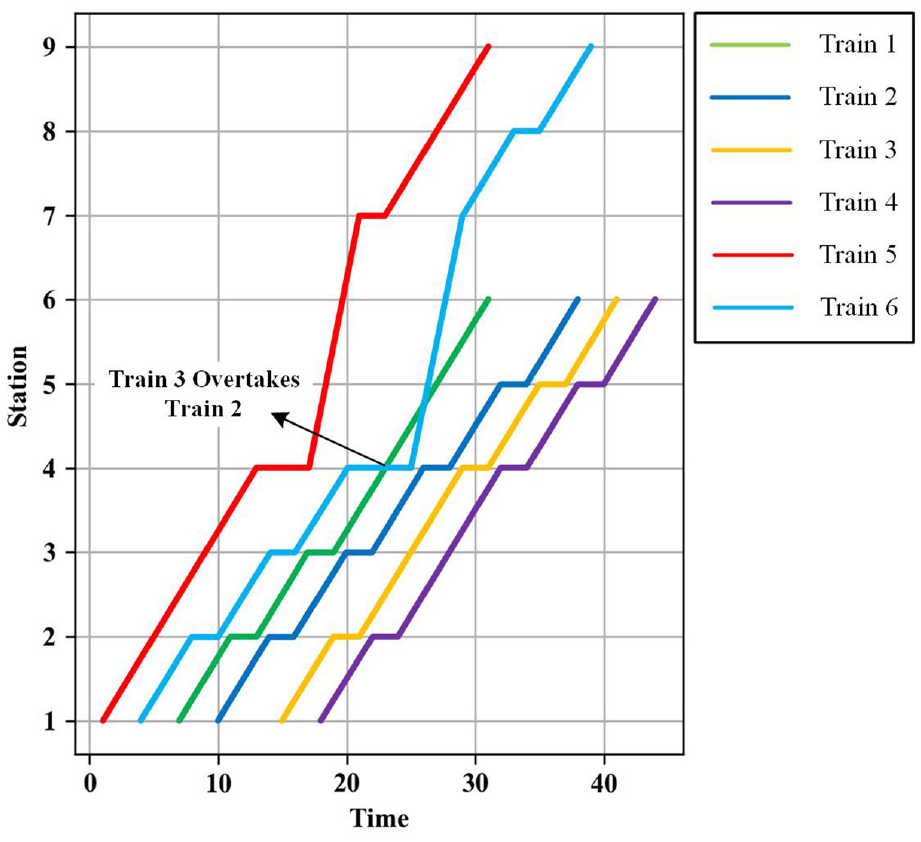
Timetable and stopping plan of simple case solved by proposed approach.
Parameter analysis between train dummy arc cost and penalty multiplier
In this study, we optimize the train timetable and stopping plan in a high-speed railway to maximize the number of scheduling trains, and the objective of the proposed model is to minimize the total travel cost. As the number of operating trains increases, some trains cannot be scheduled because of the headway constraint, and the departure and arrival times of two adjacent trains must maintain the corresponding headway. The non-operating trains should select the train dummy arcs to arrive at their destinations. Therefore, the train dummy arc cost,
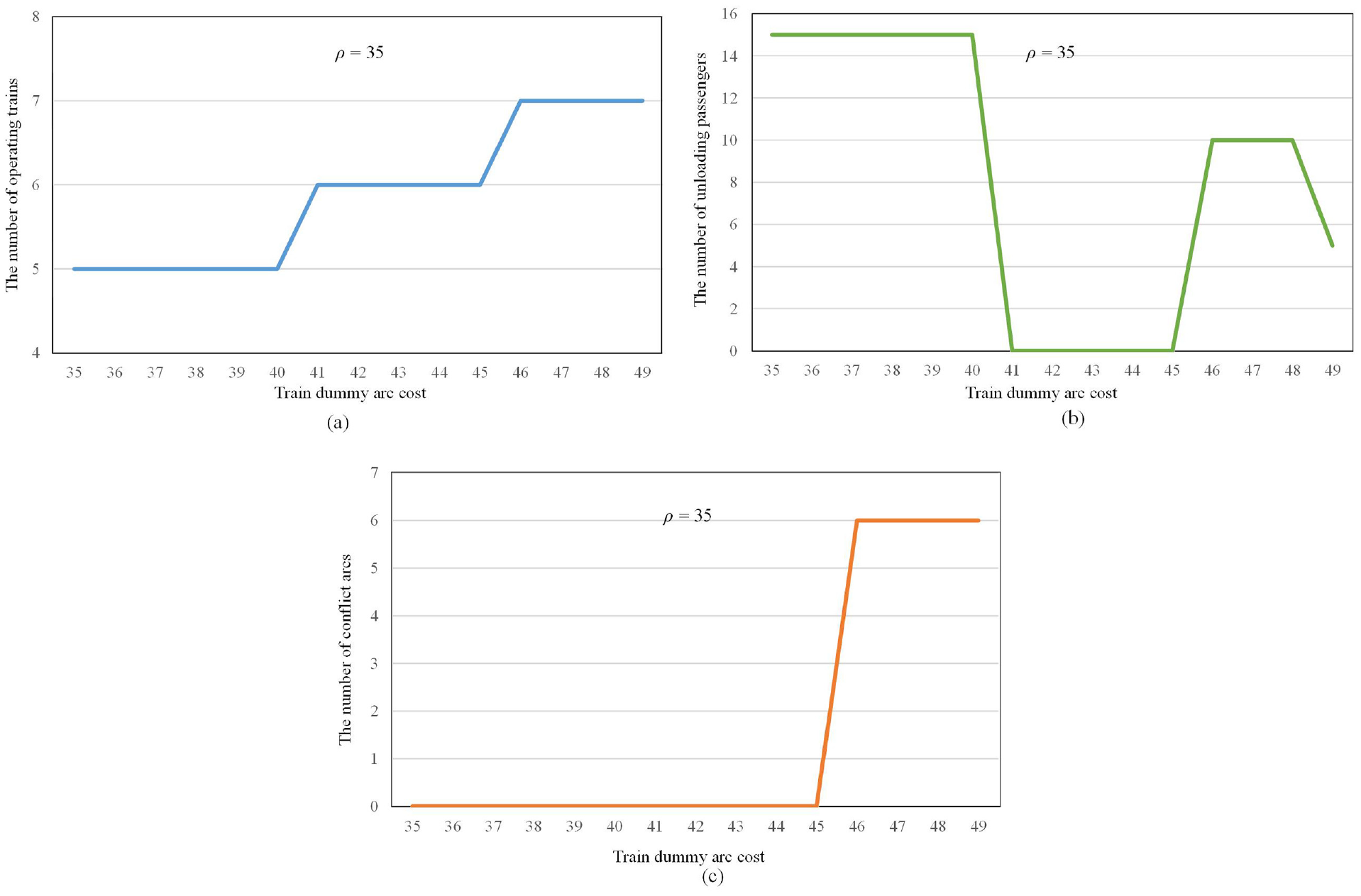
Effect of train dummy arc cost on (a) number of operating trains, (b) number of unloading passengers, and (c) number of conflict arcs.
Effect of
In the first experiment, we fix the multiplier penalty as
(1) If
(2) If
(3) If
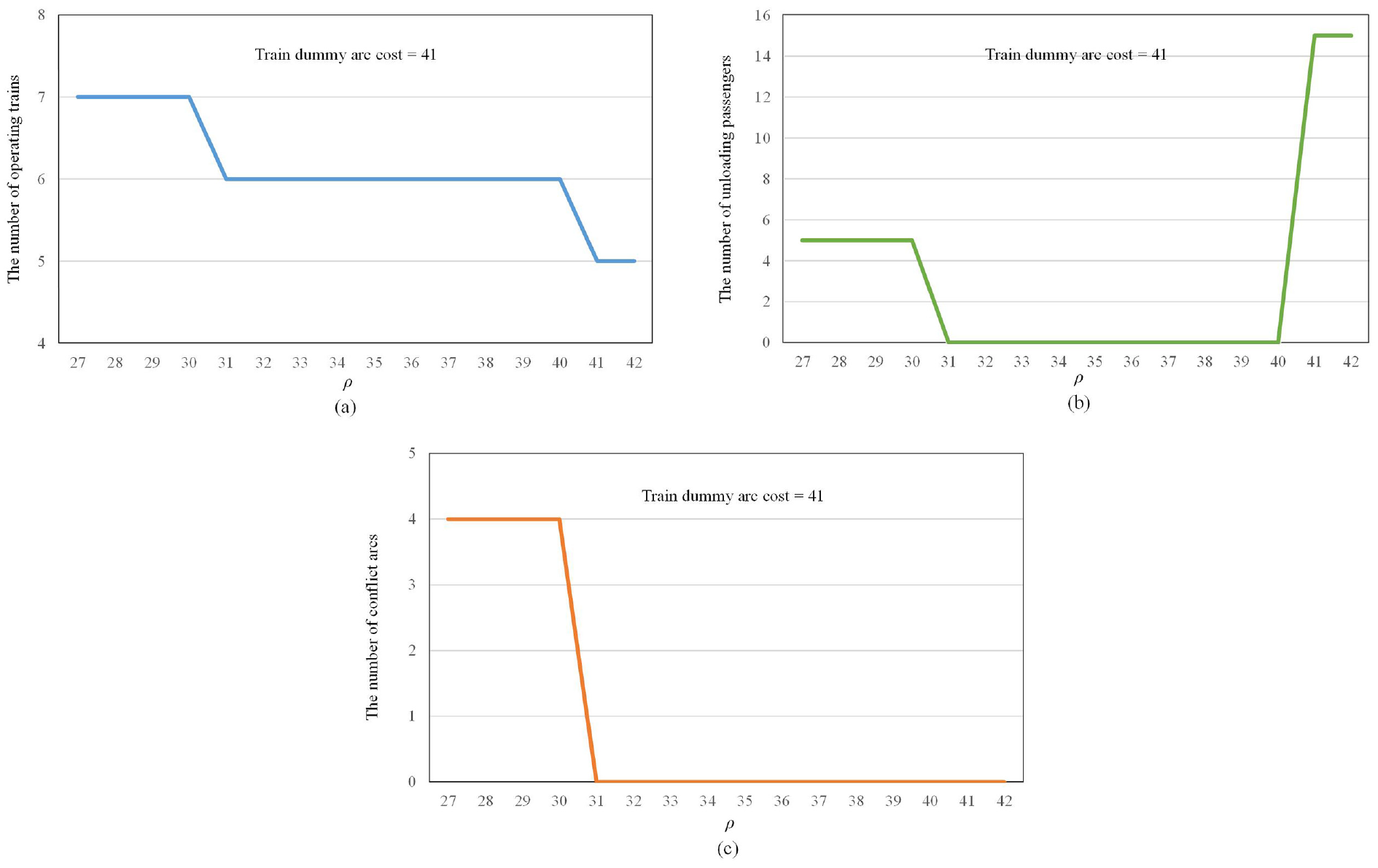
In the second experiment, we fix the train dummy arc cost as
(1) If
(2) If
(3) If
By analyzing the above experimental results, these conclusions can be summarized: (1) the passenger capacity of the train is not directly proportional to the number of trains, when the number of running trains is large enough and the penalty coefficient is large, the train will skip the predetermined stop station for meeting the train headway constraints, resulting in some passengers unable to complete the boarding and landing operation and reducing the passenger capacity of the train; (2) by setting reasonable parameters, the model and algorithm proposed in this paper can generate the train timetable and stopping plan collaboratively with time-dependent passenger flow, so as to carry more passengers with reasonable train operation quantity.
Real-world experiment based on Taiyuan–Dezhou and Zhengzhou–Beijing high-speed railways
Description
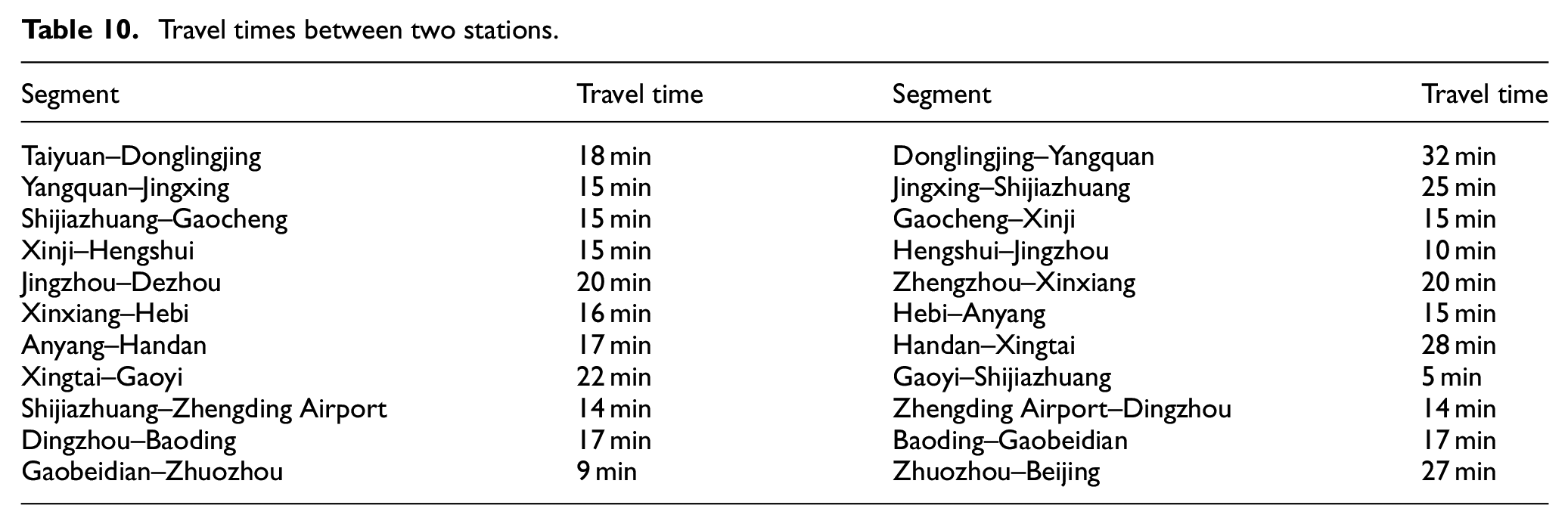
In this section, we present the results of the test of the proposed approach and analysis of the effect of cross-line operation in real-world scenarios based on the Taiyuan–Dezhou and Zhengzhou–Beijing high-speed railways, including 23 stations. The physical network of the high-speed railways is shown in Figure 16(a). The trains traveling from the Taiyuan–Dezhou railway to the Zhengzhou–Beijing railway or from the Zhengzhou–Beijing railway to the Taiyuan–Dezhou railway have a cross-line operation at the Shijiazhuang station. The layout of the Shijiazhuang station is displayed in Figure 16(b), which also presents all the train routes in each direction. The headways accordingly determined at the Shijiazhuang station are listed in Table 9. Some parameters are determined before the experiment. We only consider high-speed trains with speeds of 300 and 350 km/h, which are called as “G” trains. Therefore, we assume the travel time between two stations to be constant, which can be calculated by dividing the distance by the average speed, as listed in Table 10. The capacity of each train is set as 500. Considering that trains are easy to be scheduled in the off-peak period, we prefer to optimize the trains in the busiest period. The time horizon is set as 500 min (i.e. the time horizon of both space–time networks is 500 min) from 10:00 to 18:20, which is the busiest period, and the time interval in both space–time networks is set as 1 min. The sums of the stopping, acceleration, and deceleration times at each station are set as 4, 5, 6, 7, and 8 min, and the cross-line time is set as 8 min. The minimum headways are set as
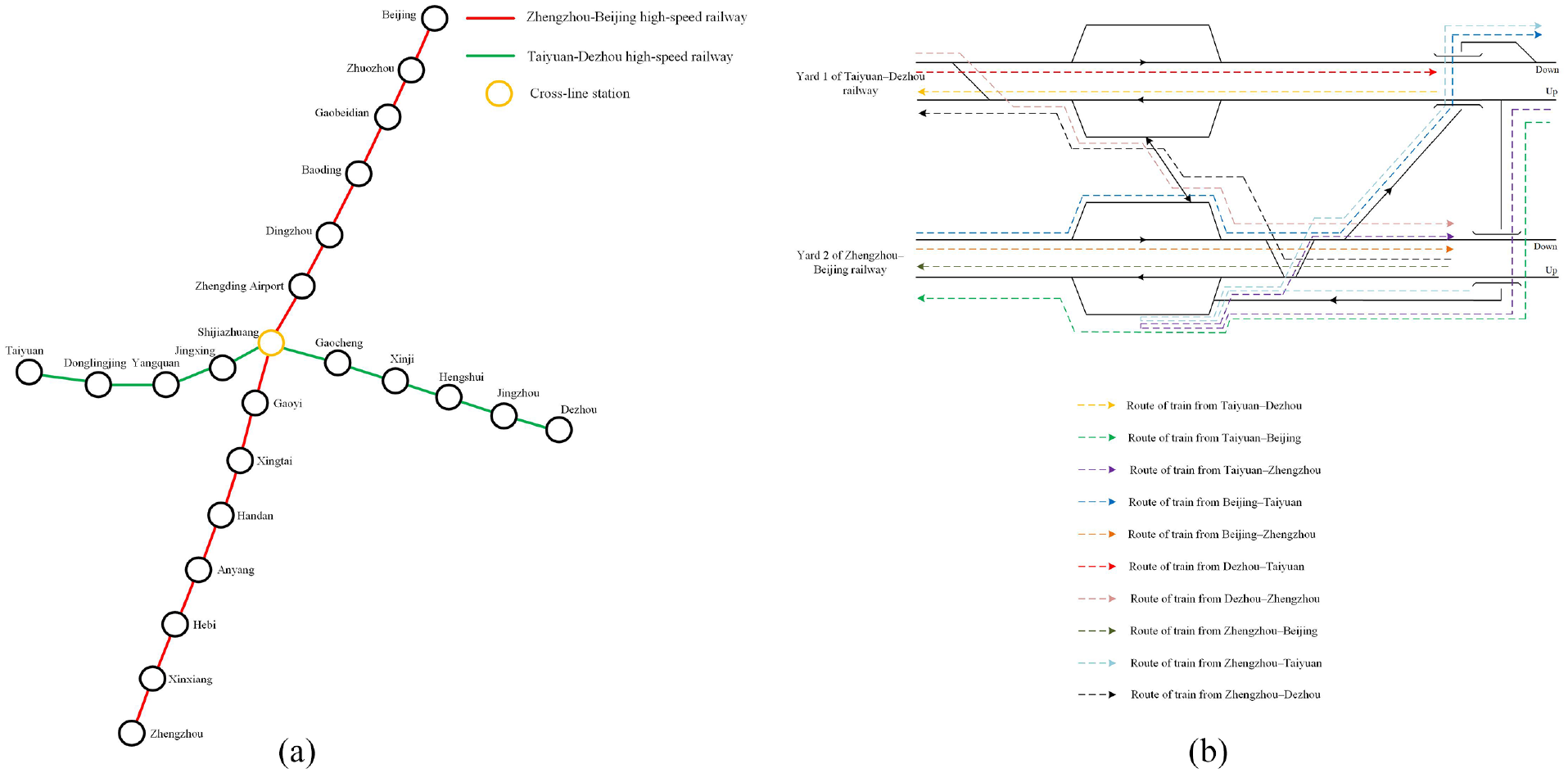
(a) Physical network of Taiyuan–Dezhou and Zhengzhou–Beijing high-speed railways and (b) Layout of Shijiazhuang station yard.
Headways between two trains in different directions.
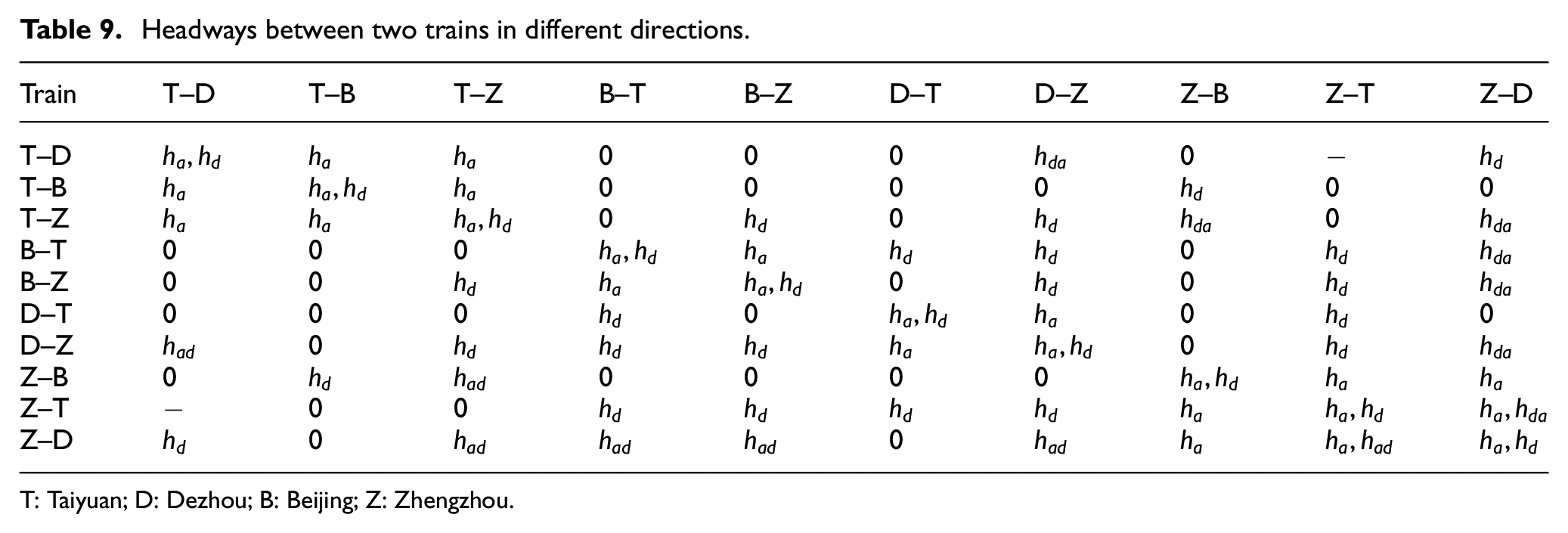
T: Taiyuan; D: Dezhou; B: Beijing; Z: Zhengzhou.
Travel times between two stations.
In the real-world experiment, we consider all the train traveling directions. The inputs of the trains are 12 trains each from Taiyuan to Dezhou, from Dezhou to Taiyuan, from Zhengzhou to Beijing, from Beijing to Zhengzhou, from Taiyuan to Beijing, from Beijing to Taiyuan, from Taiyuan to Zhengzhou, from Zhengzhou to Taiyuan, from Zhengzhou to Dezhou, and from Dezhou to Zhengzhou. Moreover, we assume that all the trains depart from the physical origin station and arrive at the physical destination station. This is because almost trains are operated as this, and because trains can be scheduled from a physical origin station to a physical destination station, they can be scheduled to depart from or finally arrive at a middle station. Accordingly, this approach can improve the universality of the results.
Results of real-world experiment
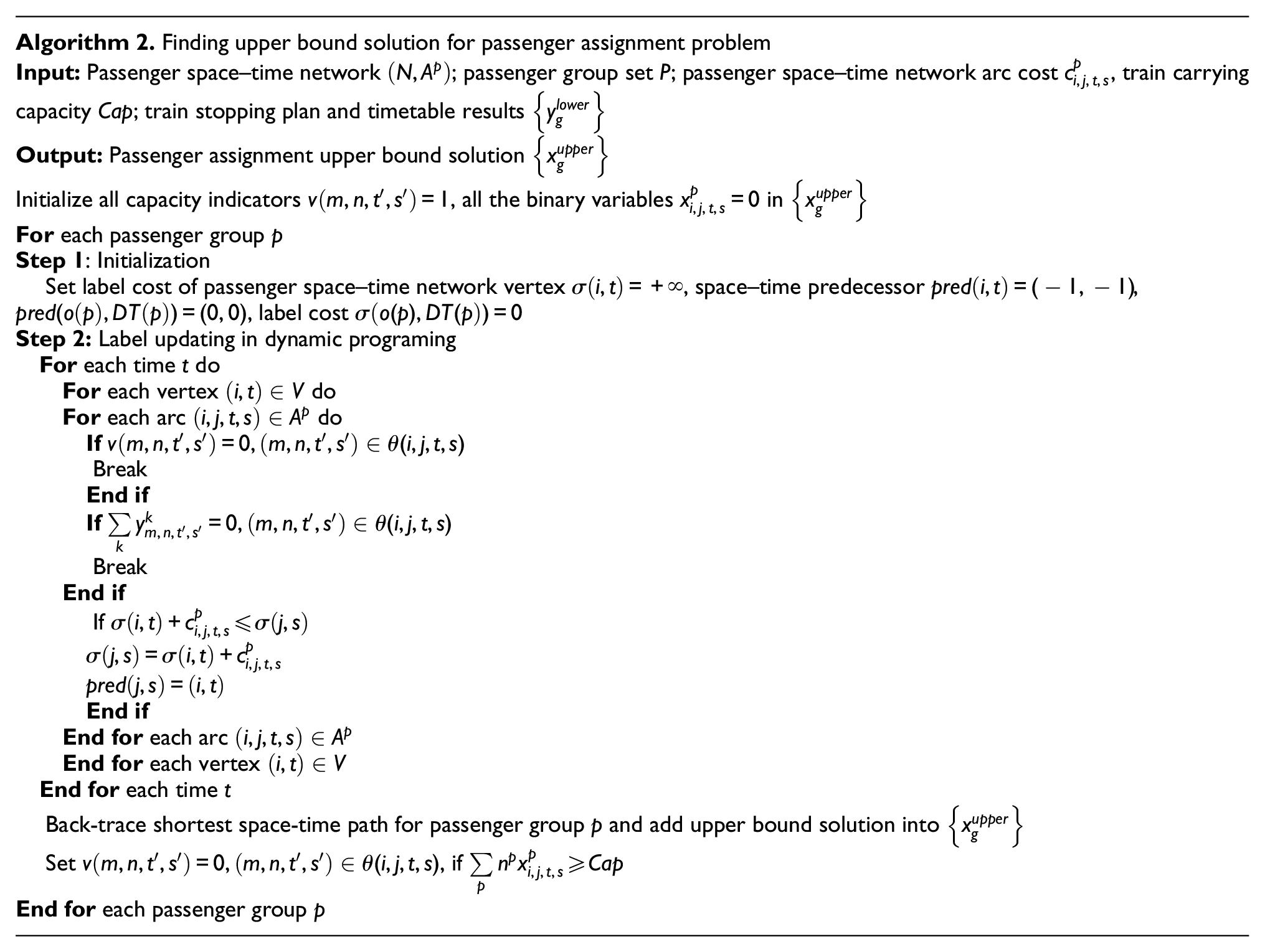
Based on the abovementioned input proposed, we test the model and algorithm on the Taiyuan–Dezhou and Zhengzhou–Beijing railways. The best and current upper bound objective values of 20 iterations are shown in Figure 17. The solving time is 6720 s. The number of conflict trains in each iteration is depicted by a dotted circle in the figure, and there are four infeasible solutions in the results. We can see that the current upper bound is stable after iteration 7, and the best upper bound is obtained at iterations 11, 16, and 18, whereas the solution at iteration 16 is infeasible. Therefore, we select the solution of iteration 11 or 18 as the final result. To evaluate the quality of the results obtained at iteration 11 or 18, the lower bound objective value of 100 iterations is shown in Figure 18. The gap between the objective value we adopted and best lower objective value is 9.12%. Therefore, it can prove that we obtain a good feasible solution.
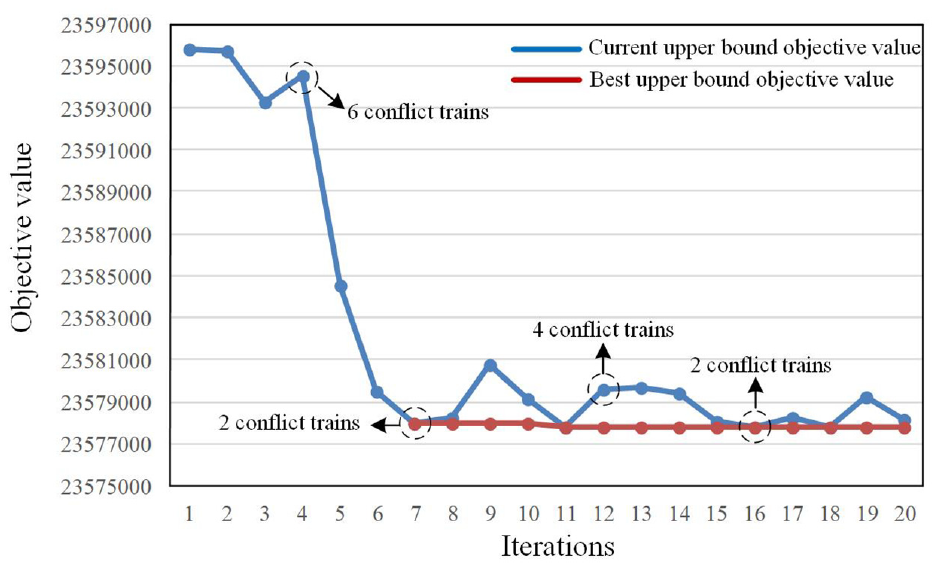
Current and best upper bound objective values within 20 iterations.
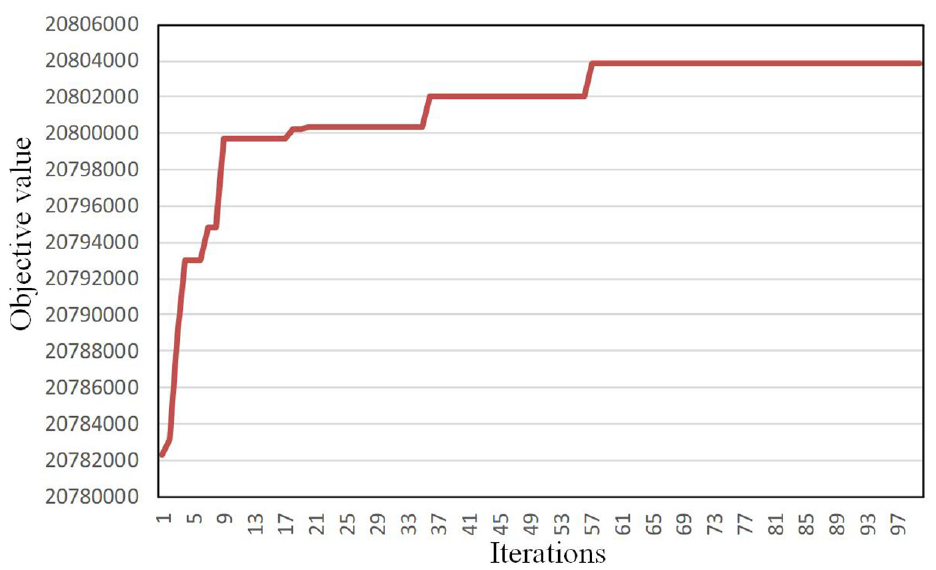
Lower bound objective value.
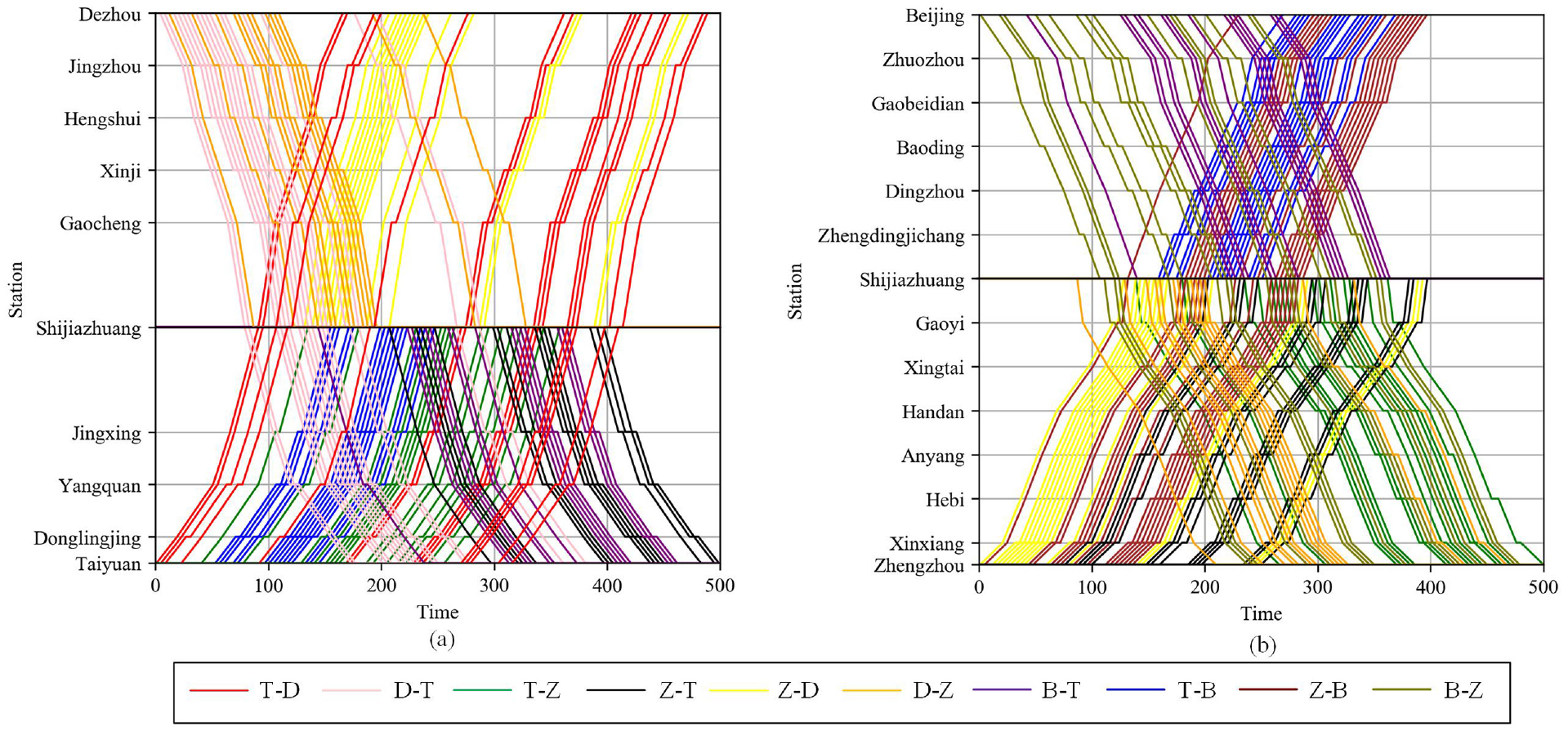
Figure 19(a) and (b) show the train timetable and stopping plan for the Taiyuan–Dezhou and Zhengzhou–Beijing high-speed railways, respectively. All the trains have no conflict with each other and all the passenger demands can be satisfied, which illustrate that the proposed approach can be used to maximize the scheduling trains and generate a high-quality train scheduling result. We find that three trains cannot be operated because of the train conflict: one train each from Taiyuan to Zhengzhou, from Zhengzhou to Dezhou, and from Zhengzhou to Taiyuan. Therefore, the trains traveling from Zhengzhou or to Zhengzhou have more disturbances by the trains in other directions. The proposed model can also evaluate the yard layout, and some disturbing points are marked as circles in Figure 19(a) and (b). The train from Taiyuan to Dezhou, which has headway
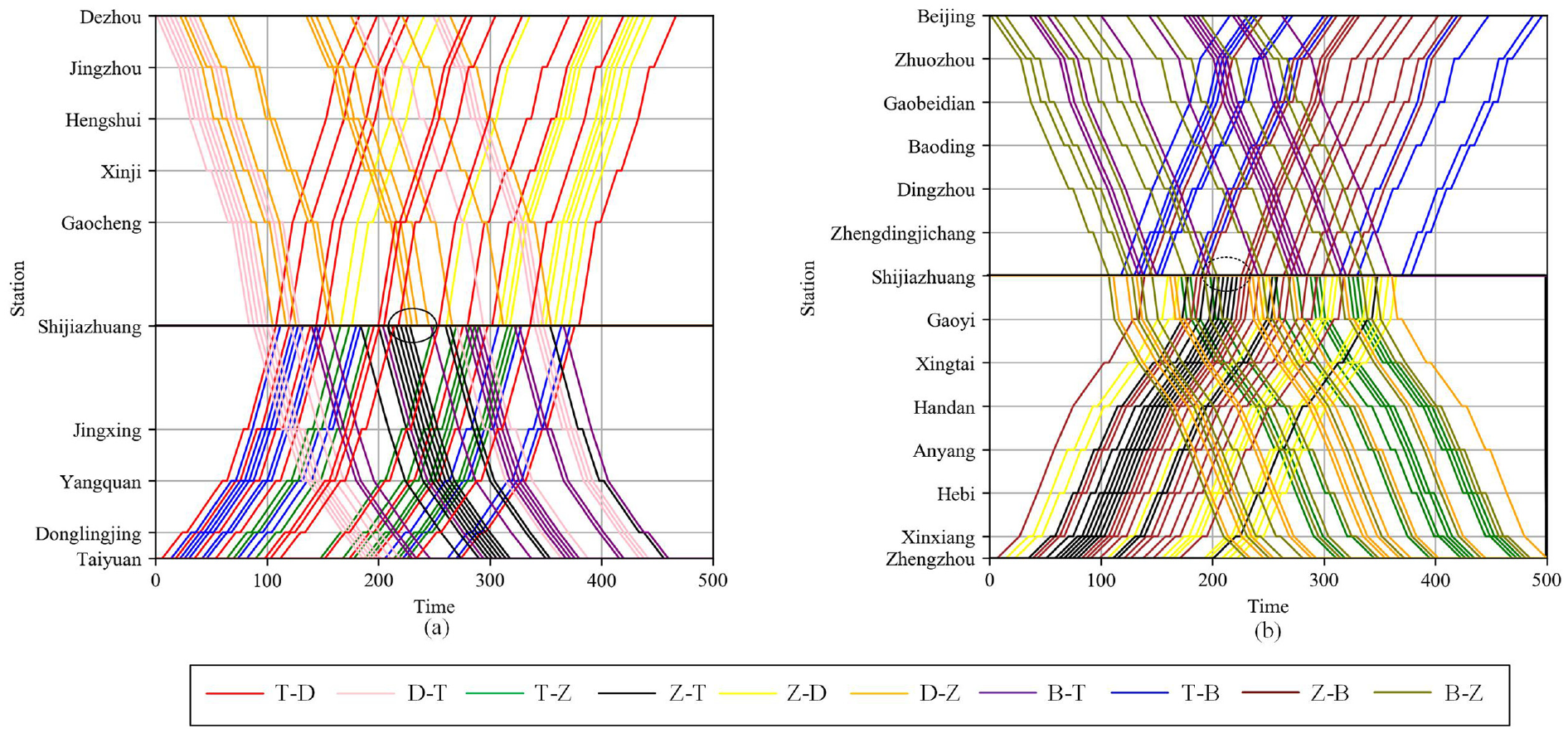
Train timetable and stopping plan for (a) Taiyuan–Dezhou and (b) Zhengzhou–Beijing high-speed railways.
Effect analysis of cross-line operation
In this section, we discuss the test conducted for the effect of the cross-line operation on the optimization results. For this purposed, an experiment without considering the cross-line operation is designed. We only consider the minimum headways between two trains arriving at and departing from the same station. The number of input trains is set as 150 (the number of trains increases from 12 to 15 in each direction), and the input of the passenger demand is the same as in the experiment described in Section 5.2.1. The upper bound objective value without considering the cross-line operation is shown in Figure 20, and the timetable and the stopping plan are displayed in Figure 21. Finally, we find that 31 more trains are scheduled when the cross-line train is not considered compared to the experiment described in Section 5.2.2, which means the capacity can improve 20.7%.
Upper bound objective value without considering cross-line operation within 20 iterations.
Train timetable and stopping plan for (a) Taiyuan–Dezhou and (b) Zhengzhou–Beijing high-speed railways without cross-line operation.
In conclusion, the cross-line operation has a significant effect on the high-speed railway capacity. As the number of cross-line trains increases, more disturbances occur at the cross-line station, leading to a decrease in the number of scheduling trains. Therefore, the number of carrying passengers decreases, and the service quality cannot be guaranteed. Accordingly, this paper provides a more practical approach to optimize the train timetable and stopping plan for carrying more passengers.
Conclusion
In this study, we optimize the train timetable and stopping plan of a high-speed railway to maximize the number of scheduling trains for mitigating the railway capacity. Cross-line operation is also considered to improve the feasibility of the result in our study. Two space–time networks, train and passenger space–time networks, are built to allow train scheduling and passenger assignment based on a physical railway network. Subsequently, an MILP model is generated to optimize the proposed problem. The objective function is reformulated to minimize the total travel cost of the trains and the passengers. To solve the model efficiently, Lagrangian relaxation-based and ADMM-based decomposition methods are adopted to relax the coupling and headway constraints, respectively. Following this, the original problem is decomposed into several shortest-path searching problems of each passenger group and train, which can be easily solved by dynamic programing.
To prove the effect and efficiency of the proposed approach, first, we test the model and the algorithm for a simple case with nine stations. The best upper bound solution is obtained within 20 iterations, and there is only a 1.6% gap relative to the optimal solution obtained by CPLEX. Furthermore, the sensitivity analyses of the train dummy arc cost and the penalty multiplier are also conducted, and the results show that the number of operating trains, number of unloading passengers, and number of conflict arcs are affected by them. Finally, we optimize the train scheduling and the passenger assignment in a real-world experiment based on the Taiyuan–Dezhou and Zhengzhou–Beijing high-speed railways. An experiment without considering the cross-line operation is designed to depict the effect of the cross-line train, and it is found that 31 trains are scheduled additionally in this case. The results show that the cross-line operation has a significant effect on the train scheduling and the passenger assignment.
In future studies, more details, such as station capacity, different train speed, and track occupation, will also be considered to improve the practicality of the model. More efficient dynamic programing will also be designed, and the ADMM-based decomposition method will be improved to relax the coupling constraint.
Footnotes
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China(U2368211), Systematic Major Research Project of China Railway (P2023X011) and Fund of China Academy of Railway Sciences (2022YJ059).
Data availability statement
All data and models that support the findings of this study are available from the corresponding author upon reasonable request.