
Abstract
Overhead cranes play a pivotal role in various industrial applications. This paper presents two methodologies for suppressing the payload’s swing and completing the accurate positioning. The original crane model is initially transformed into a chained form. Two nonlinear controllers are devised to regulate the trolley’s position and achieve the payload’s anti-swing control. The first approach utilizes backstepping, extended state observer, and filter technique to effectively estimate system state and disturbance and make the closed-loop system uniformly ultimately bounded. In contrast, the second method involves sliding mode control and finite-time disturbance observer to ensure the finite-time convergence of the resulting closed-loop system and the accurate disturbance estimation. Finally, simulation results are provided to validate the effectiveness of the proposed methods.
Keywords
Introduction
Recently, researchers have given significant attention to the development and application of underactuated systems, leading to important advancements in the field of automatic control.1–11 Underactuated systems, which have less independent control inputs than their degrees of freedom, offer advantages like simplicity in structure, low energy consumption, and operational flexibility. Moreover, underactuated systems have numerous critical applications in real-life scenarios, including mobile robots, aerospace vehicles, cranes, inverted pendulums, and so on.1–7 As a vital transportation tool, overhead cranes confront numerous control challenges. One major research challenge is to achieve precise positioning and oscillation suppression during the motion of trolley, especially when subjected to external disturbances.8–11 Consequently, many researchers have dedicated their efforts to the automatic control of overhead cranes,12–25 not only to improve the efficiency and safety but also to enhance the control capabilities and promote the utilization.
However, due to the characteristics of underactuated system, most conventional control techniques are no longer relevant for overhead cranes. The progress of industrial technology and the improvement of technical requirements have compelled researchers to develop more complex control strategies.16–25 A significant portion of previous studies has focused on the regulation control of overhead cranes using optimal control,16,17 trajectory planning control,18,19 input shaping control,20,21 feedback linearization control.22,23 Moreover, recent years have witnessed the development of numerous innovative and effective control strategies. For instance, in Sun et al., 24 a novel amplitude-saturated output feedback control approach was proposed to achieve the improved performance while considering practical saturation constraints. Additionally, an enhanced-coupling adaptive controller was designed by incorporating more swing information to enhance the swing suppression performance and robustness. 25
In practical applications, overhead cranes are deeply affected by parameter uncertainty and unknown disturbances.26–30 Thus, it becomes very important to select and design suitable anti-disturbance control strategies.31–40 On the other hand, active anti-disturbance techniques mainly use disturbance observers to actively estimate and compensate for the existing disturbances, such as extended state observers (ESO), finite-time disturbance observers (FTDO), etc. A practical adaptive tracking controller was proposed without velocity measurements by working in conjunction with ESO32,33 developed a robust tracking controller for a class of uncertain nonlinear systems with unknown external perturbations and system uncertainties by using backstepping technique and disturbance observer. Based on a disturbance observer, 34 designed an adaptive tracking controller for a saturated uncertain nonlinear system. In addition, the sliding mode control methods were respectively proposed for overhead cranes in Wu et al. 35 and Zhang et al. 36 to achieve the rapid and accurate disturbance rejection by combining an FTDO. 37 proposed an optimized backstepping controller for tower cranes based on a fixed-time disturbance observer.
Building on previous work, this paper proposes two anti-disturbance control methods for overhead cranes that effectively handle disturbances. To aid the controller design, the original dynamic model is transformed into a chained structure using a mathematical technique. 35 Treating the external disturbance as an extended state, the first anti-disturbance controller is proposed by using backstepping method with ESO technique and filter approach. 37 Meanwhile, the sliding mode control method is employed in conjunction with FTDO to design the second anti-disturbance controller, guaranteeing the finite-time convergence of the closed-loop system. The stability of a closed-loop system is eventually deduced from the theoretical analysis of both proposed methods. The suggested controllers’ effectiveness and robustness are then demonstrated through simulation results. In summary, the proposed control methods’ contribution are ascertained as follows:
In this article, two anti-disturbance control methods are provided for underactuated overhead cranes. Based on an ESO, the first suggested anti-disturbance method can estimate both the system states and the external disturbance. The second anti-disturbance approach with an FTDO can estimate the external disturbance exactly within a finite time.
The first anti-disturbance controller employs backstepping design approach with filter technique to prevent the differential explosion issue and attains the positioning and anti-swing control asymptotically. The second anti-disturbance controller can satisfy the requirement for finite-time convergence, improving the control performance and system stability rapidly.
The feasibility and robustness of the suggested controllers against external disturbance are supported by simulation tests.
The remainder of this paper is organized as follows. In Section “Problem formulation,” the crane system is briefly introduced and the control problem is formulated. Section “Backstepping controller with ESO design and analysis” provides the backstepping controller design with ESO. Section “Sliding mode controller with FTDO design and analysis” provides the sliding mode controller design with FTDO. Simulation results are given in Section “Simulation results.” Finally, Section “Conclusion” summarizes the main work of this paper and discusses our future work.
Notations: In this paper,
Problem formulation
The dynamic model of the considered underactuated overhead crane system (Figure 1) is expressed as35,36


where
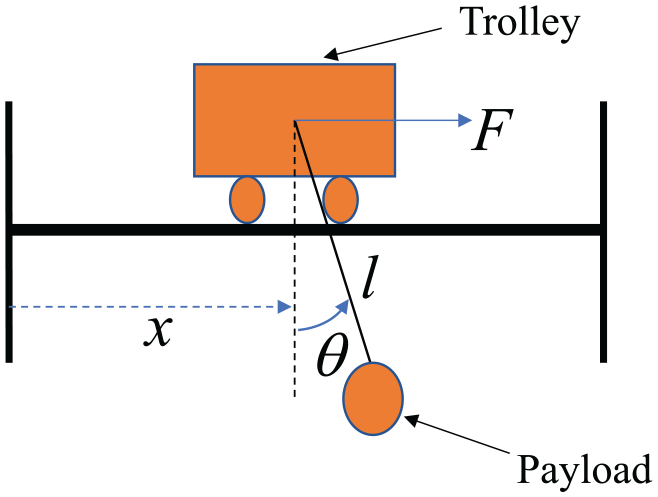
Schematic illustration of a 2-D overhead crane system.
After some mathematical arrangements, one can rearrange it as


where
The control goal for the overhead crane system is to move the trolley to the appropriate position while also removing the payload swing, that is

where
In order to form a chained structure, the following auxiliary variables are introduced as 35
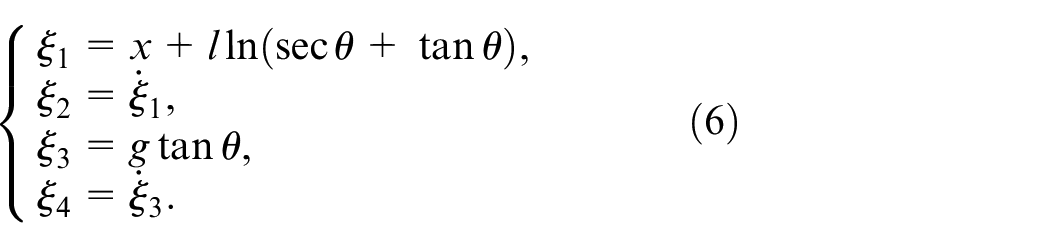
Then, based on (6), one can obtain the following dynamic equations
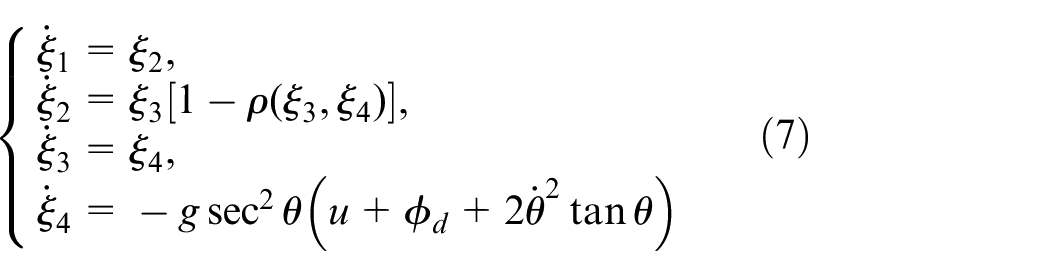
where

Moreover, after some mathematical arrangements, one has that

According to
As a result, the original control goal stated above, namely,
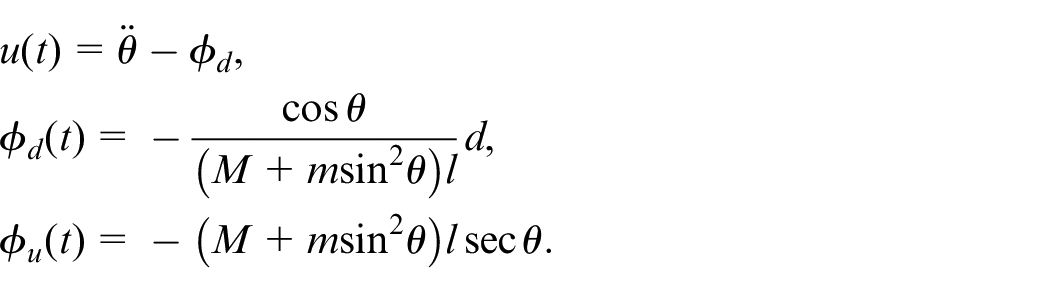
For convenience, one defines

In order to simplify the control system design, it is necessary to make some general assumptions as follows
Backstepping controller with ESO design and analysis
In this section, we propose a backstepping control scheme that utilizes a constructed extended state observer, aiming to enhance the robustness. Furthermore, we employ a nonlinear one-order filter to address the issue of differential explosion and simplify the computation.
ESO design and analysis
Introduce
In view of the structure of system (9), the ESO is introduced as
where
Combining (9) and (10), the estimation error system becomes
where

where
which is assumed to be Hurwitz.
Backstepping controller design and analysis
To carry out the control design, some auxiliary transformations are chosen as

where

where


where

Then, the virtual control law

where
where the term

The derivative of
The virtual control law

where
where the term

The time derivative of

Ultimately, the real control input

Substituting (26) into (25), we generate the result that
Note that

where
(a) all signals of the closed-loop system are uniformly ultimately bounded (UUB);
(b) system output state
By combing the results in (28) and (30), one has
where

which implies that
Sliding mode controller with FTDO design and analysis
In this section, based on a specifically designed finite-time disturbance observer, a sliding mode control approach is proposed to ensure the finite-time convergence of system states. Moreover, this method not only accurately estimates the external perturbation, but also rapidly improves the system control performance. For the coming controller development, some new variables are introduced as

So the dynamic equation (8) can be rewritten as
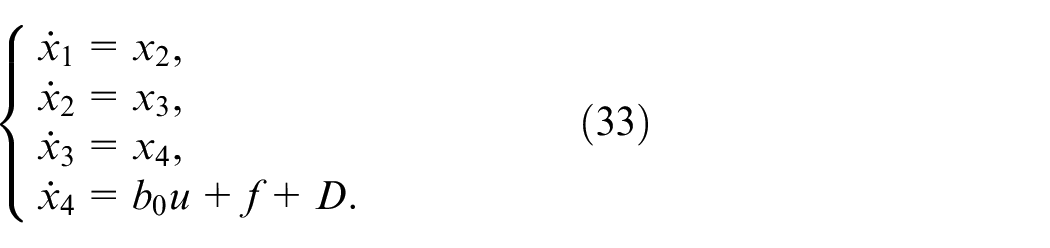
For system (33), the control objective is equivalently transformed into
Disturbance observer design
To enhance the system robustness and achieve the swift and precise disturbance estimation, it is recommended to use the FTDO. As motivated by Borkar and Patil, 39 an FTDO is introduced as
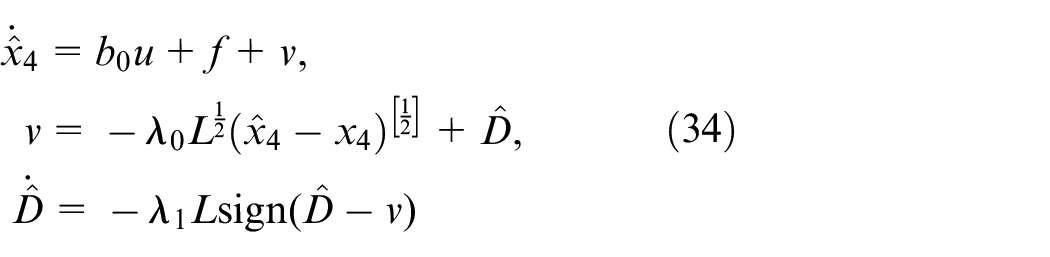
where

Control law design and stability analysis
A sliding mode manifold 40 for dynamics (33) is designed as

where

is Hurwitz. The fractional powers

where



where


Taking the time derivative of (42) yields that

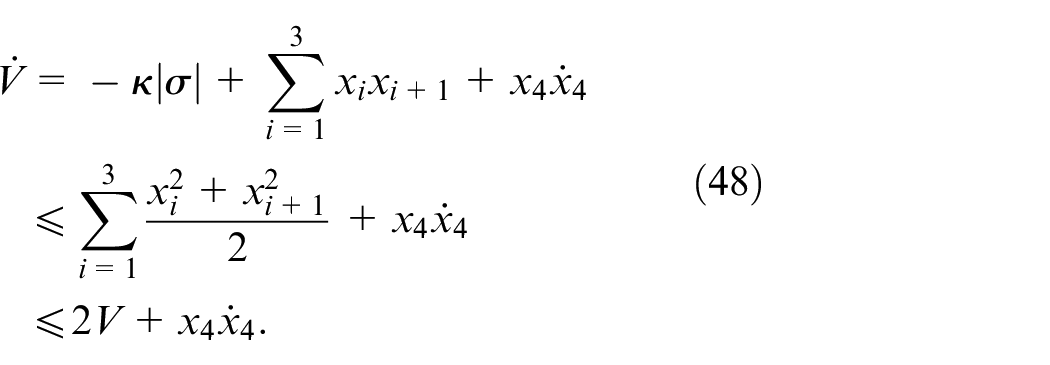
Now, a candidate Lyapunov function is considered as

whose derivative

Hence,

Next, another candidate Lyapunov function

Differentiating
With estimation error (35) in mind, combining (33) and (36), one has
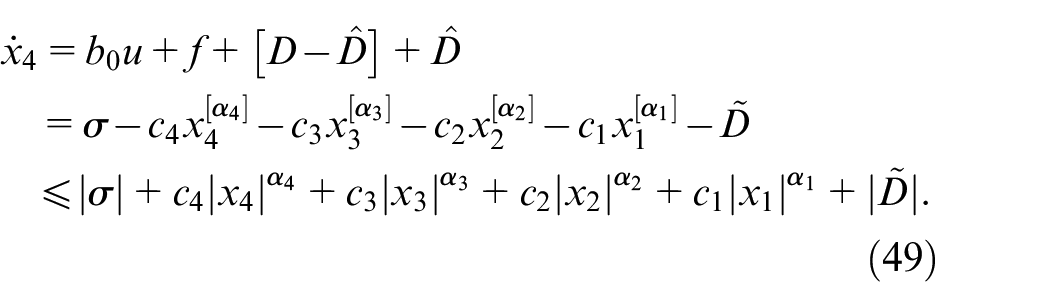
Note that for parameters

Substituting (50) into (49) leads to

which is substituted into (48) to obtain
The above inequality can be written in the following compact form

with


Since
Since the sliding surface

and defining

it can be claimed that when

Based on the conclusion that state variables of the closed-loop system are convergent within a finite time, in the sense that

that is

Hence, the proof of this theorem is completed.
Simulation results
In this section, we provide numerical results that validate the superior functioning of the two proposed approaches. The simulation outcomes demonstrate the remarkable resistance to disturbances of the two controllers when compared to current methods. Furthermore, the system parameters are set as
Comparative results of the first method
In this subsection, a comparison is made between the first proposed control technique and existing control methods to demonstrate superior performance. First, we have selected the following reference trajectory as the desired input

where
wherein
wherein
The physical parameters are chosen as
The simulation results in Figures 2 and 3 provide a comprehensive evaluation of the first control method’s performance. As shown in Figure 2, we can see that the state
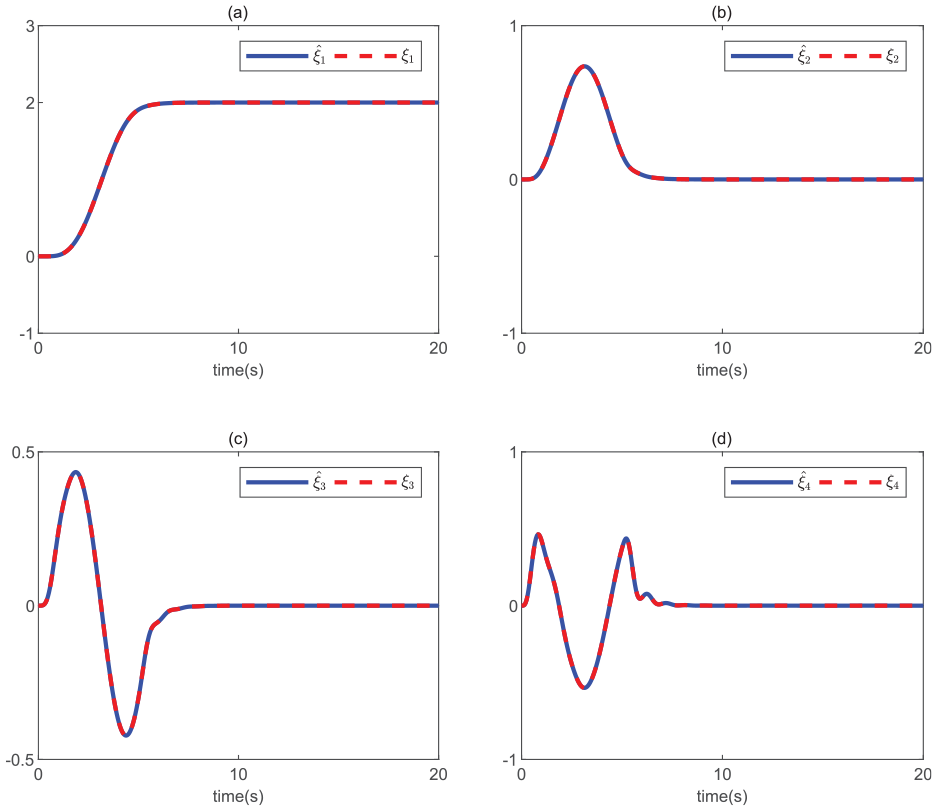
Time responses of ESO.
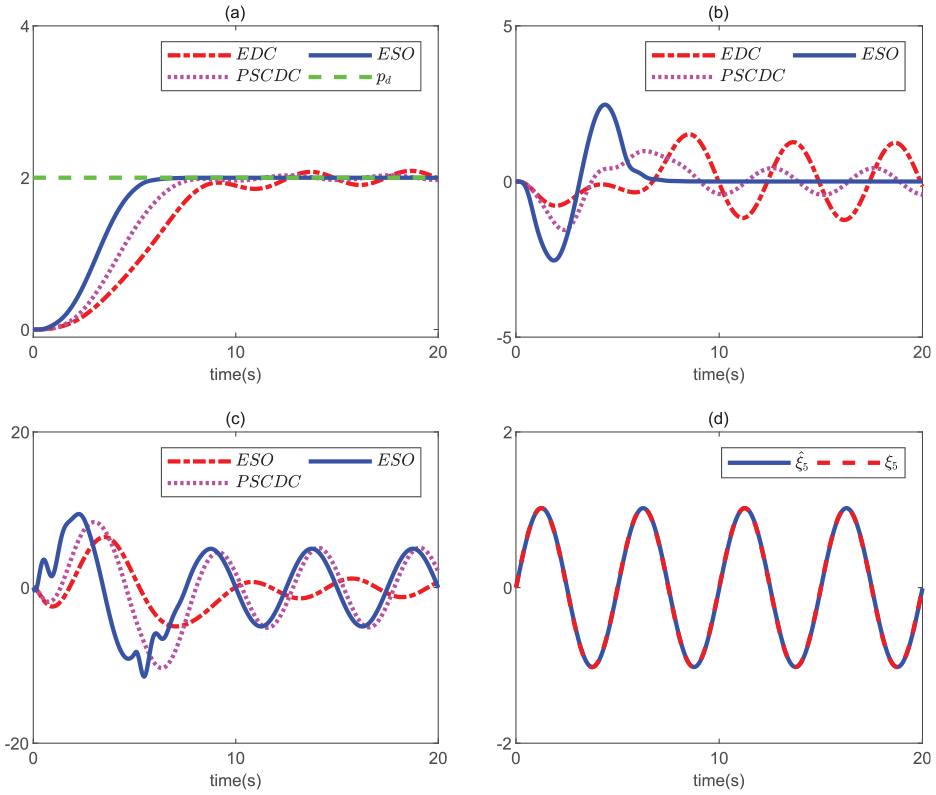
Time responses of ESO-based backstepping control method: trolley position, payload swing, control input, and matched disturbance.
Comparative results of the second method
In this subsection, we do some optimization based on the DOB method in Wu et al.
35
and show the effectiveness and robustness of the second method. The associated control variables are configured as
Simulation results are presented in Figure 4, which provides valuable insights into the performance of the second proposed method. After a careful look at Figure 4, we can see that the trolley can follow the reference trajectory precisely and the swing angle is also suppressed into a small range of 3 degrees, which is less than the DOB method. Additionally, no residual cargo swing is seen after the trolley stops. The control input
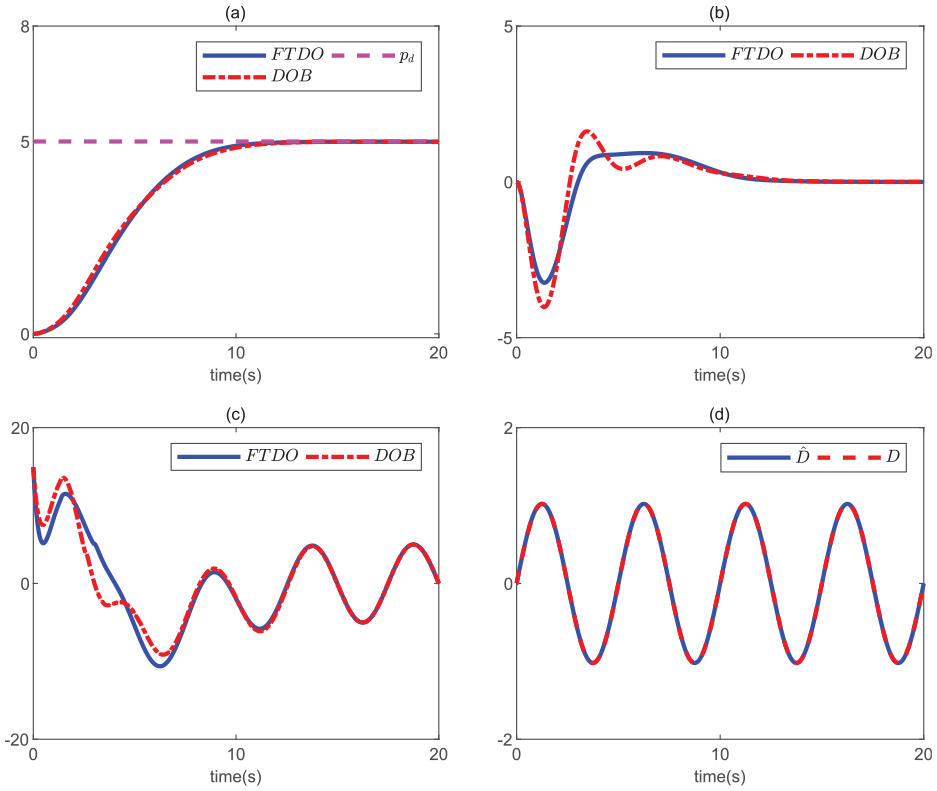
Time responses of FTDO-based sliding mode control method: trolley position, payload swing, control input, and matched disturbance.
Conclusion
This paper presents two distinct methods for mitigating sway motions and enhancing stability for overhead cranes. The first approach involves the development of an extended state observer that treats disturbances as part of the state. When combined with backstepping control and filter techniques, this approach effectively reduces sway and enhances stability. The second method proposes a sliding mode controller with a finite-time disturbance observer, which ensures the finite-time convergence of the closed-loop system and enables accurate estimation of the disturbance within a finite time. Furthermore, the anti-disturbance capability of both methods is supported by theoretical analysis. Finally, simulation results demonstrate that the proposed control methods exhibit superior effectiveness and robustness compared to existing control methods.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partly supported by the National Natural Science Foundation of China (62173207), the China Postdoctoral Science Special Foundation (2023T160334), the Youth Innovation Team Project of Colleges and Universities in Shandong Province (2022KJ176), and the Graduate Teaching Case Base Project of Shandong Province (SDYAL20109). The National Key Research and Development Program of China (2021YFE0193900).
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.