
Abstract
For fractional order systems with colored process noise, the discretization fractional order system model is used to construct the augmented vector defined by the state vector and colored process noise vector. Based on the augmented equation of fractional order systems, the robust local Kalman filtering algorithm for fractional order systems with colored process noise is derived. The matrix weighted fusion, weighted measurement fusion and centralized fusion methods were used to fuse and estimate the state of multi-sensor fractional order system. Simulation results show the effectiveness of the proposed algorithm.
Introduction
Fractional calculus was first proposed by Lopida and Leibniz in 1695, 1 but the systematic study of fractional calculus was not completed until the early to mid-19th century. Since 1974, fractional calculus theory and its applications have gradually flourished. Due to the applications in mathematics, 2 describing the evolution of material mechanical properties, 3 and studying non Newtonian fluids, 4 fractional calculus has received increasing attention from experts and scholars. In recent years, fractional calculus has been applied in many fields such as chaotic oscillations,5,6 control systems, 7 diffusion transport theory, 8 and viscoelastic mechanics. 9 The main advantage of fractional calculus in the field of control research lies in the memory of fractional order operators, which enable them to be more closely related to actual systems than the motion characteristics described by integer orders. With the continuous deepening of research on the theory and application of fractional order control, the traditional field of integer order system control has gradually been replaced by fractional order system control. In fields such as viscoelastic systems, the dynamic characteristics and robustness obtained by using fractional order controllers 10 are better than those obtained by using traditional integer order control systems. 11
Due to the need for state estimation in analyzing systems and designing controllers, 12 and the sampling signals of the input and output states of actual control systems are often affected by various uncertain factors in the system. It is necessary to design filters to estimate the state information of systems. 13 The Kalman filtering method is a state estimation algorithm that was first proposed by R E. Kalman. It is a most widely used filtering theory for state estimation, 14 which is based on projection theory. The Kalman filter provides a convenient framework for detecting anomalies in data fluctuations, as well as estimating the expected value and variance of the next observation, which can be used to determine whether the observation is abnormal. The initial design purpose of Kalman filtering was for target tracking, mainly estimating the motion state of the target. The Kalman filtering algorithm based on linear discrete systems can not only be run by computers, but also has fast response speed and good filtering effect. It does not need to store a large amount of data and has good results in practical applications such as ship measurement, 15 airship model calculation, 16 and power system relay protection. 17 However, traditional single sensor Kalman filtering systems are difficult to improve the accuracy of state estimation. To solve this problem, many multi-sensor fusion Kalman filtering systems with different application backgrounds have been designed.
Multi sensor information fusion has been widely used in many fields such as unmanned systems, 18 the internet of things, 19 and the design of motors and appliances. 20 After multi-sensor fusion, the estimation accuracy is higher. The algorithm is simpler, and the application is more convenient. Centralized fusion and weighted fusion are two basic information fusion methods. Centralized fusion is globally optimal in the sense of linear unbiased minimum variance estimation. 21 Due to the fact that each sensor’s data needs to be transmitted to the fusion center for processing, its computational burden also increases, and its fault tolerance is poor, making it inconvenient to implement. Therefore, weighted fusion methods are more convenient and feasible for applications. Matrix weighted fusion first processes the observation data of sensors to obtain local estimates, and then fuses the estimated values, which can reduce the computational burden and facilitate timely fault detection. Weighted measurement fusion algorithm applying the fused measurement to estimate the state, which is equivalent to the centralized fusion algorithm. 14
In the practical application of distributed fusion Kalman filtering, many system models have various uncertain noise interferences, and the results obtained after being disturbed during Kalman filtering estimation are likely to diverge, making filtering estimation more difficult. This has promoted the development of robust Kalman filters. 22 For Kalman filters, robustness refers to the characteristic of minimizing or not changing the performance risk of the filter in all possible uncertain situations. 23 Usually, the research on systems with robustness is mostly integer order. In fact, many systems have fractional order characteristics due to different materials and other reasons. 24 The reason for ignoring fractional order systems is that they are relatively complex and lack corresponding mathematical tools. In recent years, relevant scholars have gradually overcome these difficulties in pursuit of more optimized control and begun to study fractional order control systems. In Ref., 25 robust H-infinity control for fractional-order switched systems (FOSSs) with uncertainty was studied. Ref. 26 presented a robust adaptive fractional order proportional integral derivative controller for a class of uncertain fractional order nonlinear systems using fractional order sliding mode control. A robust second-order feedback PD type iterative learning control (ILC) was presented for a class of uncertain fractional-order singular systems in Ref. 27 Ref. 28 studied the robust adaptive control of fractional-order chaotic systems with system uncertainties and bounded external disturbances. Due to its wider applicability compared to classical Kalman filtering algorithms, robust Kalman filtering algorithms have great research value in the field of fractional order systems. However, there are relatively few research results on applying robust fractional order Kalman filtering algorithms to multi-sensor fusion.
This paper will study the robust fusion Kalman filter estimation for multi-sensor fractional order systems with uncertain noise variance. Firstly, a local robust Kalman filtering algorithm is proposed for fractional order systems. Moreover, the multi-sensor information fusion is performed on robust fractional order systems through matrix weighted fusion, weighted measurement fusion and centralized fusion methods. Effective algorithms are proposed to solve the problem of robust fusion estimation for multi-sensor fractional order systems.
Problem formulation
Due to the need for Kalman filtering estimation of linear discrete fractional order systems in this paper, it is necessary to discretize and linearize continuous and nonlinear fractional order systems to obtain linear discrete fractional order systems. At present, there are three main forms of fractional order operators: Caputo definition, Riemann-Liouville (R-L) definition, and
Consider the multisensor linear discrete fractional order system with colored noise and uncertain noise variances based on G-L difference definition 29


where
where
Robust fusion Kalman filter for fractional order systems with colored process noise
Model conversion

and

where

with

It satisfies

then we have

with
The purpose of this paper is to design a local and weighted fusion robust fractional order Kalman filter

Define augmented state vector

The augmented state equation is given as follows
Organizing and obtaining
where

The measurement equation is

Organizing and obtaining it yields

with
At this point, the fractional order system (1) and (3) with colored process noise is transformed into a fractional order system (15) and (18) with uncorrelated white noise, and standard Kalman filtering can be applied to the system.
Local robust Kalman filter
The following theorem applies standard Kalman filters to the system (15) and (18).




with the initial values



where
Furthermore, applying (19) yields
Substituting it into (21), we can obtain
Substituting (29) into (31), it follows that
After sorting, we have
where
Based on the above equation, it can be concluded that the minimum upper bound of
Weighted fusion and centralized fusion robust Kalman filters


Define the

where the

The filtering error covariance matrix

The optimal fusion error variance matrix is





and
Assuming that the subsystems of each sensor are uniformly completely observable and uniformly completely controllable, we define




Applying the centralized fusion method, we have the centralized fusion measurement equation

with
Under Assumptions 1–3, weighting local measurements yields to a dimensionality reduced measurement equation

where








with the initial values



where




with the initial values



and
Simulation analysis
When studying fractional order noise recognition and its application in temperature sensor data, 31 colored noise in the system should be considered. Augmenting the system state with colored noise can effectively solve the problem of colored noise in fractional order systems. In the practical application of fractional order system models, uncertainty widely exists, and needs to be considered in practical applications such as estimating the state of charge of batteries, 32 intelligent transportation, 33 and grid connected commutation systems. 34 The use of robust analysis methods can effectively solve the problem of uncertainty in fractional order systems.
Now considering discrete-time linear fractional order robust systems with colored process noise

where
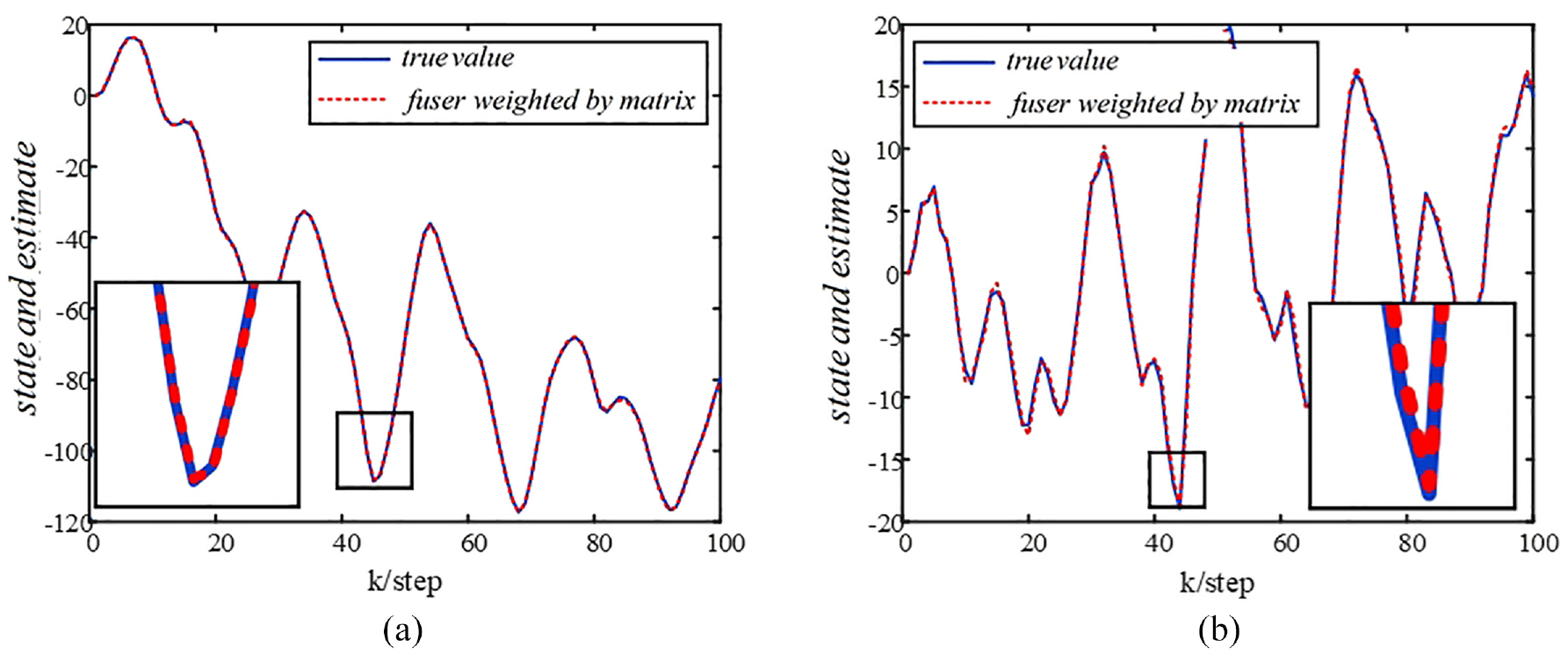
comparison curve between the real value
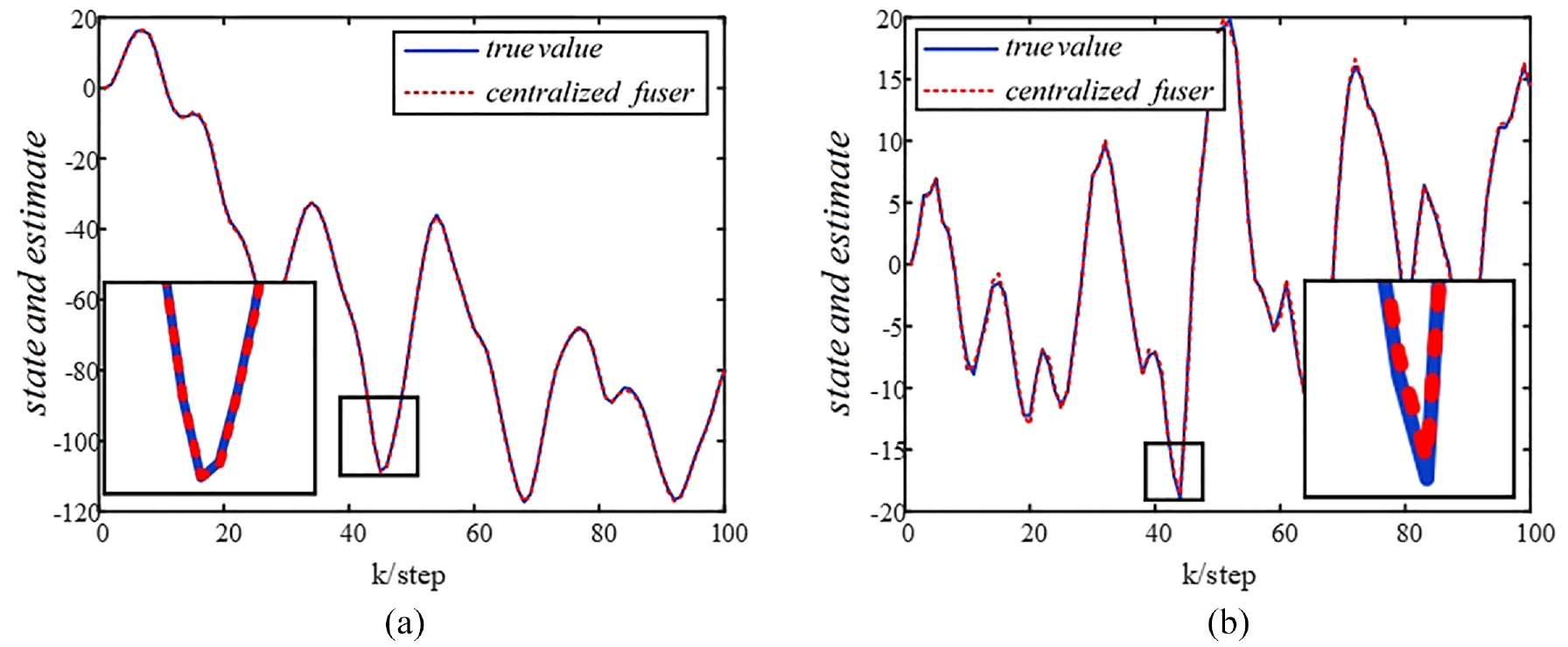
comparison curve of real value
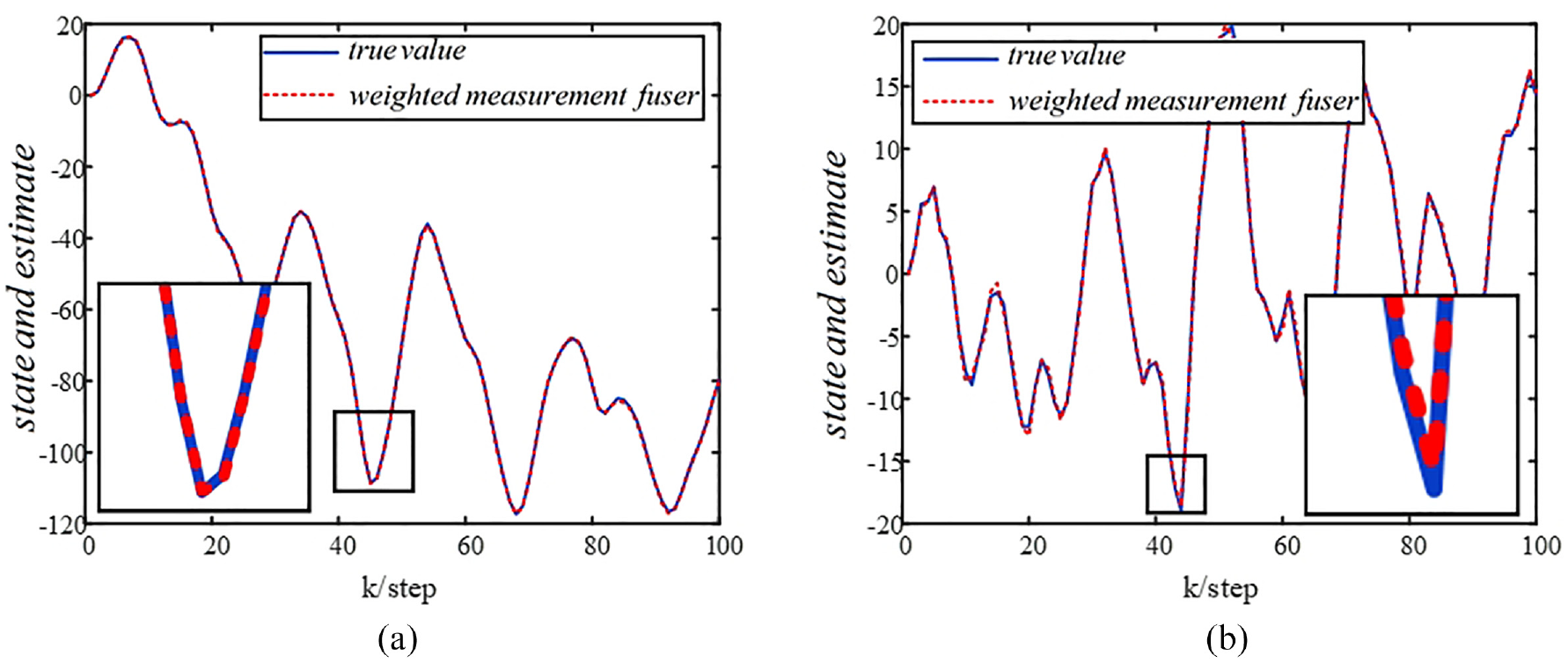
comparison curve of true value
comparison curve of true value
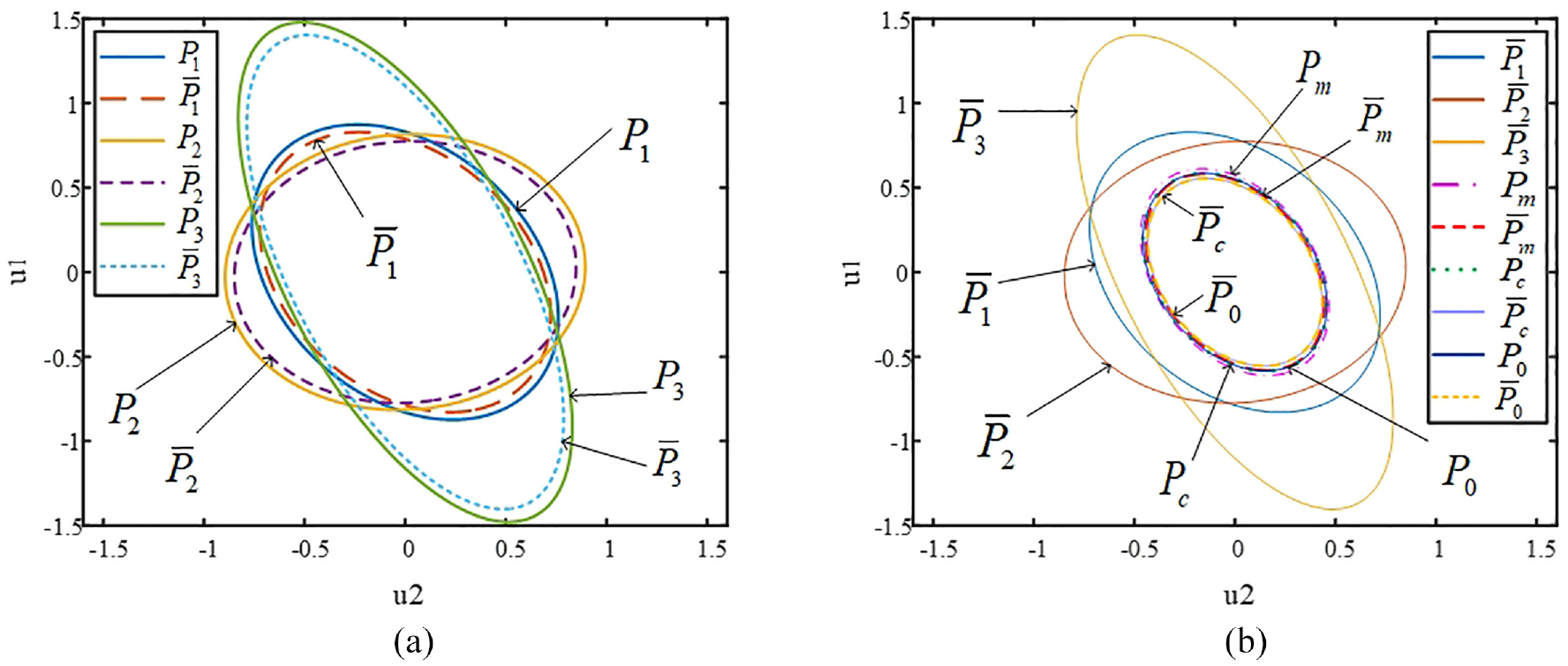
comparison curve of error variance matrix of local and fusion estimation: (a) local conservatism and actual error variance and (b) fusion conservatism and actual error variance.
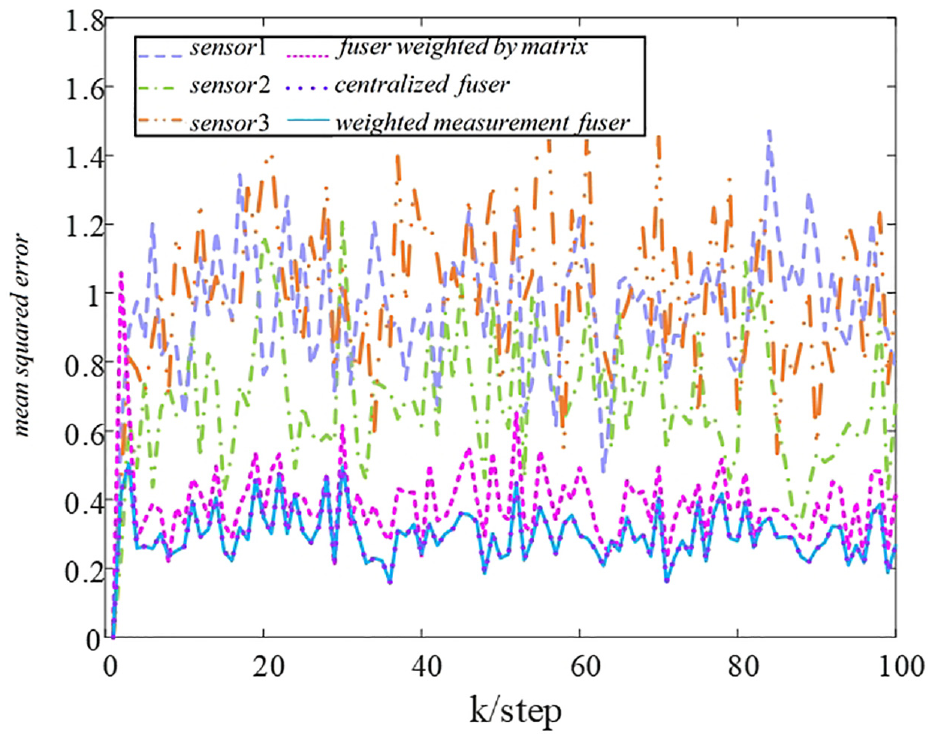
MSE curve of
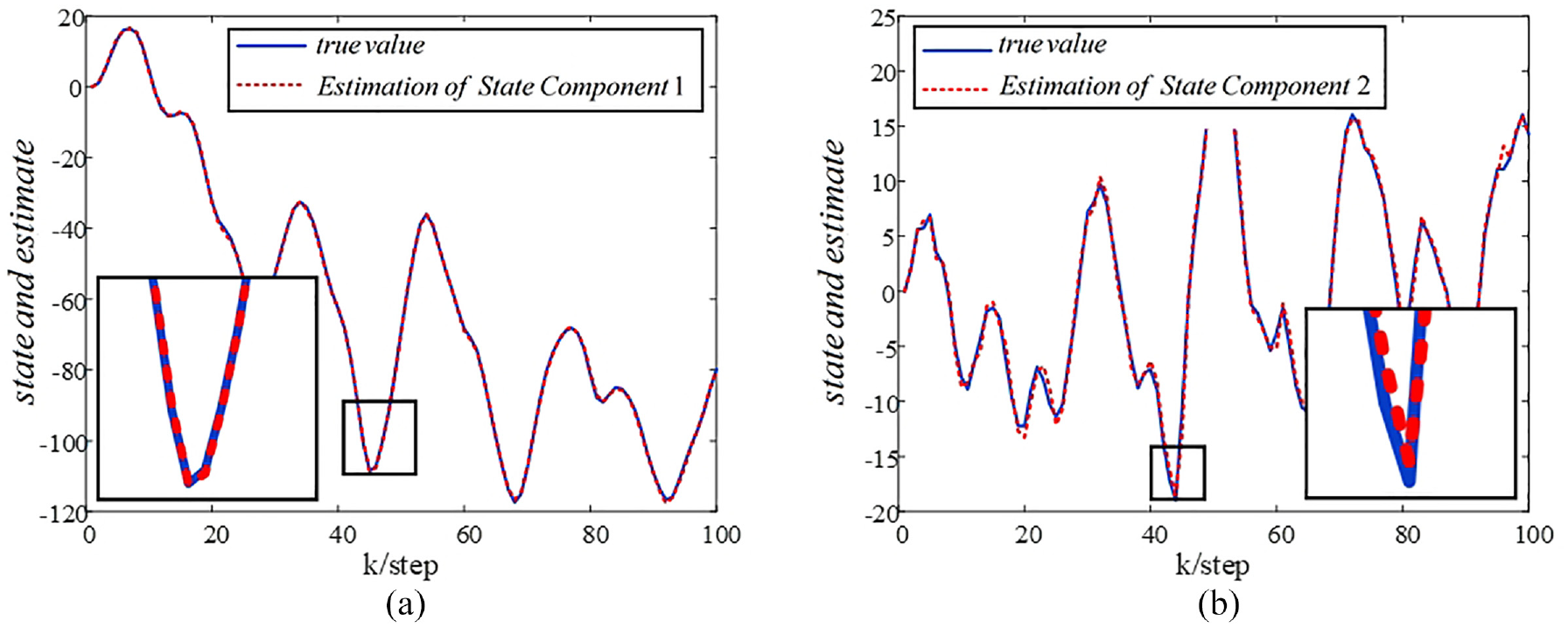
This section simulates and estimates the robust Kalman filtering algorithm proposed by Theorem 1 to Theorem 8 for fractional order systems with colored process noise, and the results are shown in Figures 1 to 6. Figure 1 shows the comparison curve between the state estimation of sensor 1 and the true value, indicating that the estimated value obtained by applying the filtering algorithm proposed in this section can effectively track the true value. Figures 2 to 4 show the fusion estimation of three sensor systems using three methods: matrix weighted fusion, centralized fusion, and weighted measurement fusion. It can be seen that the estimation accuracy of the three fusion fractional order Kalman filtering algorithms is higher than that of each local estimators.
Figure 5 shows the local and fused error variance matrix curves, obtaining
Conclusions
For the problem of state estimation of fractional order systems with colored process noise, this paper applied the state augmentation method, which eliminates the effect of colored process noise on fractional order systems. Compared with Refs.,32–34 the colored and uncertain process noise was considered and solved by augmentation method. In order to improve the estimation accuracy, three fusion algorithms were introduced. The weighted measurement fusion algorithm has the global optimality with the same estimation accuracy with the centralized fusion algorithm. The matrix weighted fusion algorithm is a globally suboptimal fusion algorithm, which could effectively improve the estimation accuracy compared with the local estimators. Finally, the simulation results show that the proposed algorithm is effective and feasible.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation (NNSF) of China under Grant 61104209, Open Bidding Project for Selecting the Best Candidates of Department of Science and Technology of Heilongjiang Province under Grant 2023ZXJ07B01 and Special Funds of Heilongjiang University of Basic Scientific Research Expenses for Colleges and Universities in Heilongjiang Province under Grant 2020-KYYWF-0098.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.