
Abstract
Efficient mineral hydraulic collection is a key issue in the mining of deep-sea minerals, where the collection efficiency is related to the lifted fluid velocity and the mineral particle velocity. In this paper, a robust control contraction metric (RCCM)-based tube model predictive control (Tube-MPC) for efficient mineral hydraulic collection is proposed. Firstly, a simplified control model is designed with empirical formula of hydrodynamic forces to avoid the computational burden in solution of the fluid equations. Secondly, a nonlinear programing problem (NLP) for efficiency optimization is formulated to calculate the nominal control law and the optimal state. To address external disturbance and model mismatch from the simplified model, a robust control contraction metric is utilized to calculate the feedback control law to track the optimal state. Finally, numerical simulations and experiments are conducted to verify the mineral hydraulic collection performance of the control strategy.
Introduction
With the development of human society, deep-sea minerals are becoming essential alternative resources. 1 In order to exploit these deep-sea mineral resources, China has proposed a deep-sea mining system in the experimental mining stage, as is shown in Figure 1. 2 The deep-sea mining system consists of lifting pulp, pipe system, buffer, self-propelled collector and surface system. An underwater tracked mining vehicle is used as the self-propelled collector system, as shown in Figure 2. The underwater tracked mining vehicle breaks a mineral into coarse particle with irregular shape. Then, the broken mineral is collected. Therefore, efficient mineral collection method is an important issue. 3
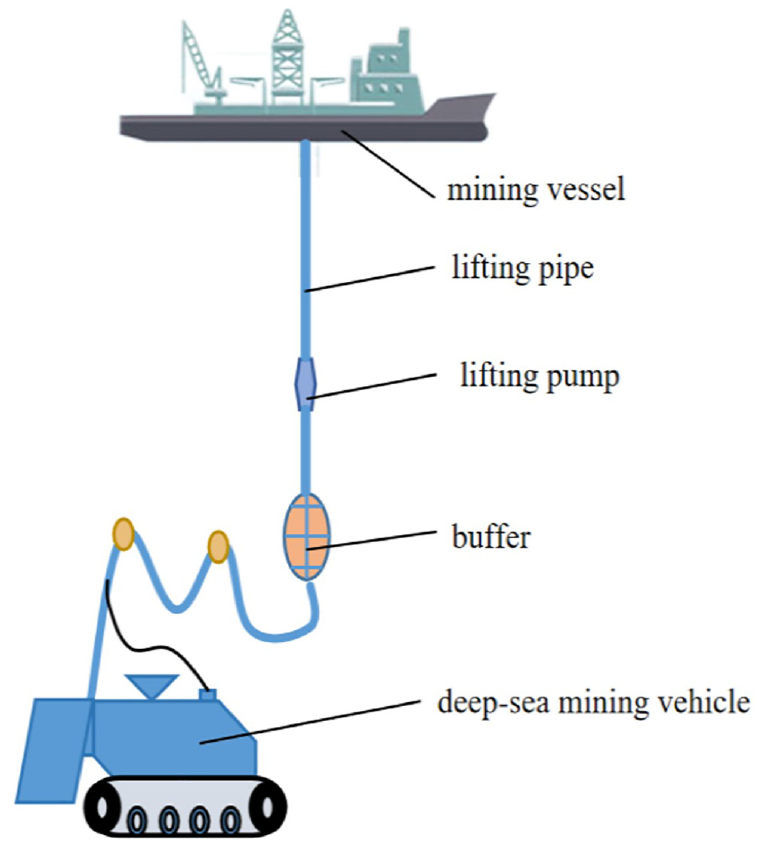
Schematic diagram of the deep-sea mining system.
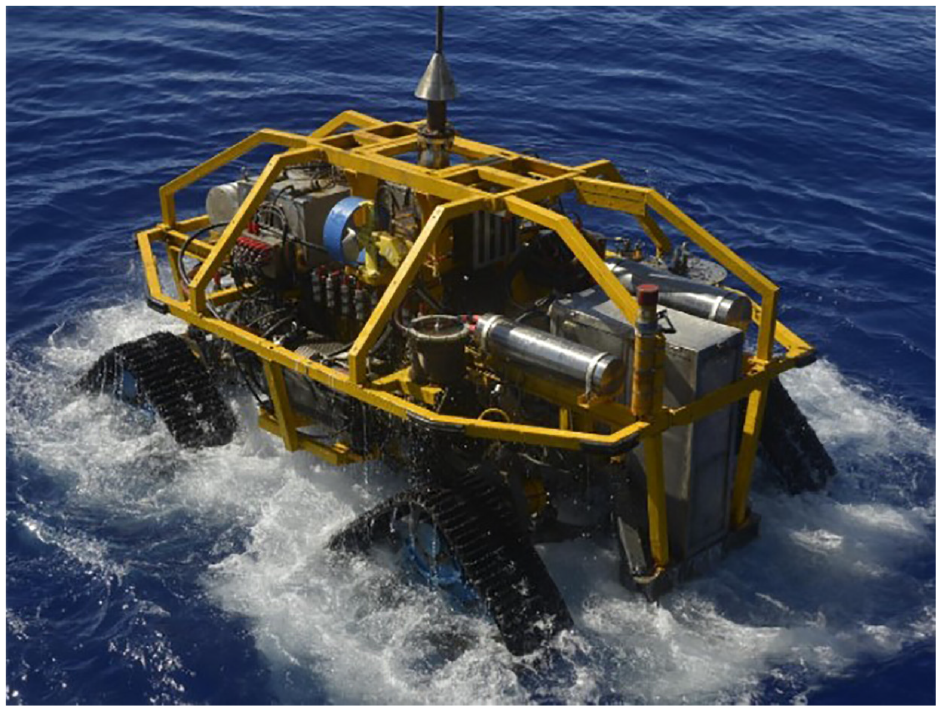
Underwater tracked mining vehicle.
Hydraulic collection way is effective and productive 4 and is widely used in the deep-sea mining system. The performance characteristics of the hydraulic collection way is discussed in Zhao et al., 5 Kang et al., 6 Zhang and Chen. 7 A novel hydraulic collection device using spiral flow is proposed in Zhao et al. 5 Compared with non-spiral flow, the spiral flow can achieve better hydraulic collection performance due to the enhancement of the coarse particle’s suction force. In order to further reveal the mechanism, a mechanical decomposition model is proposed to investigate dynamic characteristics. 7 Note that a pump is used to collect the broken mineral. Hydraulic performance of a multistage lifting pump is investigated in Kang et al. 6 Besides, a suitable balance hole diameter can keep a balance between negative flow loss and positive axial thrust due to the appropriate fluid flow. To conclude, the hydrodynamic characteristics of the lifted fluid plays a crucial role in the hydraulic collection performance. 8
In general, the novel passive design of a hydraulic collection system, such as system parameter optimization, 9 spiral flow principle, 5 and multistage lifting pump, 6 can enhance the hydraulic collection performance. In order to guarantee the operation stability of the system, some active control strategies are designed. Note that sliding mode control (SMC) is a robust control strategy and has the advantage of fast tracking of the desired signal, which can be used to guarantee the operation stability of an industrial system.10–12 For instance, in Zhang et al., 13 a model-based control strategy of the lifted fluid, using SMC technology, can enhance the hydraulic collection performance. Since previous studies on collection performance improvement mainly focused on the structure of the collection device, hydraulic collection performance improvement is limited. 14 Note that the hydraulic collection performance is related to hydrodynamic characteristics of the lifted fluid proposing an active control strategy to obtain the control law of the lifted fluid may be worth studying. However, proposing the control strategy still requires addressing two key issues.
Firstly, the accurate control model used in the control strategy need to be established. For a complex nonlinear system, active control strategy is developed based on a control-oriented model instead of a computationally heavy model. 15 The dynamics of the coarse particle and the lifted fluid is complex fluid-solid two-phase flow. Although motion characteristics and hydrodynamic forces have been investigated in Ren et al. 16 and Zhang et al. 17 the accurate control model can be achieved using an optimized Eulerian–Lagrangian method. There is excessive numerical calculation burden in the solution of these fluid equations, which may lead to poor real-time performance. Moreover, optimal control problem based on the model is easy to have no solution. To overcome this issue, a simplified control model needs to be established, which may lead to control performance degradation.
Secondly, the control algorithm should ensure good real-time performance and good robustness against the model mismatch. Although the SMC has the potential of guaranteeing the operation stability of an industrial system,10–12 the SMC is sensitive to process noise in the actual control system and suffers from chattering phenomenon. Model Predictive Control (MPC) is a model-based optimal control algorithm. Benefit from its rolling optimization mechanism, the MPC algorithm can provide some assistance for disturbance rejection. 18 However, the disturbance rejection performance is limited. When the disturbance mainly comes from the model mismatch, which depends on the state, the control performance be greatly degraded. 19 Therefore, classical MPC may not be suitable for the mineral hydraulic collection system. Tube MPC is an enhanced MPC algorithm and has better robustness against disturbance such as model mismatch, which is firstly proposed to be used in a linear system. 20 The robustness is achieved by the feedback control law and tightened constraints. Note that the feedback control law is obtained based on the state transition properties of the system. In a linear or a weak nonlinear (Lipschitz nonlinear system), 21 the feedback control law can rely on the solution of linear matrix inequality (LMI) offline. However, for a general nonlinear system, the feedback control law need to be calculated online to satisfy the nonlinear characteristics of the system. 22 This will bring extra computational burden, which may lead to poor real-time performance.
To overcome the issue, this paper proposes a novel efficiency optimization control strategy for performance improvement of deep-sea mineral hydraulic collection mining system. The main contributions are given as follows:
(i) A novel active control strategy by adjusting the pump flow rate dynamically to enhance hydraulic collection efficiency is firstly proposed. A control system of the hydraulic collection system is built to verify the hydraulic collection performance of the novel control strategy, as is shown in Figure 3.
(ii) A simple control model of the hydraulic mining system in the novel control strategy is established to avoid numerical calculation burden in the solution of these fluid equations. The state is denoted by the fluid velocity and the particle velocity, and the fluid velocity change rate is the control input.
(iii) With the general nonlinear state transition characteristic of the hydraulic mining system fully considered, a robust control contraction metrics (RCCM) is utilized to address model mismatch between the actual model and the simple control model. 23
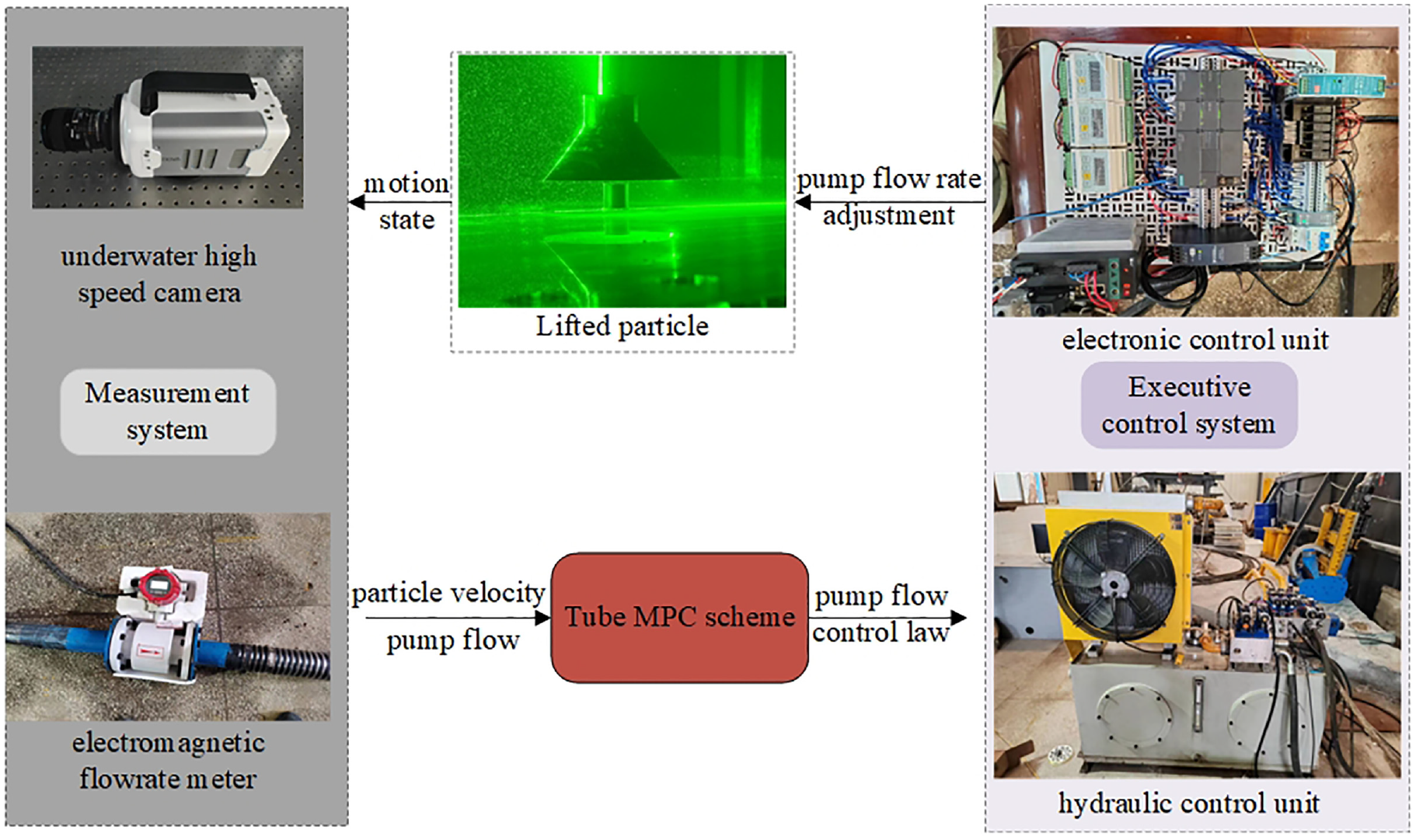
The overall control system of the hydraulic lift system.
The remainder of this paper is organized as follows. In Section II, the control model of the hydraulic lift collection method is given. In Section III, the detail design of the novel control strategy is given. In Section IV, results and discussion are given.
Physic-based and control-oriented modeling
In order to simulate the hydraulic collection process, a simplified experimental setup is designed, and its working principle is shown in Figure 4. The inlet of the collection device is a bell-mouth shaped collection cover, and the upper end of the collection port is directly connected with a centrifugal suction pump. Mineral particles are scattered on the seabed surface. In the hydraulic collection process, the suction port at the bottom of the hydraulic ore collection device is close to the seabed. Due to the suction of the ore collection pump, under the action of medium water, mineral particles are lifted from the seabed and inhaled into the collection entrance.
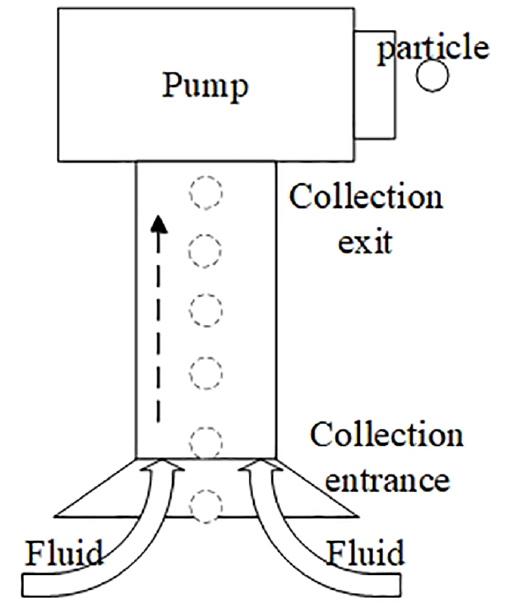
Working principle of the hydraulic collection.
Note that hydraulic collection performance of coarse particles are related to speed of the fluid and the speed of the coarse particle. 5 Then, a simplified control model of the mineral hydraulic collection method is obtained, where the fluid velocity, which can be adjusted by a hydraulic pump, is used as the control input.
Hydrodynamic analysis
Mineral particle includes manganese nodules, cobalt-rich crust, polymetallics sulfide and so on. Usually, deep-sea minerals are collected and lifted in particle form by the mining system. The manganese nodules, whose shape is irregular, as shown in Figure 5(a), is collected directly. The cobalt-rich crusts and polymetallics sulfide are broken into irregular shaped particle before being collected, as shown in Figure 5(b). Note that the hydrodynamic force of irregular shaped particle is difficult to obtain precisely, and the mineral particle can be modeled as a sphere. 24
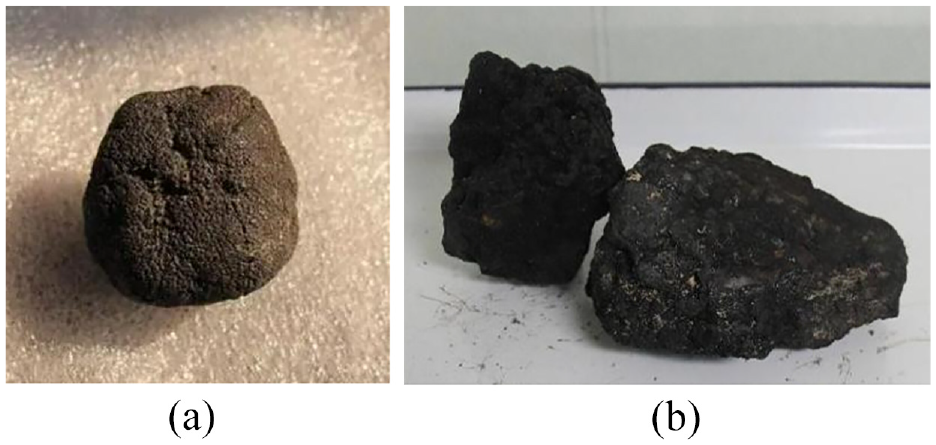
Shape of mineral particle for: (a) manganese nodule and (b) cobalt-rich crust and polymetallic sulfide.
Note that an underwater high-speed camera can act as the sensor for a particle. Only the degree of freedom (DOF) in the upward direction of a particle is considered in the simplified control model. Hydrodynamic forces of a particle are considered in three types: buoyancy

where
Particles move in the fluid, and the surrounding fluid can act as an acceleration. There is energy transfer with the surrounding fluid. From another point of view, it can be equivalent to the increase of particle mass, that is, an additional mass

where
Following Schiller and Naumann,
25
the drag force

where
Collection efficiency
Note that the collection efficiency is a key index to evaluate the hydraulic collection performance, and the collection efficiency is deduced as follows:
According to the analysis in Schulte,
26
it can be seen that the pressure loss

where
The collection efficiency

where
State space model
Denote the state and the control input by

where

The actual model is expressed as follows:

where
Efficiency optimization control strategy
Note that the control model mainly simplified in the hydrodynamic force of the particle, and the mismatch between the actual system and the control model is introduced. When designing an efficiency optimization control strategy based on this control model, mineral hydraulic collection performance degradation may arise due to the model uncertainty from the model mismatch and the external disturbance. Considering the Tube MPC scheme’s robustness against the model uncertainty, 23 the control strategy, whose scheme is shown in Figure 6, is proposed based on the Tube MPC scheme.
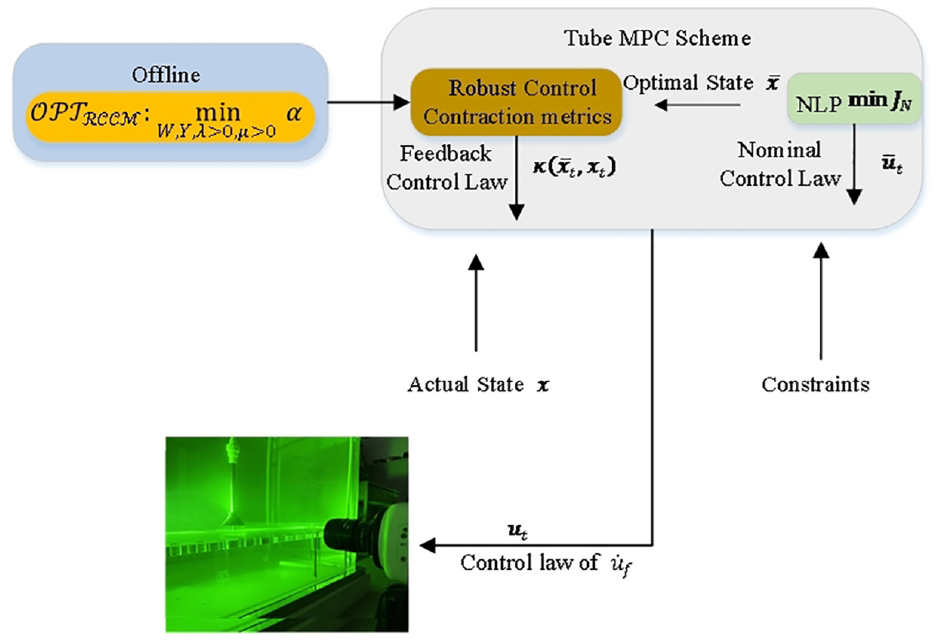
Scheme of the control strategy.
The control law of tube MPC scheme consists of two aspects: the nominal control law

The nominal control law
The feedback control law
With the feedback control law obtained

where
Preliminaries
Control Contraction metrics (CCM) is a technology used to ensure the incremental stability of a general nonlinear system based on its differential dynamics.
27
In this paper, a robust CCM (RCCM) is used to design the feedback control law
Definition 1: (Universal

satisfies a function
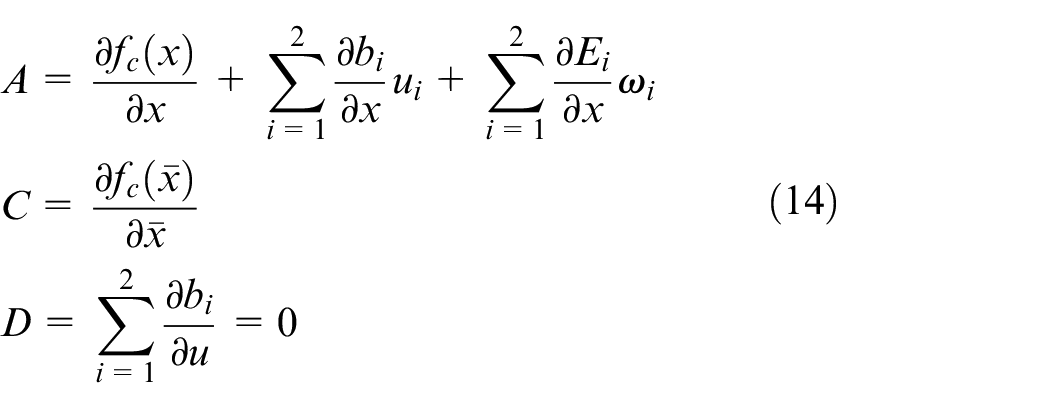
The differential dynamics of the system (4) and the system (7) is given as follows:

where matrices
Denote the differential feedback control law by

where

Definition 2: (Differential

where the function
where
The metric
where the matrix

Nominal control law
The control strategy is proposed to enhance the lifting efficiency

where
Similar to Zhao et al., 28 nominal constraints are given:

where

Note that the system dynamic is given in (13), and a nonlinear programing problem (NLP) for efficiency optimization is formulated to obtain to the nominal control law and the optimal state:

where

Feedback control law
Note that the system dynamics of the hydraulic mining system given by (5) is neither linear nor weak nonlinear (Lipschitz nonlinear system), and then the offline feedback strategy, which is robust against the disturbance with good real-time performance in the kind of system, 21 is not applicable in the hydraulic mining system. Then, a computationally efficient online feedback control law based on the RCCM technology is designed for the hydraulic mining system.
The minimum path energy joining
where
The matrix function

where the universal
The universal
Remark 1: Following Sasfi et al.,
23
if the universal
It has been proven that feedback control law (24) can effectively converge the deviation between the actual state and optimal state.
23
We assume that the terminal feasible set
Implementation
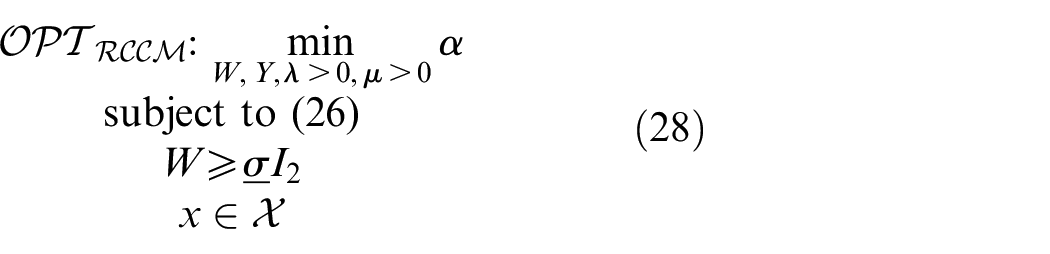
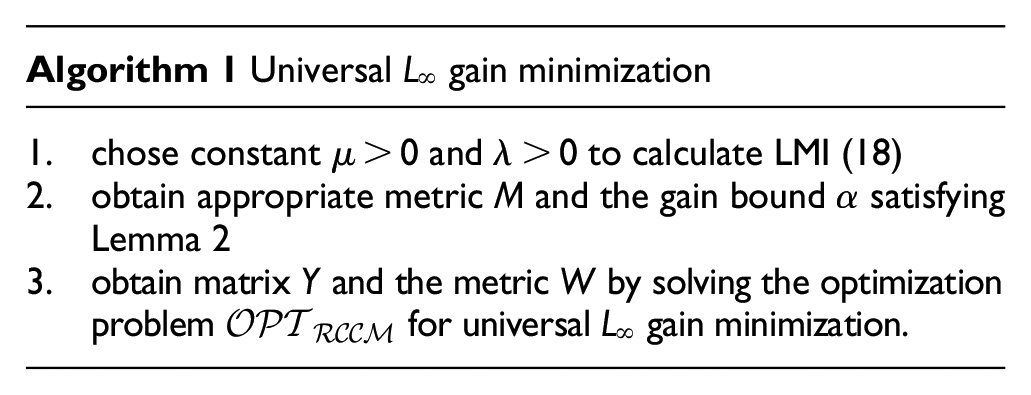
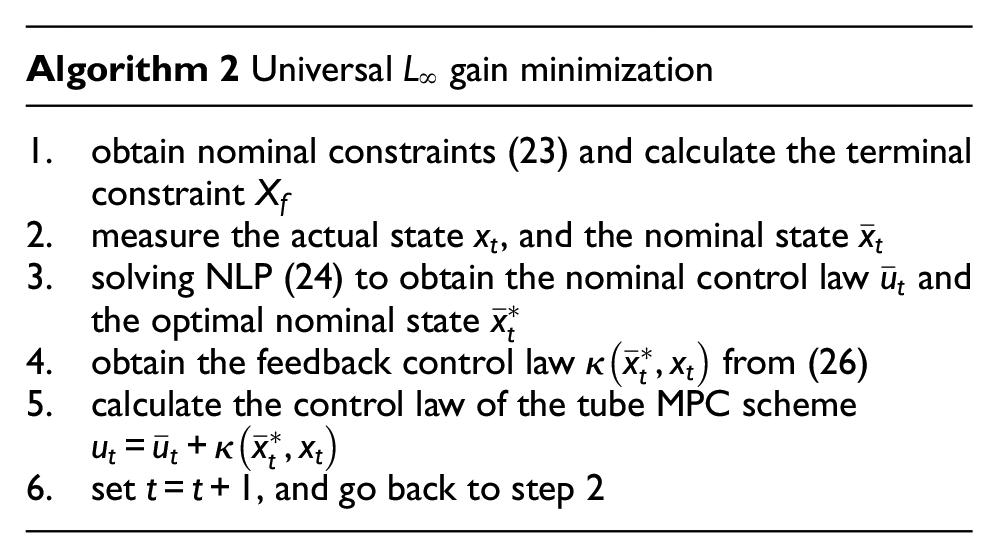
To conclude, the efficiency optimization control strategy consists of an offline algorithm and an online algorithm. The offline algorithm is utilized to obtain the universal
Results and discussion
Note that model uncertainty, such as external disturbance and model mismatch will degrade the control performance. With the hydrodynamic empirical formula introduced in the simplified control model, the model mismatch is introduced, whereas the external disturbance is from ocean currents. Therefore, comprehensive sensitivity analysis is conducted in numerical simulations, and what kind of disturbance can be attenuated using the proposed control strategy is analyzed. Moreover, experiments are done for compelling validation.
Simulation analysis
To consider model mismatch in numerical simulations, a function with random variations is introduced in the controlled model in numerical simulations:

where
To conduct a comprehensive sensitivity analysis, numerical simulations considering the impacts of several types of model uncertainty are conducted. The simulation results that solely consider the impact of model mismatch are represented in the way, that is, “
To reveal the superiority of the proposed method, several methods are used in numerical simulations. “MPC” denotes experimental results using a nominal MPC controller from Tarragona et al.
30
“CCM” denote experimental results using CCM in the feedback control law from Zhao et al.
28
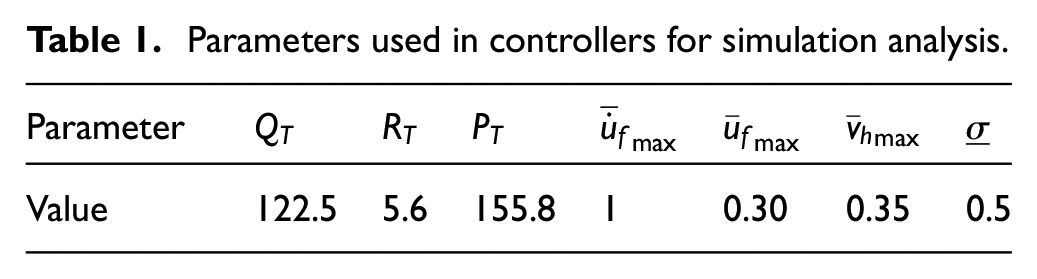
“RCCM” denotes experimental results using the proposed control strategy in this paper. Main parameters in controllers are listed in Table 1. Weight matrices in “RCCM” are the same as that in “MPC.” Main parameters used in the model are given as:
Parameters used in controllers for simulation analysis.
Hydraulic collection performance using “RCCM.”

Hydraulic collection performance using “CCM.”

Hydraulic collection performance using “MPC.”

From the simulation results, under all types of model uncertainty, the collection efficiency and lift time of “CCM” can be improved, whereas the lift time is reduced, compared with that of “MPC.” Hydraulic collection performance of “RCCM,” such as collection efficiency and lift time, is also improved under all types of model uncertainty, compared with that of “CCM.” It can be seen the Tube MPC scheme enhance the robustness against the model uncertainty. However, with CCM utilized, hydraulic collection performance considering external disturbance and model mismatch is worse than that just considering external disturbance. With RCCM utilized, better hydraulic collection performance can be achieved. The hydraulic collection performance considering external disturbance and model mismatch is almost the same as that just considering external disturbance. It can be seen that the model mismatch can be effectively attenuated using the proposed control strategy.
From the simulation results, using the three methods, the hydraulic collection performance just considering model mismatch is better than that just considering sine disturbance, and the hydraulic collection performance just considering sine disturbance is better than that just considering random disturbance. The hydraulic collection performance considering sine disturbance and model mismatch is also better than that considering random disturbance and model mismatch. It can be seen that the random disturbance can degrade the hydraulic collection performance to the maximum extent, and then the proposed simplified model is most sensitive to random disturbance signals.
Experiment setup
Note that the experimental cost of a sea trial of the deep-sea mining system, shown in Figure 1, is too high. To focus on the hydraulic collection performance of the novel control strategy, a simplified experimental setup is built. The hydraulic collection system, as is shown in Figure 7, mainly consists of a computer system, a water tank, a pump, a force sensor and an underwater high-speed camera.
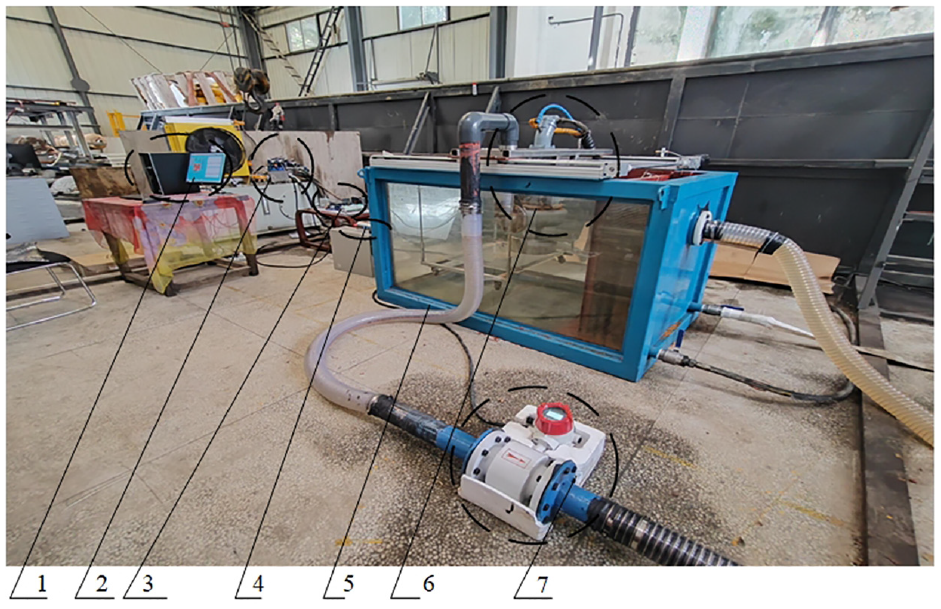
The overall hydraulic collection system (1. computer system, 2. hydraulic control unit, 3. electrical control unit, 4. underwater highspeed camera, 5. water tank, 6. pump, 7. electromagnetic flowmeter).
The size of the water tank is 2.0 m × 1.2 m × 1.0 m. The pump’s power is 5.5 kW, and its maximum flow rate is 150
Note that fluid flow velocity
Experimental results
To focus on the hydraulic collection performance, the lifted particle is prepared, whose diameter is 35 mm.
Experimental results of different constant pump flow rate’s lifting time and collection efficiency are show in Figure 8. When the pump flow rate
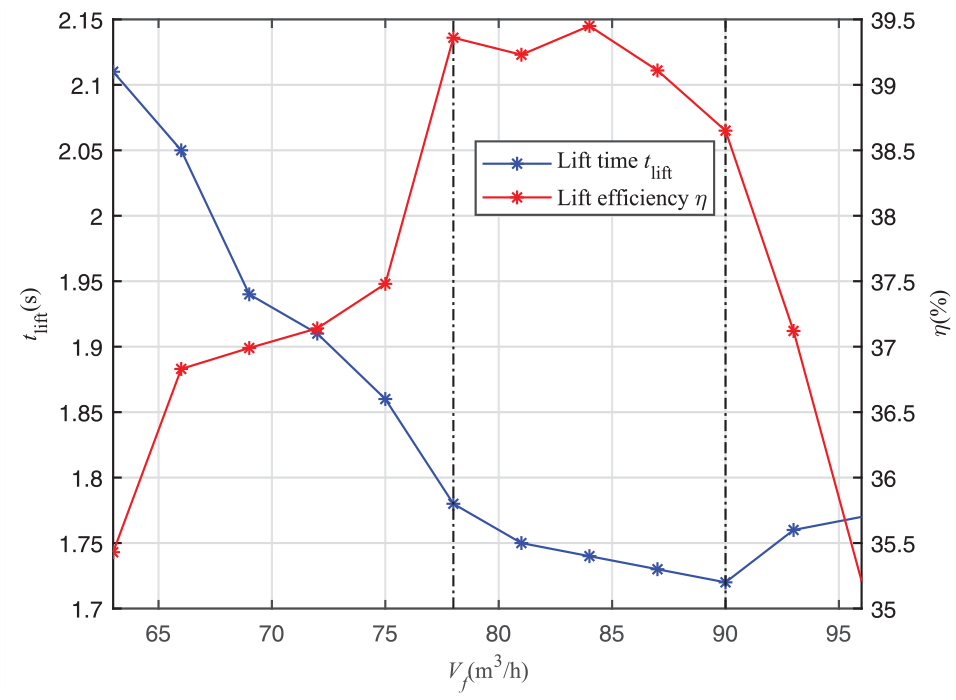
Hydraulic collection performance of the constant pump flow rate.
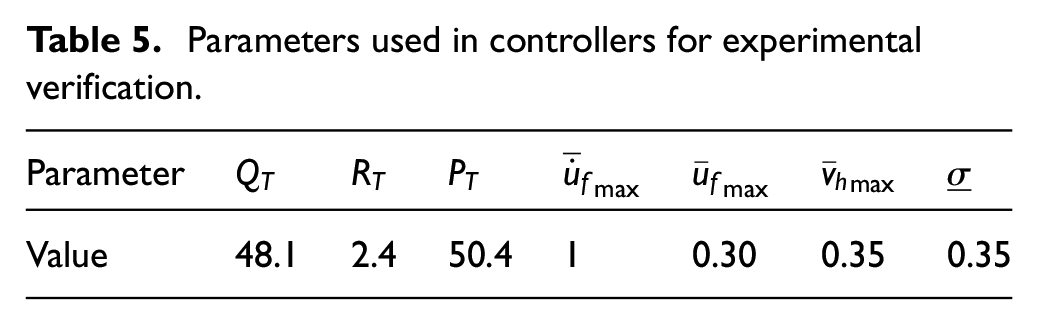
Experiments are conducted to compare the hydraulic collection performance of the control strategy and the constant pump flow rate. “MPC” denotes experimental results using a nominal MPC controller from Tarragona et al. 30 “CCM” denote experimental results using CCM in the feedback control law from Zhao et al. 28 “RCCM” denotes experimental results using the proposed control strategy in this paper, and the main parameters used in controllers are listed in Table 5.
Parameters used in controllers for experimental verification.
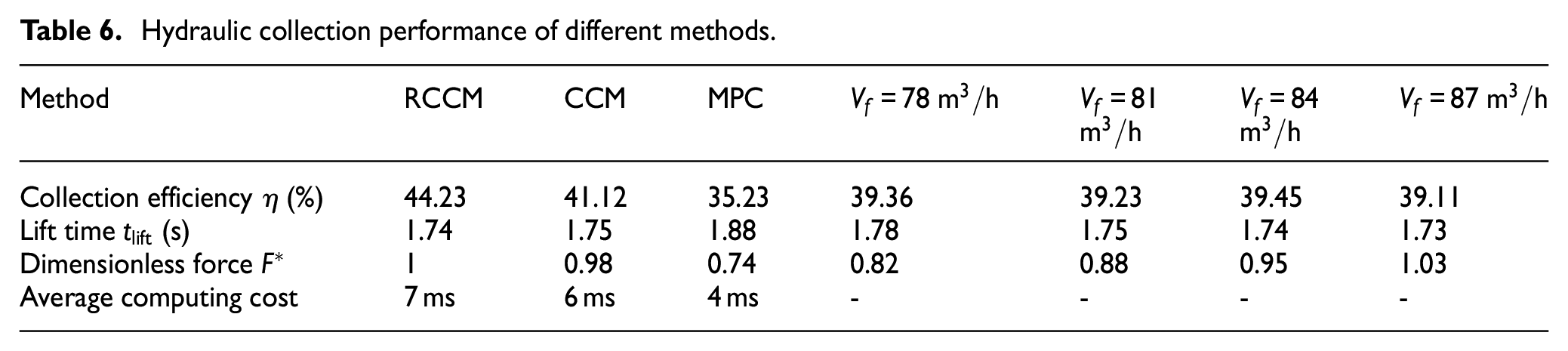
To compare the hydraulic lifting performance intuitively, experimental results are listed in Table 6, where the method ‘
Hydraulic collection performance of different methods.
The mechanism of the control strategy is to obtain the control law of the optimal pump flow rate within an optional range. The constraint of the pump flow rate can be set as: 78–90
Note that the control model of the mineral hydraulic collection has been simplified. To verify the accuracy of the control model, nominal velocity of the particle and actual velocity of the particle are shown in Figure 9. Nominal velocity of the particle is denoted by “nominal.” It is derived from the state transition relationship of nominal model (4), where the control inputs are the actual inputs measured during the experimental process. Actual velocity of the particle is denoted by “Actual,” which is measured during the experimental process. As shown in Figure 9, the “Nominal” tracks the “Actual” well. Therefore, the proposed model is accurate to some extent.
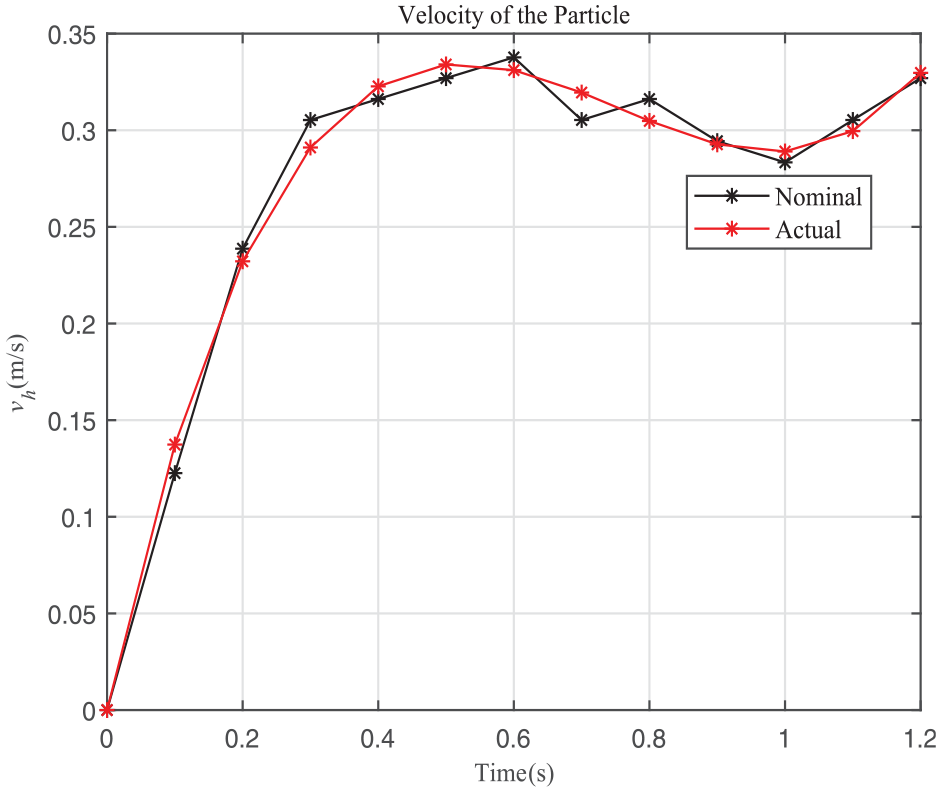
Range of velocity of the particle.
Note that the control law of the optimal pump flow rate is varied based on the Tube MPC scheme. To verify that the control system can effectively track the optimal pump flow rate, the range of the pump flow is shown in Figure 10. “Real-time” denotes the pump flow rate measured by the electromagnetic flowmeter. “Tube MPC” denotes the control law of the optimal pump flow rate. As shown in Figure 10, the “real-time” can track “the Tube MPC” well.
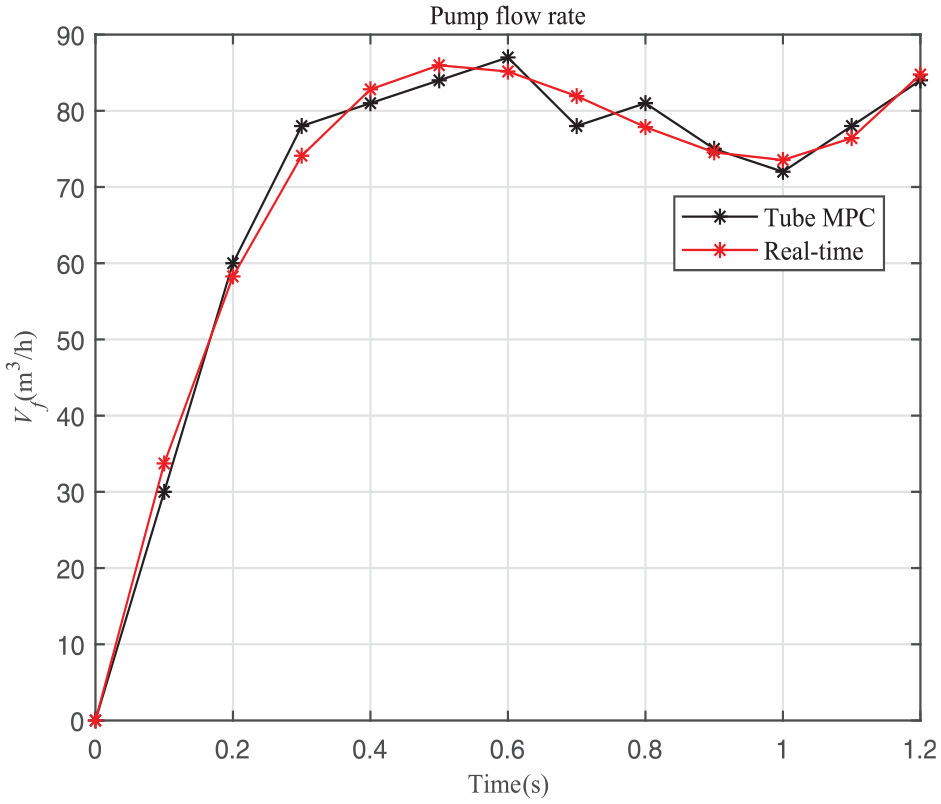
Range of the pump flow rate.
As shown in Table 6, the collection efficiency of “MPC” is reduced, compared with that of constant pump flow rate. It can be seen that the inherent robustness of “MPC” fails to address the model mismatch, and the model mismatch leads to control performance degradation. The collection efficiency of “CCM” can be improved by about 5%, compared with the max the lift efficiency of constant pump flow. The collection efficiency of “RCCM” can be improved by about 6%, compared that of “RCCM.” It can be seen the Tube MPC scheme can address the model mismatch effectively. With RCCM introduced in the feedback control law, better hydraulic collection performance can be achieved. The lift time of “RCCM” is almost the same as that of constant pump flow and “CCM.” As the average computing cost shown in Table 6, the average computing cost of “RCCM” and “CCM” is almost the same as that of “MPC.” Then, good real-time performance can be achieved.
To compare the lifting force intuitively, a dimensionless force

where
The range of the dimensionless force is shown in Figure 11. It can be seen that the lifting force of the “RCCM” and “CCM” is almost bigger than that of the constant pump flow rate. With the pump flow rate adjusted in real time, the lifting force can be increased to achieve better collection efficiency.
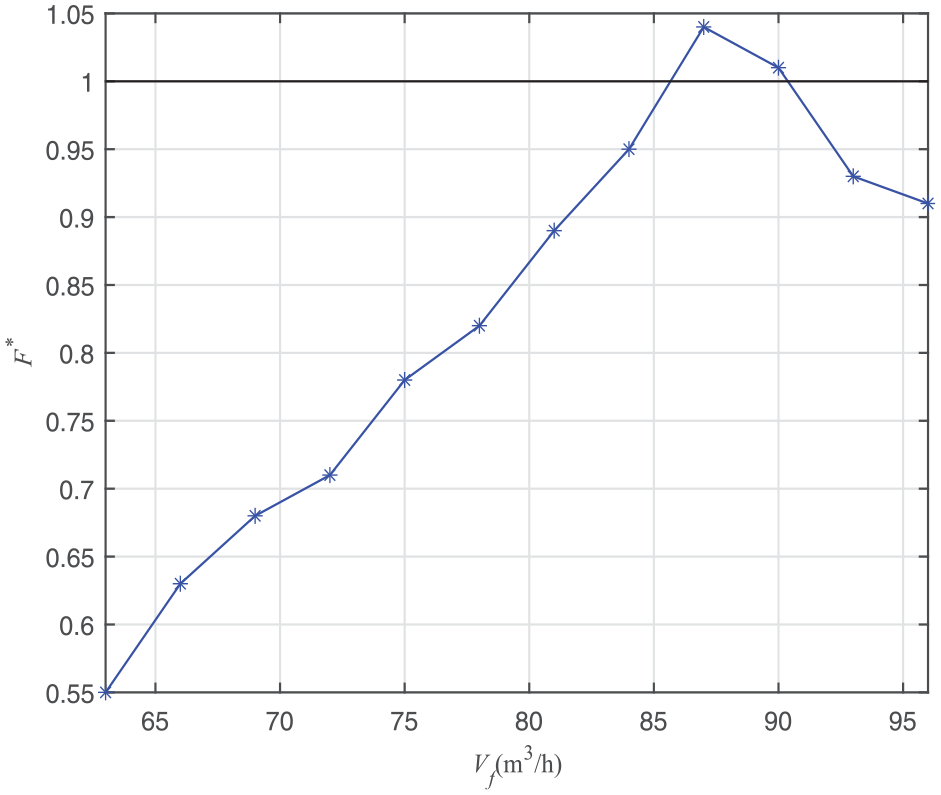
Range of the dimensionless force.
Conclusion
In this paper, a novel control strategy is proposed to enhance the hydraulic collection performance of the deep-sea mineral hydraulic collection mining system. The mechanism of the novel control strategy is to obtain the control law of the pump flow rate based on the Tube MPC scheme. The robustness against the model mismatch is achieved by the RCCM, and the proposed control model is reasonable. Numerical simulation results show that the simplified model is sensitive to random disturbance, and the proposed control strategy can effectively attenuate the model mismatch. Experiment results show that the novel control strategy can enhance the lift force, compared with that of the constant pump flow rate. With the collection efficiency improved, the novel control strategy has practical application value of the commercial exploitation in the future.
The proposed novel control strategy shows the good robustness against model mismatch, however, in the simplified experimental setup, robustness against external disturbance, such as ocean current disturbance, can’t be effectively tested. In a deep-sea mineral hydraulic collection system, the ocean current disturbance may degrade the control performance. In the future, the control strategy will be tested in an actual sea trial.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research work was supported by the Key R&D Program of Hunan Province (Grant No.2022GK2066) and the National Natural Science Foundation of China (Grant No.52171295).
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.