
Abstract
Robot tea picking is an inevitable trend to solve the problem of tea picking, and the picking path planning is directly related to the robot picking efficiency. An Improved Ant Colony Algorithm (IACA) is proposed, which firstly introduces the adaptive adjustment mechanism into the pheromone volatilization factor of the ant colony algorithm, and then sets the pheromone volatilization factor with a high initial value to improve the searching speed, and then adjusts the size of its value within a certain range in real time according to the iterative results, and finally solves the problem that the searching of the ant colony algorithm is prone to fall into the local optimal solution. On the basis of visual recognition of tea leaves and obtaining coordinate information, the improved ant colony algorithm is used to enter the path planning simulation experiments, and the planning results of the other six algorithms are compared with the similar algorithms and dissimilar algorithms, and the experimental results indicate that the IACA method has improved the shortest path index by 5% compared to the basic ant colony algorithm, and by an average of 4% compared to similar improved ant colony algorithms. In comparison to different optimization algorithms, the enhancement has an average increase of 6%; Furthermore, the convergence speed has been improved by 60% compared to six other methods. The standard deviation of repeated experimental results is 50% lower than the other six methods. The gap between the results of multiple repeated experiments is small, the degree of fluctuation is low, and the calculation results are more stable, which verifies the superiority of IACA method. Therefore, the improvement of the ant colony algorithm makes the pheromone concentration value with adaptive adjustment ability, which reflects good effects in path optimization, convergence speed improvement, stability of results, etc., and has good application value for the path planning problems such as tea picking, which has complex paths and large computational volume.
Introduction
Tea is a globally revered green beverage. 1 The key process in tea production is tea leaf plucking. Traditional manual tea leaf plucking is not only time-consuming and labor-intensive but also inefficient. Existing tea leaf picking robots1–3 mainly use reciprocating cutting methods, which lack intelligent selective harvesting and result in poor leaf integrity, failing to meet performance requirements. Achieving precise and fast tea leaf picking is a significant challenge that hinders the development of the tea industry. Therefore, obtaining tea leaf picking points through visual positioning technology and planning the optimal path for tea leaf picking are of practical importance.
Path planning refers to the process of finding the best route from a starting point to a target point in a given environment. Common constraints in path planning include minimizing time, avoiding collisions, maintaining smoothness, and minimizing distance. 4 Harvesting path planning 5 is the specific application of path planning in the field of crop harvesting. It typically involves multiple points and can be approximated as a Traveling Salesman Problem (TSP). The TSP is where a salesman starts from a city, visits each city once, and returns to the starting point, aiming to minimize time or distance traveled. Its computational process is more complex, requiring higher performance from planning algorithms.
Currently, scholars in the industry have made some achievements in path planning. For example, in the field of obstacle avoidance navigation for unmanned aerial vehicles (UAVs), Zhou et al. 6 proposed an improved ant colony algorithm for three-dimensional space. Compared to traditional algorithms, this algorithm greatly improves search time and finds the shortest path. However, the performance of the method is affected by parameter settings, and the initial parameters are mainly determined by the experience of test personnel, making the algorithm susceptible to human factors and resulting in unstable effects. In order to solve the problem of poor coverage path planning for multiple UAVs, Chen et al. 7 analyzed the constraints and objectives of UAV planning problems and proposed an improved ant colony algorithm. This algorithm optimizes the area allocation and visit order of UAV coverage paths, and experimental results show that the method can provide UAVs with highly reasonable paths in the shortest possible time, significantly improving algorithm performance with broad application prospects. Regarding collision-free path planning for mobile robots, Zghair and Al-Araji 8 combined the firefly algorithm with an improved hybrid particle swarm algorithm and proposed a hybrid algorithm suitable for wheeled mobile robot path planning. Experimental results show that the hybrid algorithm has a significant increase in the optimal solution compared to other path planning algorithms in terms of path length. Rasheed et al. 9 established a reference path equation for mobile robots and proposed a hybrid RRT × PSO algorithm. Experimental results show that the planning results of this algorithm have significant advantages over other algorithms in terms of path length and smoothness of the path trajectory.
Some scholars consider integrating several intelligent algorithms, taking advantage of each other’s strengths and making up for their weaknesses, to propose improved path optimization algorithms for different scenarios. For example, in the context of warehouse logistics transportation, Zhang et al. 10 proposed a master-slave ant colony algorithm that consists of two groups: the auxiliary ant colony and the master ant colony. They used the planning results of the auxiliary ant colony to accelerate the optimization speed and quality of the master ant colony, and optimized other strategies of the ant colony algorithm. Sun and Xin 11 used fruit fly algorithm to generate initial pheromone information for ant colony algorithm, and then used the ant colony algorithm for path planning. To address the slow convergence speed and the tendency to get trapped in local optima in ant colony algorithm for mobile robot path planning, Wang et al. 12 proposed an improved ant colony algorithm. This algorithm introduced the Floyd algorithm to generate guiding paths, adopted a backtracking strategy to improve the search success rate for target nodes, improved the heuristic function, and optimized the multi-objective function. Although the above-mentioned improved algorithms have optimized the initial parameters of the basic algorithms, reducing the randomness in the early search stage and improving the convergence speed, they are more susceptible to the influence of initial better solutions in the later iterations, resulting in reduced global search capability, prone to local optima, and premature convergence. Moreover, they have increased the complexity of the algorithms, leading to longer execution times.
Other scholars have made improvements to some rules of the algorithms based on their principles, reducing the dependence on initial solutions and creating stronger randomness. For example, Li et al. 13 proposed an optimized ant colony algorithm for adaptive environmental sampling of autonomous underwater vehicles. This algorithm improved the state transition rules, global update rules, and local pheromone update rules. Meng et al. 14 proposed an Elite Smooth Ant Colony Optimization (ESACO) algorithm for spatial obstacle avoidance path planning of grasping manipulators. They improved the state transition probability and pheromone update strategy. Li et al. 15 proposed a Dynamic Chaotic Ant Colony Optimization (DCACO) algorithm to address the slow convergence speed and tendency to get trapped in local optima in traditional ant colony algorithms. They used cosine annealing strategy to improve the expected heuristic factor, introduced an improved logical chaotic operator to avoid getting trapped in local optima in the initial iterations, and automatically eliminated it in the later iterations to ensure convergence speed, resulting in good path search performance and convergence speed. However, most of the above-mentioned algorithms are mainly focused on the navigation of drones and ships, and their effectiveness in the specific field of harvest path planning still needs to be validated. In addressing the path planning problem of multiple welding points of car doors and the TSP problem, Ma et al. 4 proposed an ant colony algorithm based on dynamic pheromone update strategy according to information entropy and stagnation times, as well as an ant colony algorithm based on the reward and penalty strategy of the optimal path set. This method has high solving accuracy and effectively balances the contradiction between solution accuracy and convergence speed. Although the above methods have made certain progress in solving the TSP problem, they still have a limited number of task points planned. Considering that when the tea plants grow too densely and there are too many picking points, the existing algorithms may take too long to plan the picking paths, resulting in high route crossing rate and complex routes, which cannot meet the requirements of tea picking robot path planning.
Based on the self-developed tea picking robot, this paper studies the problem of tea picking path planning for the picking manipulator. Within certain constraint conditions and based on the actual distribution of tea plants, the planning problem is simplified as a TSP-like problem. A improved ant colony algorithm with adaptive adjustment of pheromone concentration value, namely IACA, is proposed for the tea picking path planning. The results of the proposed algorithm are compared with the basic ant colony algorithm and other different improved path planning algorithms. The main innovative points of this paper are as follows:
(1) Aiming at the problem of automated tea leaf picking, the spatial data of the actual distribution of tea plants is combined to transform the problem into a variant of the traveling salesman problem. A mathematical model for the TSP problem is provided.
(2) Building upon the basic ant colony algorithm, an adaptive ant colony algorithm for tea leaf picking path planning (IACA) is proposed, aiming to plan the optimal path for the picking machinery in the shortest possible time.
The rest of this paper is structured as follows: Section 2 introduces the target environment for path planning. Section 3 presents the mathematical model of the improved ant colony algorithm. Section 4 provides the experimental simulation results and analysis. Section 5 concludes the paper.
Robotic path planning modeling
Introduction to tea picking robots
The group has carried out a more in-depth research on autonomous robot tea picking and built an experimental prototype. 3 The tea picking robot is mainly composed of a tracked mobile platform, a picking robot arm hand, a picking device, an image recognition system and a control system. The picking robot selects the SCARA arm with a working radius of 500 mm, and the tea picking adopts bionic picking claws, the whole machine structure shown in Figure 1.

Prototype of autonomous tea shoot harvesting robot.
Modeling the path planning environment
Picking path planning for tea picking robots is carried out with the aim of finding a shortest possible picking path for the robots through an efficient and fast method to ensure that the robots improve their work rate while accomplishing the required tasks.
In the current tea planting mode, tea farmers will regularly prune the tea tree to ensure that the height of the branches of the tea tree is flat, so in large-scale tea gardens, the distribution of tea leaves can be approximated as a random distribution on a two-dimensional plane as shown in Figure 2, with a small height gap, and the distance of the picking point in the vertical direction can be ignored when path planning for tea picking.

Distribution of tea shoots: (a) tea bush perspective and (b) tea bush close-up.
The standard width of the tea long is 800 mm, the working radius of the robotic arm is 500 mm, and the maximum working radius of the robotic arm is the diagonal, the maximum working range of the picking robot is obtained as a rectangular area.
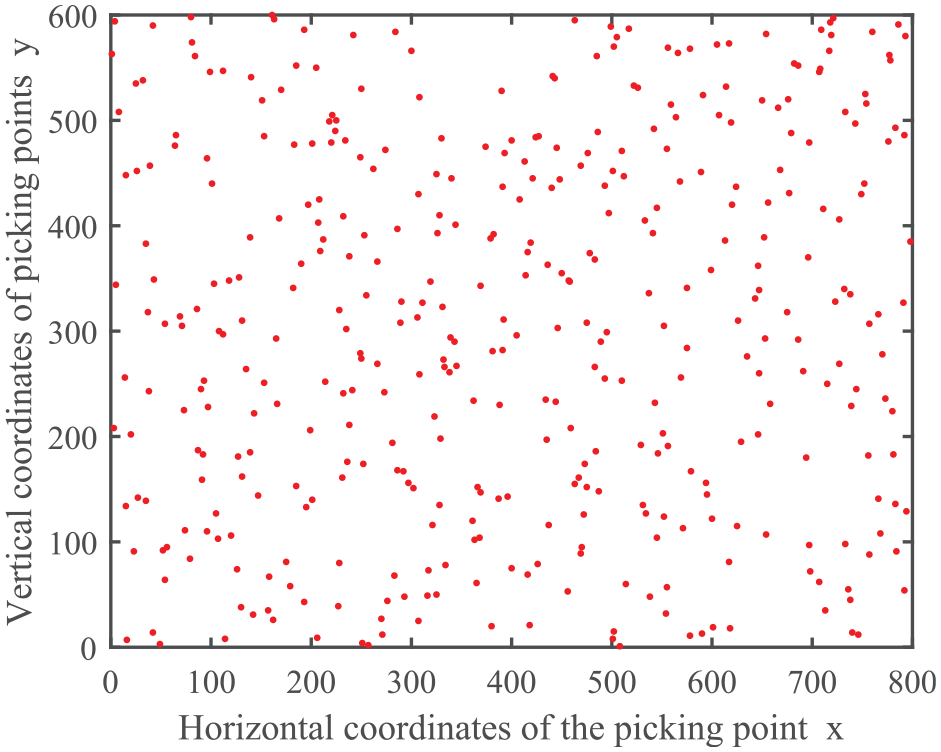
Distribution of coordinates location of tea picking points.
The objective of the TSP planning model is to minimize the total path length, subject to the following constraints: (1) all cities must be visited exactly once; (2) each city must be departed from exactly once; (3) the planned path must form a single loop covering all cities. To establish the mathematical model of the TSP problem, the following assumptions are made: the traveling salesman departs from city 1, visits cities 2, …,
Firstly, introduce the decision variables:
Then the objective function is:

Constraints:
(1) All cities must be visited and only once;

(2) Each city must be left only once;

(3) The planned path must only be a loop that covers all cities.

In the formula
In summary, the mathematical model of TSP problem is as follows:

Mathematical modeling of improved ant colony algorithm
When solving the TSP problem using the method of linear programing, the computational complexity increases explosively with the number of cities, resulting in a long calculation process which is not suitable for real-time planning in tea picking. Heuristic algorithms have shown good performance in addressing complex combinatorial optimization problems.
The ant colony algorithm, as a classic heuristic algorithm, has the following advantages in solving the TSP problem: (1) Parallelism and distributed computing: The essence of the ant colony algorithm is the collaboration of a large number of parallel and distributed intelligent agents (ants). This means that multiple ants can simultaneously search the solution space, thus accelerating the solution process. Compared to some traditional solving methods, the ant colony algorithm can conduct more effective parallel searches in the solution space. (2) Applicability to discrete optimization problems: The TSP problem is a typical discrete optimization problem, which requires finding an optimal solution within a limited choice space. The ant colony algorithm was initially designed to solve discrete optimization problems, making it well-suited for solving the TSP problem. (3) Adaptability and adaptive search capability: The ant colony algorithm has adaptability and adaptive search capability, enabling dynamic adjustment of the behavior of the ants and the pheromone update strategy based on the search results of the ants in the solution space. This allows the ant colony algorithm to better adapt to the characteristics and changes of the problem, and to possess strong search capabilities in the solution space. (4) Interpretability and scalability: The working principle of the ant colony algorithm is relatively simple and easy to understand and explain. Furthermore, the design and implementation of the ant colony algorithm are relatively flexible, allowing adjustments and extensions based on the specific requirements of the problem.
Research has shown 16 that the ant colony algorithm performs better in solving the TSP problem compared to genetic algorithms and simulated annealing algorithms. Hence, this paper adopts the ant colony algorithm to realize the path planning for tea picking points. Considering that the basic ant colony algorithm may not necessarily fit well with the practical requirements of tea picking path planning, this paper will make reasonable improvements to the ant colony algorithm based on actual needs.
Introduction to the basic ant colony algorithm
For the ant colony algorithm, the ants release pheromone on the road section they pass during foraging, and other ants that want to pass the road section feel whether they want to repeat the road section by judging the pheromone, so as to find a shortest path between the nest and the food source, 11 the variables and symbols in the ant colony algorithm are defined as shown in Table 1.
The definitions of all parameters.
In tea picking path planning, the total path is calculated by adding up the distances between points on the order of the planned path, and calculating the straight line distance between any two picking points.

After passing through all the tea picking points, the total path D is calculated cumulatively,

where

α is the pheromone importance factor; β is the heuristic function importance factor.
When the ant has traversed all the picking points once, the concentration of information connecting the points is:
where the value of the
Q represents the total amount of pheromone released by the ants cycling once;
In the picking robot path planning, the n process points in the

L is a closed path that accesses all picking points.
Mathematical model for improved ACO algorithm
Ant colony algorithm is widely used in optimal path planning because of its good robustness and fast optimization speed. The basic ant colony algorithm often falls into the predicament of local optimal solution and slow convergence speed during the search process. The pheromone volatility factor of the ACO algorithm
When
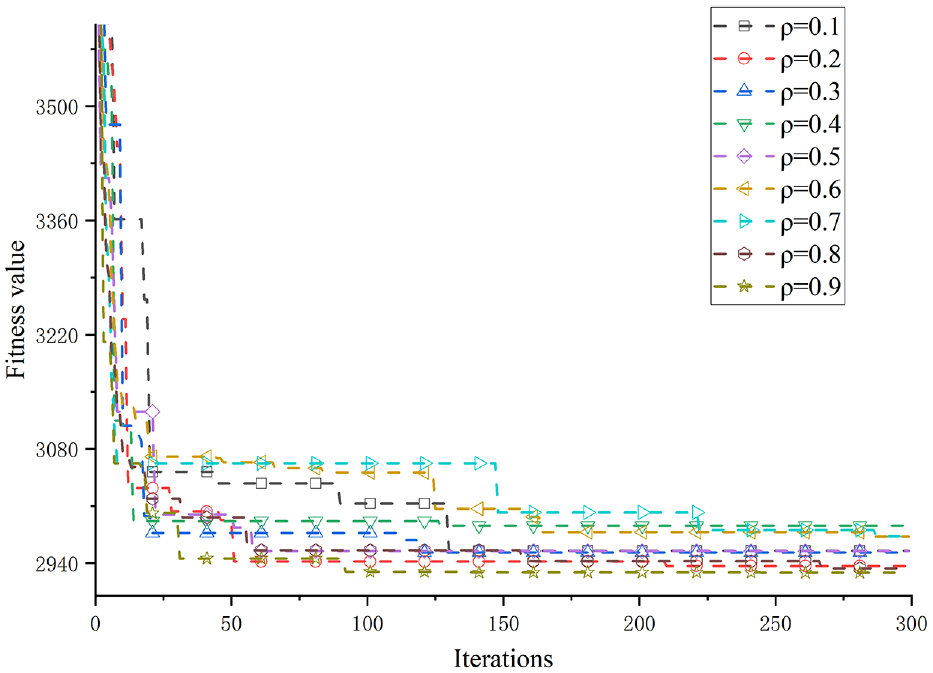
From the experimental results, it can be seen that when
In order to make it fit the actual situation of tea picking path planning well, this paper proposes to introduce the adaptive regulation mechanism into the pheromone volatilization factor:

where: a is lower limit of

In the formula:

where: i denotes the ith iteration, and

Eq:
The comparison between the ACA using adaptive volatility factor and the
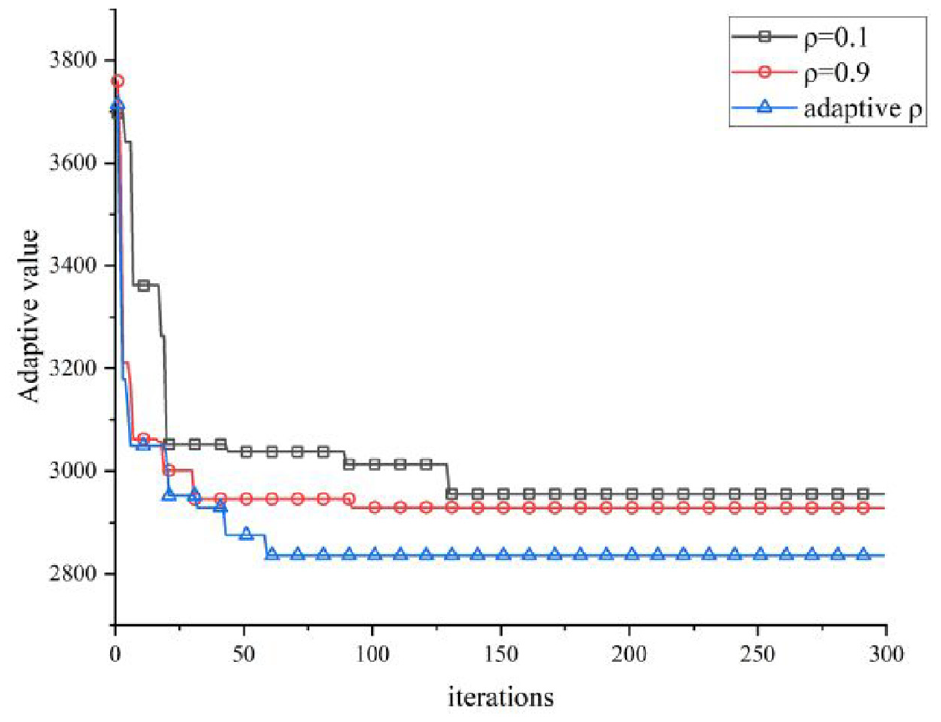
Comparison of adaptive ant colony and basic ant colony results.
From Figure 5, it can be clearly seen that the convergence speed of the adaptive ant colony algorithm is obviously faster than that of the basic ant colony algorithm, and it occupies an obvious advantage in the shortest path length. Improving the pheromone volatilization coefficient of the ant colony algorithm can effectively improve the practicality of the ant colony algorithm.
The specific algorithmic flow of IACA is as follows:
Build a planning environment model and import the acquired coordinate data of the picking points to be planned into the environment.
Initialize each parameter of the improved ant colony algorithm by zeroing the previous pheromone and emptying the stored information during the iteration process; set the number of ants m; the maximum number of iterations G; the pheromone importance factor α; the heuristic function importance factor β; the pheromone volatilization factor ρ; the pheromone sprinkled on each path after the ants have walked by Q and so on, with NC = 1.
Initialize ant locations and place ants randomly on picking points.
The ants select the next picking point according to the probability of equation (8) and update the contraindication table.
The shortest path is calculated according to equation (12) after the ants have visited all the picking points.
Updating the pheromone concentration on the path according to equation (13), the
Determine if NC is greater than G. If so, proceed to step 8, otherwise return to step 3.
Output the optimal path.
Path planning simulation and result analysis
Determination of the selection of the main parameters
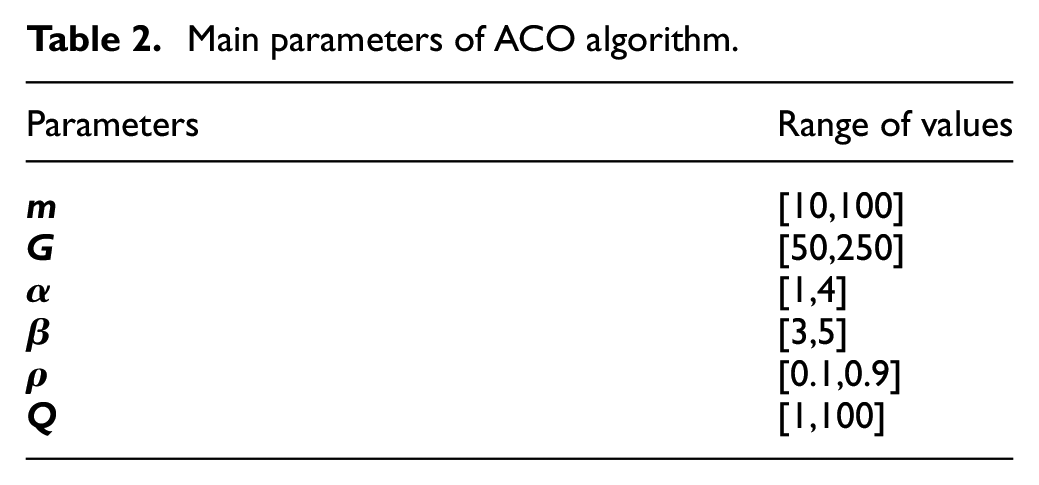
The main parameters of the ant colony algorithm are the number of ants
Main parameters of ACO algorithm.
In order to analyze the influence of a single parameter on the algorithm and determine the optimal values of the main parameters of the improved ACO algorithm, 50 picking points randomly selected from Figure 3 are used as a training group, and the default values of a group of parameters are set as follows: m = 50, G = 150, α = 2, β = 4, ρ = 0.5, and Q = 50. Only one parameter’s value is changed in each experiment, and the rest of the parameter’s values are kept the same as those of the default group.In order to minimize experimental errors, 20 experimental simulations of each group of parameters are conducted. reduce the experimental error, 20 experimental simulations were conducted for each group of parameters, and the average values of the 20 simulations were compared and analyzed. Firstly, the influence of the number of ants m on the shortest path length is determined. Under the default parameter conditions, the influence of the number of ants m on the planning results is simulated by the training group data, as shown in Figure 6:
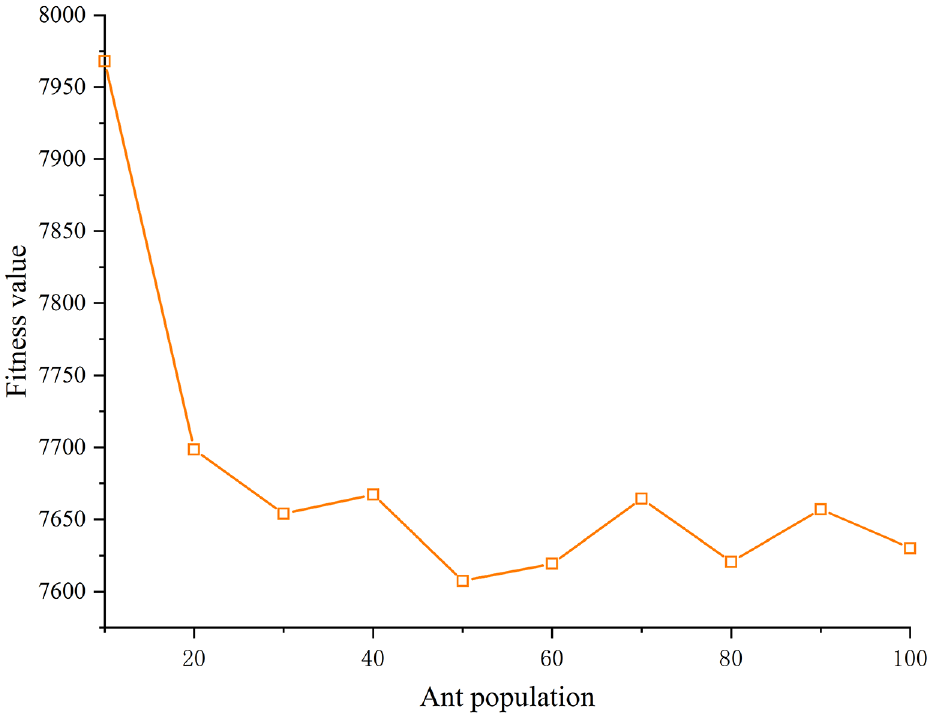
Trend of the planning results with the number of ants.
The experimental results indicate that with the rise of the number of ants, the shortest path decreases in general, when the number of ants is 50, the average shortest path length of the simulation experiment is the smallest, when the number of ants is more than 50, the planning result is slightly reduced but the more the number of ants, the larger the amount of computation, and the required planning time increases, which is not conducive to the rapid results, combined with Sun and Xin 11 and Wang et al. 12 can be understood that when the number of ants and the points to be planned When the number of ants is consistent with the number of points to be planned, the picking path planned by the ant colony algorithm is better. Therefore, the actual number of picking points in the area to be planned to improve the ant colony algorithm, m, should be set to the actual number of picking points in the area to be planned.
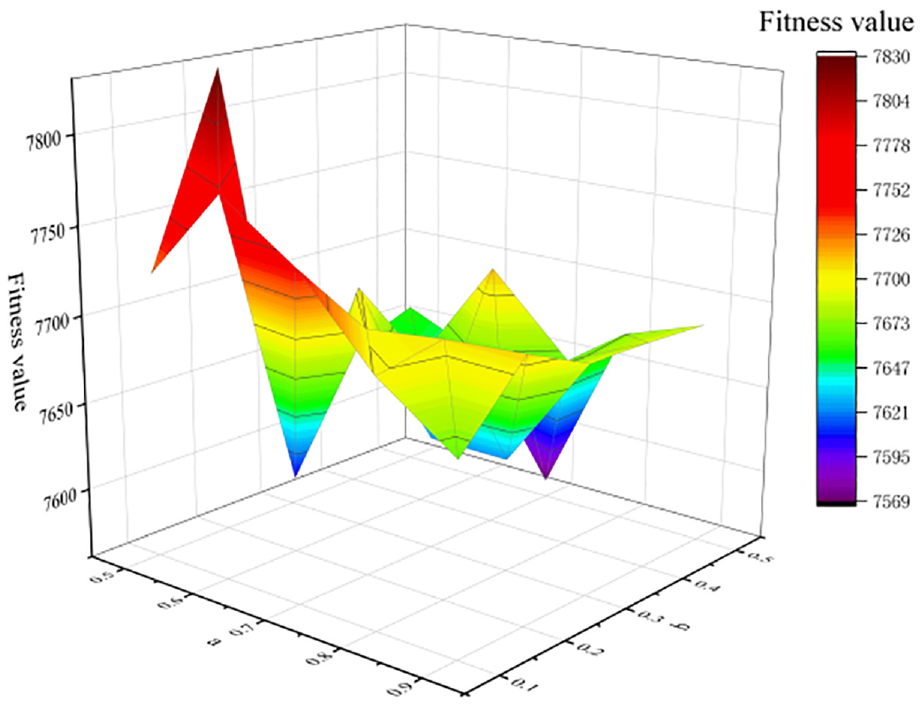
To determine the upper and lower limits of the pheromone volatilization factor in equation (7), take a ∈ {0.5,0.6,0.7,0.8,0.9}, b ∈ {0.1,0.2,0.3,0.4,0.5}, and the rest of the parameters were set according to the default conditions, and the results of the simulation experiment are shown in Figure 7.
Trend of planning results with the upper and lower limits of volatilization factors.
From the experimental results, it can be seen that the best results are obtained near a = 0.7, b = 0.5, so the upper limit of pheromone volatilization factor for the improved ACO algorithm is taken as 0.7 and the lower limit is taken as 0.5.
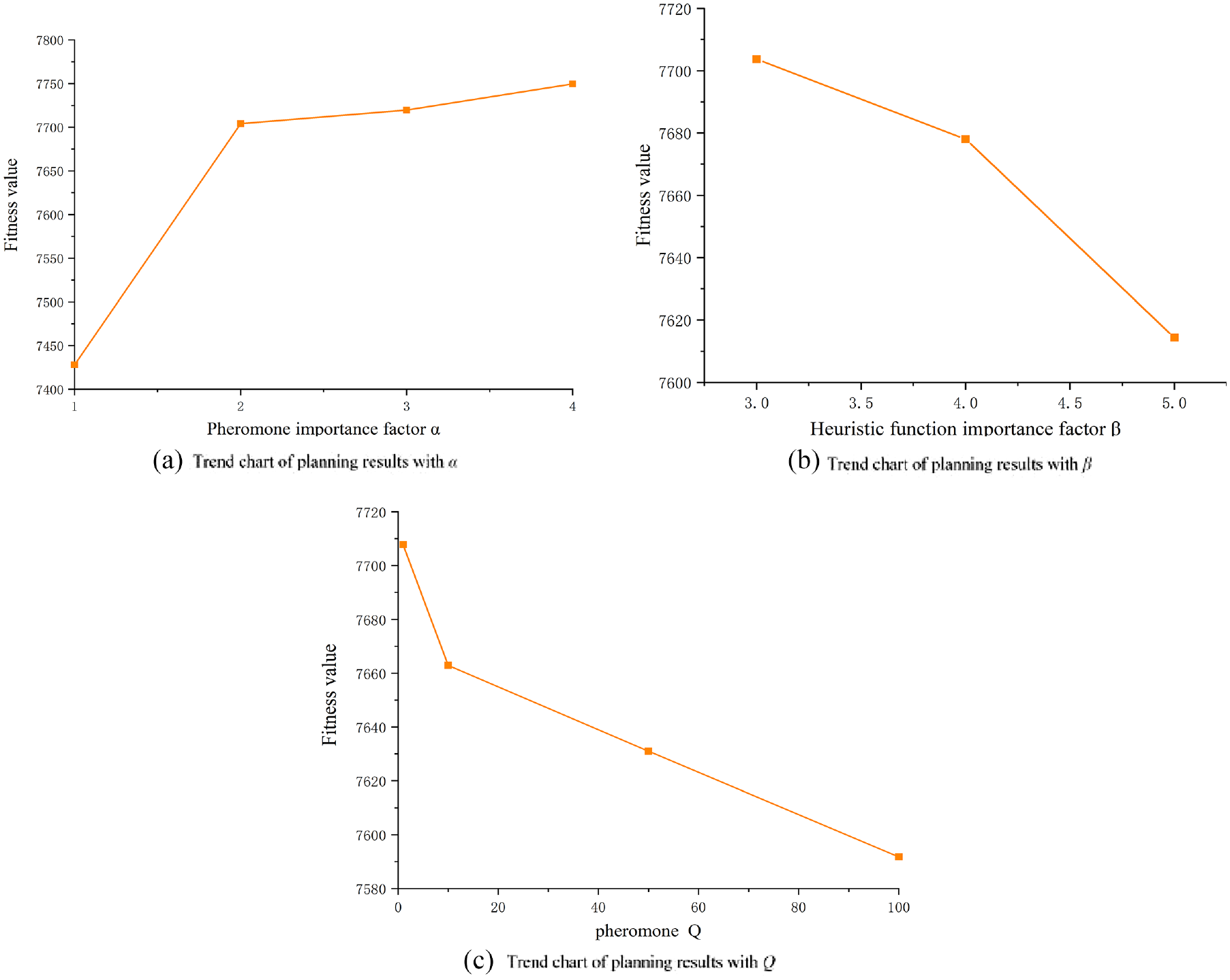
The optimal values of the remaining parameters of the improved ACO algorithm are determined on the basis of the previous work as shown in Figure 8:
Trend of planning results with each parameter of volatility.
The experimental results surface that the pheromone importance factor α achieves the best value near 1, the heuristic function importance factor β achieves the best value near 5, and the pheromone Q sprinkled on each path after the ants walk through achieves the best value near 100.
Because the growth of tea leaves is more uniformly distributed under natural conditions, in order to reduce the amount of computation, the total area containing 400 picking points in Figure 3 is divided into four small areas ABCD as shown in Figure 9, and each area contains roughly equal number of tea picking points, and path planning is carried out in each of the four areas, and the sum of the planning results of the four is approximated to replace the results of path planning in the total area, so that the effectiveness of the improved ACO algorithm is verified and compared and analyzed from the aspects of comparison of similar algorithm and comparison of different algorithms. The effectiveness of the algorithm is verified, and compared and analyzed from two aspects: comparison of similar algorithms and comparison of dissimilar algorithms.
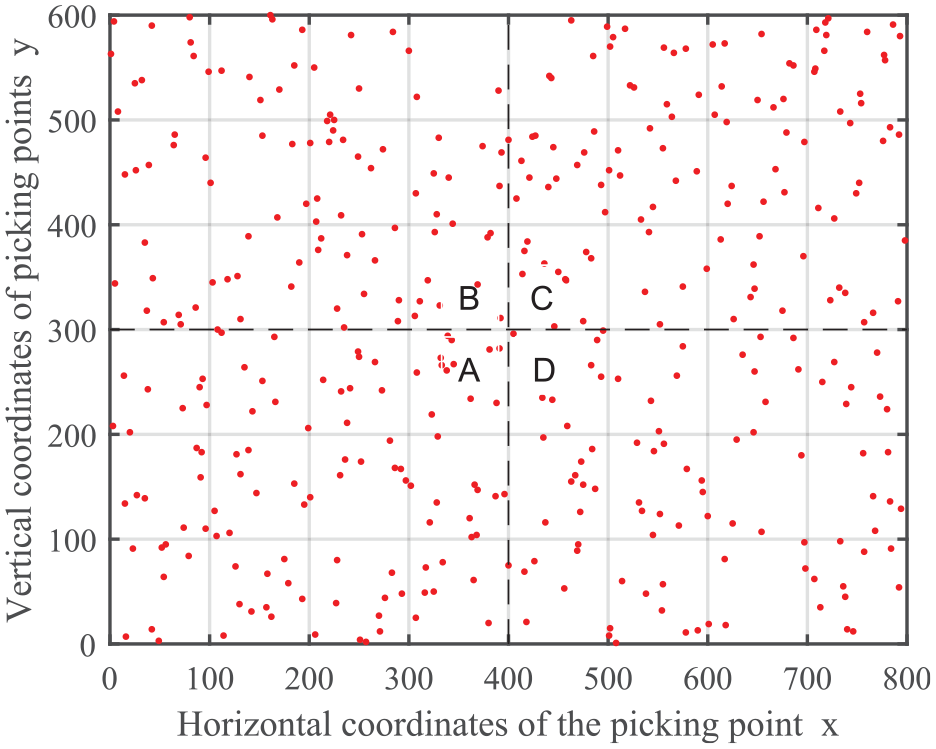
Distribution of picking sites in the ABCD IV region.
Methods involved in similar comparisons include the IACA algorithm in this paper, the ACA algorithm, the AACA algorithm in the literature, 18 and the KACA algorithm in the literature. 5 The parameters of the improved ACO algorithm were determined according to the above experiments, m was consistent with the actual harvesting points in each region, a = 0.7, b = 0.5, α = 1, β = 5, Q = 100; the basic ACO algorithm, ρ = 0.5, and the rest of the parameters were consistent with the improved ACO algorithm; and the parameter settings of the Adadelta-ACA algorithm and the KACA algorithm were consistent with those of the original references.
The methods involved in the heterogeneous comparison include IACA in this paper, SALAS algorithm in literature, 19 DEPSO algorithm in literature, 16 and HIGA algorithm in literature. 20 The parameters of the relevant algorithms are consistent with the original references.
Comparison and analysis of similar algorithms
IACA algorithm, ACA algorithm, AACA algorithm, KACA algorithm are used to carry out 10 simulation experiments of path planning with 400 tea coordinates in Figure 9 respectively, and the experimental results are shown in Figures 10–15 and Table 3. Figure 10 shows the comparison of the results of 10 experiments of the four methods of similar comparison, Figures 11–14 are the results of the shortest path planning visualization of the four regions of ABCD of the four methods, Figure 15 is the iterative convergence curves of the four methods, and Table 3 shows the statistical indicators of the 10 experiments of the four methods.
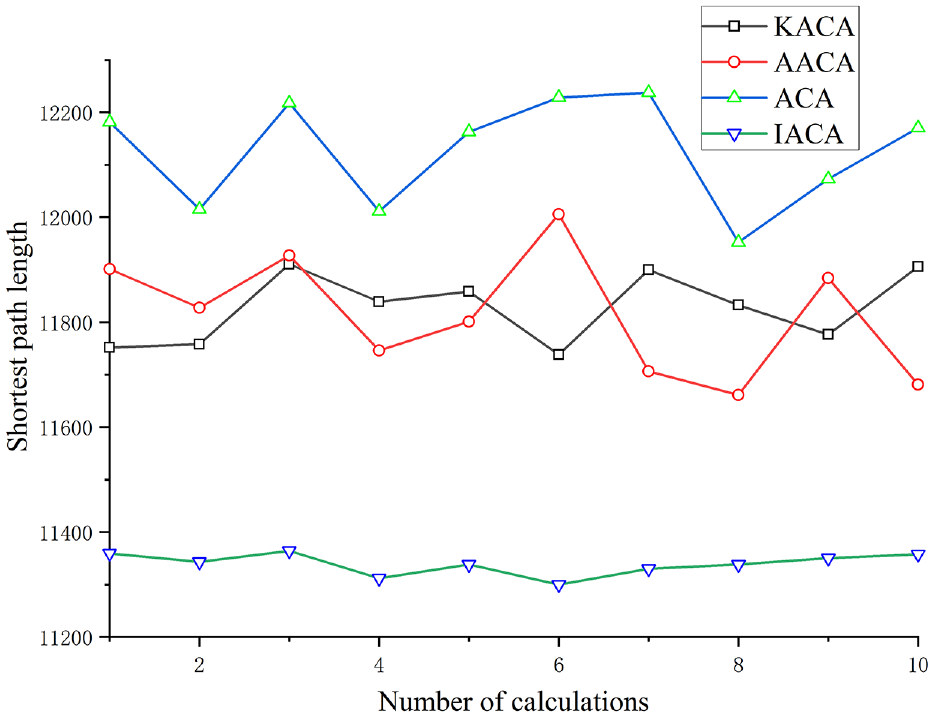
Comparison of the results of 10 experiments of four methods in the same class.
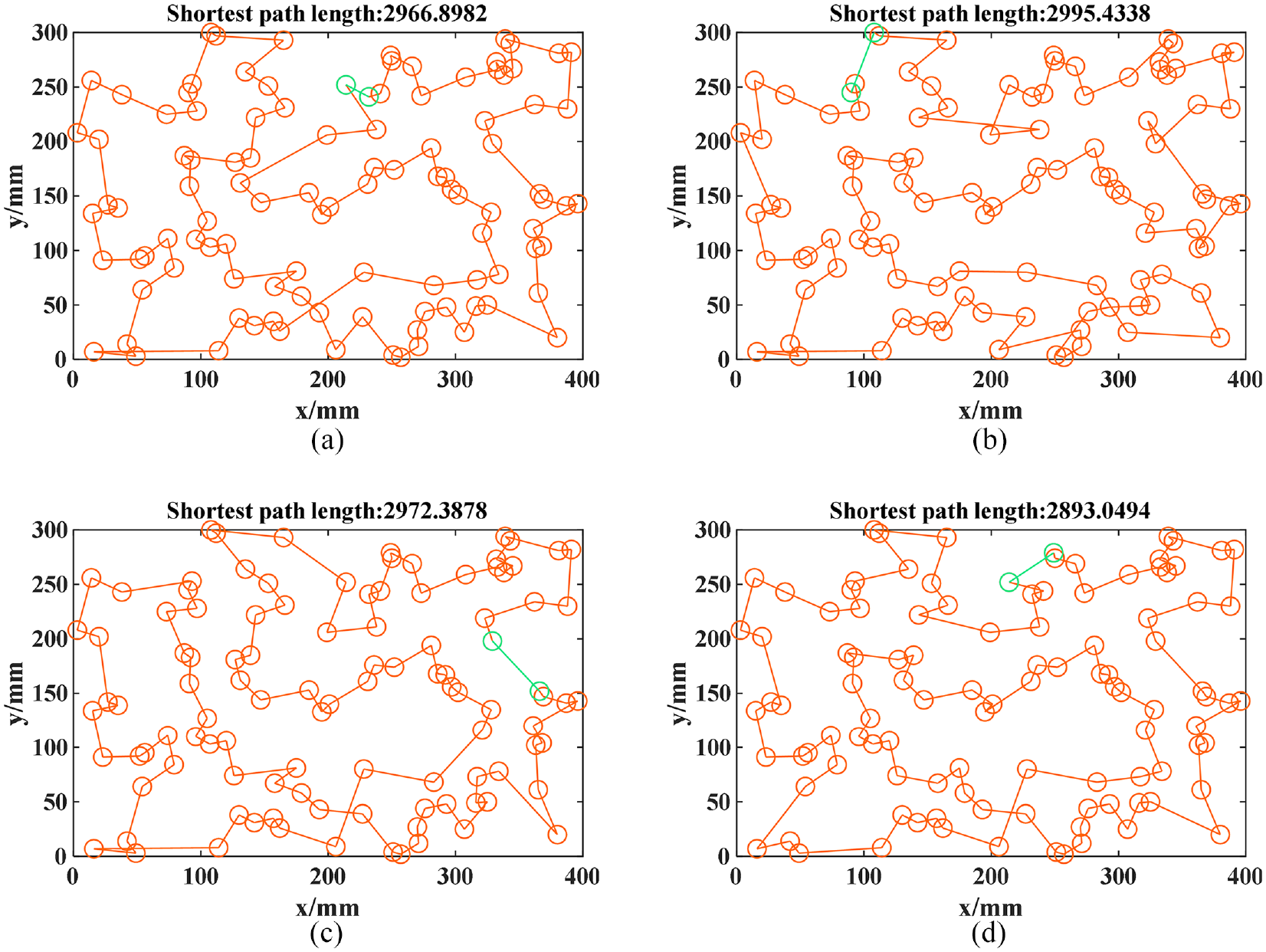
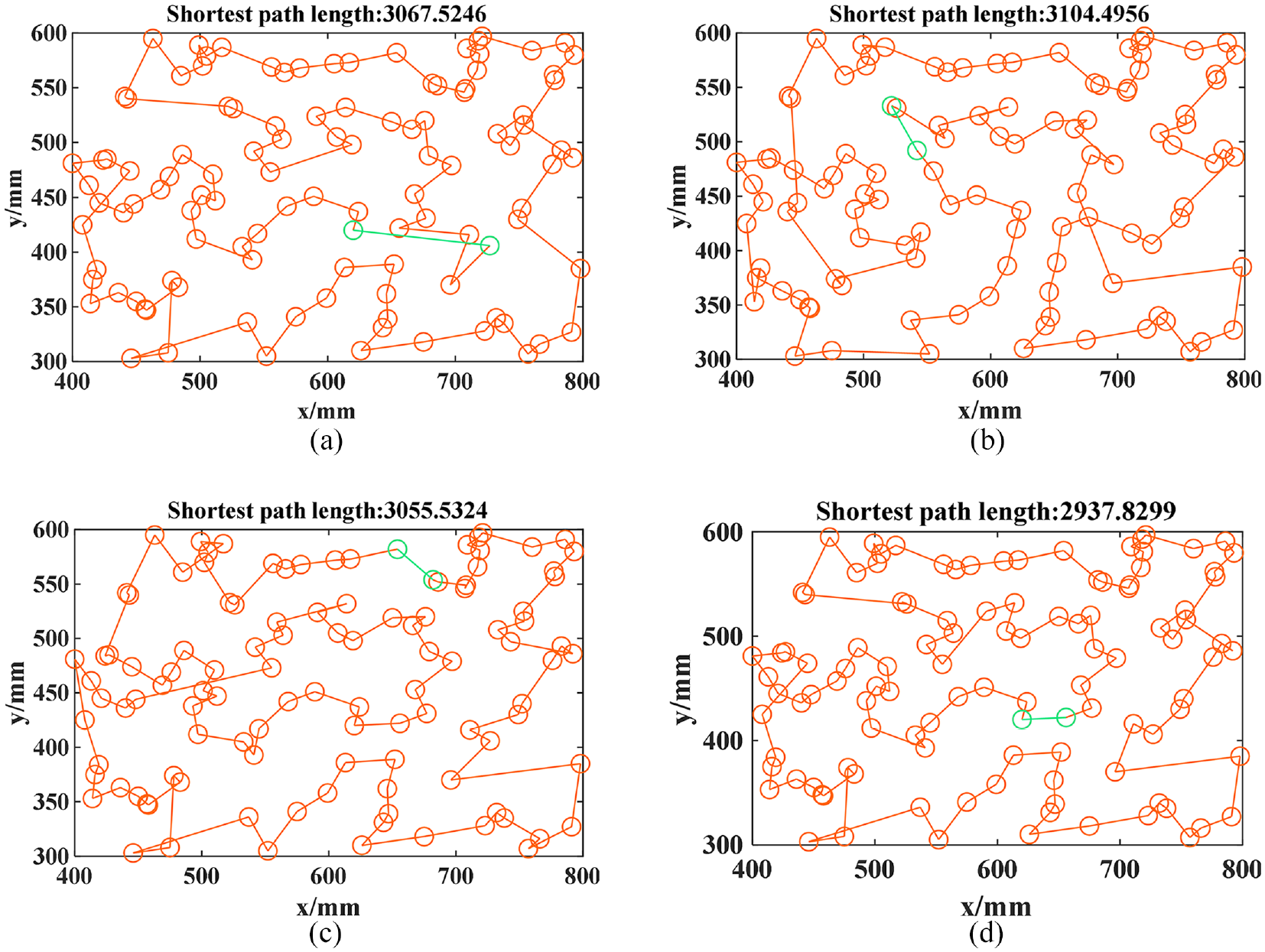
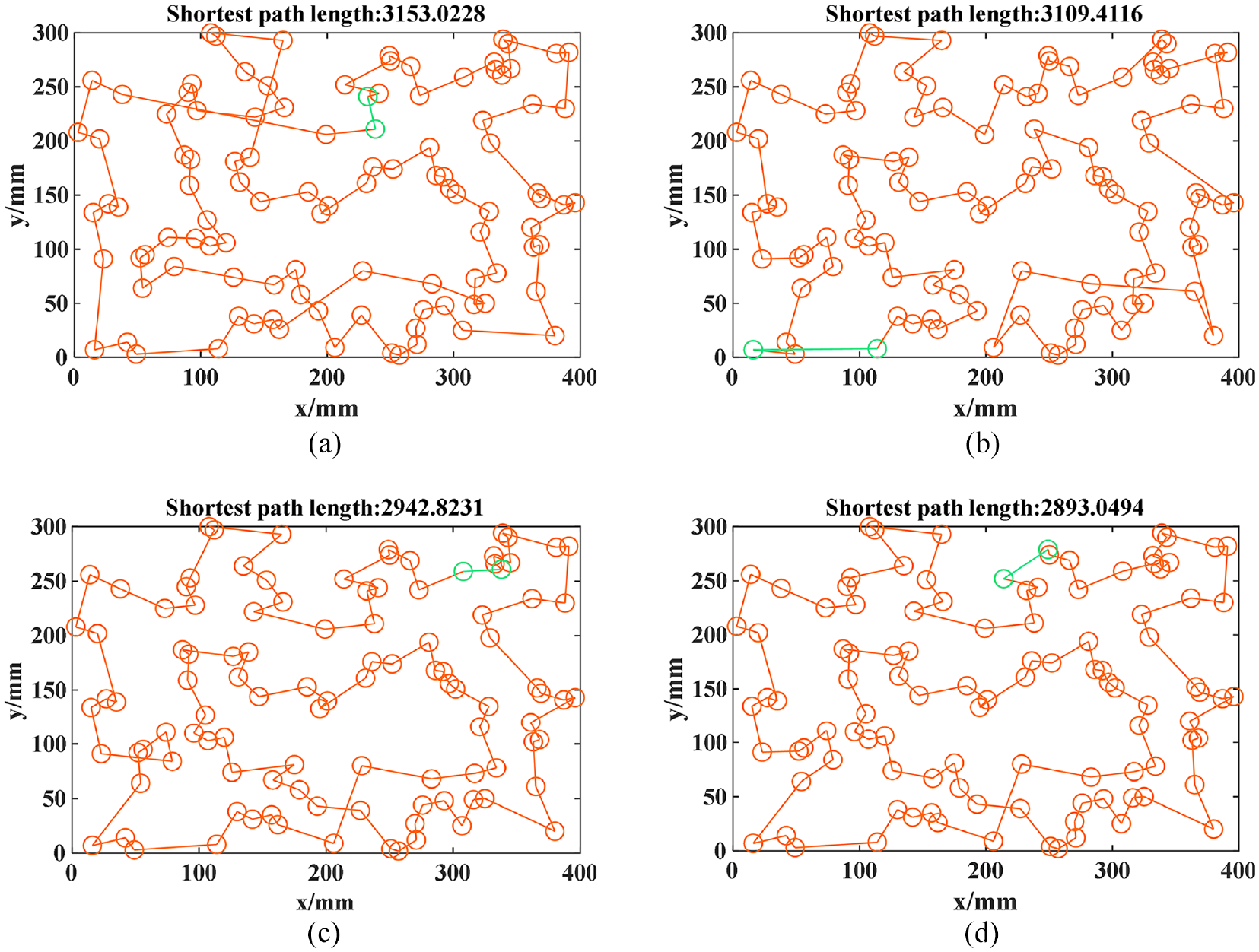
Shortest path planning results of the four methods compared with the same kind of area A: (a) KACA, (b) ACA, (c) AACA, and (d) IACA.
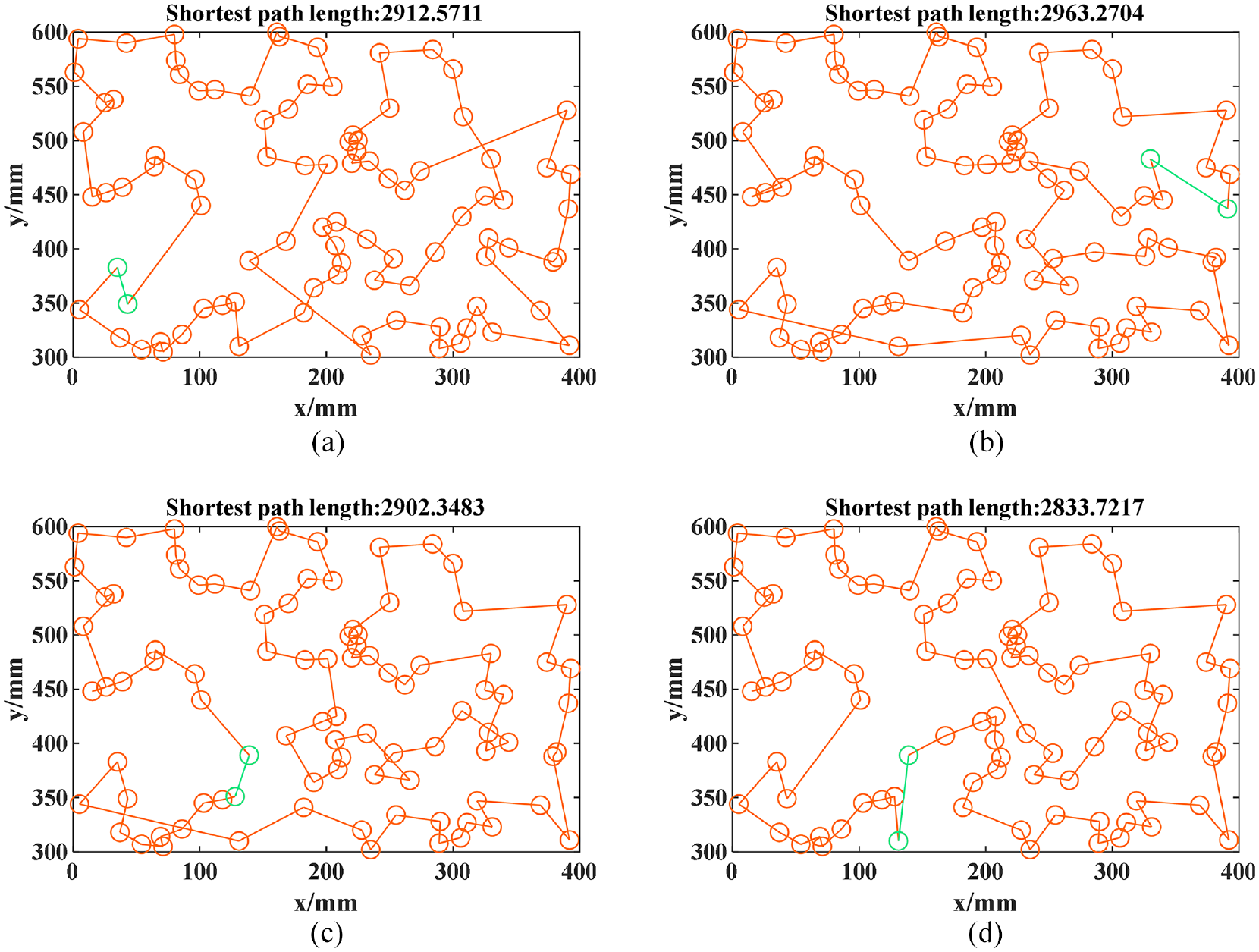
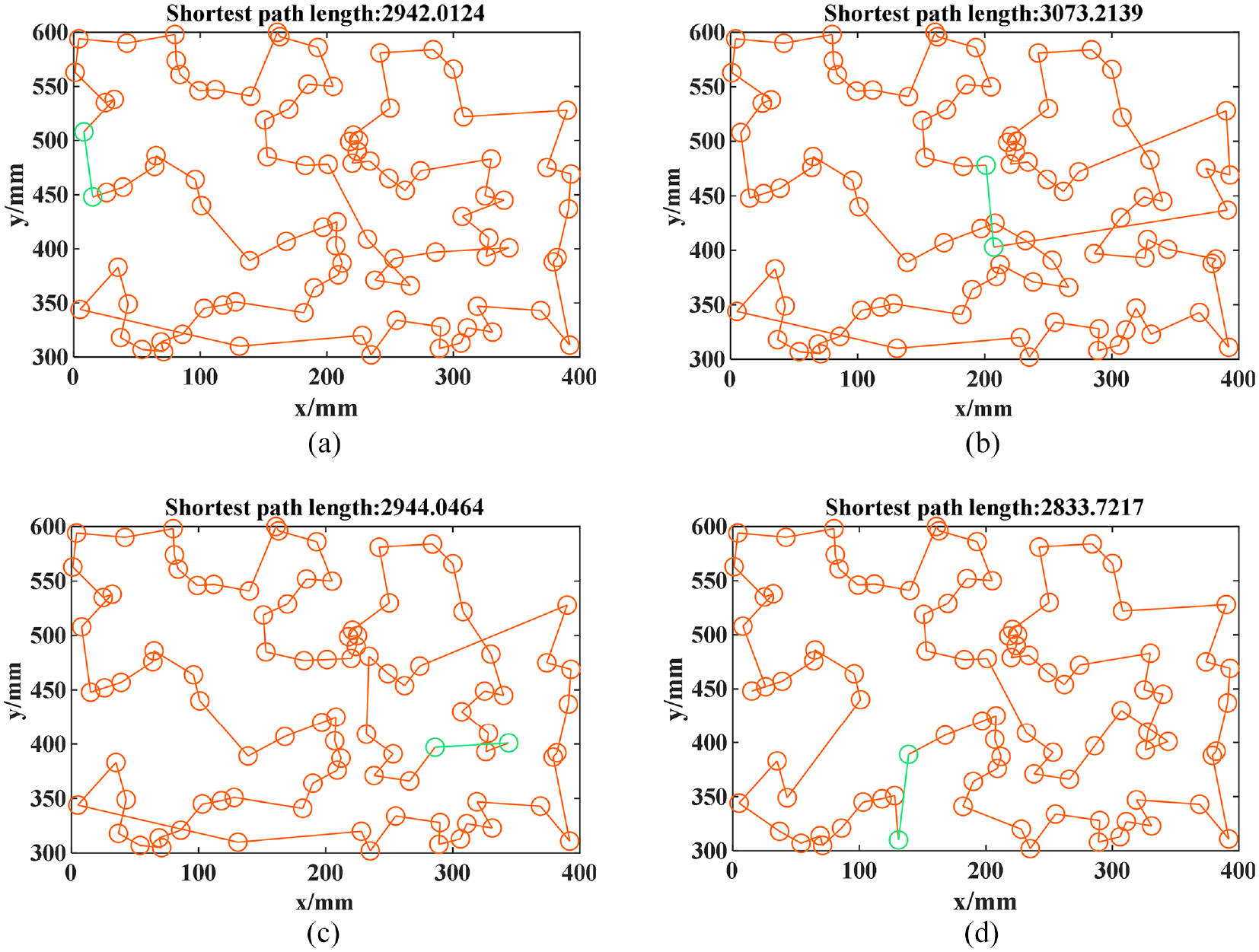
Shortest path planning results of the four methods compared with the same kind of area B: (a) KACA, (b) ACA, (c) AACA, and (d) IACA.
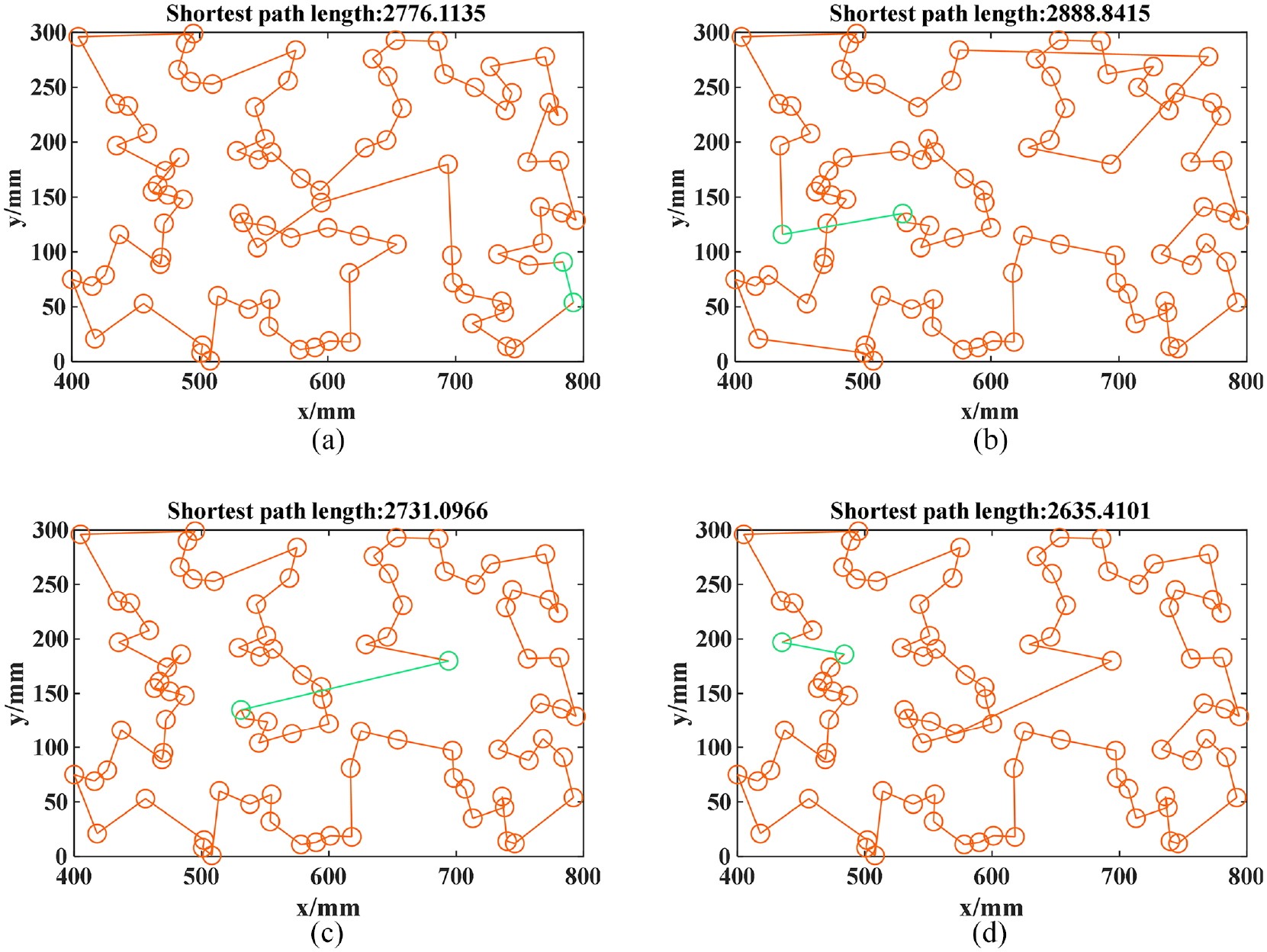
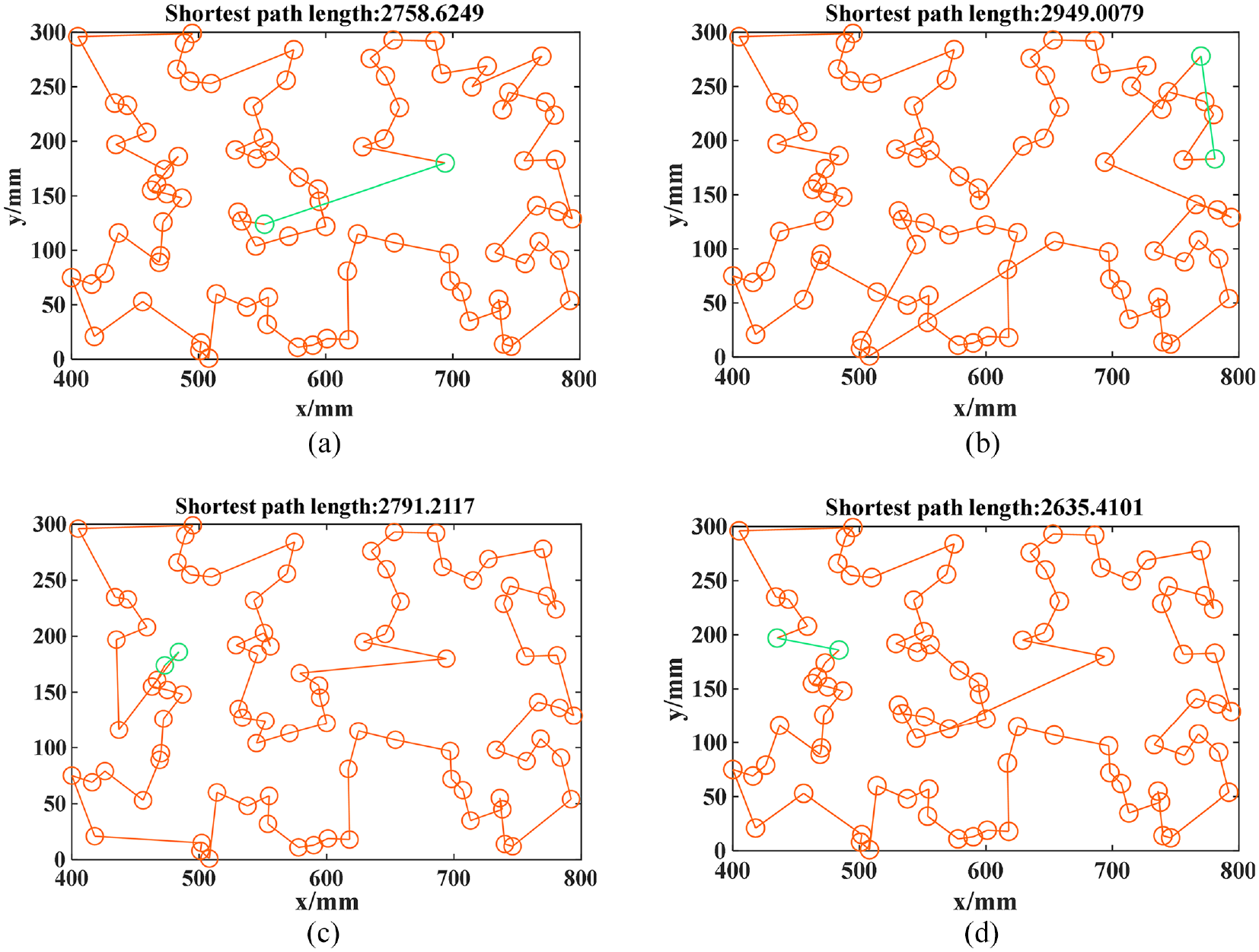
Shortest path planning results of the four methods compared with the same kind of area C: (a) KACA, (b) ACA, (c) AACA, and (d) IACA.
Shortest path planning results of the four methods compared with the same kind of area D: (a) KACA, (b) ACA, (c) AACA, and (d) IACA.
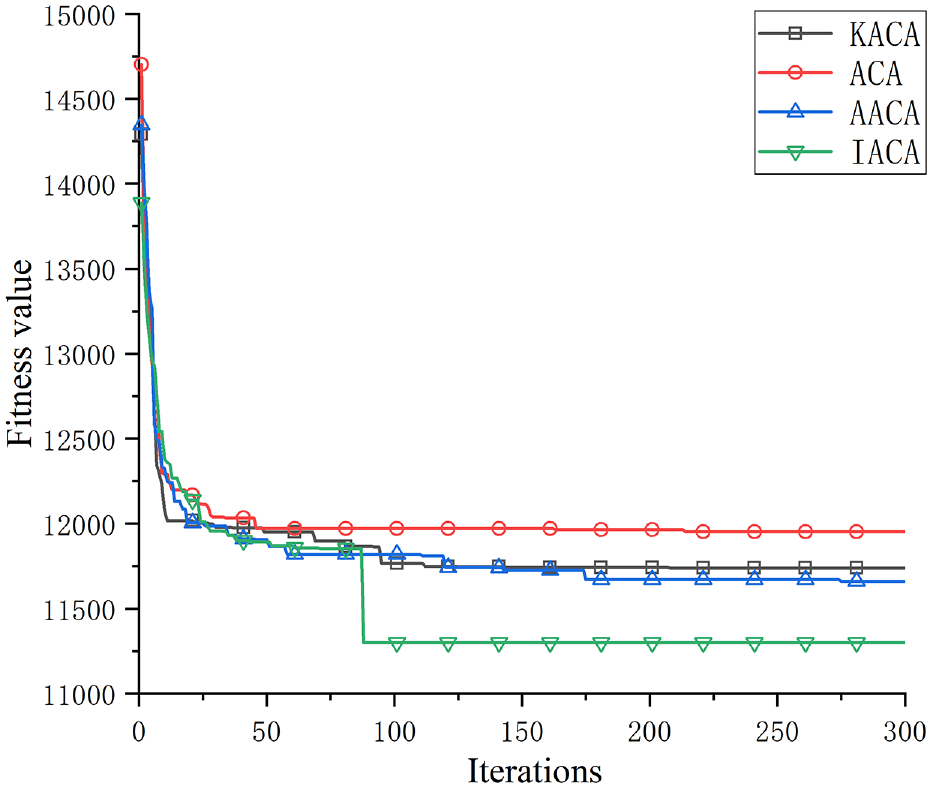
Iterative convergence curves of four methods for similar comparisons.
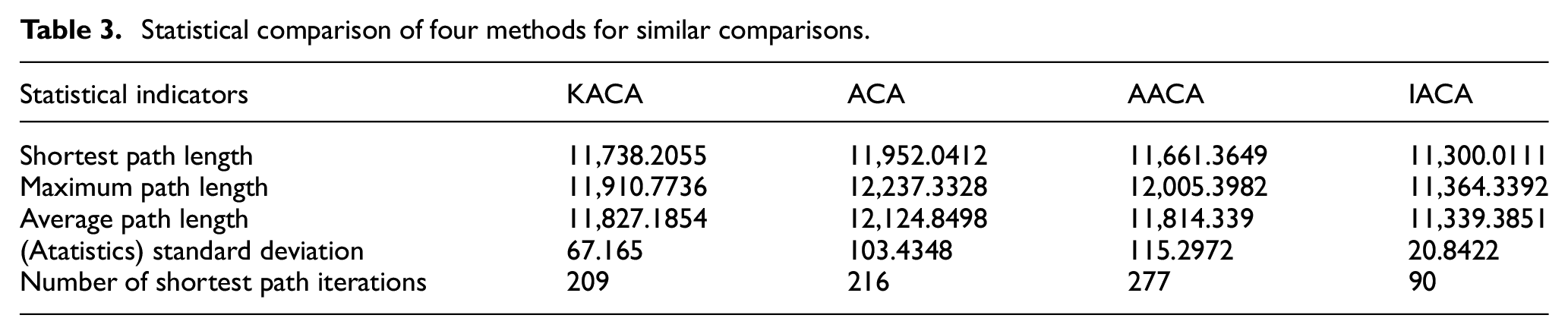
Statistical comparison of four methods for similar comparisons.
According to the positional relationship of the four methods in Figure 4, it can be seen that the ACA curve is at the top of the graph, KACA and AACA are in the middle, and the IACA proposed in this paper is at the bottom, which means that IACA is obviously due to the other three methods in terms of the results of the shortest path planning; from the degree of undulation of the curves, the degree of undulation of AACA and ACA is very drastic, KACA is the second, and the degree of undulation of IACA is the lowest, and it can be learned from Table 3 that in 10 experiments, the gap between AACA and ACA is large. The degree of ups and downs is the lowest. Combined with Table 3, it can be learned that in 10 experiments, the gap between the results of each experiment of AACA and ACA is large, and there exists the phenomenon of falling into the local optimal solution and failing to get the global optimal solution, while the degree of ups and downs of both IACA and KACA is relatively weak, and the gap between the results of each experiment is small, which has a more favorable stability.
The shortest path length (SPL) is the minimum value of the planning path length in
From the data in Table 3, it can be learned that in 10 experiments, on the shortest path length index, the IACA method of this paper is also 361.3538 mm shorter than the shortest path length of AACA among the other three methods, which is 4% better than KACA, 3% better than AACA, and 5% better than ACA; for the longest path index, the maximum path length of IACA of this paper is also For the longest path index, the maximum path length of IACA is also smaller than the minimum path length of the other three algorithms; in the average path length index, IACA is also better than the other three methods; the size of the standard deviation index reflects the stability of the algorithm results, and the standard deviation of ACAC is smaller than that of the other three methods, which indicates the stability of the algorithm is better than that of the other three algorithms; for the shortest path iteration index, the number of iterations needed to converge to the shortest path is higher in IACA than that of the other three algorithms. For the shortest path iteration number index, IACA converges to the shortest path with a smaller number of iterations than the other three algorithms, which indicates that IACA converges faster, does not fall into the local optimal solution, and is easier to search for the global optimal solution with a faster speed. From Figures 11–14, it can be seen that the paths planned by the IACA method have the least overlapping and the fewest number of iterations required to converge to the shortest path.
It can be concluded from the results of the above analysis that among the four methods of similar comparison, IACA is the best, AACA is the second, KACA is the third, and ACA is the worst. The main reason for the poor results obtained by the other three methods is that the change of pheromone distribution in the iterative process does not have a significant positive feedback effect on the ants, which fails to drive the ants’ desire to explore new paths in a result-oriented manner, resulting in a search that is prone to fall into local optimal solutions.
Comparison and analysis of dissimilar algorithms
IACA method, SALAS method, DEPSO method, HIGA method are used to conduct 10 simulation experiments of path planning with 400 tea coordinates in Figure 9 respectively, and the experimental results are shown in Figures 16–21 and Table 4.
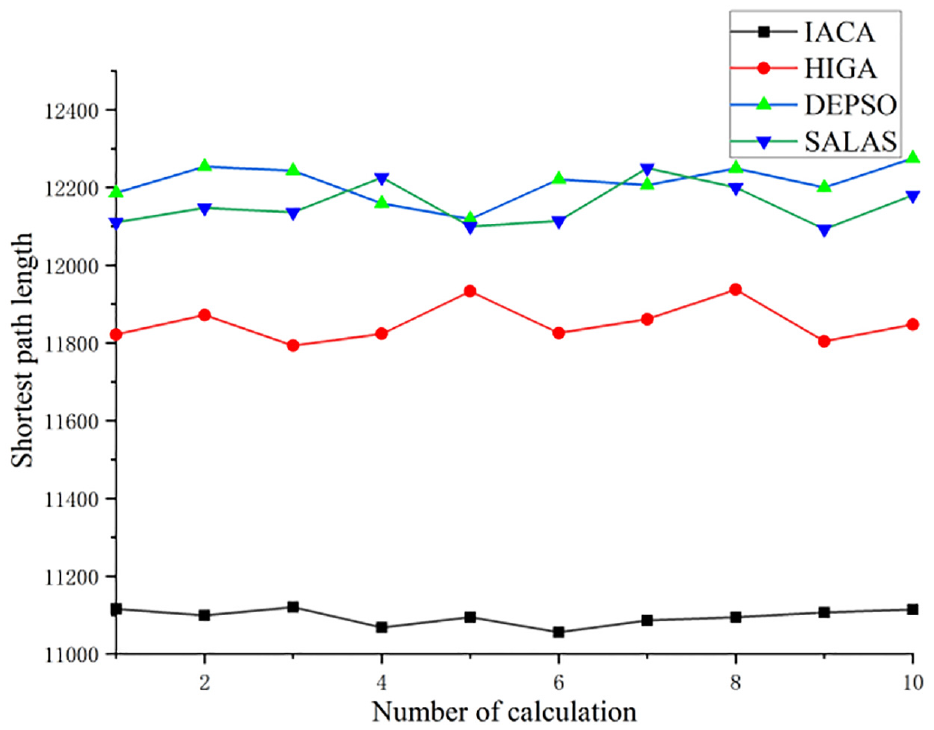
Comparison of the results of 10 experiments for the four methods of heterogeneity.
Shortest path planning results of the four methods compared with the dissimilarity in zone A: (a) DEPSO, (b) HIGA, (c) SALAS, and (d) IACA.
Shortest path planning results of the four methods compared with the dissimilarity in zone B: (a) DEPSO, (b) HIGA, (c) SALAS, and (d) IACA
Shortest path planning results of the four methods compared with the dissimilarity in zone C: (a) DEPSO, (b) HIGA, (c) SALAS, and (d) IACA
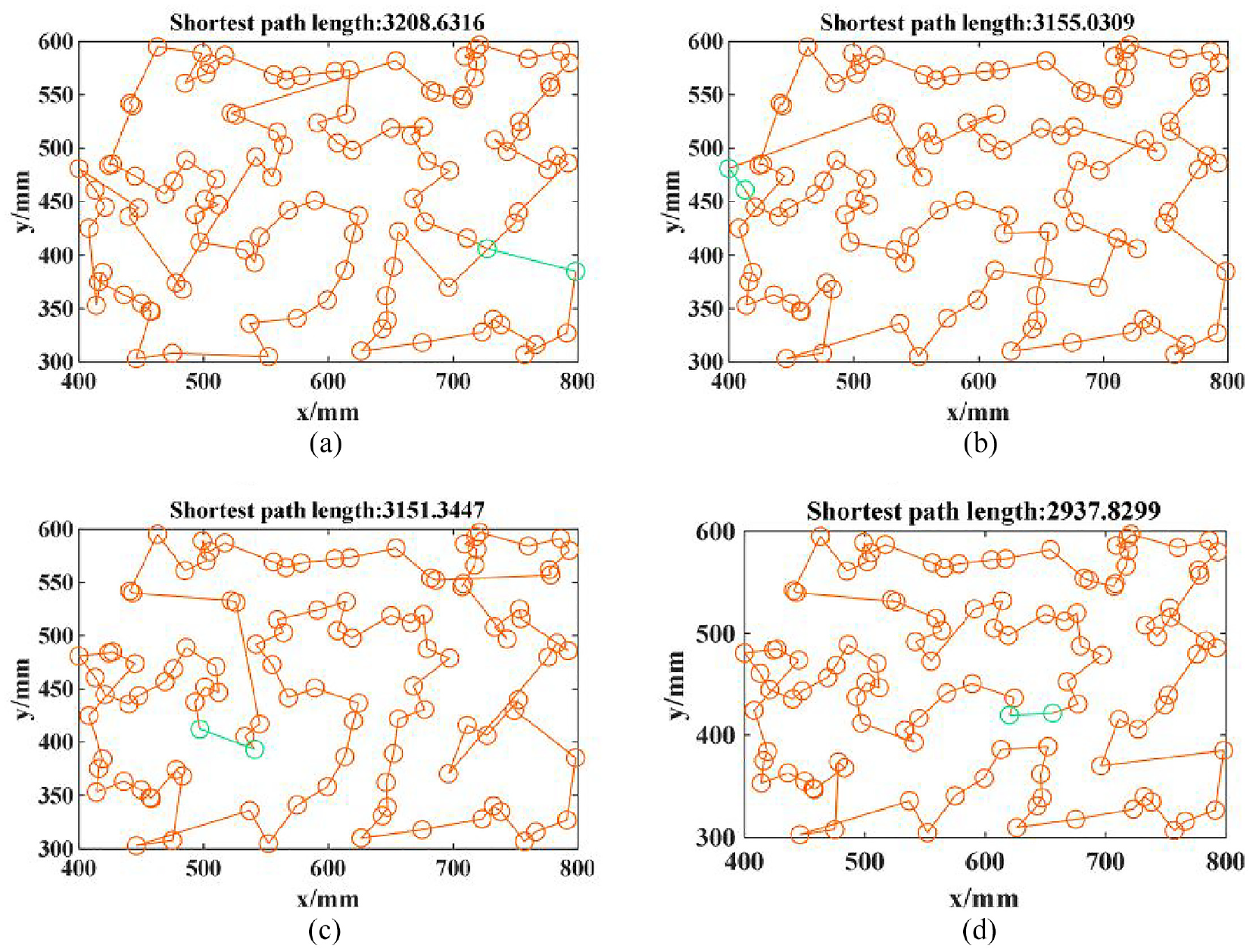
Shortest path planning results of the four methods compared with the dissimilarity in zone D: (a) DEPSO, (b) HIGA, (c) SALAS, and (d) IACA
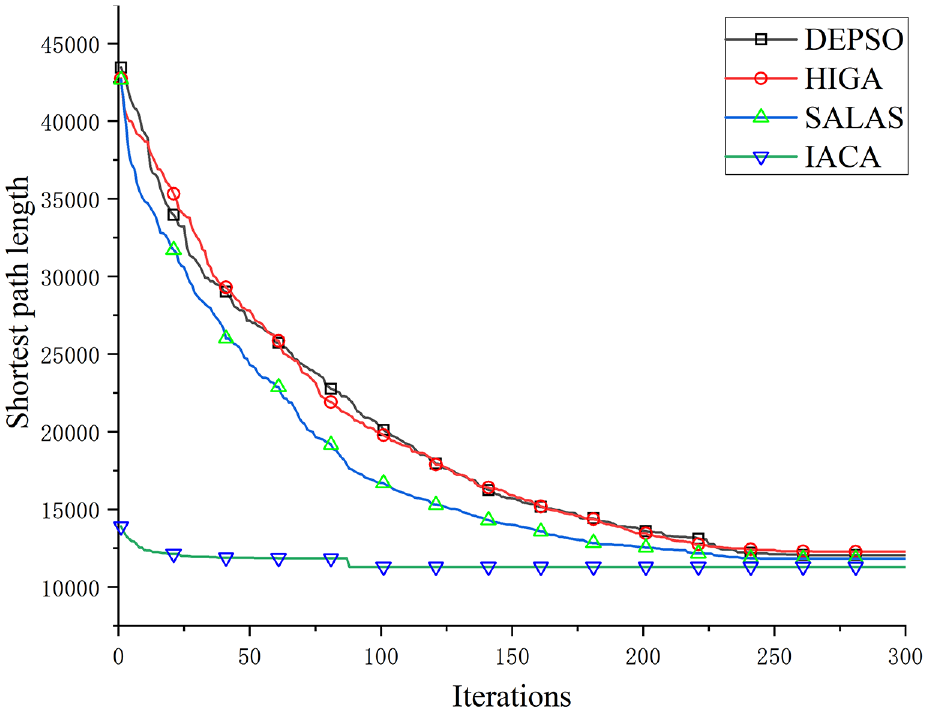
Iterative convergence curves of four methods for heterogeneous comparison.
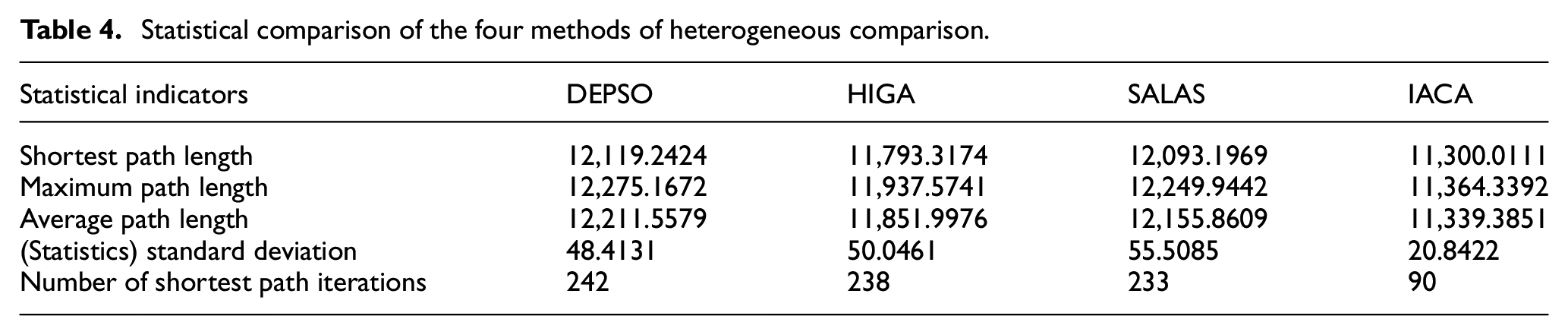
Statistical comparison of the four methods of heterogeneous comparison.
According to the positional relationship of the four methods in Figure 16, it can be seen that the curves of DEPSO and SALAS are at the top of the graph, HIGA is in the middle, and the IACA proposed in this paper is at the bottom, which means that the results of IACA in the shortest path planning results are obviously due to the other three methods; in terms of the degree of ups and downs of the curves, the degree of ups and downs of SALAS is more intense, followed by HIGA and DEPSO and IACA has the lowest degree of ups and downs. From the undulation degree of the curve, SALAS has a more drastic undulation degree, followed by HIGA and DEPSO, and IACA has the lowest degree of undulation. Combined with Table 4, we can learn that, in the 10 experiments, the gap between the results of each experiment of HIGA and SALAS is larger, and both of them fall into the phenomenon of local optimal solution and cannot get the global optimal solution, whereas the degree of undulation of both IACA and DEPSO are relatively weaker, and the gap between the results of each experiment is small, which has a more favorable stability.
The following conclusions can be obtained: from the results of path planning, the shortest path length obtained by IACA is significantly better than the other three methods, which is 7%, 4%, and 7% higher than the results of DEPSO, HIGA, and SALAS respectively, indicating that the path planning performance of IACA method is better; from the standard deviation index, the standard deviation of IACA is significantly smaller than that of the other three methods, indicating that the stability of IACA path planning is better; the number of shortest path iterations is smaller than that of the other three methods, indicating that the shortest path stability is better. From the standard deviation index, the standard deviation of IACA is significantly smaller than the other three methods, which indicates that the stability of IACA’s path planning is better; in the shortest path iteration index, the number of iterations needed for IACA to converge to the shortest path is smaller than the other three algorithms, and the time needed to get the shortest path is less, which proves that IACA’s planning efficiency is higher.
It can be concluded from the above analysis that among the four methods of heterogeneous comparison, the IACA method is the best, the HIGA method is the second, the DEPSO method is the third, and the SALAS method is the worst, and the main reason why the results obtained by the other three methods are poor is that the iterative process is affected by the initial solution, and the number of iterations required to converge to the optimal solution rises dramatically when the initial solution is poor, and it is easy to fall into the localized optimal solution. optimal solution.
Conclusion
In this paper, for the existing path planning algorithms with long shortest paths and long computation time, which cannot well meet the problem of accurate tea picking, an improved ant colony algorithm (IACA) with adaptive adjustment of pheromone concentration value applicable to robotic tea picking path planning is proposed. By introducing the adaptive adjustment mechanism into the pheromone volatilization factor, enhancing the positive feedback effect of the pheromone concentration on the algorithm, solving the problem that the basic ant colony algorithm is easy to fall into the local optimal solution and the convergence speed is slow, realizing the improvement to the basic ant colony algorithm, and applying to the field of tea picking path planning, and obtaining better experimental results.
Through simulation experiments, the shortest picking paths are planned for tea picking points in the four regions of ABCD, and the IACA method is compared with the three methods of KACA, ACA, and AACA for the comparison of similar algorithms, and with the three methods of DEPSO, HIGA, and SALAS for the comparison of dissimilar algorithms. The same kind of algorithm comparison experiments show that, in terms of shortest path length, the IACA method proposed in this paper is 5% better than ACA method, and 4% and 3% better than KACA and AACA improved ant colony algorithms respectively and the number of iterations needed to converge to the optimal path is reduced by more than 56% compared with the other three methods; the dissimilar algorithm comparison experiments show that the IACA method proposed in this paper enhances the results of DEPSO, HIGA, and SALAS by 7%, 4%, and 7%, respectively, over the results of the three methods in terms of shortest path length, indicating that the path planning performance of IACA method is better, and the number of iterations to calculate the shortest path is shortened by more than 60% compared with the other three methods, which indicates that the IACA method occupies a greater advantage in convergence speed; secondly, in the 10 repetitions of the comparison of similar and dissimilar methods, the standard deviation of the results of the IACA method are the smallest, it is more than 50% more stable than several other algorithms, and the graphs of the results of the IACA method are the smallest. The standard deviation of the results of the IACA method is the smallest, and the degree of graph fluctuation is small, which indicates that the computational results of the IACA method are more stable and reliable, and verifies the superiority of the IACA in terms of the planning results and the planning speed and stability.
In summary, the improved ACO algorithm has faster planning speed and shorter path length for the path planning of tea picking points, which can better fit the distribution of the large number of tea picking points and the complexity and variability of the distribution of tea picking points, and provides a faster and more accurate path planning method for the practical application of tea picking robots. In the subsequent research, we can combine the classification method to make the division of the picking point area more scientific or set more control algorithms to verify the performance of the calculation.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.