Aiming at the cooperative control problem of multi-agent system, the fixed-time containment control of general second-order multi-agent system under mismatched disturbances is studied. Firstly, the problem of multi-agent system fixed-time containment control in ideal state is analyzed, and a distributed control protocol based on variable structure control is proposed. Then, a nonlinear fixed-time disturbance observer is designed, aiming at the mismatched disturbance, and a fixed-time control protocol based on the nonlinear disturbance observer is proposed. Finally, the effectiveness of the proposed control protocol under switching topology and multi-source disturbance is verified by numerical simulation.
In recent years, with the rapid progress of computer technology and wireless communication technology, the control system is gradually developing toward the direction of large-scale, complexity and intelligence. The problem of multi-agent cooperative control has attracted the attention of many scholars, and a large number of research results have been formed in practical applications such as multi-robot cooperation,1,2 multi-motor cooperation3,4 and formation control.5,6 When there is only one leader or no leader in a multi-agent system, it is usually described as a consistency problem,7 that is, the control law is designed to make the multi-agent approach the same state.8,9
Containment control10 is an extension of the multi-agent system consistency problem in the multi-leader case, and its control objective is to let the multi-followers eventually converge to the region enclosed by the multi-leader under the action of the control protocol, and containment control is now widely used in areas such as UAV ensemble,11,12 missile tracking.13 To address the basic theoretical issues of containment control, Wang et al.14 considered feasible solutions for containment control of first-order multi-agent system in the presence of time lags. In Cui et al.,15 a neural network-based adaptive control strategy is proposed for the dichotomous containment control problem of multi-agent system.
The focus of the above studies is on the asymptotic containment control of multi-agent systems,16 that is, the convergence of the followers to the convex packet formed by the leader without an upper limit on the convergence time. However, the control requirements of real systems are often finite or fixed-time. Compared with asymptotic convergence, fixed-time convergence of multi-intelligent systems has more practical significance. More and more scholars are focusing on the study of fixed-time convergence of multi-agent systems,17–19 and Cheng et al.20 studied the fixed-time control problem of unmanned vehicle multi-agent formations under a first-order two-dimensional model. Iqbal et al.21 studied the first-order multi-agent body finite-time and fixed-time consistency problems under time-varying directed topology, and proposed distributed control laws and performed numerical simulations. The above studies focused on the convergence study of first-order multi-intelligent body systems, because the construction of Lyapunov functions for second-order and higher-order multi-agent body systems is more complicated.
Besides convergence, another issue worth studying is the control problem of multi-agent systems facing mismatched disturbances.22,23 Matching disturbances can be directly eliminated by feedback control because their input channels are parallel to the control quantities, while mismatching disturbances usually cannot be directly eliminated and are widely present in all kinds of practical systems. Therefore, it is of great practical significance to study the control problem under unmatched disturbance. Wang et al.24 studies the control strategy of second-order multi-agent system under random disturbance. In this paper, the final states of multi-agent tend to be consistent, but the problem of finite/fixed time convergence is not discussed. Yu et al.25 studies a multi-intelligent consistent finite control strategy based on adaptive control, but the upper limit of the disturbance must be known so the method has some limitations. In this paper, for multi-agent systems with multi-source mismatched disturbances, the matched disturbances and mismatched disturbances are directly estimated, and a fixed-time containment control law is designed.
The structure of this paper is as follows: Section 2, preliminary knowledge; Section 3, analysis of fixed-time containment control; Section 4, analysis of fixed-time containment control under mismatched disturbance; Section 5, numerical simulation; Section 6, Conclusion.
Preliminary knowledge
Algebraic graph theory
Let the nth-order weighted graph be denoted by . is the set of points in the graph, E is the set of edges, A is the adjacency matrix of the graph, and the connection weight between nodes and is denoted by . If , then G is an undirected graph (the adjacency matrix is a symmetric array), and vice versa, it is a directed graph (the adjacency matrix is an asymmetric array). is the degree matrix of G. The Laplacian matrix of G is defined as ,and the Laplacian matrix of the undirected connected graph is a symmetric matrix.
Related lemmas and definitions
Definition 1.26 Let , where . For , set . For , if is satisfied, then the function is r homogeneous, and the degree of homogeneity is k.
Lemma 1.26 ① Consider the system , if the system is homogeneous with respect to and the equilibrium points of and are globally asymptotically stable; If is satisfied, the system is stable in a fixed time at . ② when , , there must be a positive definite function , and is homogeneous with dilations , , and is negative and satisfied , is a positive real number, , .
Definition 2. Suppose that the set X is a subset of the vector space, and its convex hull is defined as .
Definition 3. Assuming that the multi-agent system can be characterized as ; m and n being the number of leaders and followers respectively, the adjacent matrix element , Laplacian matrix element and L matrix can be divided into blocks as .
Definition 4. is a set of neighbors of , in this paper if , , other wise .
Definition 5. In this paper , .
Definition 6. Let the vector of followers’ position is , the leaders’ is ; vector of followers’ velocity is , the leaders’ velocity vector is , is controller for followers. If can be established with , the containment control of followers is realized. In addition, if satisfy Lemma 1, the follower’s fixed time containment control is realized.
Definition 7. Consider a system , are observation of , are observation of ; When the observer design satisfies Lemma 1, the observation error , , , will approach zero at a fixed time`.
Fixed time containment control of second-order multi-agent system
The research goal of this paper is to use a variable structure control protocol to realize multi-agent fixed-time consistent containment control. The ideal model considering the second-order multi-agent system is
Where , n is the number of followers, m is the number of leaders. Position of the ith agent is , is the speed of the ith agent., is the control input for the ith agent. Without losing generality, leaders will move at a uniform speed, when , .The dynamic model of leaders can be expressed as follows
Assumption 1. The multi-agent system contains at least one directed spanning tree.
Remark 1. In order to simplify the expression, the symbols related to followers in this paper are denoted by the subscript “F,” such as ; Symbols about leaders are denoted by subscripts “L,” such as .
Assumption 2. Leaders communicate independently, the communication between leaders and followers is one-way, and the communication between followers is two-way. Agents share the state information and disturbance estimation information of neighboring nodes.
Lemma 2.27 If assumption 2 holds, of multi-agent system is positive definite, and the sum of the row elements of is 1.
Lemma 3.27, if , it means that the multi-agent system has achieved containment control.
To sum up, the control intention of this paper is to try to make in the sense of Lemma 1 and Lemma 2.
Define the position and speed tracking errors between the follower and the navigator as follows:
The control law is designed as follows:
where, is gain of controller, , , , , , , is the position tracking error between the ith and the jth agents, is the velocity tracking error between ith and the jth agents.
Remark 2. Traditional multi-agent system consistency control protocols are usually designed as follows28, . This is essentially a high-order sliding mode control, but its control parameters are difficult to determine, which is related to the boundary of system uncertainty.
Theorem 1. Consider multi-agent system (1) and (2) with n followers and m leaders. If assumptions 1 and 2 hold, the multi-agent system can achieve fixed-time containment control based on control law (4).
Proof. This part of the proof is divided into two steps: ① to prove that the closed-loop system is asymptotically stable under the control law; ② to prove that the multi-agent system satisfies the double-limits homogeneous theorem.
According to Lemma 2, of system (1) is positive definite. Defining the followers’ position tracking error as and velocity tracking error as , the matrix form of tracking error (3) can be expressed as follows.
Where , . Combined with equation (1), the dynamic equation of speed tracking error can be written as
Then choosing Lyapunov function as
Taking the first time derivative of V give
This means that the system is asymptotically stable at the equilibrium point . Further, , can be deduced from formula (5). Combining Lemma 1 and Lemma 2, it is known that the system can realize progressive containment control, and the detailed analysis is as follows.
Rewrite the system (1) into the following form and analyze its homogeneity.
Where, , . Homogeneity analysis of the nominal system (1) of the system (9) is as follows:
Let , yield
According to the definition 1, multi-agent systems (1) and (2) are homogeneous with , and the degree of homogeneity is .
Then, the second nominal system of the system (9) is analyzed for homogeneity, that is
Let , yield
According to the definition 1, the second nominal system of system (9) is homogeneous with , and the degree of homogeneity is .
Combined with the homogeneity analysis of nominal system of system (9) and Lemma 2, it is known that the multi-agent system (1) can realize fixed-time containment control by using control law (4).
Fixed-time containment control of multi-agent systems with mismatched disturbances
This section studies the fixed-time containment control problem of second-order multi-agent system under the condition of multi-source mismatch disturbance, and the corresponding followers system model is as follows.
where, , and refer to mismatched disturbance and matched disturbance respectively.
The leaders’ system model is as follows
where, .
Aiming at the problem that the followers of multi-agent system are interfered by multi-source mismatch disturbance, this paper first estimates the followers’ state information and disturbance information in fixed time by using nonlinear disturbance observer. Then combined with variable structure theory, a distributed control protocol with disturbance compensation is designed.
Nonlinear disturbance observer
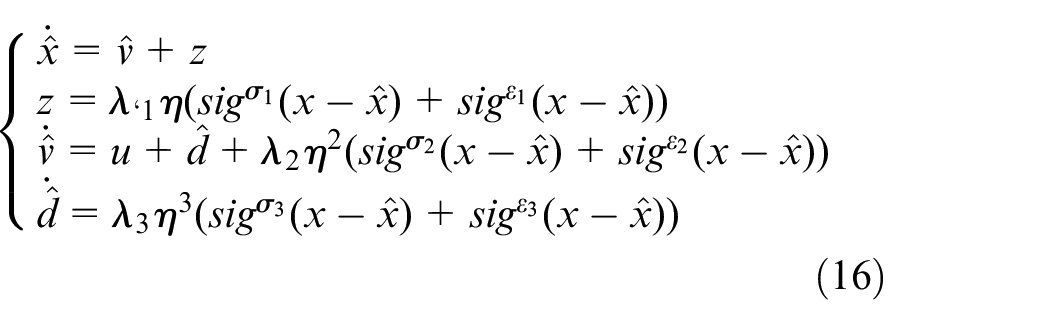
Lemma 4.29 For the system (13). The nonlinear disturbance observer is designed as follows:
, is a constant with a small value but greater than zero, , , , , , , , , is a constant greater than zero, the observer will converge in a fixed time.
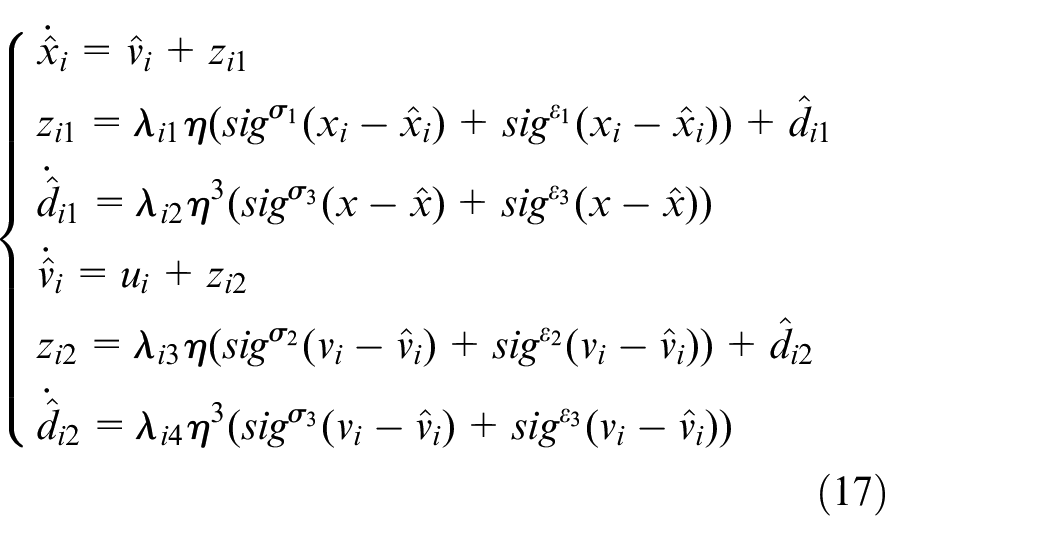
According to Lemma 4, a disturbance observer for followers is designed as follows:
where, and refer to the observed values of the position and speed of the ith follower, respectively, and refer to the observed values of matched disturbance and mismatched disturbance, are intermediate variables.
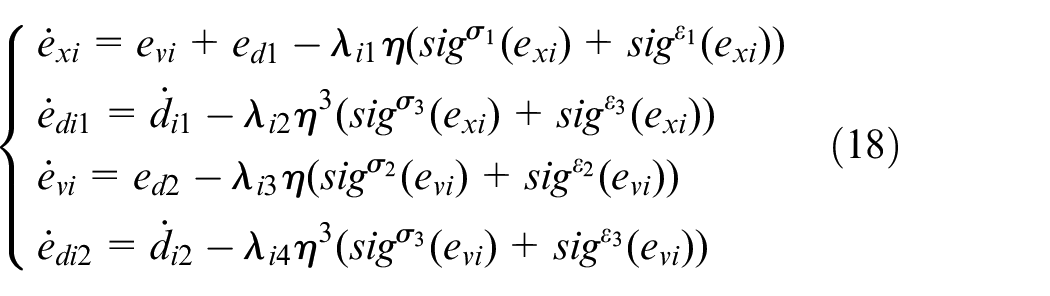
Define observation error , , , , It can be deduced from equations (13) and (16)
Define observation error , , , , It can be deduced from equations (13) and (16)
According to Lemma 4, the observer will converge at a fixed time when an appropriate is selected.
Design of compound distributed control law
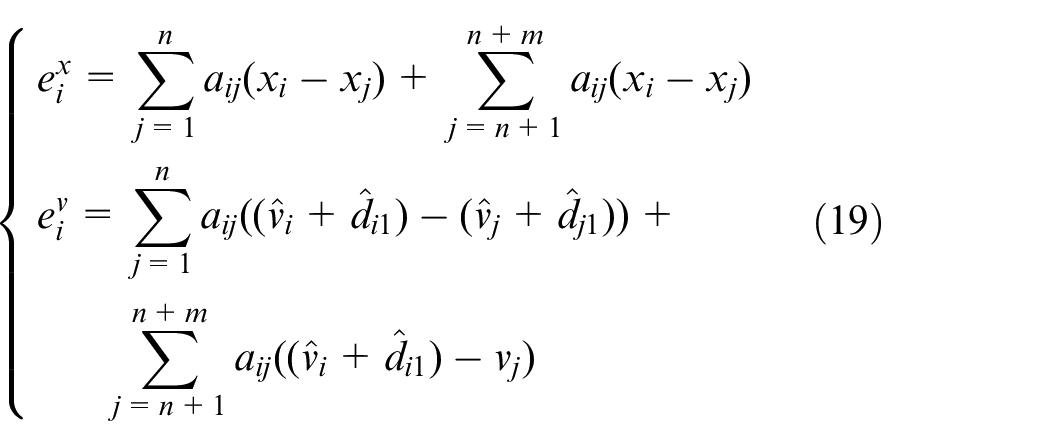
The tracking error between the follower and the navigator is defined as follows
According to the tracking error (18), the distributed control protocol is designed as follows:
Select the sliding surface as follows
The range of parameters in the above formula is the same as that in Section 3.
Theorem 2. For the multi-agent system described by system (12) and system (14), the control law (20) and the dynamic nonlinear sliding surface (21) can ensure that the initial state of the system is located on the sliding surface, and the fixed-time containment control can be realized.
Proof. This part of the proof is divided into two steps: ① Prove that the system converges to the sliding surface at a fixed time; ② Prove that the systems (12) and (14) can achieve fixed-time convergence under the action of the control law (20).
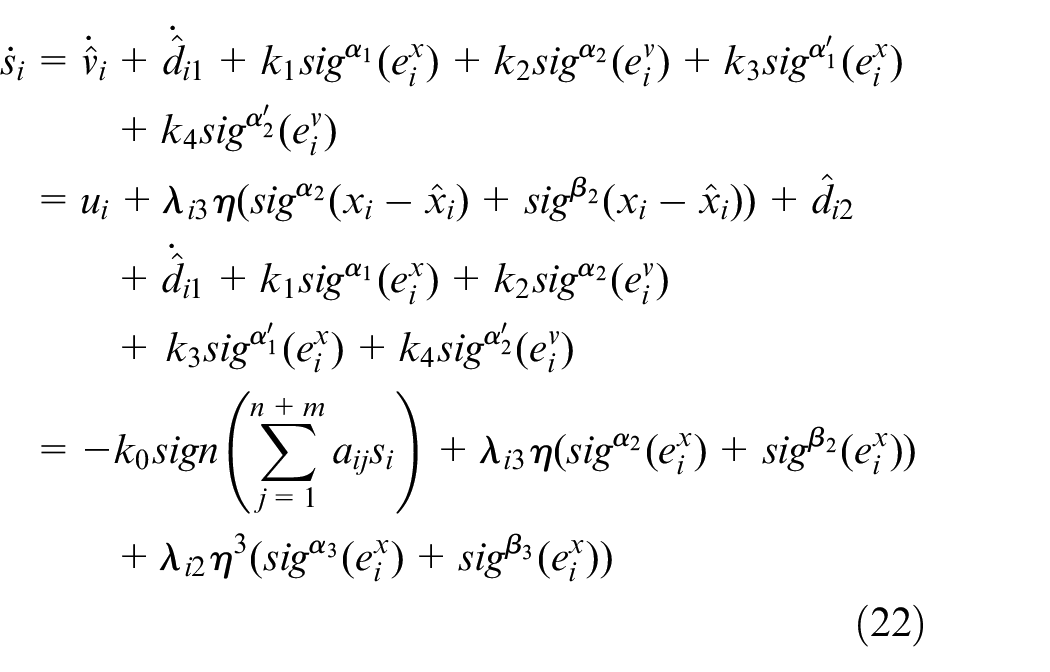
Derive the sliding surface and get
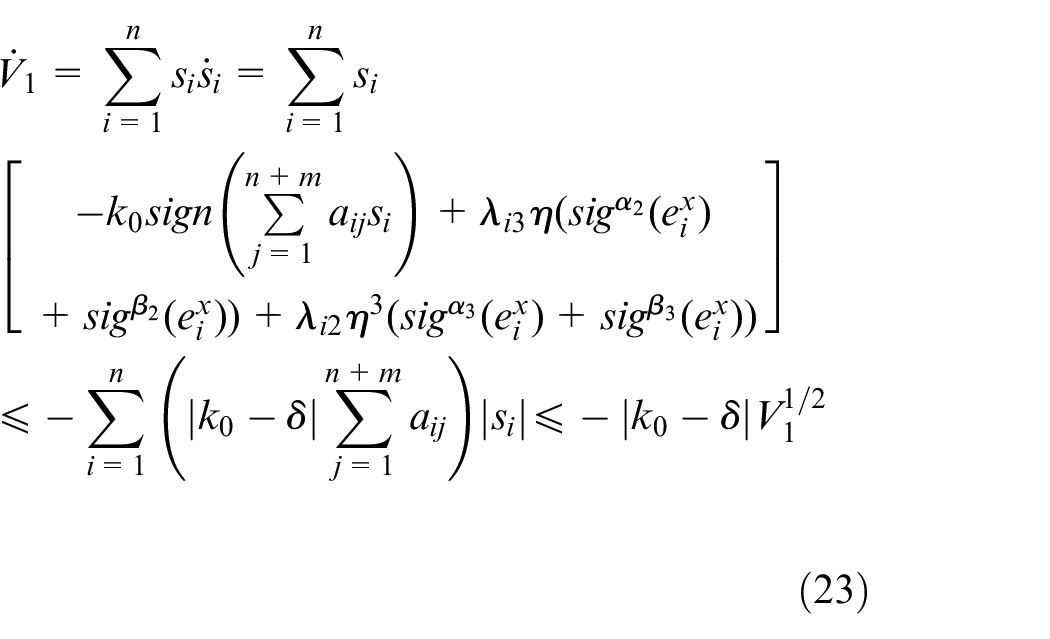
Choosing Lyapunov function , , and taking the first time derivative give
where, , According to the fixed-time observer (17), in a fixed time, is bounded, so must exist.
It can be seen from equation (23) that once is satisfied, the system state will converge to the sliding mode surface in a finite time . According to the finite time convergence lemma,30 is calculated as follows:
Therefore, the state of multi-agent system converges to the sliding surface at a fixed time, and the time is zero, that is, the system is on the sliding surface at the initial moment.
Rewrite the system (14) as:
Let the convergence time of the observer be , When the system time , , let , then , by taking equation (20) into equation (25), it can be deduced that
According to Theorem 1, the system (26) can realize fixed-time containment control under the action of control law (20).
According to Lemma 1, there must be a function , let , , , , , so there is . The convergence time is estimated in two cases.
1) when ,
The convergence time can be deduced from equation (29).
2) when ,
The convergence time can be deduced from equation (31) .Therefore, the total time of system convergence .
Numerical simulation
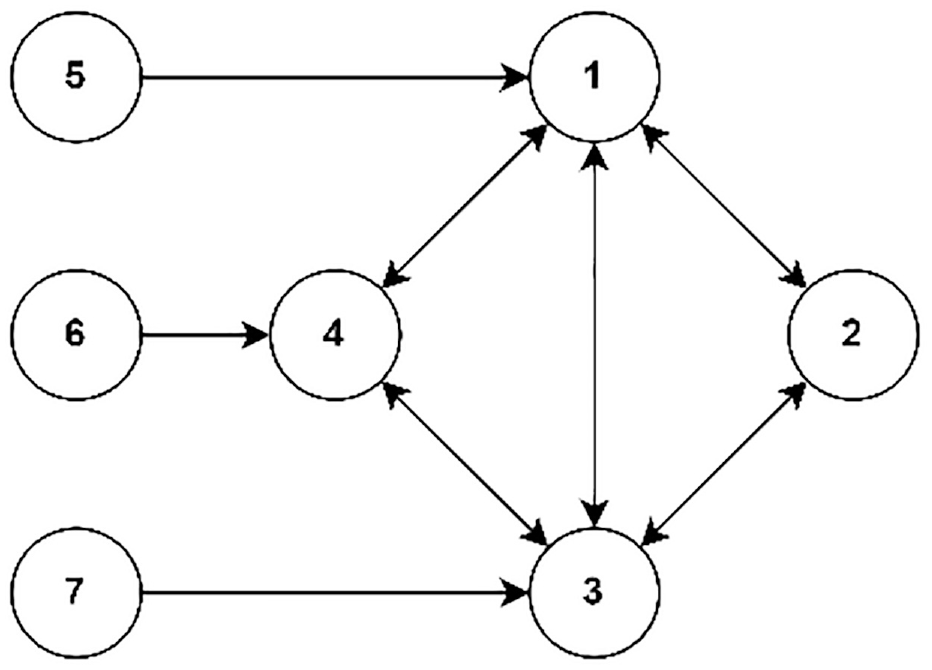
Considering a multi-agent system composed of four followers and three leaders, and the topology is shown in Figure 1.
Topology of multi-agent system.
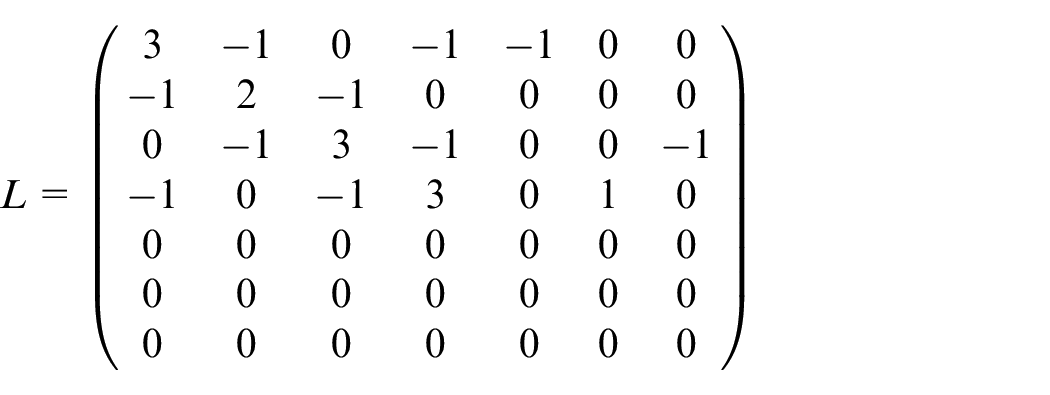
In Figure 1, nodes 1–4 are followers who receive information, and nodes 5–7 are leaders who send information. Laplacian matrix of the above topology as follows:
Assuming that all four followers are disturbed, represents the mismatch disturbance of the ith follower and represents the matching disturbance of the ith follower.
, ; , ; , ; , . The key parameters of the control law are ; The disturbance observer parameters are as follows .
The initial coordinates of agents are set as follows , , , , , , . The initial speed of followers are zero, and the initial speed of leaders are , , . The total duration of numerical simulation is 10 s.
In order to further illustrate the superiority of the method proposed in this paper, the control method proposed in Cheng et al.20 extended to containment control, and the observer proposed in Yang et al.31 is used as a comparison. The corresponding observation are shown below, are observed values obtained by the observer proposed in this paper, and represent the error of the observer proposed in this paper; and represent the response value of comparative literature.
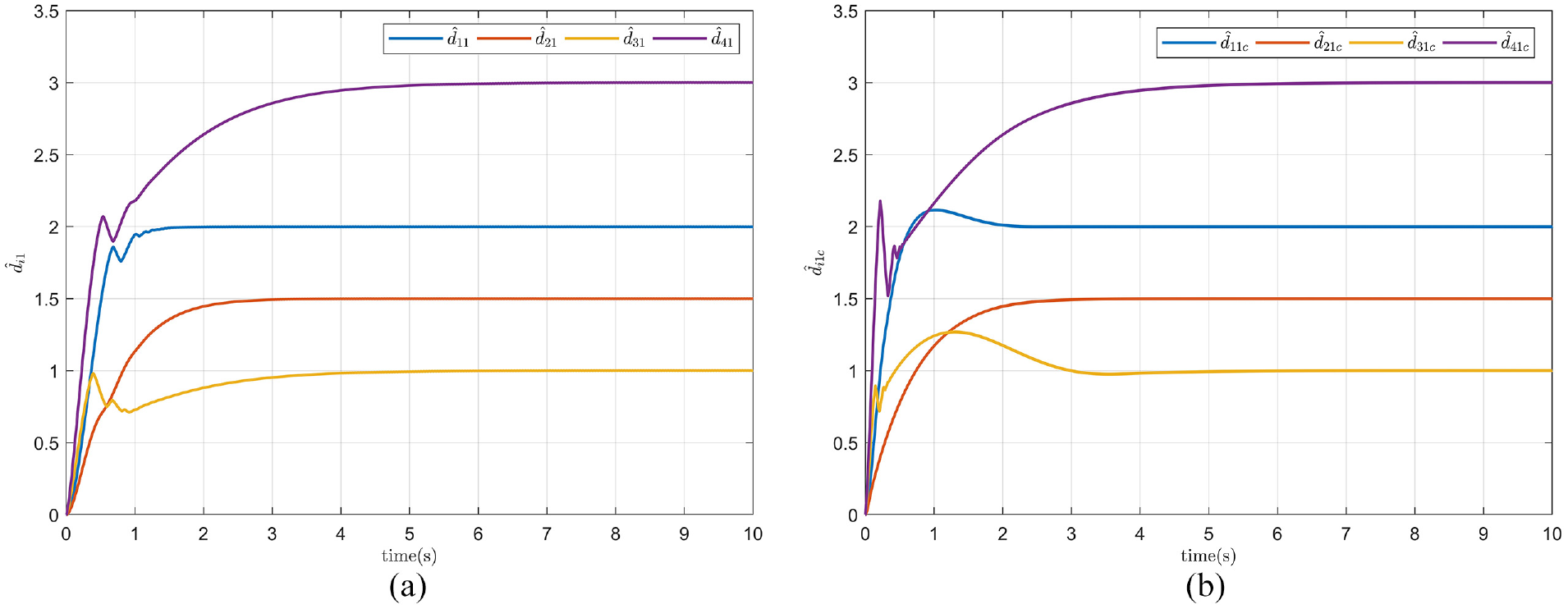
Figure 2 is the observation result of multi-source mismatch disturbance received by each follower, and Figure 3 is the observation error of mismatch disturbance.
Observed value of mismatched disturbance: (a) this paper and (b) Yang et al.31
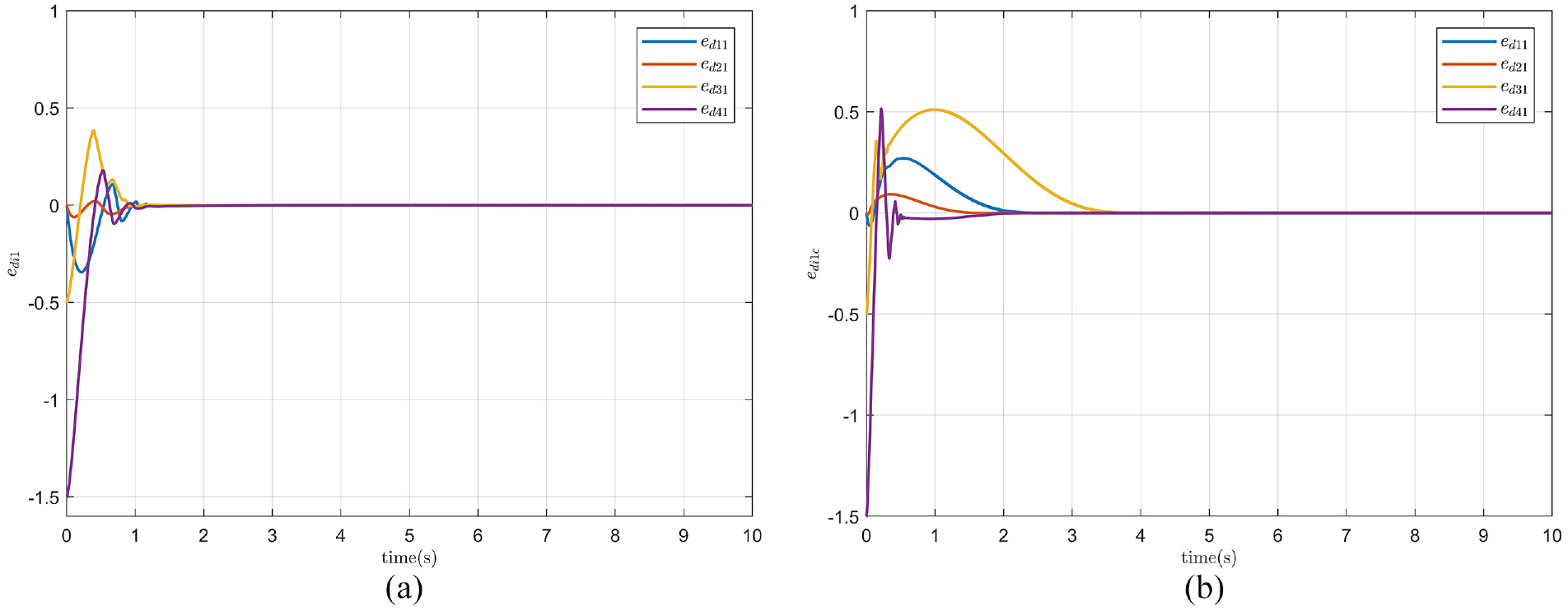
Estimation error of mismatched disturbance: (a) this paper and (b) Yang et al.31
It can be seen that the observation error of mismatch disturbance converges to zero in about 1.2 s, which shows that the observer designed in this paper can estimate mismatch disturbance quickly and accurately. Figures 4 and 5 are the observation values and observation errors of the matching disturbance suffered by each agent respectively, and the observation error of the matching disturbance converges to zero is obviously faster than the contrast method.
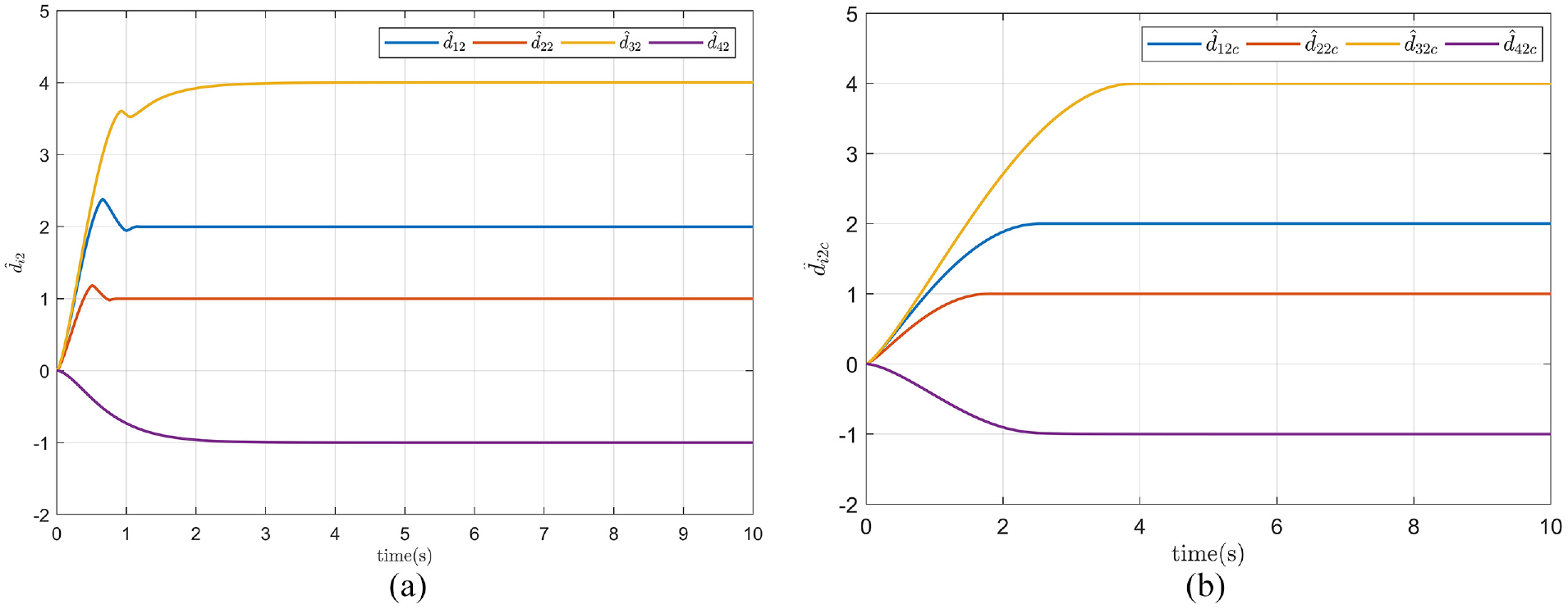
Observed value of matched disturbance: (a) this paper and (b) Yang et al.31
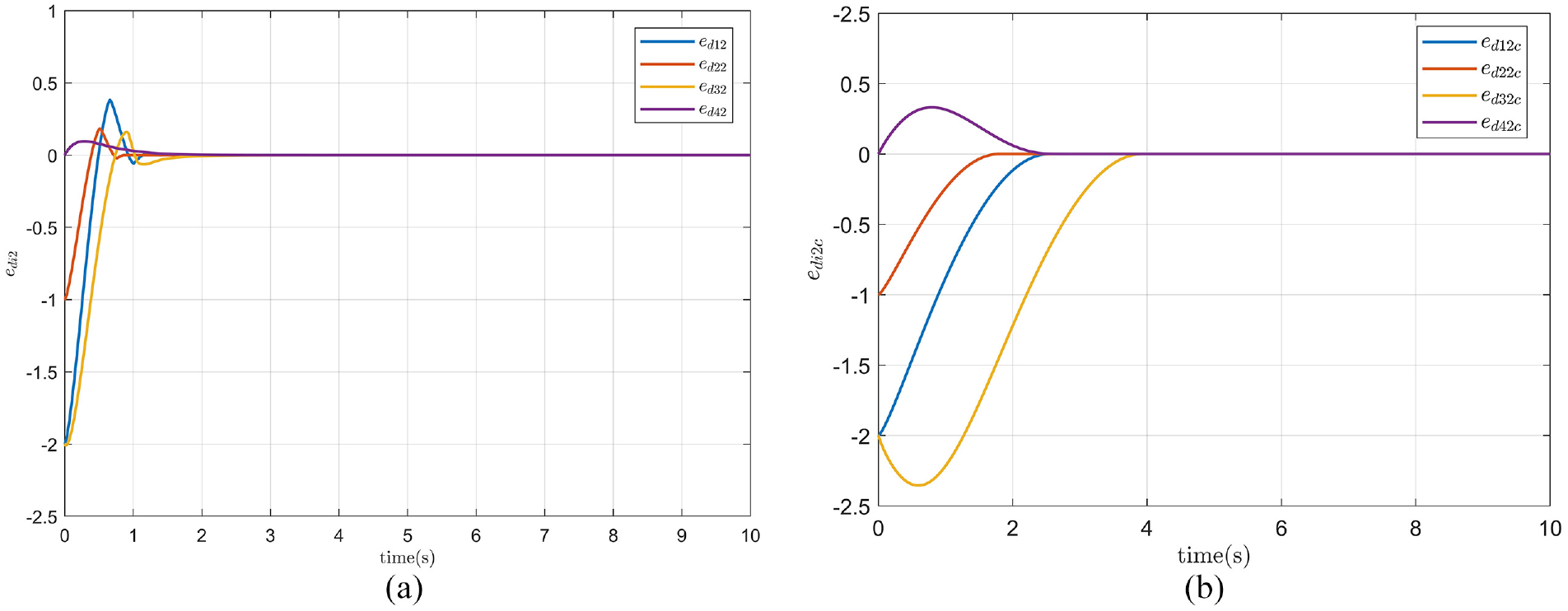
Observation error of matched disturbance: (a) this paper and (b) Yang et al.31
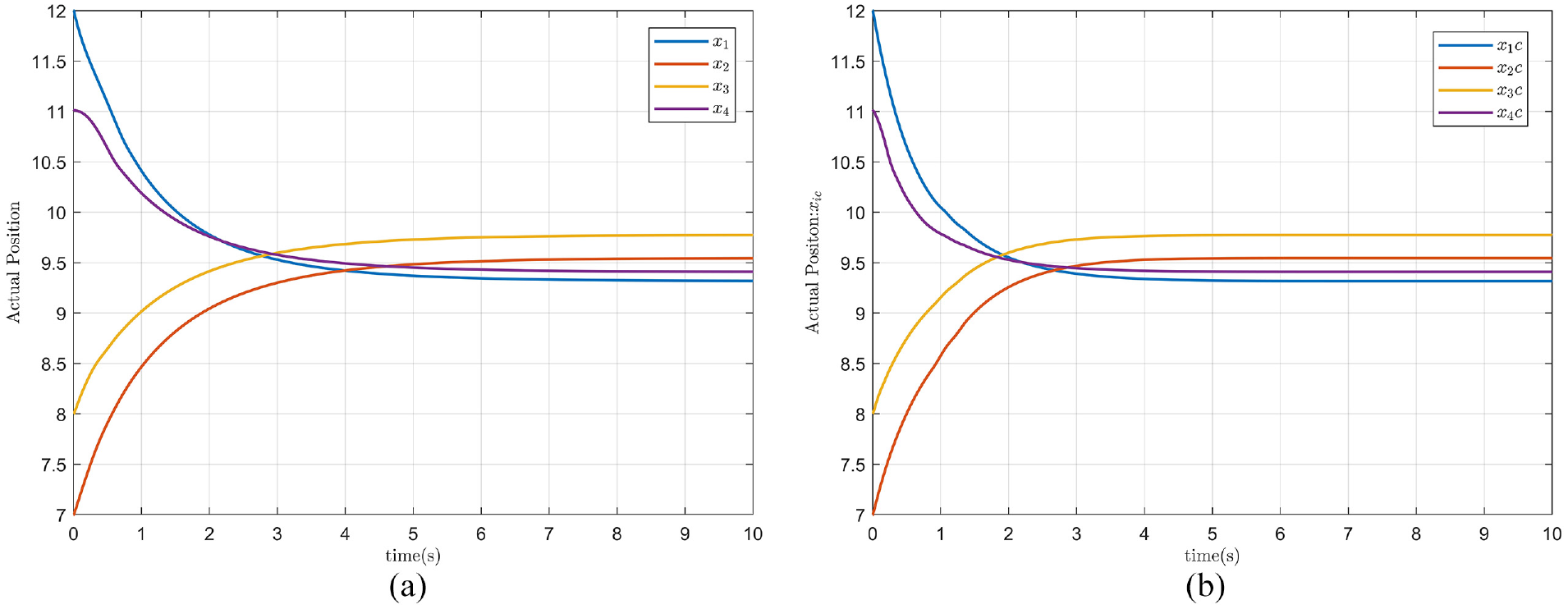
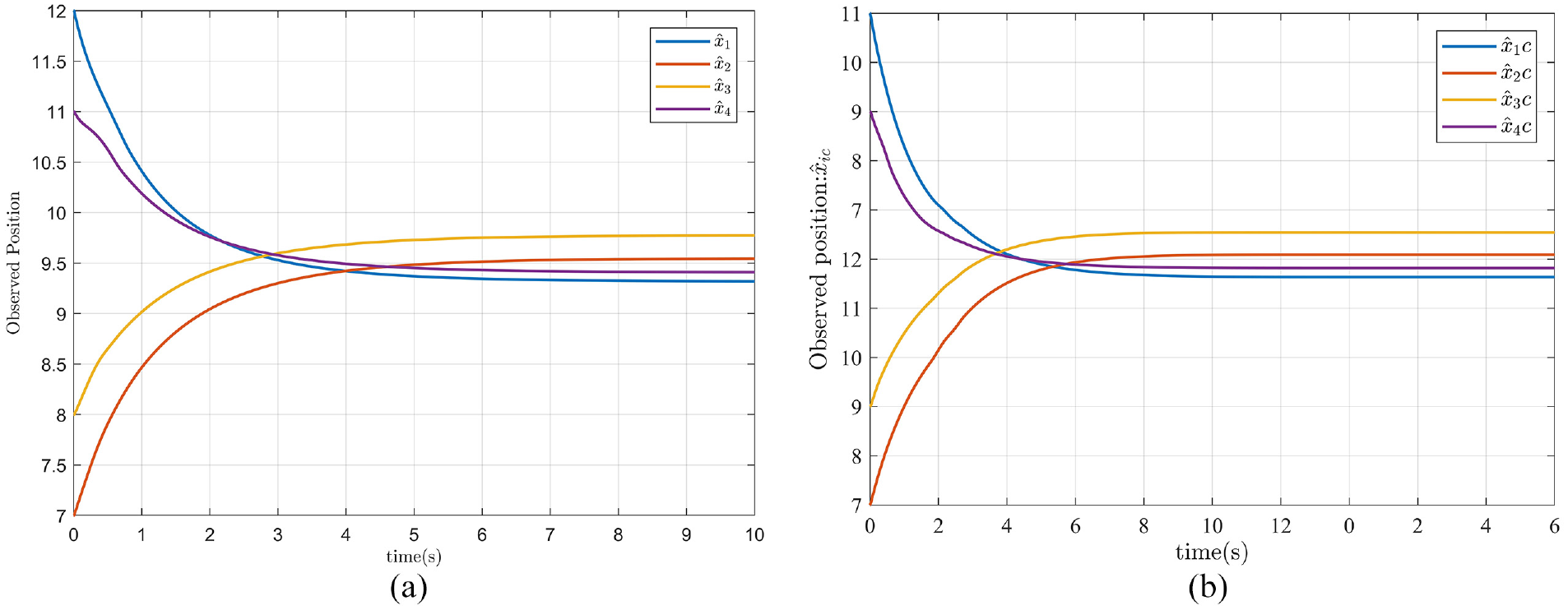
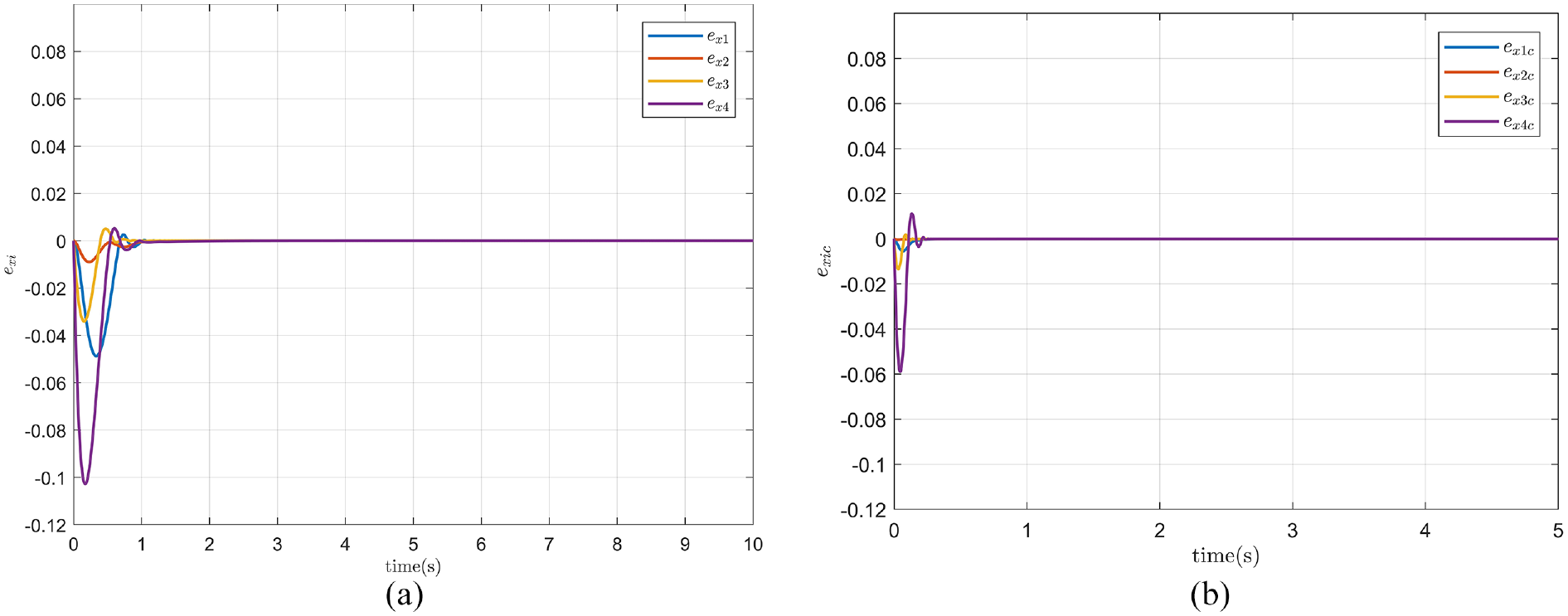
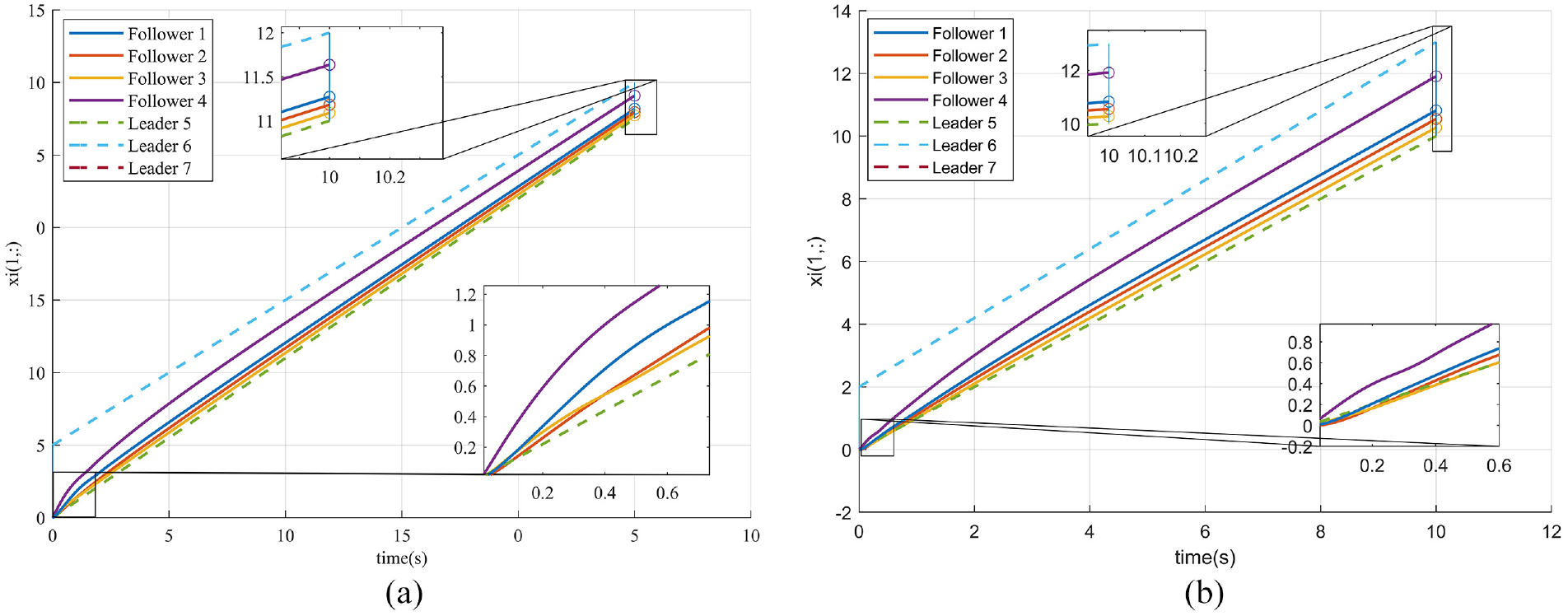
Figure 6 is the evolution process of the actual position state of each follower, and Figure 7 is the observation result of the follower’s position. According to Figure 8, both the observer proposed in this paper and the comparison observer can quickly and accurately estimate the position of the follower.
Actual position of followers: (a) this paper and (b) Yang et al.31
Observed position of followers: (a) this paper and (b) Yang et al.31
Position observation error of follower: (a) this paper and (b) Yang et al.31
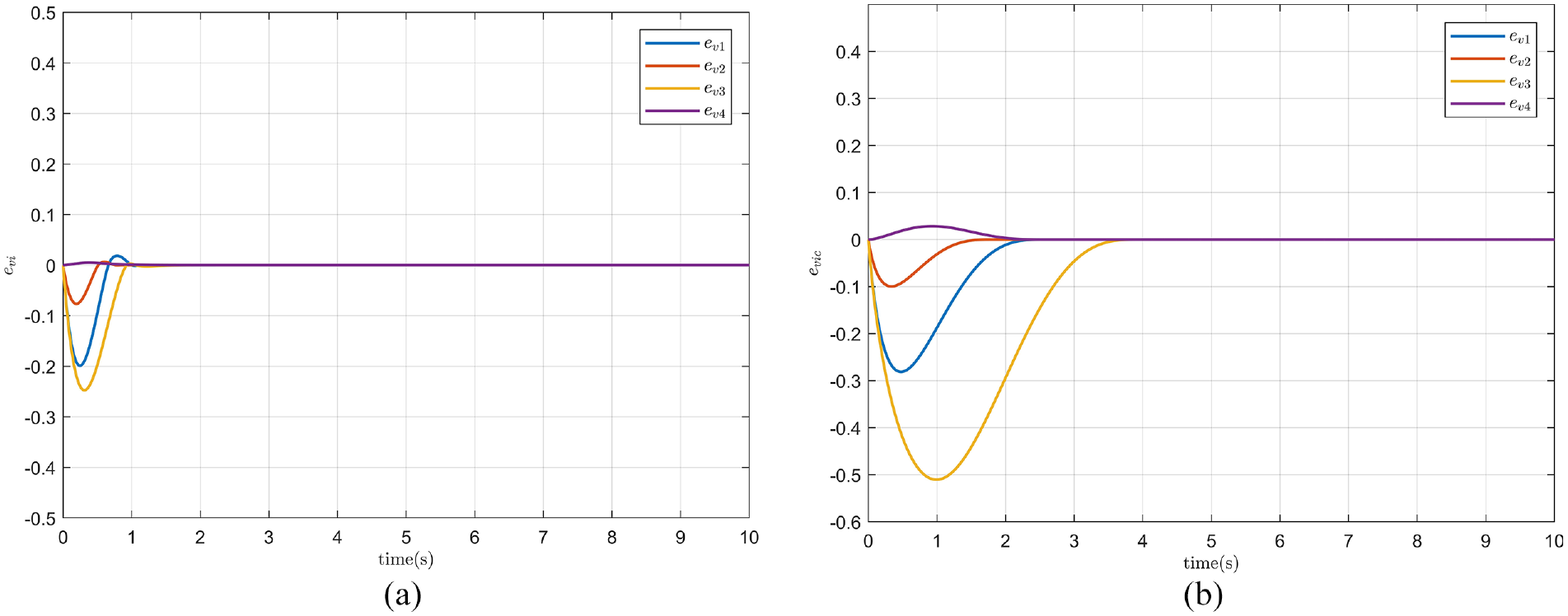
Figure 9 is the Speed observation error of followers, it can be seen that the observer proposed in this paper can accurately estimate the speed of followers in about 1 s, while the observer in Yang et al.31 converges to zero in about 4 s. The above simulation analysis fully shows that the disturbance observer proposed in this paper has a better performance.
Speed observation error of followers: (a) this paper and (b) Yang et al.31
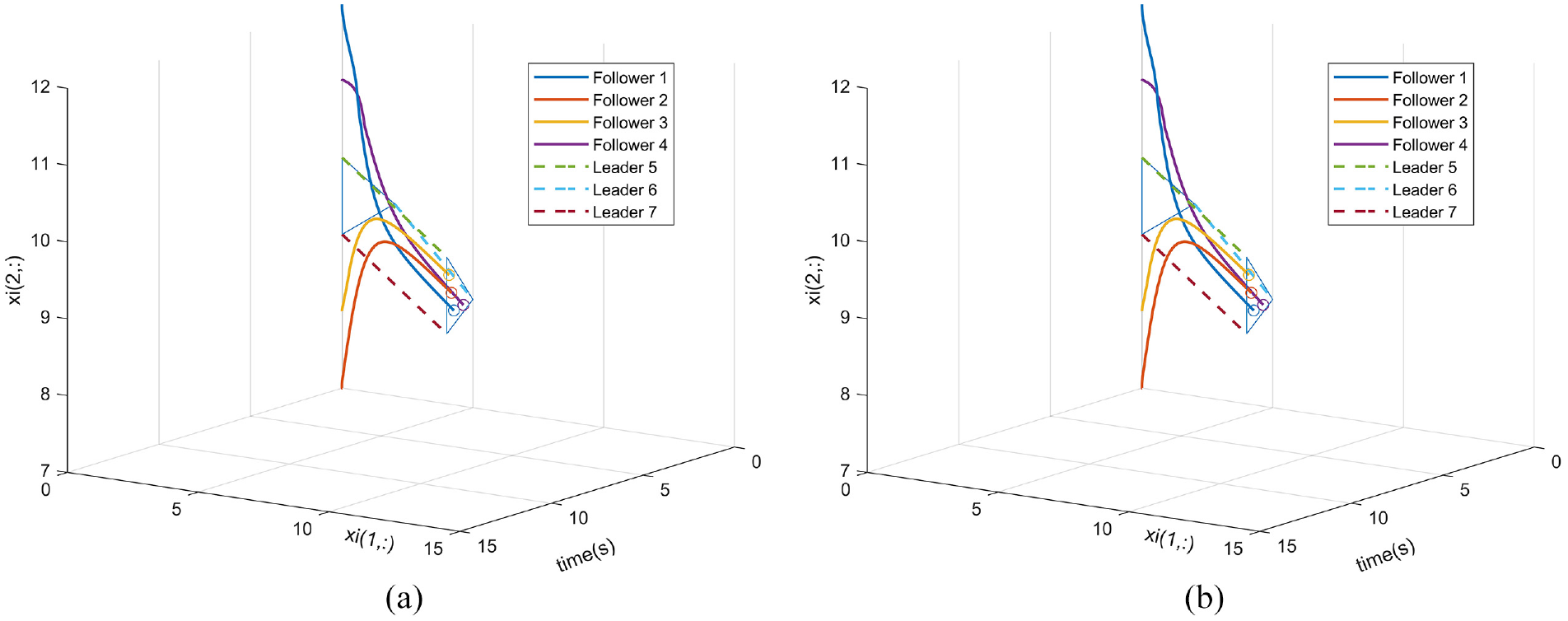
The control law designed in this paper is compared with the control law proposed in Cheng et al.20 from different perspectives. Figure 10 shows the evolution of the relationship between followers and leaders in 3D view. It can be seen that all followers successfully entered the convex hull formed by leaders, and the containment control was realized.
Evolution of the relationship between followers and leaders (3D view): (a) this paper and (b) Cheng et al.20
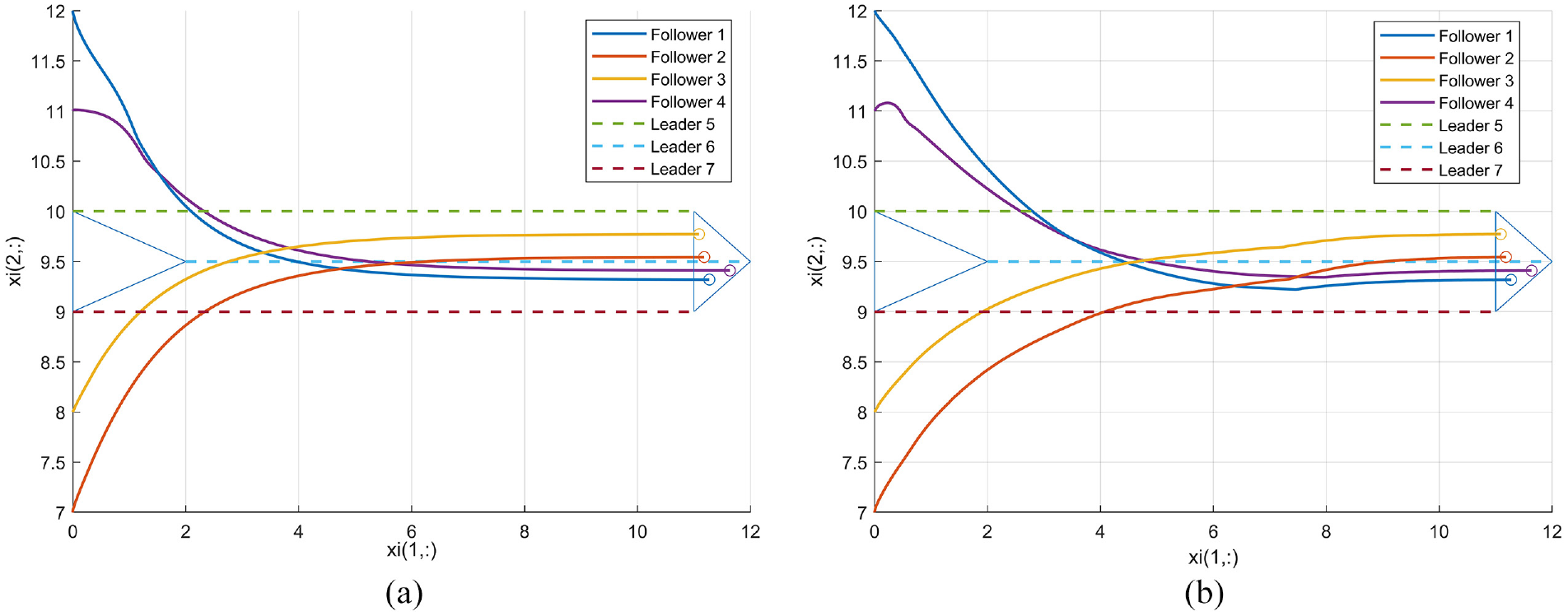
As can be seen from the comparison of Figure 11, the two control laws have achieved containment control in the X-Y perspective, that is, the followers (solid lines) have entered the area formed by the leaders (dotted lines).
Evolution of the relationship between followers and leaders (X-Y view): (a) this paper and (b) Cheng et al.20
From the comparison in Figures 11, 12 and 13, it can be seen that the multi-agent system containment control strategy proposed in this paper can urge followers to enter the convex hull formed by leaders in a shorter time (about 2 s). The strategy proposed in Cheng et al.20 can also make followers completely enter the convex hull within about 4 s, but in addition, it can be seen from the followers’ running trajectory that the control strategy proposed in this paper can achieve more stable control effect.
Evolution of the relationship between followers and leaders (X-Z view): (a) this paper and (b) Cheng et al.20
Evolution of the relationship between followers and leaders (Y-Z view): (a) this paper and (b) Cheng et al.20
To sum up, under the influence of multi-source mismatched disturbance, multi-agent system (12) and (14) can achieve containment control quickly and stably through control law (20) with the assistance of fixed-time disturbance observer (equation (17)).
Conclusion
In this paper, the fixed-time containment control problem of second-order multi-agent system under multi-source mismatched disturbance is studied. A fixed-time observer with mismatched disturbance is designed, and a distributed containment control protocol based on integral sliding surface is proposed. The stability of the proposed method is proved by Lyapunov stability theory and double-limits homogeneous theorem. Finally, the effectiveness of the proposed control strategy is illustrated by numerical simulation.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Science Foundation of China (Grant numbers: 62173137), and Project supported by Hunan Provincial Natural Science Foundation of China (Grant numbers: 2023JJ60232, 2021JJ50063).
ORCID iD
Cheng Xiang
References
1.
Ameer RasheedAANajm AbdullahMSabah Al-ArajiA. A review of multi-agent mobile robot systems applications. Elect Comput Eng Int J2022; 12(4): 3517.
2.
PerrusquíaAYuWLiX. Multi-agent reinforcement learning for redundant robot control in task-space. Int J Mach Learn Cybern2021; 12(1): 231–241.
3.
MasroorSPengC. Observer-based leader follower network multi-motor drive: an agent-based coordination control approach. Arab J Sci Eng2021; 46(10): 9725–9734.
4.
VerkroostLVandenabeeleTSergeantP, et al. Multi-agent position estimation in modular motor drives using low-resolution sensors. IEEE Open J Ind Electron Soc2022; 3: 105–115.
5.
WuRGuoXZhouH, et al. A method for formation control of autonomous underwater vehicle formation navigation based on consistency. In: International conference on bio-inspired computing: theories and applications, 2021, pp.142–157. Springer.
6.
ZhaoYMaYHuS. USV formation and path-following control via deep reinforcement learning with random braking. IEEE Trans Neural Netw Learn Syst2021; 32(12): 5468–5478.
7.
ZhouLLiuJZhengY, et al. Game-based consensus of hybrid multiagent systems. IEEE Trans Cybern2023; 53(8): 5346–5357.
8.
Olfati-SaberRFaxJAMurrayRM. Consensus and cooperation in networked multi-agent systems. Proc IEEE2007; 95(1): 215–233.
9.
WuJZhuYZhengY, et al. Resilient bipartite consensus of second-order multiagent systems with event-triggered communication. IEEE Syst J2023; 17(1): 146–153.
10.
LiPJabbariFSunXM. Containment control of multi-agent systems with input saturation and unknown leader inputs. Automatica2021; 130: 109677.
11.
SongXYangRYinC, et al. A cooperative aerial interception model based on multi-agent system for UAVs. In: 2021 IEEE 5th advanced information technology, electronic and automation control conference (IAEAC), 2021, pp.873–882. IEEE.
12.
XuDChenG. The research on intelligent cooperative combat of UAV cluster with multi-agent reinforcement learning. Aerosp Syst2022; 5(1): 107–121.
13.
GuoYSongDYWangC, et al. Robust formation control for missiles with obstacle avoidance. Chin J Aeronaut2022; 35(1): 70–80.
14.
WangDWangDWangW. Necessary and sufficient conditions for containment control of multi-agent systems with time delay. Automatica2019; 103: 418–423.
15.
CuiYLiuXDengX, et al. Adaptive containment control for nonlinear strict-feedback multi-agent systems with dynamic leaders. Int J Control2022; 95(6): 1658–1667.
16.
ShahamatkhahETabatabaeiM. Containment control of linear discrete-time fractional-order multi-agent systems with time-delays. Neurocomputing2020; 385: 42–47.
17.
DuHWenGWuD, et al. Distributed fixed-time consensus for nonlinear heterogeneous multi-agent systems. Automatica2020; 113(11): 108797.
18.
NingBHanQLZuoZ. Practical fixed-time consensus for integrator-type multi-agent systems: a time base generator approach. Automatica2019; 105: 406–414.
19.
HaoLZhanXWuJ, et al. Fixed-time group consensus of nonlinear multi-agent systems via pinning control. Int J Control Autom Syst2021; 19(1): 200–208.
20.
ChengWZhangKJiangB, et al. Fixed-time fault-tolerant formation control for heterogeneous multi-agent systems with parameter uncertainties and disturbances. IEEE Trans Circuits Syst I Regul Pap2021; 68(5): 2121–2133.
21.
IqbalMKoliosPPolycarpouMM. Finite- and fixed-time consensus protocols for multi-agent systems with time-varying topologiesIEEE Control Syst Lett2022; 6: 1568–1573.
22.
WangLWuJZhanXS, et al. Fixed-time bipartite containment of multi-agent systems subject to disturbance. IEEE Access2020; 8: 77679–77688.
23.
YinYWangFLiuZ, et al. Finite/fixed-time consensus of nonlinear multi-agent systems against actuator faults and disturbances. Trans Inst Meas Contr2020; 42(16): 3254–3266.
24.
WangHRenWYuW, et al. Fully distributed consensus control for a class of disturbed second-order multi-agent systems with directed networks. Automatica2021; 132: 109816.
25.
YuZYuSJiangH, et al. Distributed consensus for multi-agent systems via adaptive sliding mode control. Int J Robust Nonlinear Control2021; 31(15): 7125–7151.
26.
AndrieuVPralyLAstolfiA. Homogeneous approximation, recursive observer design, and output feedback. SIAM J Control Optim2008; 47(4): 1814–1850.
27.
LiZRenWLiuX, et al. Distributed containment control of multi-agent systems with general linear dynamics in the presence of multiple leaders. Int J Robust Nonlinear Control2013; 23(5): 534–547.
ZhangDDuanG. Leader-following fixed-time output feedback consensus for second-order multi-agent systems with input saturation. Int J Syst Sci2018; 49(14): 2873–2887.
30.
BhatSPBernsteinDS. Finite-time stability of continuous autonomous systems. SIAM J Control Optim2000; 38(3): 751–766.
31.
YangYLiuFYangH, et al. Distributed finite-time integral sliding-mode control for multi-agent systems with multiple disturbances based on nonlinear disturbance observers. J Syst Sci Complex2021; 34(3): 995–1013.