
Abstract
In the areas of aerospace and military industry, wheeled vehicles are expected to have the ability of passing various ground surfaces, including lunar soil, sand, marsh, mud flat, etc. This makes vehicle trafficability on soft ground become a very hot research topic. There are very a few difficulties in the present research of vehicle trafficability on soft ground, such as obtaining wheel-ground interaction information, inaccurate identification of soil mechanical characteristics parameters, and single evaluation index. In this paper, a novel approach of evaluating the vehicle trafficability on soft ground using wheel force information is proposed. As parts of the proposed approach, the methods of obtaining wheel force information, identification of soil mechanical characteristics parameters and integated method of trafficability evaluation, are discussed in detail. The proposed approach was validated through a practical test.
Introduction
In recent years, with the rapid progress of vehicle technology and its applications in the areas of aerospace and military industry, wheeled vehicles are expected to run on various kinds of ground, such as lunar soil, sand, marsh, mud flat, etc. This makes the vehicle trafficability on soft ground, that is, the vehicle trafficability on soft ground without geometric features, become a hot research topic. In addition, if the possibility of vehicles passing through the soft ground can be predicted only by use of vehicle parameters and soft ground soil parameters, it will benefit the implementation of space programs or military activities, and avoid unnecessary losses as well.
The study of vehicle trafficability on soft ground involves two nonlinear systems, namely vehicle and soil. The interaction between the two systems is very complex, and there is no consensual theory or method in the research field. Especially, an effective evaluation and prediction system for vehicle trafficability has not been established. 1 At present, the representative evaluation index of vehicle trafficability on soft ground include: (i) traction coefficient, which is equal to the pulling force exerted on the hook per weight of the vehicle, proposed by Bekker; (ii) vehicle cone index (VCI) proposed by the US Corps of Engineers Waterway Test Station 2 ; (iii) average maximum pressure (MMP) proposed by the British Ministry of Defense 3 ; iv) driving efficiency proposed by Zhang Kejian. Thereinto, traction coefficient is widely accepted as a better index of evaluating the capability of vehicles passing soft ground, and then it has attracted more attention by scholars. Traction coefficient is equal to adhesive force minus resistance, divided by the vehicle weight, that is, pulling force exerted on the hook per weight of the vehicle. It is an integrated index, which reflects the soil strength reserveand vehicle power performance (e.g. acceleration, climbing and so on), and then is considered as a better index for evaluating vehicle trafficability. 4 The core of traction coefficient is the pulling force exerted on the hook.
In order to calculate the pulling force, Bekker proposed the classical semi-empirical model, which was based on the test, and then obtained the approximate equation of the relationship between tire and soil parameters by means of theoretical analysis and mathematical analysis. 5 Based on the classical semi-empirical model, many researchers have developed various modified and improved models, including shear stress model, soil bearing property model, and sliding settlement in the semi-empirical model.6–12 Most of the existing studies involve the estimation of pulling force exerted on the hook or the analysis of influence parameters, and validate the vehicle trafficability through practical test. Xue et al. 13 reviewed the methods of estimating in-orbit mechanics of the wheel soil and the identification methods for the mechanical parameters of the wheel soil model. Liang et al. 14 used three correction coefficients to obtain the accurate wheel lateral force model. Nagatani et al. 15 used the soil pressure and shear model to estimate the traction force and the vertical force. In recent years, with the development of numerical computation method and computer application technology, numerical simulation methods based on finite element analysis (FEM) and discrete element analysis (DEM) have been used to the nonlinear research of wheel and soil. 16 It used computer simulation software and combined soil mechanics theory, elastic-plastic theory and constitutive relationship theory to simulate the interaction process between soil-wheel. This method could get more actual situation of reflecting the interaction process, and to some extent, solved the problem that cannot be analyzed by traditional mechanics.
There are three challenges by using the existing research results to solve the problem of vehicle trafficability on soft ground. First of all, the technology of obtaining wheel force information is not mature. As the direct result of the interaction between vehicle and road, the wheel force is of great significance for evaluating vehicle running condition, calculating traction coefficient, etc. Generally, in the existing methods, the wheel force is not directly obtained, but estimated by means of models. It has great effect on the accuracy of calculating key indicators of vehicle trafficability such as traction coefficient. Secondly, the parameters of soft ground mechanical characteristic, which are very important for the vehicle trafficability analysis, cannot be estimated in real time. Most of the existing monitoring methods are off-line measures, which usually use professional instruments. It cannot meet the requirements for real-time analysis of vehicle trafficability. Finally, the theoretical method of evaluating vehicle trafficability on soft ground only uses a single traction coefficient as the evaluation index. The correlation and integration of different evaluation indexes need to be further investigated to improve the accuracy of vehicle trafficability evaluation.
Based on the above analysis, this paper proposes an integrated method for unmanned cluster trafficability evaluation and migration based on wheel force information. Firstly, wheel force sensors are used to obtain the wheel force information. Secondly, based on the wheel force information, the accurate identification of the mechanical parameters of soft ground is realized. Finally, through establishing a multi-index layered trafficability evaluation method, the vehicles trafficability index on soft ground is obtained.
The remainder of this paper is organized as follows: Section 2 analyzes the method of obtaining wheel force in detail, and presents a decoupling scheme to improve the accuracy of obtaining wheel force; Section 3 proposes the method of identifying the soil mechanical properties parameters for soft ground based on wheel force information; Section 4 stated the construction method of vehicle trafficability index; Section 5 gives some concluding remarks.
Technology for obtaining wheel force information
Approach of obtaining wheel force
In recent years, the technology of obtaining wheel force information has made a rapid progress. Depending on the obtaining locations, it can be divided into three research branches, that is, on-tire, on-wheel and on-axle obtaining, as shown in Figure 1. On-tyre obtaining, which is called smart tire method, installs the sensors inside or on the surface of the tire, and thus can directly obtain data from the interaction point between the wheel and the road. 17 Considering the anisotropic deformation difference of tire material when running and the difficulties of in-tire sensor layout, the existing in-tire obtaining methods are only applied to intermittently obtaining quite a few parameters. Besides, the mechanical and spatial dynamic parameters of the remaining dimensions still need to be obtained through indirect estimation methods. On-wheel obtaining, which is called wheel force transducer method, directly designs the spoke as a multi-dimensional force sensor, which can obtain rich information (complete six mechanical dimensions) and has high accuracy. It is often used as the true value of wheel force in vehicle development and even aircraft landing gear testing. 18 Nevertheless, its design is very difficult, and its cost is extremely high. On-axle obtaining, which is called load sensing bearing method, embeds sensors into the bearing without modifying the wheel, and then its obtaining cost is the lowest one. 19 Nevertheless, the obtaining position is on-axle, which is far away from the touchpoint between the wheel and the road, and the movement of bearing balls can generate periodic interference, thus the accuracy and reliability of on-axle obtaining will be affected. 20
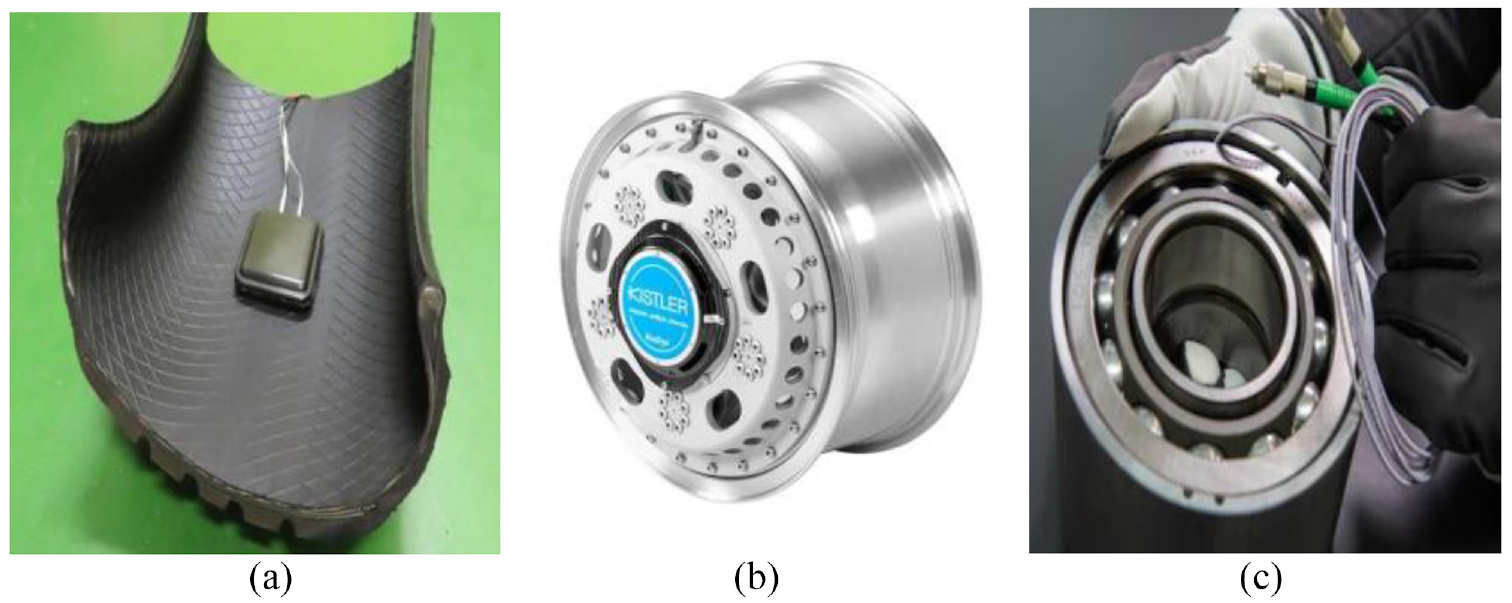
Wheel information obtaining schemes: (a) intelligent wheel, (b) wheel force sensor, and (c) force bearing.
Force-space coupling analysis
Different from the coupling interference of isomorphic data channels in traditional multi-dimensional perception, the research object of inter-dimensional coupling in the direct perception of wheel dynamics parameters is the force-space coupling effect between the mechanical dimension and the spatial dynamic dimension in the perception information. The reason for generating force-space coupling is that the perception and calculation of the wheel dynamics parameters need to be carried out in the wheel coordinate system and the body coordinate system respectively. Thus, the relative motion of the wheel and the body will directly affect the perception results in the wheel coordinate system. 21 The phenomenon of force-space coupling has attracted the attention of scholars in the early direct perception experiments. 22 With the enrichment of experimental methods and further investigation, force-space coupling, according to the formation reasons of coupling, is further divided into: (i) the attitude coupling generated by the relative attitude of the wheel coordinate system and the body coordinate system 23 ; and (ii) the inertial coupling generated by the relative maneuver between the coordinate systems, 24 as shown in Figure 2.
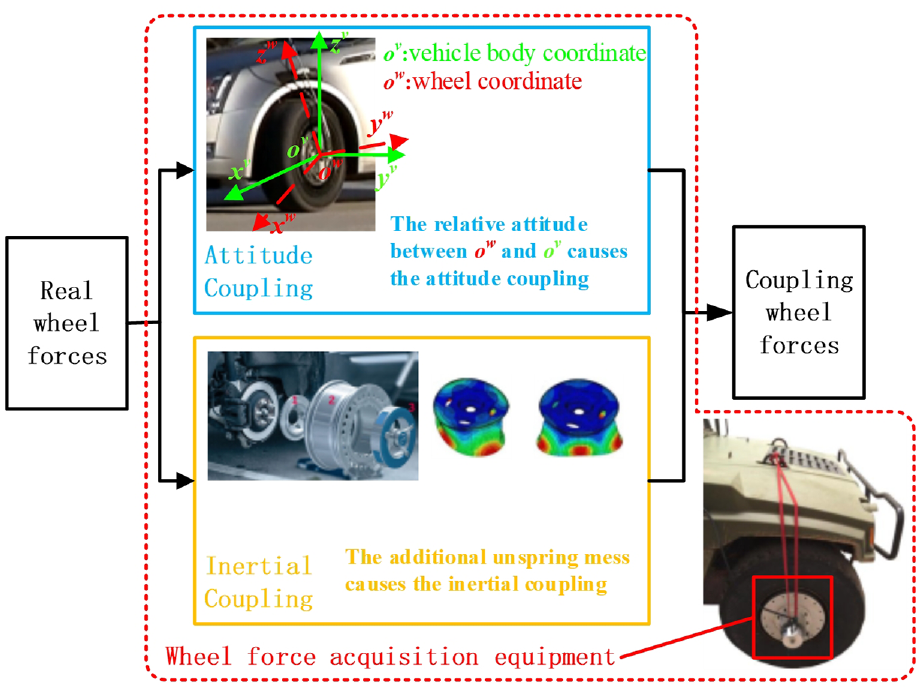
Coupling effect in obtaining wheel force information.
Method of wheel force decoupling
Two contributions25,26 stated the decoupling method of attitude coupling in detail, including the method of measuring wheel rotation angle, the method of calibrating initial value for the rotation angle of wheel-body coordinate system, and the method of correcting angle measurement deviation during the wheel steering process. We can use the above method, and the sensor output in the wheel coordinate system and the wheel rotation angle as well, then a good attitude decoupling effect can be achieved, as shown in Figure 3.
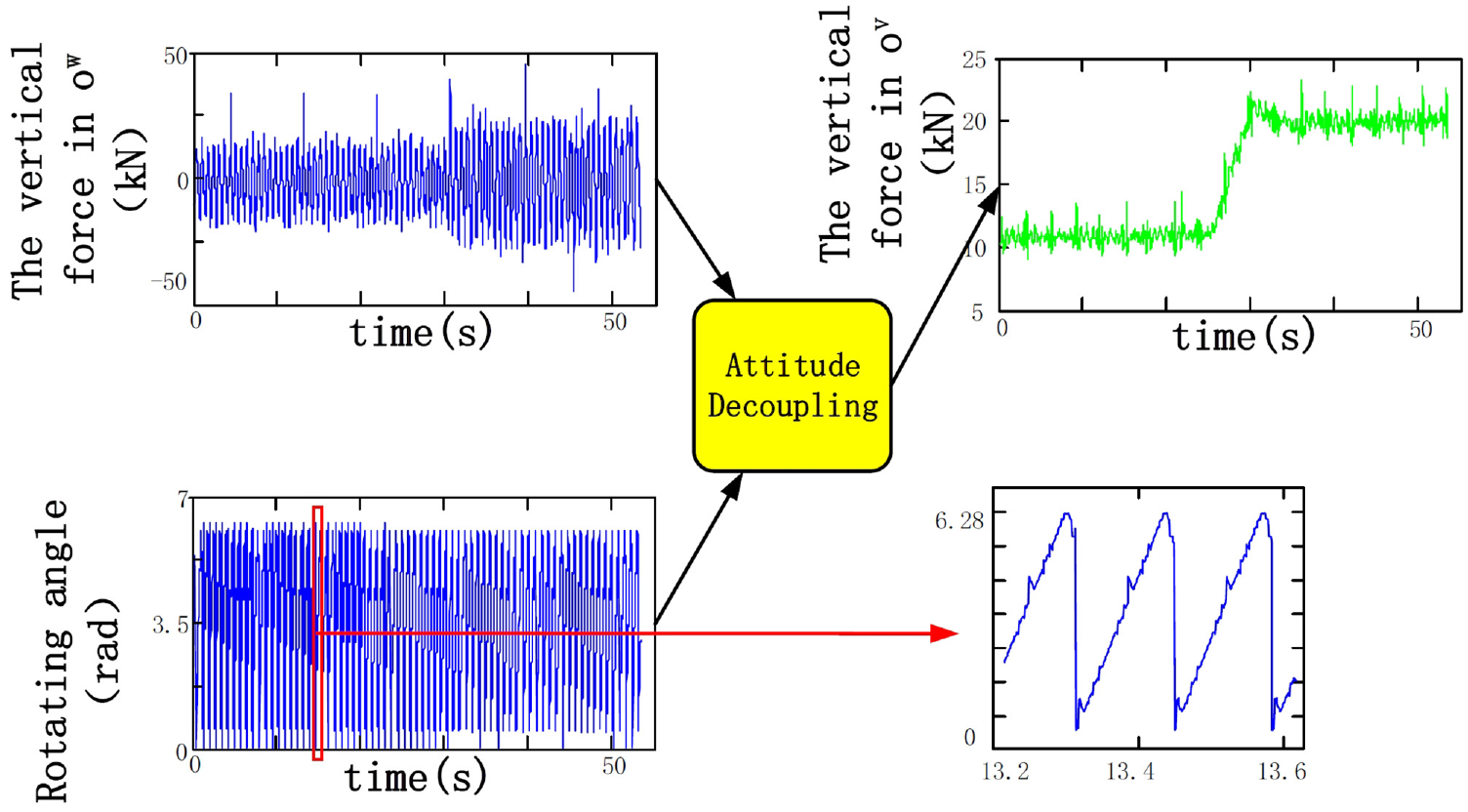
Decoupling effect of wheel force and attitude.
The purpose of inertial decoupling is to estimate and compensate the inertial load deviation caused by the installation of wheel force obtaining equipment. The premise of decoupling is to mathematically describe the inertial coupling phenomenon, that is, to establish the deviation load (

The software of multi-field coupling finite element analysis is used to establish wheel finite element models for pre- and post-installation of the wheel force obtaining equipment. Through changing the outer ring mass, as well as applying the acceleration in three directions (
In the motion field only with linear acceleration, the output of single-dimensional inertial force channel is shown in equation (2).

Where
Let main input channel
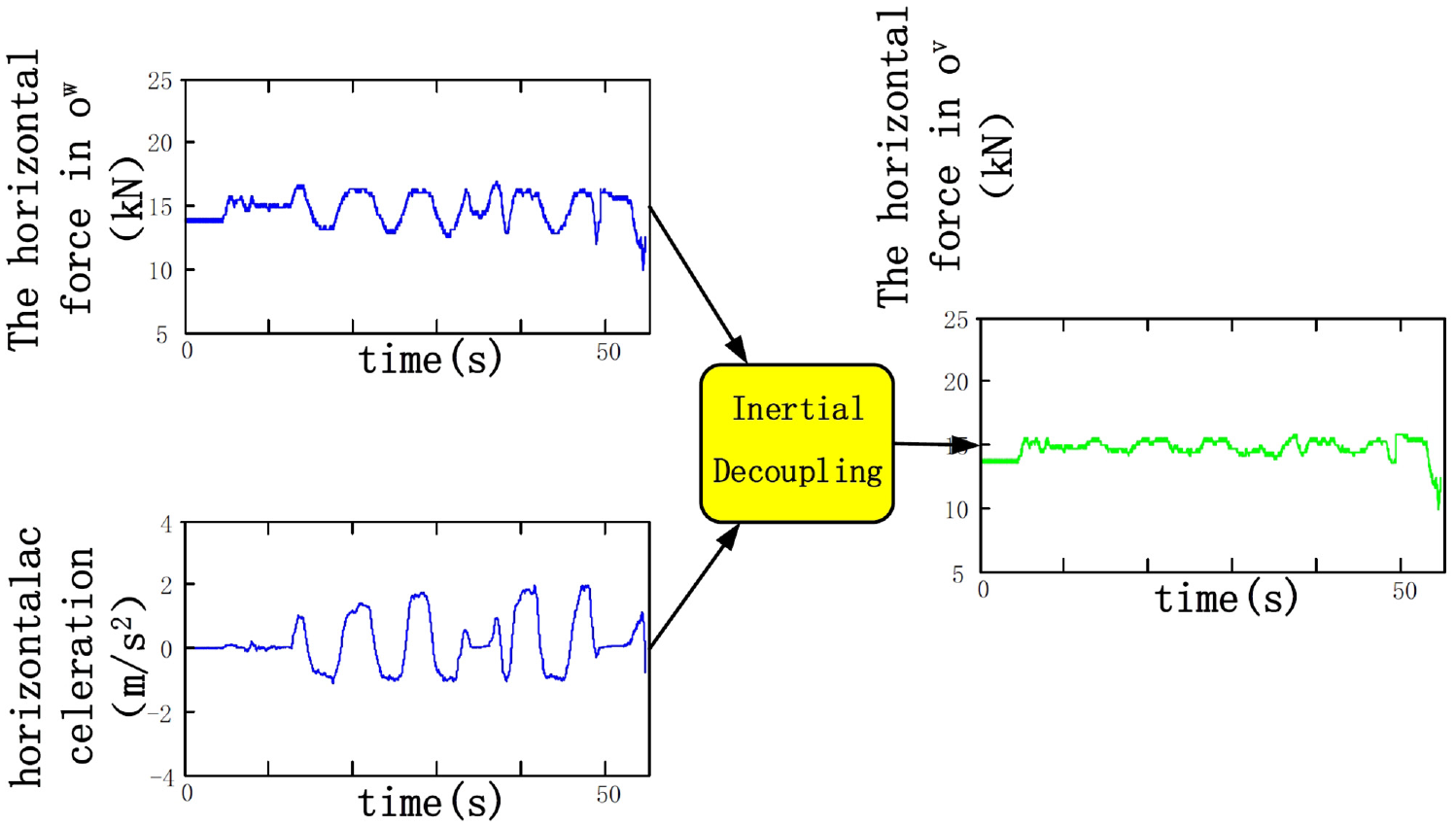
The result actual effect of wheel force inertia decoupling.
Approach of identifying soil mechanical properties parameters for soft ground
Identifying soft ground type based on wheel force
The identification of soft ground type is helpful to approximate soil mechanical parameters, and lays foundation for accurately identifying mechanical parameters.
Here we carried out a practical test, in which five types of soft ground are selected as the identification objects, including clay, sandy loam, sandy land, marsh land and plowed land, as shown in Figure 5.
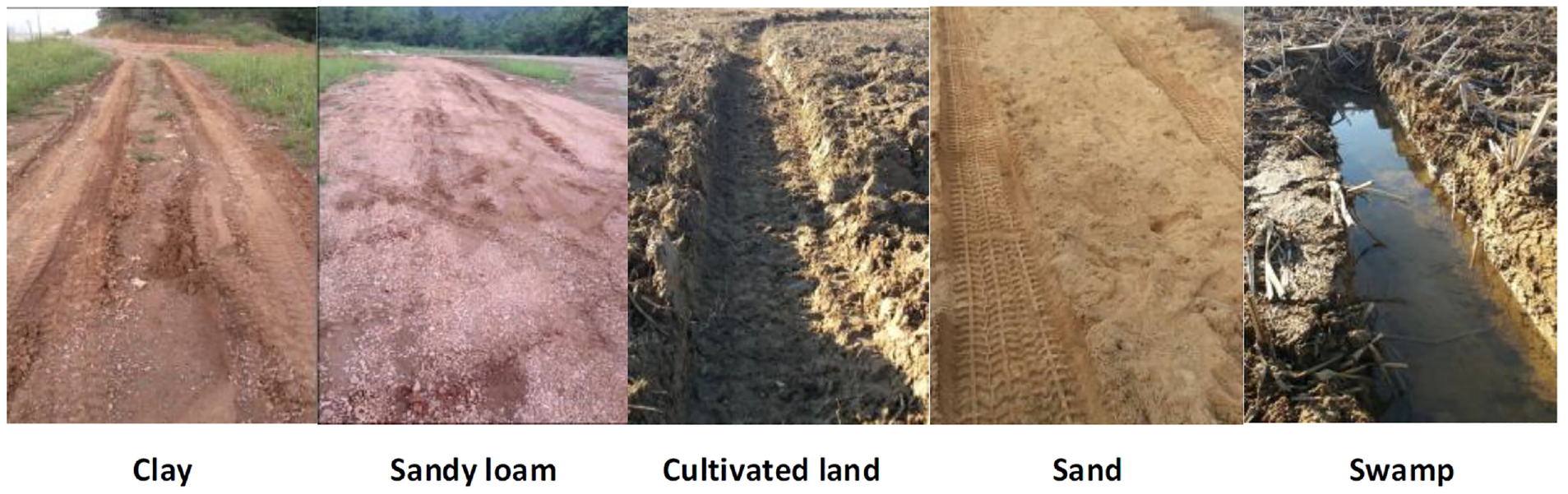
Different types of soft ground in the test.
In order to cover different conditions of vehicles sliding on the above five types of soft ground, and facilitate analyzing the factors of vehicle trafficability, we here design the following configuration scheme:
Test vehicles: select two types of vehicle, including Dongfeng Mengshi vehicles and Buick Sail vehicles.
Driving behavior: include speedup, slowdown, and continuous driving behavior composed of speedupand slowdown. Speedup test is carried out through controlling accelerator of the vehicle, while slowdown test is conducted through controlling initial velocity and brake of the vehicle.
Tire pressure: change the pressure of wheel tire in sequence from high to low, that is, 320, 300, 270, 240 and 210 kpa.
Load: change load of the vehicle by means of loading/unloading standard test sandbag (50 kg/bag), then let the increment load be 200, 400, 600, 800 and 1000 kg respectively.
Soft ground: when testing on each kind of soft ground, we consider two situations, namely first-pass and multi-pass. In first-pass test, select the route that has never been chosen before, and recover the soft ground to the initial status after a certain number of tests. On the contrary, in multi-pass test, select the route that has been chosen before.
Through combining different configuration schemes on different road surfaces, we then carry out vehicle trafficability test. Each test for different configuration combination is carried out three times, and the data collected from each test is used to subsequent analysis and processing.
The common used methods of identifying soft ground type include: ground image features based approach, vibration signal of wheel/body based approach, and combination of the two approaches. In one of our previous studies, we found that the excitation of ground is transmitted to the body of vehicle through its wheels. Theoretically, the stress on the wheels can directly reflect the differences of various soft grounds. Therefore, we here use the integrated approach using wheel force features and ground image features to identifying soft ground type. Because of the mutual independence between wheel force feature and ground image feature, a dual-view classifier based on wheel force and ground image features is established using the collaborative training framework. Besides, wavelet support vector machine is utilized to training the classifier, as well as road identification and classification. The accuracy of identifying soft ground type is shown in Table 1. It can be concluded that the identification method based on wheel force can precisely identify soft ground type.
Accuracy of identifying soft ground type.

Identifying soil mechanical characteristics parameters
After obtaining the soft ground type, we then can determine the initial value of soil parameters according to the empirical value. Next, using the theoretical models (i.e. the Bekker’s soil pressure model and Janosi’s soil shear mode), and taking the measured wheel states (including wheel force, slip rate, wheel settlement, etc.) as the feedback information, we establish the procedure of soil parameters estimation, as shown in Figure 6.
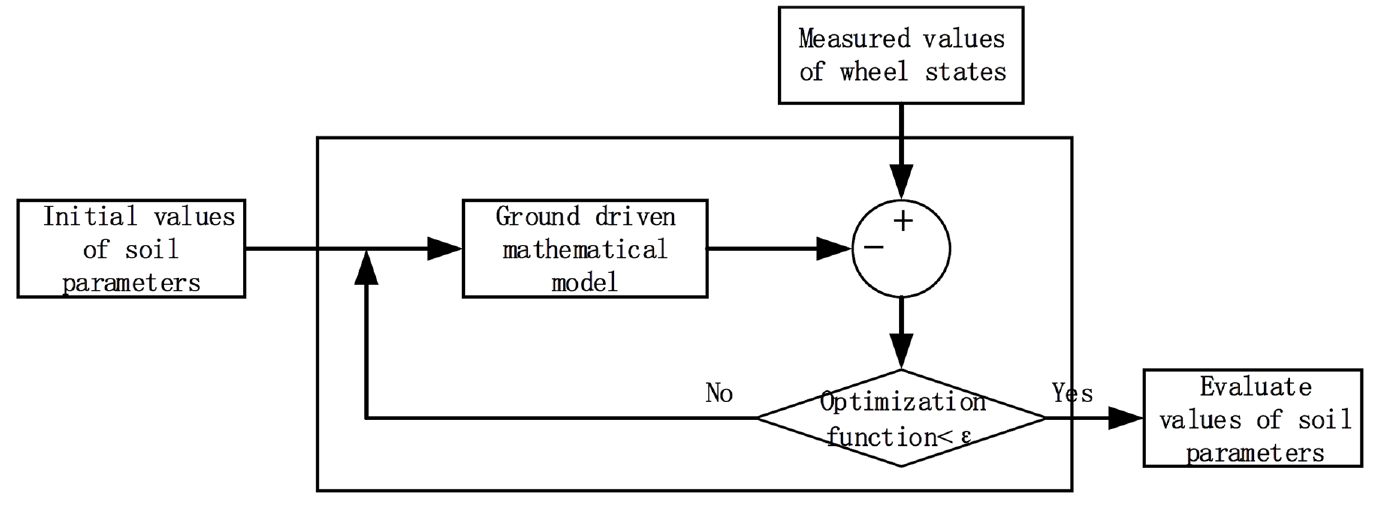
Procedure of soil parameters estimation.
In the above procedure, it adopts the optimization framework based on diversification strategy. Then, based on the exploration capability the global search algorithm and the mining capability of local search algorithm, the optimal value of soil parameters estimation can be obtained.
In order to verify the accuracy of soil parameters estimation, we get the real value through measuring soil parameters of the test ground by use of soil parameter measurement equipment (e.g. shear penetration tester, etc.). Then, the proposed estimation approach is compared to the traditional semi-empirical model of soil parameters estimation.
There are various types of soil parameters, including cohesion, internal friction angle, shear modulus of elasticity, friction modulus and settlement index. If all soil parameters are considered, it will not only reduce the speed of subsequent optimization, but also easily cause the instability of optimization results.
Through sensitivity analysis of soil parameters, this paper uses the method of parameters sensitivity theoretical analysis based on variance decomposition. Then, six parameters of soil characteristics, which play a major role, are determined, namely soil cohesion c, internal friction angle φ, Shear modulus of elasticity K, cohesion modulus kc, friction modulus kφ. Usually, kc and kφ appear in the formula simultaneously. In order to reduce the complexity of the model and facilitate its resolution, since the wheel width is certain, the two parameters are combined to one joint parameter L, which is defined as
Results of Identifying soil mechanical property parameters of soft ground.

Method of v evaluating vehicle trafficability
Identifying key indicators of vehicle trafficability
The traction on the hook and torque, as the indicators of vehicle trafficability, are the result of the interaction between vehicle and ground. Also, there is a coupling relationship between them, and their value is closely related to vehicle parameters, wheel status when driving and soil parameters. In this paper, the relationship between them is regarded as a complex nonlinear black box system, and can be resolved by regression algorithm.
There is very complex nonlinear relationship between vehicle and ground. Besides, the common used machine learning models, including support vector machine, multi-layer perceptron and Boosting algorithm, have limitations to model complex functions under limited samples and computing units, and have poor generalization ability for complex classification/regression problems. Therefore, a deep neural network with deep nonlinear network structure is used to model the relationship between hook traction/torque and various influencing parameters, as shown in Figure 7. The estimation results are shown in Figure 8. It can be seen that this method can achieve more accurate identification of key trafficability indicators.
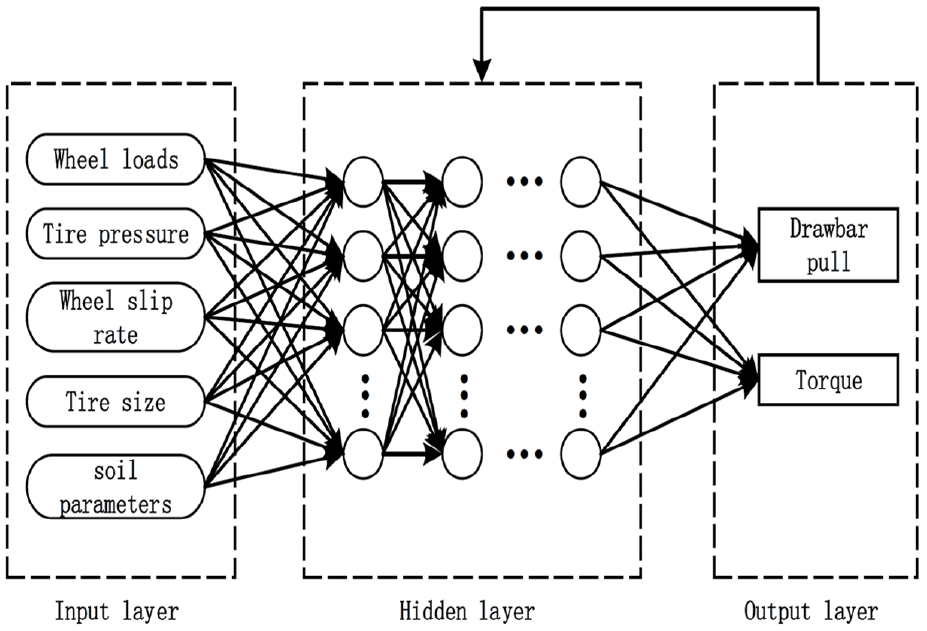
Estimating hook traction/torque based on deep neural network.
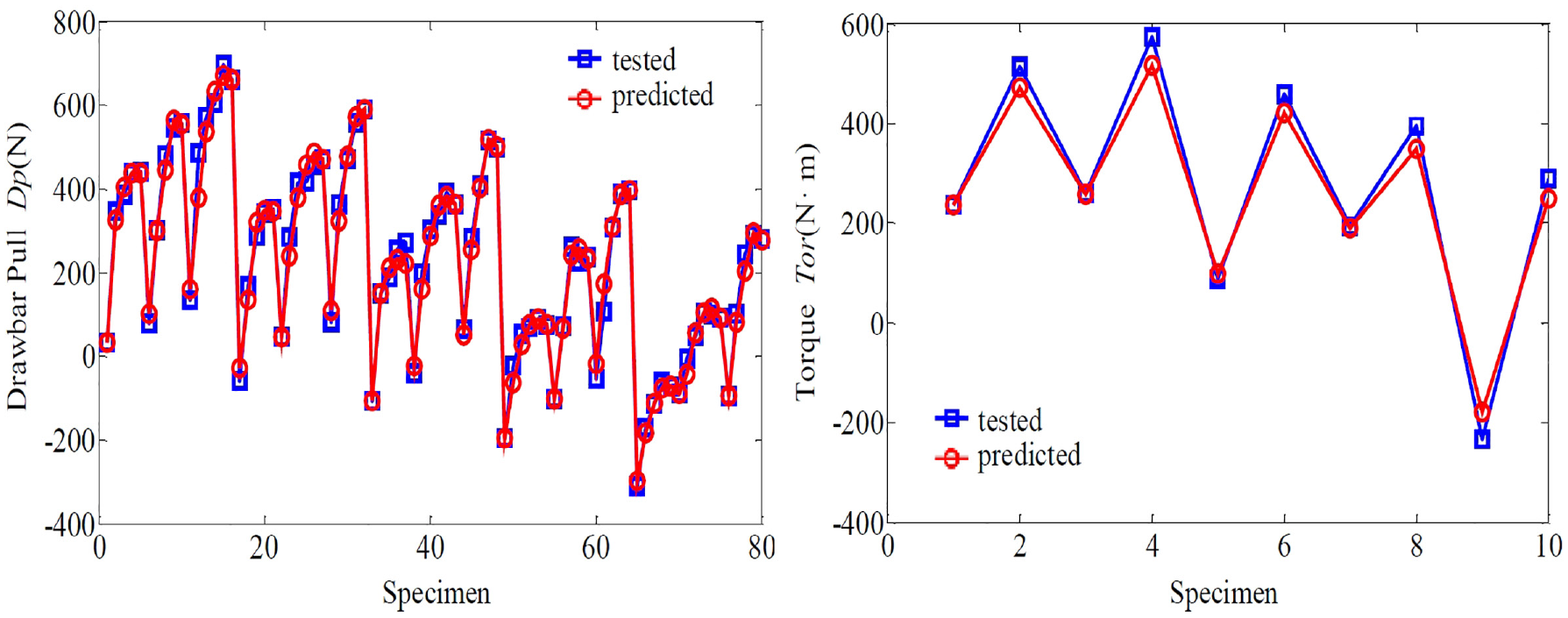
Estimation results of hook traction and torque.
Integrated evaluation system of vehicle trafficability
In order to effectively improve the evaluation and reliability of wheeled vehicles trafficability on soft ground, a fuzzy reasoning model with multi-rule, multi-input and single-output is utilized. The input of fuzzy reasoning the model include traction on the hook, as well as physical parameters of the vehicle, that is, tire type, tire pressure, engine power, and soil parameters of the ground. Meanwhile, its output is the confidence of vehicle trafficability. Figure 9 shows the evaluation results, which is shown in GIS map.
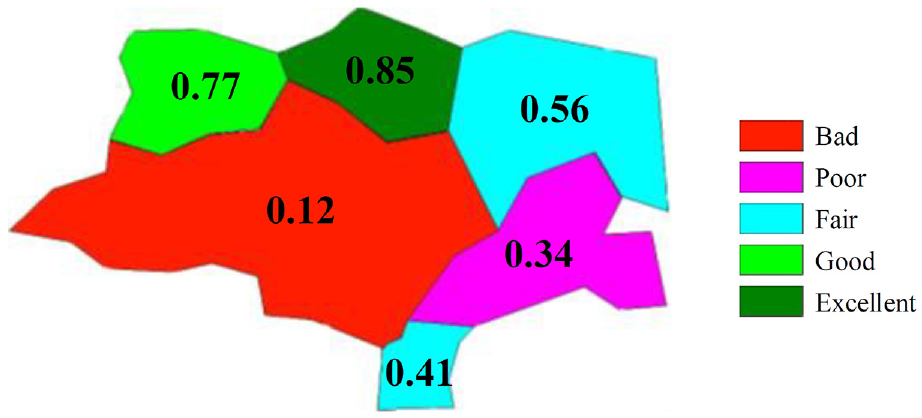
Evaluation result of vehicle trafficability.
Conclusions and future research
In order to realize effective evaluation of vehicle trafficability on soft ground, this paper presented an approach of evaluating vehicle trafficability on soft ground using wheel force information. The proposed approach uses wheel force information as the main data source, and improves the accuracy of identifying soil mechanical properties parameters through classifying ground type. Then, the key indexes of vehicle trafficability are estimated. Finally, an integrated evaluation system of vehicle trafficability based on fuzzy reasoning model was established. The results of a real vehicle test showed that the proposed approach can effectively estimate vehicle trafficability on soft ground, and the passing probability map can guide path planning for the vehicle running on soft ground.
Aside from the topic in the paper, it must be pointed out that there are still several other topics for further research in the future as follows: First, it does not distinguish initial pressure and re-pressing well, and evaluating vehicle trafficability for re-pressing needs to be further investigated; Second, the results of vehicle trafficability evaluation are highly relevant to vehicles, namely it cannot be used to other vehicles, then it need further study on applying the research results for one type vehicle to others.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.