
Abstract
In this paper, the event-triggered-based cluster-delay consensus control problem is investigated for leader-following nonlinear multi-agent systems (MASs). In control design, both state triggering in the agents’ network and constant time-delay in the leaders’ communication network are considered. Under the framework of Lyapunov function stability theory, the Lipschitz condition is used to overcome the influence caused by time-delay. In order to further effectively utilize data transmission resources, and reduce the communication load of the topology network between each agent, an event-triggered mechanism is established. Subsequently, a robust cluster consensus control strategy is proposed based on event-triggered mechanism, which can ensure all signals of the controlled system are bounded, and the tracking errors converge to zero. In addition, it can also effectively avoid the Zeno behavior. Finally, the effectiveness of the presented control method and theory is verified by a simulation example.
Keywords
Introduction
During the past decades, the research on consensus control of MASs1,2 have developed rapidly, which have been mainly applied to the following aspects: formation control, 3 cluster control, 4 swarm control, 5 aggregation problems, 6 synchronization control, 7 and coordinated decision control, 8 and so on. Among them, the problem of consensus control for MASs has also attracted considerable attentions from scholars. Reynolds 9 proposes a distributed behavioral model for drawing computer animations about the movement of animal collections. In order to study particles with self-ordered motion under noise disturbances, Vicsek et al. 10 propose a simple discrete time model. A consensus control scheme within the finite-time is proposed in Savkin. 11 Inspired by the literatures,9,11 the problem of consensus control for MASs has been widely studied. In Ni and Cheng, 12 under fixed and switched topology, the consensus control problem for higher order linear MASs is investigated. Olfati-Saber et al. 13 propose a consensus control algorithm for MASs and explain the concept and convergence of consensus. Li and Li 14 propose an adaptive neural network control algorithm to address the optimal consensus control problem of MASs with disturbances and faults.
With different tasks and goals, a group of agents can be divided into different subgroups, which perform cooperative tasks, which is called as cluster control. Thus, researching the cluster consensus of MASs is a trend. Cluster consensus refers to dividing all agents into several clusters, where all agents reach consensus in the identical cluster, but the agents realize differences in different clusters. It has been paid considerably attention due to its wide application in various areas including drones, mobile robots, and drone formation and so on. Han et al. 15 investigate cluster consensus control problem for MASs by proposing some theories and concepts of consensus. Qin and Yu 16 study the problem of cluster consensus control with directed interactive topology using the distributed feedback controller. Chen et al. 17 use Markov chain theory to address cluster consensus problem for MASs with discrete-time. In most of existing studies, cooperation or competition between agents in clusters is a very active research direction. Zhan and Li 18 discuss cluster consensus control issue in interactive imbalanced networks based on three weighted cooperative-competition networks. Ma et al. 19 work on the leader-following cluster consensus of three types of cooperative-competition networks disturbed by measurement noise.
However, the network resources and communication capabilities of the agents are usually limited. Therefore, in order to improve resource utilization and computing power, the time-triggered control protocols are proposed in Olfati-Saber and Murray 20 and Ren et al. 21 Compared with time-triggered control, the main characteristic of the event-triggered control is that the given triggering conditions are the decisive factor when updating the controller, and the timing device cannot determine it. Since then, event-triggered control has attracted widely attentions from scholars, for example, Li et al., 22 Xu and Huang, 23 and Zhou et al. 24 Li et al. 22 propose a new adaptive event-triggered protocol for MASs with external interference. Xu and Huang 23 study the consensus problem for MASs affected by actuator saturation based on event-triggered mechanism. Zhou et al. 24 work on the finite-time fuzzy adaptive event-triggered consensus control for unknown nonlinear MASs. In the cluster consensus control of MASs, event-triggered control protocols have attracted considerable attentions. In Xia et al., 25 the problem of event-triggered-based cluster consensus control for two types of leader-following nonlinear MASs is considered. In case of actuator failure and DOS attacks, Guo et al. 26 propose the event-triggered-based cluster consensus control strategy for nonlinear MASs.
In general, the time-delay may damage nonlinear systems and lead to subsystem instability. Note that the time-delay problem is not considered in the above references. In the MASs, time-delay may occur naturally. Therefore, considering the problem of the time-delay is warranted in the MASs, for example, Li et al., 27 Ma et al., 28 and Huang et al.29,30 The authors study the finite-time control problem for the uncertain MASs with input delay and unmeasurable states in Li et al. 27 Ma et al. 28 propose a new definition about cluster-delay consensus and analyze the convergence. Huang et al. 29 consider cluster-delay consensus for second-order nonlinear MASs. By using a pinning control method, Huang et al. 30 focus on the cluster consensus problem for first-order nonlinear MASs with time-delay.
Motivated by the aforementioned observations, the problem of leader-following event-triggered-based cluster-delay consensus control is investigated for first-order nonlinear MASs in this paper. With the help of the event-triggered mechanism, a robust leader-following consensus control scheme is developed for nonlinear MASs. The presented control scheme can ensure the controlled system is stable. Compared with the previous literatures, the main contributions of this paper can be highlighted as follows:
(1) The event-triggered-based cluster-delay consensus control approach is first developed in this paper for nonlinear MASs with constant time-delay. Compared with the works,16,31 although the developed control method can address the event-triggered control problem, it can not be applied to solve the control problems for nonlinear MASs with time-delay. By designing an event-triggered controller, this paper can not only solve the problem of cluster-delay consensus control for the nonlinear system, but also ensure that all signals are bounded. The presented control approach can reduce the update frequency and energy consumption of the controller.
(2) Combining Lyapunov stability theory and matrix theory, several sufficient conditions are given to reach cluster-delay consensus control for nonlinear MASs. Since the works32,33 are also considered the time-delay problem, but the developed control method in Ge et al. 32 and Huang et al. 33 can not solve the situation of leaders with time-delay. Therefore, this paper uses the Lipschitz condition to solve the time-delay problem in the leaders’ communication network while ensuring the stability of the system.
The rest of this article is as follows. In the section 2, we first summarize some graph and matrix theory notions and then formulate the model to be studied. Section 3 introduces the major achievement of an event-triggered-based cluster-delay consensus control problem. The simulation results are verified the effectiveness of the proposed method in Section 4, and a summary in Section 5 is provided.
Problem statement
Notations and preliminaries
A weighted directed graph
The Laplace matrix
The set
Notations: Let
Problem formulation
Consider a network of nonlinear dynamic MASs with
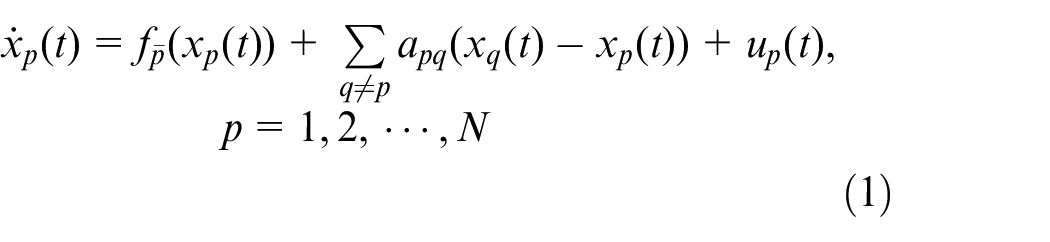

where
Definition 1:
34
For any initial states, cluster consensus can be achieved for the interacting

Definition 2: 28 The MASs with (1) and (2) can realize the leader-delay consensus, if the initial states of leaders satisfy

Definition 3: 28 It implies that the cluster-delay consensus can be reached for the MASs with (1) and (2), if each initial state satisfies

and

Assumption 1:
16
From the
Assumption 2:
35
Assume that there is a constant

for any
Assumption 3:
25
For the states

Remark 1: Noted that, in reality, when the actuator reaches the input limit, the system will be saturated. While in this paper, the states of the leaders are assumed to be bounded.
Main results
In this section, an event-triggered control strategy is proposed for the nonlinear MASs with leader-delay. The cluster-delay consensus control diagram based on event-triggered strategy is shown in Figure 1.
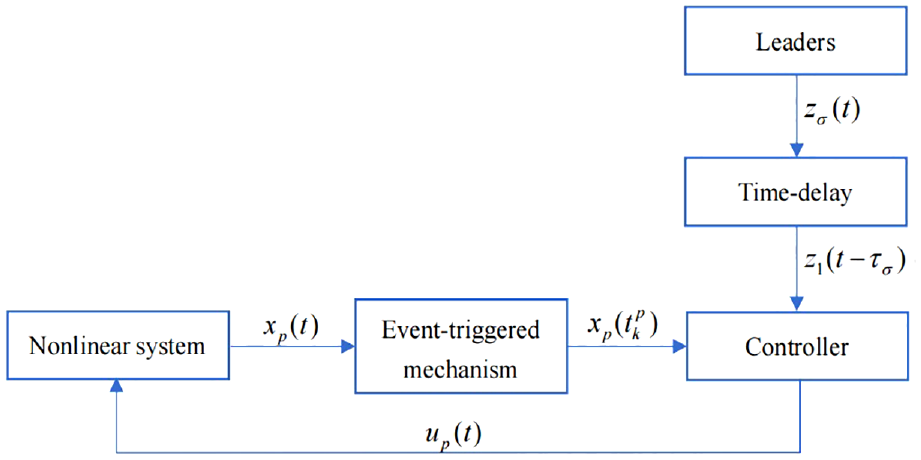
Cluster-delay consensus control diagram based on event-triggered strategy.
Event-triggered convergence analysis
Consider a network system of
where
Define the trigger time series of the

where measurement error

and
Remark 2:
Define the tracking error as follows

According to the equation
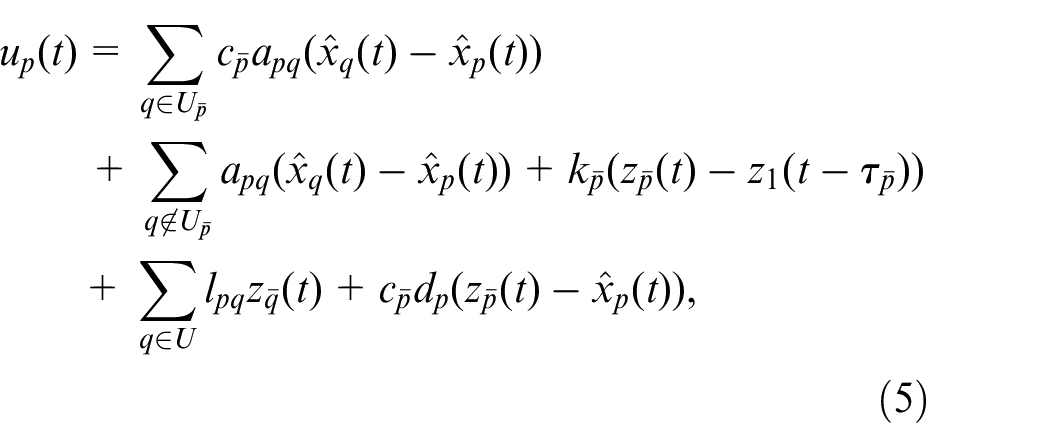
From equation (5),
Therefore, combining equations (2), (9), and (11), the
By the definition and properties of Laplace matrix, it can be obtained that
Then, one gets
Theorem 1: Under Assumptions 1–2, if there exist constants

where
Proof: The Lyapunov function candidate is introduced:

From (9) and (14), the time derivative of
Let
Thus, it follows that
Based on Assumption 2, one has
Divide
Invoking (7)−(9) yields

which can further yield

where
with the help of Young’s inequality, one has
Therefore, according to inequality (15), we can obtain
Zeno behavior analysis
Theorem 2: Zeno behavior phenomenon can be excluded under the given event-triggered control strategy (6).
Proof: According to the equation (7),

then the derivative of

Thus, we have
From equation (16), there are positive definite matrices

Due to
Then, one has
When
It can be calculated that
Then
Thus, it means that
It shows that Zeno behavior can be avoided.
Cluster-delay convergence analysis
In the above section,

Theorem 3: Under Assumption 2, if there are constants

then leader-following cluster-delay consensus control for the MASs (1) and (2) can be reached.
Proof: From equations (2) and (22), we obtain
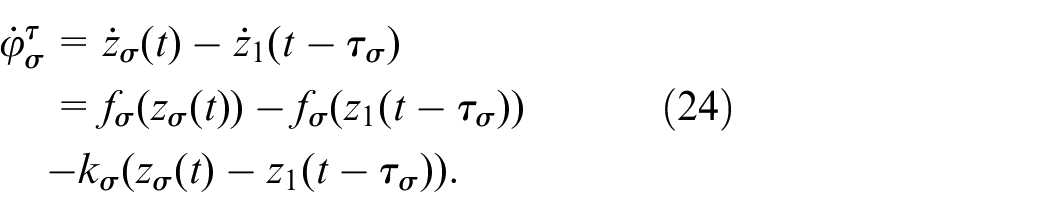
Construct the Lyapunov function as:

Then, according to (24), the differentiating
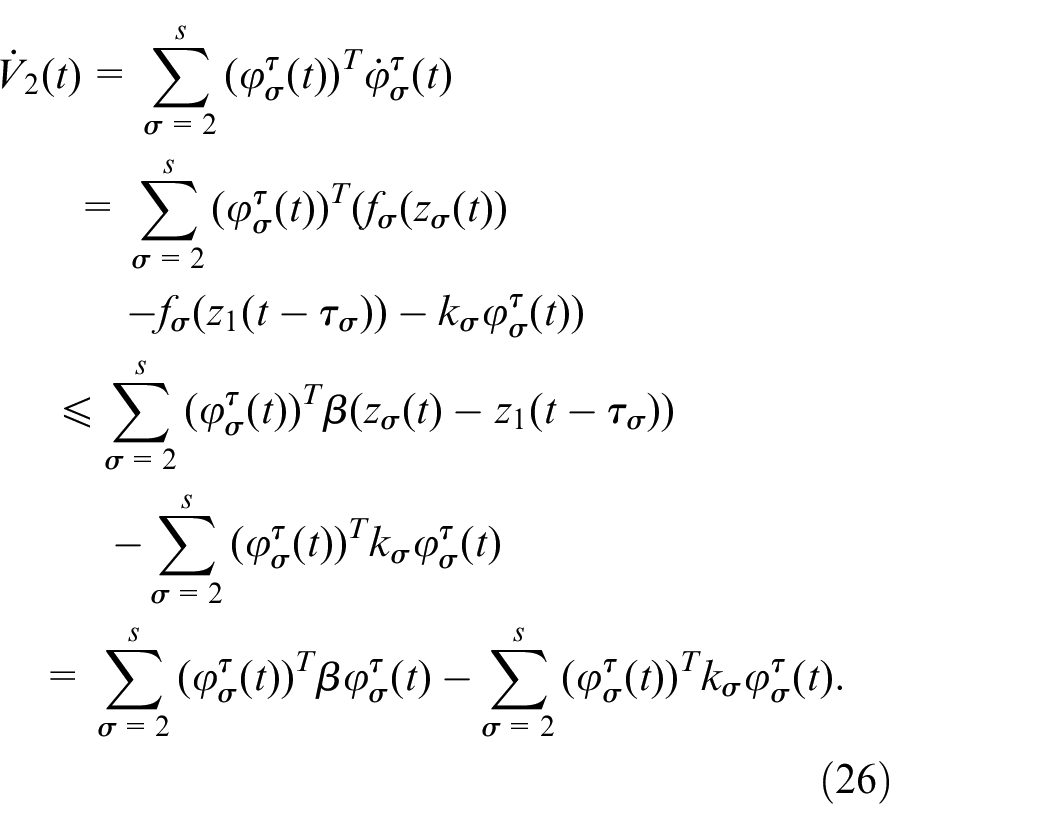
Let

Thus

Therefore, according to inequality (23), we can get
The design parameter guidelines of the proposed control scheme are summarized as follows:
(1) Design parameters
(2) Design parameters
(3) Design parameters
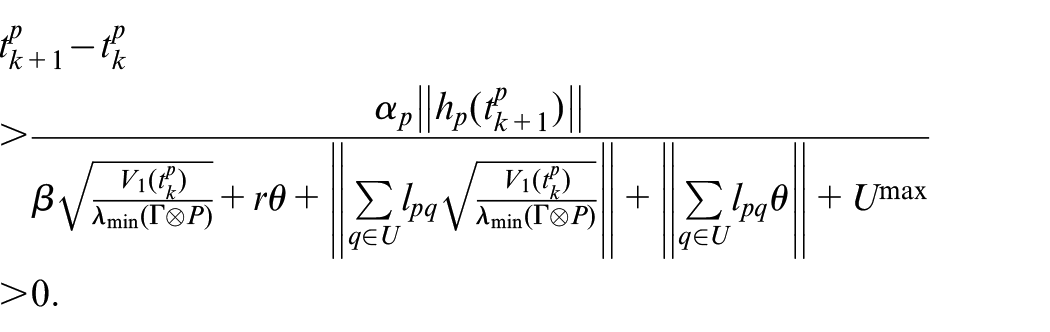
(4) Design parameters the event-triggered mechanism (6) and event-triggered controller (5) satisfy that
Remark 3: For MASs (1) and (2), an event-triggered mechanism (6) is designed under the time-delay in the leaders’ communication network. All agents achieve identical consensus in the same cluster, while any two agents achieve delay consensus simultaneously in different clusters. From the above analysis, we can see the network system can achieve cluster-delay consensus based on event-triggered mechanism.
Numerical simulation
In this section, to verify the effectiveness of the presented method, a simulation example is provided.
A topology consisting of 11 nodes is considered, as shown in Figure 2. The followers are now divided into three clusters, namely
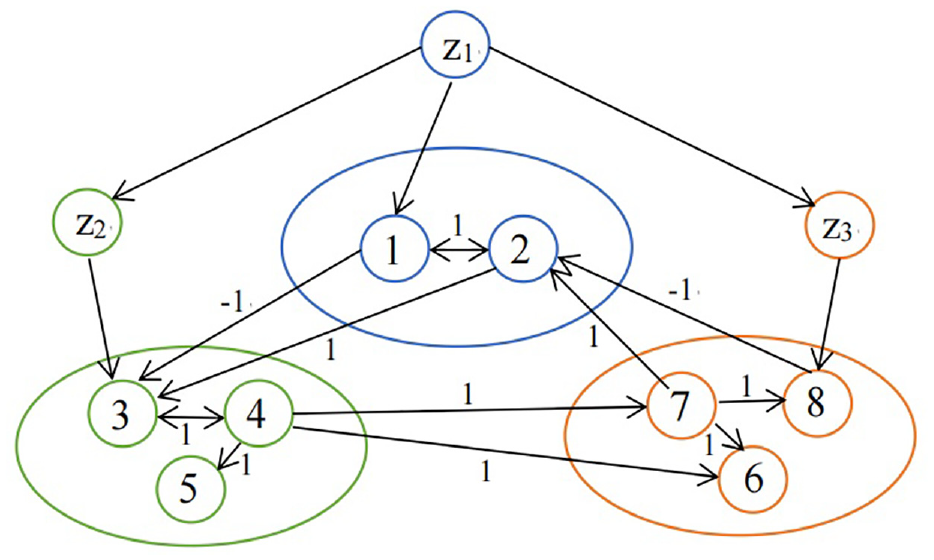
Network topology of MASs with eight followers and three leaders.
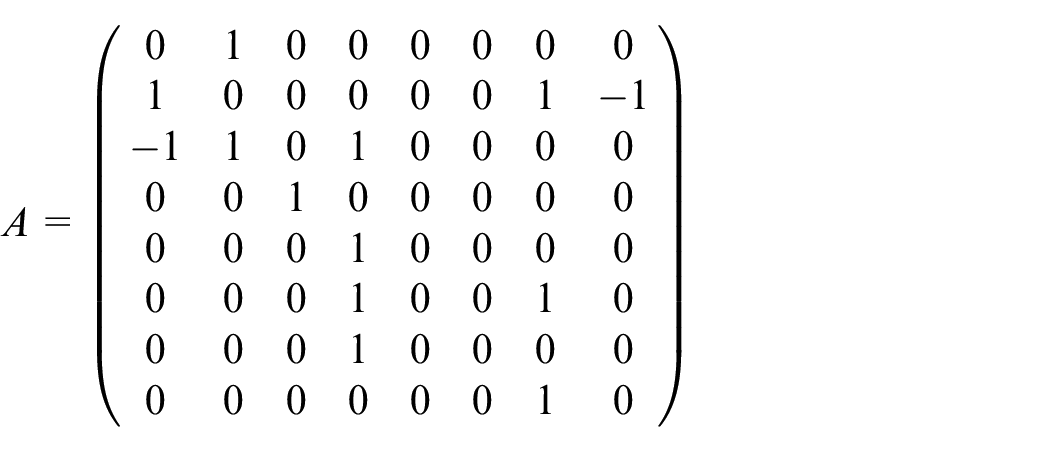
From Figure 2, the adjacency matrix is shown as
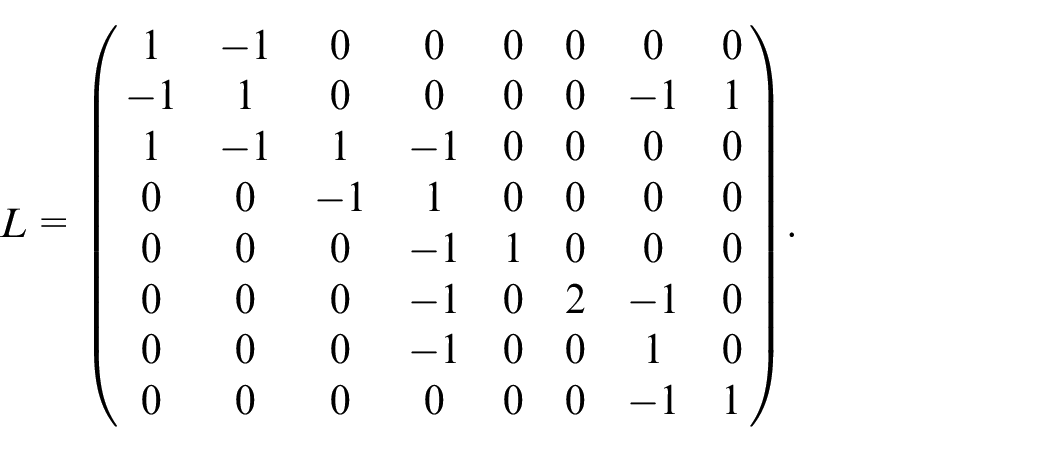
and Laplacian matrix is
Suppose that the nonlinear parts of the network system are
Figure 3 shows the tracking trajectory of eight agents, it is obtained that the same control goal is reached in the identical cluster, and the states of different clusters also achieve the same control goal, indicating that the leader-following cluster consensus control objective based on event-triggered mechanism can be realized for nonlinear MASs.
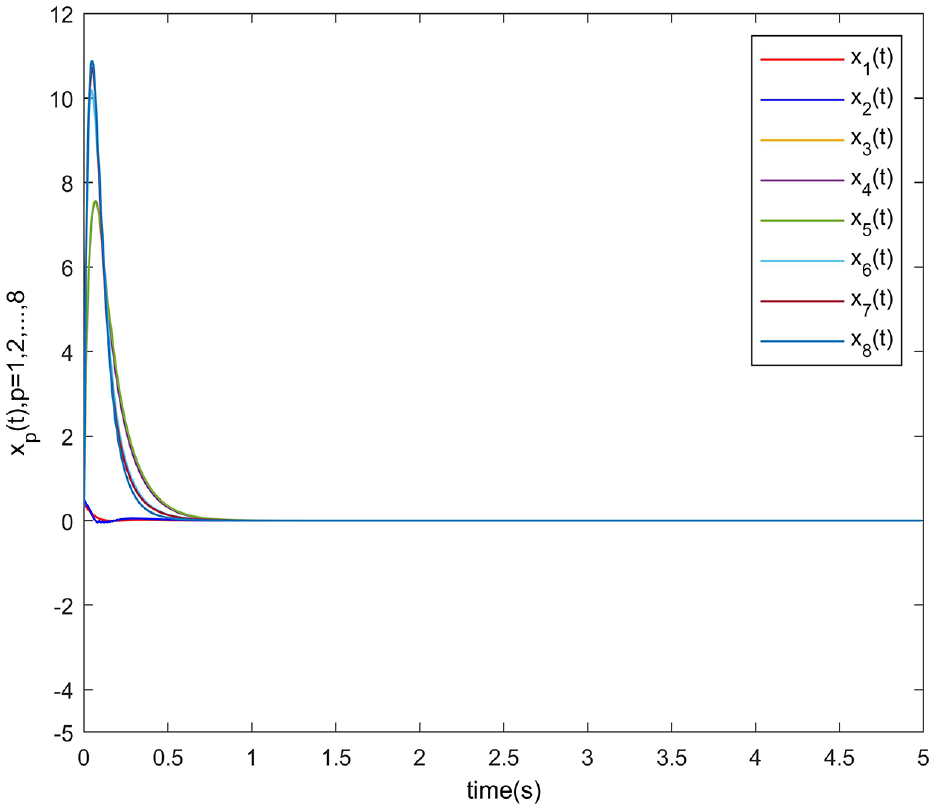
Graphical representation of the states of eight agents.
Figures 4 to 6 show the evolution of tracking errors
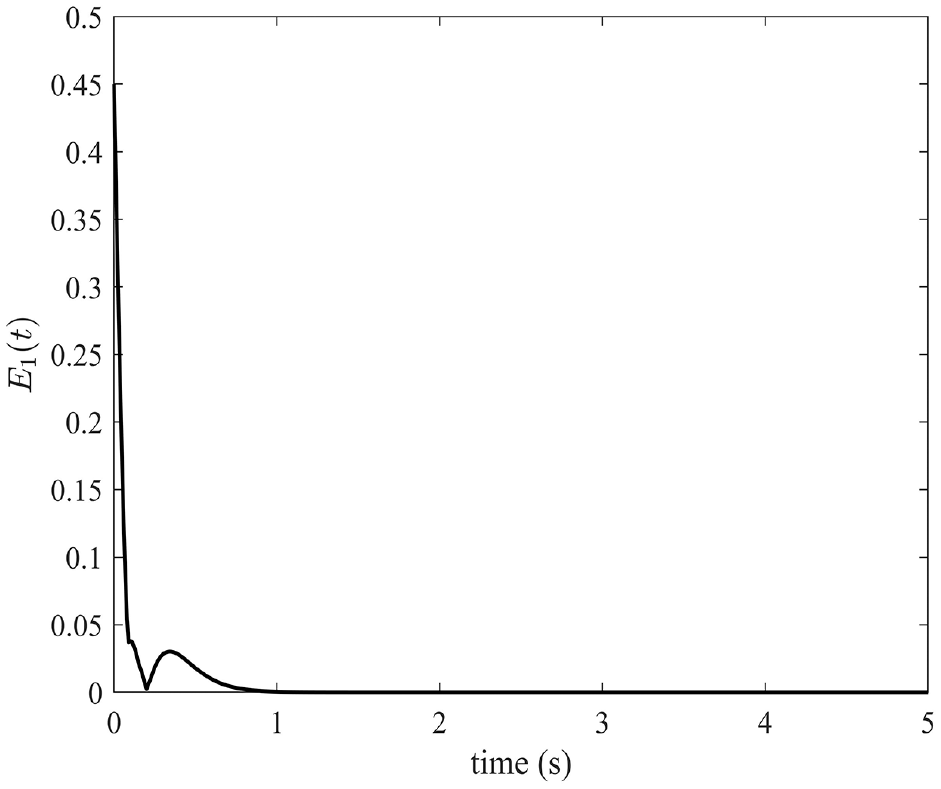
Evolution of tracking error for the first cluster.
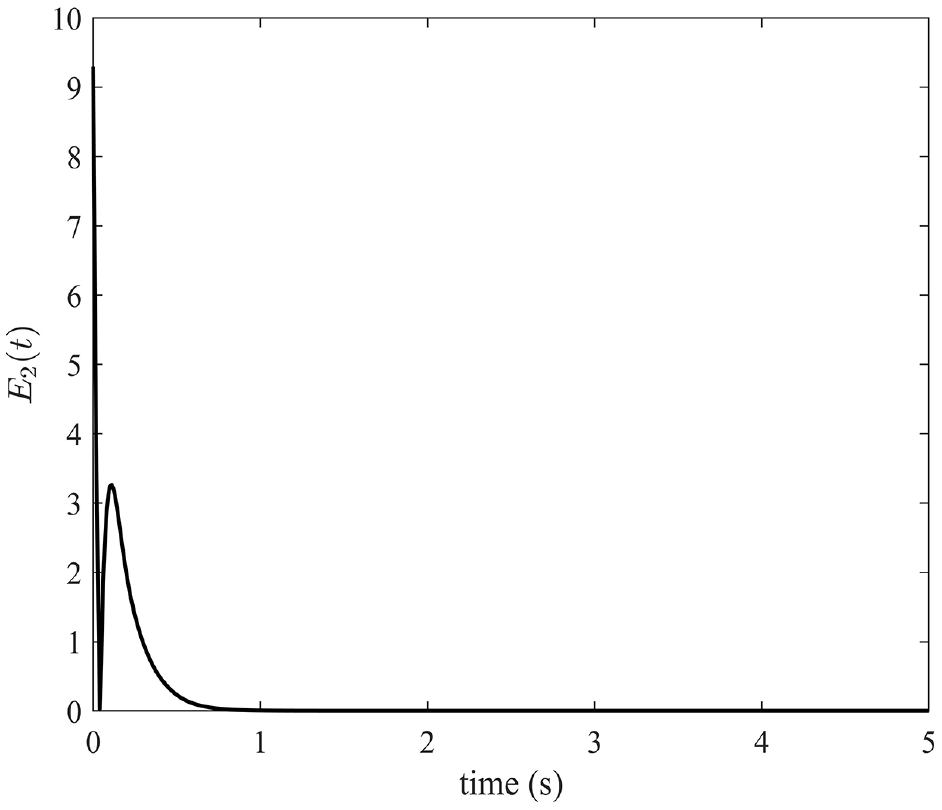
Evolution of tracking error for the second cluster.
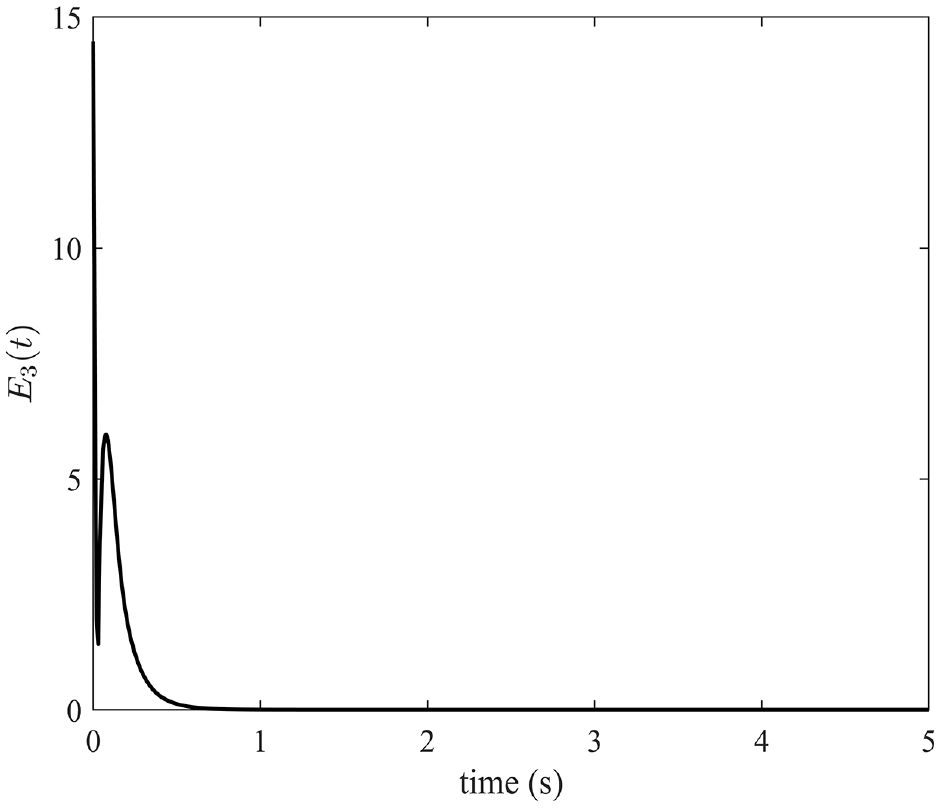
Evolution of tracking error for the third cluster.
Figures 7 to 9 exhibit the trigger intervals of the
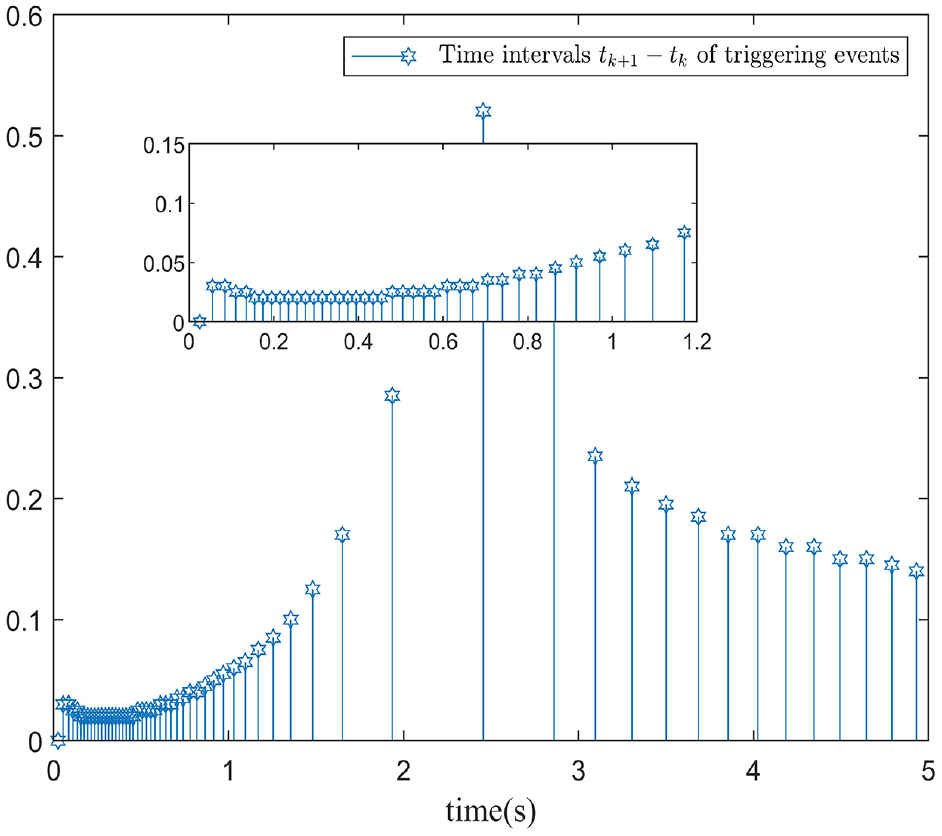
Triggered interval of the first agent.
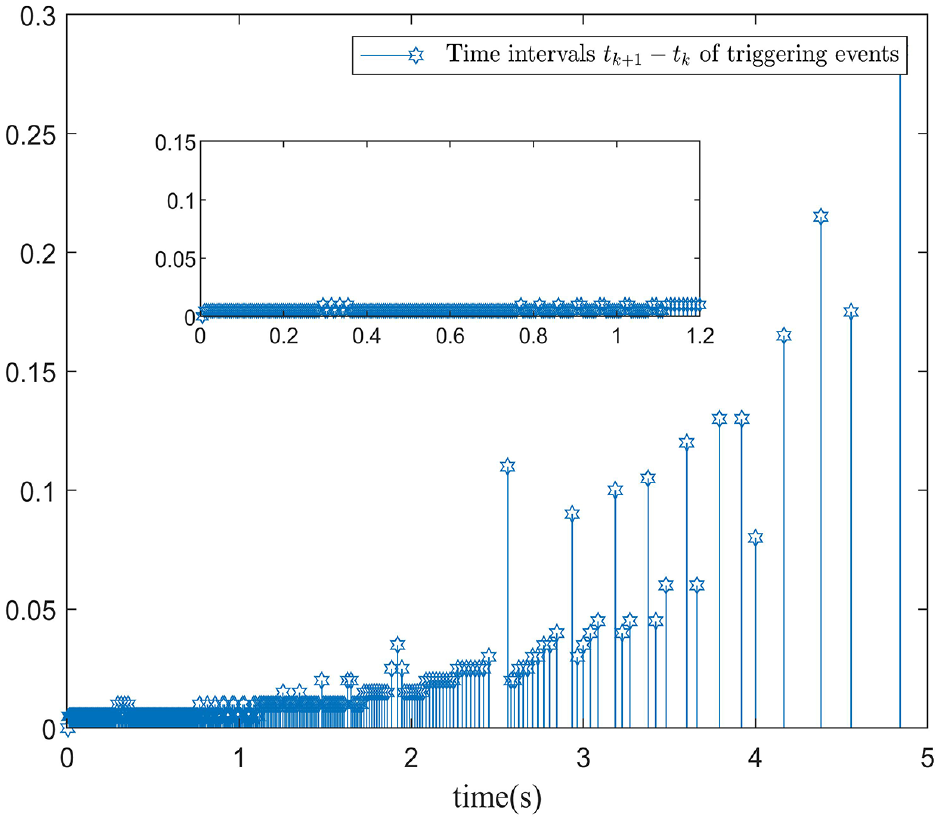
Triggered interval of the third agent.
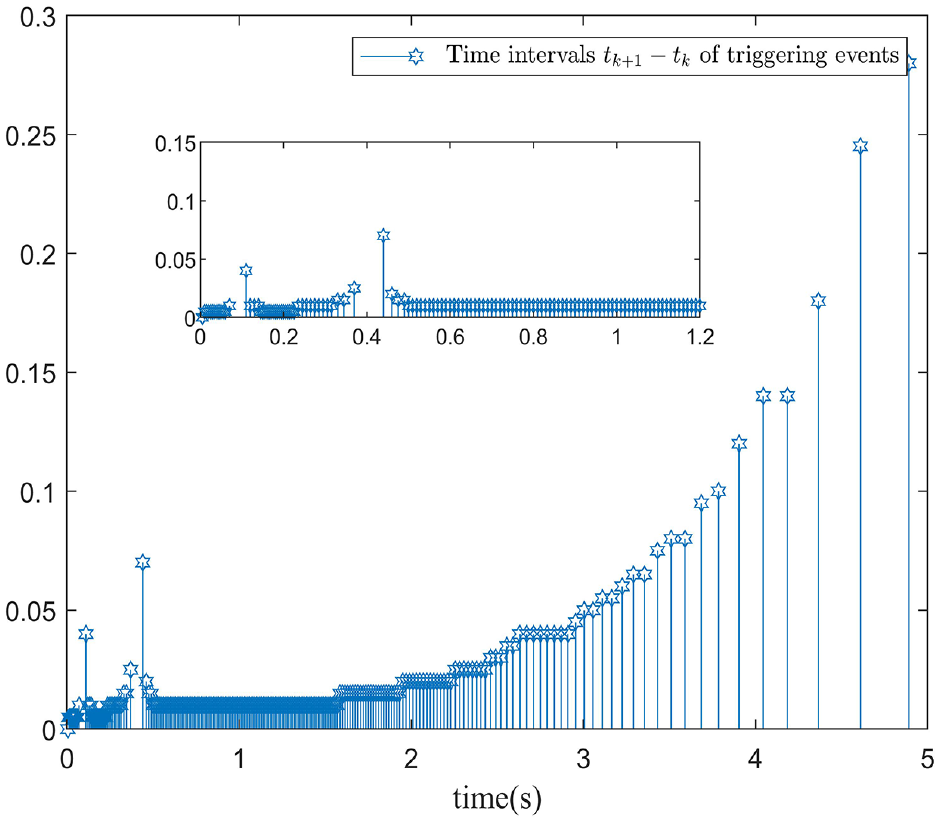
Triggered interval of the seventh agent.
Figure 10 displays the control inputs of eight agents. We can observe that the control inputs are only updated at the triggered time, thus it can reduce continuous communication and avoid resource waste.
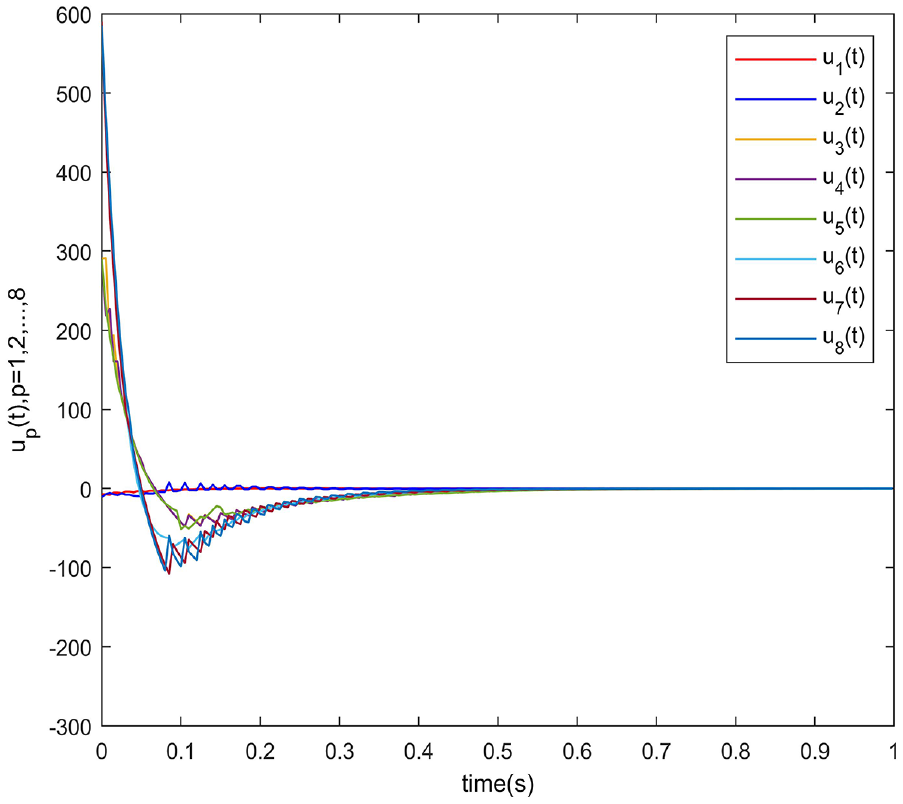
The control inputs of eight agents.
In Figures 11 and 12, we can see
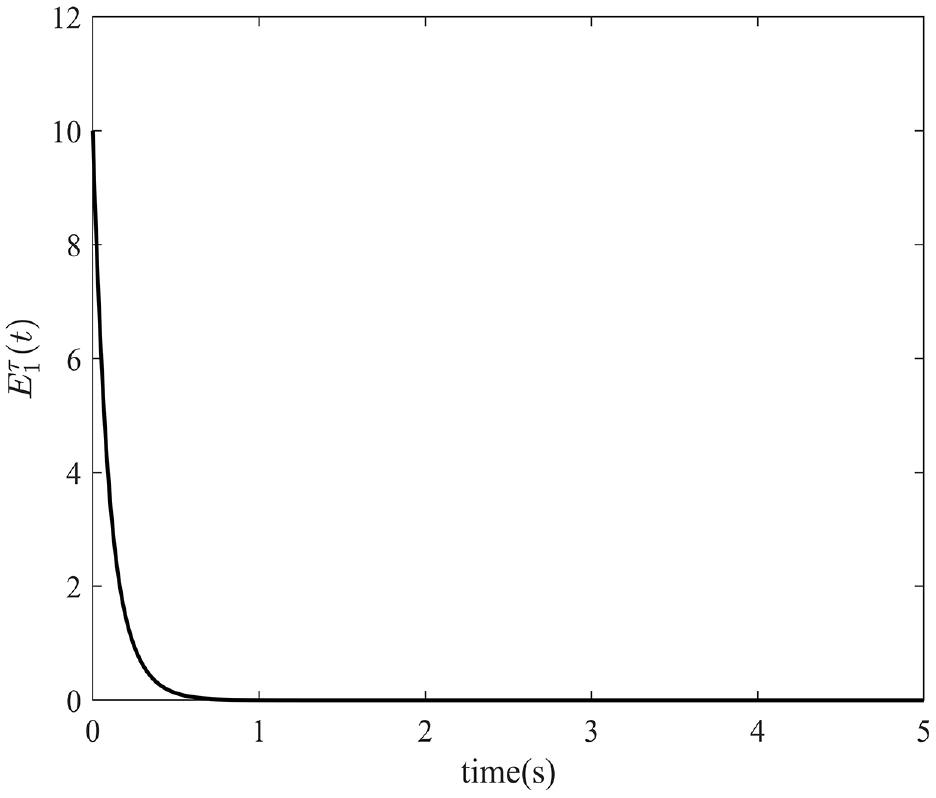
Evolution of lag error
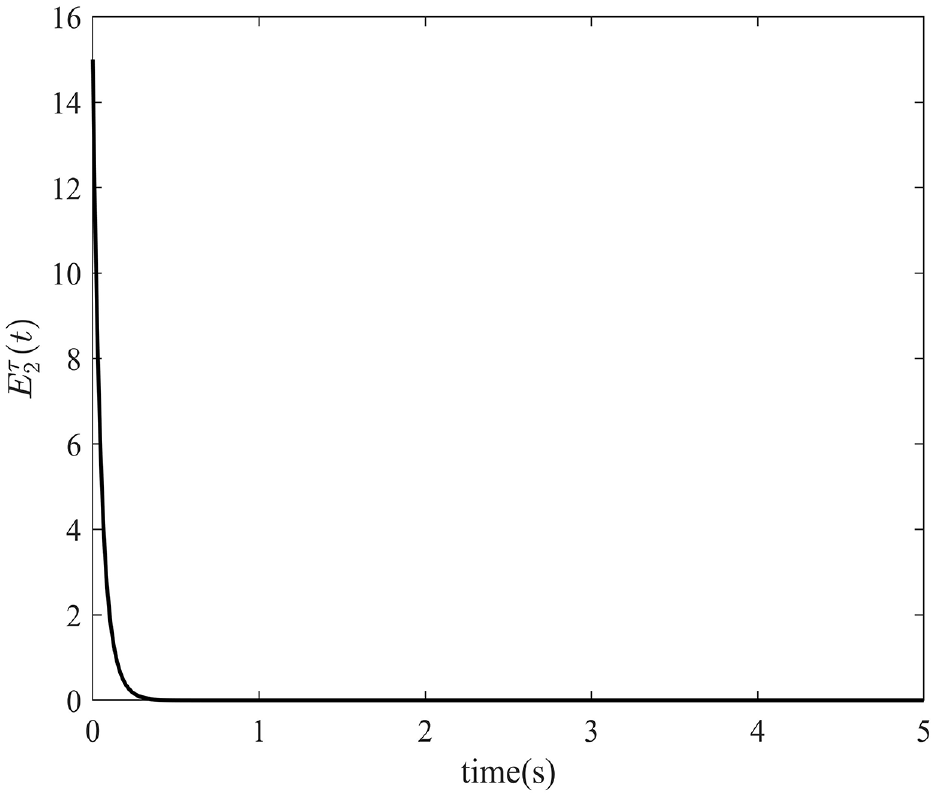
Evolution of lag error
Conclusion
In this paper, the event-triggered-based cluster-delay consensus control problem has been investigated for leader-following first-order nonlinear MASs. An event-triggered-based cluster consensus control algorithm with time-delay has been proposed within the framework of Lyapunov function stability theory and event-triggered mechanism. The proposed control method not only solves the event-triggered cluster consensus control problem for the leader-following nonlinear MASs with leader-delay, but also guarantees the stability of the MASs. Furthermore, this can effectively reduce amount of communication and avoid Zeno behavior. A simulation example verifies the effectiveness of the obtained results. Since the state of the system is often unmeasurable, and this paper does not consider the situation of follower-delay, our research will focus on the output feedback cluster control for nonlinear MASs and the cluster consensus control for MASs with follower-delay in the future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under Grant U22A2043.