
Abstract
To enhance the anti-inertia disturbance ability of permanent magnet synchronous motor (PMSM) speed system, an adaptive sliding mode control with inertia identification is proposed. A novel sliding mode control (NSMC) based on a new reaching law coupled with model reference adaptive system (MRAS) inertia identification is realized the adaptive control, named MRAS+NSMC. In the NSMC construct process, an integral sliding mode surface and a variable speed reaching law are introduced to avoid speed differentiation and improve dynamics, respectively. And the new reaching law imported a successive sigmoid(s) to replace the traditional sign(s) to suppress chattering phenomena. For the problem that the performance deteriorated by rotational inertia variation caused by load changes, the inertia is estimated in real time according to the MRAS theory, and the identification value is updated to the NSMC controller to realize adaptive MRAS+NSMC speed control. Experimental results show that the proposed adaptive MRAS+NSMC control has a faster speed response, and the speed response time is reduced from 85 to 49 ms compared with conventional SMC control. In addition, it has strong robustness to inertia disturbances and high speed tracking accuracy. Compared with conventional SMC, the speed tracking accuracy of proposed MRAS+NSMC is increased from 12% to 4%. This makes the proposed MRAS+NSMC control has great potential practical significance for speed control of PMSM.
Keywords
Introduction
Permanent magnet synchronous motor (PMSM) has been widely used in pounds of industrial fields due to its small size, high efficiency and good speed regulation.1–3 But in the actual operation of PMSM, the load torque and rotational inertia will change frequently, which will affect the performance of the control system. 4 In order to achieve high performance, it is necessary to improve the robustness to parameter changes and enhance the anti-interference abilities of the system. In this case, many advanced theories are used to research the performance improvement of PMSM control system. Some well known methods such as robust control, 5 adaptive control, 6 sliding mode control (SMC),7–9 and intelligent control,10–13 etc. Among these methods, SMC has been widely studied and applied in PMSM control system because of its strong robustness and easy realization.
In Junejo et al. 14 and Xu et al. 15 a fast terminal SMC control based on a novel adaptive terminal reaching technique is proposed. In order to enhance the speed control performance of the PMSM with internal and external disturbances, an extended sliding mode observer (SMO) is designed to estimate the total disturbances and input the signal to a feed-forward compensation controller. A novel discrete compound integral terminal SMC is proposed in Ma et al. 16 and combined with an extended state observer to handle the disturbances. This scheme reduced the output error and enhanced the robustness of PMSM speed system. In Liang et al., 17 an adaptive super-twisting algorithm based SMO for PMSM sensorless control is proposed. Due to voltage source inverter nonlinearity is taken into consideration, the accuracy of PMSM model improved and the position estimation error reduced. For the sake of raising the response performance of PMSM speed system, a SMC control method based on a new sliding-mode reaching law is put forward in Wang et al., 18 which can not only effectively reduce the sliding mode chattering, but also improves the dynamic performance of the speed system.
At present, although these studies have achieved some results, there is still room to improve the control performance. In the SMC, when external disturbance and parameter changes occurred in the system, the switching gain needs to be increased in order to improve the robustness. But increased control gains will result in the inherent chattering phenomenon, which can in turn affect the control performance seriously. This problem can be solved by real-time observation and compensation for system parameters and disturbances by means of parameter estimation and disturbance observation. While, most of the existing literature only consider the influence of load torque on the control performance,19–22 or the influence of inertia on the torque,23,24 without considering the direct influence of inertia on the system control law. In the PMSM servo system, when the load changes, it will cause the change of the inertia, which will change the mathematical model of the system. The inertial control parameters must be modified again, otherwise the servo characteristics will be deteriorated.
In order to improve the control performance of the PMSM speed servo system, and enhance the anti-disturbance of time-varying inertia application, an adaptive sliding mode speed controller with inertia identification based on a new reaching law, named MRAS+NSMC is proposed in this paper. The new reaching law adopts the integral sliding-mode surface and system state variable |s| to improve speed dynamic quality. Beside, a successive sigmoid(s) is used to further reduce chattering phenomena. Based on this reaching law, a novel sliding-mode control (NSMC) of PMSM speed system is developed. For the problem that the performance deteriorated by different inertia of the system due to load changes, the inertia is estimated in real time according to the discrete model reference adaptive system (MRAS) theory, and its identification value is updated to the NSMC controller to realize the adaptive MRAS+NSMC control. The main contributions of this article can be summarized as follows.
(1) To the best of our knowledge, this is the first time that anti-inertia disturbance adaptive sliding mode speed control is applied to the research and exploration for PMSM servo system, which considered the direct influence of inertia variation on the performance of sliding mode speed control.
(2) A novel sliding mode control (NSMC) based on a new reaching law is put forward, and combined with the MRAS inertia identification to realize adaptive MRAS+NSMC control, so as to improve the anti-inertia disturbance ability.
(3) The results of this proposed method are verified by comparative research under different strategies and conditions. Compared with conventional SMC control, the MRAS+NSMC control can quickly and accurately follow the given speed, and has strong robustness to inertia disturbance, improved the control performance of PMSM speed servo system.
The remainder of this article is organized as follows. In Section 2, the NSMC speed controller is designed. The details of adaptive MRAS+NSMC speed control are presented in Section 3. Subsequently, the experimental results are presented in Section 4. And in the final, Section 5 concludes this paper.
The NSMC speed controller design
Novel NSMC controller
The mechanical motion and electromagnetic torque equation of the PMSM can be expressed as follows25–27:
where Te, TL, J,
Take the sliding mode control (SMC) state variable of PMSM system as:

where
Take the derivative of equation (2), and bring equation (1) into it, while ignoring the viscous friction coefficient Bm, the following equation can be get:
Define

In order to make the SMC control stable, avoid second derivative and eliminate steady state error effectively, the integral sliding mode surface is selected. 28 It can be defined as:

where c is integral constant and c > 0.
Normally, the conventional SMC adopts exponential reaching law29–31:

where
However, the conventional exponential reaching law switches to the sliding surface in a banded form, which may cause chattering phenomenon. In order to overcome the shortcomings and improve the dynamic quality, a continuous sigmoid(s) function is adopted to replace the traditional sgn(s) function. Substituted it into equation (6), a novel exponential reaching law can be obtained:

The sigmoid(s) function in the above equation (9) can be expressed as:

where a > 0 is used to adjust the slope of the sigmoid(s) function. Different curves of sgn(s) and sigmoid(s) function are shown in Figure 1.
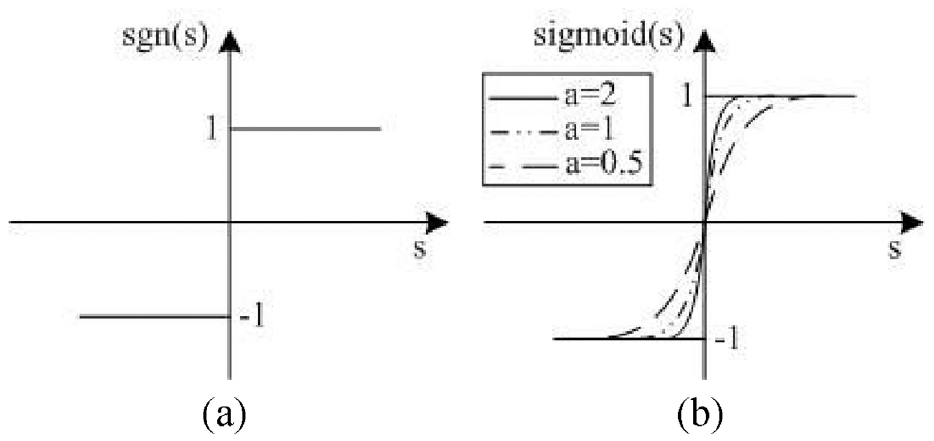
Sgn(s) and sigmoid(s) curves: (a) function curve of sgn(s) and (b) function curves of sigmoid(s).
According to equations (4), (5), and (7), taking TL as the disturbance term, the novel control law of the proposed NSMC controller can be obtained:

Stability analysis of NSMC
In order to verify the stability of the novel exponential reaching law, the Lyapunov function is selected as follows:

Take the derivative of equation (10) to get:

Substituting equations (4) and (5) into equation (11), the following equation can be obtained:

Substituting the proposed NSMC control law shown in equation (9) into equation (12), the following equation can be obtained:
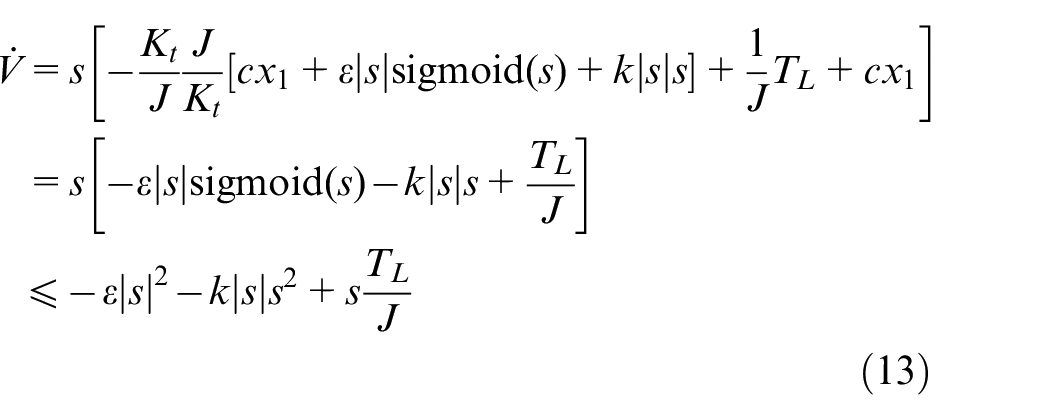
Take the load torque TL as the disturbance term and record

It can be seen from equation (14) that when the control parameter
Adaptive speed control
Adaptive control principle
Generally speaking, the rotational inertia J of PMSM speed control system is often regarded as a known quantity. But in actual, the inertia J varies greatly and cannot be measured directly, which will bring fluctuations to the speed control. Thus in the adaptive control, the on-line inertia identification is introduced into the NSMC to update the inertia value, which will beneficial to improve the control performance. The model reference adaptive system (MRAS) identification method is designed based on the stability theory and is derived from the model reference adaptive control, so it can be used to identify the rotational inertia J online.
According to motion equation (1) and MRAS theory, the reference model, adjustable model, and inertia identification law based on Landau mechanism are established32,33:
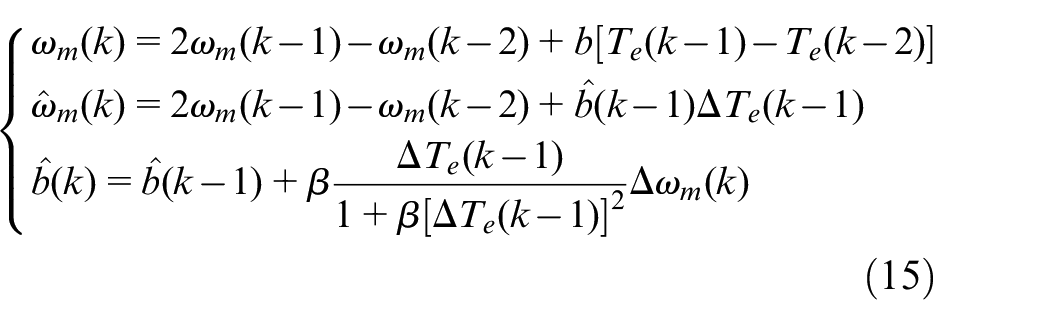
where b is the parameter satisfies b = T/J and
MRAS inertia identification.
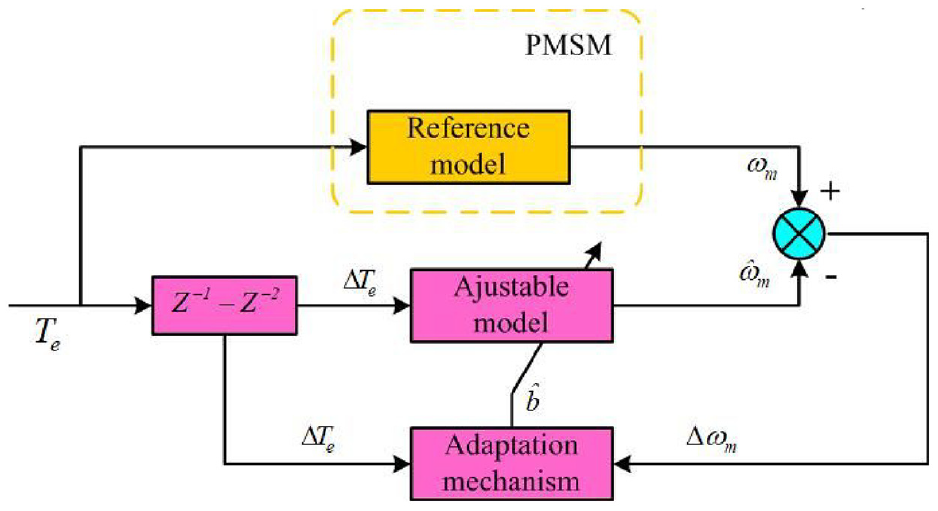
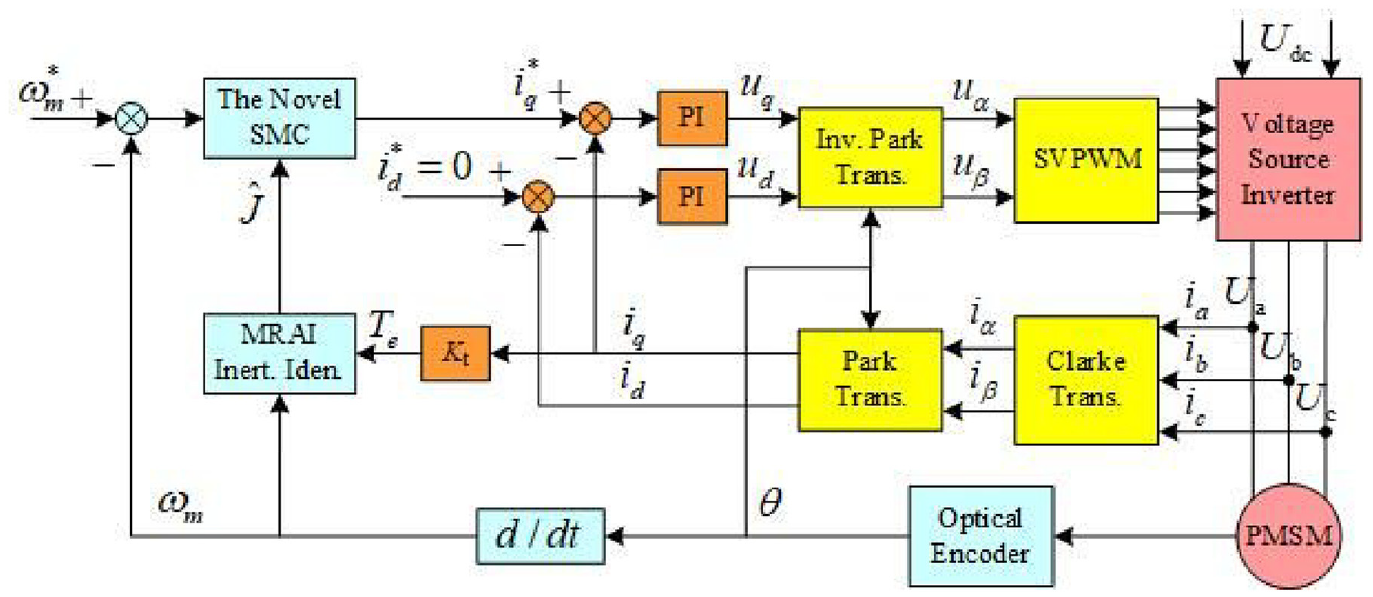
By detecting the mechanical angular velocity and q-axis current, the inertia of the PMSM system is identified by MRAS algorithm. The identification value is fed back to the speed controller, so the inertia parameter of NSMC control is adjusted and updated. In this way, the adaptive speed control, MRAS+NSMC, is realized. The principle of proposed adaptive MRAS+NSMC speed control is shown in Figure 3. Finally, the identification value

MRAS+NSMC speed control.
The procedure of MRAS+NSMC for PMSM speed control is as follows:
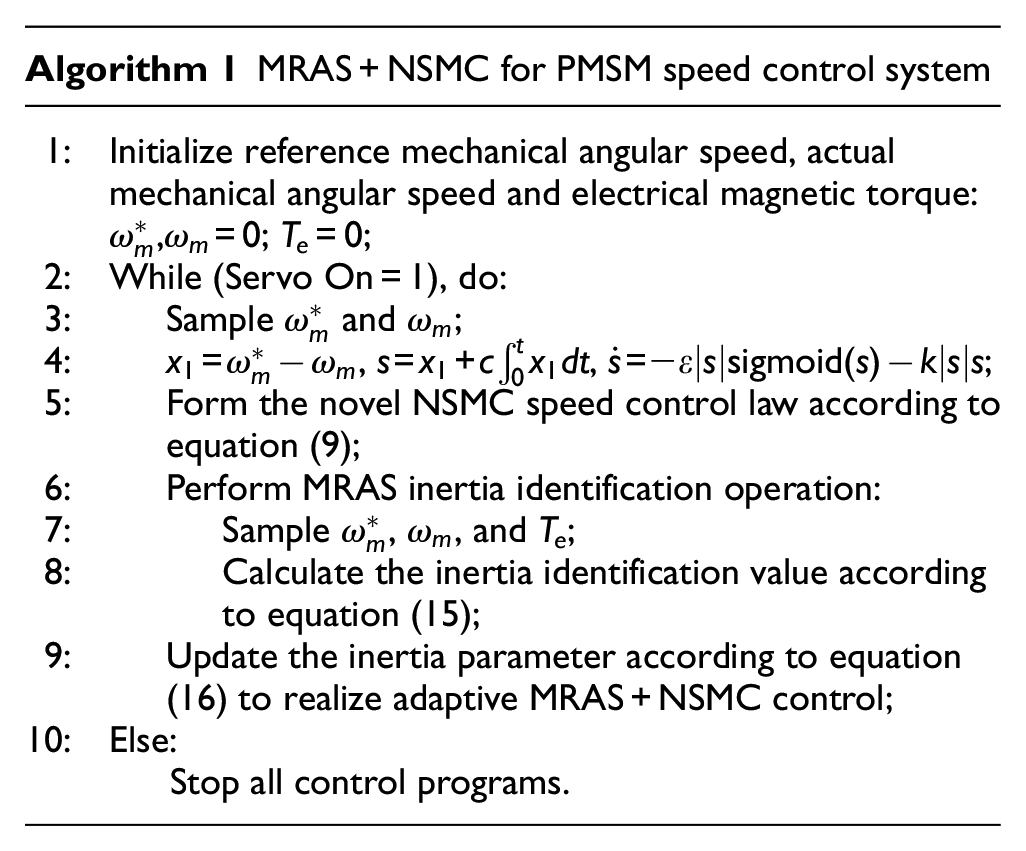
Based on the above outline, we provide the specification of the MRAS+NSMC algorithm for the PMSM speed control system which is shown in Figure 3.
Stability analysis of adaptive control
Just like verifying the NSMC, the stability of the adaptive speed controller also needs to be verified. The Lyapunov function is also selected as follows:

Take the derivative of equation (17) to get:

Substituting equations (4) and (5) into equation (18), the following equation can be obtained:

Substituting the proposed NSMC+MRAS control law shown in equation (16) into equation (19), the following equation can be obtained:
It can be seen from equation (20) that when the integral constant c of the integrated sliding mode surface is large enough to satisfy the condition that
Experiment results
The experiment platform
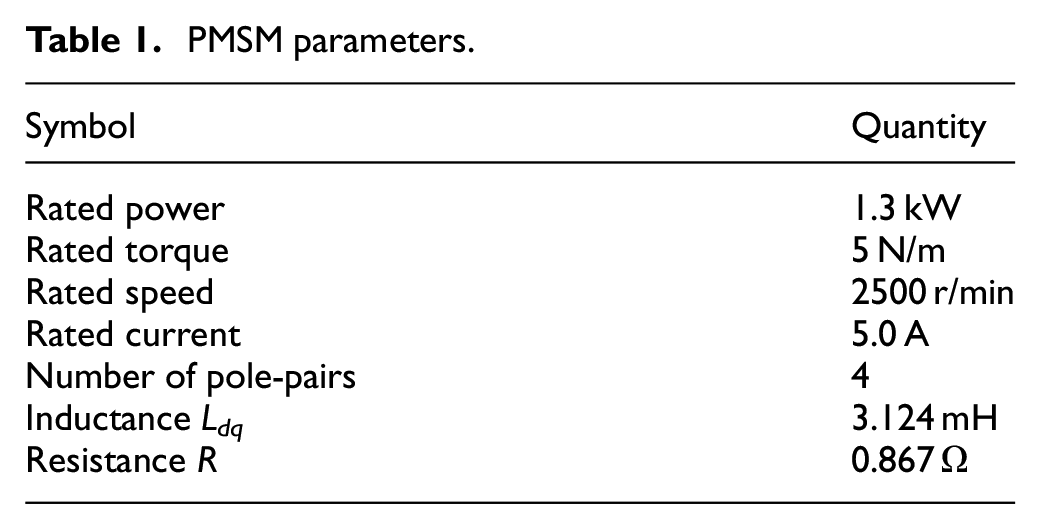
The experimental platform is shown in Figure 4, which including eight parts: PMSM, coupling, speed and torque sensor, magnetic particle clutch, inertia plate, signal generator, power amplifier, and oscilloscope. The servo drive uses TI’s TMS320F2812 as the main control chip, and the control method is programed on CCS5.5. The experimental data is transmitted to a PC by means of communication from the DSP control chip. The DC-link voltage Udc is set as 310 V and the switching frequency fc is set as 8 kHz. The specific parameters of PMSM used are shown in Table 1.
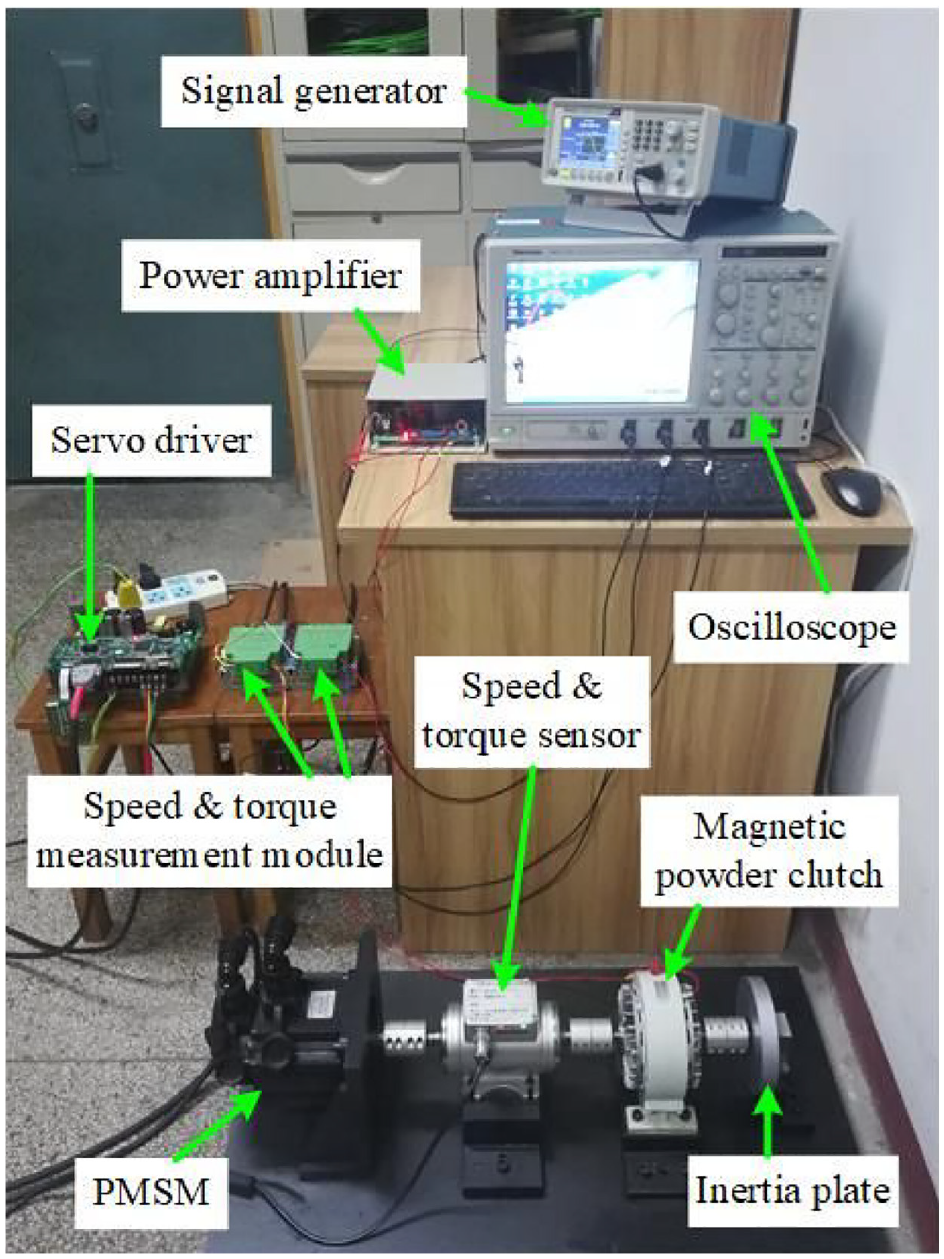
The experiment platform of PMSM.
PMSM parameters.
The PMSM drives the magnetic particle clutch coaxial rotation through the coupling. The signal of the generator is converted by the power amplifier to control the clutch to change the rotational inertia. Oscilloscope is used to display various waveforms. At the beginning, the signal generator has no signal output so the clutch is in the disengaged state. In this state, the PMSM drives the sensor and the front stage of the clutch rotation through the coupling. When the inertia needs to be increased, the voltage signal output by the generator is converted into the current signal by the power amplifier to control the magnetic powder clutch to engage. At this time, the front stage and the rear stage of the clutch realize synchronous rotation.
Inertia identification
Selection of the adaptive gain
The PMSM starts and operates with nominal inertia, and the reference speed is given as a square wave. The amplitude varies from 1000 to 1200 r/min, and the period is 2 s. When the load inertia is not applied to the system, the rotational inertia on the PMSM is the nominal value, including rotor inertia, coupling inertia, sensor rotation axis inertia, and clutch pre-inertia, which is calculated as
Experimental results of different adaptive gain
Experimental data of different adaptive gain
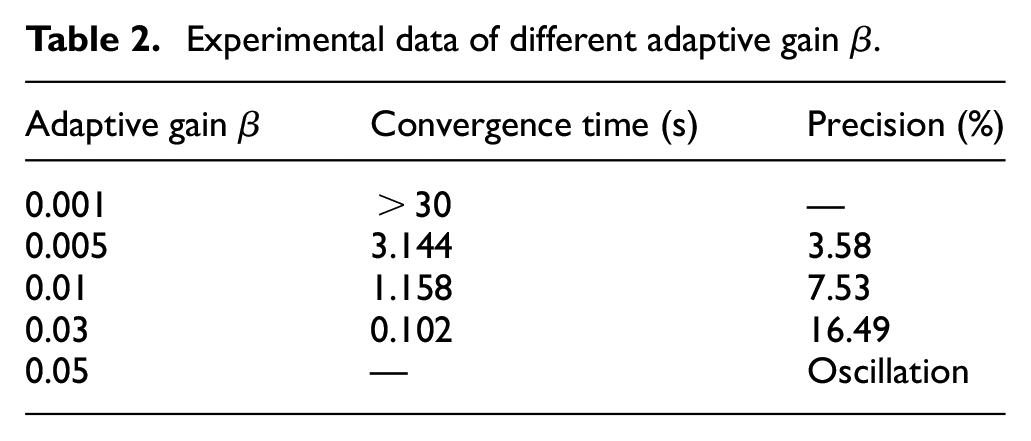
As can be seen from Figure 5 and Table 2, when the adaptive gain
Variable inertia experiment
The PMSM is still running with nominal inertia, and the speed varies between 1000 and 1200 r/min with a period of 2 s. Make the signal generator output a control signal to achieve a sudden increase in the inertia of the system. At this time, the rotational inertia on the PMSM includes rotor inertia, coupling inertia, sensor rotational axis inertia, clutch front inertia, clutch rear inertia, and the inertia of the plate, which is calculated to be
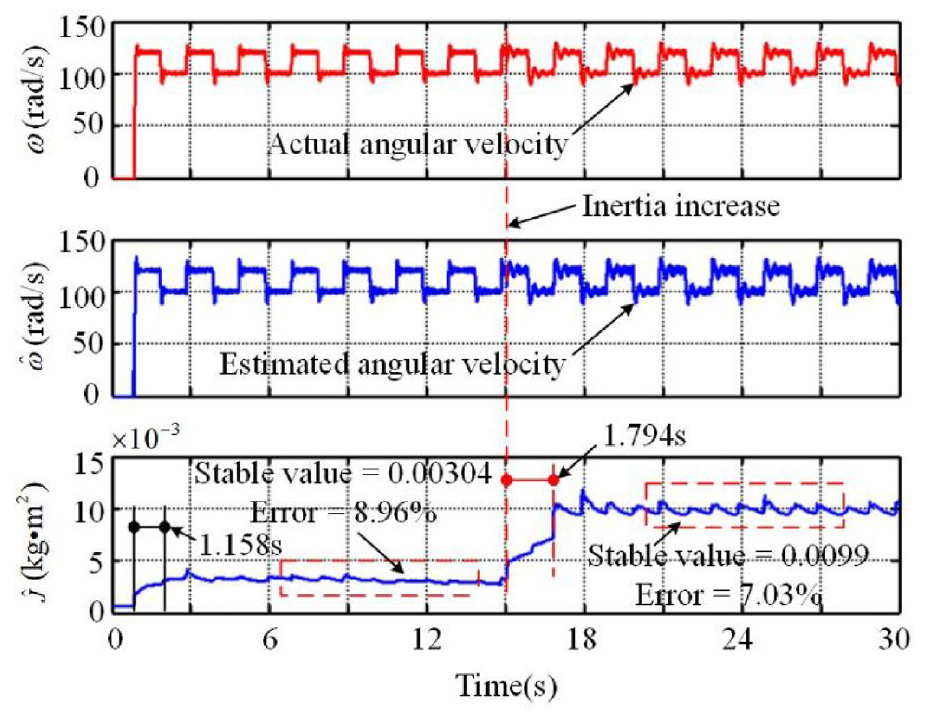
Variable inertia experiment.
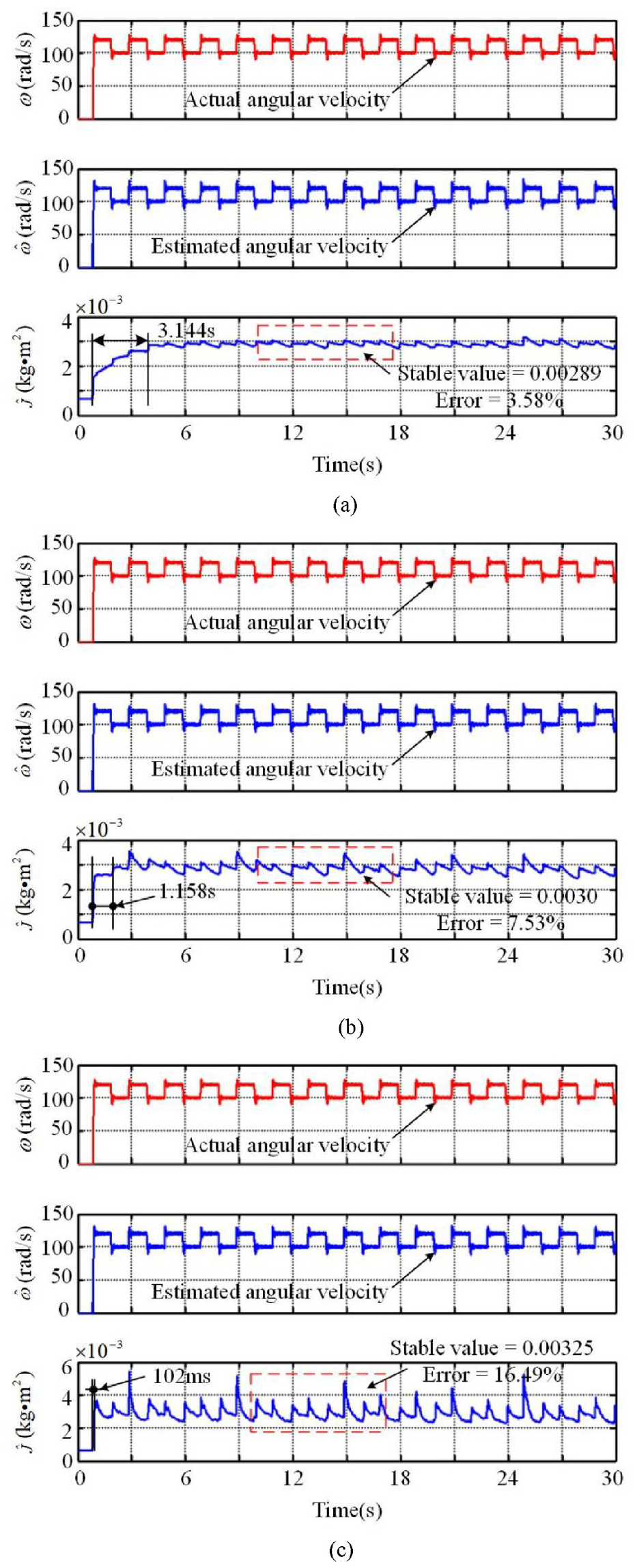
From the above experimental results, it can be seen that the MRAS inertia identification method adopted can carry out real-time and accurate inertia identification for both fixed and variable inertia system, and can provide parameter update for the servo control to a certain extent.
Adaptive control experiment
In order to illustrate the effectiveness of the proposed method, the performance of the existing traditional SMC control, the novel sliding mode control (NSMC) based on the new reaching law and the adaptive sliding mode control with inertia identification based on the new reaching law, named MRAS+NSMC, were compared. And all the current loops were PI controllers with the same parameters.
The reference speed given by the system is 2500 r/min, starting with nominal inertia. Figure 7 shows step response of different control methods. It shows that the traditional SMC speed controller has a response time of about 85 ms and with no overshoot. The NSMC controller adopts the new variable speed reaching law to improve its response speed, so its regulation capability has improved. Its response time is about 62 ms and with no overshoot. While the adaptive MRAS+NSMC controller has the fastest regulation time of about 49 ms, and also has no overshoot. This is because the MRAS method is adopted to identify and update the inertia to the NSMC controller, realized adaptive speed control, reduced the regulation time and improved the dynamic response. At the same speed step given, the adaptive MRAS+NSMC controller shows the fastest response performance.
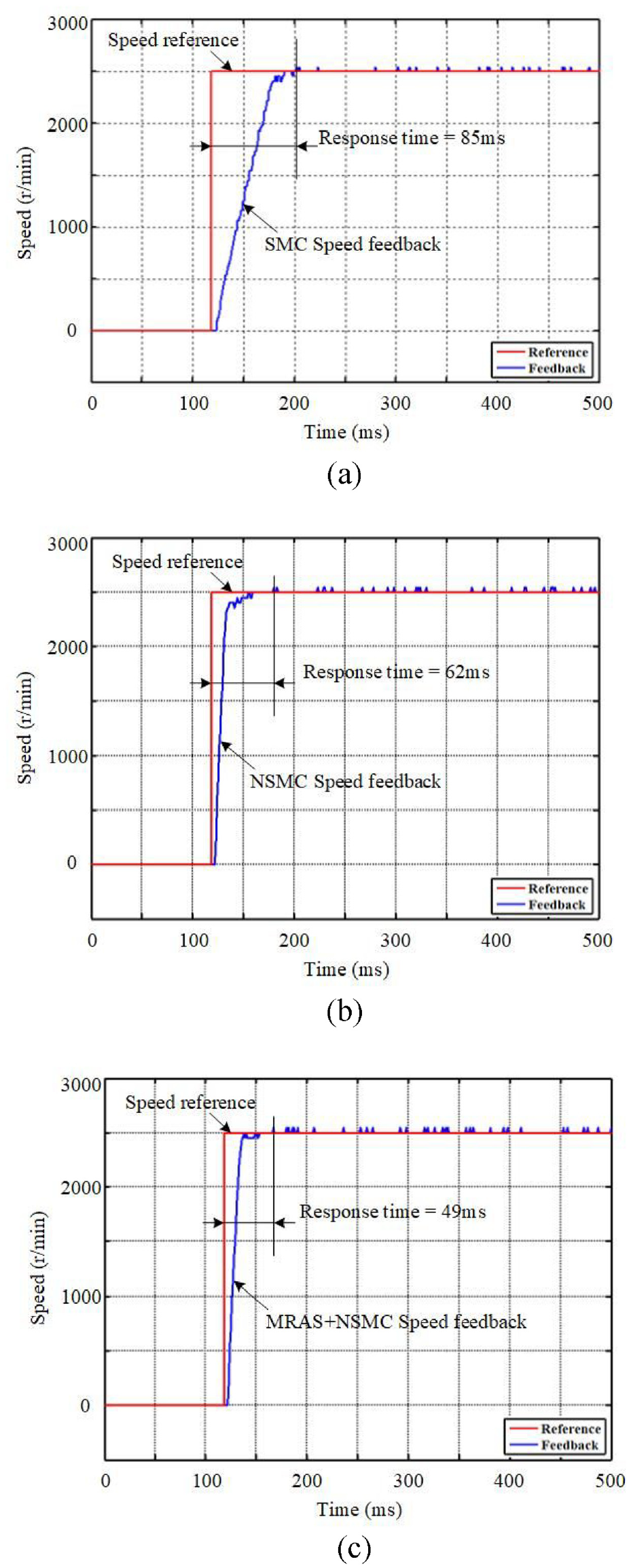
Experimental waveforms of step response: (a) step response of SMC controller, (b) step response of NSMC controller, and (c) step response of MRAS+NSMC controller.
Figure 8 shows the speed waveform of the control system against inertia disturbance under the three control methods. In this experiment, when the motor system runs stably at 1200 r/min, the rotational inertia is suddenly applied, from the nominal value of
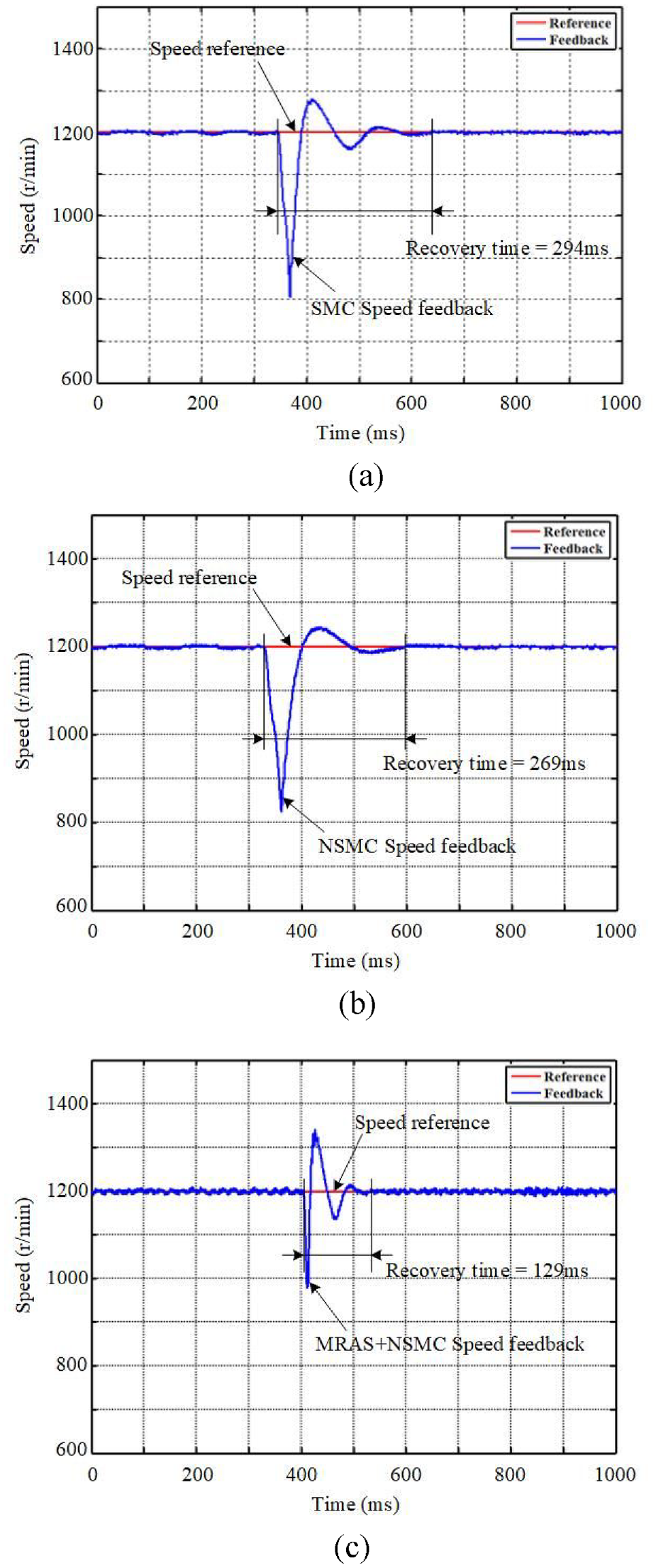
Anti-inertia disturbance speed waveforms: (a) SMC controller, (b) NSMC controller, and (c) MRAS+NSMC controller.
In order to illustrate the self adjustment performance of the proposed control method, the reference speed is set as a sine wave to test the tracking characteristics of the PMSM. The given period of the sine wave is 2 s, and the amplitude varies from 1000 to 1500 r/min. The PMSM with the nominal inertia
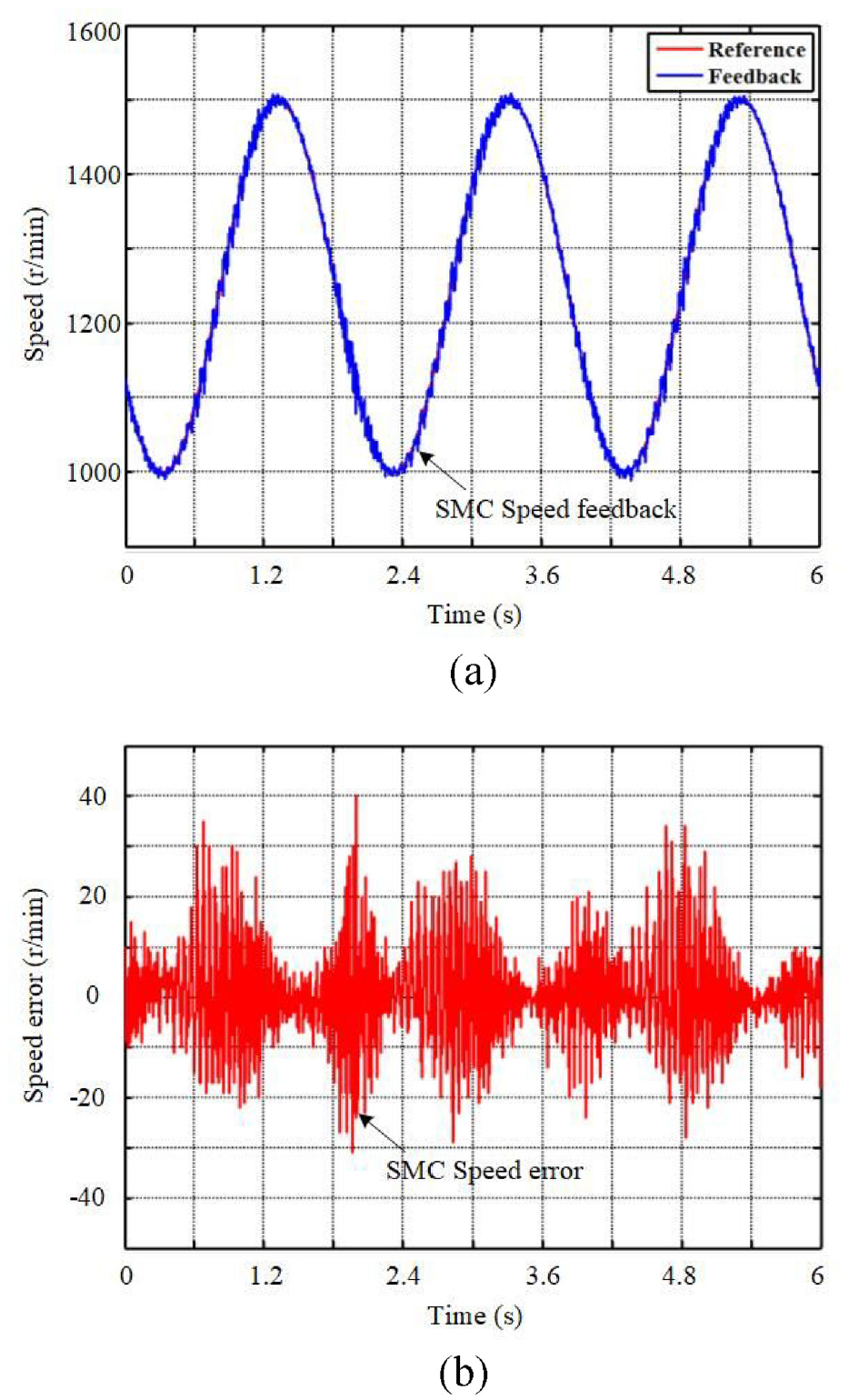
Speed waveforms of SMC controller: (a) sine track of SMC controller and (b) speed error of SMC controller.
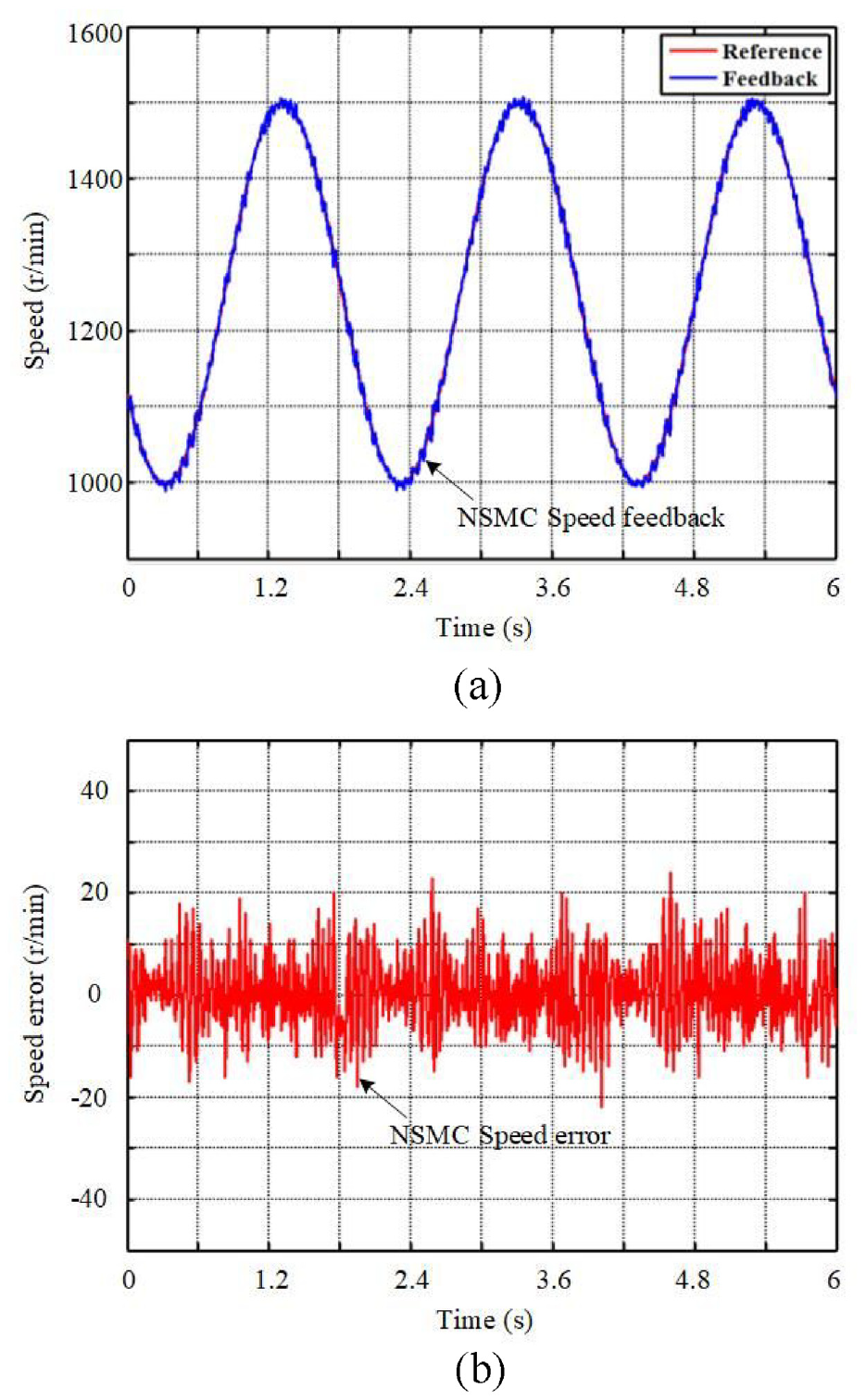
Speed waveforms of NSMC controller: (a) sine track of NSMC controller and (b) speed error of NSMC controller.
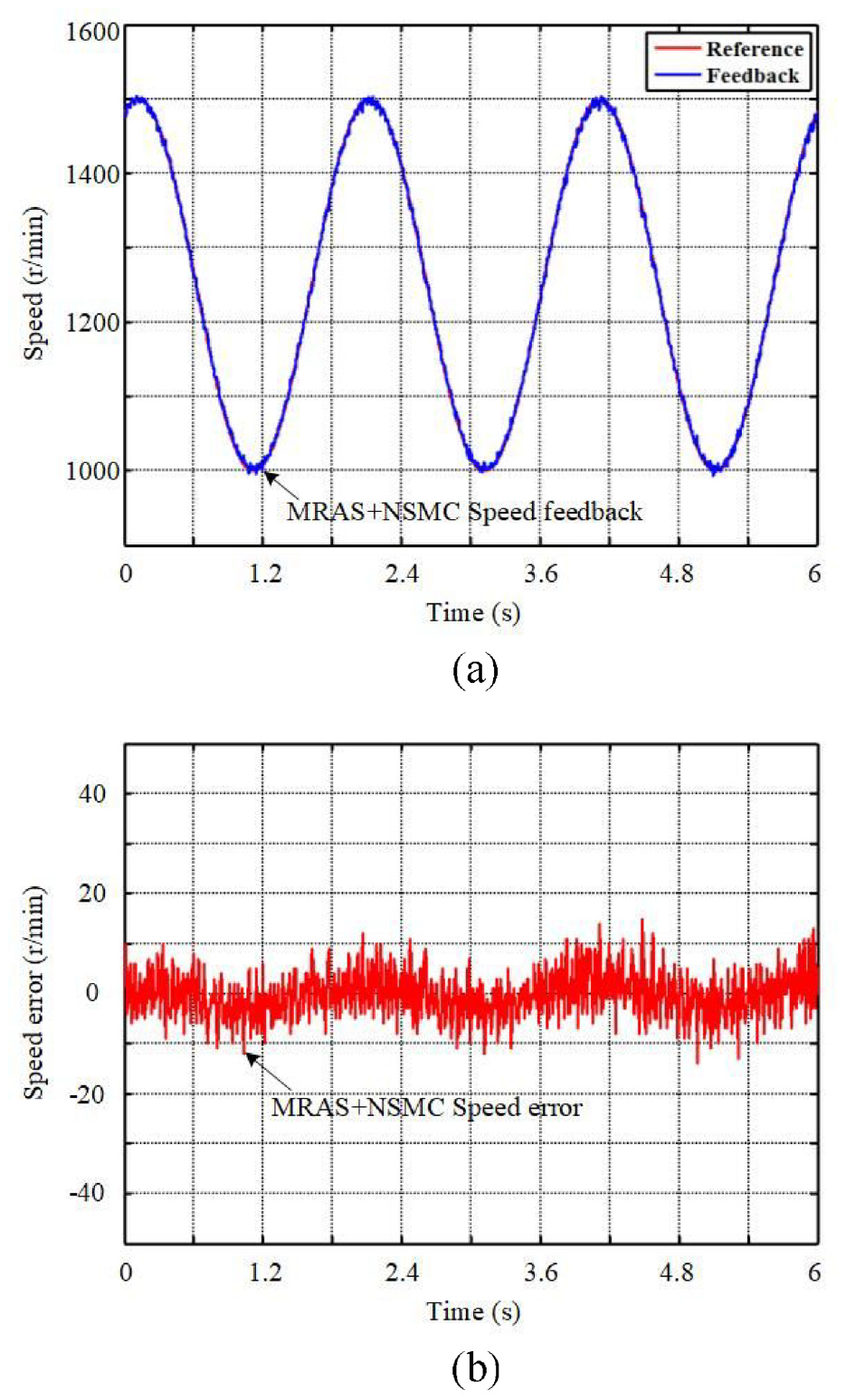
Speed waveforms of MRAS+NSMC controller: (a) sine track of MRAS+NSMC controller and (b) speed error of MRAS+NSMC controller.
From the above experimental results, it can be seen that the adaptive MRAS+NSMC speed control method proposed in this paper can quickly respond and accurately track the given reference speed, obtained better resistance under the same inertia disturbance, enhanced the robustness, and improved the control performance of the PMSM speed control system effectively.
Conclusions
In order to improve the control performance and enhance the anti-inertia disturbance ability of the PMSM speed servo system, an adaptive sliding mode speed control with inertia identification was proposed. The following conclusions are obtained:
(1) A NSMC controller based on a novel reaching law is proposed, and the MRAS inertia identification algorithm is designed. The rotational inertia J is estimated in real time according to the MRAS algorithm, and its identification value is updated to the NSMC controller, so the adaptive MRAS+NSMC speed control realized.
(2) The designed MRAS method could identify the inertia accurately in real time for both the constant inertia and the variable inertia system. The fastest convergence time was 0.102 s, and the corresponding accuracy was 16.49%. The convergence time is 3.144 s when the highest identification accuracy is 3.58%.
(3) The proposed adaptive MRAS+NSMC controller is effective, which can quickly respond and accurately track the given speed, and has strong robustness to inertia disturbance. Compared with conventional SMC control, this proposed method enhanced the anti-inertia disturbance ability and improved the speed control performance of PMSM.
(4) The proposed method has great potential practical significance, and can be used for speed control of PMSM servo system. As the adaptive gain
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by the National Key Research and Development Program of China (2020YFE0205400), the National Natural Science Foundation of China (U1806224 and 51977008), and the Major Science and Technology Projects of Shaanxi Province, China, under Grant S2020-ZDZX-ZNZC-0002.