
Abstract
For the planar robot with underactuated constraints, a stable control method is presented on the foundation of motion planning method and intelligent optimization, which includes two stages. (1) Designing the controllers to control the actuated manipulators to given target states. (2) Planning the motion trajectory combined with the underactuated constraints between all links, using the intelligent algorithm to find the adaptable trajectory parameters, and tracking such planned trajectories to control full manipulators to the given states simultaneously. At last, multigroup simulations demonstrate the validity of the proposed method.
Introduction
For a fully controlled system, if appropriate inputs are selected, it is easy to drive the system to given states in a limited time. 1 But in fact, sometimes, the freedoms of motion are more than control inputs for some systems, making such systems not completely controllable.2–4 Such systems are called the underactuated systems,5,6 which always have nonholonomic constraint.7,8 Underactuated systems are widespread in daily life, such as crane,9–11 helicopter,12,13 quadrotor,14,15 unmanned ship,16,17 soft robot,18,19 underactuated manipulator,20–22 and so on. This kind of system has attracted wide attention because of their light weight, low cost, and energy saving.23,24
The planar underactuated robot is one of the special underactuated systems, whose dynamic model has no gravitational term. The motion regions of the terminal points are all equilibrium points. 25 However, the linear approximation processing model in these points is not controllable. 26 Therefore, the study approaches of the traditional nonlinear systems may not be adapt for the special underactuated systems.
Usually, the number and position of passive joints vary in underactuated robot characteristics. For the planar Acrobot with passive first joint, the control method is presented for achieving its control objective based on its holonomic characteristic. 27 For the planar multiple links underactuated robot with first underactuated link, which is constrained by the angular velocity constraint. Considering the stable control problem of the planar 3-DoF(Degree of Freedom) underactuated robot, 28 researches a switching control strategy. Based on the velocity constraint of the planar underactuated manipulator with multiple links, 29 puts forward a control approach.
As for the planar multiple links underactuated robot with last passive joint, which has the second-order nonholonomic property, 30 transforms planar Pendubot’s model to the nilpotent approximation model, making its control be easier. To solve the control problem of the 3-DoF planar underactuated robot, Arai et al. 31 plans the translation and rotation trajectories. For planar 4-link underactuated robot, 32 discusses its controllability, and the position control problem is solved.
Considering the control problem of planar multiple links underactuated manipulator who has a middle underactuated joint, 33 proposes a piecewise control method via the model degeneration for planar APAA (A is represented Active, P is represented Passive) system. In, 33 the first joint is fixed in the initial position, so the APAA system is degenerated into planar virtual PAA system. Then, the control process of virtual PAA system is divided into two-stage motion process of planar Acrobot. Based on the completely integrable characteristics of planar Acrobot, the angular constraint relationship of planar virtual PAA system can be got. Therefore, the end point can be controlled to reach the target location by the angle constraint relationship. This control method can clearly show the angle constraint relationship between passive and active joints. But this method reduces the workspace of the APAA system.
For planar APAA system, the control approach consisting of three stages is proposed and energy reduction strategy is used to solve control problem. 34 Firstly, the first active joint can be controlled to the target angle and the other active joints keep the initial states, meanwhile the second link angle converges to an intermediate value based on energy attenuation strategy. Hence, the planar APAA system is reduced to planar PAA system. Then, the control of PAA system is divided into two stages of the control of planar Acrobot. According to the angle constraint relation of Acrobot, the control task of each stage can be realized, so we can control PAA system to the target state. Therefore, the end point of APAA system can reach to the target position. Compared with the above method, this method does not reduce the workspace of the APAA system. But there are three stages in this method, which leads to complicated control process. Besides, the energy attenuation strategy cannot always ensure the passive joint to stop.
According to the above analysis, the traditional methods can degenerate the planar APAA system to two-stage Acrobot to get the angle constraint relation clearly. But this control process contains many stages, so the control flow is complicated. Therefore, we propose a control method based on intelligent optimization algorithm. Compared to the traditional method, the method proposed in this paper can simplify the control flow. By using motion planning and differential evolution algorithm (DEA), 35 this paper researches a two-stage control strategy. In first stage, we control the active links reaching the desired target by following the established trajectory, while the passive link rotates freely. In second stage, we plan the trajectory with appropriate parameters based on the DEA for the first active joint. Keeping the non-first active joints in target angles, meanwhile the first active link tracks the established trajectory. Then, all the joints arrive at the established position simultaneously. Finally, we designed several groups of numerical simulation experiments to prove the efficiency of method.
The main innovations of this paper are as follows:
(1) Different from, 33 our method ensures that the end point can reach any position in the working area.
(2) Compared with the three control stages method in Xiong et al., 34 the presented method just needs two control stages.
(3) The presented method is also adaptive for the situation when the initial velocity is not zero.
Dynamic model and characteristics analysis
For the planar APAA underactuated robot, the dynamic equation is given, the constraint characteristics are analyzed, and the control process of the manipulator is depicted.
Dynamical model
The model structure of planar APAA system is shown in Figure 1.
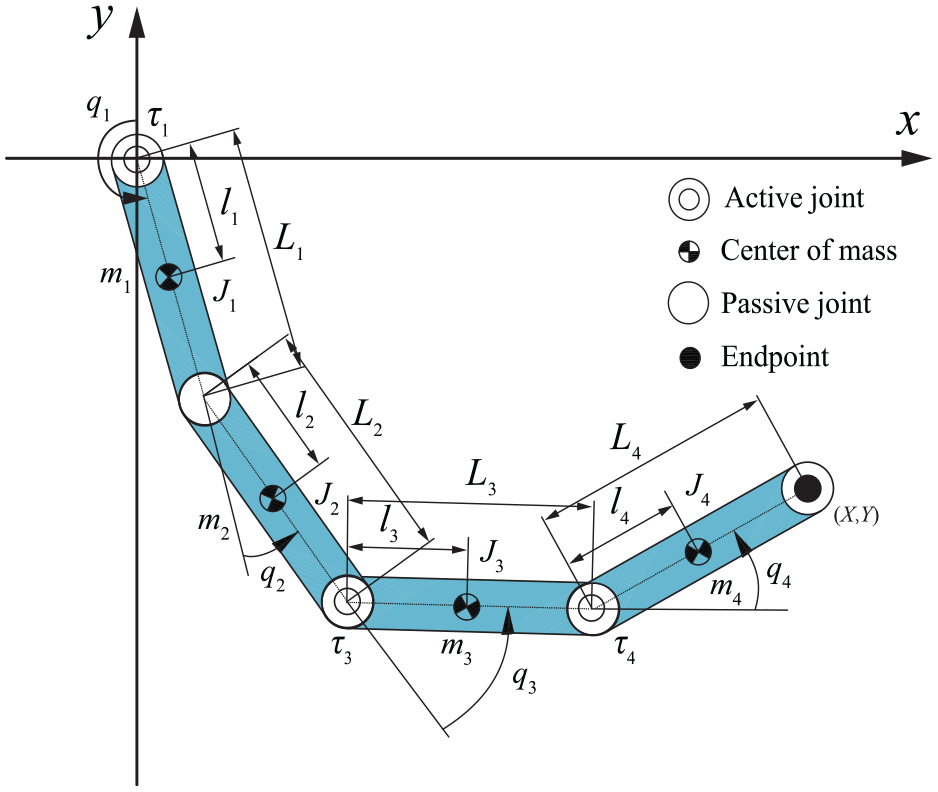
The planar APAA underactuated robot.
The dynamic equation is

where
Let
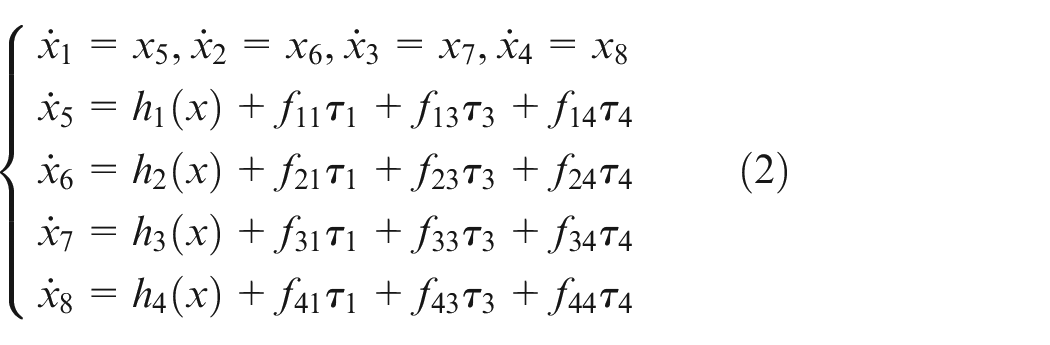
where


Underactuated constraint analysis
In this part, we construct an underactuated constraint equation to describe relationship between underactuated and active links.
We can obtain from (1) that

From (5), the states of underactuated joint can be represented by active joints.
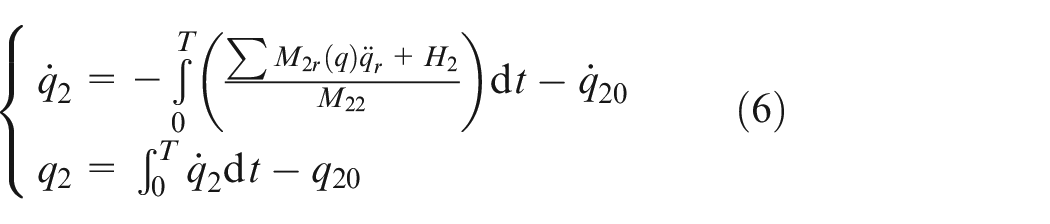
where
Control stages description
The following describes the proposed control strategy with two stages.
In the first control stage, we control the active links reaching the desired target by following the established trajectory, while the passive link swings freely.
In second stage, we plan the trajectory with appropriate parameters based on the DEA for the first active joint. Keeping the non-first active joints in target angles, meanwhile the first active link moves according to the established trajectory. At this time, the underactuated link is suppressed due to (6). Then, all the joints arrive at the established position simultaneously.
The first control stage
In this first control stage, we aim to drive all the active joints to arrive at the designated location, while the underactuated joint is swinging freely simultaneously.
Trajectory planning
This part, the first trajectories
The purpose of designing this trajectory is to make the active joint reach the target position from the initial position. Thus, we design the trajectories based on the initial angle
The description of
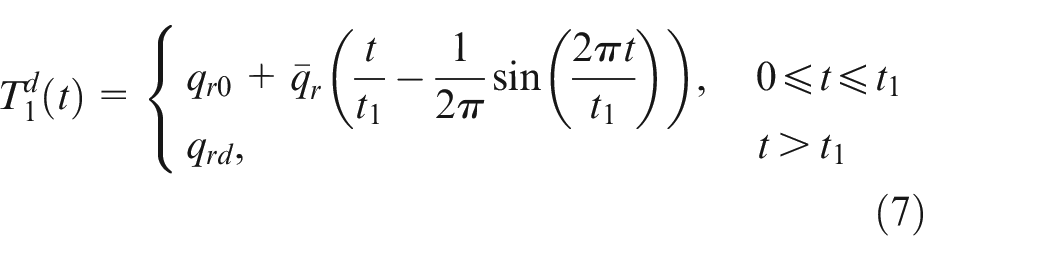
where
The first and second derivatives of


We can get from (8) and (9) that when
In addition, when choosing the different value of
Trajectory tracking controller design
The sliding mode surface we designed is as follows:

and

where
The derivative of

Let

where
The trajectory tracking controllers are devised as

The Lyapunov function is set as:

Time derivative of equation (15) is:

According to the LaSalle’s invariance theorem,
36
The second control stage
In this second stage, we paln the trajectory with appropriate parameters based on the DEA for the first active joint. Keeping the non-first active joints in target angles, meanwhile the first active link moves according to the established trajectory.
Trajectory planning
The trajectory with adjustable parameters is designed for active joints, so that we can calculate the appropriate parameters to ensure the active and passive joints reaching the target states simultaneously under the constraint of underactuated equation.
Thus, we choose the trajectory

where
where
The first and second order derivatives of

Solution of trajectory parameters
With the support of the above analysis, trajectory parameters of
In this paper, we use the algorithm to do the off-line calculation, so, we can solve this optimization problem by using any intelligent optimization algorithm. Here, the DEA algorithm is sufficient for us to obtain the design parameters of the trajectory. Therefore, we simply use the DEA algorithm in this paper.
The objective function is set as

where
The calculation process of parameters based on DEA is:
In this way, we can get trajectory with proper parameters for the first active joint returning to the target angle from
Trajectory tracking controller design
The sliding mode surface that we designed is as follows:

and

where
The derivative of

Let

where
Designing the trajectory tracking controllers as

The Lyapunov function is chosen to be:

Time derivative of (27) is:

According to the LaSalle’s invariance theorem,
Both the above two tracking controllers use the sliding mode strategy. However, their action stages and sliding mode surfaces are different. The first tracking controller act on the first stage and the sliding mode surface is equation (10). The second tracking controller act on the second stage and the sliding mode surface is equation (22).
Simulations
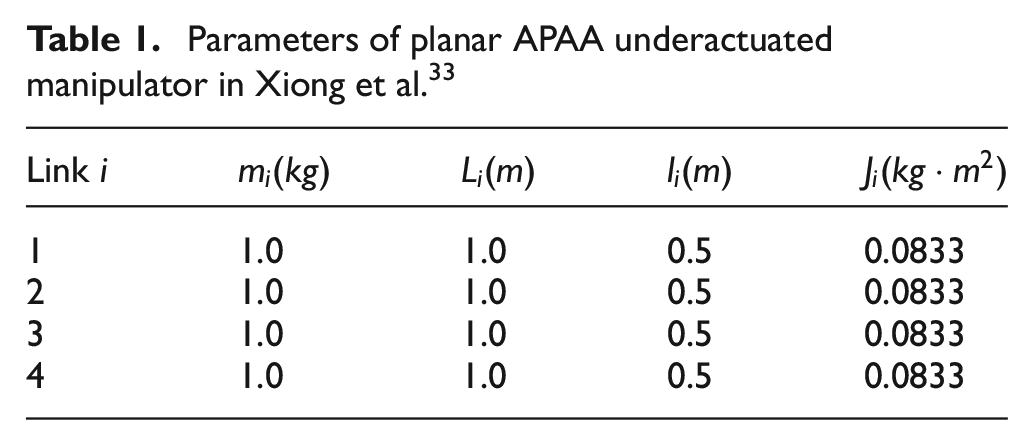
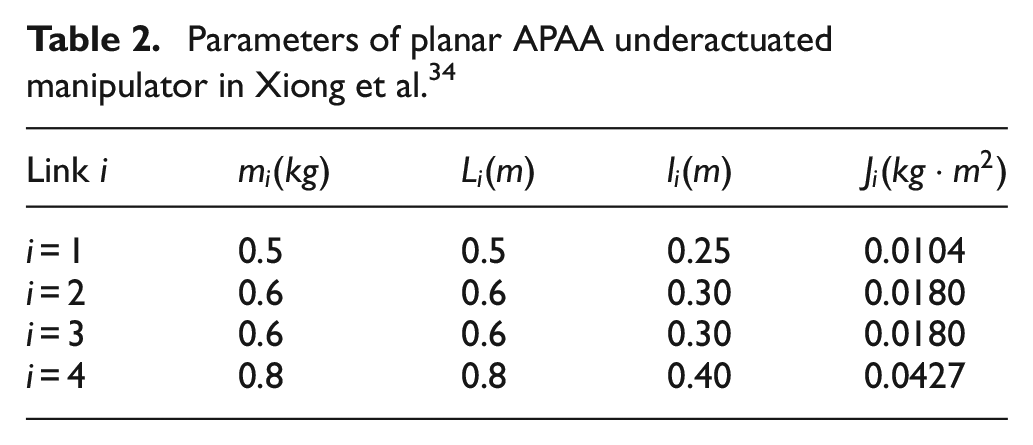
We design multi-group simulation experiment based on MATLAB/Simulink to prove this control method. The structural parameters of planar APAA underactuated manipulator can be seen in Table 1 and Table 2, which are same as 33 and. 34
Parameters of planar APAA underactuated manipulator in Xiong et al. 33
Parameters of planar APAA underactuated manipulator in Xiong et al. 34
We set the parameters of the DEA to be
Situation I: zero beginning velocity
Case A
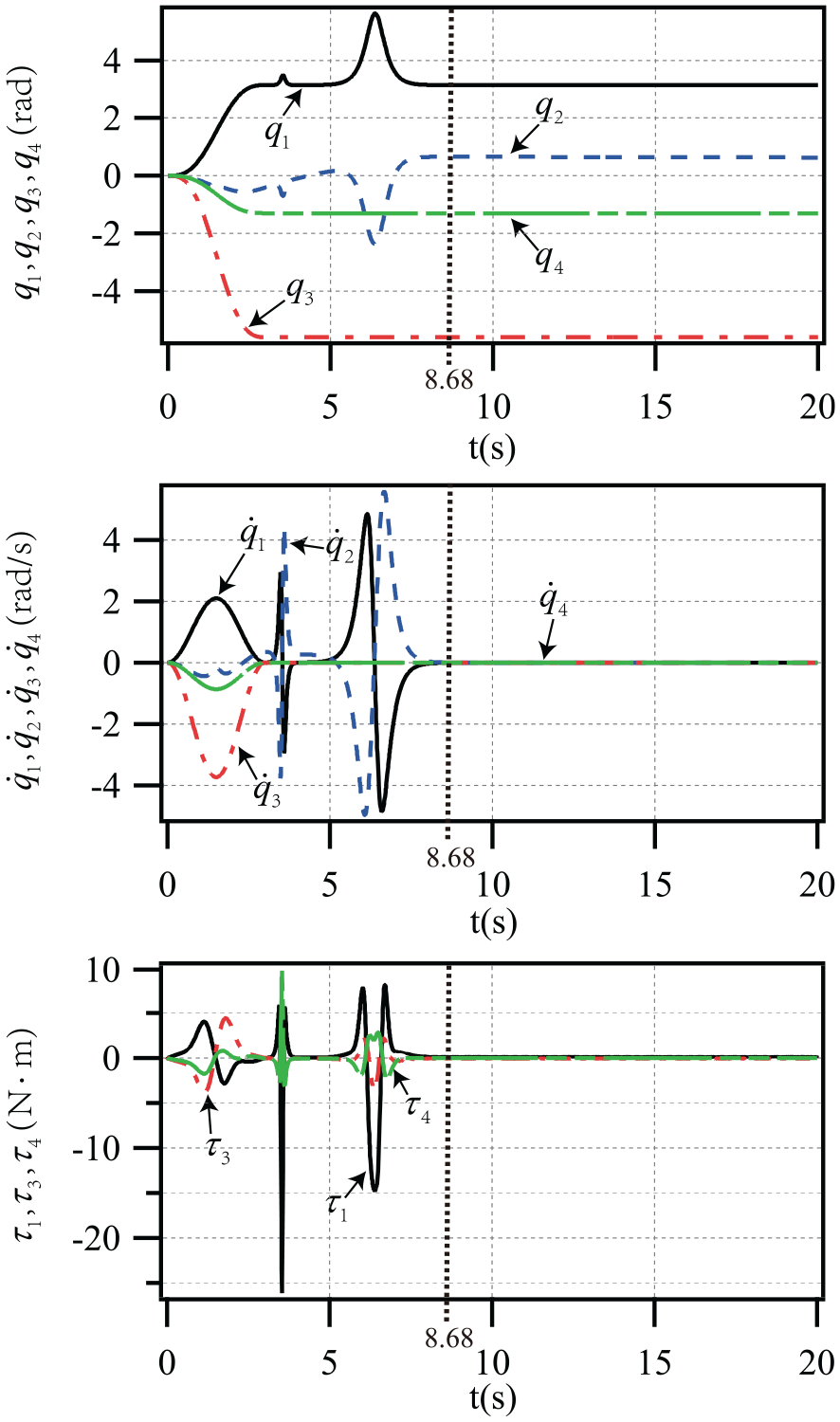
We set initial and final states to be the same as that of 33 :
By using the DEA, the parameters of the second planned trajectory are as follows:
Figure 2 is the result of designed simulation experiment, which shows all links converge to the target value. After
Simulation I results of case A.
Case B
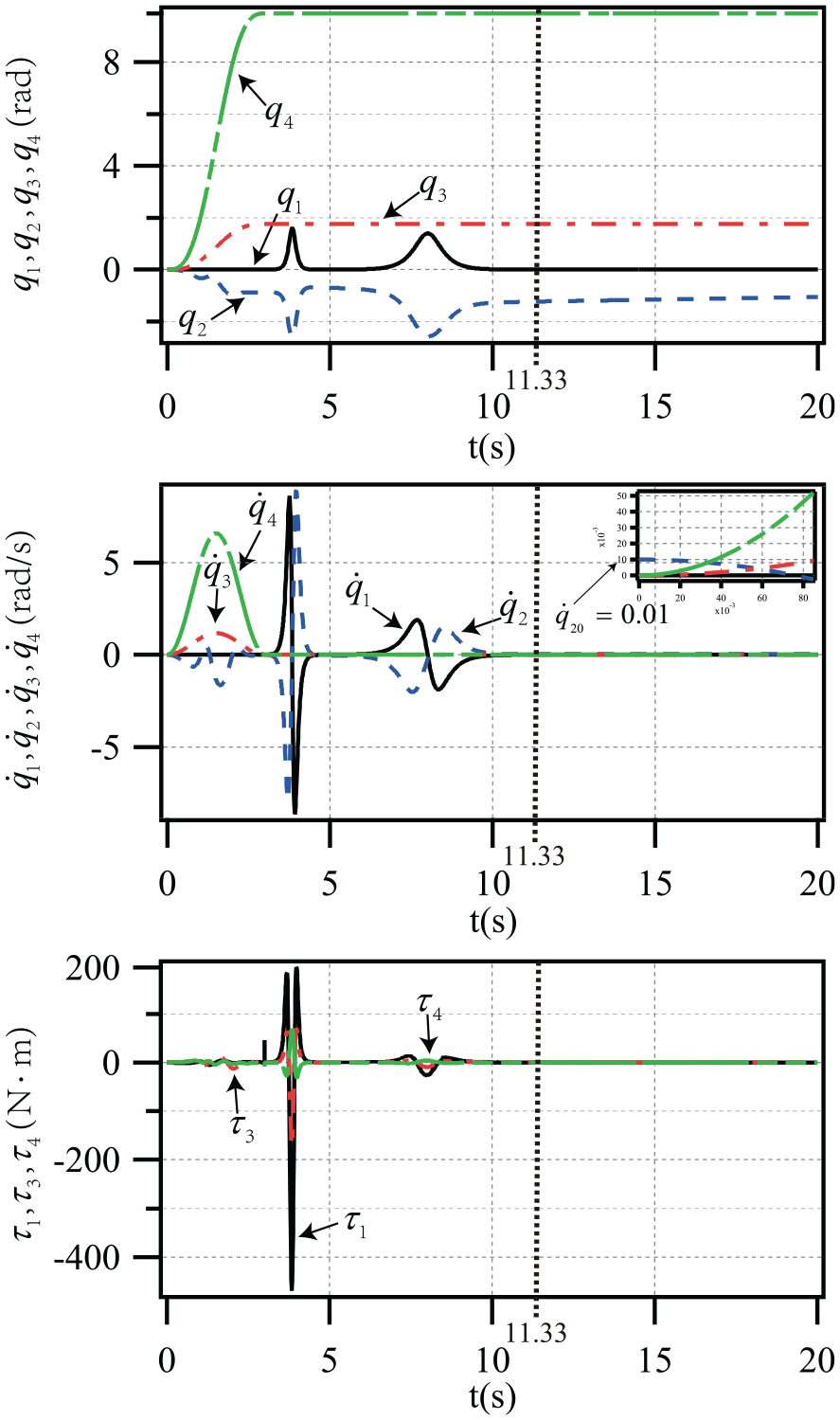
In this subsection, in order to verify the general of this control strategy, we select same initial and target angles as that in Xiong et al. 34 .
By using the DEA, the parameters of the second planned trajectory are as follows:
Figure 3 is the result of designed simulation experiment, which shows all links converge to the target value. After
Simulation I results of case B.
Situation II: non-zero beginning velocity
Case A
In this section, in order to verify our method also applies to the case that the underactuated link has non-zero initial velocity. The system parameters and states are same as. 33 Let

By using the DEA, the parameters of the second planned trajectory are as follows:
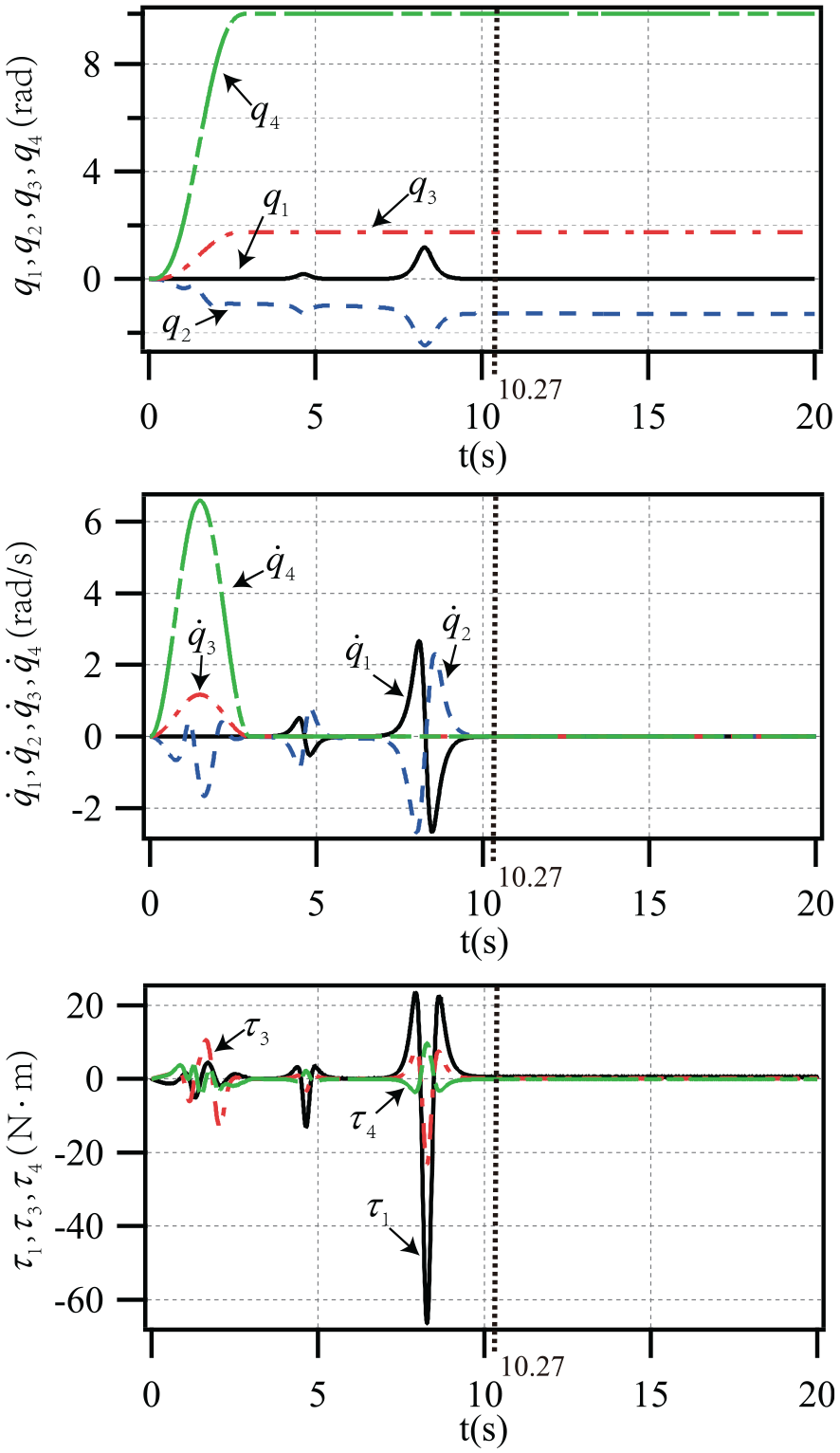
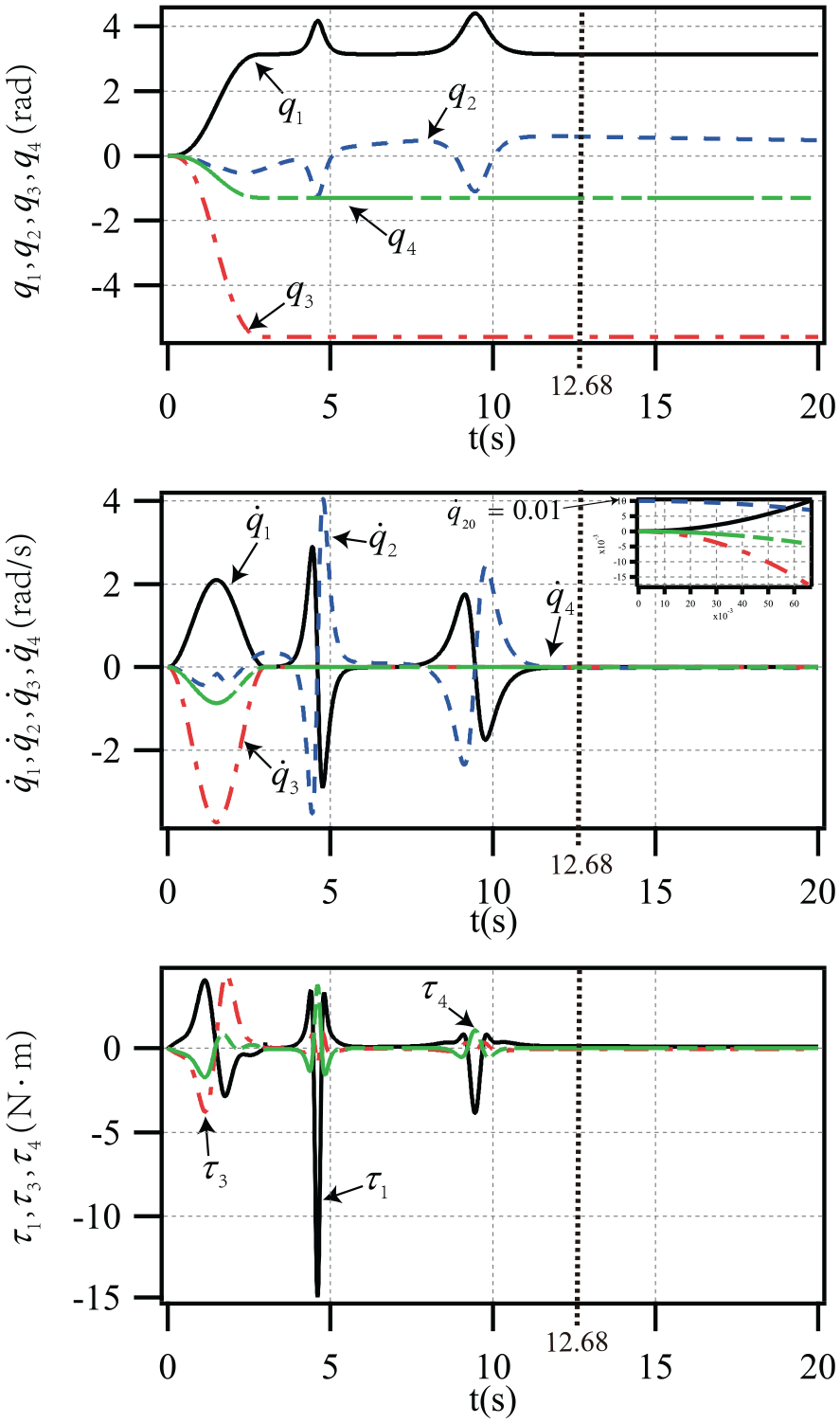
Figure 4 shows that even if the system has the non-zero beginning velocity, after
Simulation II results of case A.
Case B
In this section, to verify our strategy can be widely applied in the case when underactuated link has the non-zero beginning velocity. The system parameters and states are same as Xiong et al. 34 Let

By using the DEA, the parameters of the second planned trajectory are as follows:
Figure 5 shows that even if the system has the non-zero beginning velocity, after
Simulation II results of case B.
Conclusions
In this paper, for object planar APAA systems, we propose a attitude control method based on underactuated constraints and intelligent algorithms. The control flow is divided into two steps: (1) Control the active links reaching the desired target by following the established trajectory. (2) Keep the non-first joints in target angles, meanwhile the first active link moves according to the planned trajectory. In this way, all the joints arrive at the established position simultaneously. Finally, several groups of numerical simulation experiments prove the efficiency of proposed method.
Different from making the first link maintaining at the initial state in, 33 our control method do not reduce the work space. Comparing with Xiong et al., 34 this paper further addresses the input constraint problem via establishing the input constraint model. Unlike the existing stable control methods, this paper considers the non-zero beginning velocity. The proposed two-stage control strategy can solve such problem by using the DEA. Moreover, the control method proposed by us can be widely used in other underactuated robots.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by: (1) Science and Technology Research Project of Hubei Provincial Education Department (No. D20211506); (2) Scientific Research Foundation of Wuhan Institute of Technology (No. K2021027); (3) Hubei Key Laboratory of Intelligent Robot (Wuhan Institute of Technology)(No. HBIRL202105); (4) Graduate Innovative Fund of Wuhan Institute of Technology (NO. CX2022123).