
Abstract
In order to identify ship collision risk for the security of maritime transportation in a close-quarters situation, a novel real-time ship collision risk awareness approach is proposed by developing a novel non-linear velocity obstacle set, QSD-NLVO. More specifically, the Quaternion Ship Domain model was introduced into the non-linear velocity obstacle algorithm, and the conflict position was reasonably defined. By replacing the conflict position with ship domain, the proposed method can more reasonably assess the safety radius of the conflict in different ship encounter scenarios. The presented model enhanced the accuracy of collision risk identification by replacing the collision position in non-linear velocity obstacle algorithm with quaternion ship domain. Finally, case studies were implemented to illustrate the effectiveness of the QSD-NLVO approach. The developed model may be utilized as a guide for investigating port traffic safety as well as a tool for maritime surveillance operators to monitor port traffic collision risks and increase traffic safety.
Keywords
Introduction
Marine transport plays a crucial role in global trade and contributes to the development of the international economy. Meanwhile, with the increase in maritime traffic density and complexity, maritime accidents, especially collision accidents, occur frequently.1,2 It is therefore essential for the development of traffic conflict assessment tools to support maritime traffic monitoring and collision accident prevention.
To present, ship collision risk analysis/management research has mostly focused on three distinct topics: (a) semi-empirical risk analysis models, (b) crucial scenarios detection models, and (c) collision avoidance models. 3 Based on accident records and expert judgment, semi-empirical risk analysis assists in determining collision risk in a specific location. The common models can be classified as: Fault Tree Analysis, 4 Even Tree, 5 Bayesian Networks, 6 and the combination models.7–9 These models are beneficial for identifying areas where more stringent risk controls could be required and worthwhile for reducing collision risk in a particular maritime area. Using traffic data, research in (b) crucial scenarios detection models and (c) collision avoidance models may assist resolve issues with semi-empirical risk assessments (i.e., AIS data). The techniques used include velocity obstacle,10,11 ship domain,12,13 anti-collision action simulation models, 14 DCPA, and TCPA.15,16 Although the aforementioned techniques for assessing collision risk have advanced, there are still certain restrictions in this field. When confronted with significantly increased traffic volume or complexity, monitoring officers observe with subjectivity and at random in the majority of cases, with little knowledge of the global collision risk. Additionally, they could undergo somewhat higher cognitive strain due to complexity or high traffic density, which would reduce monitoring effectiveness and compromise maritime safety. This work created a real-time vessel pairs collision risk measuring model in a close-quarters water environment to alleviate the aforementioned issues. The non-linear velocity obstacle algorithm and quaternion ship domain were combined in the presented model. The recommended method can improve the officer’s situational awareness while identifying collision danger in real-time.
The remainder of this paper was arranged as follows. In Section “Related work,” work related to collision risk detection in encounters was illustrated. Section “The proposed model for identifying the collision risk of ship encounter” presented and discussed the suggested model’s elaborate development. In Section “Cases study and discussion,” case studies were carried out to confirm the effectiveness and feasibility of the proposed model. Additionally, some discussions about the results were also analyzed in this part. In the end, the conclusion was depicted in Section “Conclusion,” and future work on this research was also presented.
Related work
Collision risk identification is the crucial step that may decrease accidents and enhance navigational safety in collision avoidance. Given this, a large number of scholars have conducted various studies regarding the recognition of collision danger. The Closest Point of Approach (CPA) idea, which is used in marine and aviation research, is a noteworthy methodology. 17 Distance to CPA (DCPA) shows the shortest distance between two ships, while Time to CPA (TCPA) shows how much time is left until CPA. Goerlandt et al. 18 included several indicators, such as the DCPA and TCPA, to develop their CRIs.
These approaches performed well in recognizing collision risk and taking the necessary safeguards. Zhang et al.19,20 suggested a unique approach for identifying probable ship-ship near misses using AIS data. They created the Vessel Conflict Ranking Operator (VCRO) to determine the severity of a close call by taking into account the separation between the two ships, their respective speeds, and their divergent directions.
The ship safety domain is an additional concept aimed at mitigating the aforementioned threats. Ship domain is a generalization of safe distance that was developed based on the fact that safe distance is often longer or shorter in certain directions.21,22 Fujii and Tanaka 23 presented the domain for the first time as “a two-dimensional region around a ship that other ships must avoid—it might be regarded the evasive area.” The ship domain by Fuji is an ellipse with the ship in its central point with major and minor axes specified in ship length. Goodwin suggested in reference 24 a domain comprised of discontinuous circular forms partitioned into three distinct sectors encompassing the ship. Another ship domain offered by Davis et al. 25 is a circular form that is off-center (to represent an important COLREGs requirement). Furthermore, Coldwell 26 presented a similar off-centered elliptic domain. 26 Liu et al. 27 presented dynamic ship domain models for the capacity study of restricted water channels. Wang et al. 28 developed expanded analytical models of the domain, and they subsequently established the notion of dynamic Quaternion Ship Domain.29,30 Zhang and Meng 31 presented a model of the domain of probabilistic ships. Combining ship domain with CPA, this work 32 proposes a better approach for quantitatively determining the CR in ship navigation. Utilizing an affiliation function to indicate the magnitude of collision risk, fuzzy logic is also utilized to ship collision risk detection.33,34 Emerging machine learning algorithms estimate the danger of collision between boats. Park 35 suggested an improved machine learning approach for estimating ship collision risk and facilitating more reliable ship collision risk decision-making. Rawson and Brito 36 presented a thorough analysis of the academic literature in the marine realm on the subject of supervised machine learning and big data applications.
The velocity obstacle (VO) considers the target ship’s velocity as a dynamic obstacle, taking into account both static and dynamic information, and provides real-time risk visualization. 14 The non-linear velocity obstacle was employed in the maritime domain, 37 enabling the following functions: judging whether own ship is in danger and finding a suitable collision-free path. Using historical AIS data, an improved Time Discrete Non-linear Velocity Obstacle (TD-NLVO) method was presented to identify numerous ship contact scenarios. 38 Huang et al. 39 summarized the Linear-VO, Non-linear VO, and Probabilistic VO, which are applied to support collision avoidance with target ships whose trajectories are non-linear (with time-dependent velocities) and (probabilistically) predictable. Additionally, Huang et al. 40 developed a collision avoidance system and provided a GVO algorithm for ship collision avoidance (GVO-CAS). The officer on watch can use this system to help prevent collisions by seeing the changes in course and speed on one ship that leads to them.
The proposed model for identifying the collision risk of ship encounter
The non-linear velocity obstacle algorithm
In the beginning, the Non-linear Velocity Obstacle (NLVO) method was established in literature.
41
This method assumes that the TS will travel in a straight path at a constant speed, but it also assumes that the TS’s trajectory will be known in advance. The VO algorithm’s primary goal is to pinpoint the velocity that causes a collision. The VO set is collection of velocity-leading collision. The collision-free solution is the velocity out of VO set.
25
The majority of collision risk measurements typically choose two ships in the current flow of traffic to assess the danger. Similar to the previous research, this one built the VO algorithm using two-ship situations. In this part, the VO algorithm’s basic idea and its variants are described using the ship-ship encountering situation seen in Figure 1. Ship
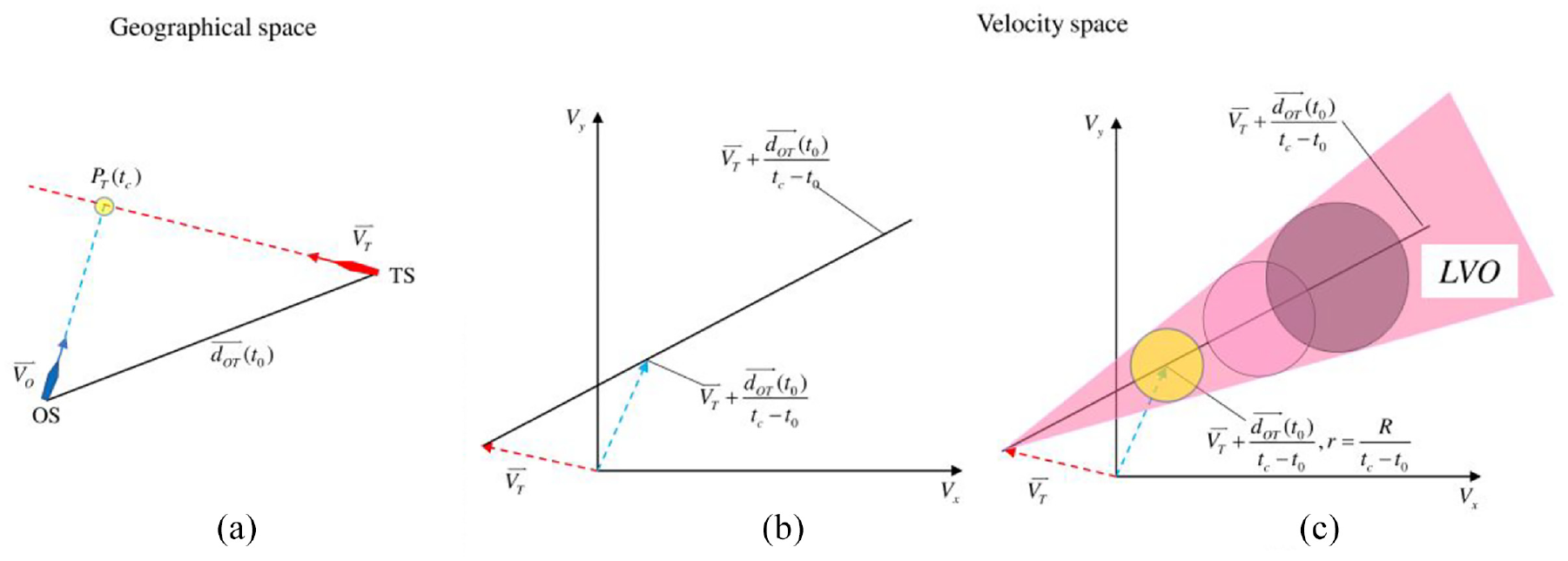
Demonstration of linear velocity obstacle: (a) geographical display of encounter situation, (b) LVO set without considering ship dimension, and (c) LVO considering ship dimension.
The velocity obstacle is a set of OS’s velocities which is induced TS, noted as

where ‖.‖ is the Euclidean distance. A collision is likely if the distance between two ships is less than the threshold. As a result, equation (2) can be used to express the need for a collision occurring at time slice

Where ⊕ is Minkowski addition which means the elements in
Based on ship kinematics, we can expand the

According to the equation (3), we have

If

The linear

Where
Unlike the

Hence, the

Where
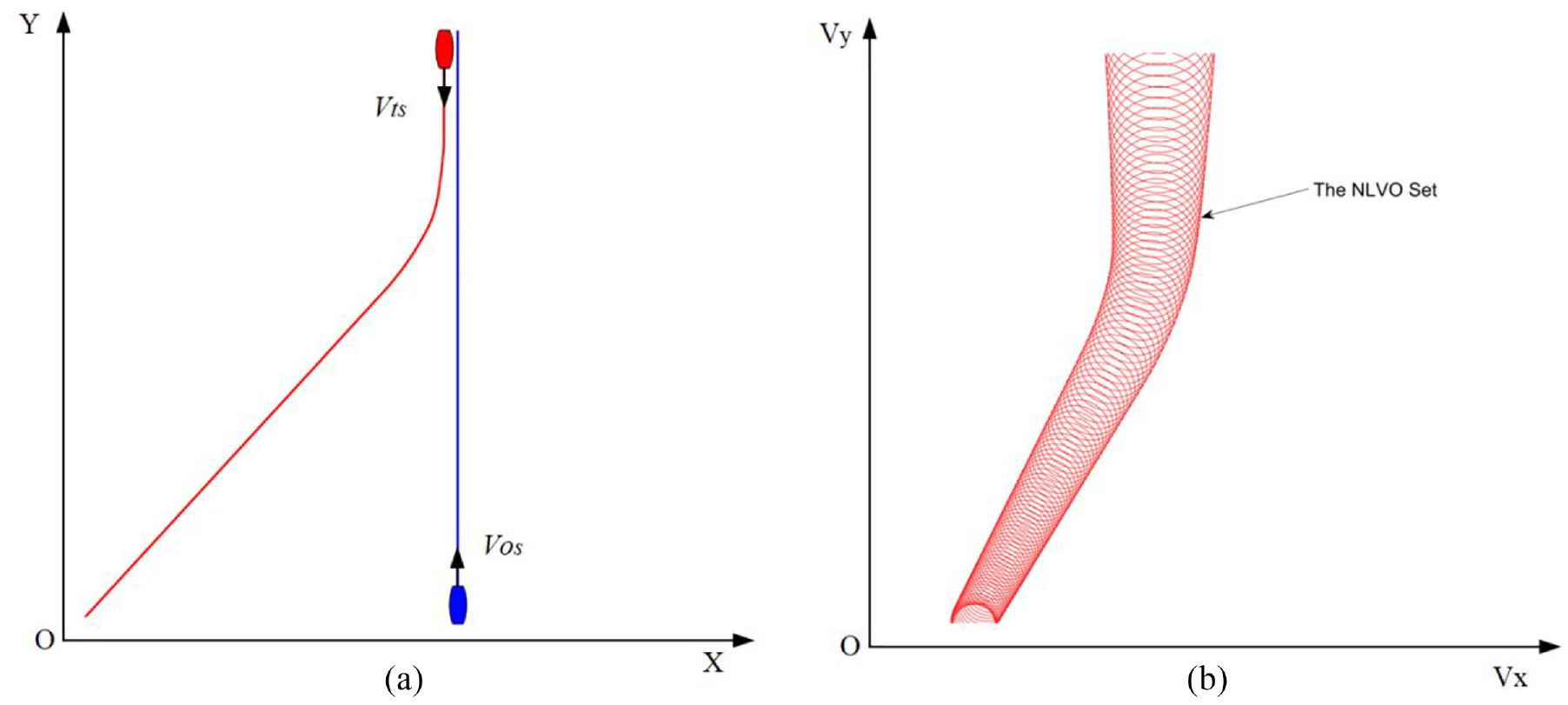
Demonstration of non-linear velocity obstacle: (a) OS and TS in geographic space and (b) the NLVO set in velocity space.
In equation (7),
The QSD-NLVO model for identifying the ship-ship collision risk
Since ships are represented by a circle with a diameter of their lengths in
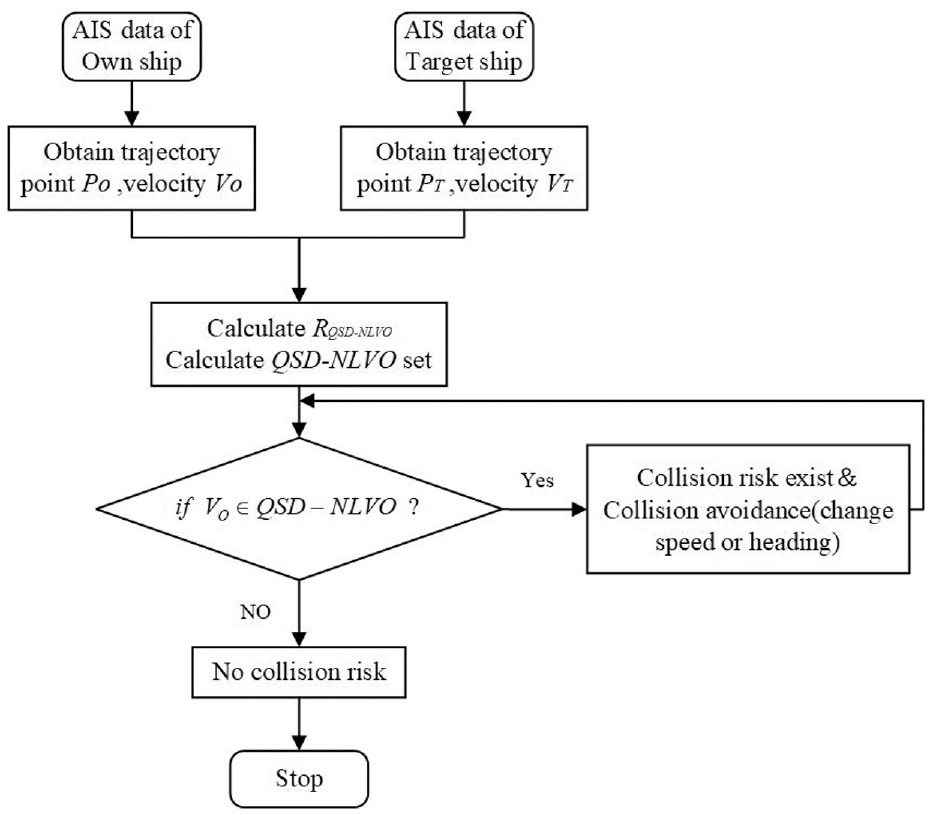
Flow chart of the proposed collision risk detection model.
The model of the Quaternion Ship Domain was first put forward by Zhang et al. 16 The domain size is defined by the quaternion, which includes four radii, that is, front, aft, port, and starboard, which adequately account for variables affecting the domain (i.e., ship maneuverability, speeds, direction, etc.). The QSD is a region delineated by a closed curve connecting these four parts to the inner zone, as detailed below:

where
And the boundary functions
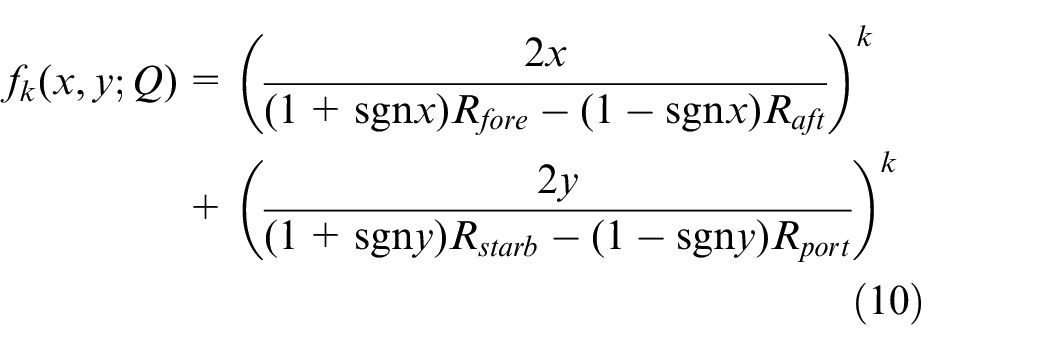
The power
Inspired by the QSD model, the new dimension of the

Where

Consequently, equation (8) can be rewritten into equation (14):
Where
By using the aforementioned configuration of
Cases study and discussion
In this section, to demonstrate the performance of the presented QSD-NLVO model, three classical encounter scenarios under COLREGs were employed for simulation, that is, head-on scenario, crossing scenario, and overtaking scenario. We assume that throughout the encounter, the own ship travels continually in a straight line, and the target ship replies by avoiding the own ship. This approach recognizes possible collision dangers during ship interactions rather than collision avoidance. The configuration of the case study is shown in Table 1.
Configuration of three scenarios.
Scenario 1: Head-on situation
Two ships are involved in the head-on scenario: the own-ship (OS) and target-ship (TS). The space-fixed coordinate system, seen in Figure 2(a), is denoted by the letters

Layout of scenario 1.
The initial position of OS is
Moreover, the safety distance between two ships is set as
At this time, the ship operator should take immediate measures to mitigate the possibility of collision. We assume that the velocity of TS in each time slice is known in advance. The TS shares her velocity over time with OS. Thereby, the trajectory of TS can be obtained. As can be seen from the Figure 5, when
Relative distance between OS and TS in scenario 1.
By the conventional NLVO method, the collision risk can be detected and mapped in OS’s velocity space. In Figure 6(a), the initial velocity of OS (the blue asterisk) is not inside the VO set, which indicates the OS will not collide with TS. Nevertheless, according to the above mentioned, collision risk has occurred. On the contrary, collision risk had been identified by the QSD-NLVO approach. As observed in Figure 6(b), the blue mark indicating the velocity of the own vessel is inside the red speed barrier region. This implies that there is a possibility of collision between the two boats, and precautions should be made to prevent collision in an emergency. Results indicate that the suggested approach could successfully detect collision risks and offer shipping operators with early warning. This method allowed us to find a solution for ship navigators. Collisions can be avoided by changing the velocity so that the velocity vector is outside the set of velocity obstacle.
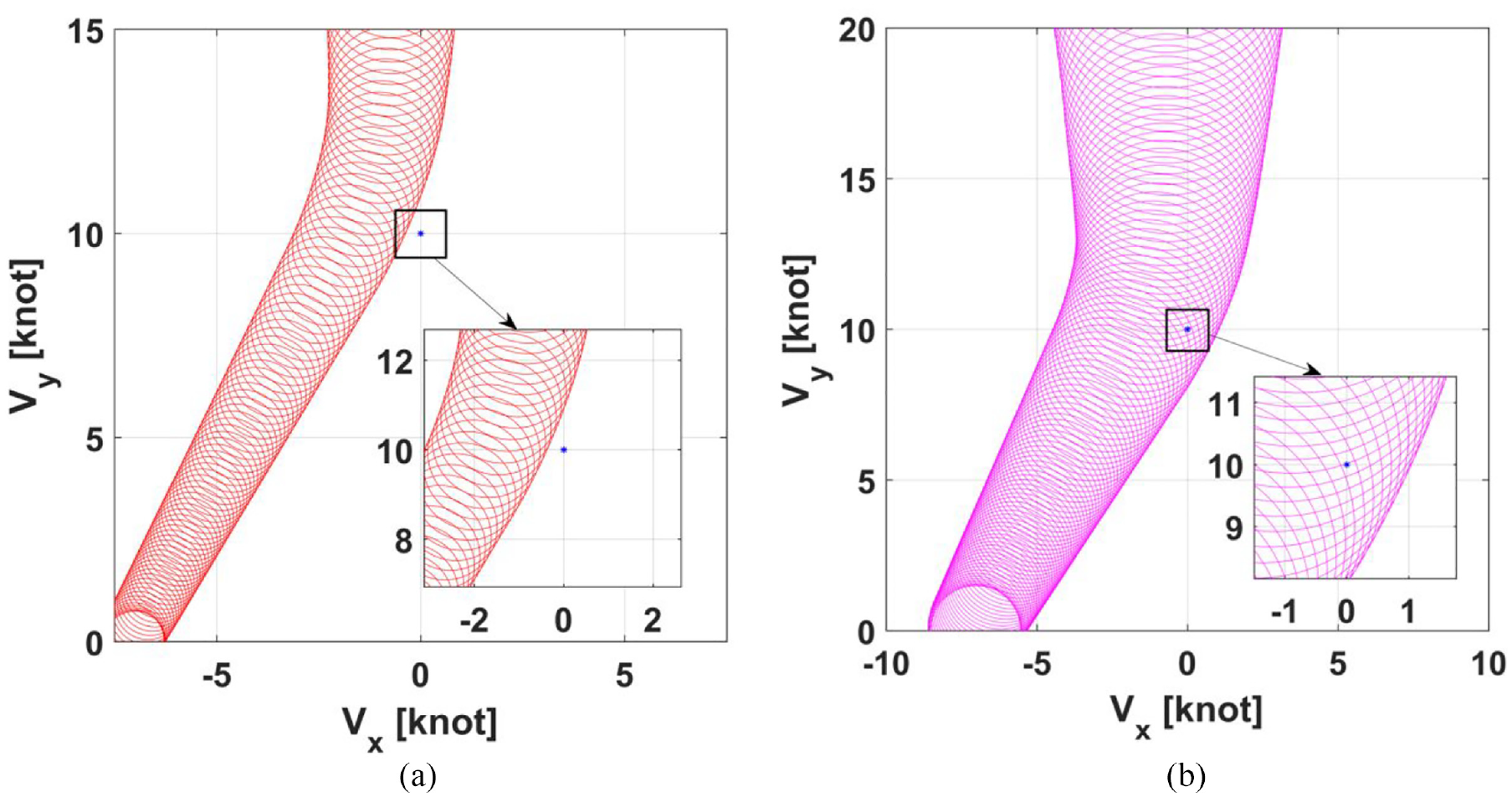
NLVO set and QSD-NLVO set in OS’s velocity space in scenario 1: (a) the NLVO algorithm and (b) the QSD-NLVO algorithm.
Scenario 2: Crossing situation
Scenario 2 was created to evaluate collision risk during crossing encounters. The layout of the scenario is shown in Figure 7. According to Table 1, the initial speed of the own ship and target ship is 14.1 and 10 kN, respectively. The initial heading angle of the own ship and target ship are 315° and 0°. The initial relative distance between two ships is 1.6 nmi, decreasing as the two ships sail. Figure 8 shows the trend of the relative distances of two ships during the crossing situation. And the minimum relative distance is 0.19 nautical miles at time
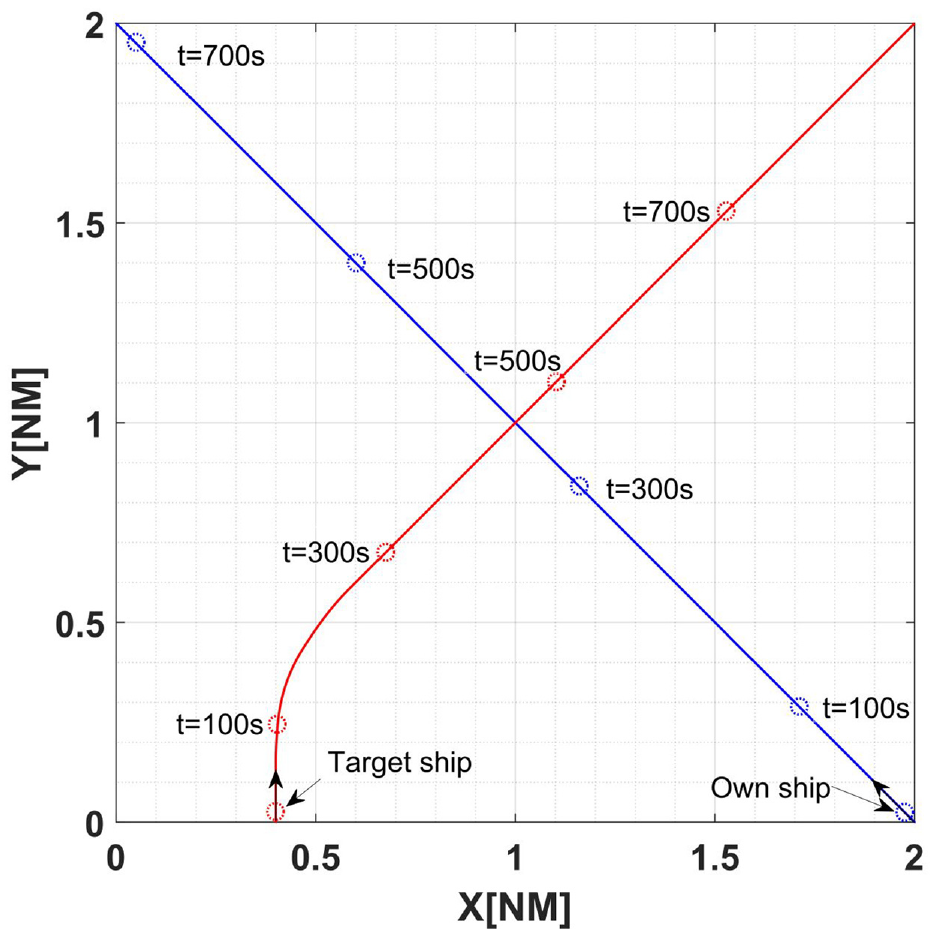
Layout of scenario 2.
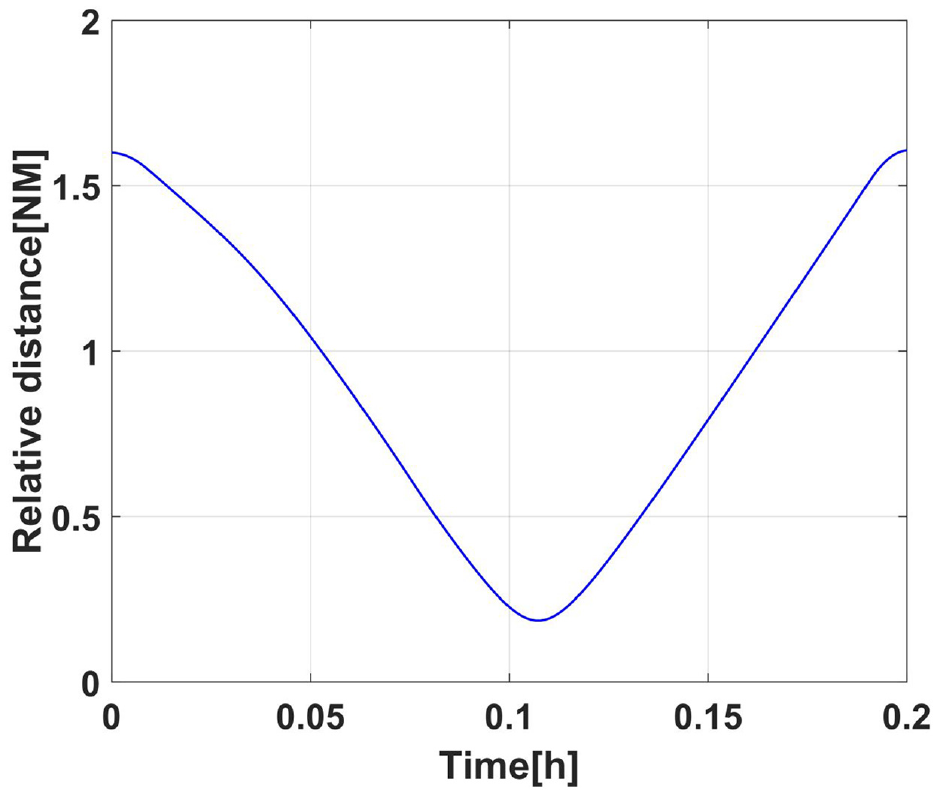
Relative distance between OS and TS in scenario 2.
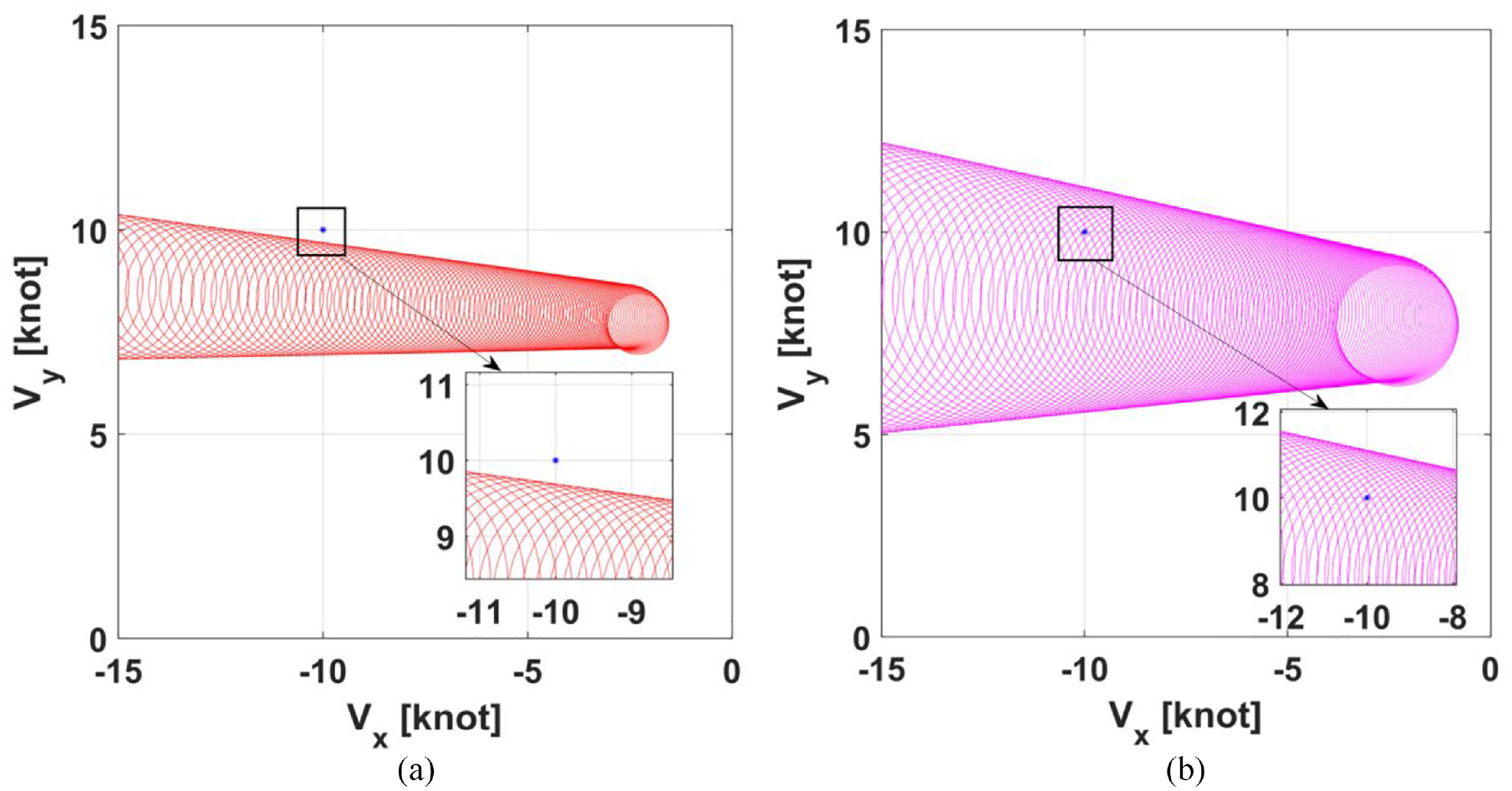
NLVO set and QSD-NLVO set in OS’s velocity space in scenario 2: (a) the NLVO algorithm and (b) the QSD-NLVO algorithm.
Scenario 3: Overtaking situation
In the initial status, the initial velocity of the own ship is 13.4 kN, while the initial velocity of the target ship is 9.2 kN. The initial heading angle of the own ship and target ship are 45° and 0°, respectively. As seen in Figures 10 and 11, the initial relative distance is about 0.61 nmi. And the minimum relative distance is 0.28 nmi at time
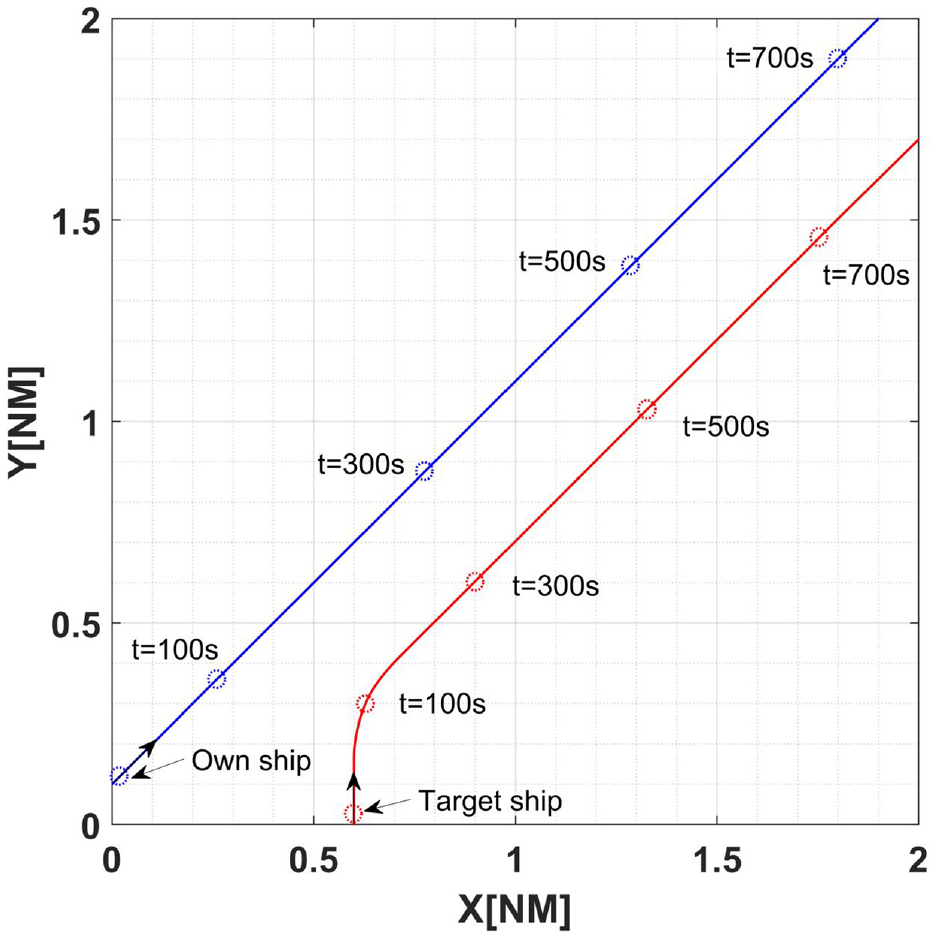
Layout of scenario 3.
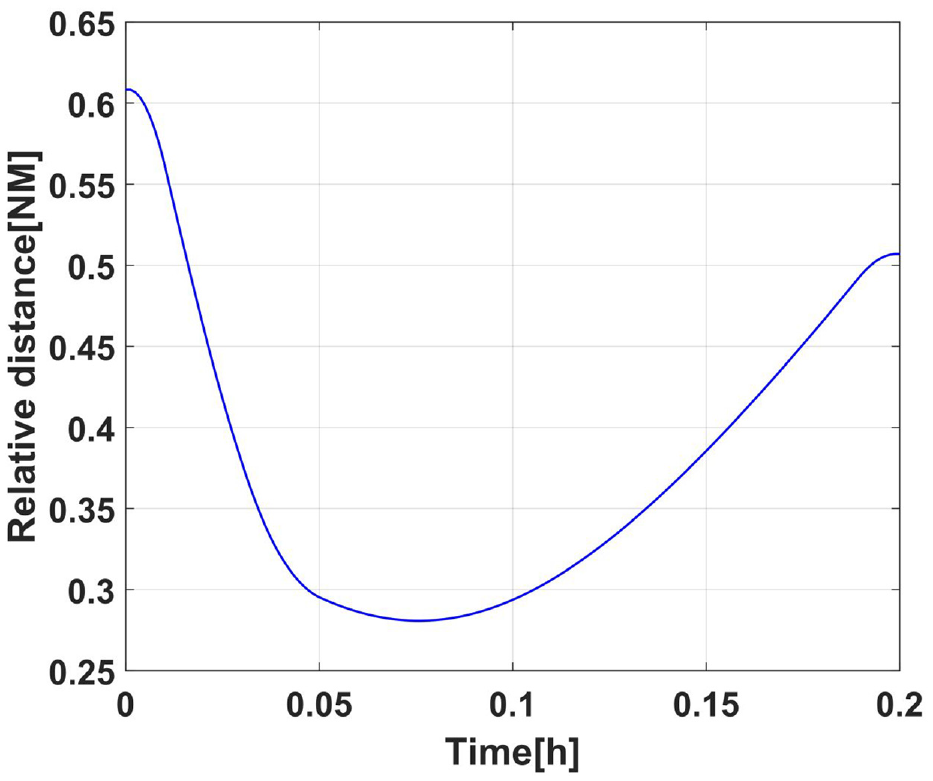
Relative distance between OS and TS in scenario 3.
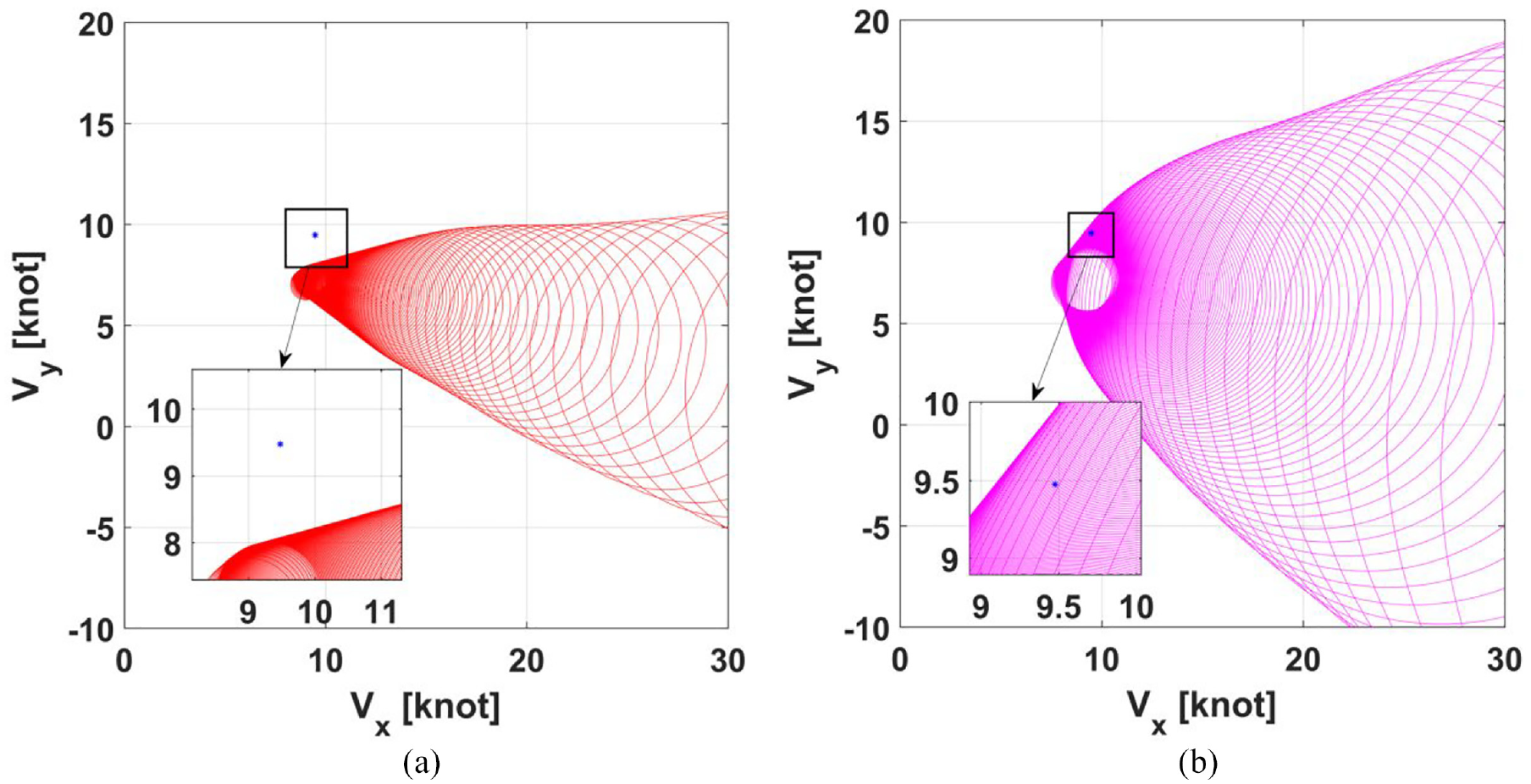
NLVO set and QSD-NLVO set in OS’s velocity space in scenario 3: (a) the NLVO algorithm and (b) the QSD-NLVO algorithm.
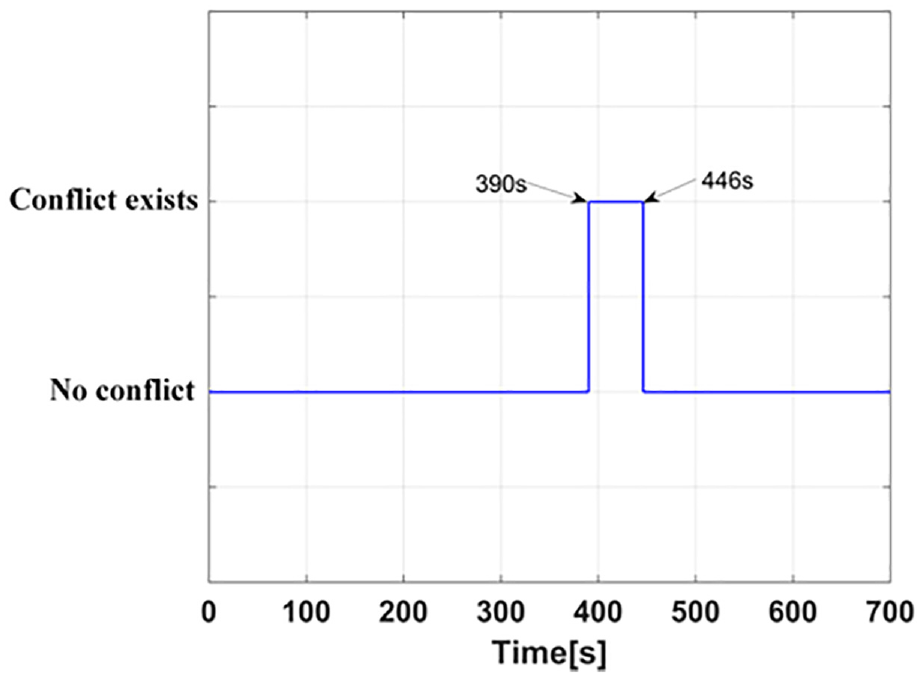
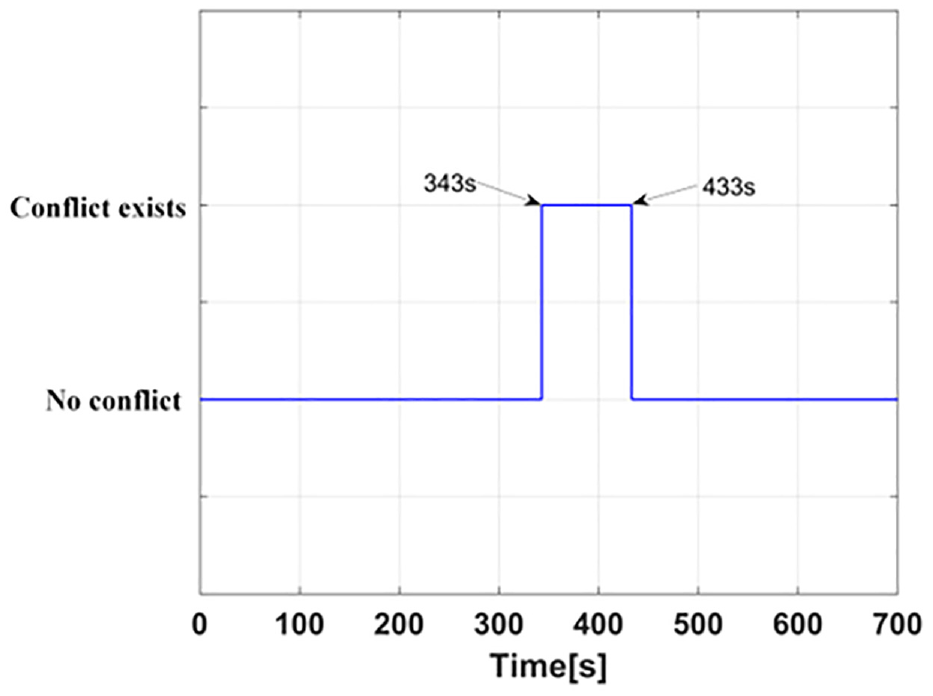
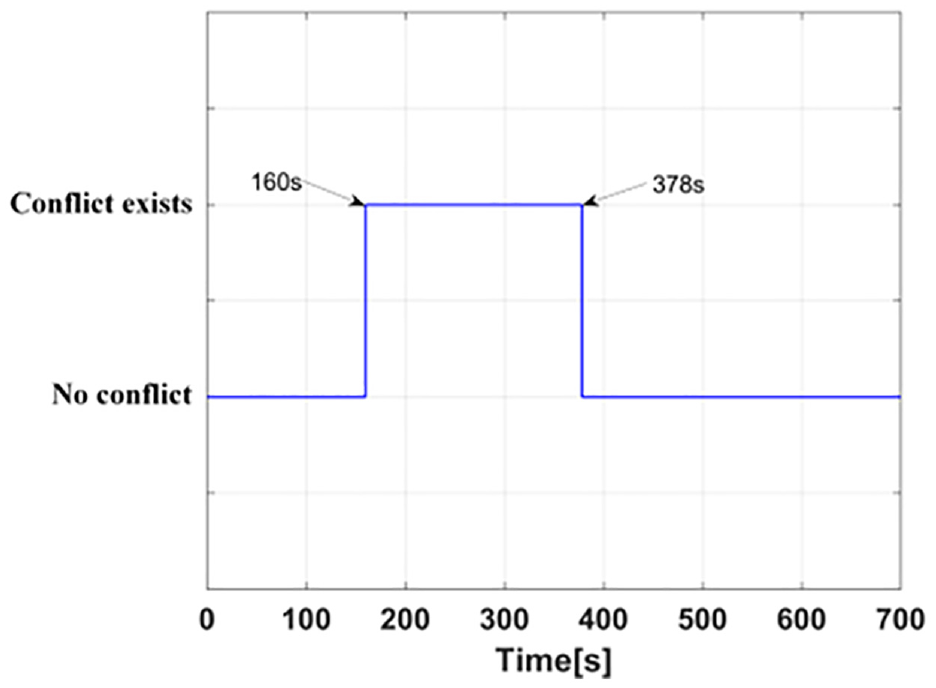
In general, ship collision risk does not just happen at one moment but lasts for a while. The established QSD-NLVO model can detect the collision risk in real time to avoid collision conflict. Figures 13 to 15 show the duration of collision risk for ships in the above encounter scenarios, respectively. The presence of the collision conflict indicates that there is collision risk. More specifically, the three encounter scenarios above had a collision risk lasting 76, 90, and 218 s, respectively.
Periods of conflict exist in scenario 1.
Periods of conflict exist in scenario 2.
Periods of conflict exist in scenario 3.
For each scenario, four moments were selected to test the proposed QSD-NLVO algorithm. The selection of moments follows this principle: the first moment is selected before the start of the collision conflict; the second and third moments are selected during the collision conflict, and the fourth moment is selected after the end of the collision conflict. Figures 16 to 18 shows the identification result at the selected four moments. When
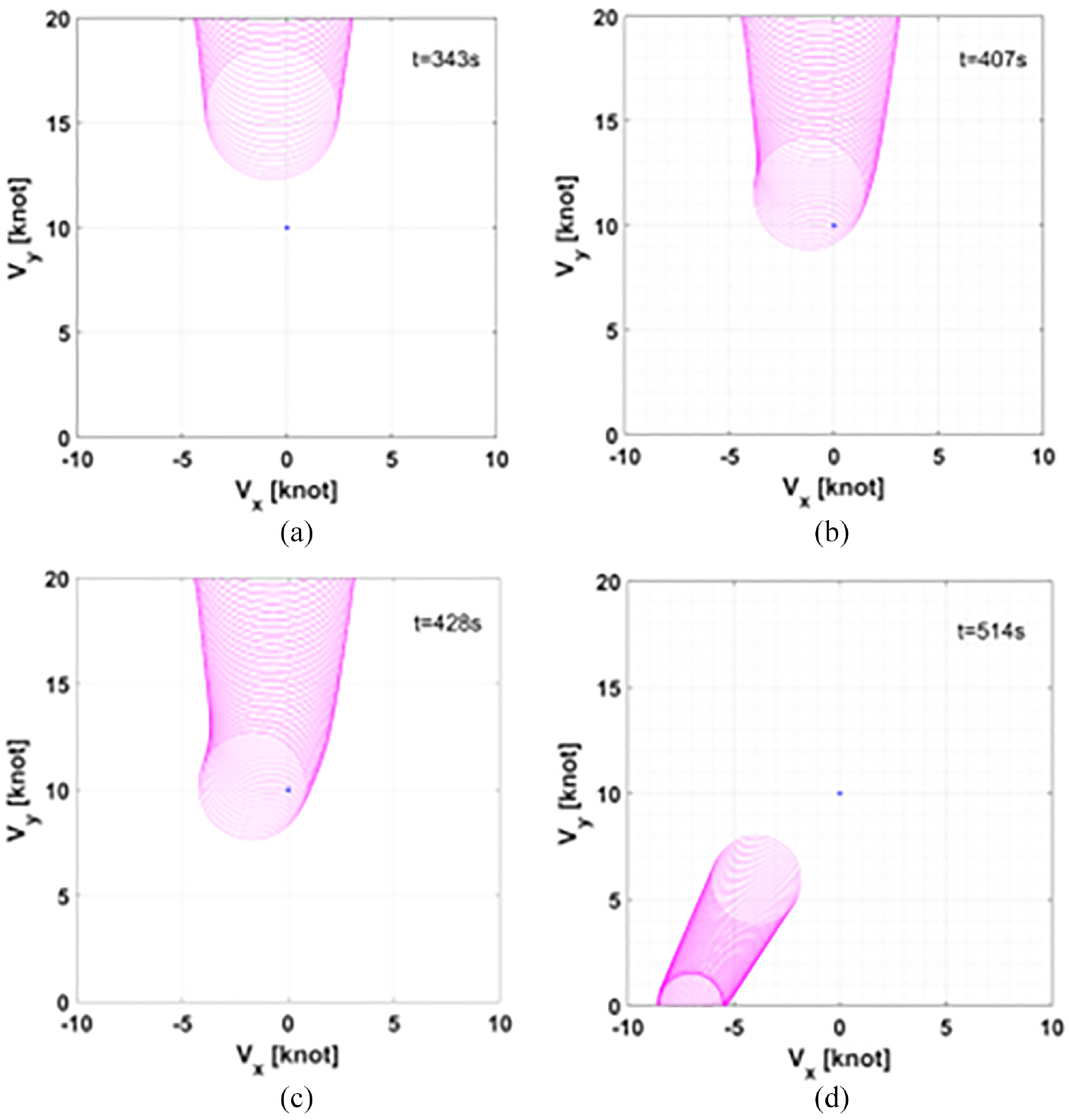
QSD-NLVO set in OS’s velocity space at four selected moments in Scenario 1: (a) t = 343 s, (b) t = 407 s, (c) t = 428 s, and (d) t = 514 s.
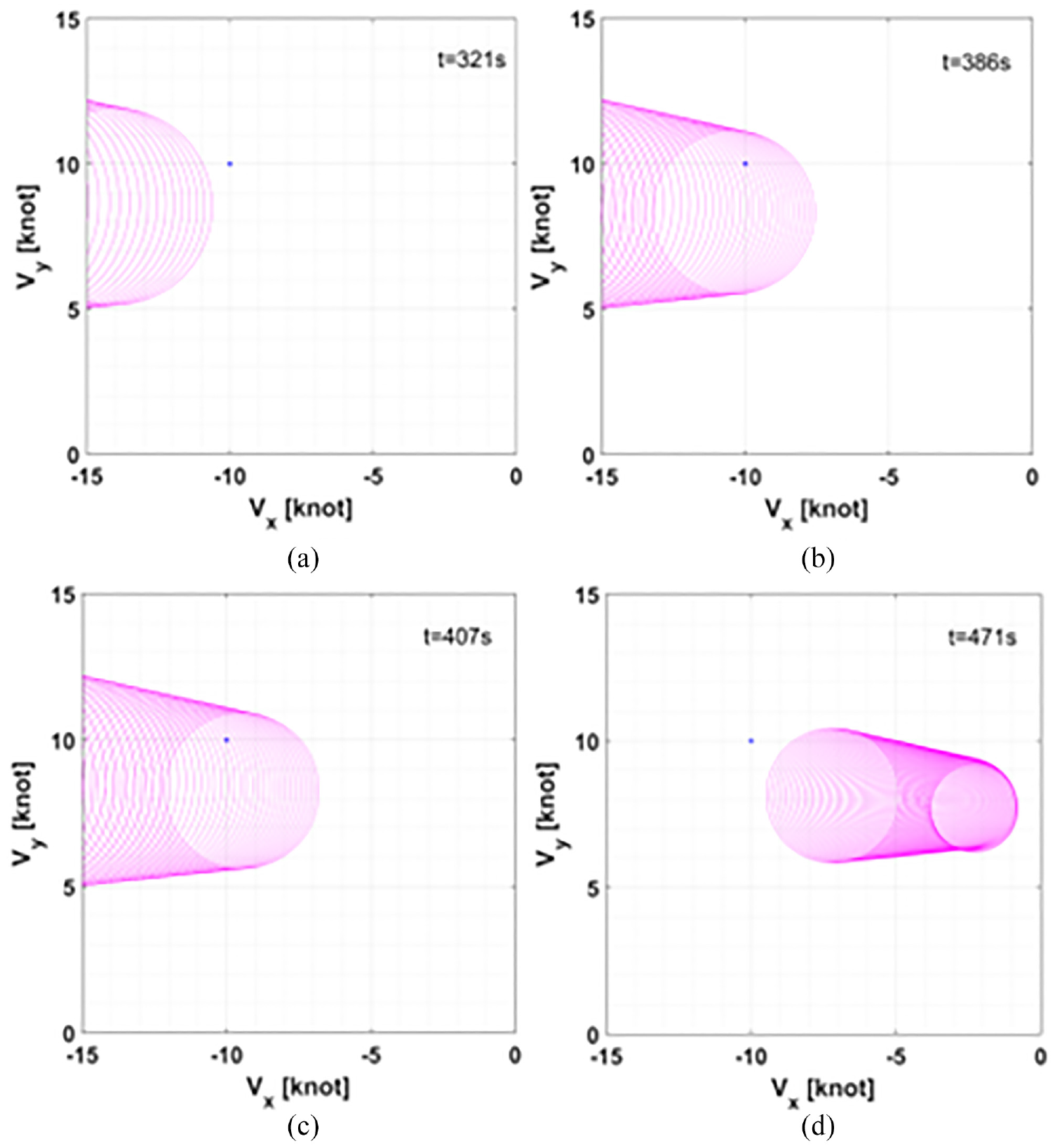
QSD-NLVO set in OS’s velocity space at four selected moments in Scenario 2: (a) t = 321 s, (b) t = 386 s, (c) t = 407 s, and (d) t = 471 s.
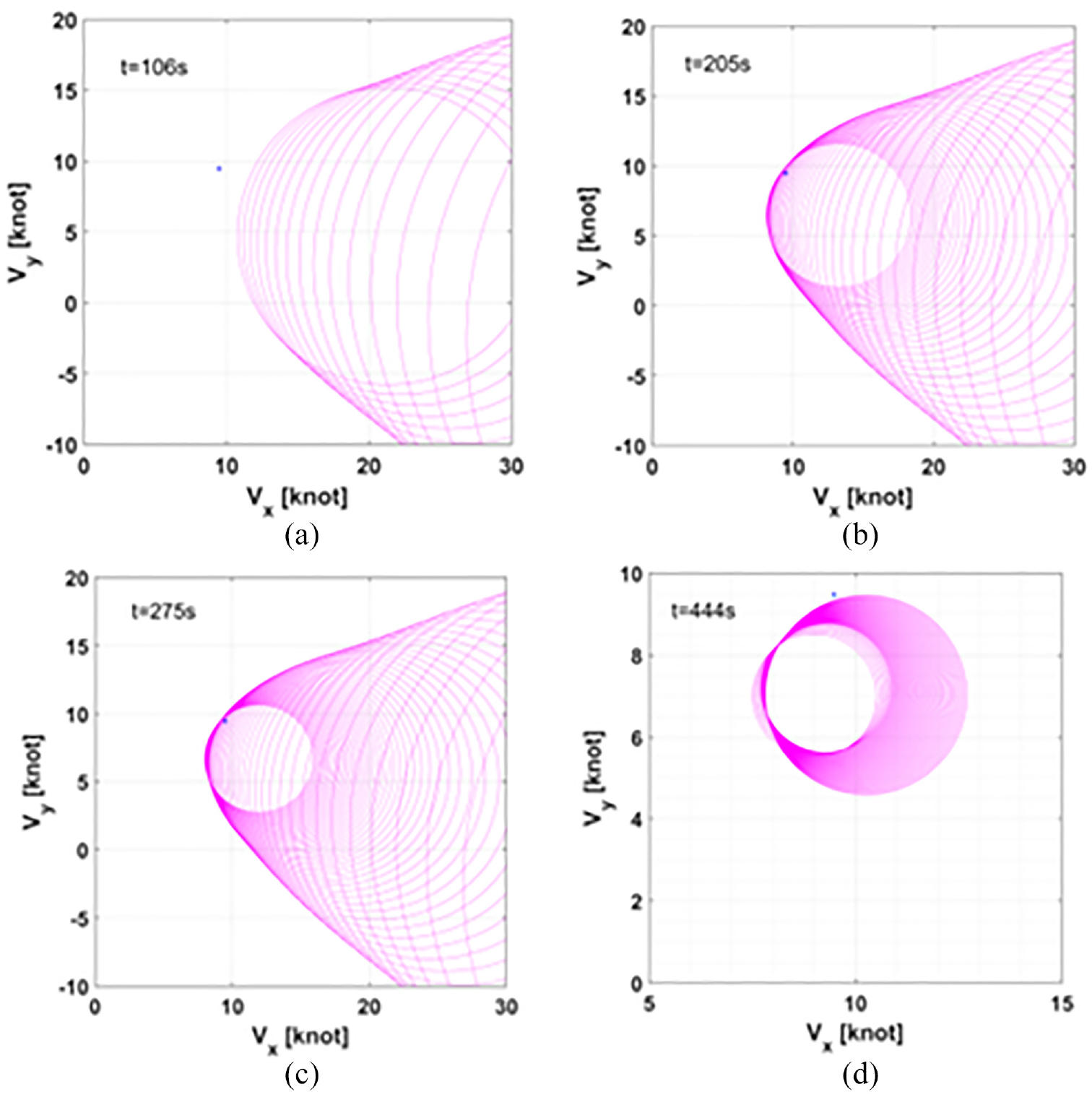
QSD-NLVO set in OS’s velocity space at four selected moments in Scenario 3: (a) t = 106 s, (b) t = 205 s, (c) t = 275 s, and (d) t = 444 s.
Conclusion
In this work, a real-time collision risk detection model was proposed with the goal of precisely and effectively identifying the collision risk of ship encounters. The Quaternion Ship Domain model was introduced into the non-linear velocity obstacle algorithm, and the conflict position was reasonably defined. Several case-specific experiments were conducted to verify the efficacy of the proposed model. The trials’ findings showed that the recommended model may successfully capture the overall collision risk when vessel pairs come into contact. This might help surveillance operators monitor the collision risk and increase maritime safety. Importantly, the model enables surveillance personnel to identify boats or vessel pairs with a relatively high collision risk and get a better comprehension of the overall danger of a collision between two vessels. Likewise, it will lessen their obligations while dealing with issues brought on by complexity or rather high traffic density.
Nevertheless, the proposed model still has a number of drawbacks that need be investigated further. For instance, the established model is relatively limited under the situation that there are few ships in the water area. And this paper focused on the risk identification of two ships in encounters without considering the multi-ship situation. Therefore, for future studies, the model should consider the multi-vessel encountering considering the AIS data.
Footnotes
Appendix
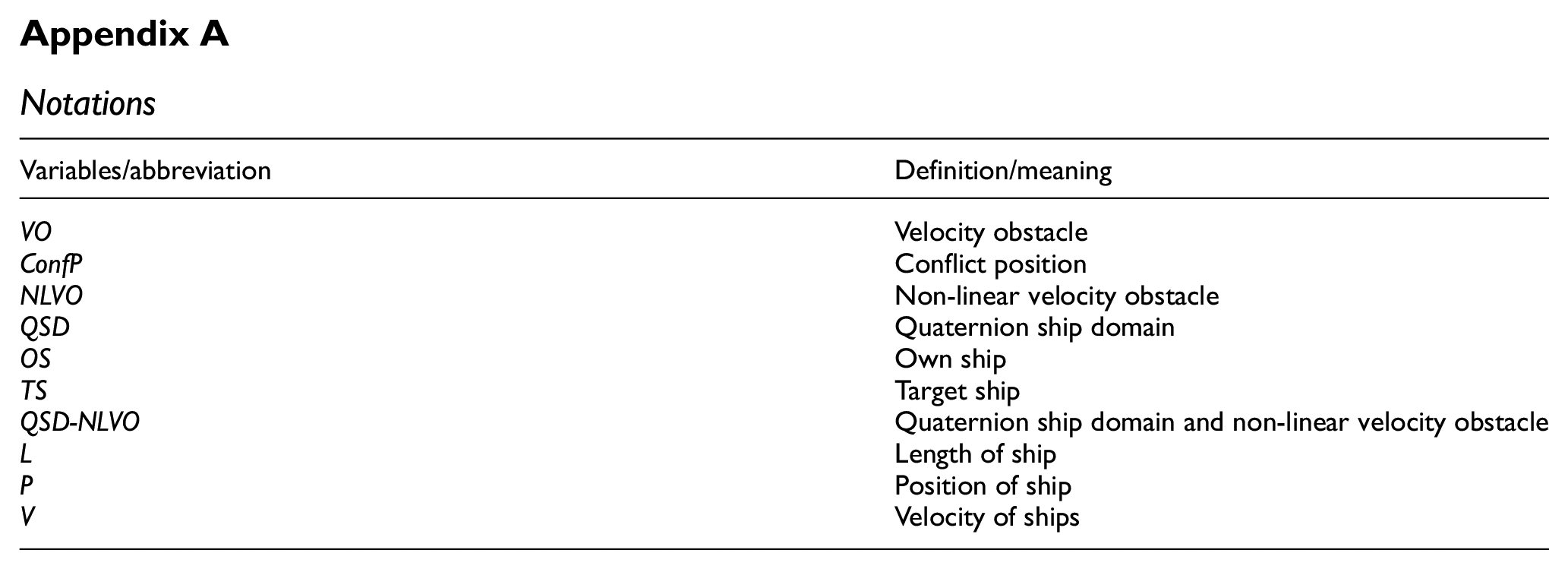
Notations
| Variables/abbreviation | Definition/meaning |
|---|---|
| VO | Velocity obstacle |
| ConfP | Conflict position |
| NLVO | Non-linear velocity obstacle |
| QSD | Quaternion ship domain |
| OS | Own ship |
| TS | Target ship |
| QSD-NLVO | Quaternion ship domain and non-linear velocity obstacle |
| L | Length of ship |
| P | Position of ship |
| V | Velocity of ships |
Author contributions
Conceptualization, BS; methodology, ZL; software, BS; validation, BS; formal analysis, BS; resources, BS; writing—original draft preparation, BS; writing—review and editing, JZ; supervision, ZL; project administration, JZ; funding acquisition, JZ. All authors have read and agreed to the published version of the manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was funded by the Natural Science Foundation of Hubei Province under Grant No. 2018CFC865.
Data availability statement
The data used to support the findings of this study are available from the corresponding author upon reasonable request.