
Abstract
This paper studies robust stabilization problem and state feedback controller design problem for a class of complex production process systems by pattern class variable instead of state variable or output variable. Firstly, the maximum entropy clustering method is introduced and modeling method based on multi-dimensional moving pattern is given. Nonlinear state space models of systems with input-delay are established by using the trajectories of pattern class variable. Then sufficient conditions for robust stabilization of the system are obtained by Linear Matrix Inequality. In addition, a state feedback controller is designed based on this condition. Finally, the effectiveness of the methods is illustrated by taking the actual working conditions data as an example.
Keywords
Introduction
For a class of production process system with high energy consumption and complex process, modeling and control methods based on moving pattern were proposed.1–5 That is, the data space formed by the actual multi-dimensional production working condition data was collected in a long enough time is taken as a working condition moving subspace, pattern classes were obtained through clustering method,6–11 and pattern class variable was defined to describe the moving of pattern. The “pattern moving space”1–3 was constructed by using new variables. In this space, the system dynamics characteristic description and control method based on moving pattern was established. Due to patterns (or pattern classes) did not have the operation property, pattern class variables were measured by several methods such as interval number,1–3 pattern class center 4 and cell. 5 A pattern moving trajectory mapping was completed from “pattern moving space” to Euclidean space. Lyapunov stability theory was used to study the asymptotic stability of control systems, and the relationship between system output classification, system matrix and system asymptotic stability was established.12,13
In engineering and physics, the dynamic stability of systems is a widely concerned topic, and various approaches are used from several perspectives.14,15 In stochastic dynamics, when the probability density function Fokker-Planck equation is used as the auxiliary condition system for extreme value search, 16 the process based on entropy maximum is very important. Dynamic stability is widely used in many fields such as multi-body system, large deformation system and flow stability. This paper mainly adopts Lyapunov stability. This applies to nonlinear systems and can be used to study the most general theorems and study special systems.
The existing modeling and control based on moving pattern is mainly to study the modeling and control of one-dimensional moving pattern after the actual multi-dimensional production working condition pattern is compressed into one dimension by principal component analysis (PCA). However, the actual working condition patterns are generally multi-dimensional. In this paper the model based on multi-dimensional moving pattern is studied by using the pattern class centers to measure the multi-dimensional pattern class variables.
Although a lot of research achievements have been made about modeling and control methods based moving pattern, the time delay problems of these systems are rarely discussed. And in many practical systems exist time delay phenomenon, such as circuit, biological, neural network, 17 multi-agent system, 18 and so on. Because of the time delay, the state of system cannot respond to the change of the control signal in time, but produces a response after a period of time. In the design of system controller, the control performance may decline, and even the closed-loop system may be unstable if the influence of time-delay on the system is not properly considered. Therefore, it is vital to analyze the stability of systems with time delay.19–23 In this paper, the nonlinear state space model is established by the measure values of multi-dimensional pattern class variables. The robust stabilization of nonlinear system with input-delay is deduced and state feedback controller is designed by robust stable condition.
The main contribution of this paper is give a new modeling and controlling method based on multi-dimensional moving pattern and sufficient conditions for robust stabilization of nonlinear systems with input-delay is given. The robust stability of the system is proved under the designed state feedback controller. The maximum entropy clustering method is used to divide pattern class.
This paper is organized as follows: In Section 2, the maximum entropy clustering method and modeling method based on multi-dimensional moving pattern is introduced, and a nonlinear state space model with input-delay is constructed. In Section 3, the robust stabilization problem is studied. A state feedback controller is designed and the sufficient conditions for stability of the system are proved. In Section 4, the proposed stability discrimination method is verified by simulation experiment with actual sintering data. Finally, the conclusion of this paper is given.
Modeling based on moving pattern
In this section, a complex dynamic model description method based on pattern recognition is given. The main idea is to describe patterns over time by introducing “pattern class variables.” Taking the sintering production process as an example, the temperature and pressure of the last three bellows are selected as the feature variables. The maximum entropy clustering method is adopted to obtain the pattern class and the class center is taken as the measurement value. All these classes are taken as the scale to construct multi-dimensional “pattern moving space.” In this space, the system dynamics based on multi-dimensional moving pattern and the nonlinear state space model of the control system is given.
Maximum entropy clustering method
For some clustering algorithms, such as k-means8,9 and ISODATA,10,11 their class centers and number of classes are difficult to determine. The maximum entropy clustering method 24 is used to settle these problems. For this method, potential function method 25 is used to determine the initial class centers. It takes entropy as the index to evaluate the clustering results and lets the change of entropy rate to decide whether the clustering process is over. The procedure of maximum entropy clustering method is as follows:

where

where

The optimal class center is the individual with maximum entropy from all individuals.

With the above clustering method, pattern classes were used as spatial scales to construct multi-dimensional “pattern moving space.”
The idea of modeling based on multi-dimensional moving pattern
The system dynamics can be described by moving law of working condition pattern (shown in Figure 1). At each sampling time point


where
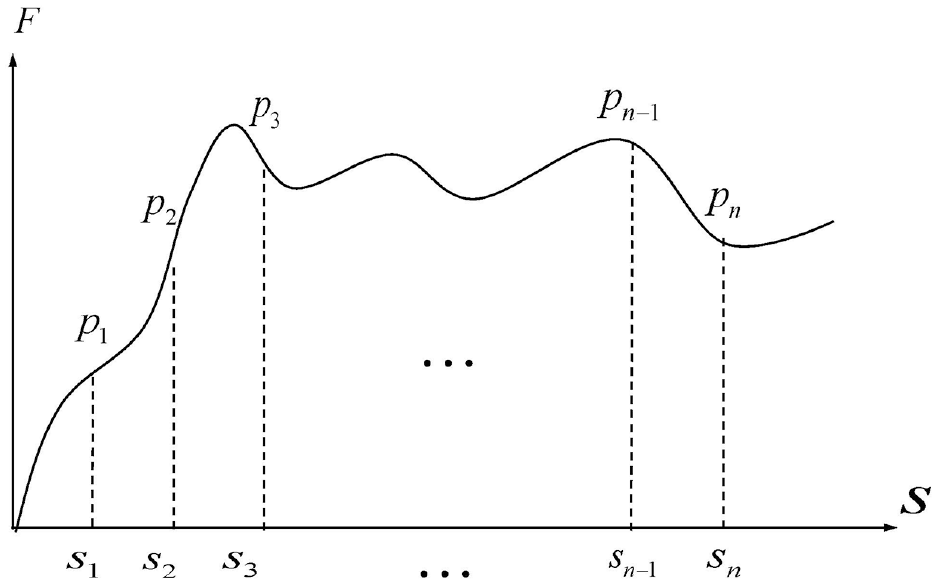
Pattern moving diagram.
For the complicate process system, pattern classes are obtained by maximums entropy clustering method. These pattern classes are used as spatial scales to construct multi-dimensional “Pattern moving space.” The variable that describes the change of the class with time
In this paper, multi-dimensional moving pattern based modeling method is studied. And the two-dimensional case is used as an example to illustrate the modeling process of multi-dimensional moving pattern. Thus, in two-dimensional “pattern moving space,” the variable
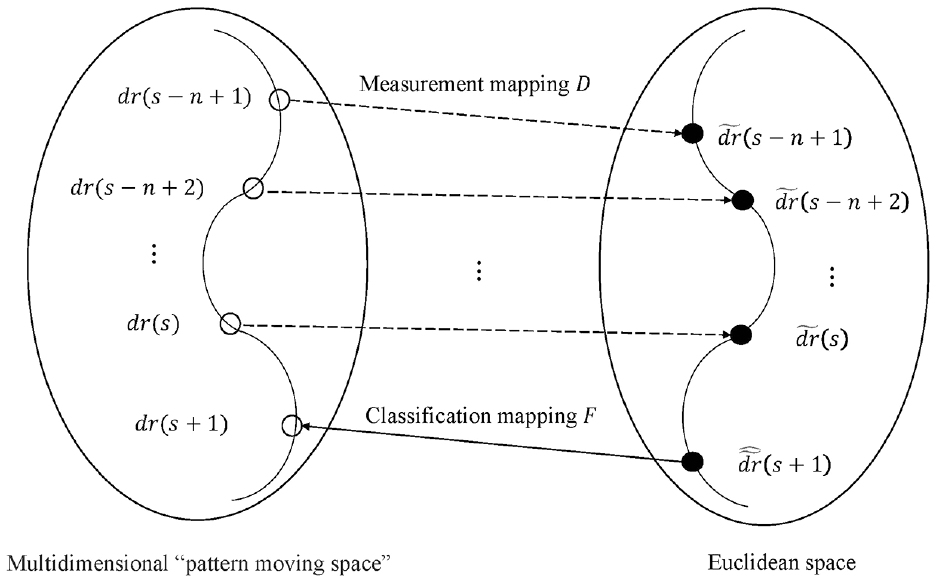
System dynamics description based on multi-dimensional moving pattern.
The prediction model based on moving pattern described by two-dimensional pattern class variables can be expressed as follows
where

their values represent two-dimensional pattern class centers.

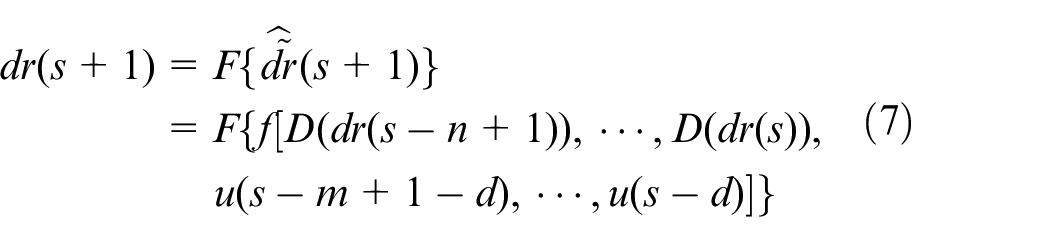
According to formula (7), it can be concluded that the process of dynamics description is composed of three parts:

where


where
where


where
Construction of nonlinear state space model of system
By (8)−(11), the system model with input time-delay can be established in Euclidean space as

According to the formula (12), (13) can obtained as follow

where

where
In order to deduce the nonlinear state space model, let
According to (15), (16) can be obtained
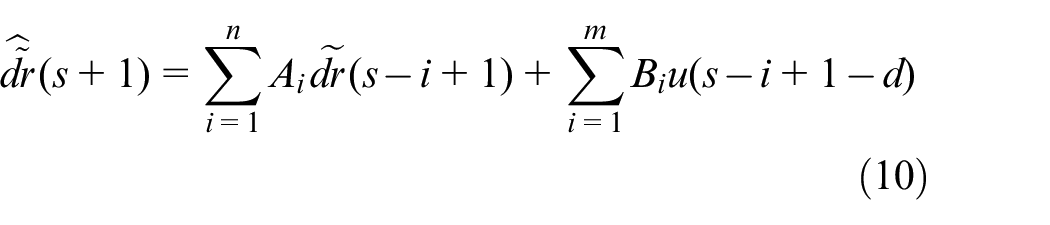
Thus, formula (10) can be expressed as
Without loss of generality, let the coefficients of

that is,
where

Therefore,
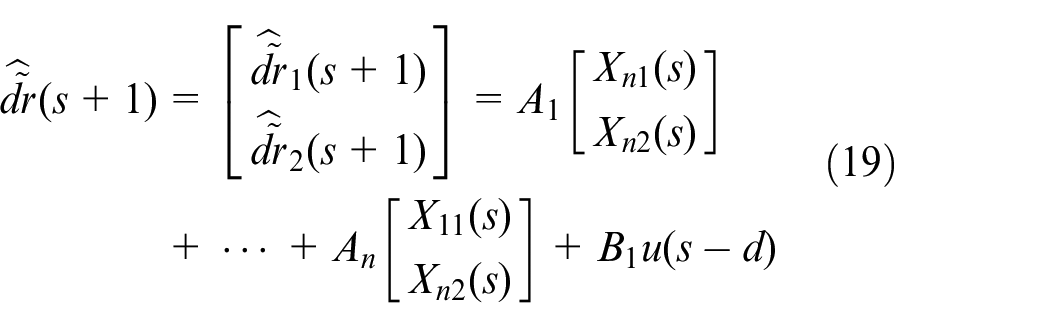
According to (13), (16), and (19), we can obtained that

where
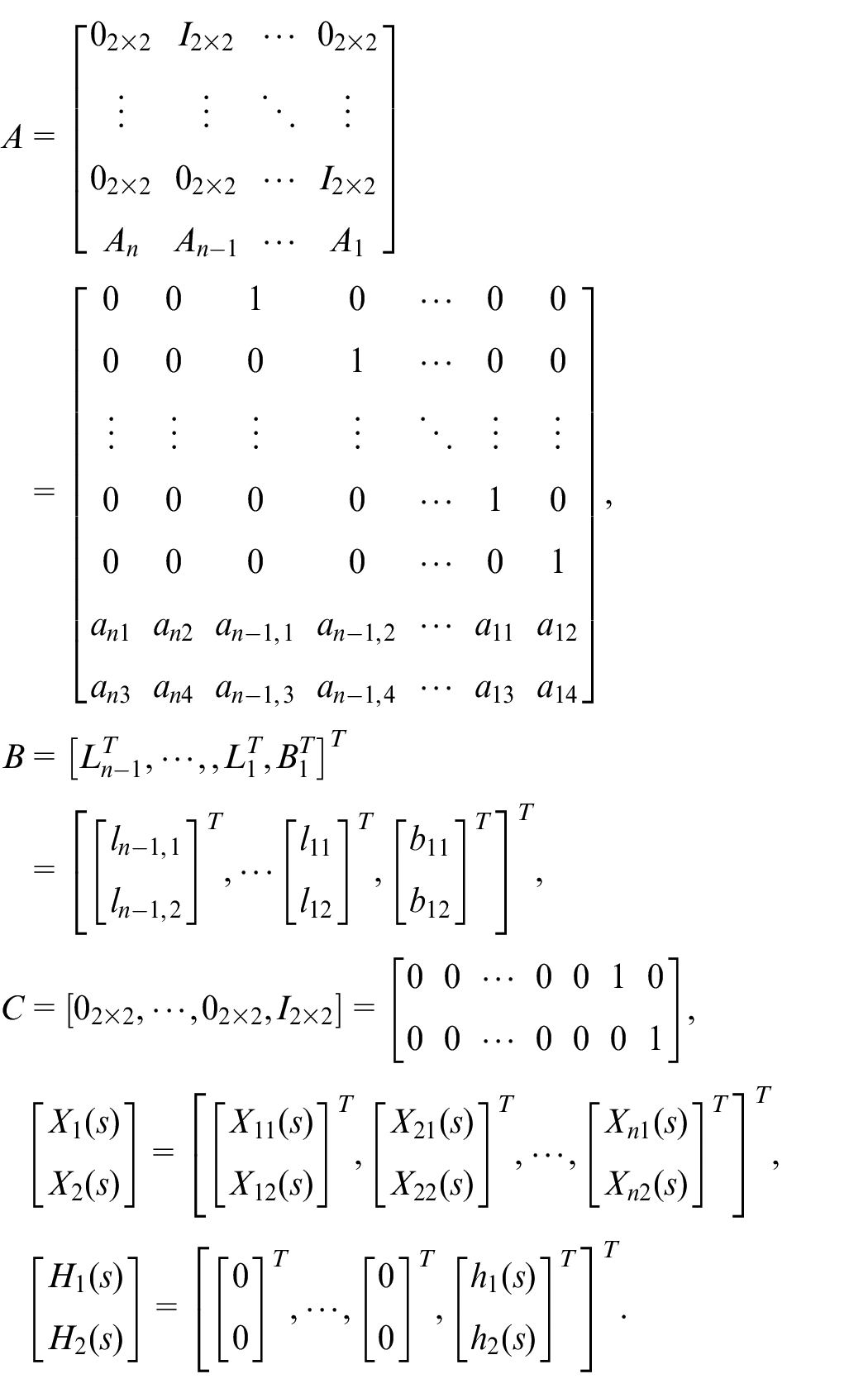
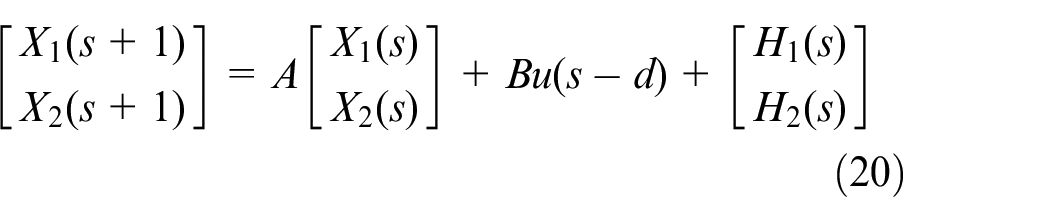
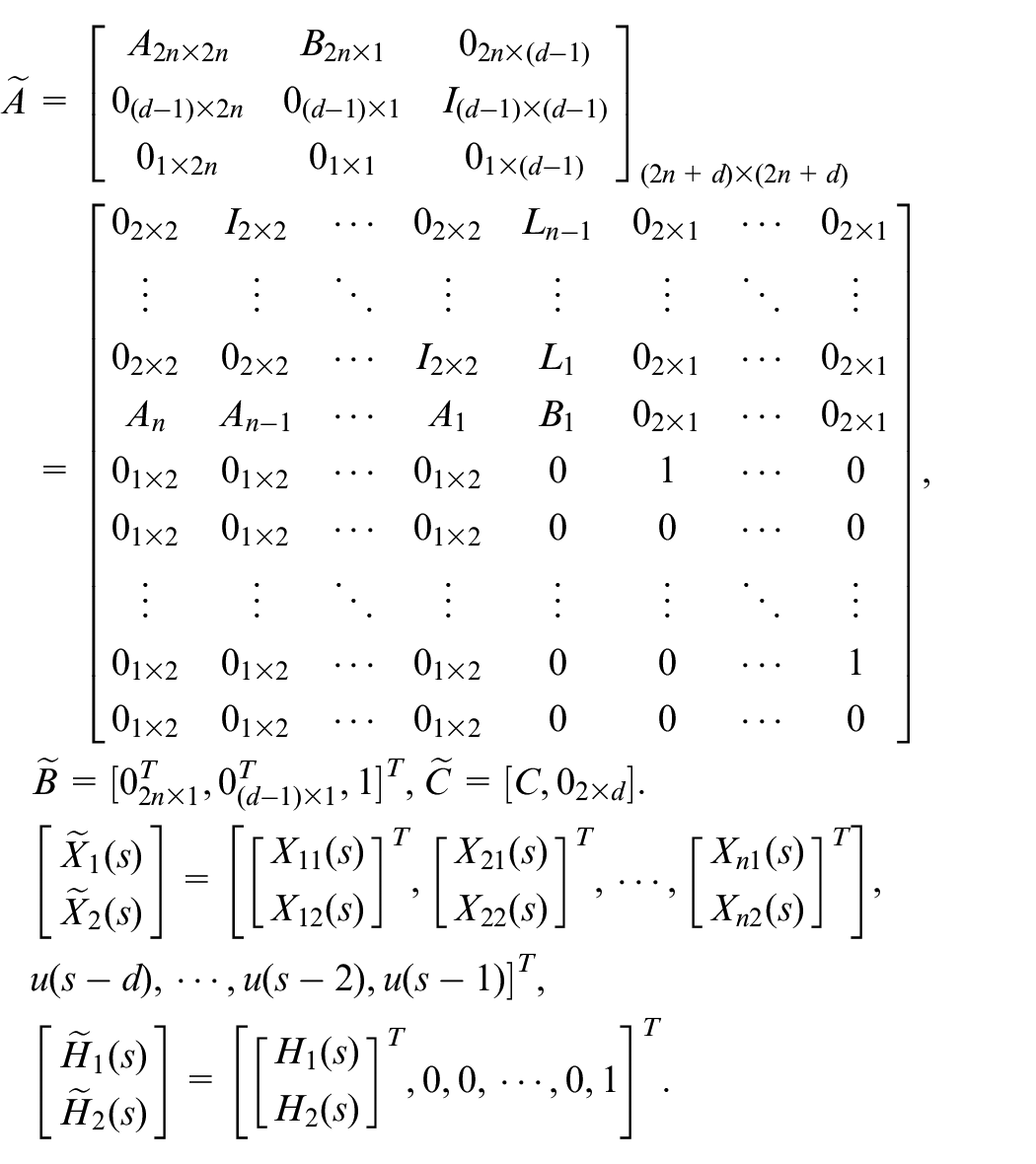
A new state equation without input-delay is constructed by using the state augmentation method,26,27 let

The nonlinear state space model can be shown as

where we assume the system is presented by using the pair
Stability definition and analysis based on moving pattern
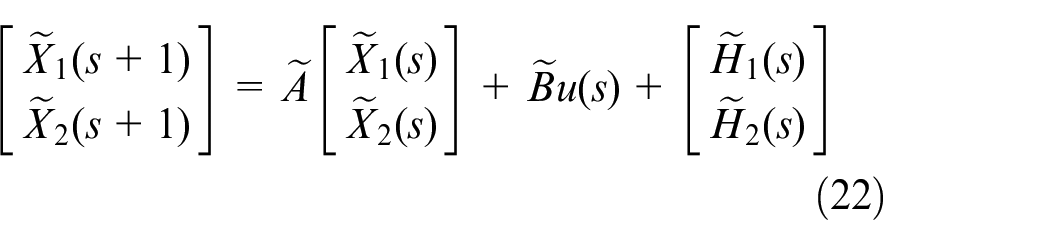
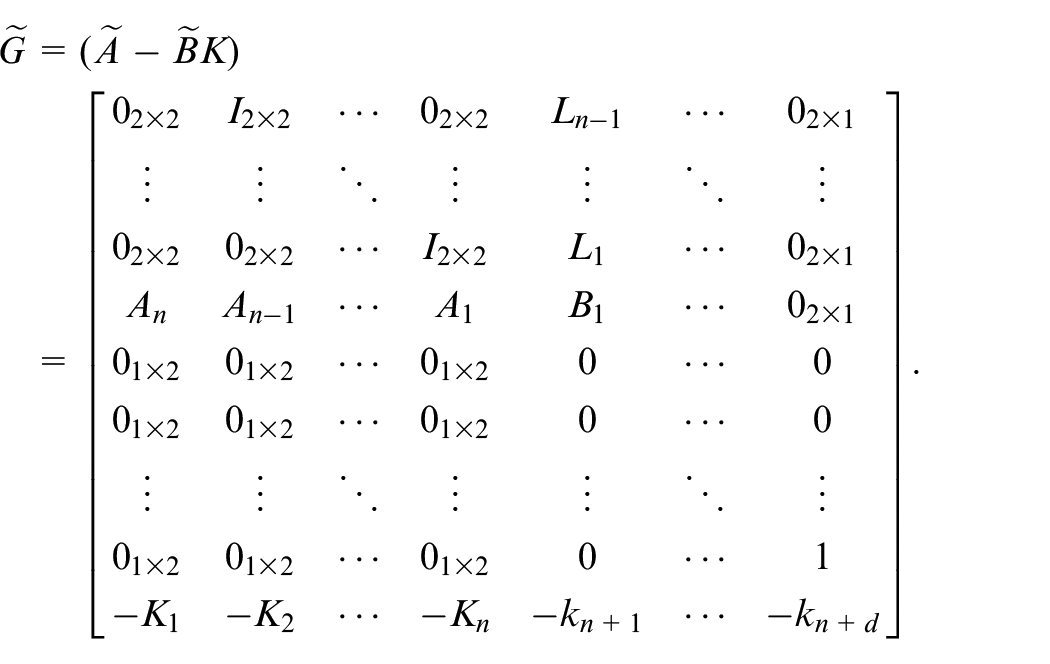
Let the system state feedback control law

where

Thus, formula (22) can be expressed as

where
(1)
(2)
(3)

the nonlinear system (25) is asymptotically stable in equilibrium point
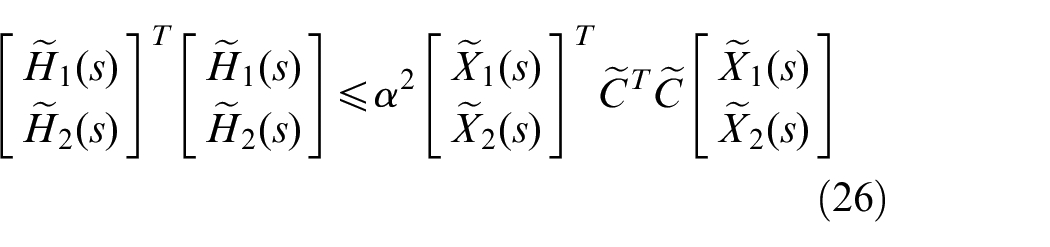
where
Note that condition (26) is equivalent to
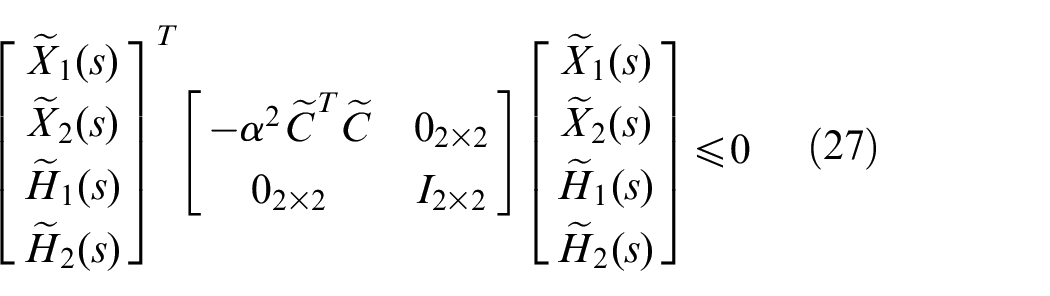
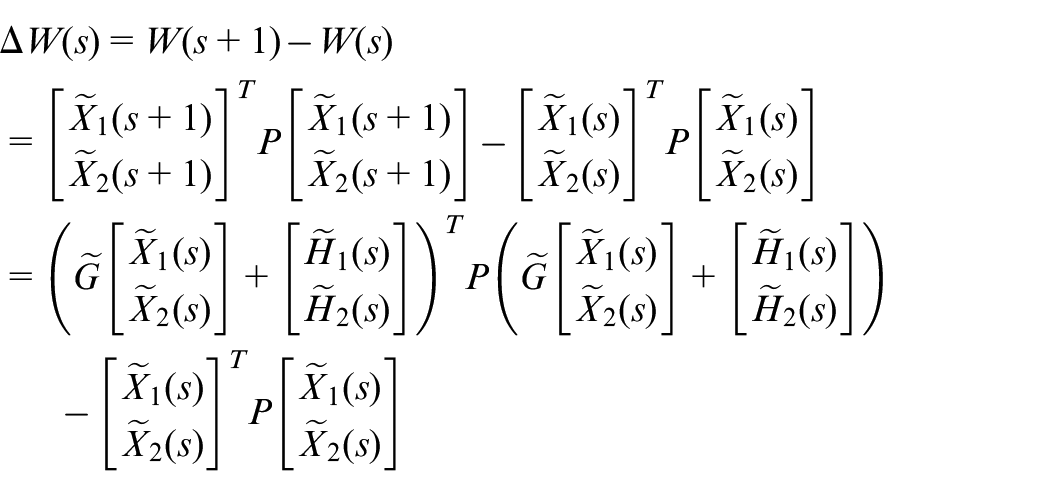
The Lyapunov function is defined as follows

Thus,
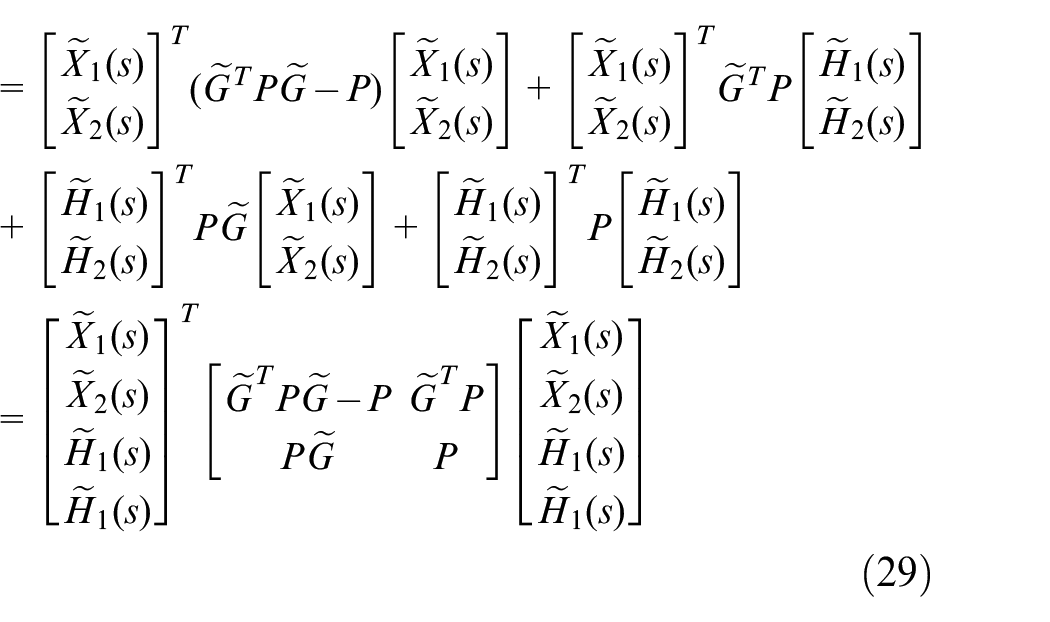
Suppose

By the S-procedure,
28
inequality (29) with constraint (27) is equivalent if exist matrix

And when

where
The proof is finished.
where
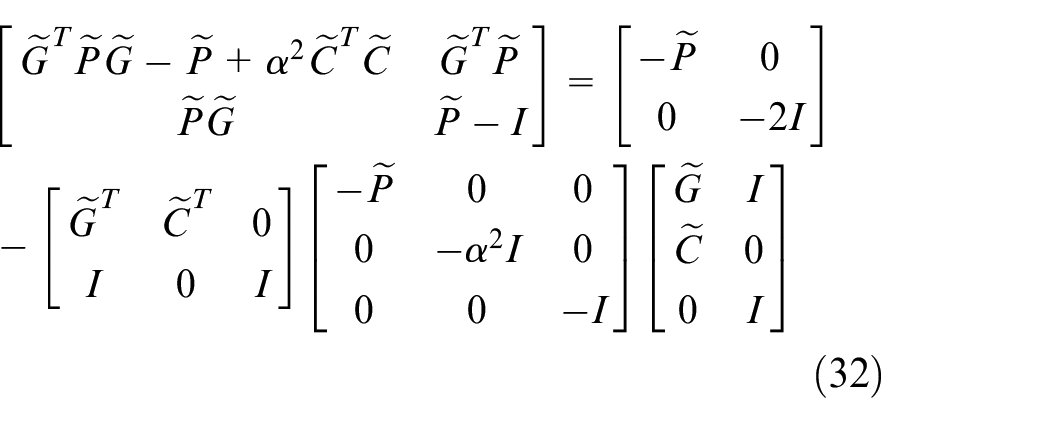
Let
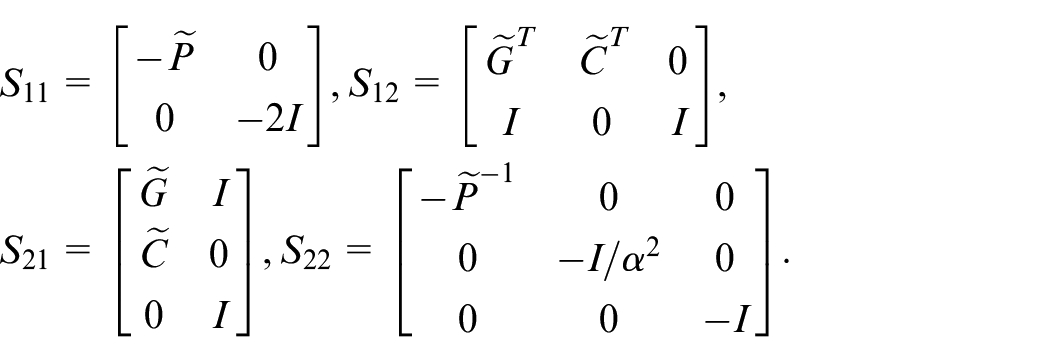
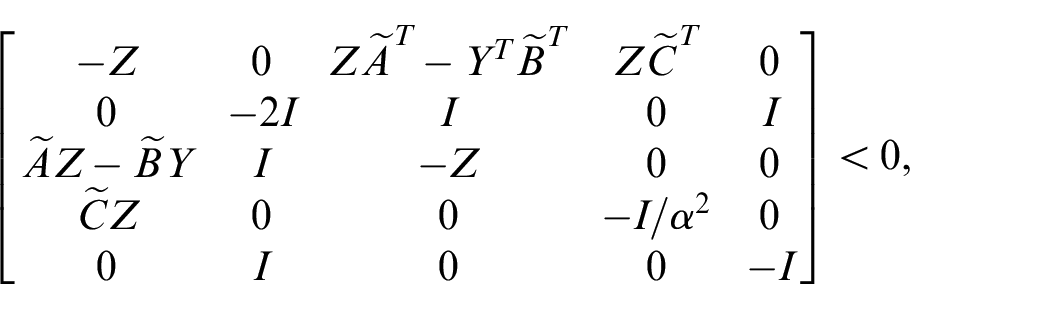
According to Lemma 1 (Schur complement), (32) is equivalent to (33)
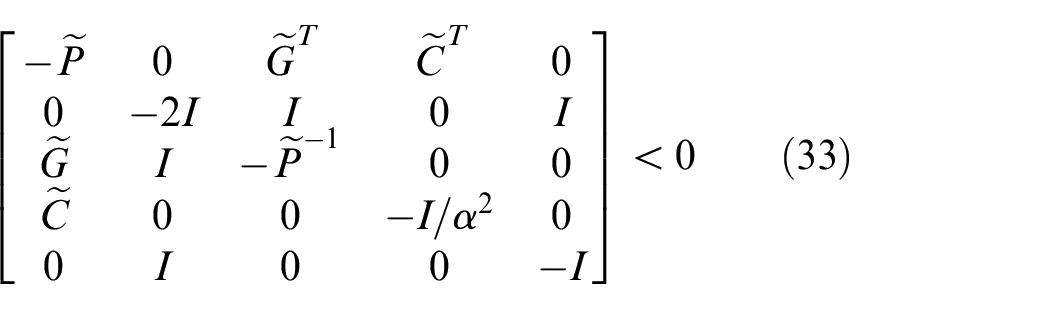
Multiplying
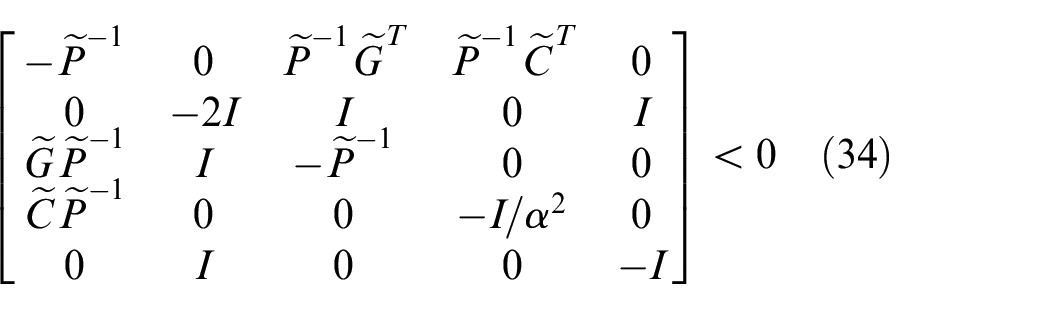
that is,
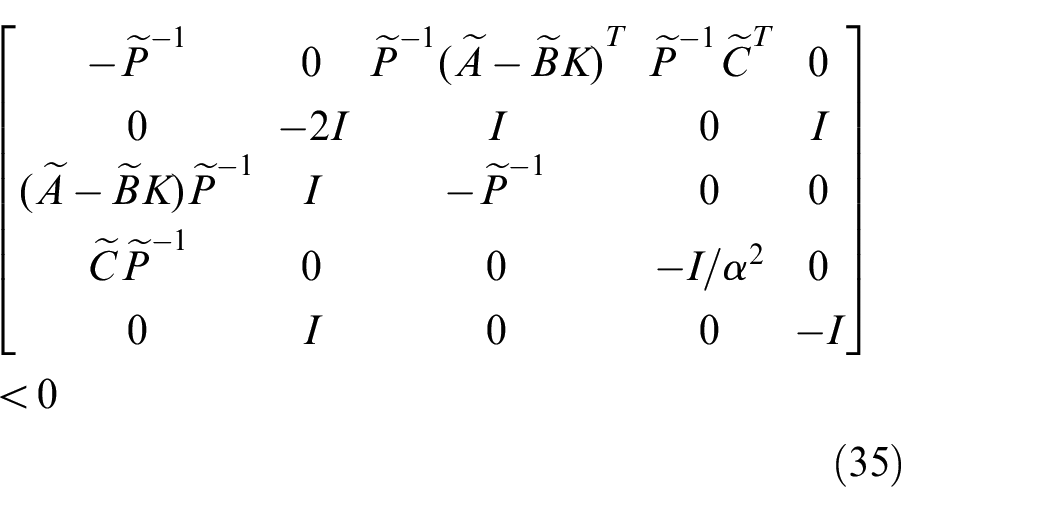
Let
Thus, system (25) is asymptotically stable if matrices

According to Theorem 1 and Theorem 2, system (25) is asymptotically stable, and thus system (22) is robustly stable by Definition 2.
Simulation experiment
In this section, two-dimensional case is considered as an example to illustrate the correlated process of the multi-dimensional moving pattern. The raw input-output data is collected from a sintering process in Anyang iron plant. We collect 1905 sets of production conditions data including temperature and pressure of bellows, ignition temperature. The ignition temperature is used as raw input data to the sintering process. The temperature of the last three bellows on the east and west sides and pressure of the last three bellows are taken as raw output data.
Two-dimension “pattern moving space”
In order to remove noise and reduce fluctuation degree, a filter method is used to dispose the collected raw input-output data. And the z-score as a standardized method is applied to process data such that normalized data is obtained. And in order to reduce the dimension, the principal component analysis method is used to extract feature variables as the output of system model, a two-dimensional system output data can be obtained. The input-output data after preprocessing is shown in Figure 3.
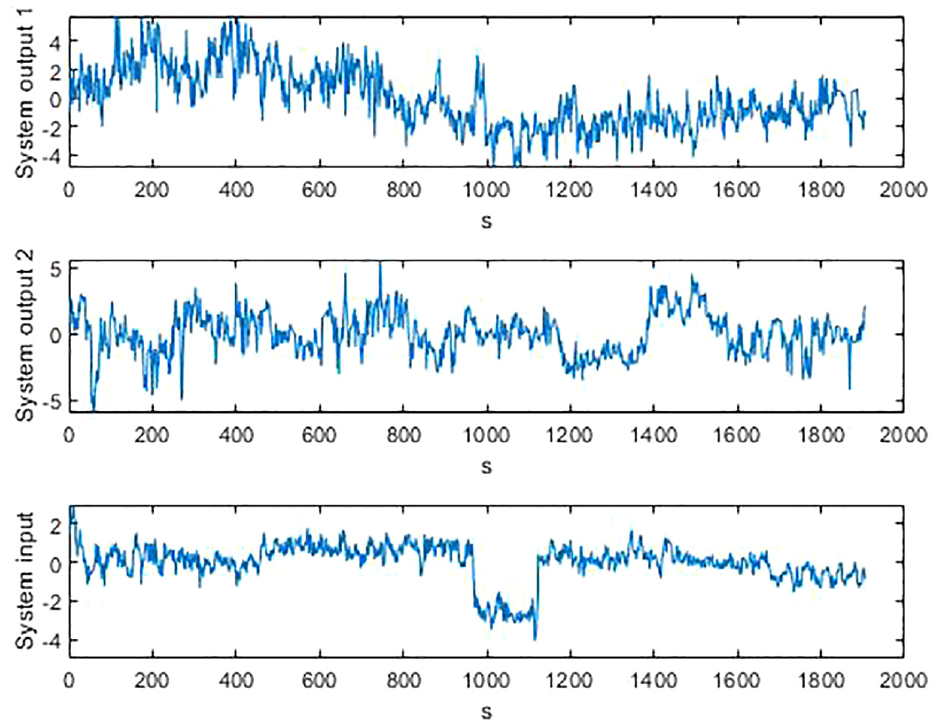
Normalized input-output data.
The maximum entropy clustering method is used to structure two-dimensional “pattern moving space” by data after dimension reduction divide classes. In this paper, let
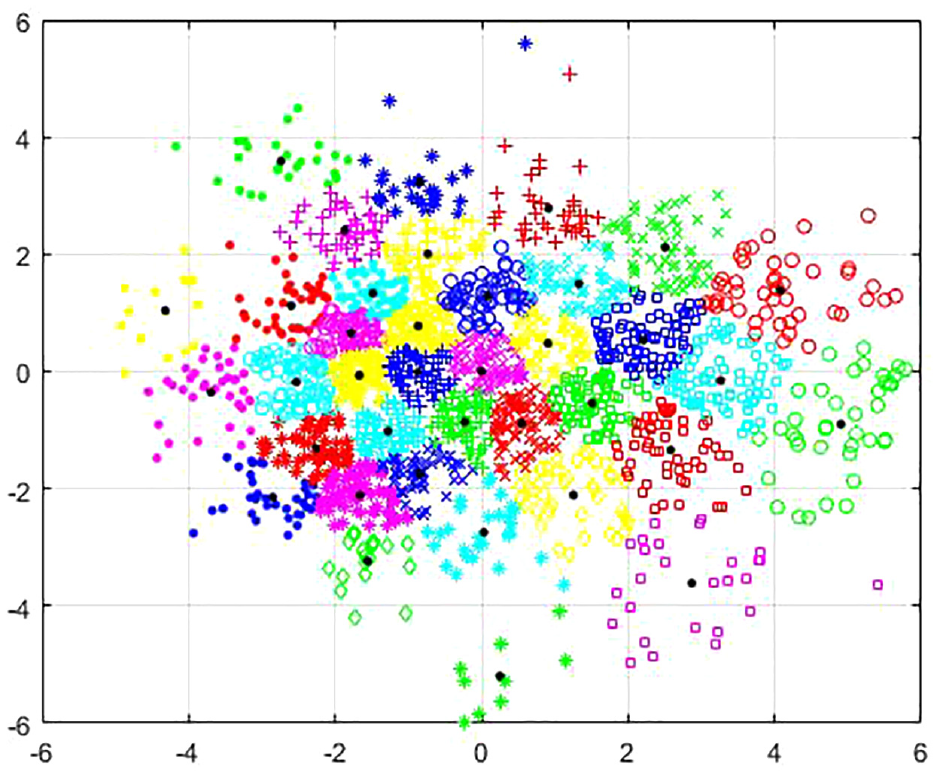
The results of two-dimensional clustering.
Those variables that describe pattern class changes are defined as two-dimensional pattern class variables. The two-dimensional “pattern moving space” is constructed by these pattern class variables. Then these pattern class variables are mapped to the trajectory points of Euclidean space. The measured output sequence is the measurement value sequence of pattern class variables after the pattern classes are measured to Euclidean space.
All samples belonging to the same pattern classes can be represented by the same measure values, that is, the class centers of the output pattern, as shown in Figure 5.
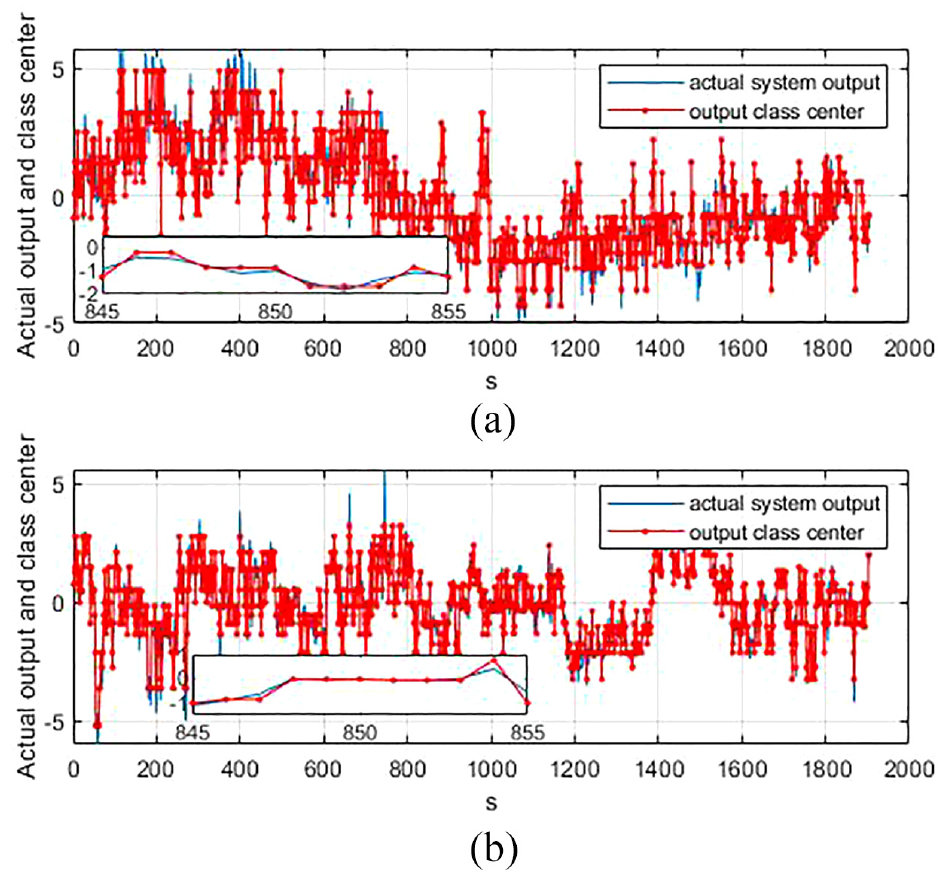
Actual output data and measurement values of pattern class variables. (a) The first dimension and (b) the second dimension.
The nonlinear state space model of control system
In Euclidean space the initial control model of system is constructed by using linear AutoRegressive eXogenous model. And the least square method is used for the identification model parameters. Then input-output data from sintering process are applied to establish the initial prediction model. Let input and output order
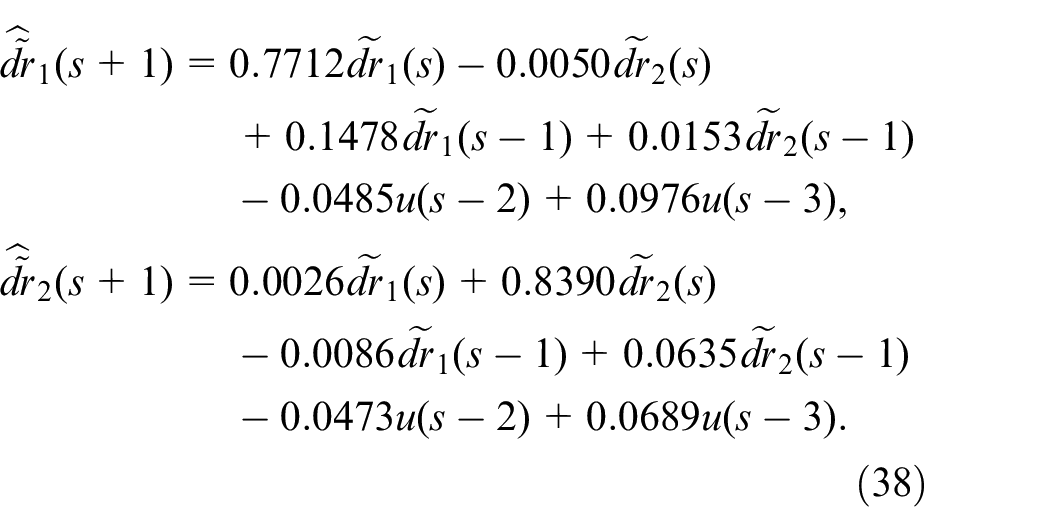
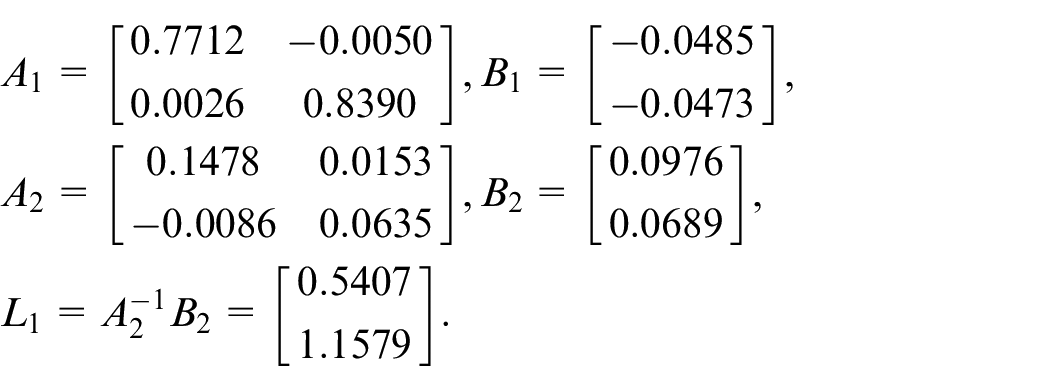
Therefore, model parameters can be expressed as
The results before and after classification are compared, as shown in Figure 6. It can be seen from the comparison results that the prediction accuracy after classification is higher.
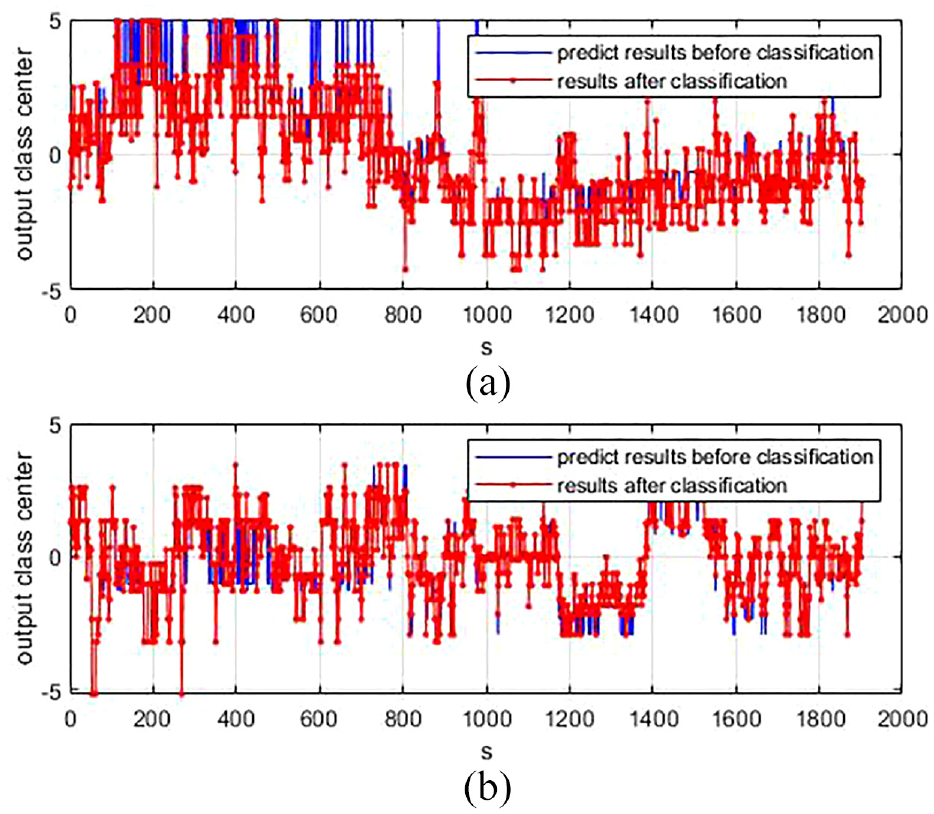
Prediction model results before and after classification. (a) The first dimension and (b) the second dimension.
System matrix
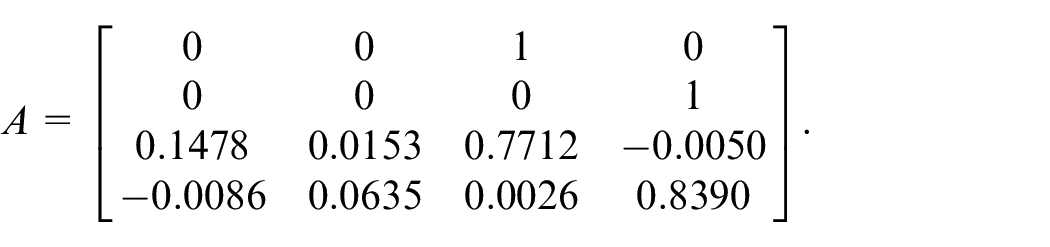
A state augmentation method is used, that is,
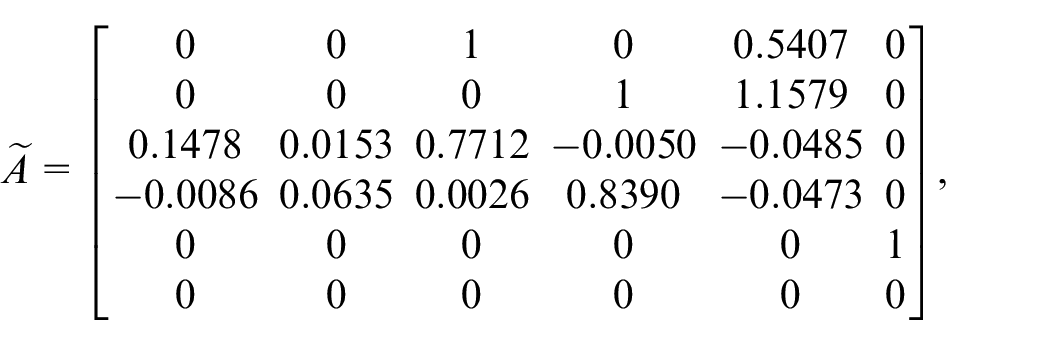

Thus, the nonlinear system can be shown as (39) and (40)
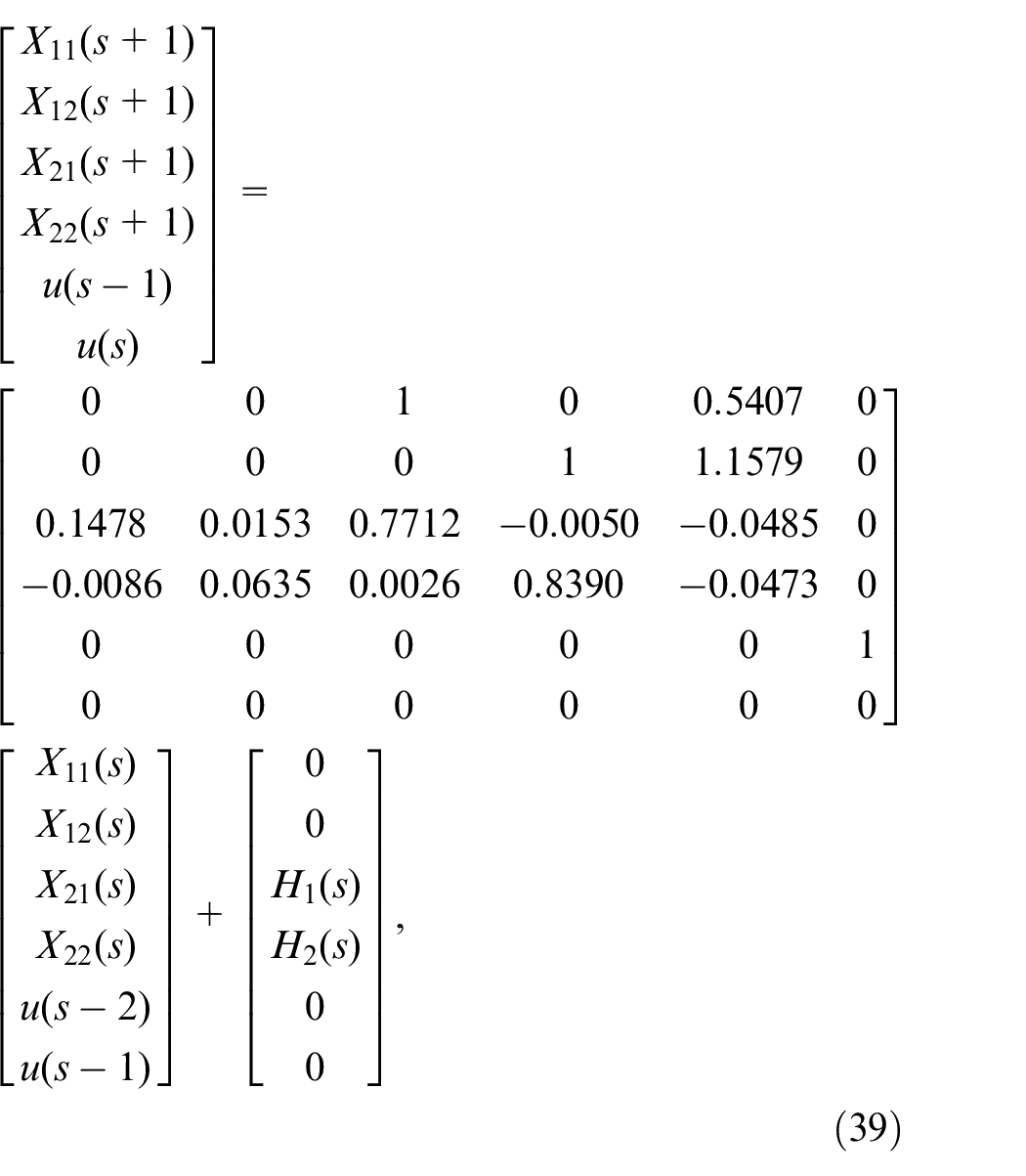

Let
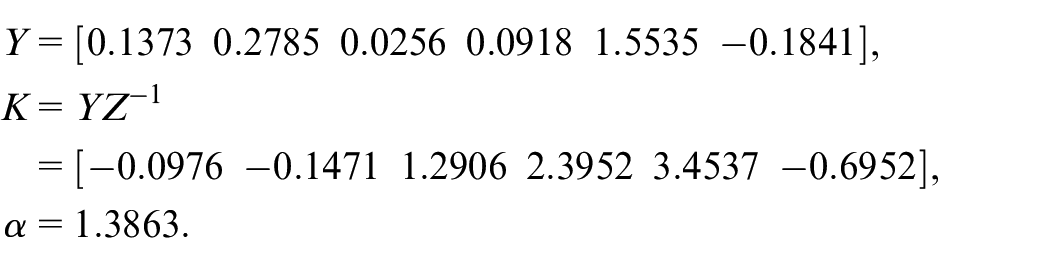
The system control quantity

Thus, the system matrix
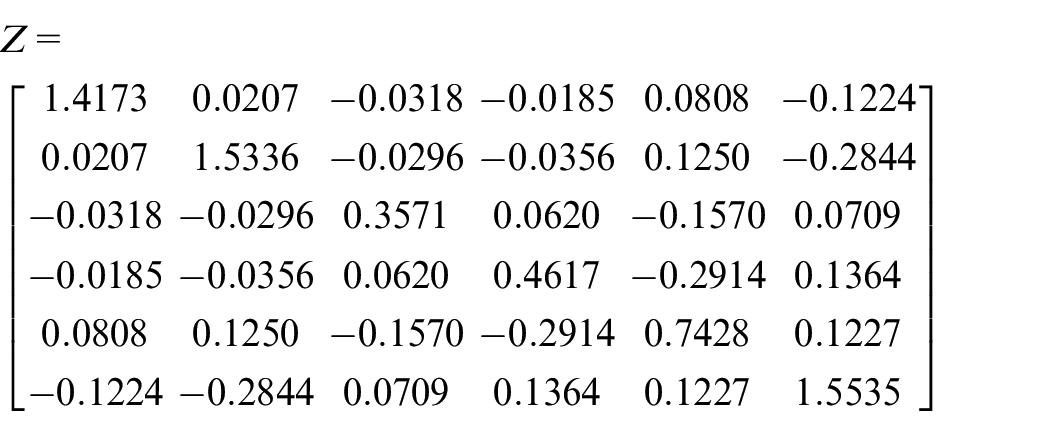
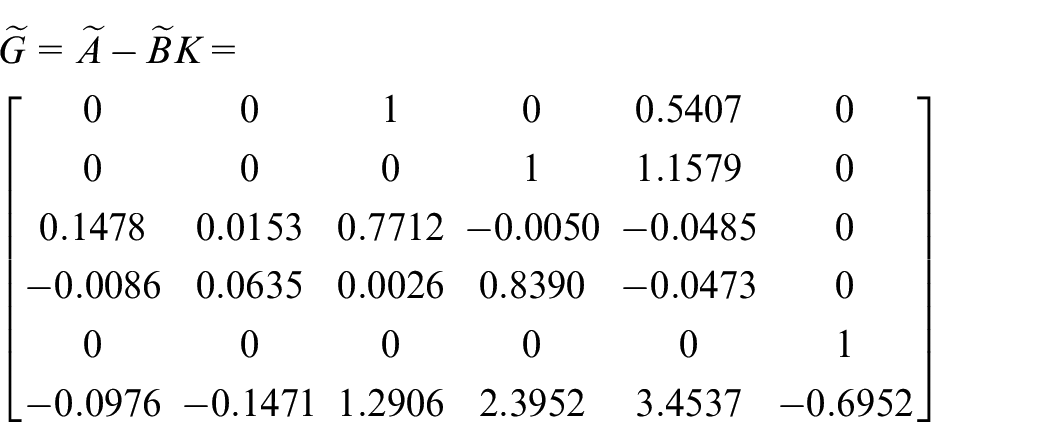
It can be verified that
The initial state
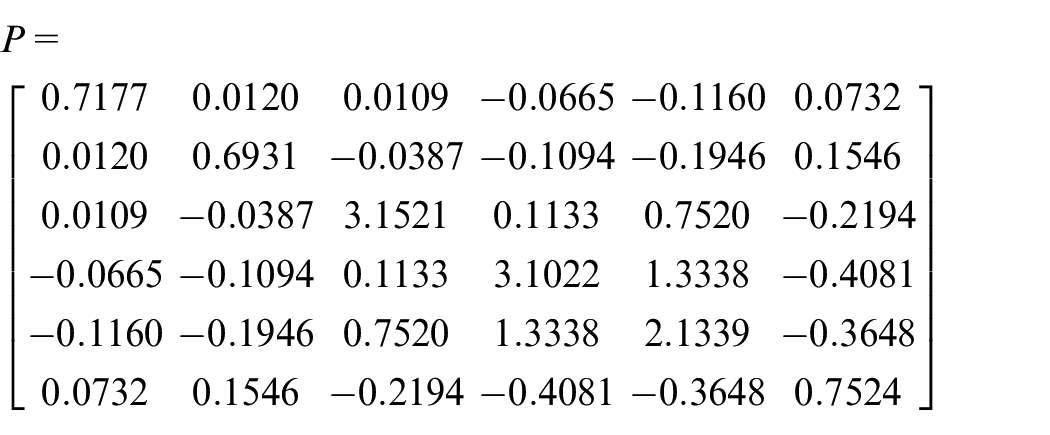
System output curves of burning processes. (a) The first dimension and (b) the second dimension.
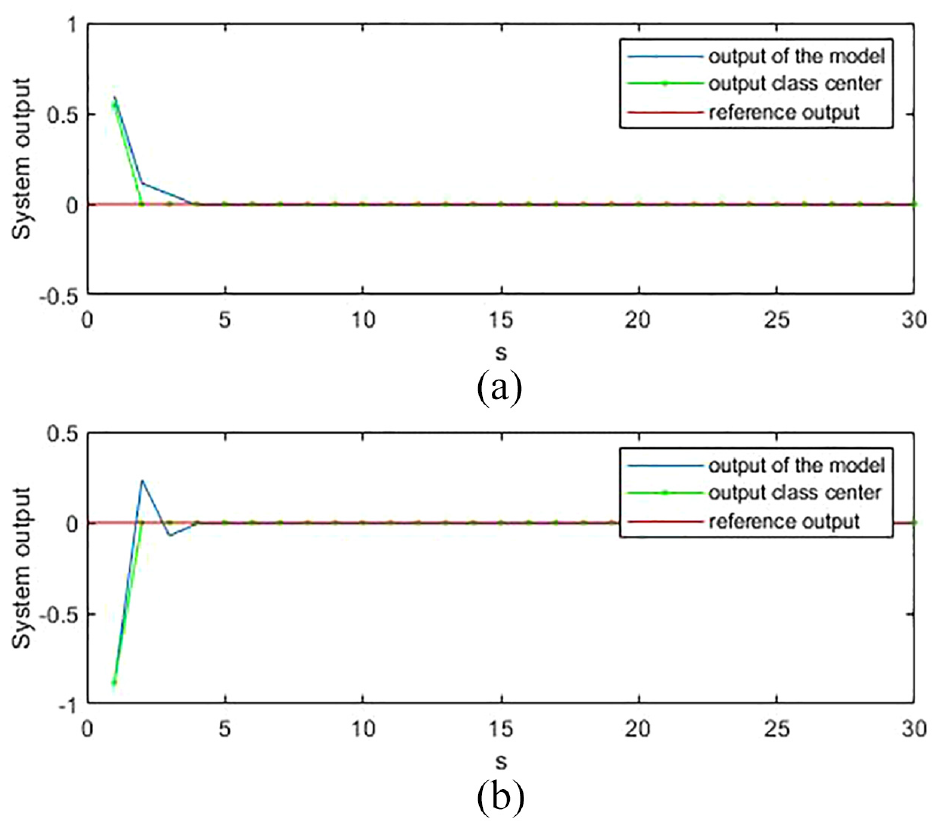
In Figure 7, the blue line is actual output of the model, the green line represents the values measured by measurement map. The blue line and green line is smooth gradually that it can be seen from Figure 7. The output rapidly reaches the stable point through classification and measurement when the output of system enters the class belonging to the stable point. Thus we can conclude that the system is stable. In addition, by using the unclassified output to build the model, we find that the classification process will have a certain impact for the stability of system. In order to verify the effectiveness of the proposed method, comparative analysis before and after classification is conducted in Figures 7 and 8. The results before classification are shown in Figure 8. It can be seen from Figure 8 that the system did not reach the stable state of
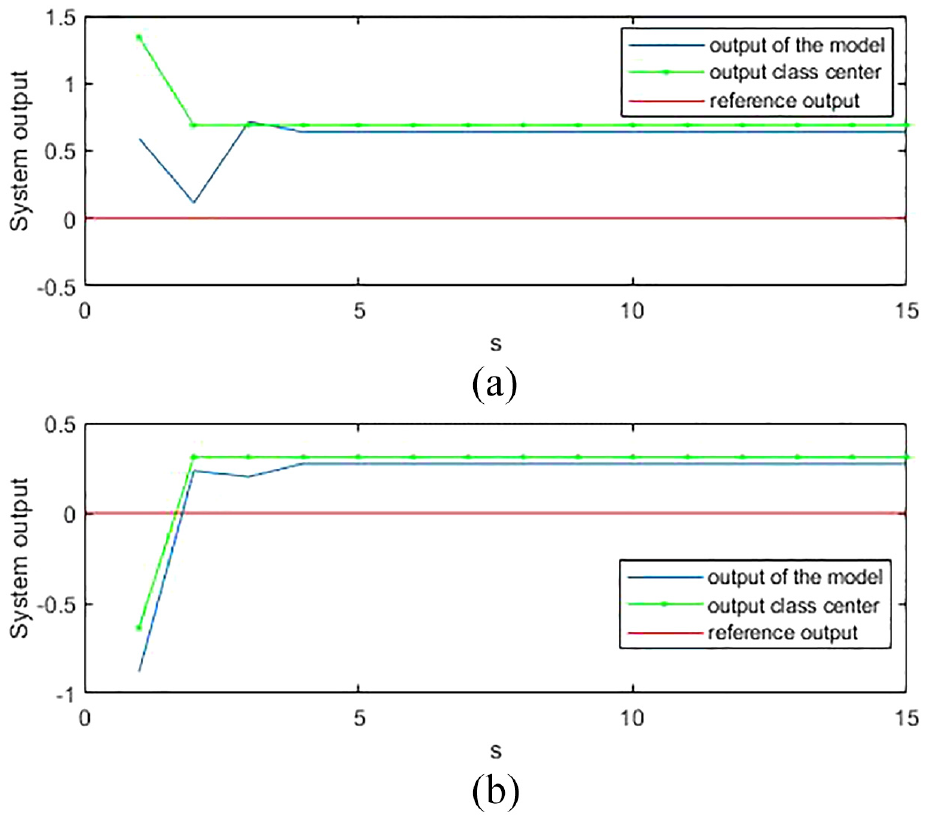
The system output before classification. (a) The first dimension and (b) the second dimension.
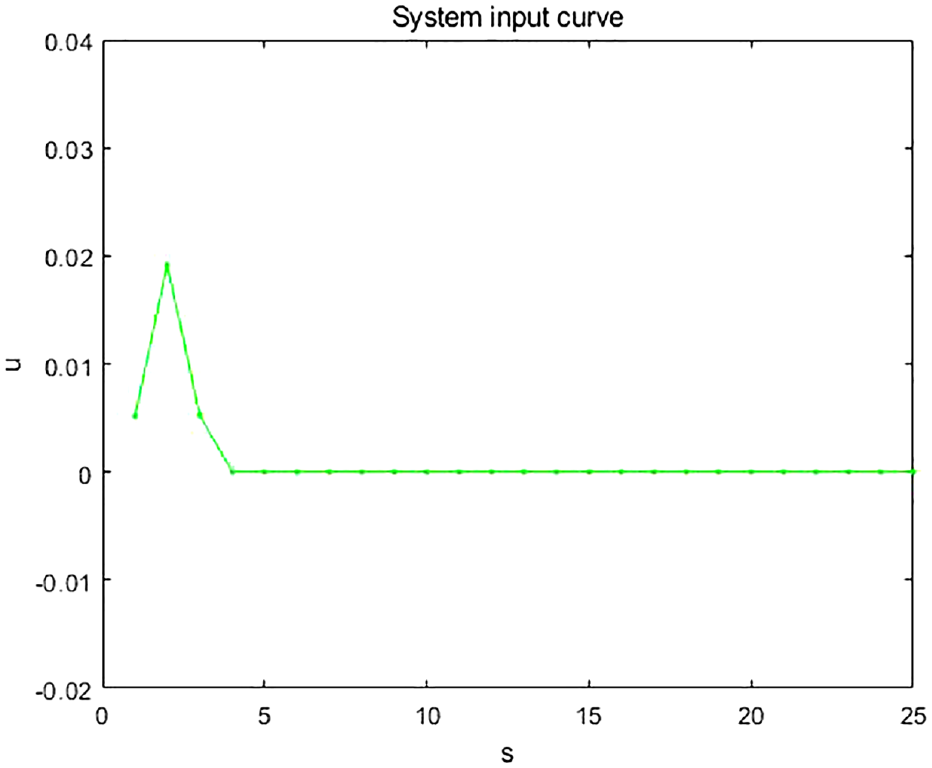
The system input curve.
Conclusions
This paper addressed robust stabilization and state feedback control problem of a class of complex systems with input-delay. Using the idea of moving pattern, the collected data is divided into
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (No.61903167).
Data availability statement
The data that support the findings of this study are available on request from the corresponding author. The data are not publicly available due to privacy or ethical restrictions.