
Abstract
Piezoelectric micropositioning systems (PMSs) have been widely utilized in the high-precision manipulation applications, but are also subjected to undesired nonlinearities, like hysteresis, and parameter uncertainties. To solve this problem, this paper proposes a new robust sliding mode control scheme for a class of nonlinear PMSs with time-varying uncertainties. Different from the conventional sliding mode control (SMC), the proposed controller further combines the Fourier series-based function estimation technique, fuzzy logic system and adaptive learning algorithm to realize online estimation and compensation of system time-varying uncertainties without their boundary information. The adaptive laws of Fourier coefficients and fuzzy adjustable parameters are obtained via the Lyapunov stability theory. Compared with the existing SMC methods, the proposed control effectively eliminates the control chattering problem, and guarantees the convergence of the tracking error in finite time in the presence of time-varying uncertainties. Theoretical analysis and numerical simulation results show that the proposed control strategy can meet the high-speed, high-precision robust tracking performance requirements of PMSs for micro/nano-manipulation applications.
Keywords
Introduction
With the rapid growth of high-precision requirements for manufacturing industry, micro/nano-manipulation technology has been paid much attention. Piezoelectric micropositioning systems (PMSs), as typical devices in this field, have widely used in the ultra-high precision positioning applications due to its compact structure, fast response speed, large output force and high resolution, such as scanning probe microscopy, biological cell manipulation, MEMS assembly.1–3 However, due to the adverse nonlinearities including hysteresis, parameter uncertainties of PMSs, it is a great challenge to achieve high-speed and high-precision control performance. 3 Therefore, it is necessary to design an effective and feasible control strategy to overcome these nonlinearities.
Hysteresis is a nonlinear behavior between the input voltage and output displacement of a piezoelectric actuator. As one of the main reasons for affecting the performance of PMSs, if it is not controlled, serious open-loop positioning errors will occur, especially at high frequencies. 4 To suppress this nonlinearity, a straightforward approach is to build a feedforward compensator based on an inverse hysteresis model. Commonly used hysteresis models include Preisach model, 5 Prandtl-Ishlinskii model, 6 and Bouc-Wen model. 7 However, in practice, the hysteresis cannot be completely eliminated because the feedforward control depends on the identification accuracy of the hysteresis model. To achieve high-precision tracking performance, feedforward plus feedback control methods are often used to suppress hysteresis nonlinearity and other uncertainties.8–11 In addition, to avoid the complex process of hysteresis modeling, independent feedback control methods are also widely used for tracking control of PMSs. Such methods generally treat hysteresis as an unmodeled uncertainty, and then construct a robust controller to compensate, such as sliding mode control,12–17 iterative control, 18 and adaptive control. 19
As a simple and effective nonlinear control method, the sliding mode control (SMC) is popular because of its powerful ability to deal with uncertain problems of the system. However, in the traditional SMC design, the control law is generally discontinuous, which will cause chattering problems, and the linear sliding mode surface can only ensure asymptotic stability and cannot converge in finite time. To this end, many improved versions have emerged. The terminal sliding mode (TSM) control adopts nonlinear sliding mode surface, and can ensure finite-time convergence. 20 However, the existence of negative fractional powers may lead to singularities at the equilibrium point. 21 Thus, the nonsingular TSM (NTSM) control was provided, 22 but the chattering problem still existed. The so-called fast NTSM (FNTSM) control was first proposed in Yu et al., 23 which not only keeps the advantages of NTSM control, but also avoids the chattering because the control law itself is continuous. Furthermore, by utilizing a fast TSM-type reaching law, the system can be stabilized faster in finite time. However, no matter it is SMC methods or its improved forms, the boundary value of uncertainties needs to be known, which is difficult to realize in practice.
To overcome the above shortcoming and improve the robustness of the system, many estimation techniques have been reported to estimate system uncertainties online, such as disturbance observer (DO), 24 fuzzy logic systems (FLS),25–27 perturbation estimation (PE),28,29 and function estimation technique (FET).30,31 In the design process of the DO, the bandwidth and order of the low-pass filter play a decisive role in the stability of the system, so it needs careful design and is difficult to implement. Although FLS can approximate any nonlinear function with arbitrary precision, it is difficult to guarantee the stability and robustness of the system because the selection of fuzzy rules depends on expert experience, and then needs to combine with other robust controllers. The PE methods are simple in design, but requires full state feedback. Compared with the above methods, the FET does not require full state feedback, and has the characteristics of determinacy and least mean square approximation. In view of these advantages, this paper will use the FET to observe the system uncertainties.
To this end, the objective of this paper is to propose an enhanced FNTSM control method to further improve the robust performance of a class of PMSs with time-varying uncertainties. In particular, the FET based on Fourier series is firstly used to estimate the uncertainties of the system, and then the FLS is applied to compensate the estimated error, and the corresponding adjustable parameters are updated online with the designed adaptive laws via Lyapunov stability. With the help of FET and FLS, the proposed control not only overcomes the limitation of the FNTSM control relying on prior boundary information, but also ensures the convergence of the system tracking error in finite time, which obviously improves the tracking accuracy. Finally, a series of simulations are conducted and verify the effectiveness and superiority of the proposed control. The main contributions of this paper include: (1) an FET based on Fourier series and an FLS are combined for the first time to estimate the time-varying uncertainties of the piezoelectric micropositioning system; (2) new Lyapunov theory based adaptive laws are designed to update the adjustable parameters of the controller online.
The organization of this paper is as follows: Section 2 presents the dynamic model of a class of PMSs, and briefly describes the Fourier series-based FET and FLS; after that, the design process of the proposed controller and its stability analysis are carried out in Section 3; then, the simulation verification and discussions are conducted in Sections 4 and 5, respectively; finally, Section 6 summarizes this paper.
Problem statement and preliminary
System description
Considering the fact that there often exist time-varying uncertainties such as external disturbances and hysteresis in the actual PMSs, without loss of generality, here we take a class of single-input single-output (SISO) PMSs for example, and the dynamic model can be described as follows 27 :

where


where

where
Due to the existence of time-varying uncertainty
FET based on Fourier series
For any piecewise continuous function

where
Define


Then, equation (3) can be rewritten as

where

The advantage of using equation (7) to estimate the system uncertainty is that it converts the unknown time-varying function into a time-varying basis function vector
It can be seen from equation (6) that the estimated error
Overview of FLS
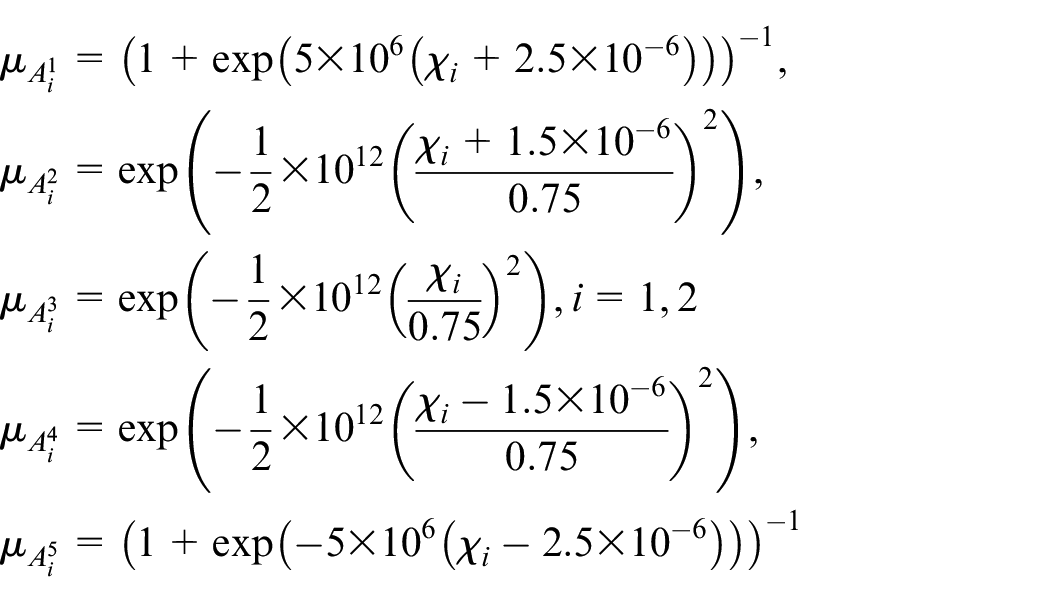
The rule base of the FLS used to compensate the estimated error can be regarded as the mapping from the input variable

where
where

Controller design
The control goal of this paper is to design a robust controller that can quickly and accurately track the reference displacement command even when the PMS has model uncertainty and external disturbances. To this end, the controller design is mainly divided into three steps: first, the FET is used to estimate the uncertainty of the system, and the FLS is then adopted to compensate the estimated error; after that, the proper adaptive laws are selected through the Lyapunov stability theory to update the adjustable parameters online; finally, the control law is derived by improving the FNTSM control.
Control law
The tracking error is defined as

where

where

For any given initial condition, the above equation can converge to zero in finite time, and the stable time can be expressed as

Taking the derivative of equation (13) with respect to time, we can get

Ignoring external disturbance and system uncertainty, the equivalent control input is obtained by substituting equation (2) into equation (15) as

In order to improve the robustness of the system and realize fast and continuous control, the following fast TSM reaching law is selected 23 :

Then the control input can be given as

where
It can be seen from equation (18) that the FNTSM control law depends on the boundary information of


where


where

To ensure the control stability of the closed-loop system and overcome the shortcomings of traditional methods relying on disturbance boundary information, the following improved FNTSM control input is selected:

where
Stability analysis

where

(i) all signals in the closed-loop system are bounded;
(ii) if the nonlinear function


with
(i) Considering the following Lyapunov function:

with

Substituting equation (2) into (15) and combining equation (24) gets

And substituting equations (16), (23), and (19) into (31) yields

with

Next, substitute equation (33) into (30) to get

where

According to the adaptive laws (21)−(22) and (36), we can get

it is obvious that

Therefore, all signals in the closed-loop system are bounded.
(ii) Choose the Lyapulov function

Since all signals in the closed-loop system are bounded and
Obviously, equation (41) satisfies the finite-time stability condition in Lemma 1. Therefore, the TSM surface is reachable in finite time, and the convergence time is

Then, it can be obtained that the tracking error
In order to deduce that equation (43) satisfies the finite-time stability condition in Lemma 1, equation (43) is rewritten into the following two forms:


For equation (44), if
It can be found that the structure of equation (46) is the same as that of equation (41). Therefore, in order to realize the stability of equation (46) in finite time, it is necessary to ensure that the condition

In other words, the sliding mode variable s can converge to the following region in finite time

Likewise, the conditions for achieving finite-time stabilization for equation (45) are

and
Combining equations (48) and (49), it can be obtained that the sliding mode variable s converges to the region

Then, for any
It shows that
To obtain the results in equations (27) and (28), the TSM surface (12) is rewritten as

When

According to equations (52) and (53), it can also be deduced that the tracking error e converges to the region within a finite time

Thus, the proof of Theorem 1 is completed.
In order to compare the superiority of the proposed controller with the adaptive fuzzy sliding mode with function approximation (AFSMFA) controller in Chen and Liang, 31 the control input and adaptive laws of the AFSMFA controller based on the boundary layer principle are also given as follows:
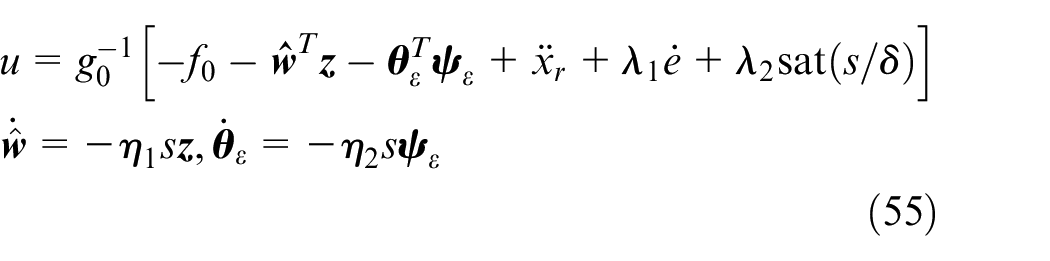
where

where
Figure 1 shows the control block diagram of the proposed robust controller. It is worth noting that if the system uncertainty

where
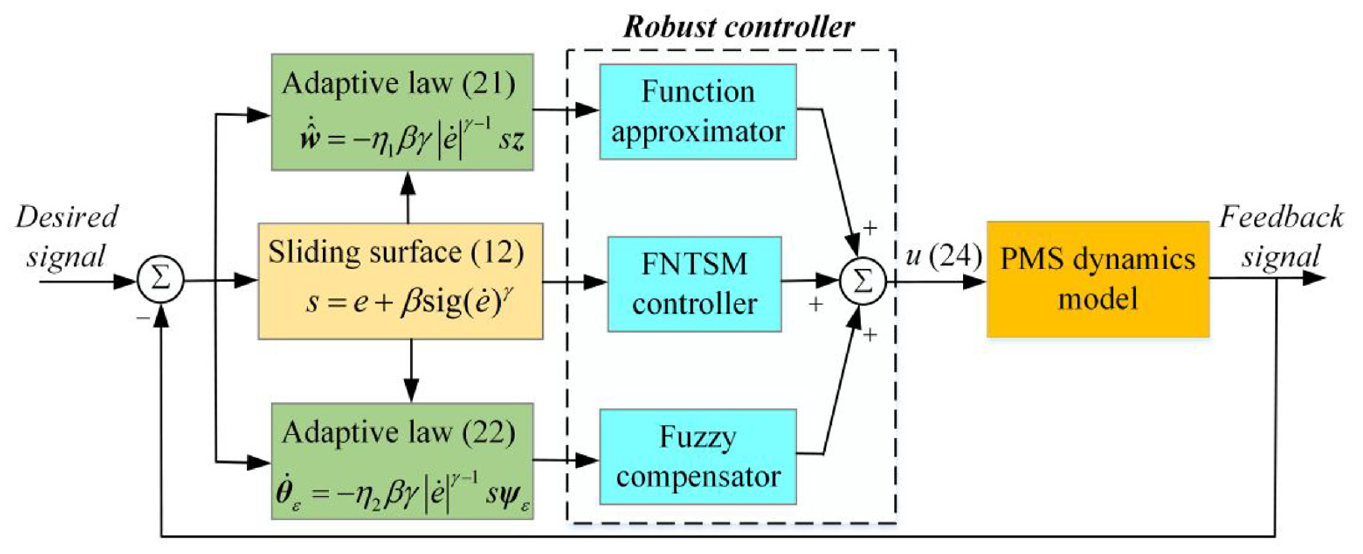
Control block diagram of the proposed robust controller for PMSs.
Numerical simulation
Controller setup
In order to verify the performance of the designed robust controller, without loss of generality, this paper takes the PMS in Li and Xu 29 for example. Since the positioning platform is well decoupled in the XY directions, each axial movement can be regarded as a single-input single-output system. Considering the X-axis motion, the dynamic model of the system can be expressed as follows:


where x is the displacement, m, b, k represent the mass, damping, and stiffness in the X-axis direction of the system, respectively; d is the piezoelectric coefficient, u represents the input voltage, and h represents the displacement hysteresis loop, whose shape is determined by the parameters
As reported in Li and Xu, 29 the model parameter values used in the simulation are given as


Considering that the model parameters may vary with the operating environment in the actual PMS, it is necessary to consider the uncertainty of the parameters. Assuming that the nominal values of the parameters

where
Since
According to the analysis in the previous section, it can be found that the proposed controller has obvious advantages over the traditional SMC methods. However, without exception, this method also needs to select appropriate control parameters to effectively exert the performance of the controller. According to the parameter selection method of the FNTSM controller in Zheng et al.,
33
for the nominal system (60), the control parameters are selected as follows:
Since multi-frequency, triangular, and swept-frequency signals are often used as reference signals in PMSs,4,28,33 the above signals are also adopted here to verify the tracking performance of the proposed controller. Besides, its robustness is also tested by time-varying parameters and external shock disturbances. For comparisons, the AFSMFA and FNTSM controllers are implemented with the same conditions. Table 1 lists the control simulation conditions for different performance tests, where the values of the system parameter m, b, k, d are randomly changed within
Control simulation conditions.
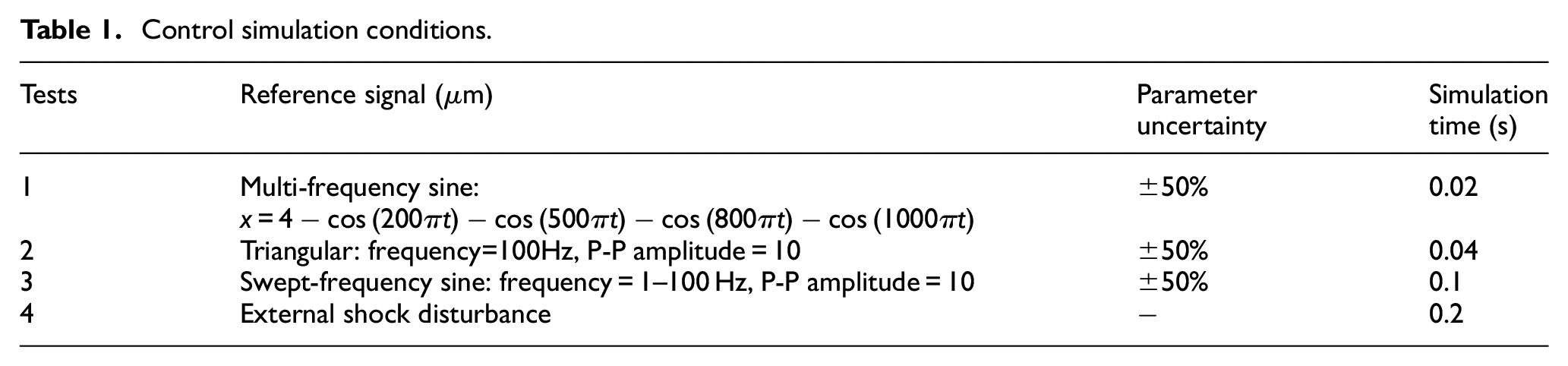
Different from literature,28,33,34 this paper not only considers the influence of time-varying uncertainty of system parameter m, but also analyzes time-varying uncertainties of parameters b, k, d and high-frequency external disturbances. Furthermore, the highest frequency of specified reference signals are up to 500 Hz, which will strongly demonstrate the superiority of the proposed controller.
Multi-frequency trajectory tracking test
Multi-frequency trajectories are often used in scanning probe microscopes as reference signals for tracking the shape of uniform or non-uniform surface profiles.
4
In these applications, especially in high frequency operation, the performance requirements of the controller are very demanding. Therefore, it is necessary to conduct Test 1 to evaluate the tracking performance of the controller. In this case, the proposed controller (24), the AFSMFA (55) and FNTSM (57) controllers are implemented according to the simulation conditions in Section 4.1. Figure 2 shows the time responses of positions, tracking errors, and control inputs for the three controllers in the PMS with/without time-varying uncertainties, respectively. It can be easily seen from the simulation results that when the system has no time-varying uncertainties, as shown in Figure 2(a) to (c), although all three controllers can accurately track the reference signal, the tracking error of the proposed controller is smaller compared with the other two controllers, and its maximum error is
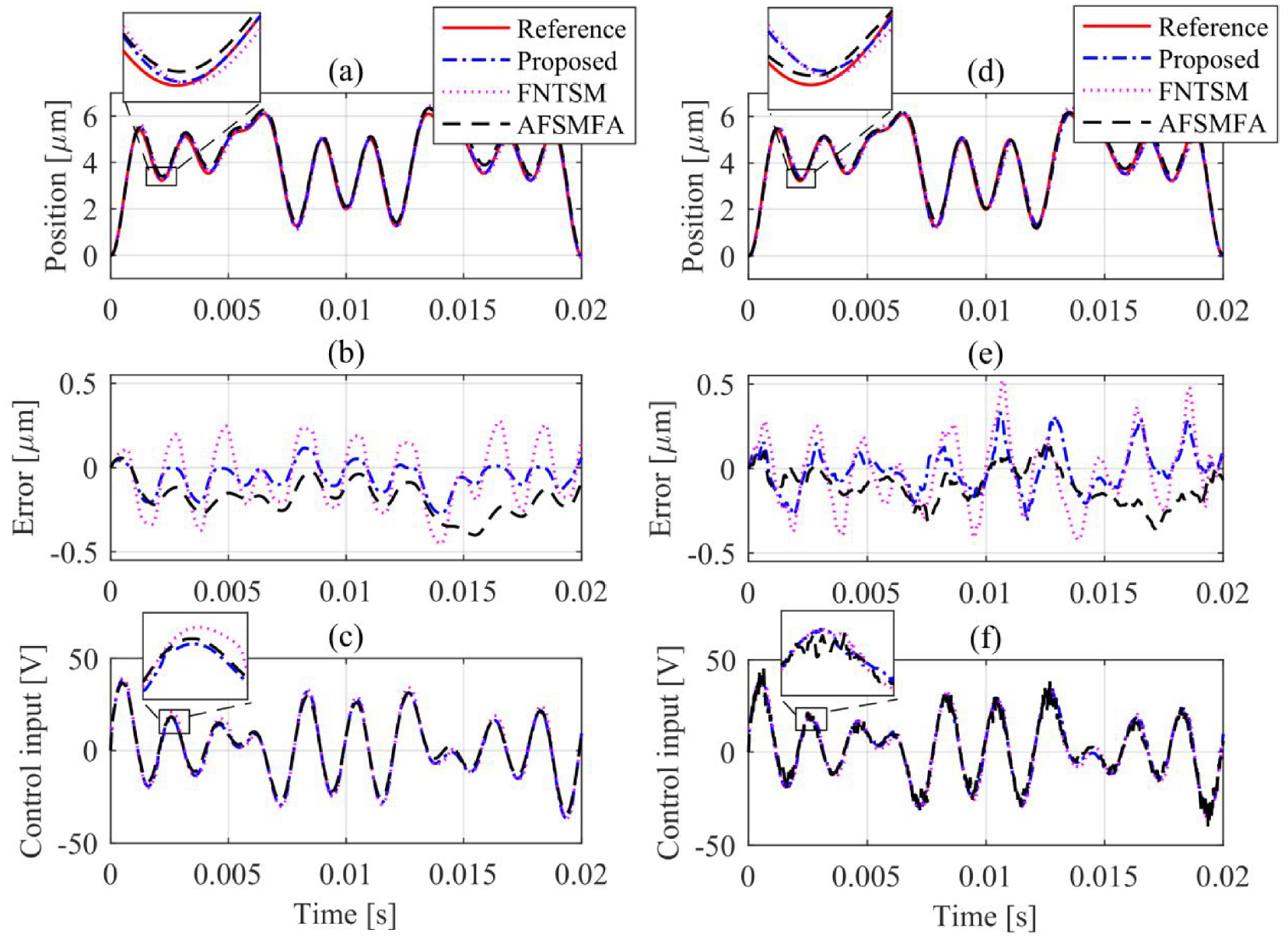
Multi-frequency trajectory tracking results: (a–c) without uncertainties, (d–f) with uncertainties.
Moreover, for the case with time-varying uncertainties, it can be found from Figure 2(e) that the tracking errors of the PMS increase for all three controllers. Nevertheless, the proposed controller can still guarantee the minimum tracking error margin
Triangular trajectory tracking test
Since the proposed controller considers continuous differentiable trajectories in the design process, it is very challenging to follow continuous but non-differentiable triangular trajectories. Thus, to further verify the tracking performance of the proposed controller, Test 2 is carried out. Similarly, three controllers are also implemented according to the simulation conditions in Section 4.1, and the simulation results are shown in Figure 3. It can be seen that the proposed controller can accurately track the triangular signal, and guarantee minimum error boundaries, which are
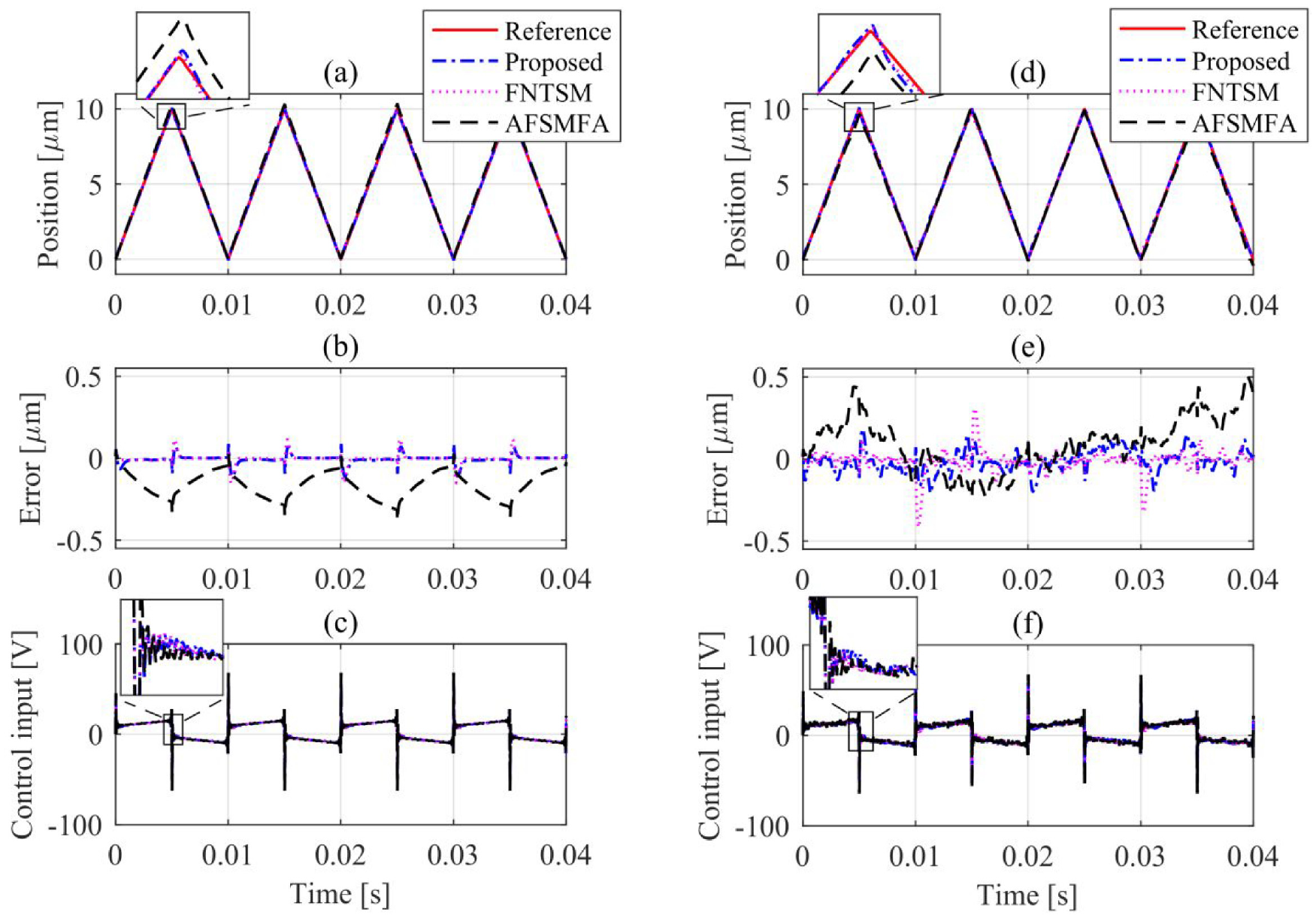
Triangular trajectory tracking results: (a–c) without uncertainties, (d–f) with uncertainties.
Swept-frequency trajectory tracking test
It is known that the hysteresis nonlinearity of PMSs is related to the input voltage frequency, and as the input frequency increases, the hysteresis effect becomes more serious. In order to verify the tracking performance of the proposed controller for variable frequency trajectories, the swept-frequency trajectory of Test 3 is carried out. In this case, three controllers are implemented with the same initial conditions in Section 4.1. Unsurprisingly, from the tracking results in Figure 4, it can be found that compared with AFSMFA and FNTSM control methods, the proposed controller can achieve the best tracking performance for both two cases. Although the tracking error of the proposed controller has slight chattering when the reference frequency increases, it is acceptable for high-speed operation with a bandwidth of up to 100 Hz. It also shows that the proposed controller can overcome the rate-dependent hysteresis nonlinearity and guarantee the tracking performance requirements of such trajectories.
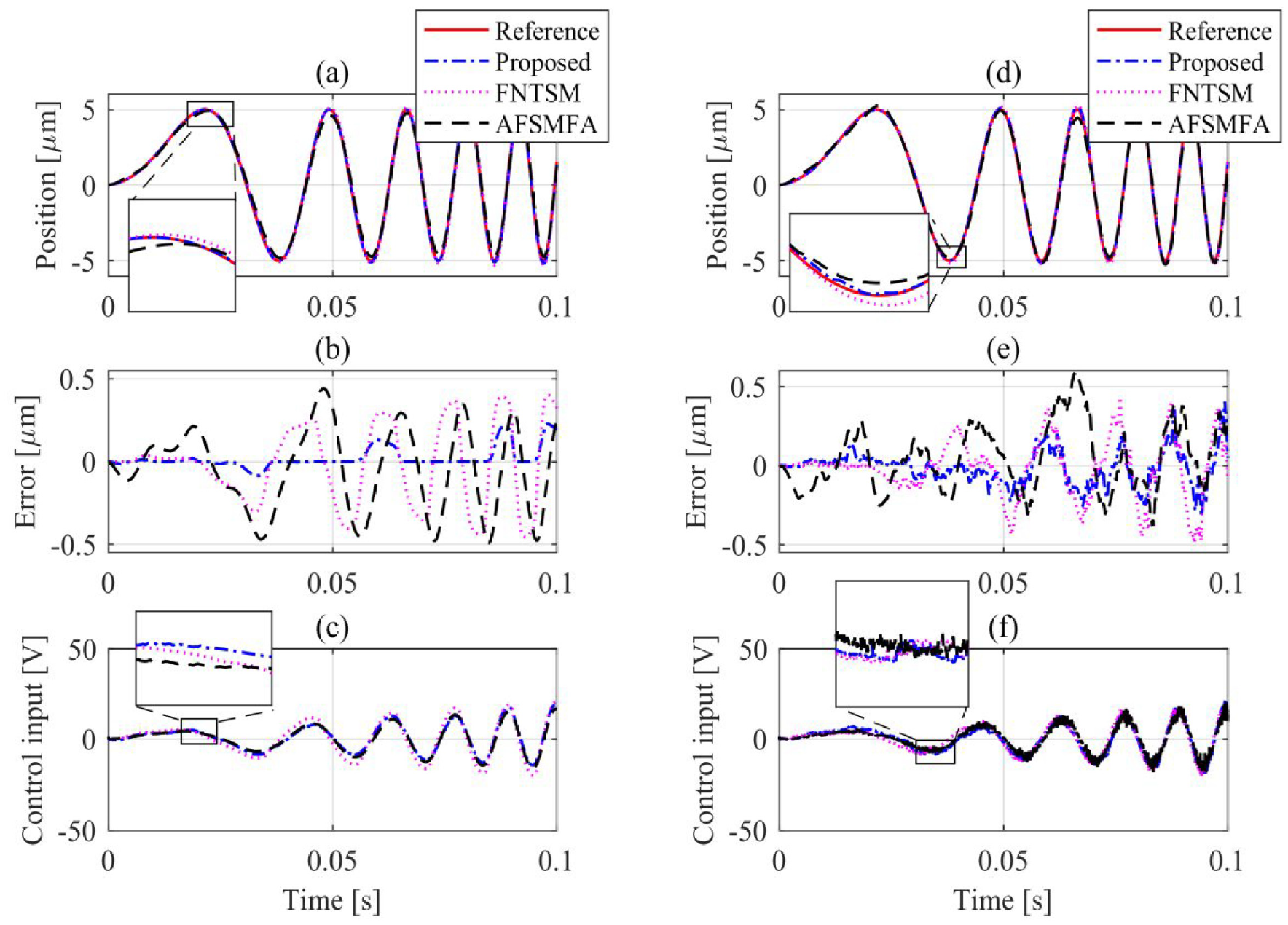
Swept-frequency trajectory tracking results: (a–c) without uncertainties, (d–f) with uncertainties.
Anti-disturbance test
Finally, to test the fast convergence and robustness performance of the proposed controller, an impulse-type disturbance with an interval of 2 ms and an amplitude of 30 N is applied to the PMS (58)−(59), and the initial simulation conditions are the same as those described in Section 4.1. The final results are shown in Figure 5. It can be clearly seen that the proposed controller requires the shortest settling time of 4 ms, and the tracking error can converge to
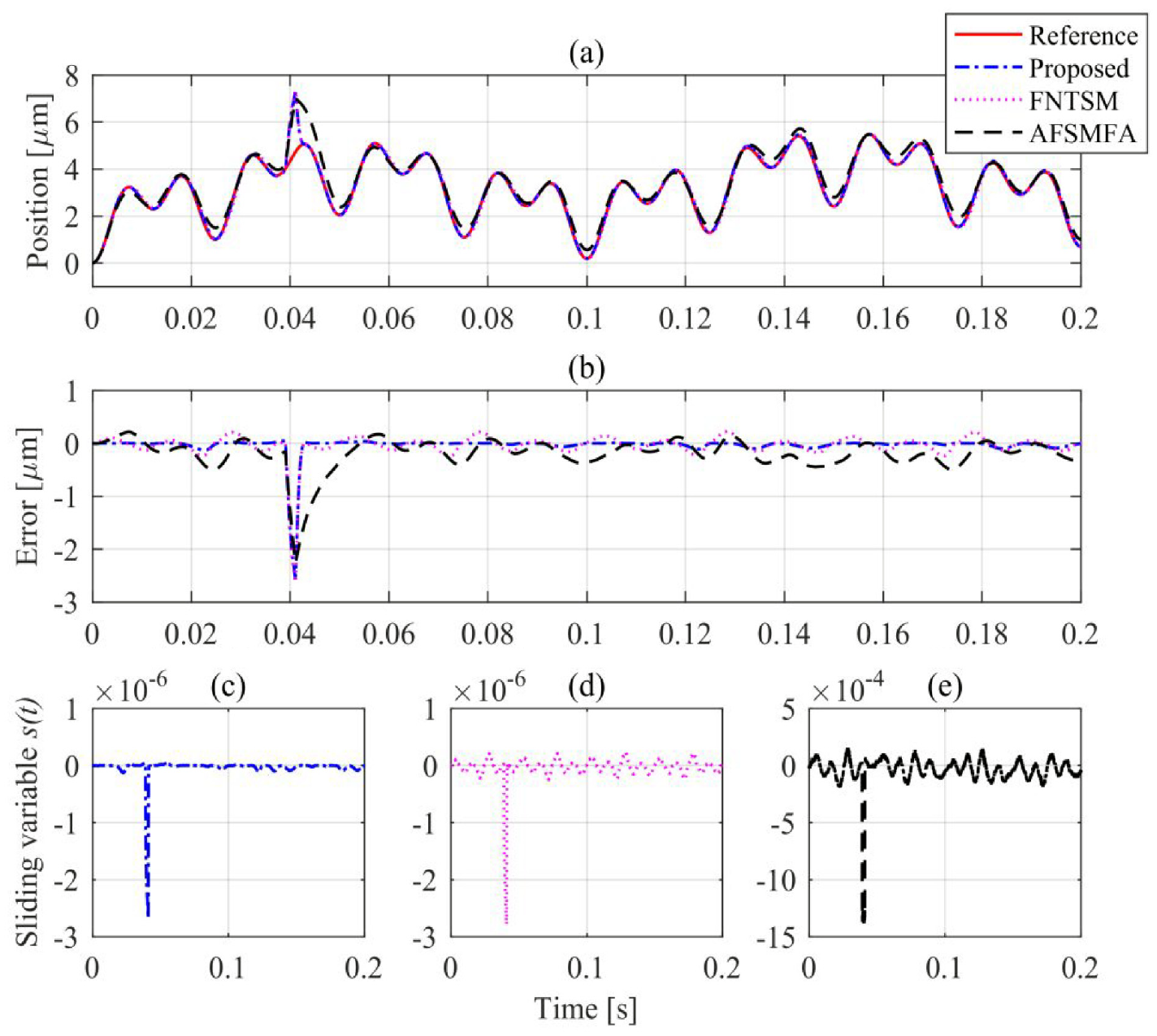
Tracking responses of external shock disturbance: (a) position responses, (b) error responses, (c–e) sliding variable responses.
Discussions
According to the previous simulation results, the maximum (max) and root-mean-square (RMS) tracking errors of the three controllers are drawn in Figure 6 for intuitive comparison. It can be seen that the proposed controller can achieve the minimum
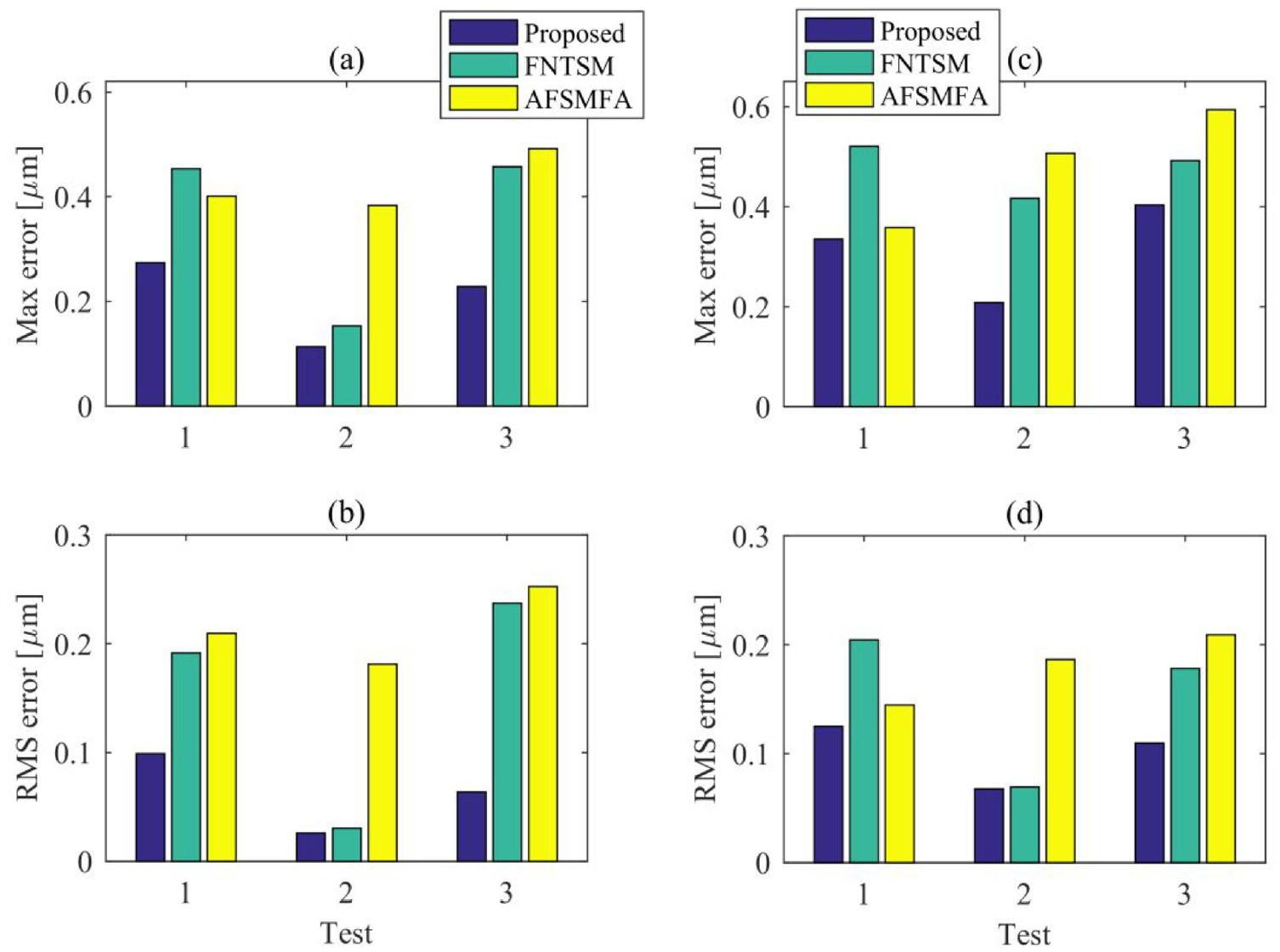
Comparisons of the max and RMS errors: (a and b) without uncertainties, (c and d) with uncertainties.
Although the advantages of the proposed controller are obvious over the AFSMFA and FNTSM controllers, it should be noted that the tracking performance of the designed controller is still limited by three aspects: on the one hand, the choice of terms of Fourier series needs to balance computational cost and estimation accuracy, so as to achieve better real-time control; on the other hand, the design of fuzzy rules and membership functions depends on the experience of the designer; finally, the choice of control gains requires a trade-off between control chattering and tracking error. For the first two aspects, there is no universal method at present, and the parameters with the optimal performance can only be found through trial-and-error way. For the third aspect, although the proposed control method is chattering free in nature, it still has slight chattering phenomenon for high-speed and serious time-varying uncertainties. One reason may be that it is difficult to balance chattering and tracking error at the same time. Thus, multi-objective optimization algorithms 37 can be considered to adjust the control gains to obtain better tracking performance.
Conclusions
In this paper, a robust controller composed of FNTSM controller, function estimator and fuzzy compensator was proposed for PMSs with the nonlinear and time-varying uncertainties. Based on Lyaplov stability principle, the adaptive laws of Fourier coefficients and fuzzy adjusting parameters were designed, and the online estimation and compensation of time-varying uncertainties of the system were realized. The proposed controller not only ensured that the tracking error converged to zero in finite time, but also did not require the boundary information of system uncertainties. In addition, the proposed controller was continuous without singularity in nature, leading to chattering free. In the simulations, three typical signals were selected as reference trajectories to test the tracking performance. Compared with the AFSMFA and FNTSM controllers, the proposed controller can achieve the best tracking performance regardless of whether the system has time-varying uncertainties or not. In the future work, the experiments will be conducted to further verify the effectiveness and superiority of the proposed control.
Footnotes
Acknowledgements
And the authors are grateful as well to the anonymous reviewers who improved the quality of the investigation.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Key Project of Natural Science Research Project of Anhui Universities (Grant no. KJ2021A0418&KJ2020A0288). we would like to thank Anhui University of Science and Technology Research Start-up Fund for High-level Talents Introduction(13200391).