
Abstract
In this paper, a novel backstepping terminal super-twisting sliding mode (TSTSM) with high order sliding mode observer (HOSMO) is proposed to control the two degrees of freedom (DOFs) Serial Elastic Actuator (SEA), inspired by a lower limb of humanoid robots. First, the dynamic model, extended from our previous study, is presented for developing the control algorithm. Secondly, the backstepping technique is utilized to separate the overall system into two subsystems. One of the challenges of SEA is to deal with the evident oscillations caused by the elastic element, which might lead to the degrading performance of load position control. In order to reduce this adverse effect, a TSTSM is proposed to control the position tracking of two subsystems. The advantages of TSTSM are the finite-time convergence despite the bounded perturbation and the dramatic reduction of the chattering phenomenon. To construct and implement the TSTSM controller, it requires the knowledge of all states, which is not available in the current lower limb system setup. Therefore, a HOSMO is utilized to estimate the unknown states. Finally, experiment results are carried out to assess the effectiveness of the proposed controller and compare it with those of different control schemes.
Keywords
Introduction
Ever since the past, the art of replicating artificial human body parts has been developed for various purposes: physiology research, missing body parts for human replacement, humanoid robot manufacture, and many more. As the technology and health-care system advance, the demand for more biologically accurate artificial limbs for prosthetic and humanoid robots is growing extremely fast. One of the most critical aspects of making artificial limbs is to mimic the soft, flexible characteristics of a human’s joint. Even though numerous choices of actuators are available such as electric motors, hydraulic actuators, and pneumatic actuators, the stiffness property of the actuators prevents these actuators from imitating the human joint in reducing the contact force. One of the solutions to address this drawback is to incorporate an elastic element into the mechanism, see Refs.1–5 and the references therein. The combination of an elastic element with a stiff actuator is also known as the compliant actuator design. An alternative approach is to utilize an impedance control scheme to reduce the impact of the external forces, as proposed in some research about humanoid robots and manipulators.6–9 Among those solutions, the Serial Elastic Actuator (SEA) design that was initially proposed by Pratt and Williamson 10 has gained much attention in the robotics field over the year.11–16 This innovative design enables the actuator to be more flexible in humanoid robot applications since it replicates the elastic tendon in the human body. By utilizing the SEA design, many humanoid robots and bio-inspired robots have successfully demonstrated their smooth motion capabilities.17–23 Nevertheless, the development of SEA still remains a considerable challenge.
Traditionally, a simple control scheme such as PID is implemented to control the SEA system.24–26 However, the stability of the PID control scheme might be degraded due to the large amplitude of friction and backlash. This problem can be alleviated by utilizing the feedback of positions and velocities.27–31 To further enhance the robustness, disturbance observer (DOB) is employed in many research.32–34 Since the SEA is a nonlinear system, the sliding mode control (SMC) is a suitable control scheme because of its robustness and simple design.35,36 Despite the asymptotic stability in the traditional SMC, it is well-known that as the system dynamic gets closer to equilibrium, the rate of convergence becomes slower, which means the states of the system may never reach equilibrium in finite-time. To solve the aforementioned problem, terminal sliding mode control (TSMC) was first proposed in 1992. 37 The controller was based on the concept of a terminal attractor introduced in the study of neural networks. 38 From then on, it has been utilized significantly in various literature39–42 and even in SEA applications. 43
In our previous study,
44
an event-trigger sliding mode control was proposed for two DOFs humanoid robot’s lower limbs consisting of two SEA links connected in series. The experimental results have demonstrated that the elastic element induces evident oscillation. The adverse oscillation of the primary SEA joint affects the position adjustment of the secondary SEA joint and vice versa. Consequently, the lumped oscillation of the two SEA links eventually leads to the control system’s instability. Moreover, the utilization of the sign function for the SMC gave rise to the chattering phenomenon. As a result, this phenomenon triggers the lumped oscillation caused by the two SEA links, which can cause severe instability. Therefore, a different control scheme based on the sliding mode is required to attenuate the chattering phenomenon and provide finite-time convergence. So far, many methodologies have been proposed in the literature to reduce the chattering phenomenon. One of the traditional solutions is to replace the discontinuous sign function with the saturation and sigmoid function,45–47 which is known as the boundary layer method. However, the control system may lose robustness to the disturbances as the sliding trajectories are constrained to the vicinity.
48
Another drawback is that it also increases the tracking errors in the steady-state.
49
Another alternative method, such as the disturbance estimation method, can be implemented to reduce the chattering phenomenon. For instance, Shtessel et al.
50
developed a control scheme with an asymptotic disturbance observer to achieve continuous control input. In Kuang et al.,
51
Du et al.
52
an equivalent control based on non-smooth control without using any switching term is chosen to control the discrete-time system. This control scheme demonstrated that it is able to alleviate the chattering problem. Recently, one of the most important approaches in SMC is to utilize the super-twisting algorithm (STA).53–59 The ability to generate a continuous control signal is one of the prominent features of STA, thus reducing the overall chattering phenomenon. The STA is also a powerful tool in providing finite-time convergence to the origin of the sliding variables
Since the implementation of the STA requires the knowledge of all states, whereas our current humanoid robot’s lower-limb system only provides information regarding the position, it is crucial to obtain the other states through an observer. Real-time differentiators (observers) have played a vital role in many output feedback control designs,60,61 such as the backward Euler method and spline interpolation technique.62,63 Among those, a high-gain observer is probably the most well-known approach to obtain the unknown states because of its simplicity and capability.64,65 Although the advantages of the high-gain observer are obvious, it is also sensitive to small high-frequency noises and has a drawback called the peaking effect: as the gains rise to infinity, the maximal output value during the transient also grows infinitely. 66 To deal with the bounded uncertainties, a type of observer which is based on sliding mode (SMO) was introduced in Edwards and Spurgeon 67 and is widely used in further research because of its finite-time convergence.68–70 In recent years, a new generation of observers based on STA has been developed,66,71,72 which is actually a second-order case of the high-order observer. This type of observer inherits the properties of the STA, providing robustness and convergence in finite time in the presence of disturbance.73–75
The main objective of this paper is to propose the backstepping TSTSM to control the two DoFs SEA inspired by a lower limb of humanoid robots. The proposed controller can deal with the perturbation caused by the elastic elements while guaranteeing that the states will converge in finite time and offering chattering attenuation. A high-order sliding mode observer (HOSMO) is also utilized to provide the required full-states feedback.
This paper is organized as follows. Section 2 gives the dynamic model of the 2 DOFs SEA-inspired humanoid robot’s leg. Section 3 shows the design process of the backstepping TSTSM based on HOSMO for the two SEA links. Section 4 details the experimental setup and demonstrates the obtained experimental results. Finally, further analysis and discussion are given to clarify the experimental results.
System modeling
The SEA inspired by the lower limb system is taken from our previous study. 44 The dynamical modeling for the two SEA links in Figure 1 is given as follows:

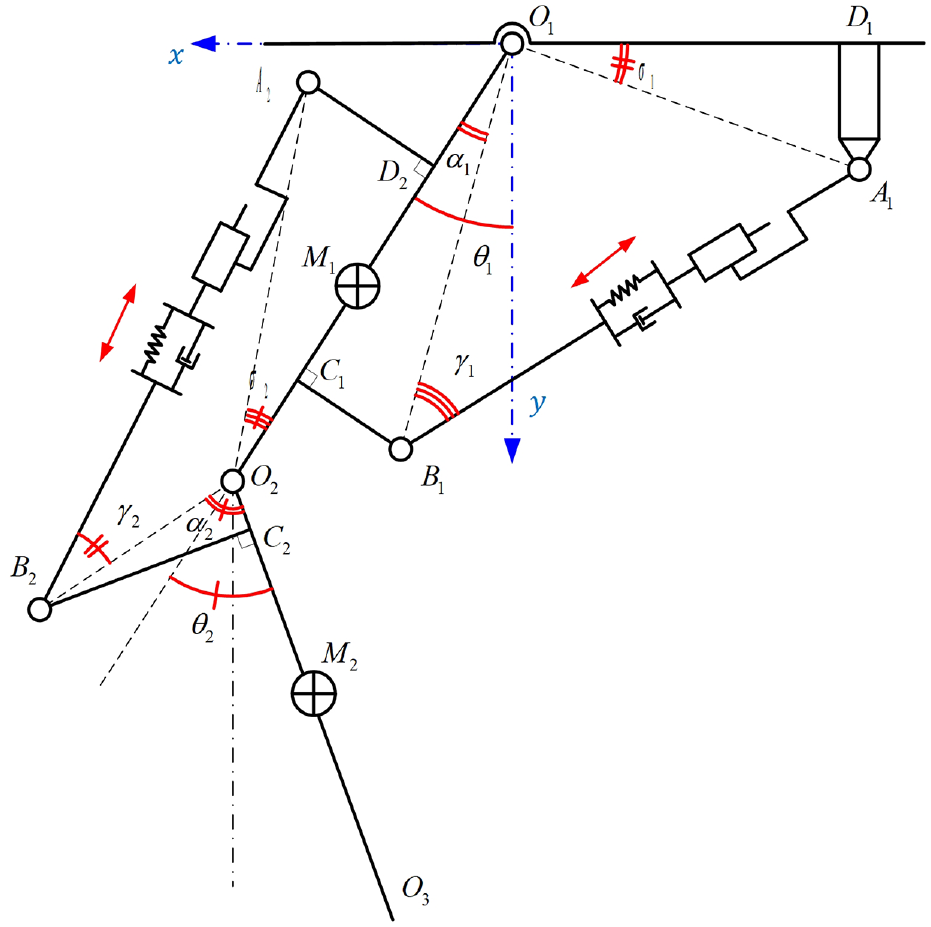
Kinematic diagram of humanoid robot’s lower limb.
where
In which
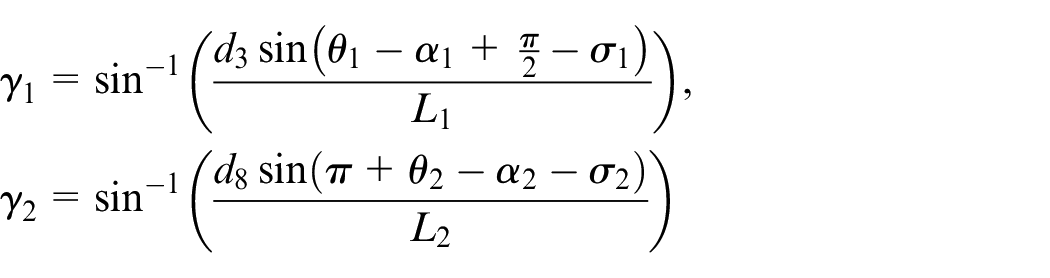
Varied angles
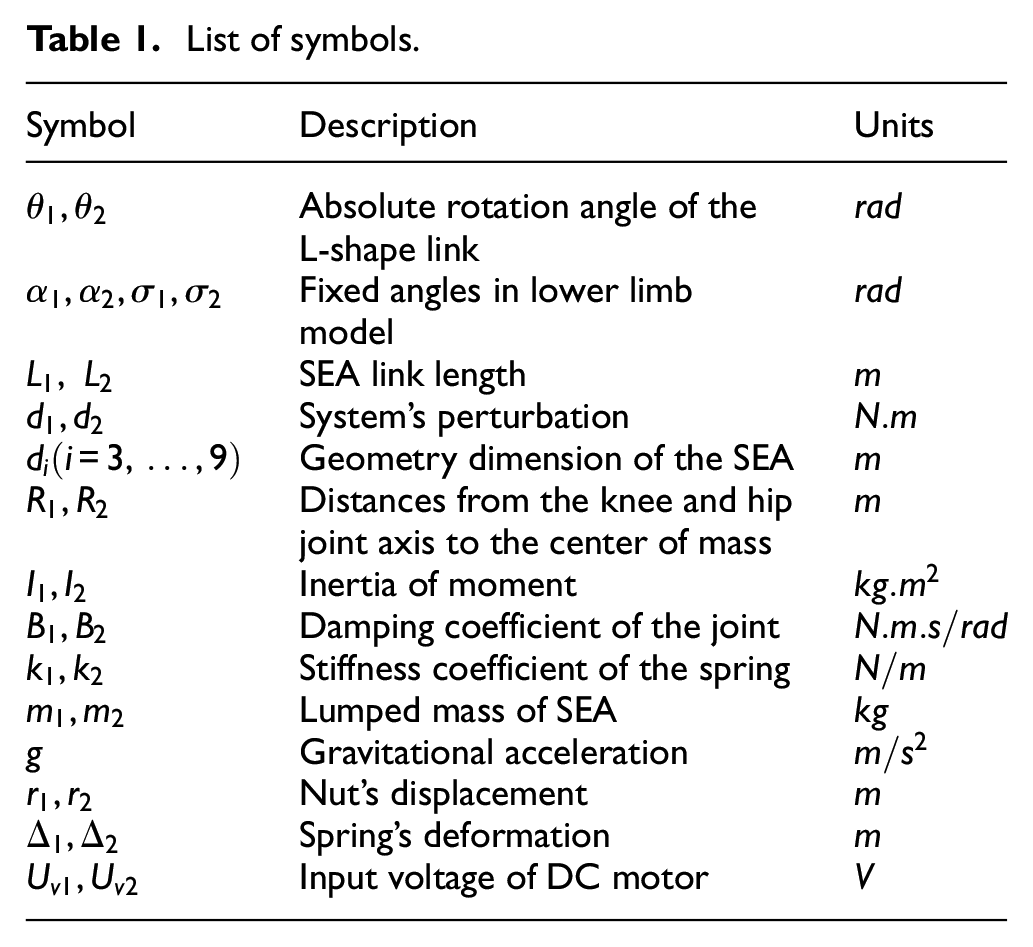
The explanation of all the above symbols is shown in Table 1.
List of symbols.
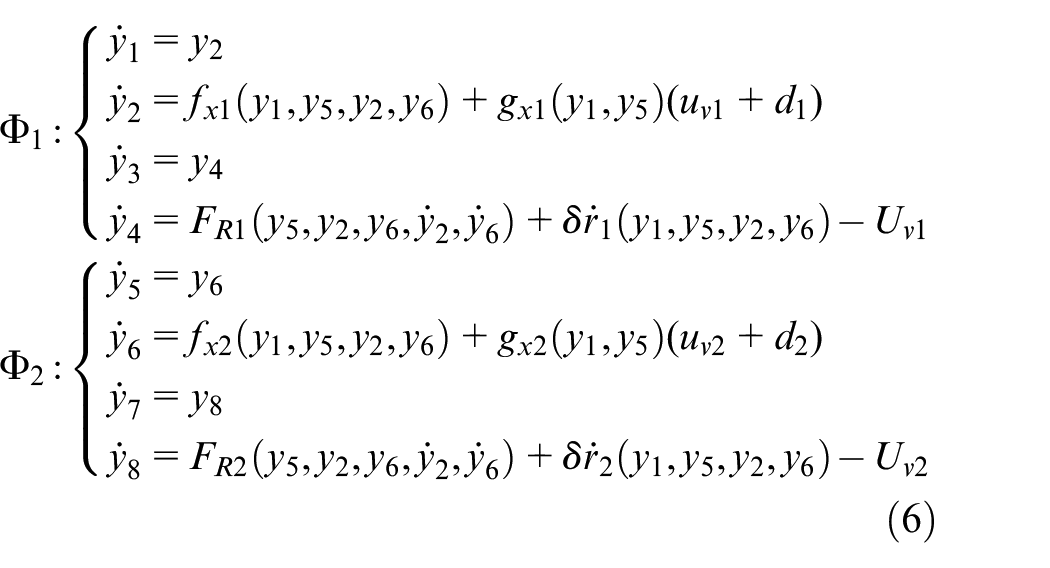
By defining


Backstepping terminal super-twisting SMC based on HOSMO
Backstepping process
Considering the system of equation (1), the motor voltage
Step 1: A virtual control input
Step 2: The difference between
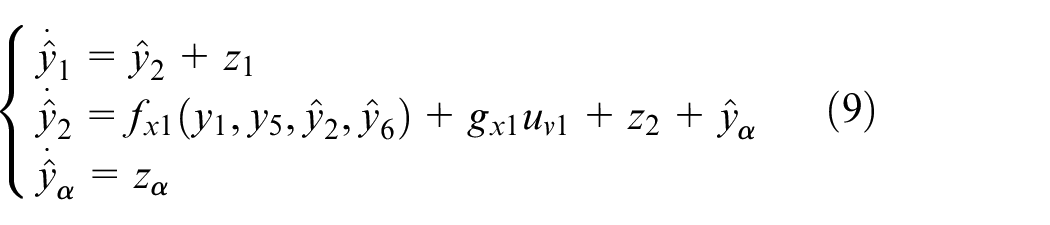
Super-twisting observer design
It can be seen from equations (4) and (5) that only the angle displacement
where
Consider the dynamic system for the hip joint of the femur SEA

The HOSMO dynamic systems to estimate
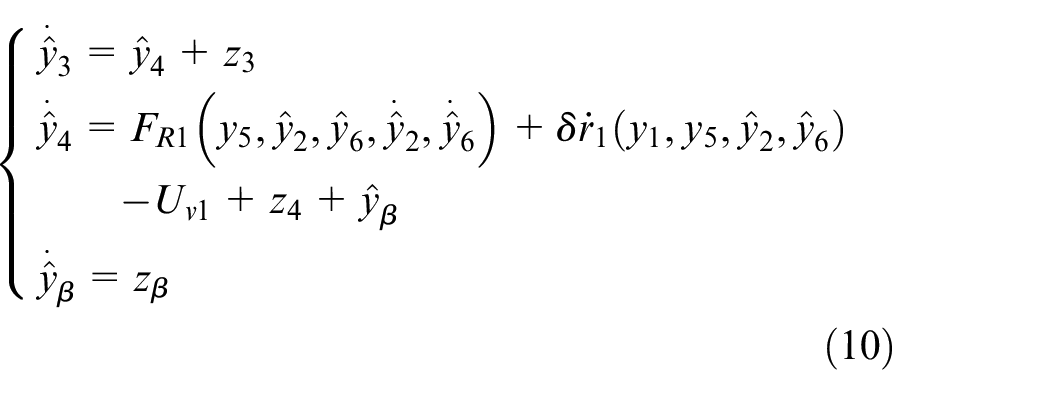
where
Let us define the error variables as follows:

The correction terms are chosen in the same manner given in the literature 75 :
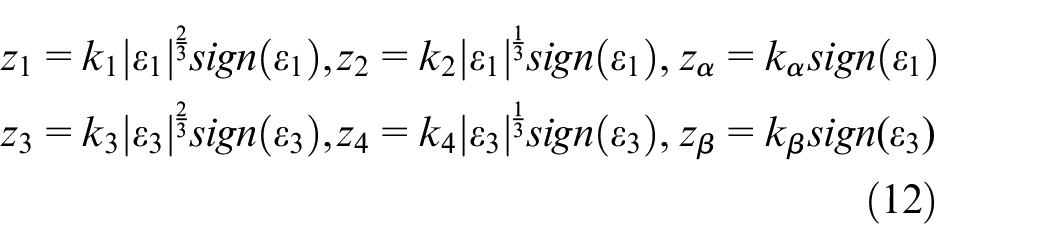
where
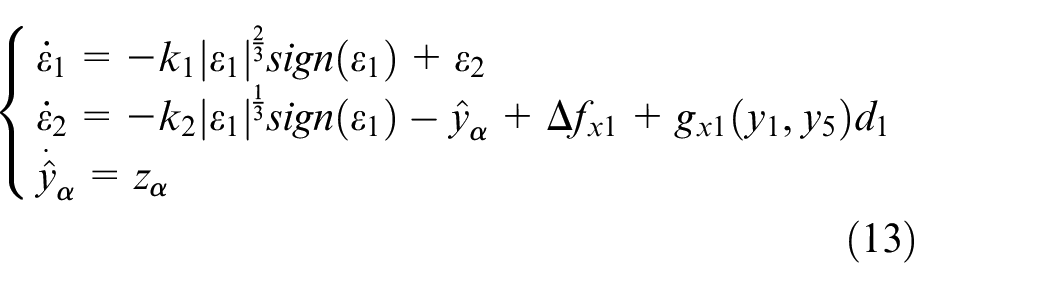
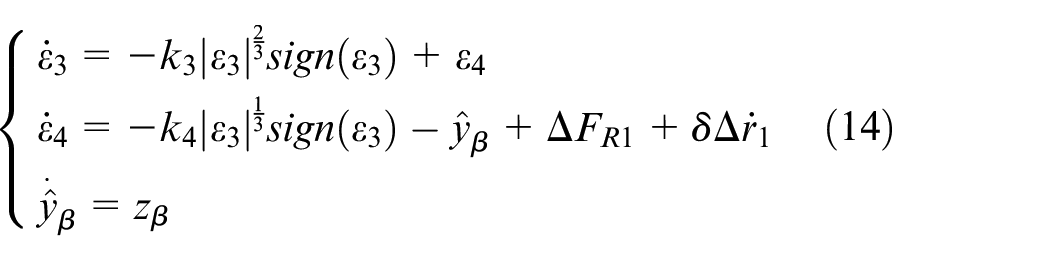
Then, the HOSMO error dynamics for the two subsystems can be written as:
where
where

Let us define
The STO error dynamics in equations (13) and (14) can be further rewritten as:
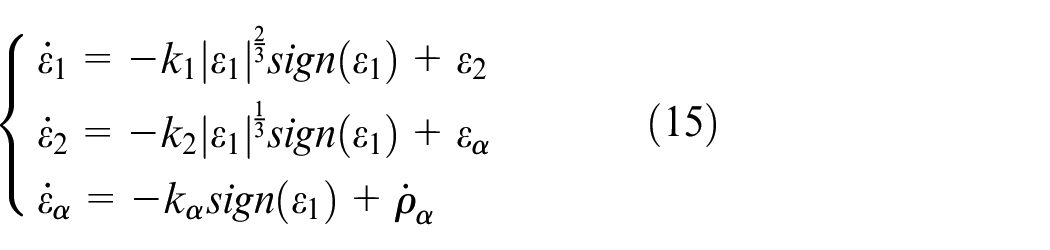
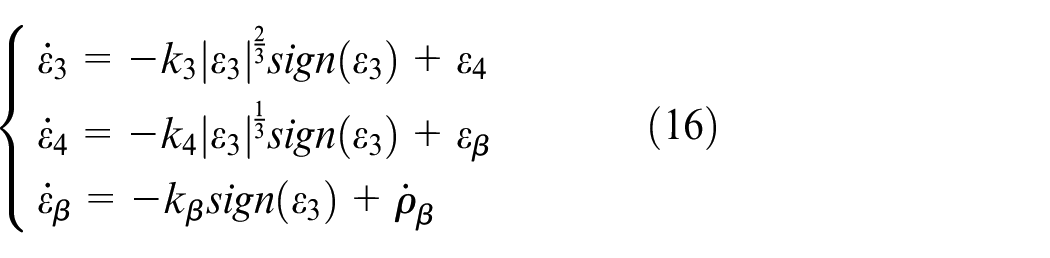
Equations (15) and (16) are proven to be finite-time stable under Assumption 1 in literature76,77 by choosing appropriate gains
Terminal super-twisting sliding mode controller
Let us define the error variable

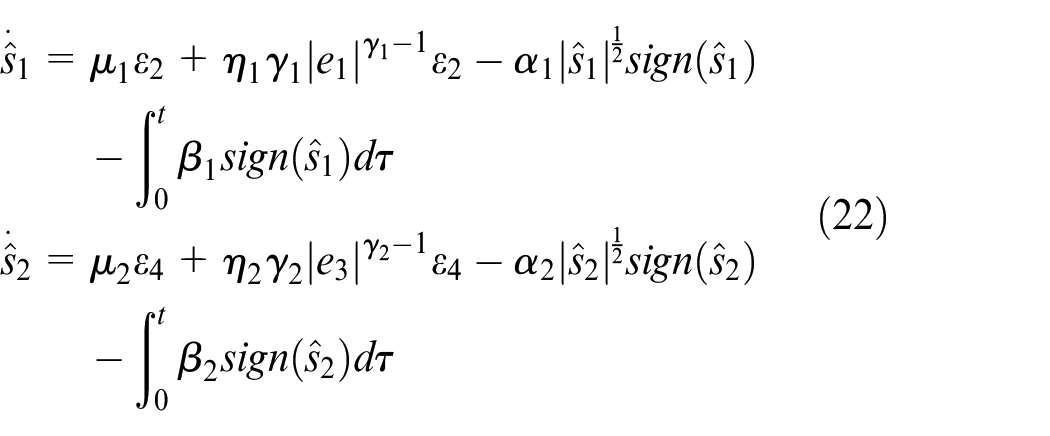
Taking the first time-derivative of equation (17) and using equation (7), equations (9–11), it yields:
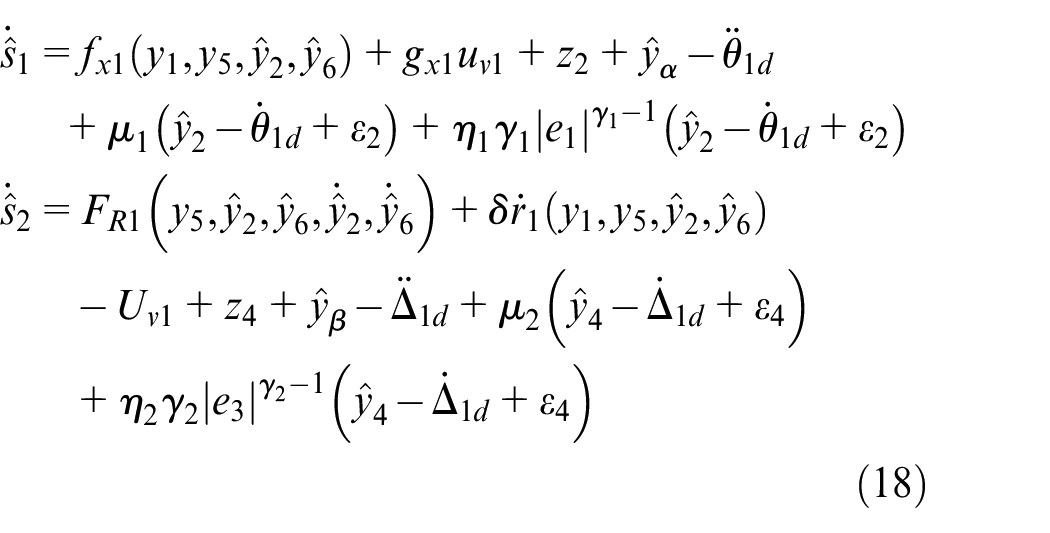

in which

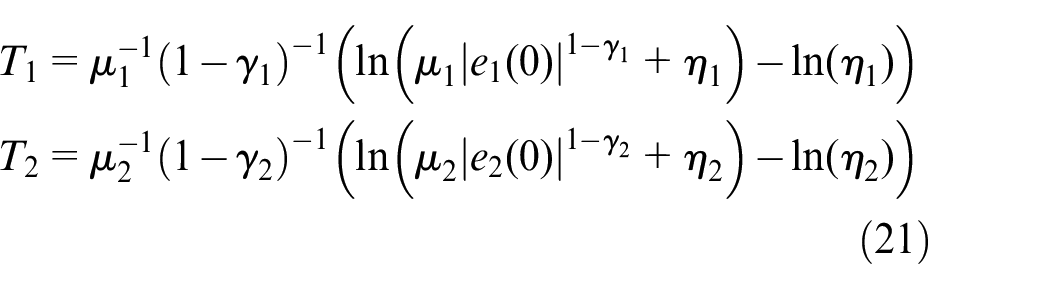
The convergence time is given as the procedure given in the literature 78 :
Proof of Theorem 1. Substituting the control inputs of equation (19) into equation (18), it yields:
Combining equations (15)–(18), the dynamic of the hip joint of the femur SEA can be deduced as follows:
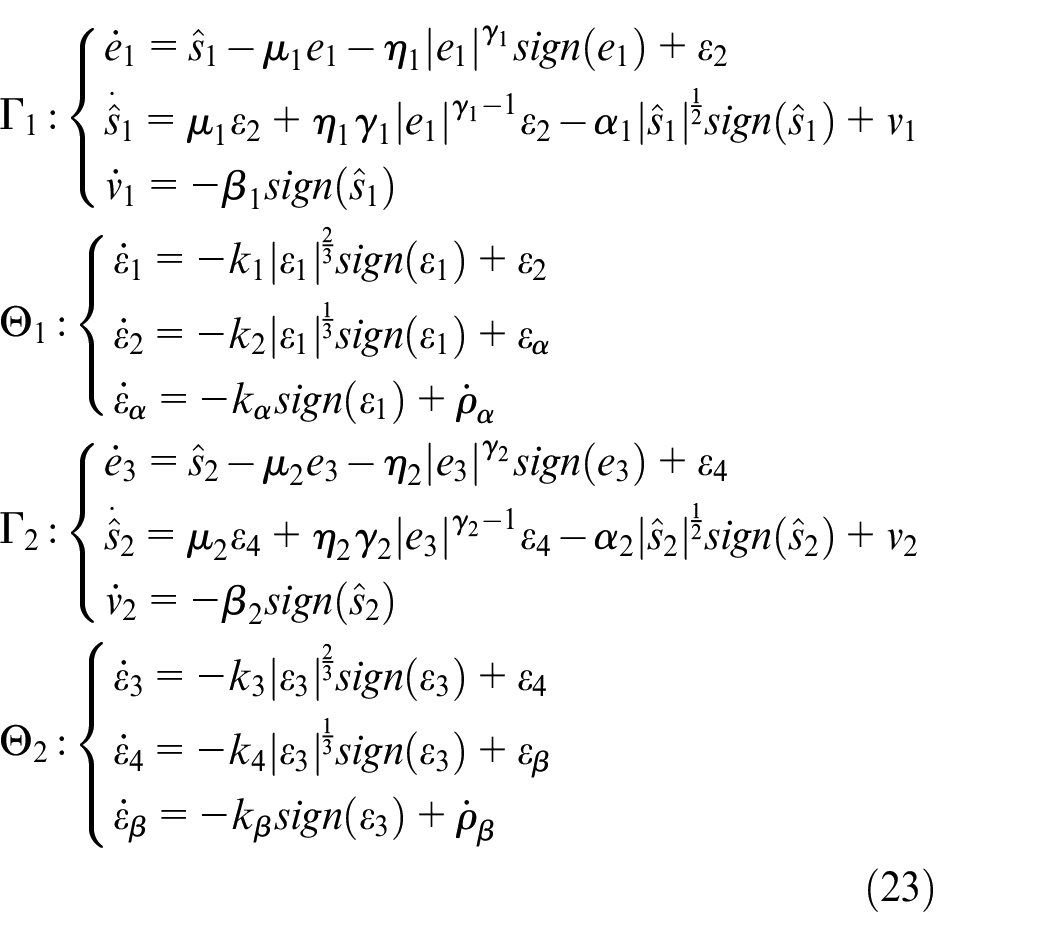
The error dynamics
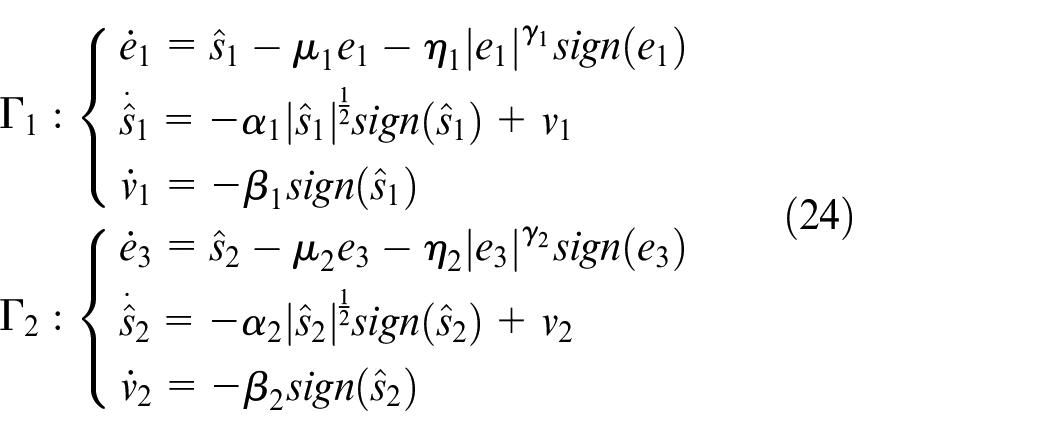
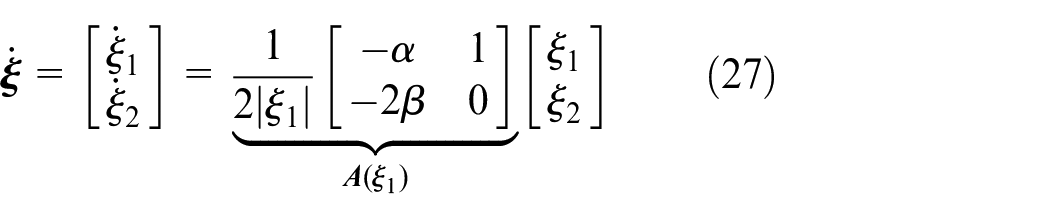
In the second step of the proof, a stability analysis of equation (24) is performed. Let us consider a generalized system:

To analyze the stability of equation (25), a candidate Lyapunov function candidate is chosen as80,81:

where
Notice that
By taking the first-order derivative of the Lyapunov function candidate, it can be obtained as follows:
where

To guarantee that
Recall the standard inequality for quadratic forms:


where
By utilizing equation (32), equation (28) becomes:
Equation (31) gives us the fact that


From equation (34), it can be concluded that the trajectory of

This implies that both the errors
The block diagram for the whole controller is shown in Figures 2 and 3.
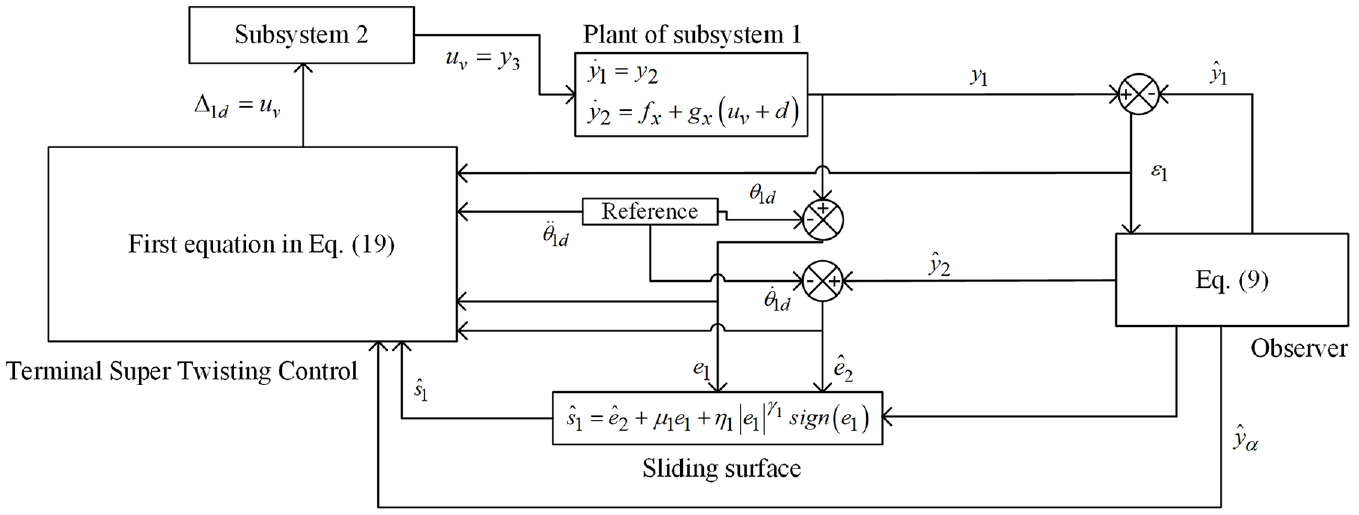
Block diagram for implementation of TSTSM with HOSMO on SEA system (subsystem 1).
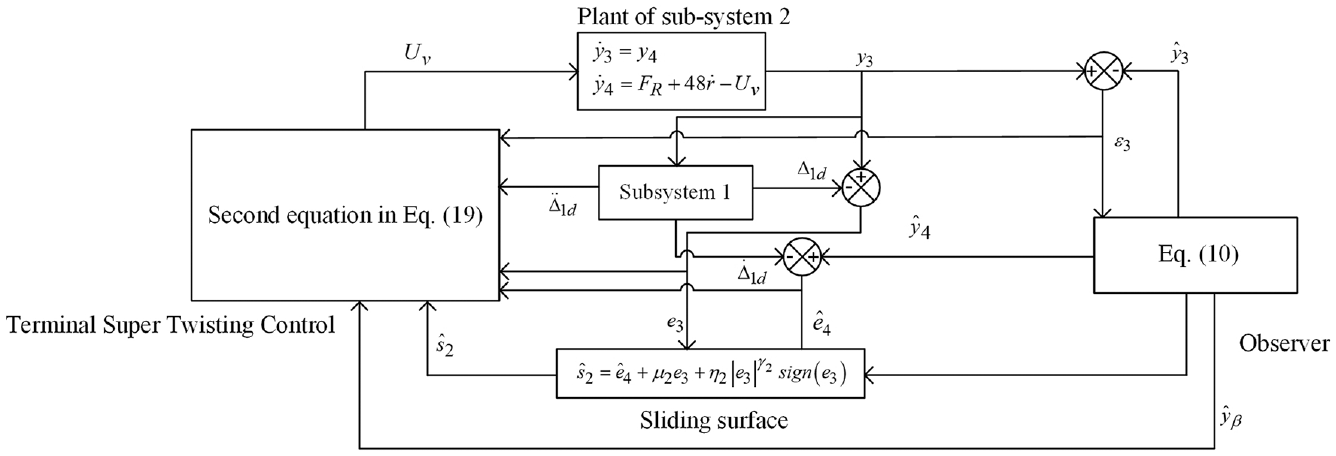
Block diagram for implementation of TSTSM with HOSMO on SEA system (subsystem 2).
Experimental setup and results
The experimental setup is utilized to validate the proposed controller, as shown in Figure 4. Two SEA links assist the hip joint and knee joint. The SEA mechanism is powered by a DC motor. The rotational motion of the motor shaft is transmitted through a gear drive to establish the prismatic motion of the SEA. This motion, in turn, is transformed into rotational motion in the joints. To measure the angular position of the two joints, linear membrane potentiometers are installed to measure the linear position of the SEA, which is then calculated into angular position by trigonometric constraint of the SEA mechanism. Additionally, another potentiometer is installed onto the nut to measure the deformation of the elastic element – the spring, which is shown in Figure 5.
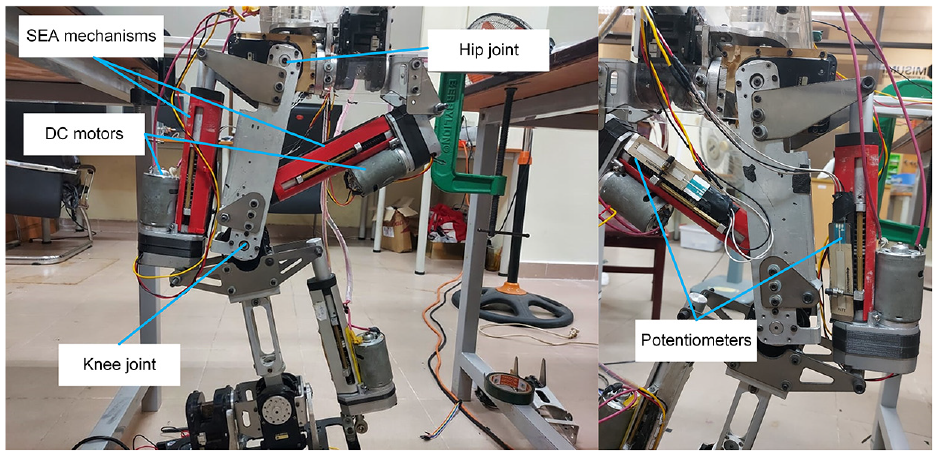
SEA-inspired humanoid robot’s leg.
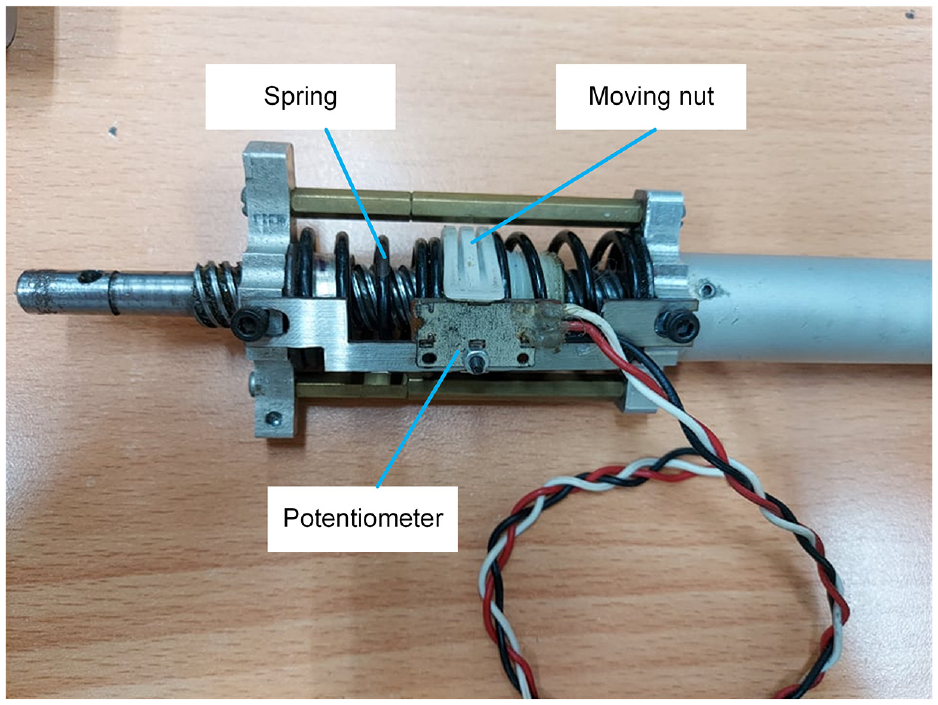
Detail of the SEA.
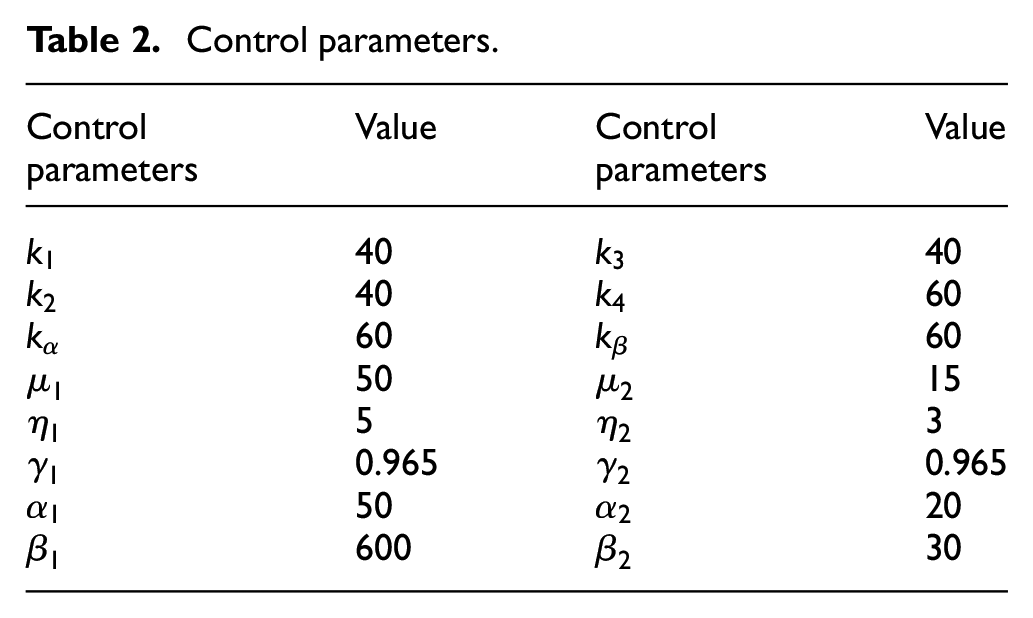
First, the desired trajectories are defined as step functions to demonstrate the performance of the controller with
Control parameters.
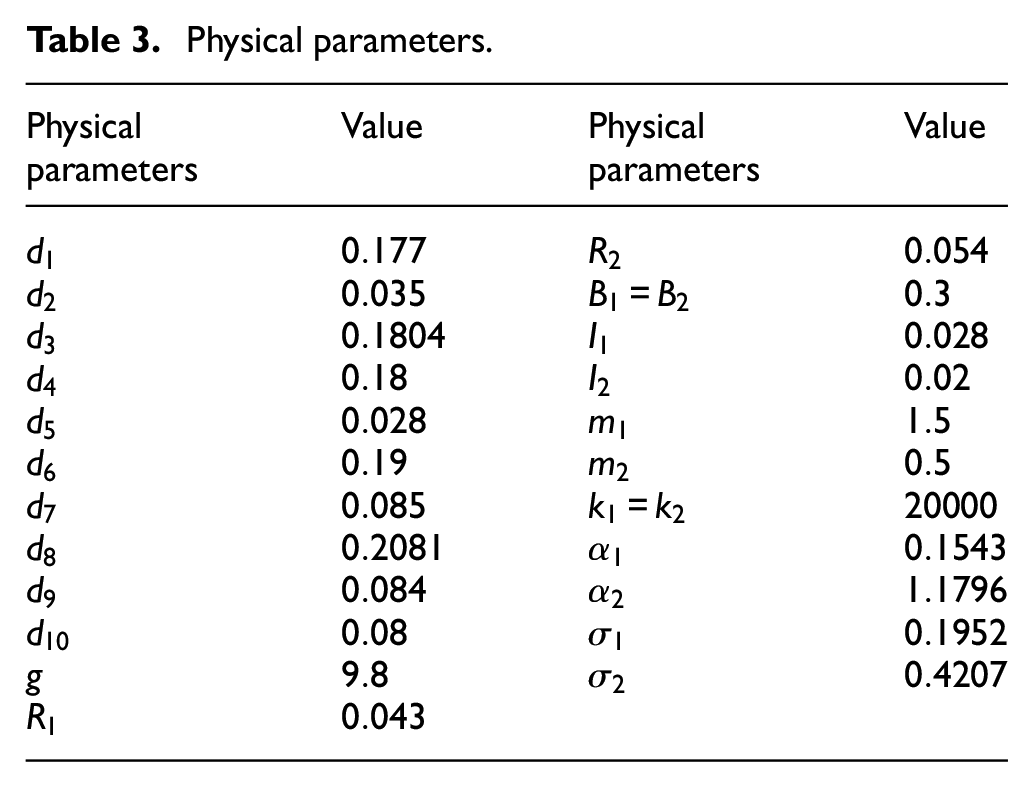
Physical parameters.
The position tracking of the step trajectory is shown in Figure 6. The actual angular positions of the joints are represented by the solid blue line while the red dotted line represents the reference trajectories. It can be seen that both of the joints converged to the reference trajectories. However, because of the oscillation nature of the springs in both joints, the combined oscillation makes the fluctuation in
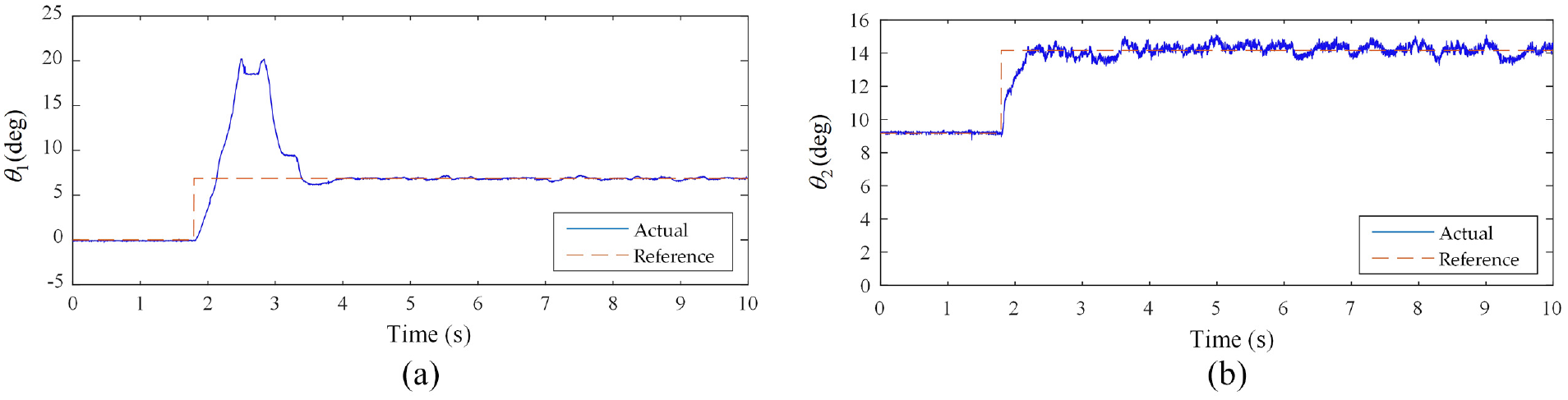
Position tracking of the hip and knee joints (step trajectory): (a) tracking of the hip joint and (b) tracking of the knee joint.
Evolution of the sliding surfaces (step trajectory): (a) sliding surface value of the first subsystem of the hip joint and (b) sliding surface value of the first subsystem of the knee joint.
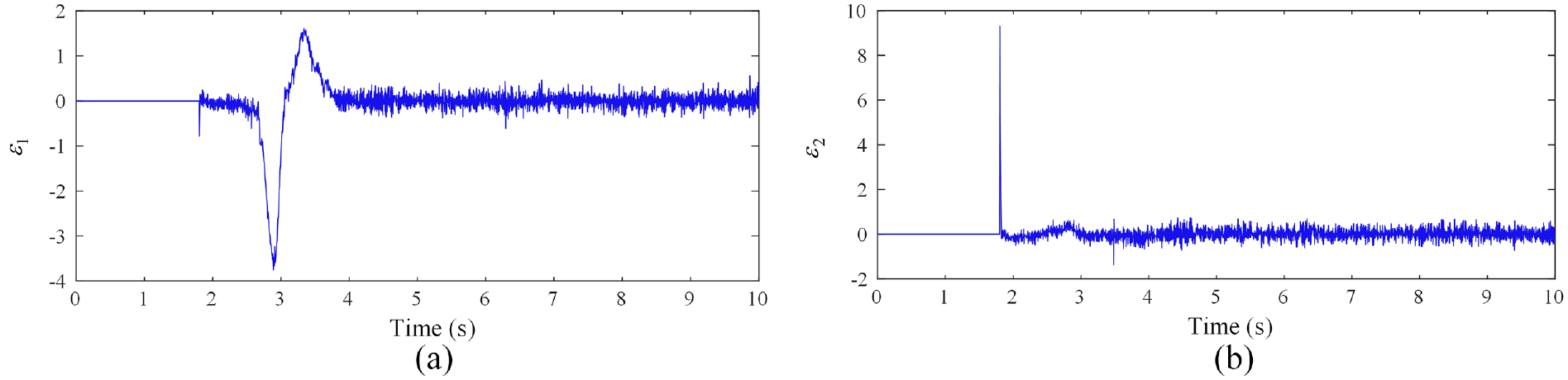
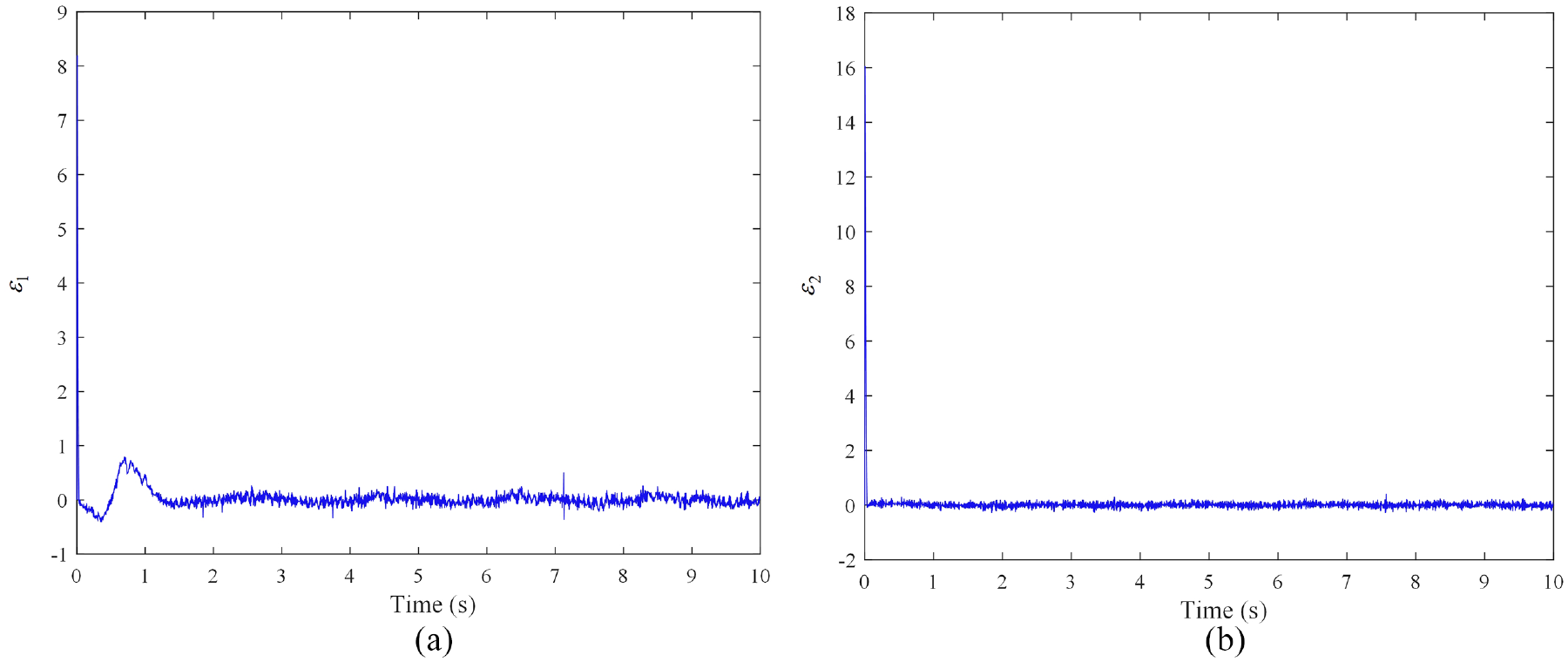
Evolution of HOSMO error (step trajectory): (a) estimation error of the hip joint’s angle and (b) estimation error of the knee joint’s angle.
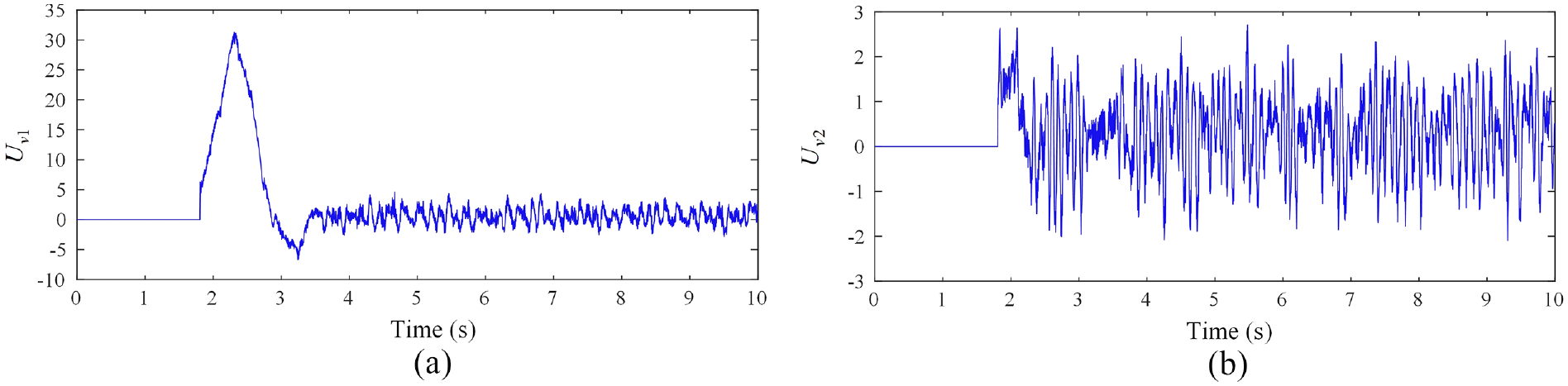
Voltage inputs for the control system (step trajectory): (a) control input for the hip joint and (b) control input for the knee joint.
To quantitatively evaluate the effectiveness of the proposed controller, we conduct two other different control schemes, traditional SMC and TSMC. The desired trajectories are defined as
The experimental results comparison of SMC, TSMC, and the proposed controller are illustrated in Figure 10. The solid blue line represents the actual angular position of the joints, and the red dotted line represents the reference trajectories. The desired trajectory of the hip joint is easily achieved by all three control schemes, as shown in Figure 10(a) to (c). Despite the initial overshoot, the TSTSM successfully alleviated the chattering phenomenon, producing a smoother trajectory compared to the other two control schemes. From the observation, one can see that the tracking of the knee joint is much more difficult to achieve, as shown in Figure 10(d) to (f). As seen in Figure 10(d) and (e), the trajectory of the knee joint suffered significantly from the combined perturbation (the chattering phenomenon and the vibration of the springs), resulting in chattered outputs.
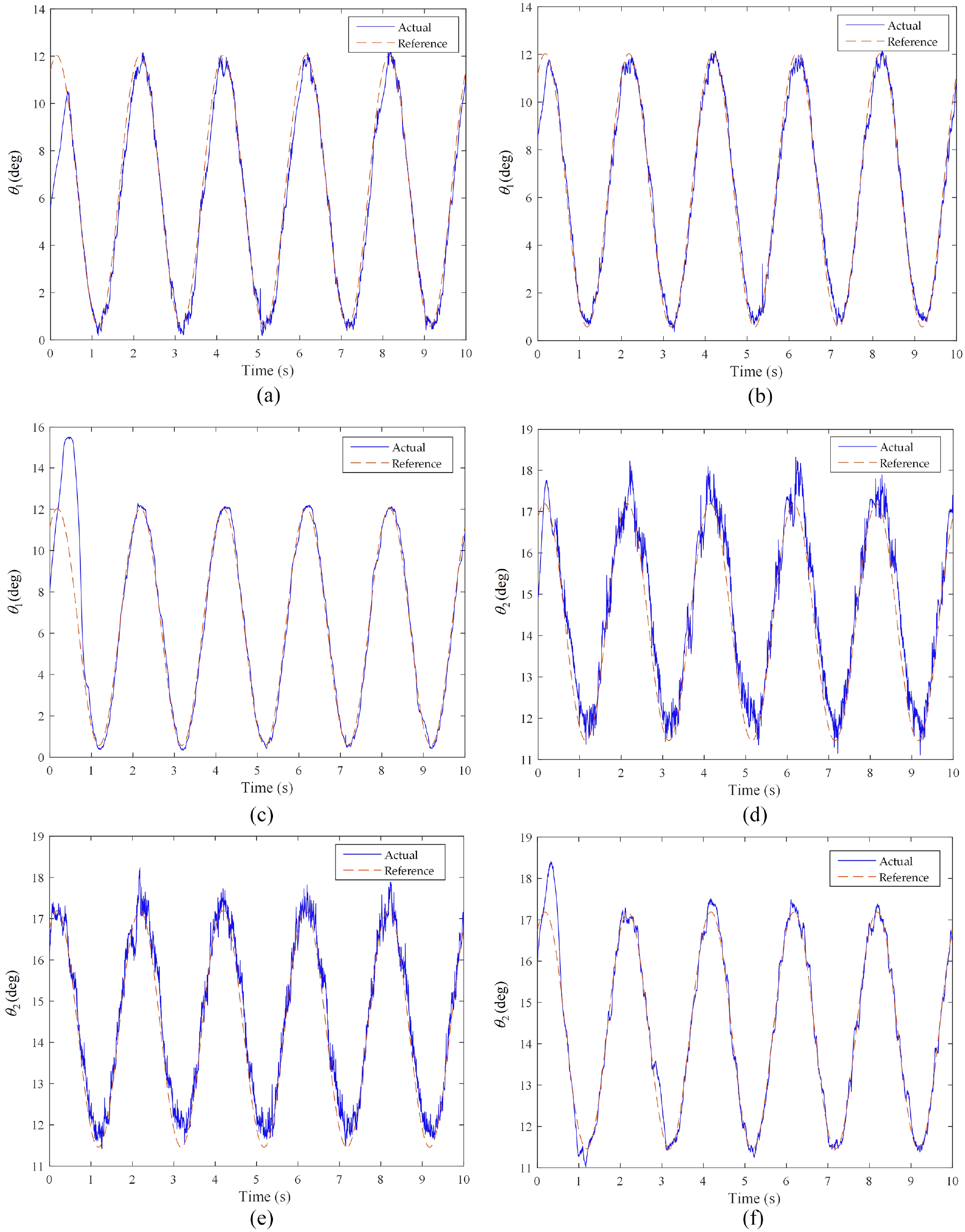
Position tracking results of three control schemes: (a) tracking of the hip joint under traditional SMC. (b) Tracking of the hip joint under terminal SMC. (c) Tracking of the hip joint under TSTSM. (d) Tracking of the knee joint under traditional SMC. (e) Tracking of the knee joint under terminal SMC. (f) Tracking of the knee joint under TSTSM.
On the other hand, Figure 10(f) shows that the effect of the combined perturbation is reduced dramatically, thus providing the trajectory smoother. The sliding surfaces and the error of HOSMO are shown in Figures 11 to 13, respectively. The error of the HOSMO converges to zero, as shown in Figure 8. The final control input still suffers from slight chattering, as shown in Figure 14.
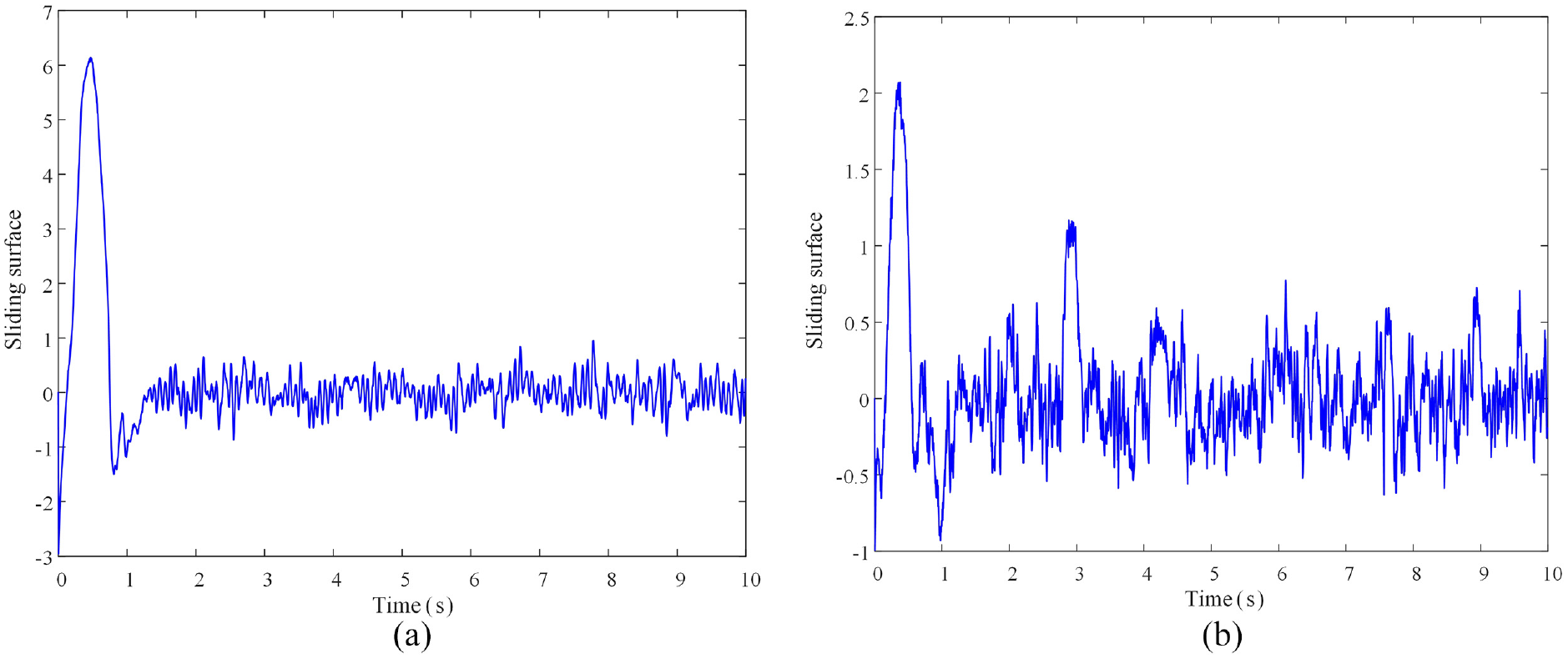
Evolution of the sliding surfaces (sine trajectory): (a) sliding surface value of the first subsystem of the hip joint and (b) Sliding surface value of the first subsystem of the knee joint.
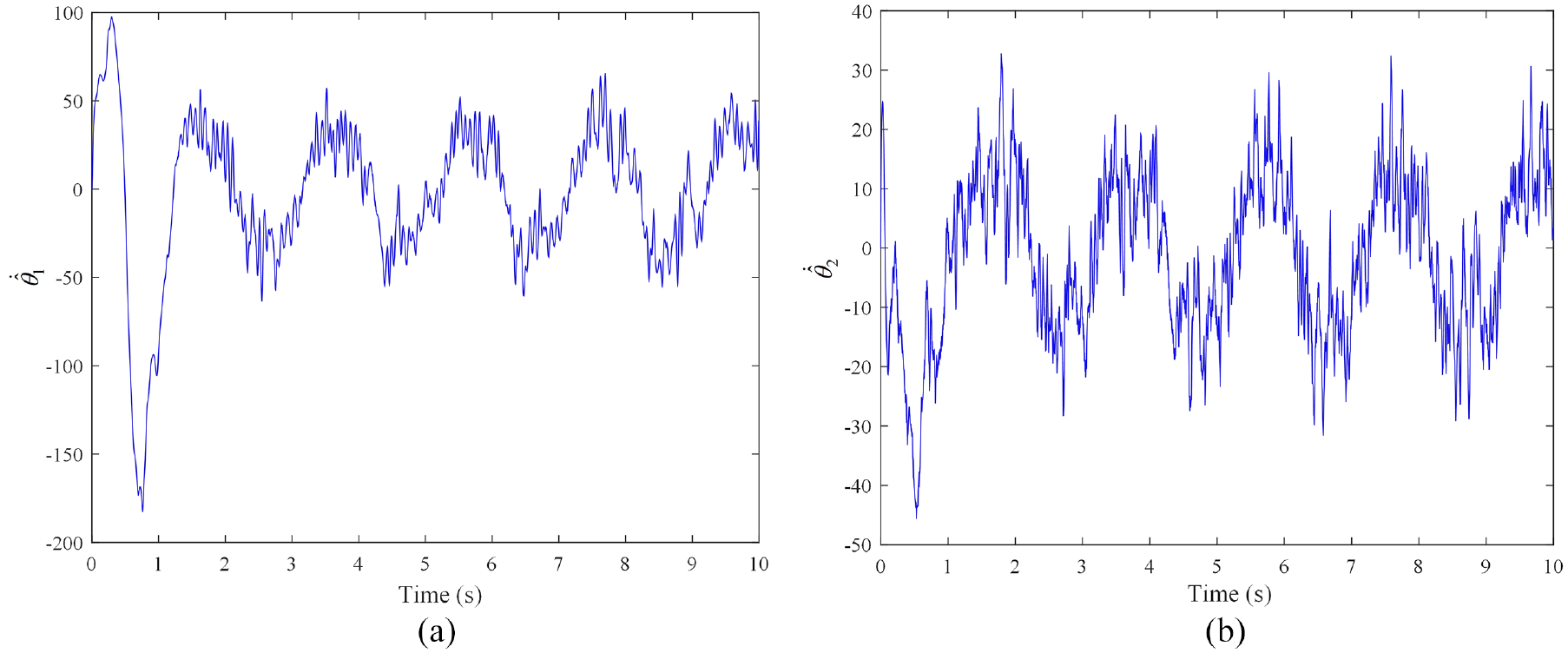
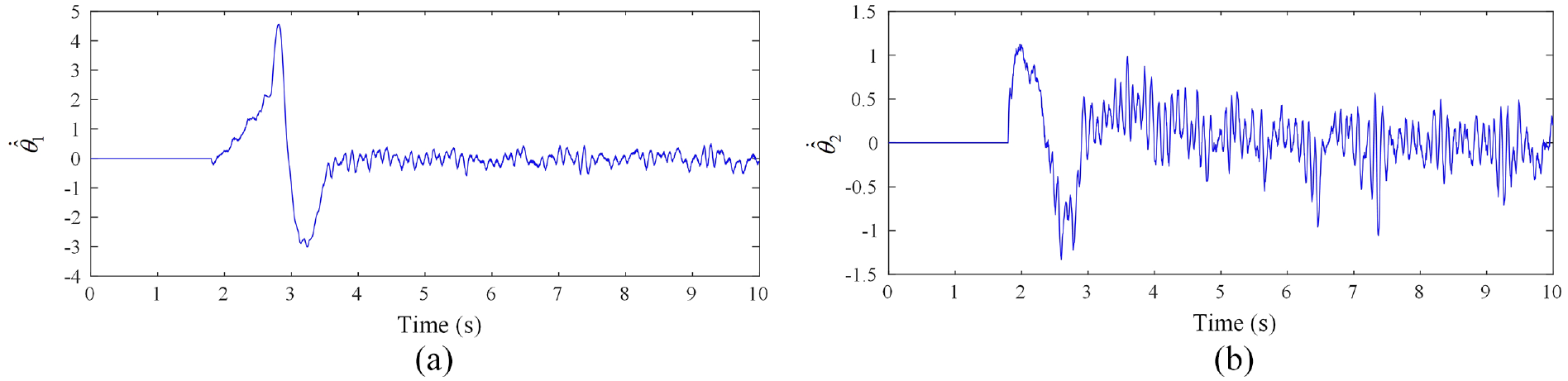
Evolution of the estimated state (sine trajectory): (a) estimated value of the angular velocity of the hip joint and (b) estimated value of the angular velocity of the knee joint.
Evolution of HOSMO error (sine trajectory): (a) estimation error of the hip joint s angle. and (b) estimation error of the knee joint’s angle.
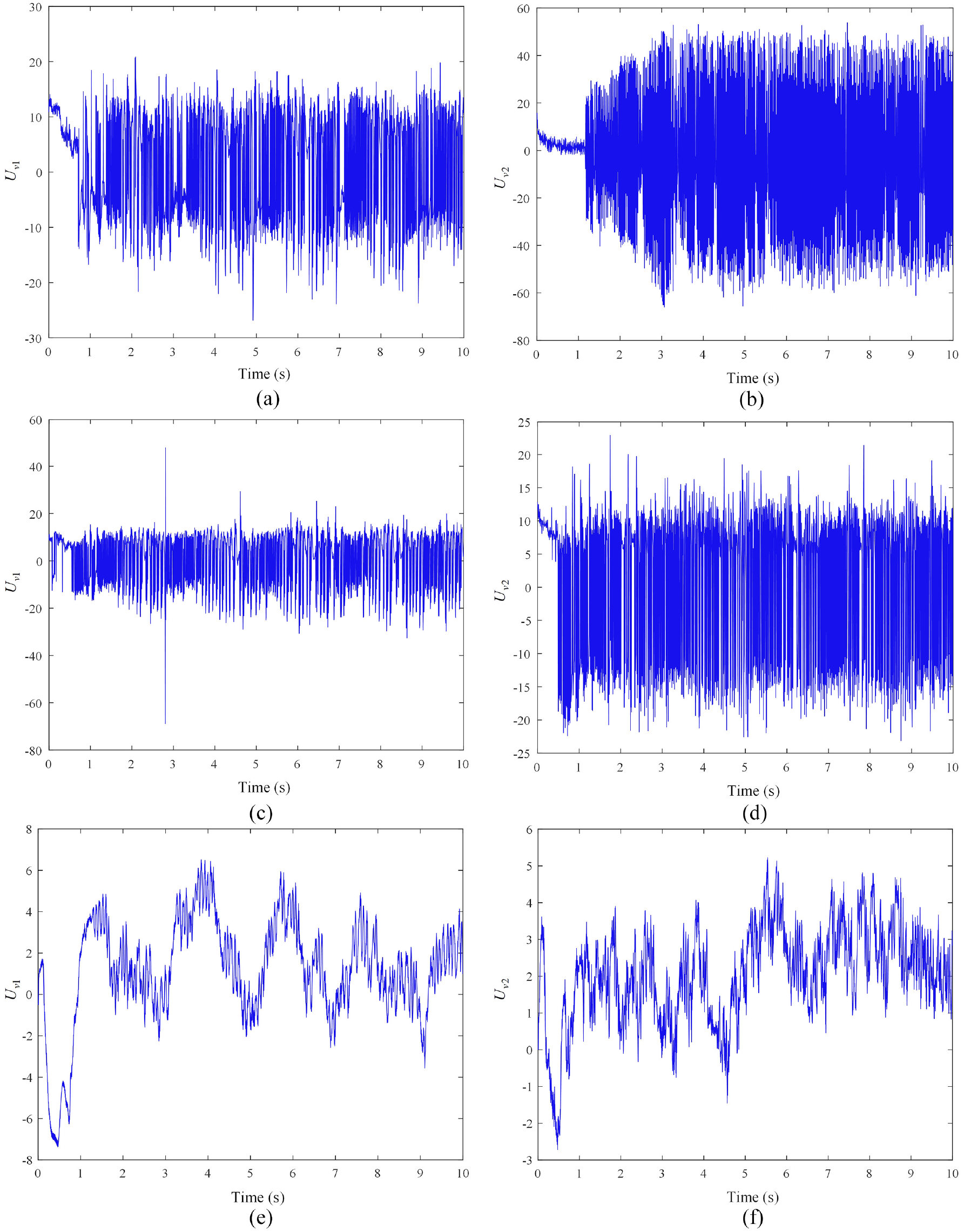
Voltage inputs for the control system (sine trajectory): (a) SM control input for the hip joint. (b) SM control input for the knee joint. (c) TSM control input for the hip joint. (d) TSM control input for the knee joint. (e) TSTSM control input for the hip joint. (f) TSTSM control input for the knee joint.
Response of the state variable
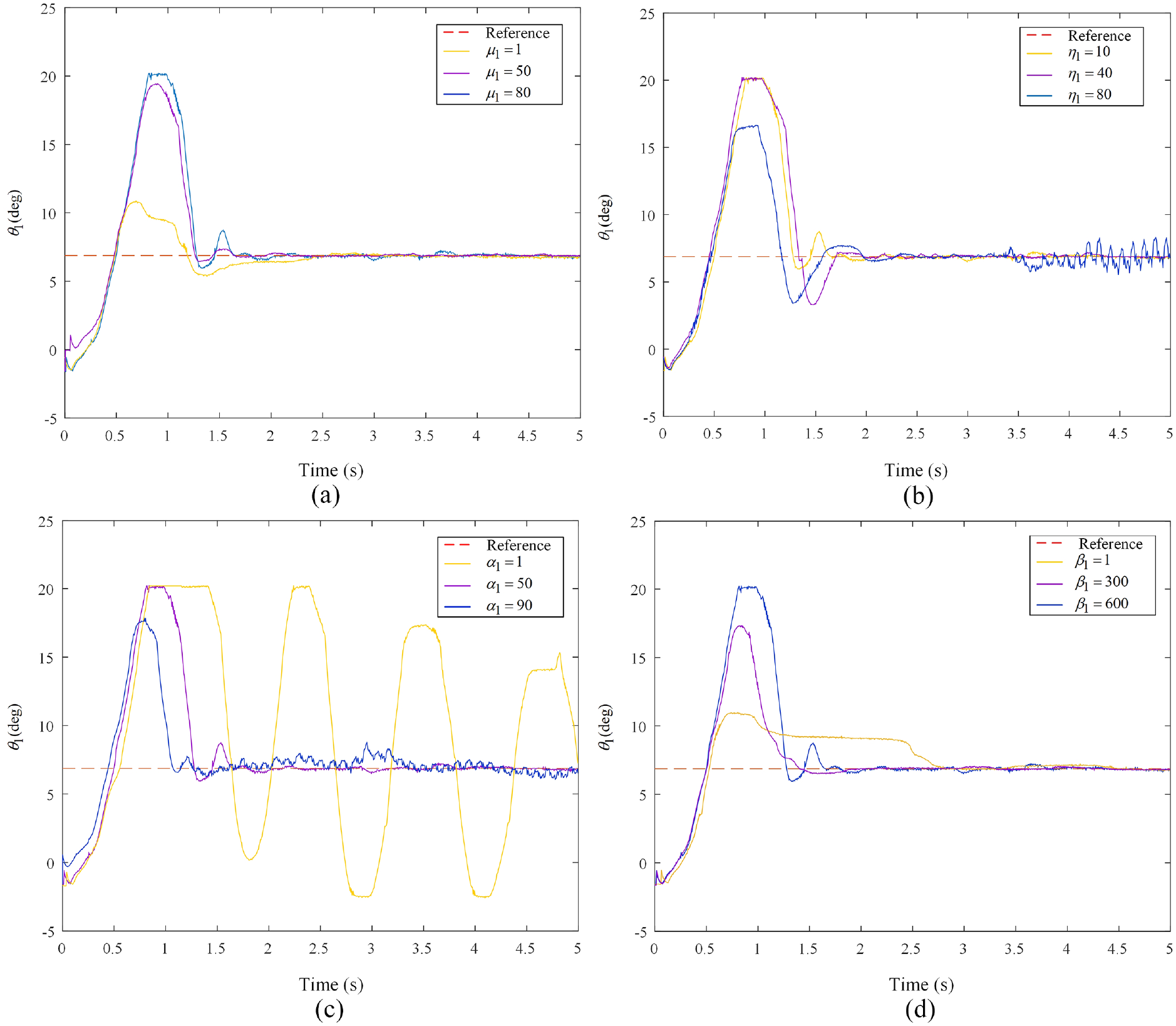
Since the TSTSM require the selection of many control parameters, as shown in equations (17) and (20), we have illustrated various responses of hip joint angle
Conclusion
A backstepping terminal super-twisting sliding mode (TSTSM) controller based on a high-order sliding mode observer (HOSMO) is proposed to control the two DoFs SEA inspired by a humanoid robot’s leg. The HOSMO provides the finite-time convergence of the estimated states, thus eliminating the need for additional sensors. With the obtained estimated states, the main controller successfully drives the states of the overall system to the reference trajectories, while the source of perturbation originating from the combination of the chattering effect and the oscillation of the elastic element is also reduced significantly. The effectiveness of the proposed controller is clearly shown when compared with other control schemes. Experimental results are presented to show the feasibility of the proposed controller. In the future, further studies about how effective the HOSMO is in comparison with other observers will be made. Additionally, the backlash problem in the SEA needs to be addressed as it affects the system heavily.
Footnotes
Acknowledgements
We acknowledge the support of time and facilities from National Key Laboratory of Digital Control and System Engineering (DCSELab), Ho Chi Minh City University of Technology (HCMUT), VNU-HCM for this study.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is funded by Vietnam National University Ho Chi Minh City (VNU-HCM) under grant number TX2022-20b-01.