
Abstract
This work presents an integrated solution for head orientation estimation, which is a critical component for applications of virtual and augmented reality systems. The proposed solution builds upon the measurements from the inertial sensors and magnetometer added to an instrumented helmet, and an orientation estimation algorithm is developed to mitigate the effect of bias introduced by noise in the gyroscope signal. Convolutional Neural Network (CNN) techniques are introduced to develop a dynamic orientation estimation algorithm with a structure motivated by complementary filters and trained on data collected to represent a wide range of head motion profiles. The proposed orientation estimation method is evaluated experimentally and compared to both learning and non-learning-based orientation estimation algorithms found in the literature for comparable applications. Test results support the advantage of the proposed CNN-based solution, particularly for motion profiles with high acceleration disturbance that are characteristic of head motion.
Keywords
Introduction
Accurate measurement of head orientation plays a critical role in providing seamless experiences in virtual reality (VR) and augmented reality (AR) applications. 1 Accurate tracking of head motion and orientation is needed in VR and AR systems to correctly place digital objects relative to the real physical world. For example, AR technology incorporated to the equipment for first responders, such as goggles and helmets, can be used to deliver safety-critical information in real-time, with digital markers that are anchored to physical objects in a person’s field of vision. Head orientation data is also used in health and safety applications, which include the monitoring of fatigue levels and other mental/physical changes in workers that may lead to accidents and injuries. 2 The study presented in the current paper is motivated by the goal of achieving accurate and precise head orientation estimation using measurements from an instrumented helmet.
Infrared cameras and optical flow sensors are among the most accurate solutions in tracking the attitude of rigid bodies. On the downside, the elaborate hardware setups and enclosed environment that these systems need restrict their portability and usage in uncertain environments. Recently, advances in micro-electromechanical systems (MEMS) have led to the development of miniaturized Inertial Measurement Units (IMUs), and their accessibility and packaging have made them a popular solution for orientation estimation systems in VR and AR applications with high mobility requirement.3,4 A standard 9-axis IMU provides measurements of the magnetic field, angular velocity, and acceleration from the integrated magnetometer, gyroscope and accelerometer sensors, respectively.
Measurement noise represents a recurring challenge in all sensor implementations, and IMUs are also susceptible to these external disturbances. For example, measurement noise from a gyroscope can accumulate to cause a drift in the orientation estimate away from the true values. Solutions to mitigate this long-standing challenge in orientation estimation include methods that leverage multiple vector measurements in the inertial and the body frame to estimate orientation. 5 In the case of satellites, these vector measurements can be the direction vectors of the sun and other stars, 6 while in robotics and consumer electronics the gravity vector and magnetic north vector may be used.7,8 By combining and fusing two or more estimates of orientation, the objective of these solutions is to mitigate the sensitivity to noise of individual sensor units and to provide a more accurate estimation of orientation. A small sample of the different orientation estimation algorithms found in the literature is discussed in the next section.
Related works
Orientation estimation algorithms can be broadly divided into two groups based on whether learning-based approaches were used during their design or the design was purely based on a model-based approach.
Non-learning-based methods
Non-learning-based orientation estimation methods can be divided into two categories: Bayes filter and complementary filter. Bayes filter leverages the dynamic model of the moving rigid body and the probability characteristics of the measurement noise to iteratively calculate the most likely orientation. The simplest form of the Bayes filter under a linear observable dynamic model and additive Gaussian measurement noise is the Kalman Filter, 9 while the Extended Kalman Filter (EKF) and the Unscented Kalman Filter (UKF) 10 offer approximated solutions to applications with nonlinear models. Error State Kalman Filter (ESKF) offers an improved alternative to EKF in certain applications by estimating the expected error in orientation calculation. In particular, ESKF has been shown to provide better results than EKF in estimating aircraft attitude 11 and mobile robot actuator orientation. 12
Complementary filters determine the orientation of a rigid body by combining through a weighted average multiple orientation estimates obtained from different observations. 13 In an IMU, these observations may originate from the gyroscope’s angular velocity measurement, or vector measurements of gravity and magnetic field. TRIAD, 5 QUEST, 5 Fast Optimal Matrix Algorithm (FOAM), 14 Optimal Linear Attitude Estimator (OLAE), 15 Fast Linear Attitude Estimator (FLAE) 16 are some examples of orientation estimation solutions from vector measurements. The optimal weights combining the observations in a complementary filter are selected heuristically based on the observed noise levels and characteristics on the input measurements.13,17 Lower weights are assigned to noisy measurements within the time or frequency ranges where the noise observations are predominant, while the remaining input weights are adjusted to maintain the weighted average of the filter output.
Learning-based methods
Learning-based approaches have been used to improve the performance of traditional orientation estimation filters. Support Vector Regression (SVR) 18 has been studied in combination with Kalman filters in Yan et al. 19 to detect the properties of motion profiles and tune the filter parameters for best performance, while20–22 use Recurrent Neural Network (RNN) for the filter tuning process. Artificial Neural Network (ANN) is considered in Chiang et al. 23 for smoothing the output of Kalman filters and improving the accuracy of the orientation estimate.
In more recent works, neural networks have been used to identify black box models for end-to-end orientation estimation. It is shown in Weberet al. 24 that these neural network models based on Recurrent Neural Networks (RNNs) and Temporal Convolutional Networks (TCNs) can outperform non-learning-based methods in some applications. A simple Convolutional Neural Network (CNN) model 25 with reduced number of layers and fast training time is evaluated for applications with quadcopters in Brossard et al., 26 where the model is used to denoise gyroscope measurements. A Long Short Term Memory (LSTM) based model is proposed in Esfahani et al. 27 for estimating changes in quadcopter orientation, where the model uses gyroscope measurements to estimate the change in orientation at a constant sampling time. For applications where the sampling rates are varying over time, Esfahani et al. 28 proposes a modified LSTM-based model that incorporates the sampling rate information as an input to the model. Bidirectional-LSTM (Bi-LSTM), which extracts information from the training data in both the forward and backward direction, is considered for vehicle odometry applications in Zhao et al., 29 where it is shown to improve the estimation results when compared to the standard LSTM. Table 1 summarizes some of these recent works on learning-based methods for orientation estimation and compares them with our proposed method.
Machine learning-based methods for orientation estimation.
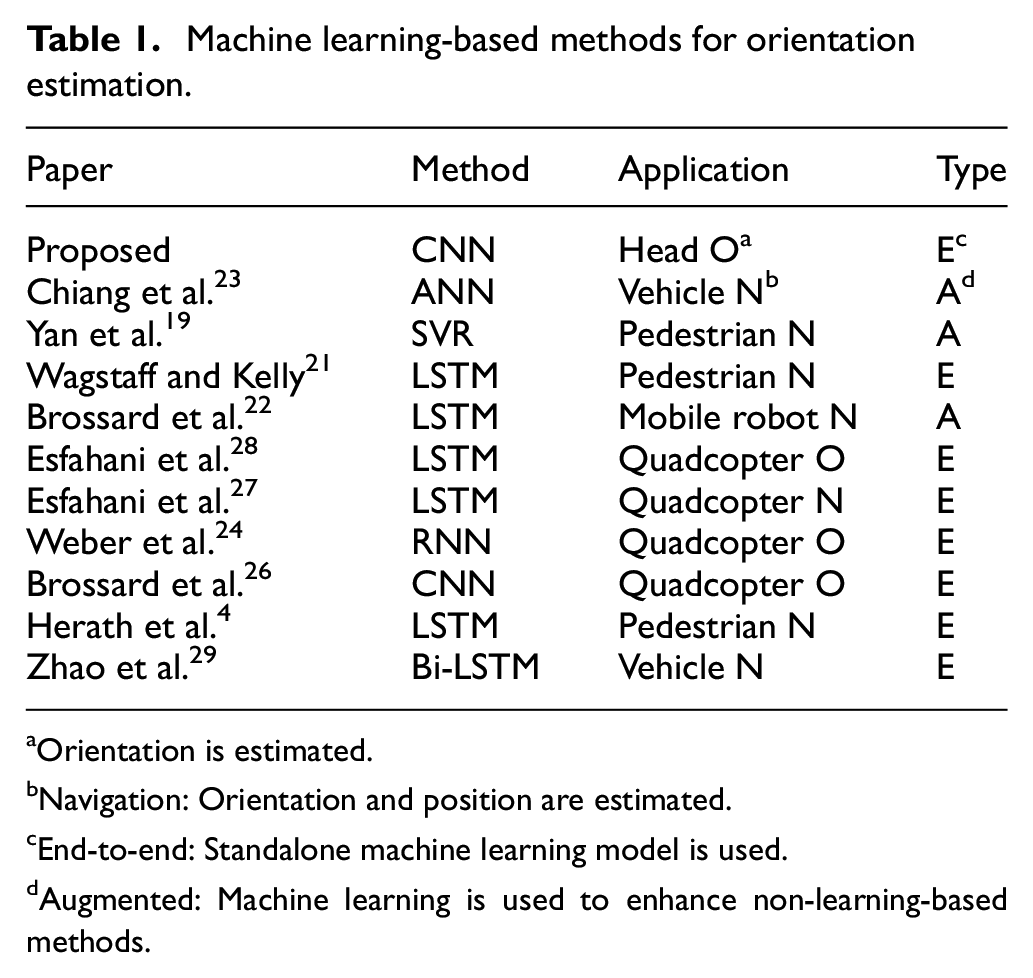
Orientation is estimated.
Navigation: Orientation and position are estimated.
End-to-end: Standalone machine learning model is used.
Augmented: Machine learning is used to enhance non-learning-based methods.
While the integration of machine learning models to orientation estimation methods has been shown to improve accuracy in many application domains, the capabilities of these solutions in applications related to head orientation estimation remain largely unknown. Previous works on head orientation estimation using neural networks, such as,30,31 have mainly focused on solutions that rely on video and images data captured by carefully configured cameras, which limit their applicability in situations requiring high mobility and outdoor usage. Head orientation in VR and AR applications also follow motion profiles that are unique to the activities during which the head movement is measured, and the availability of sensor data varies from comparable applications in which IMUs are used for attitude estimation. For example, much of the previous works with neural network models have been trained and evaluated using IMU datasets such as EuRoC 32 and TUM VI, 33 which are catered to quadcopter flight maneuvers and include motion profiles with lower peak angular velocities than the head motions we consider in our current work. Additionally, neural network models intended for quadcopter applications do not use magnetometer measurements due to the high level of noise that is injected by the motors. This noise can lead to greater drift and error in estimation of yaw angle.
Contributions of this work
Driven by the above-described need for learning-based solutions that can provide an accurate estimation of head orientation, this paper presents a new CNN-based solution that dynamically estimates head orientation from the 9-axis IMU measurements of an instrumented helmet. For the design and evaluation of our proposed solution, a new IMU dataset specific to head motion profiles is collected as part of this study. The new dataset is leveraged in the design of the proposed estimation solution to achieve a more accurate estimate of orientation in applications with high angular velocities and accelerations. A comprehensive evaluation of the proposed solution is provided in this work, including performance comparisons to benchmarks set by non-learning and learning-based algorithms in the literature.26,27 The main contributions of this paper are then summarized as follows.
• A new method for estimating head orientation is proposed, which is inspired by complementary filters, and incorporates a CNN model that dynamically estimates orientation from the 9-axis measurements of IMUs.
• A comprehensive evaluation of the proposed solution is presented here, and its performance in estimating head orientation is compared to benchmarks set by established learning and non-learning solutions found in the literature.
• The HELMET dataset is introduced, which is intended to capture how human head moves while performing various physical activities. Test results are presented to identify the unique characteristics observed in the head motion data, and to verify the effect that these characteristics have on the expected performance of the orientation estimation methods.
Problem description
The objective of this work is to design an integrated solution that can accurately estimate head orientation. The measurements needed for the estimation come from an IMU with a magnetometer rigidly attached to a helmet as shown in Figure 1. The aim is to determine the orientation of the helmet, which is measured by the rotation of the body frame
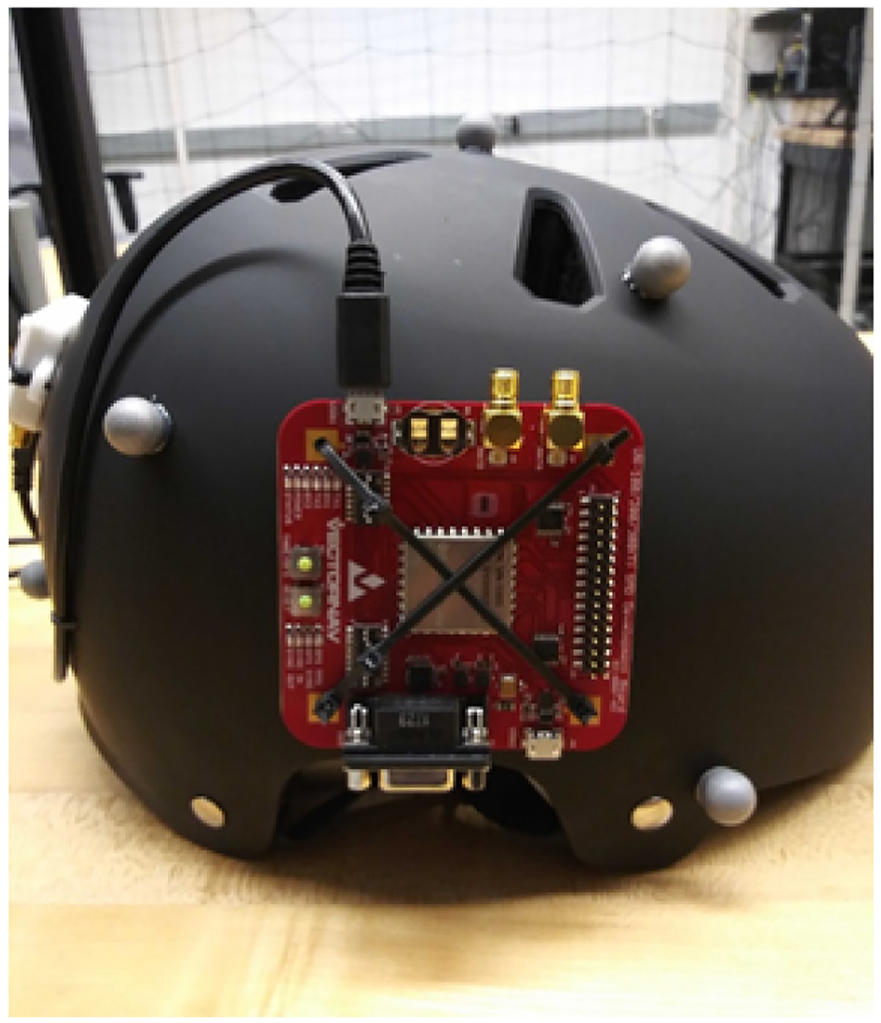
Helmet with vectorNav IMU and markers for the motion capture system.
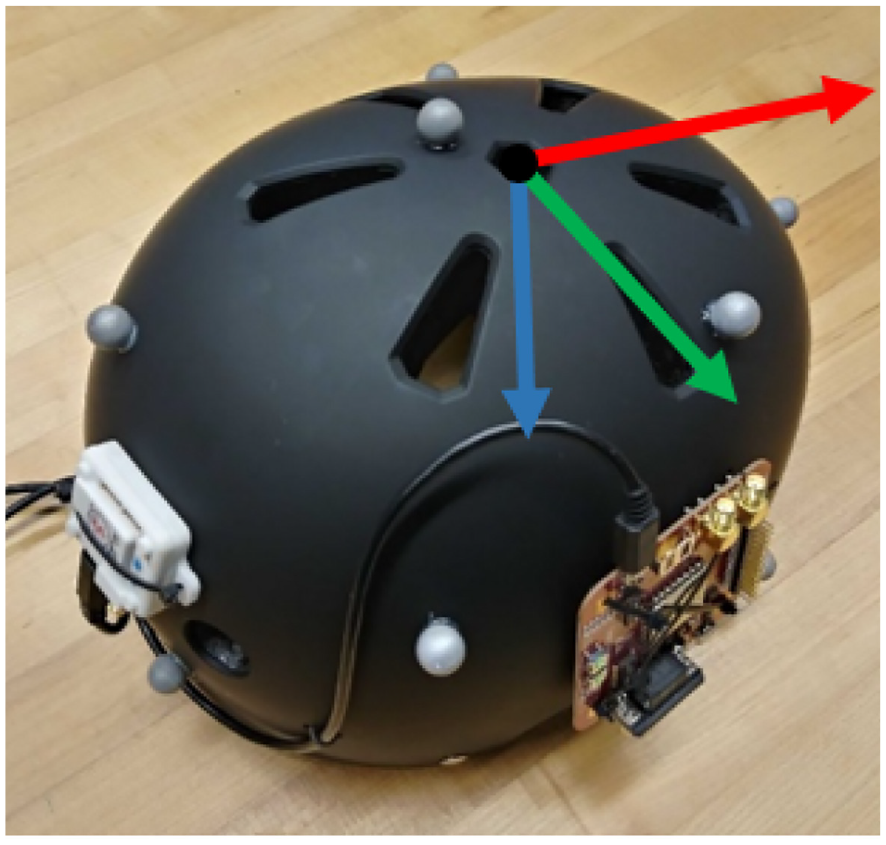
The helmet coordinate frame B. Red is the x-axis, Green is the y-axis and Blue is the z-axis.
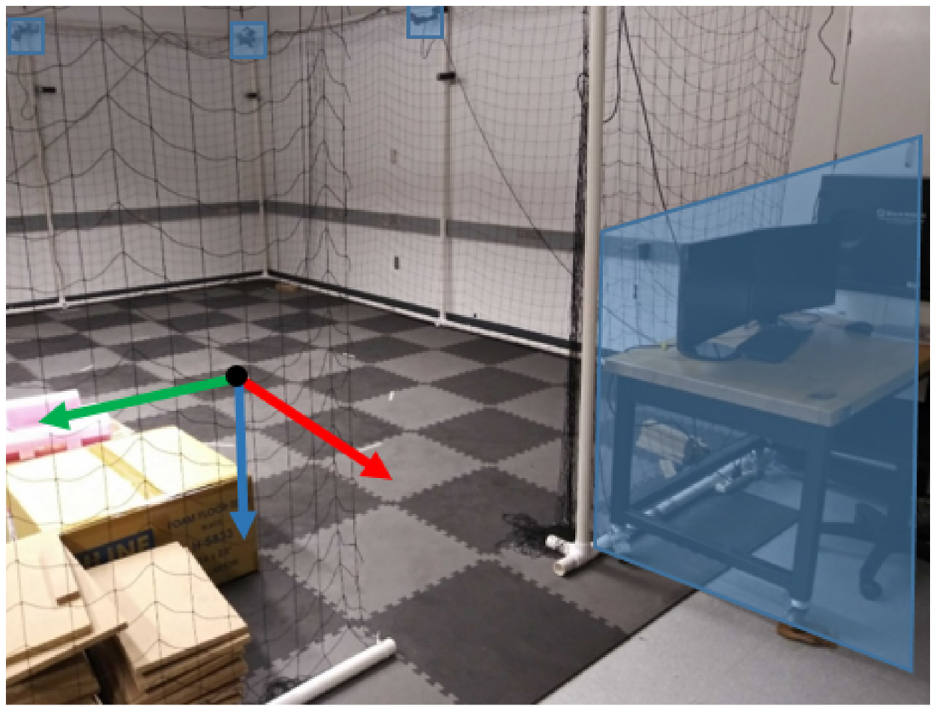
Fixed inertial coordinate frame shown relative to the test floor. A motion capture system consisting of the ground station and infra-red cameras is used to record the orientation of the helmet, which is used as the ground truth during training.
The orientation of the helmet can be obtained from the gyroscope sensor of the IMU, which provides measurements of angular velocities about the body frame. By integrating the gyroscope’s angular velocity measurements
As the orientation estimate

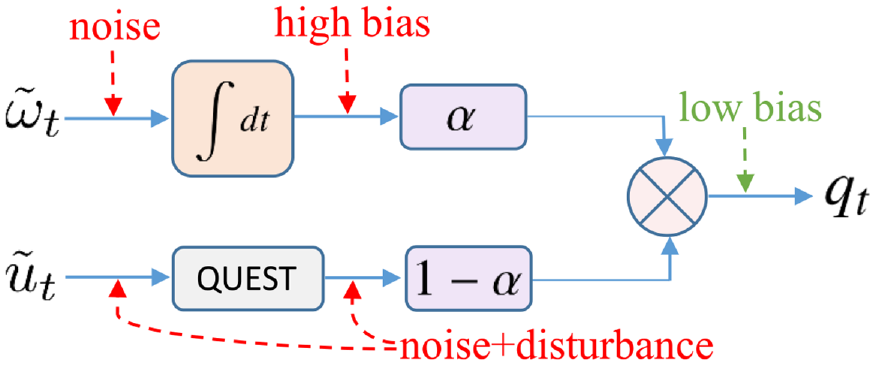
Schematic illustration of the complementary filter. The quaternion obtained from integrating the gyroscope measurements contains high bias, while the quaternion from QUEST contains disturbances and noise. The two are combined to decrease noise and bias.
The properties of the combined orientation estimate
Filter tuning through machine learning
One way to automate the selection of the function

where

where
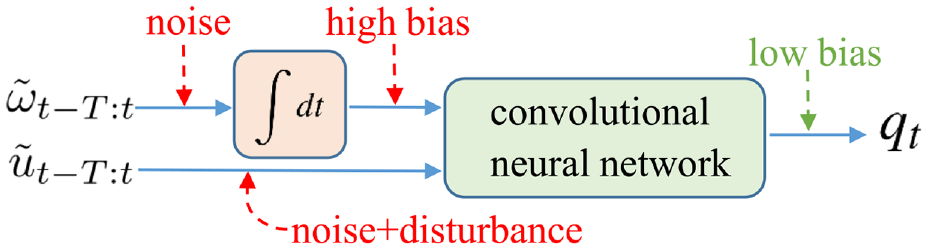
Schematic illustration of the proposed method. Convolutional Neural Network is used to remove bias from quaternion calculated by integrating gyroscope measurements.
Neural network structure
CNN is used for the network architecture in Figure 5 as it results in a less complex network compared to RNN and LSTM, which facilitates training and implementation in practical applications. The sliding convolution filters of the CNN also prevent the overfitting data in the identification of the trained model (3) by taking advantage of the time structure of the input data and promoting connections between input data samples that are closer in time.
As the performance of neural networks is highly dependent on the hyper-parameters of the model, different combinations of hyper-parameters were evaluated in this study for the application of interest. Some of the hyper-parameters of the neural network like learning rate, learning rate drop factor, number of neurons in each layer, and depth of the network were selected using Bayesian optimization, 34 which is a probabilistic estimation method that models the hyper-parameter function using Gaussian processes and then finds the minimum of the estimated functions. Batch normalization was used between linear layers, which improves the trainability of deep neural networks without overfitting the resulting model to the training data. 35 Other hyper-parameters of the neural network such as the activation functions between layers, the loss function, and the optimizer were selected by trial-and-error as to be discussed in the next section. We also used data augmentation to avoid over-fitting the neural network on the training data.
Activation functions
Activation functions are used between linear layers to introduce nonlinearities to the neural network model. The accuracy and generalizability of the neural network model depend on the activation functions used. Sigmoid, Gaussian Error Linear Unit (GELU), rectified linear (ReLU) and tanh are three of the most commonly used activation functions.
36
Recently, activation functions with learnable parameters like Parametric Rectified Linear Unit (PReLU) have achieved better results in different domains.
37
As the output of the CNN in the current application is in quaternion with elements that are bounded by
Loss function
The loss function is another hyper-parameter that determines the performance of neural networks. In the current application, the loss function quantifies the closeness of the rotation quaternion estimated by the CNN model to the quaternion corresponding to the true orientation. In many artificial neural network applications, mean square loss (MSL) is an effective loss function, but for the current model MSL fails to take into account the special structure of the rotation quaternion and it was found to be inadequate. On the other hand, Quaternion Angle Error (QAE) 38 has been shown to provide a more reliable quantification of the closeness between two quaternions, and it is broadly used to evaluate the accuracy of attitude estimation algorithms. Considering rotation quaternions as 4-dimensional unit vectors, QAE is calculated as

where
A simpler approximation of the QAE can be obtained by noting that the angle between two unit vectors

for a pair of estimated rotation quaternions

and

may be used to implement the loss function (5).
The proximity of two rotation quaternions can also be quantified by the quaternion product. The product of a quaternion and its conjugate is equal to the unit quaternion, and thus alternative loss functions quantifying the difference between a pair of estimated and true rotation quaternions can be defined as

where

Let

or alternatively by

Combinations of the loss functions (5), (8), (9) and the total loss (10), (11), are implemented in training of the CNN model for the current application, and a comparison of the trained models’ performances is presented in Section 5.
Optimizer
Optimizers are algorithms used in the training of neural networks to aid in the selection of model parameters that minimize the values of the loss functions. A combination of RAdam 39 and Lookahead 40 was used to train the proposed neural network model. Both RAdam and Lookahead methods have been proven to be effective at optimizing the learning process in machine learning methods, including in applications of orientation estimation. 24
Data augmentation
Data augmentation 41 is a technique used in machine learning to significantly increase the amount of available training data. The augmented data also acts as a regularizer and helps to avoid overfitting the trained model. For orientation estimation, some methods of data augmentation are adding Gaussian noise, adding static bias, and rotating the IMU and magnetic measurements.26,28 The first method is used commonly in machine learning applications and involves adding Gaussian noise to the input data which helps avoid overfitting by forcing the neural network to learn a more general relation between the input and the output training data. Static bias in the accelerometer and magnetometer measurements can appear due to different operating conditions of the IMU like temperature and calibration errors. As this should not cause the orientation estimate to be affected, we can generate accelerometer and magnetometer data with different biases to improve the robustness of the neural network to sensor bias. Similarly, rotating the IMU measurements and the corresponding ground truth orientation provides additional data for training.
The CNN-based model proposed in Figure 5 requires an initial quaternion value for the integration step. This initial value of the integrator is calculated using the QUEST algorithm, which is sensitive to acceleration and magnetic disturbances. As part of the data augmentation process, we can add small variations to this initial quaternion estimate to account for these type of disturbances.
Experimental results
The training and evaluation of the head orientation estimation method proposed in Section 4 are presented here. The CNN model is trained using a dataset of head motion profiles collected as part of this study, and different combinations of training hyper-parameters are evaluated. The performance of the proposed CNN model is also compared to established learning and non-learning-based algorithms proposed in the literature for orientation estimation using 9-axis IMUs, such as the ESKF with magnetic angular rate update 42 and complementary filter with gyroscope bias tracking and disturbance estimation (to be referred as Mahony et al.). 13 We also compared our method to the CNN-based signal denoising method in Brossard et al. 26
Datasets
In order to train and evaluate the CNN model with motion profiles that are relevant to head motion, a dataset (HELMET) of IMU measurements was collected using the instrumented helmet in Figure 1. The inertial and magnetic data is collected using a VectorNav IMU module, 43 which contains a 3-axis accelerometer, a 3-axis gyroscope, and a 3-axis magnetometer. The VectorNav module is rigidly attached to the helmet, which also has eight reflective markers distributed on its outer surface as shown in Figure 1. The position of the markers allows an OptiTrack infrared motion capture system 44 shown in Figure 3 to track the motion and orientation of the helmet with high precision. The measured helmet orientation by the OptiTrack system defines the true rotation between the helmet frame in Figure 2 and the inertial frame in Figure 3. The inertial (acceleration, angular velocity) and magnetic data collected from the IMU serve as the input to the CNN model during training and testing, and the orientation determined by the motion capture system is used as the ground truth.
Twelve sets of motion profile data were collected for the dataset, each of which is 300 s in length and sampled at 250 Hz. The helmet motion data was collected while performing different dynamic activities to cover a wide range of possible motions. Sets numbered 1–4 were recorded for head movements in a sitting position, sets 5–8 were recorded while walking at a slow and medium pace and sets 9–12 were recorded while running with sudden stops. An example of head motion trajectories captured during the recording of the data sets is given in Figure 6. The variance of the accelerometer measurement, and maximum and mean values of the gyroscope measurements are shown in Figure 7. Variance in the accelerometer data quantifies the acceleration due to non-gravitational forces on the helmet, which act as a disturbance during orientation estimation. Sets 1–4 have the lowest variance, while sets 9–12 have the highest variance caused by high acceleration forces during the sprints and the sudden stops. The sets also have different angular velocity profiles. A higher angular velocity results in a greater error during the integration step.
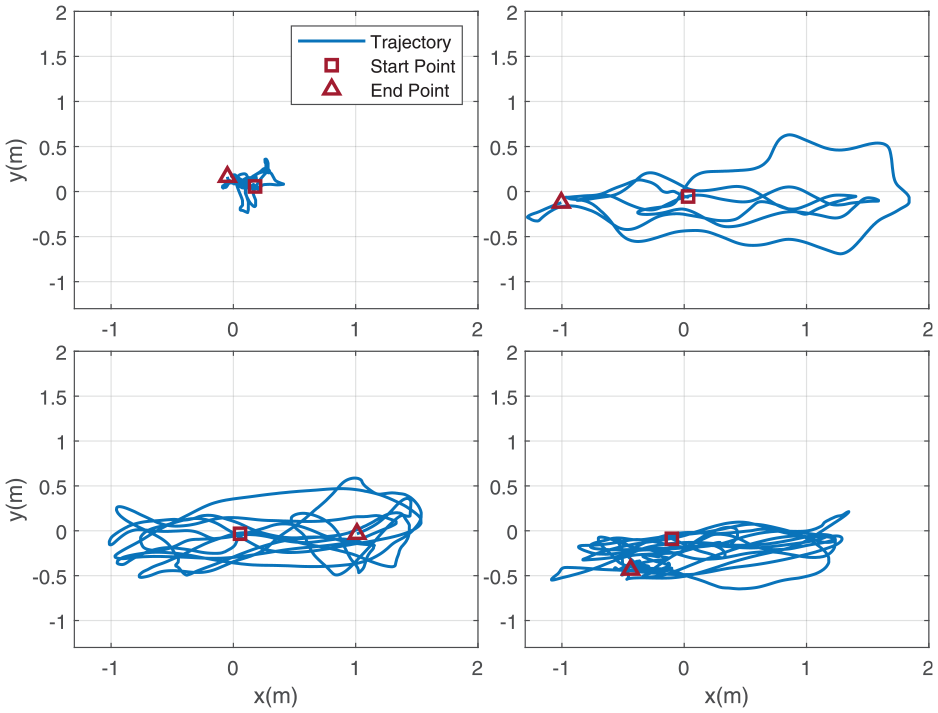
Examples of motion path capture by the OptiTrack system during the recording of the HELMET dataset. Figure shows the trajectories for the first 100 s of Sets 2 (top-left), 7 (top-right), 9 (bottom left) and 12 (bottom right).
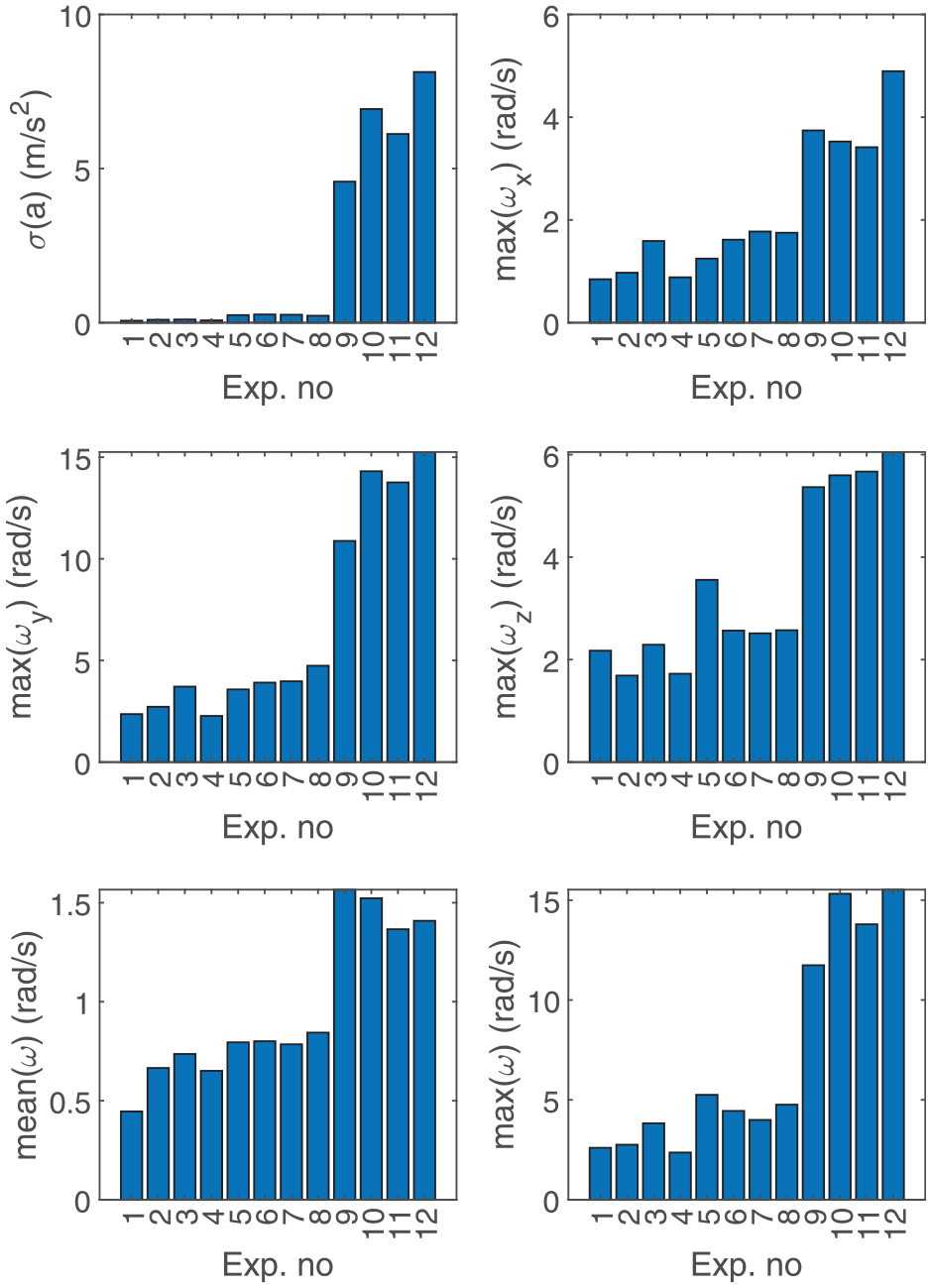
Inertial properties of the HELMET dataset. Top Left: Variance in acceleration measurements, Top Right: Maximum angular velocity along x-axis, Middle Left: Maximum angular velocity along y-axis, Middle Right: Maximum angular velocity along z-axis, Bottom Left: Mean angular velocity magnitude, Bottom Left: Maximum angular velocity magnitude.
Compared to common IMU datasets considered in the literature that are based on quadcopter flight motion, such as EuRoC 32 and TUM VI, 33 the HELMET dataset demonstrates that head motion is subject to higher angular velocities and accelerations. This is illustrated in Figure 8, which compares the angular velocity and acceleration data between EuRoC, TUM VI, and HELMET. Compared to the quadcopter-based datasets, the HELMET dataset has a higher yaw angular rate, which can result in high bias in the estimation and may require the use of magnetometer measurements for correcting the bias error. It is also noted that most neural network models in the literature developed using the EuRoC and TUM VI datasets do not use magnetometer measurements as input, as magnetic field measurements are not reliable around the noise generated by the propeller motors. Therefore, models that are built on only the gyroscope and accelerometer signals experience a more pronounced drift in their estimate of yaw rotation due to the integration of the gyroscope noise. The HELMET dataset has been made available online at. 45
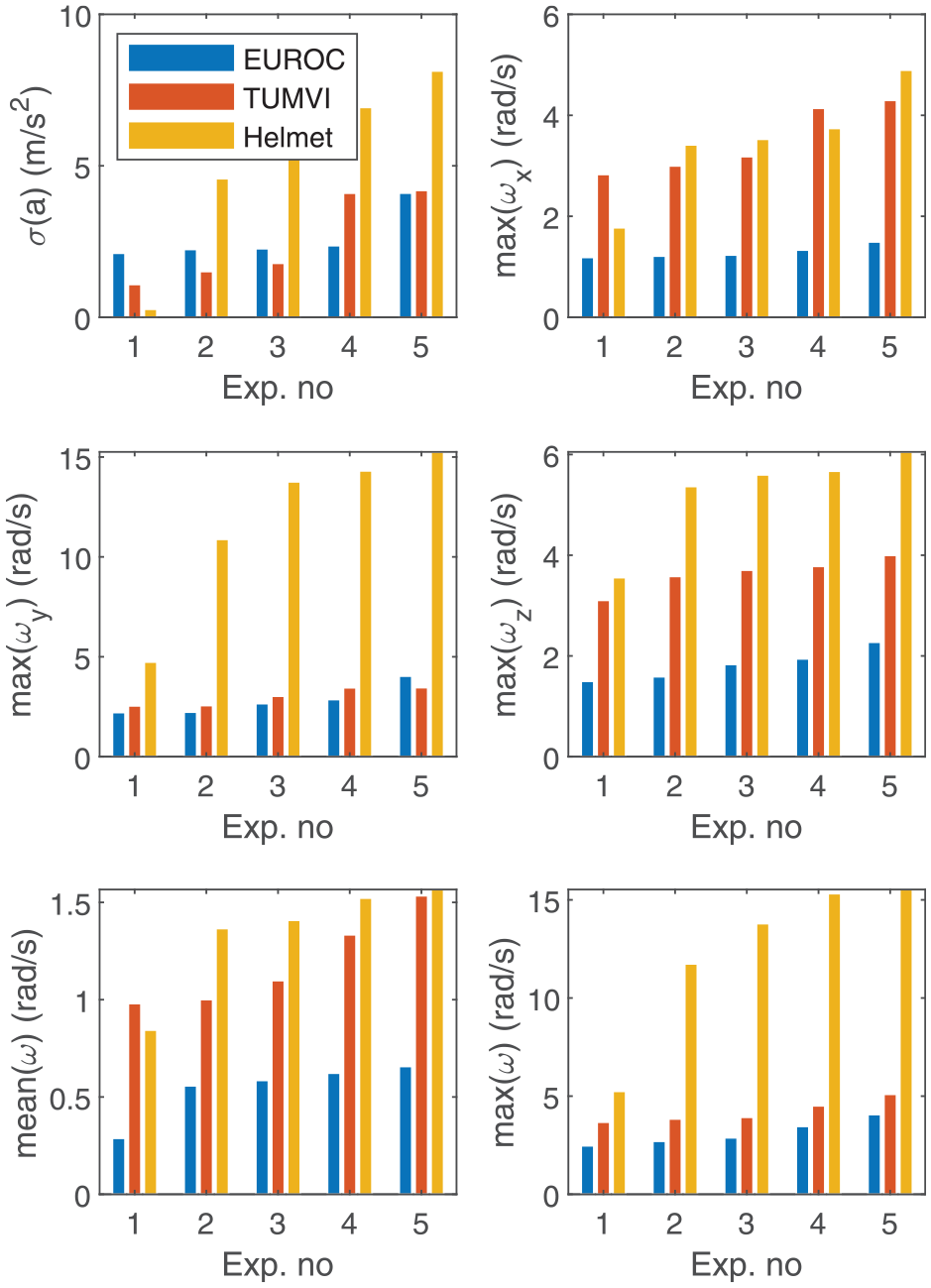
Comparison of EuRoC, TUM VI, and HELMET datasets. Top left: variance in acceleration; top right: maximum angular velocity along the x-axis, middle left: maximum angular velocity along the y-axis; middle right: maximum angular velocity along the z-axis; bottom left: mean angular velocity magnitude; bottom right: maximum angular velocity magnitude.
From the 12 experiments recorded in the HELMET dataset, 12 individual CNN model samples can be trained and evaluated using the leave-one-out cross-validation method. This method splits the set of recorded motion profile data into 11 training sets and one testing set. A CNN model is then trained on the training set data and tested on the one remaining set left out. This procedure is repeated until every set has been included in the testing set. The leave-one-out cross-validation method is used in the training of CNN models for the performance analysis to be discussed in Section 5.3. This procedure is time-consuming but provides better view of the generalizability of the network.
Activation functions and loss
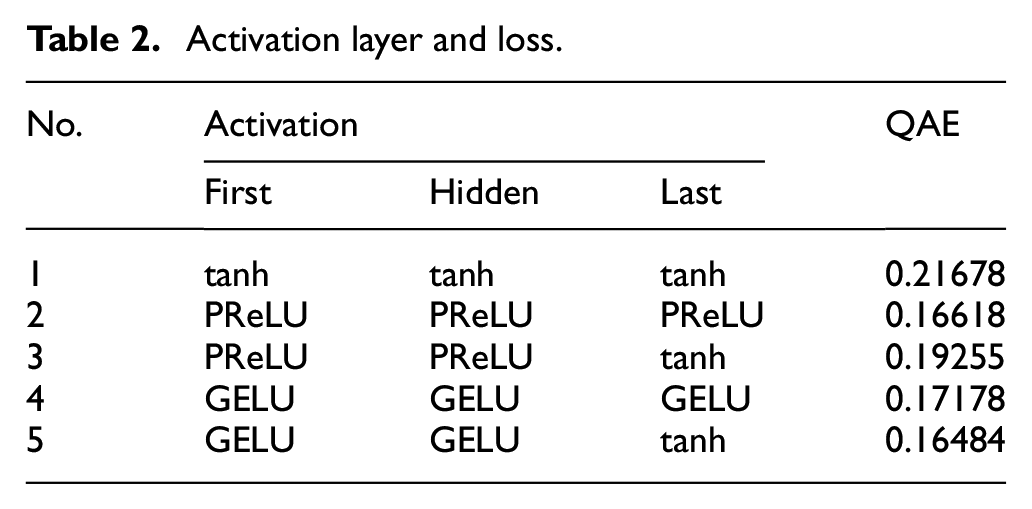
The HELMET data is used to train and evaluate the proposed CNN-based head orientation estimation solution. Different combinations of the activation functions discussed in Section 4.2 were implemented for training the CNN model, and the average QAE (4) of the estimate from the testing data is presented in Table 2. As described in the table, all the hidden layers use the same activation function, while the activation function for the input and output layers were selected independently. A lower QAE value represents a more accurate estimation, and the best results were obtained with the GELU activation function in the first and the hidden layers and the tanh activation function in the output layer. The results in Table 2 are compiled using sets 2, 5, 9, and 12 from HELMET for testing and leaving the rest for training. This distribution of the dataset includes sets from different activities in the testing set and the resulting testing error is more representative of the expected error during deployment of the CNN model.
Activation layer and loss.
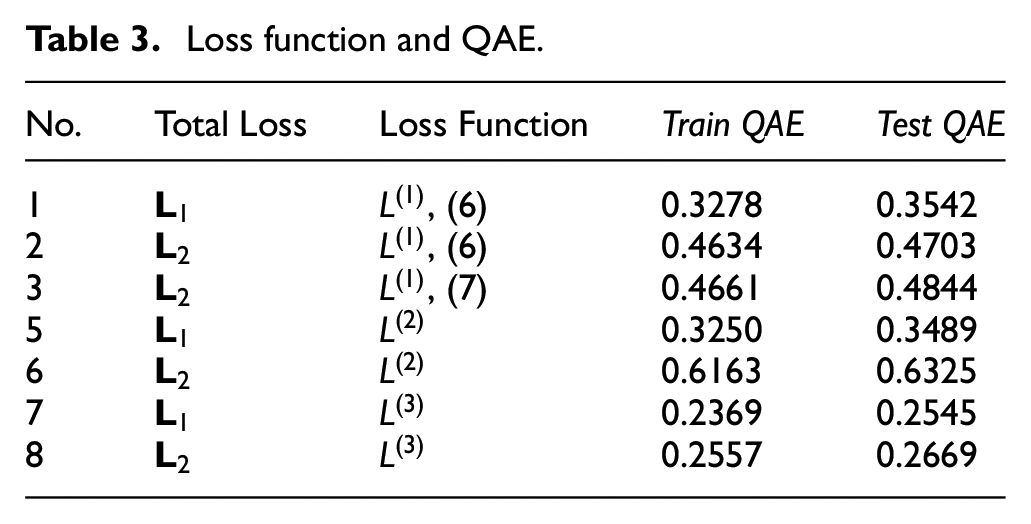
The loss function, as discussed in Section 4.3, is another hyper-parameter in training CNN models that influence the accuracy of the learned orientation estimation solution. A comparison of the average QAE for models trained with different loss functions is presented in Table 3. The small differences between Train QAE and Test QAE for most of the tests in Table 3 show that the trained CNN model is not over-fitted to the training data and generalizes well for the testing data. For the total loss we used either
Loss function and QAE.
The remaining hyper-parameters for the training of the CNN model, such as the dilation gap, filter size, and number of hidden layers, were chosen using a combination of Bayesian optimization 34 and trial and error. The final CNN model used for orientation estimation is shown in Figure 9. The inputs of the neural network are the accelerometer and magnetometer measurements and the quaternions obtained by integrating the gyroscope measurements. The number of past measurement samples used at the input were set to 32, which corresponds to 0.128 s of inertial data. Each inertial measurement is of size 10, which makes the total input features to equal 320.
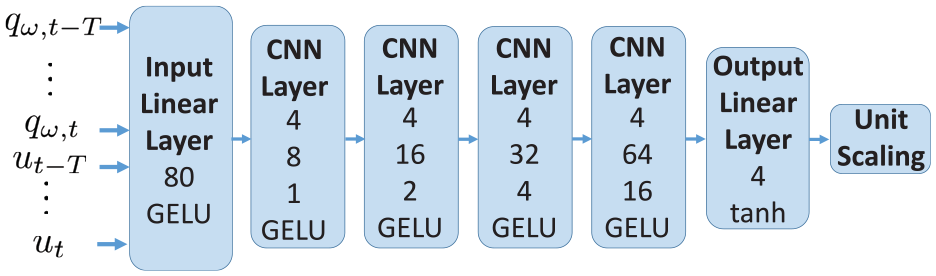
Convolutional Neural Network architecture used for orientation estimation. The parameters of the input and output layer from top to bottom are the output layer size and the activation function. The parameters of the CNN layer from top to bottom are the filter size, the number of filters, the dilation gap and the activation function.
Performance analysis
The proposed CNN-based method (3) is compared to ESKF and Mahony for estimating orientation of head motion. For the 12 trained model samples obtained from HELMET, Figure 10 presents the average QAE quantifying the error between the orientation estimate and the true orientation. Overall, the CNN models show lower average estimation error compared to ESKF and Mahony. We can see that CNN models perform better for all motion profiles, except in Exp. 2 and 3, where the Mahony method slightly outperforms the proposed method. The proposed CNN-based solution significantly outperforms ESKF and Mahony when the magnitude of the acceleration disturbance is high (Exp. 9–12).
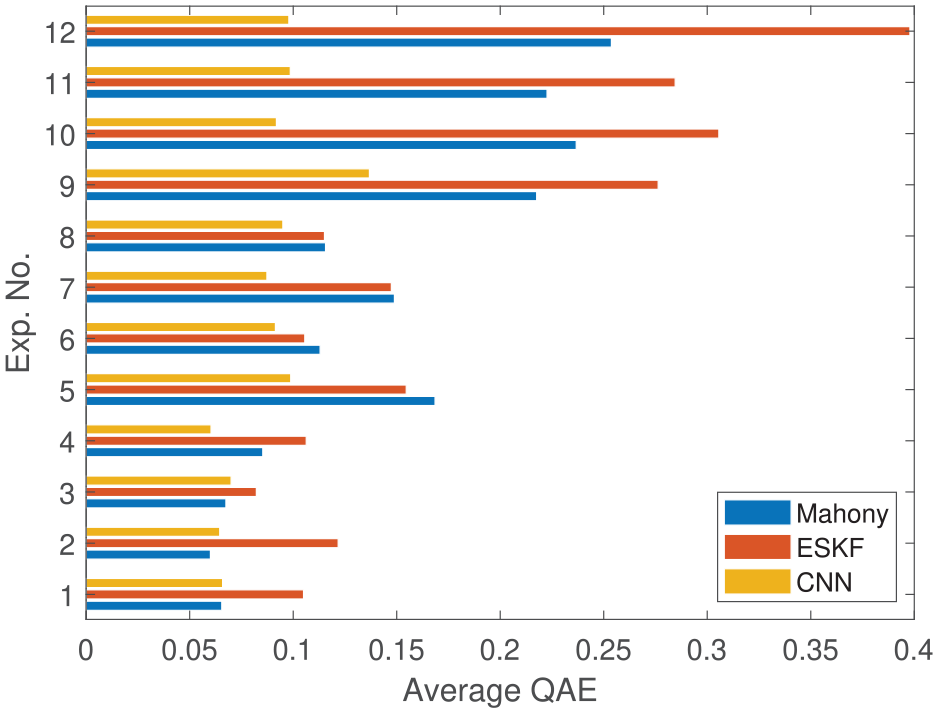
Error comparison of different estimation methods.
We also compared our method with the CNN-based method in Brossard et al., 26 which removes noise from gyroscope data before integrating it to obtain orientation, and the error distributions are presented in Figure 11. For the comparison, models are trained and tested using both the EUROC dataset and the HELMET dataset. It is observed that the proposed method shows a lower average estimation error on the HELMET dataset while the denoising-based method performs better on the EUROC dataset. The contrast in performance is due to the difference in the motion profiles that the two datasets capture, and it illustrates the importance of application-specific orientation estimation solutions. The HELMET dataset captures faster yaw rotations and higher acceleration disturbance than the quadcopter-based EUROC database, and the estimation of the yaw angle in the proposed solution benefits from the corrections introduced by the accelerometer and magnetometer measurements.
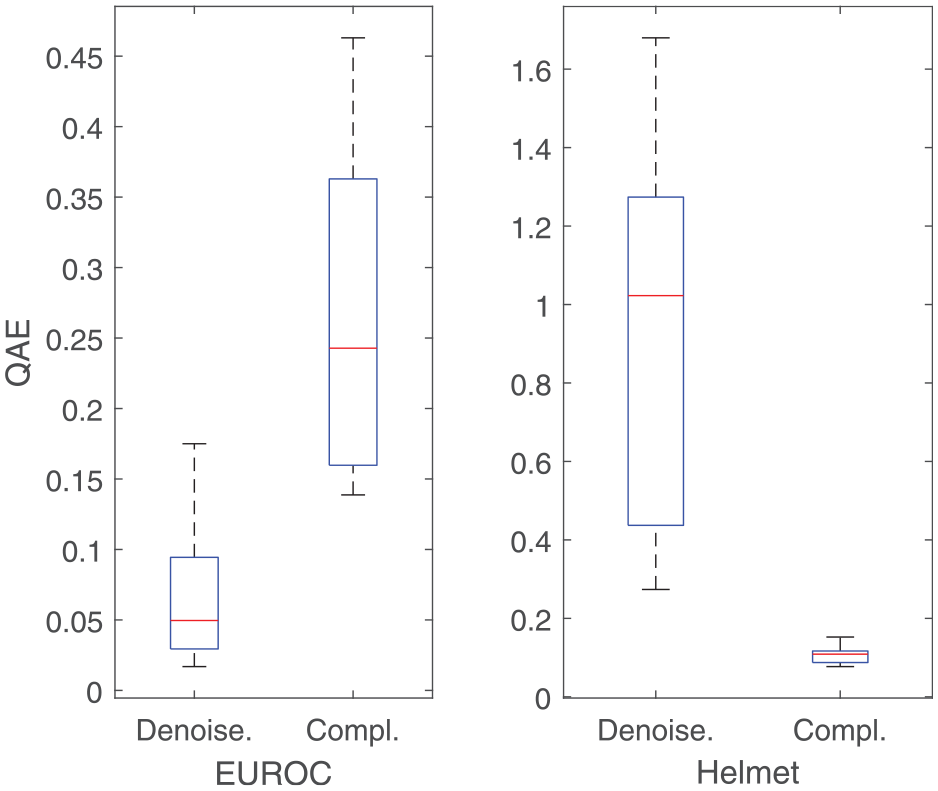
Comparison of QAE of denoising-based method and our complementary based method for EUROC and Helmet datasets.
Robustness
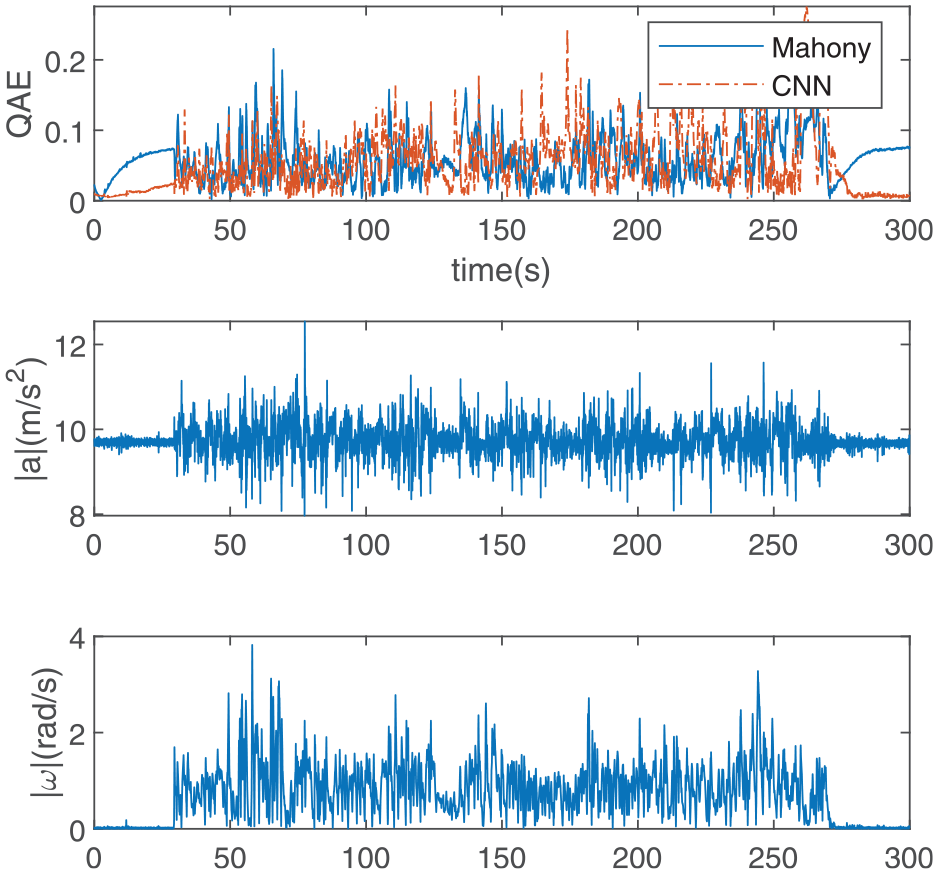
To improve the robustness of the CNN estimator we used sensor data that contained different levels of acceleration disturbances for training. As a result, CNN performs better than other techniques when disturbances are high at the cost of losing some accuracy under normal conditions. This can be seen in Figure 10 where the accuracy of CNN is greater for experiments with high acceleration disturbance (Exp. 9, 10, 11, and 12), while the average error from Mahony is slightly lower in Exp. 2 and 3. We can see in Figures 12 to 14 that, when the acceleration disturbance is low the QAE of our CNN-based solution is comparable to other methods, while under high disturbance the QAE of the proposed solution is significantly lower.
Comparison of QAE of Mahony and CNN for Exp. 3.

Comparison of QAE of Mahony and CNN for Exp. 7.
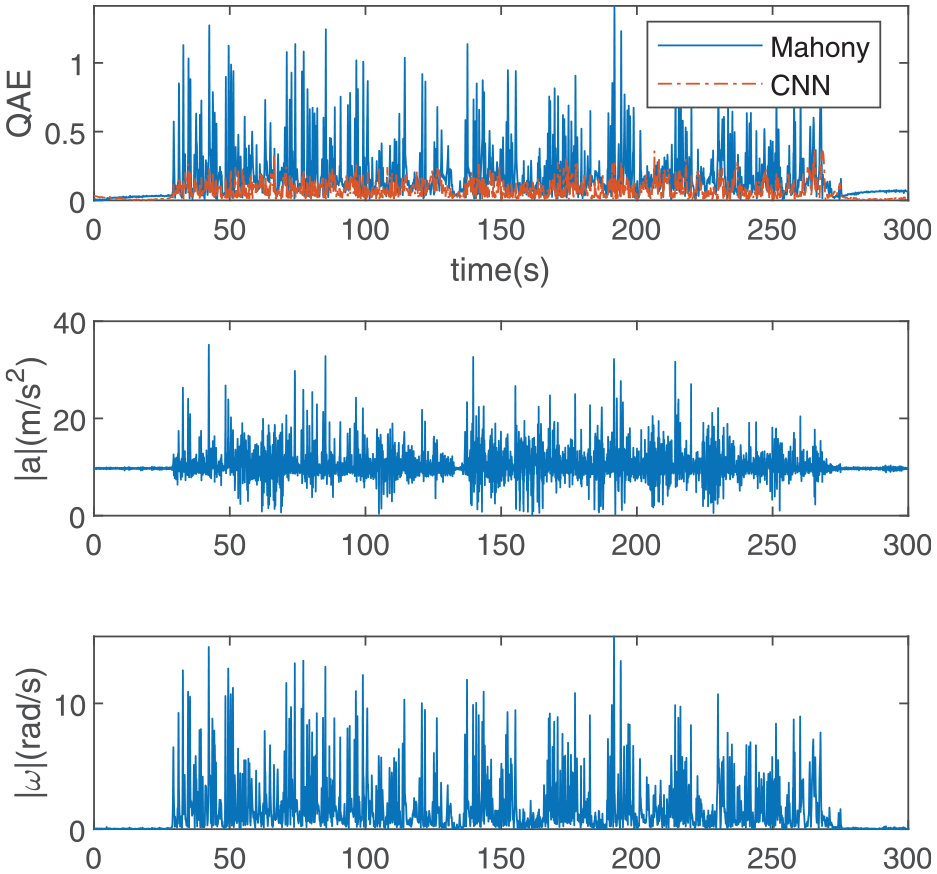
Comparison of QAE of Mahony and CNN for Exp. 10.
Conclusion
An integrated solution for head orientation estimation was presented in this work. The proposed solution used the inertial and magnetometer measurements from an instrumented helmet, and a CNN-based estimation algorithm was developed motivated by complementary filters. The CNN model was trained and evaluated on data collected to represent a wide range of head motion profiles. The selection of hyper-parameters for the CNN model was discussed in detail, and the final selection was optimized for the application considered in this work.
The proposed orientation estimation method was evaluated experimentally and compared to both learning and non-learning-based orientation estimation algorithms found in the literature for comparable applications. Test results prove the advantages of the proposed CNN-based solution, particularly for motion profiles with high acceleration disturbance that are characteristic of head motion.
It should be noted that the IMU measurements in the HELMET dataset capture a wide range of acceleration disturbances that are characteristic of head motion, but the dataset does not consider variations in the magnetic disturbance level that may result from external sources of magnetic fields. Therefore, models trained from HELMET may display sensitivity to magnetic disturbances. Another possible limitation of HELMET is that the collected data is sampled at a constant sampling rate, and the effect of variable sampling rate is not considered in this study.
Future work is planned to evaluate the proposed solution in situations with intermittent periods of high magnetic disturbance, and investigate solutions to enhance the robustness of the estimation under these noisy magnetometer measurements. A possible solution may involve multiple CNN models that are trained to carry out the estimation of orientation at different levels of electromagnetic disturbance. New sensing systems and related algorithms could also be investigated to improve head orientation estimation and enable trajectory estimation. Finally, variable sampling frequency of the IMU measurements, and extensions of the proposed solution to accommodate for this change in the input data, are also to be included in future work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the New Hampshire Innovation Research Center [grant number 13R307].