
Abstract
A robust iterative learning control algorithm is proposed for continuous-time switched singular systems disturbed by random measurement noise. Firstly, the switched singular systems is transformed into a differential-algebraic equation composed of slow subsystem and fast subsystem by nonsingular transformation. Then, the control input is continuously modified by the state measurement errors and the learning gain with attenuation characteristics. The convergence of each subsystem is strictly proved in theory, and the sufficient conditions for the convergence of this algorithm are given. Theoretical analysis shows that the algorithm can effectively suppress the measurement noise and make the system state completely track the desired trajectory in a finite time interval. Finally, compared with the fixed gain iterative learning control method, the simulation results show that the tracking accuracy of the proposed algorithm is significantly improved.
Keywords
Introduction
A switched singular systems is composed of several singular subsystems as well as a switched rule. The former are described by a family of differential or difference equations, the latter is used to coordinate operation between the various subsystems. 1 Switched singular systems have a wide application background, and many practical models can be described by switched singular systems, such as power systems, networked control systems, and robot systems and so on. 2 Therefore, it is of great significance to study switched singular systems in theory and practice. However, compared to nonsingular switched systems, singular switched systems have more complexity in stability and controller design, 3 due to the existing problems of uniform initial state, impulse modulus elimination, regularity etc. In recent years, a number of research achievements on switched singular systems have sprung out, which focus on guaranteed performance control and H∞ control,4–8 stability analysis and its synthesis.9–16 The main research methodologies used in those researches involve dwell-time and average dwell-time method,6,7,9,11,13,15 multiple-Lyapunov function approach,4,8,10,12,14 common-Lyapunov function approach and so on.5,16
The iterative learning control method is aimed at the system performing repetitive tasks in a finite time interval to obtain the desired control law through repeated learning by using the system information obtained from the previous iteration, realizing the complete tracking of the desired trajectory in the finite time interval. 17 Owing to its simple design and only requiring less dynamic characteristic knowledge and online calculation, there have been fruitful research results through near three decades of development since the algorithm was put forward.18–29 Most of these results are neither switched systems nor singular systems.18–22 Since the iterative learning control method has the above advantages, this method is widely used in various fields. For example, Shi and Huang 30 applied the iterative learning control method into the speed control of ultrasonic motor and achieved good control performance. Dai et al. 31 used an adaptive iterative learning control method to improve the load torque tracking performance of power system. Zhang et al. 32 proposed a method of combining adaptive predictive control with iterative learning control, and applied this method into ramp control and achieved good control results. Chen et al. 33 applied a robust iterative learning control method to further improve the trajectory tracking accuracy of UAV. Moreover, iterative learning control method can not only design the controller, but also realize the fault diagnosis of the system.34–36
In recent years, many achievements have been made in the research of iterative learning control for switched systems and singular systems.23–29 For example, for switched systems with arbitrary switched rules, Bu et al. 23 gave the convergence conditions of derivative-type iterative learning control algorithm, and realized the complete tracking of the system output to the desired trajectory in a finite time interval. For fractional-order linear continuous-time switched systems with noise disturbance, Zhang and Peng 24 proposed a fractional-order iterative learning control algorithm and gave sufficient conditions of the convergence of the algorithm. Shao and Xiang 25 discussed the adaptive iterative learning control method for uncertain continuous-time switched systems, achieving the tracking errors converge to zero in the iterative domain. Hussain et al. 26 designed a gain adaptive iterative learning control method to solve the tracking problem of linear discrete-time singular systems. In order to realize the complete tracking of the discrete-time singular system state to the desired state in a finite time interval, Tian et al. 27 proposed an iterative learning control algorithm. The above research results consider the iterative learning control problems of switched systems or singular systems respectively, and there is no research on switched singular systems. However, in practical engineering, there are many control systems which are switched singular systems, thus some scholars apply iterative learning control methods into switched singular systems.28,29 For example, Gu et al. 28 proposed a closed-loop iterative learning control algorithm and gave the convergence conditions of the algorithm for linear continuous-time switched singular systems with state delay, solving the problem of complete tracking of the desired trajectory in finite time interval. For linear discrete-time switched singular systems with arbitrary switching rules, Gu and Tian 29 uses iterative learning control method to make the system state completely track the desired trajectory in a finite time interval.
Although Gu et al. 28 and Gu and Tian 29 used an iterative learning control method to solve the trajectory tracking problem of switched singular systems, they took no consideration of the influence of measurement noise on tracking errors. As we all know, iterative learning control only uses measurement errors to constantly modify the control input, so as to achieve complete tracking. However, in the practical engineering application, the measurement error will inevitably be disturbed by the measurement noise, which reduces the tracking accuracy of the system. For the problem that external disturbances affect the control accuracy, many scholars have designed robust controllers.37–39 But, these research results of noise removal are for nonsingular and nonswitched systems, and do not use iterative learning control methods. Iterative learning control method is not better than other control methods in noise suppression. However, the main advantage of iterative learning control is that the design of the controller does not depend on the mathematical model of the controlled system, and the structure of the controller is simple and convenient for engineering implementation (similar to the design of PID controller). The controller design of other methods depends on the mathematical model of the controlled system, such as backstepping control, sliding mode control, finite time control and so on. These control methods can effectively suppress the measurement noise by means of parameter adaptation or parameter estimation. However, the design of the controller depends on the mathematical model of the controlled system, and the controller has many parameters as well as its structure is complex, so that it is difficult to realize in engineering. (The design of the fuzzy controller does not depend on the mathematical model of the controlled system, but it is difficult to determine the fuzzy rule table in fuzzy control, and there is an online fuzzy reasoning process with a large amount of calculation.) Therefore, when the mathematical model of switched singular systems is unknown, in order to suppress measurement noise and improve the tracking accuracy of systems with measurement noise, this paper will further study the iterative learning control problem of switched singular systems with measurement noise disturbance. The main idea of this paper is to design a learning gain that attenuates along the iterative axis on the basis of Gu et al.,28,29 and gradually reduces the influence of measurement noise via the attenuation factor.
In view of the above analysis, in order to solve the state tracking problem of switched singular systems affected by measurement noise in finite time, a robust iterative learning control algorithm is proposed in this paper. The switched singular systems are firstly transformed into a differential-algebraic equation consisted of the slow subsystem and the fast subsystem via nonsingular transformation. The iterative learning control algorithm is constructed by using the state error derivative of the slow subsystem and the state error of the fast subsystem. In addition, a learning gain attenuated along the iterative axis is designed in this algorithm in order to reduce the influence of measurement noise. That is, a coefficient is added before the measurement error, and the coefficient decreases gradually with the increase of the number of iterations. Therefore, the measurement noise will be gradually reduced with the increase of the number of iterations, thus improving the tracking accuracy. At the same time, based on the contraction mapping method, the convergence of each subsystem is proved, and the convergence conditions of the algorithm are deduced. The algorithm further improves the tracking accuracy and realizes the state of the switched singular systems with measurement noises the complete tracking of the desired trajectory in a finite time.
The main contribution of this paper is reflected in the following two aspects:
compared with the traditional control methods,7–10 the controller design of this method does not need to know the mathematical model of the controlled system, and only the input and output data can completely track the desired trajectory. Therefore, this method can realize state tracking for switched singular systems which are difficult to establish mathematical modeling.
Compared with the recent research results,28,29 this method considers the influence of measurement noise on the tracking accuracy, enhances the robustness of the controller and further improves the tracking accuracy.
Problem description
Consider a following class of switched singular systems with repetitive operation characteristics in finite time interval

where

Let

where (3) is slow subsystem, (4) is fast subsystem.

where
As we all know, the measurement errors are usually used to correct the control input in the iterative learning control algorithm. When the system is disturbed by measurement noises, the actual measurement states are
Therefore, according to the above analysis, in order to reduce the influence of measurement noises on tracking accuracy, this paper designs the following robust iterative learning control algorithm for switched singular systems (3) and (4) satisfying the Assumptions 1–4.

where
The block diagram and algorithm flow chart of the iterative learning control system are shown in Figures 1 and 2.
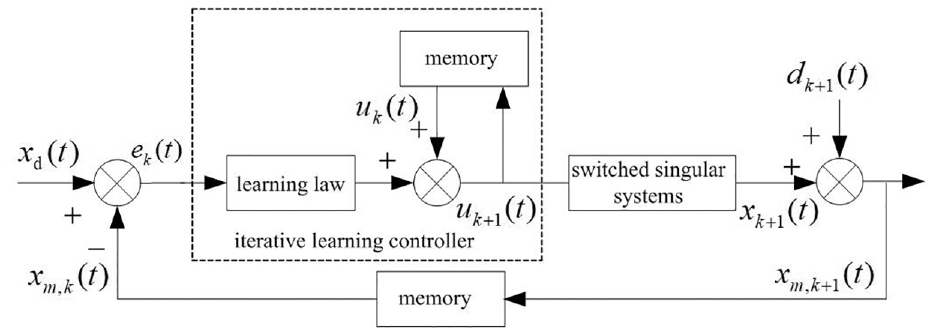
Block diagram of iterative learning control system.
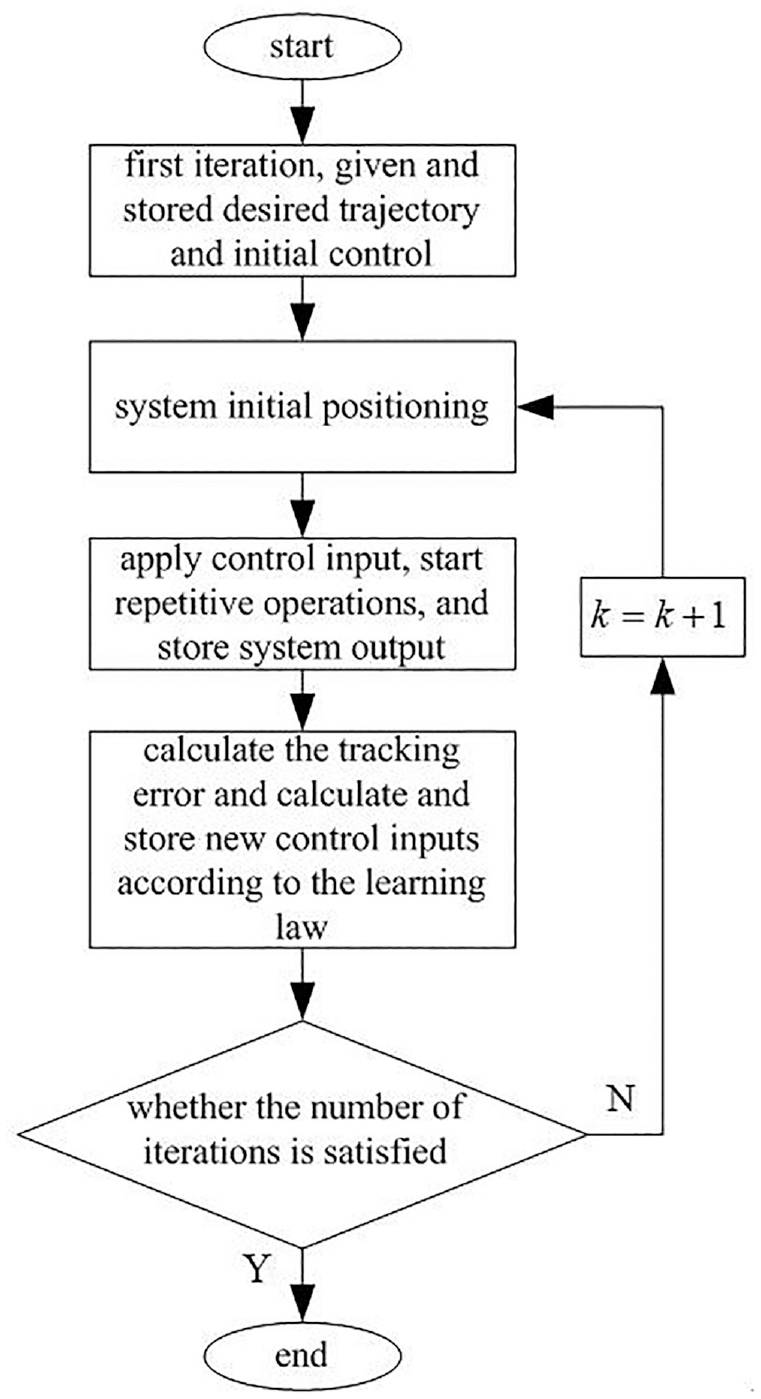
Flow chart of iterative learning control algorithm.
The task now is to find when the learning gain matrices
Main result
Here, first give the following definitions and lemmas to facilitate to prove the convergence of algorithm (6).

where

there exists
For convenience of discussion, let us suppose each subsystem of systems (3) and (4) run only once in the limited time domain
At the time, the switched singular systems (3) and (4) may be rewritten as


where
Since

where

where
As known from above analysis, we can get (11) from switched singular systems (8) and (9). Therefore, the following state response of (11) can be obtained according to the switching rule (7).
Denote
where
As a result, we can make the following main result.

the control algorithm (6) can make the system state

where
Again according to (10) and Assumption 2, we get
Substituting (16) and (17) into (15) yields
where
Next, individually discuss the convergence in the time domains of
(1) When
Substituting (19) into (18) yields
Taking the norm for both sides of (20), we obtain
Again, multiplying both sides of (21) by
where
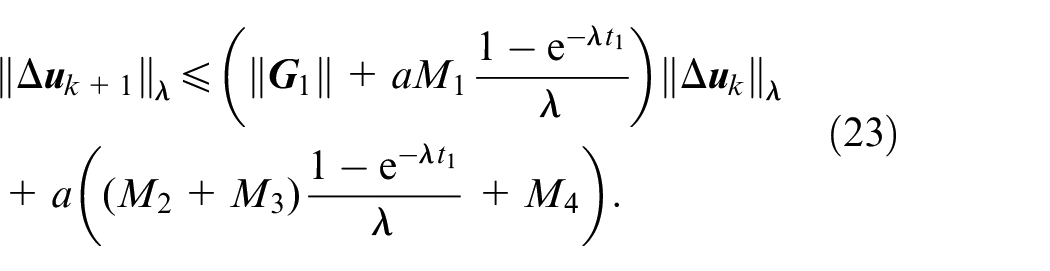
Based on condition (14) in Theorem 1, when selecting

Since

It implies that if gains
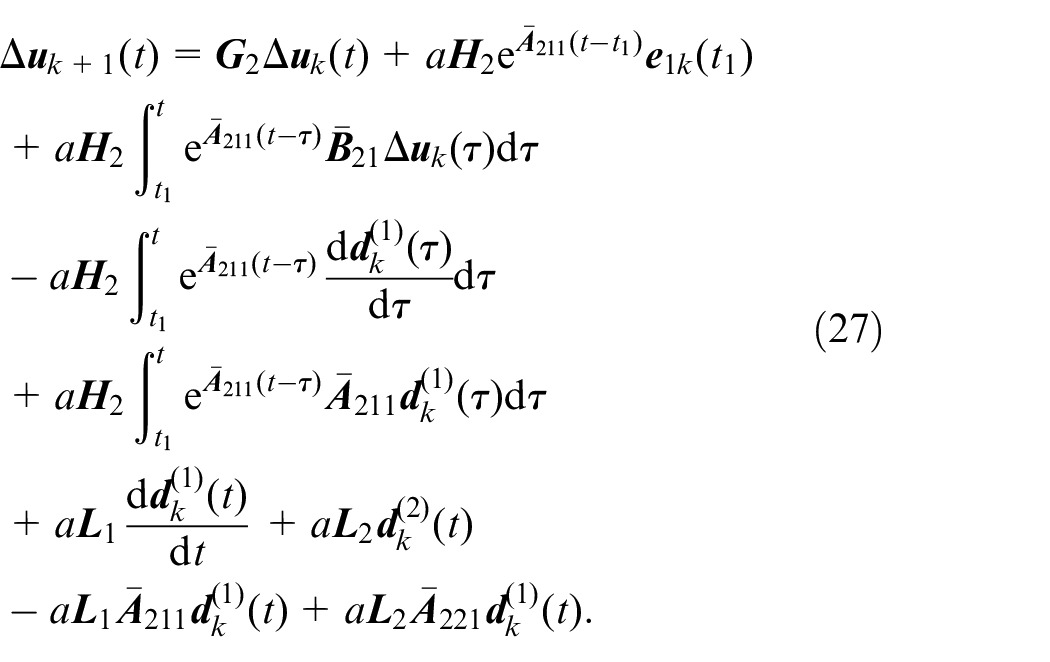
(2) When
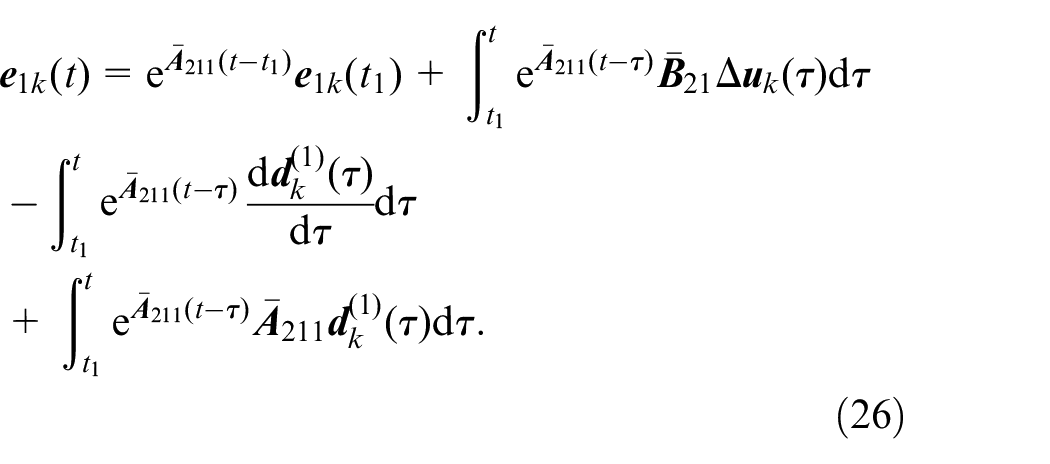
Substituting (26) into (18) yields
Taking the norm of both sides of (27) achieves
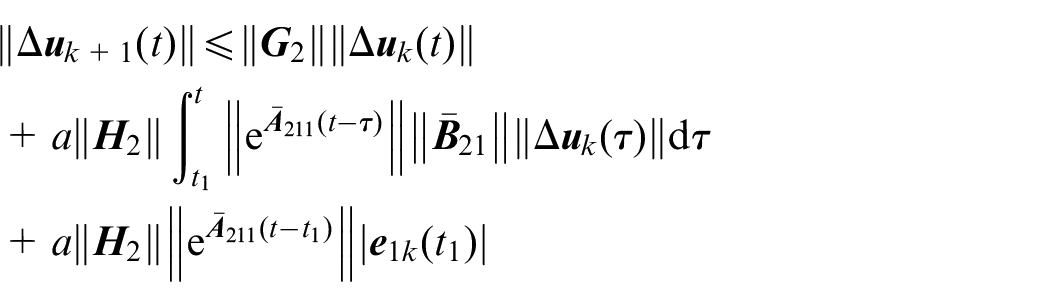
Similarly, multiplying both sides of (28) by
where
when selecting

Although the state

It implies that if learning gains
By analogy, we may prove algorithm (6) is convergent in the time interval of
Simulation experiment
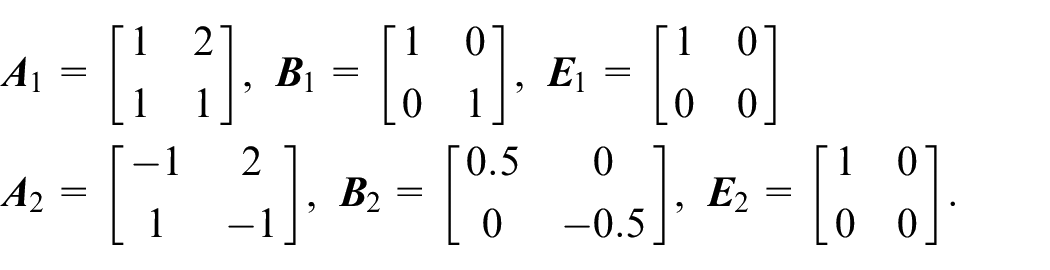
To testify the validity of algorithm (6), consider a following class of switched singular systems described as

where
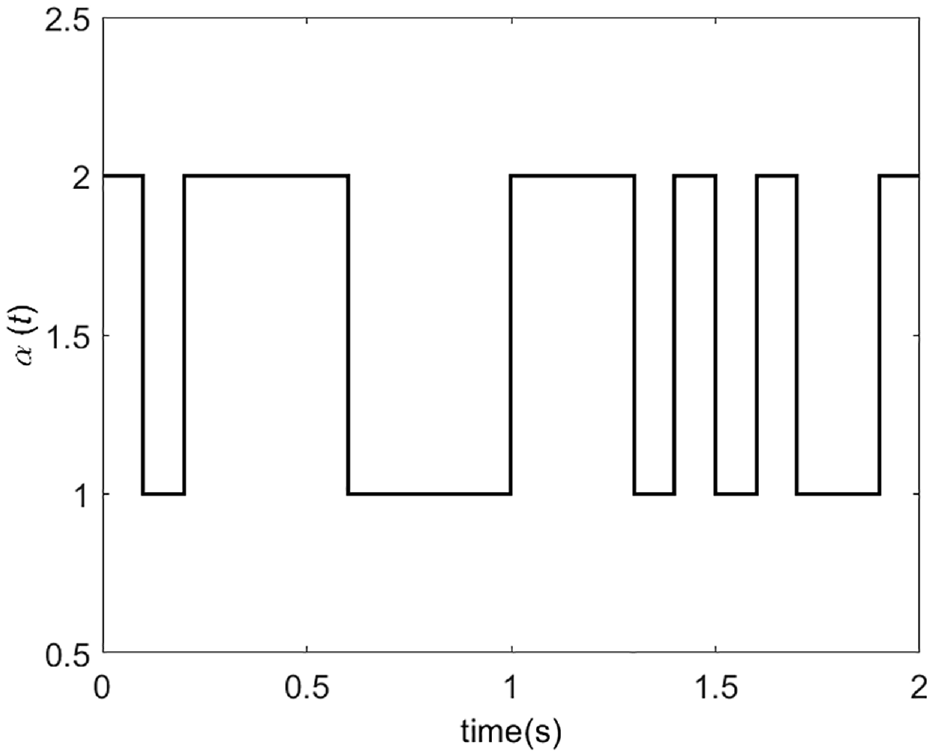
The switched sequence α(t).
For the switched singular system (33) controlled by algorithm (6), let operation time be

Besides, learning gain matrix is chosen as

In order to better illustrate the tracking effect of the proposed algorithm (6), this algorithm (6) and the fixed gain iterative learning control algorithm (i.e. the adjustment parameter
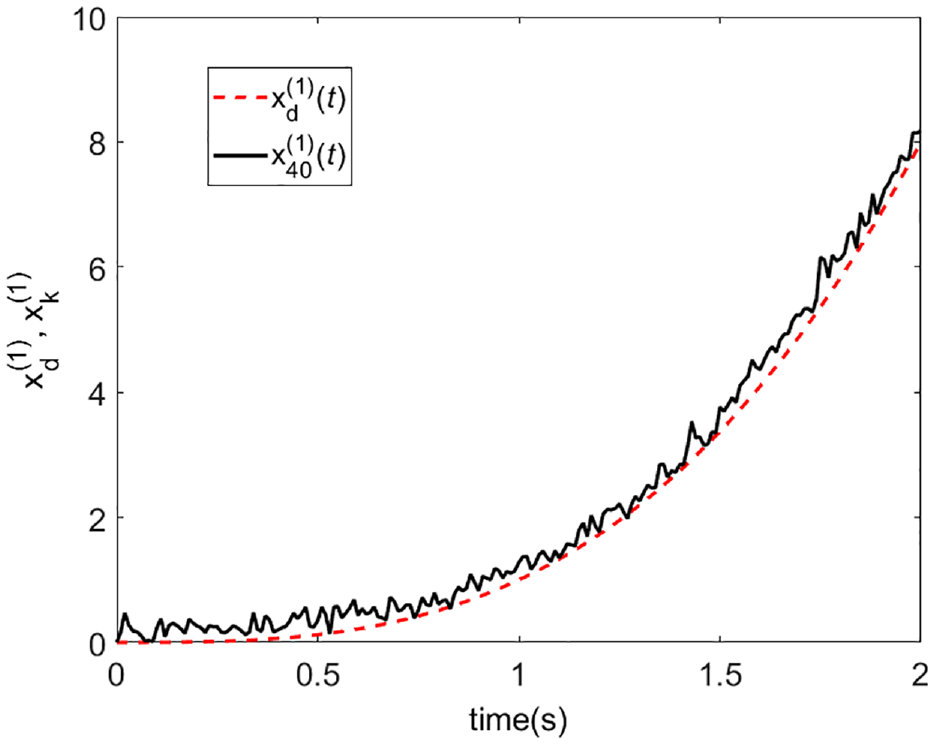
Tracking effect of x(1) via the fixed gain iterative learning algorithm at 40th iteration.
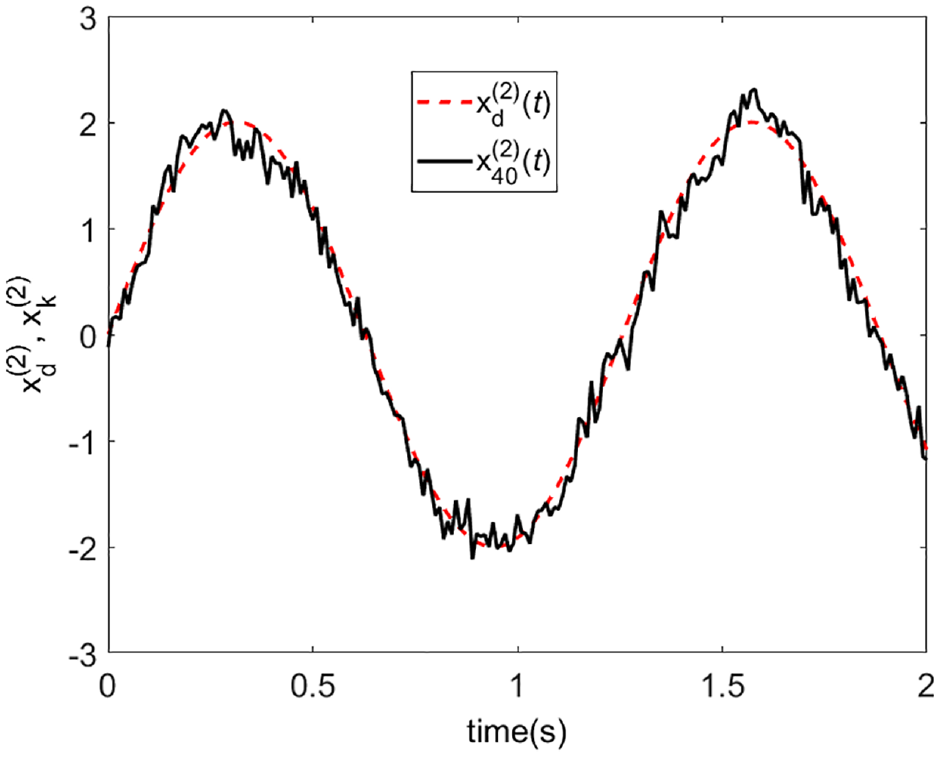
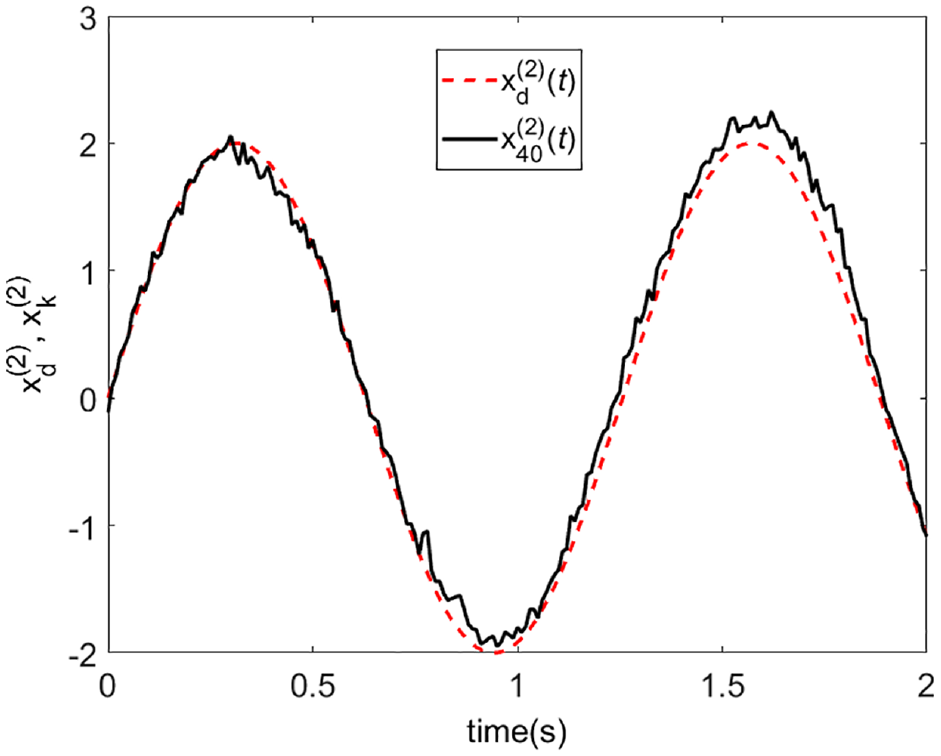
Tracking effect of x(2) via the fixed gain iterative learning algorithm at 40th iteration.
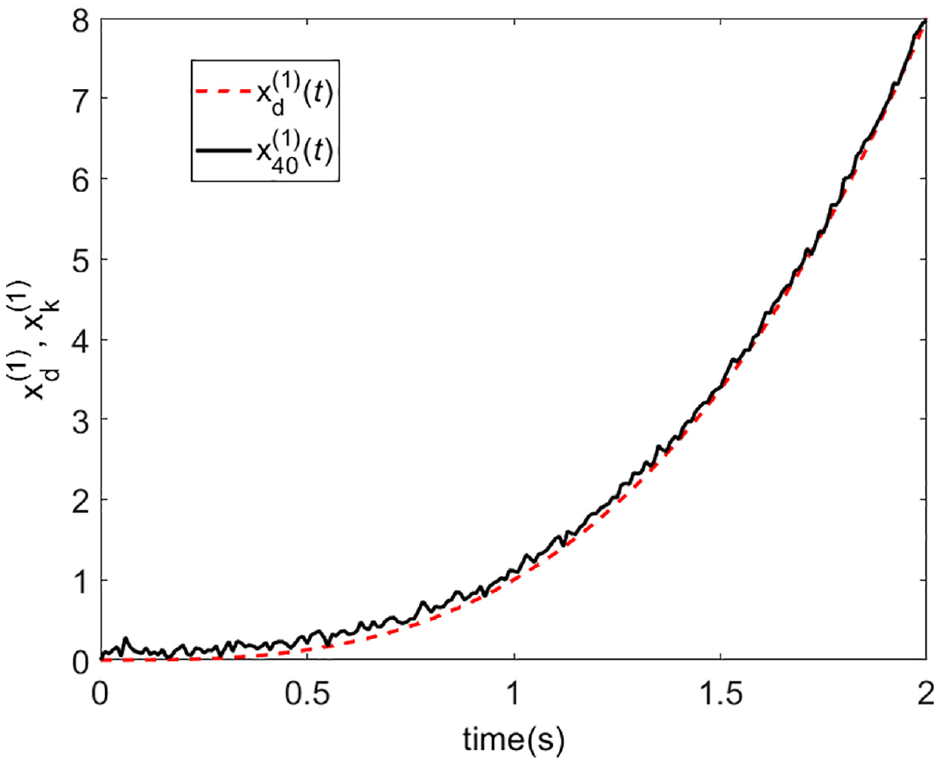
Tracking effect of x(1) via this algorithm at 40th iteration.
Tracking effect of x(2) via this algorithm at 40th iteration.
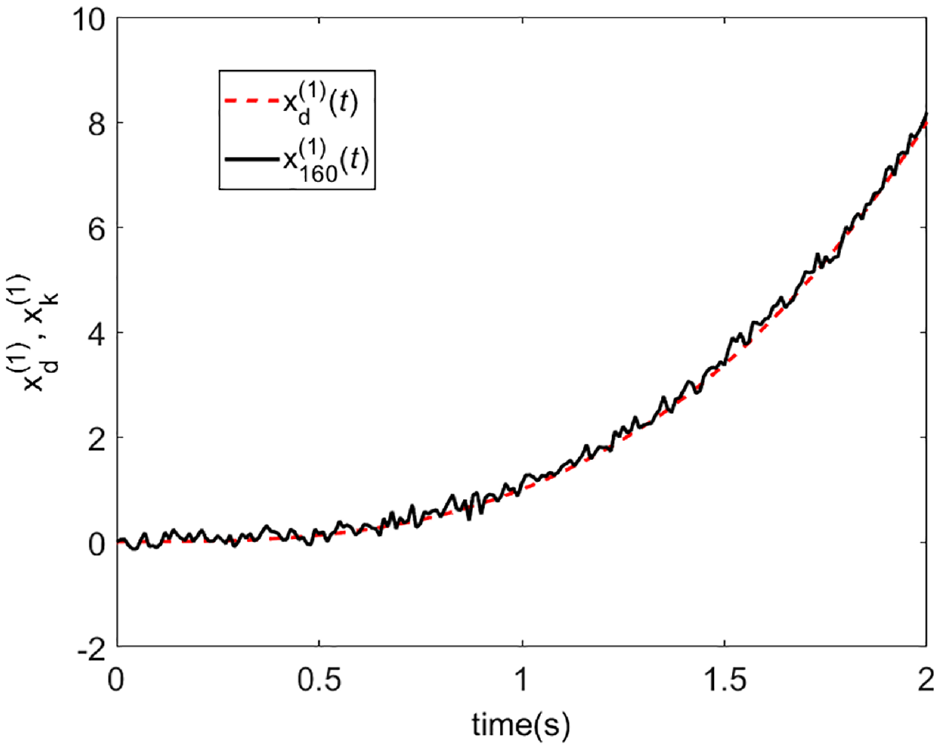
Tracking effect of x(1) via the fixed gain iterative learning algorithm at 160th iteration
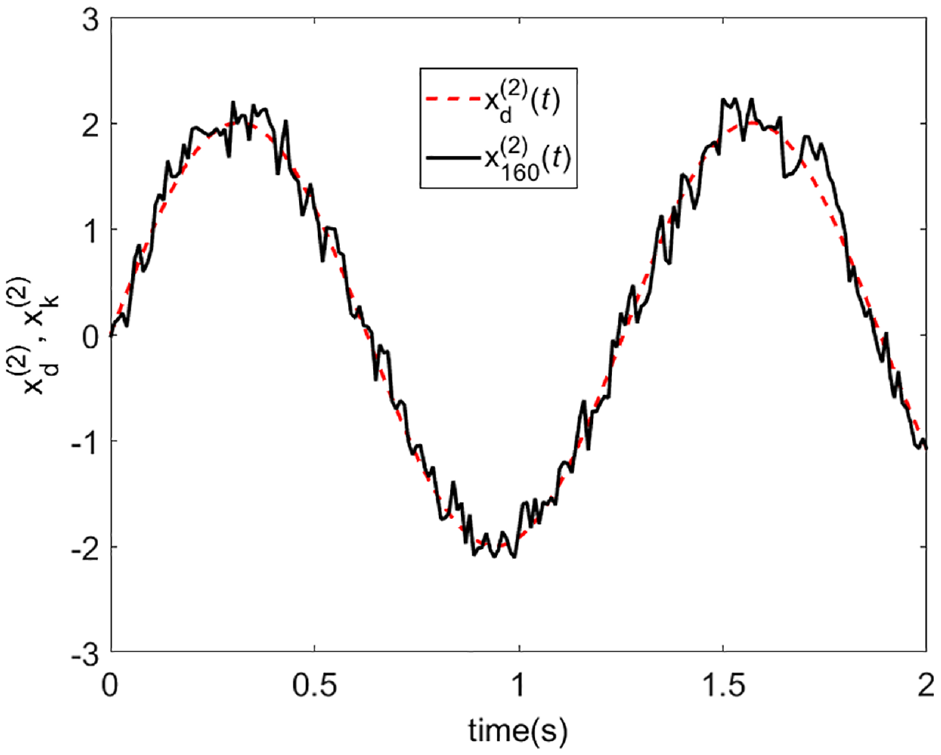
Tracking effect of x(2) via the fixed gain iterative learning algorithm at 160th iteration.
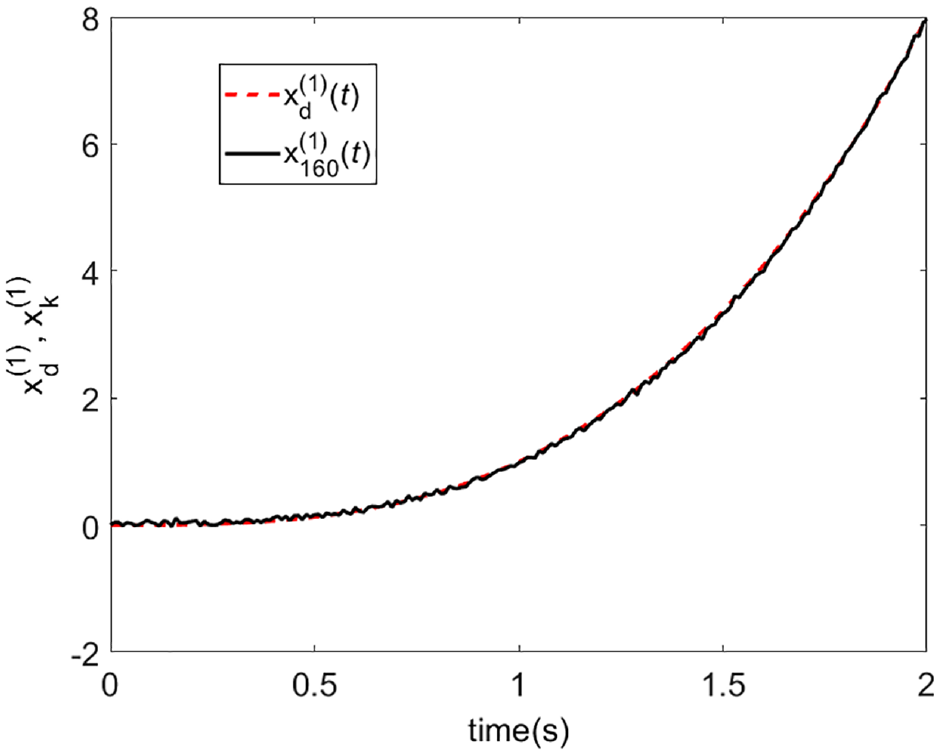
Tracking effect of x(1) via this algorithm at 160th iteration.
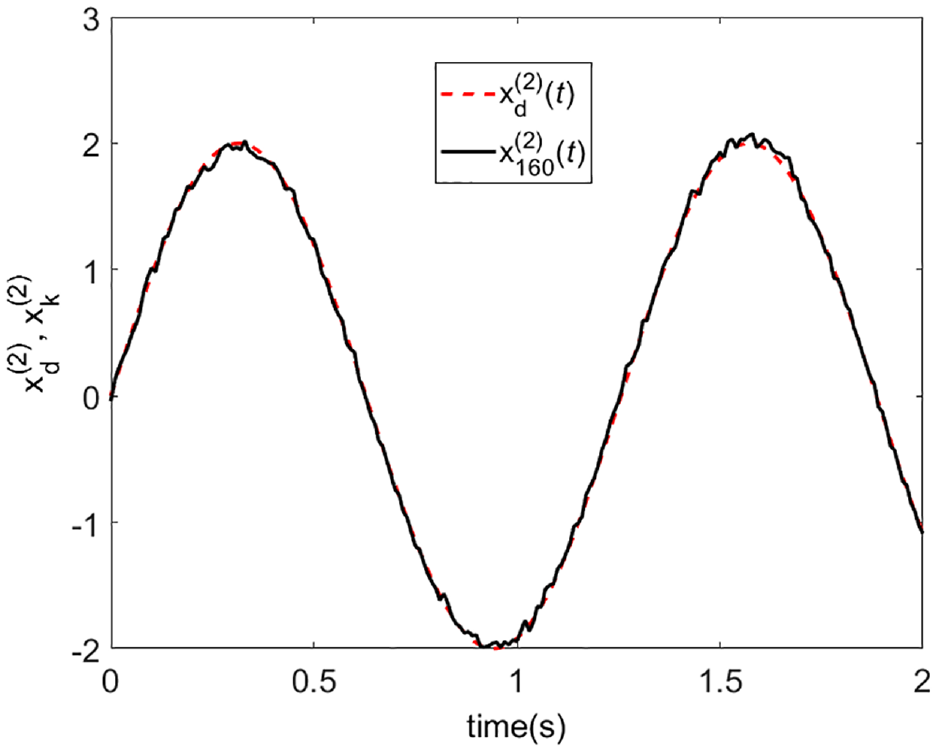
Tracking effect of x(2) via this algorithm at 160th iteration.
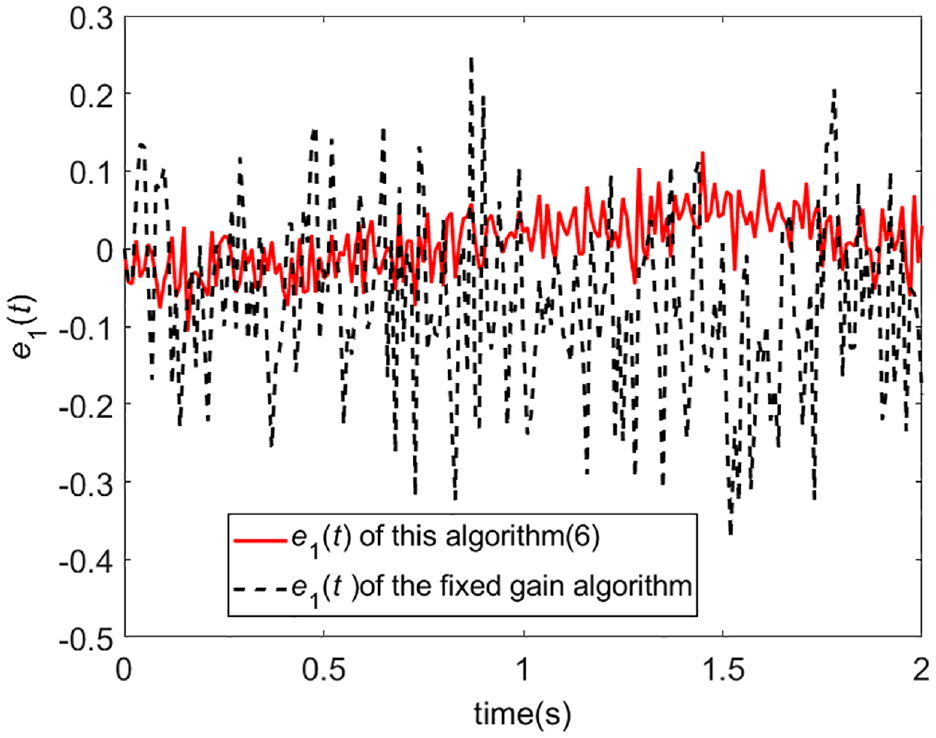
Tracking errors of x(1) via this algorithm and the fixed gain algorithm at 160th iteration.
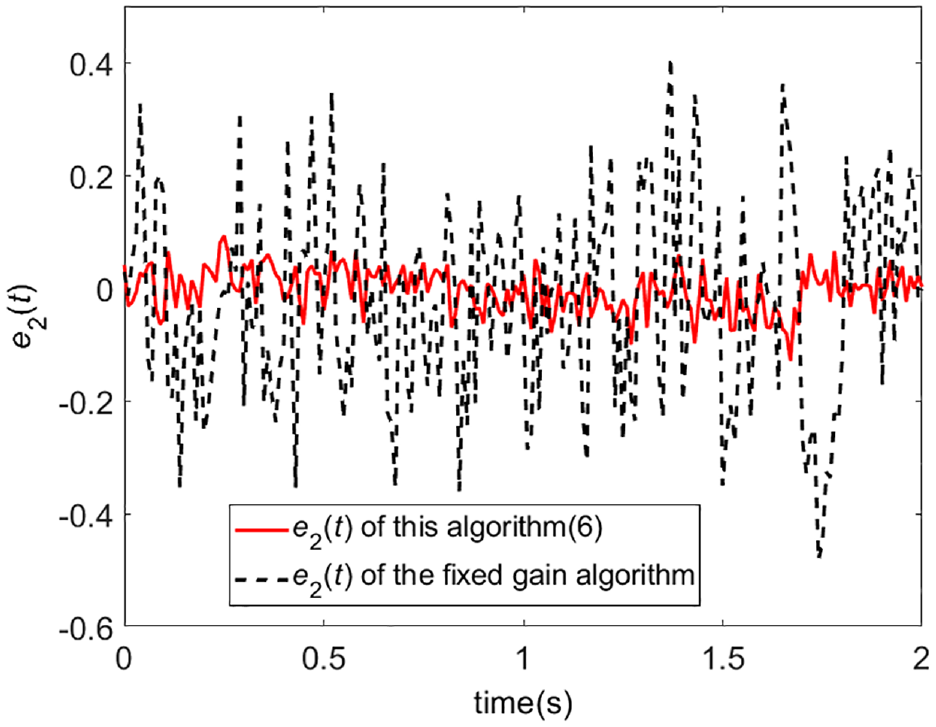
Tracking errors of x(2) via this algorithm and the fixed gain algorithm at 160th iteration.
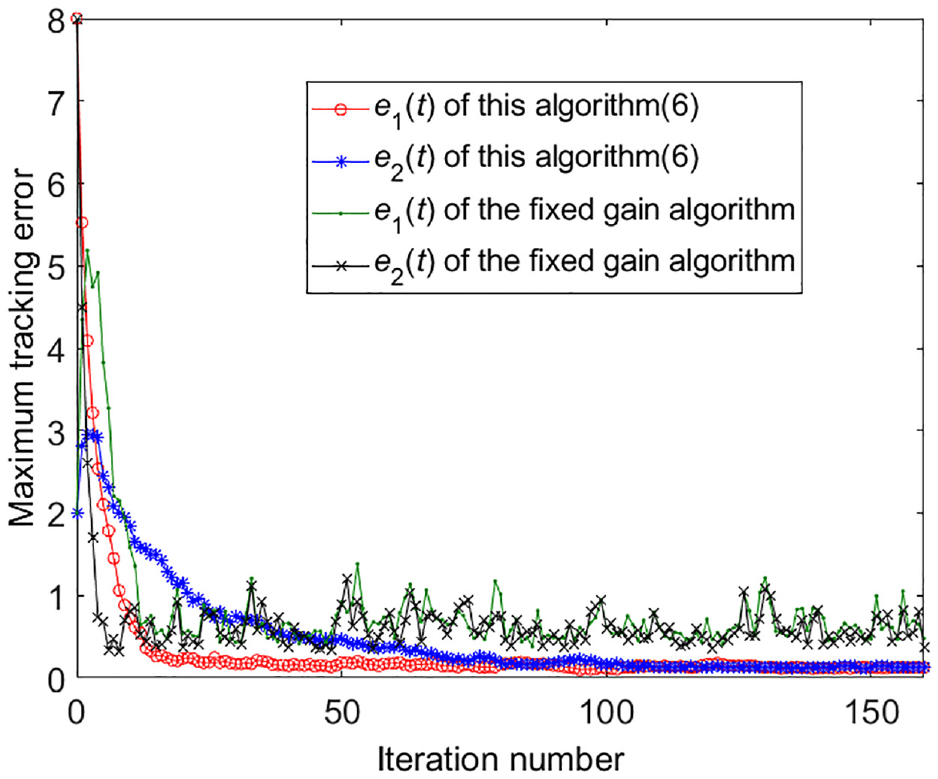
Maximum tracking errors via this algorithm and the fixed gain algorithm at each iteration.
In order to better see the change of the control signal, Figure 15 shows the control input of a switched singular system with random switching and measurement noise. Due to the influence of measurement noise and random switching, chattering also exists in the control signal.
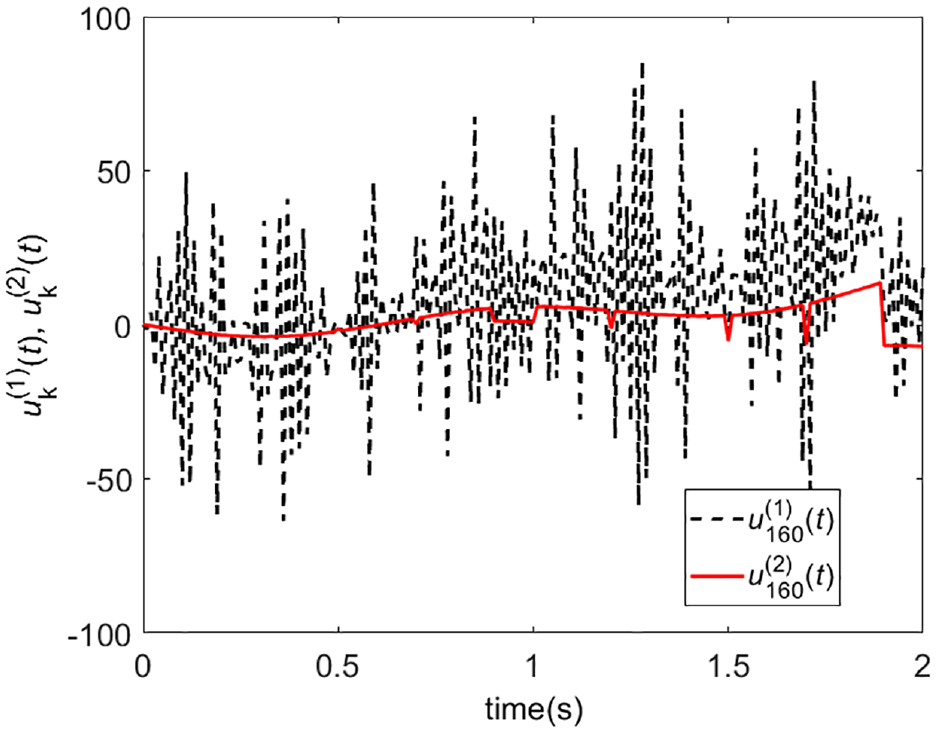
Control input of the singular system with random switching and noise.
From Figures 4and 5 and 8 and 9, it can be seen that when the fixed gain iterative learning control algorithm is adopted for switched singular systems with measurement noises, the state curve gradually approaches the desired trajectory with the increase of the number of iterations, while the effect of measurement noises does not change. However, it can be seen from Figures 6 and 7 and 10 and 11 that when using the robust iterative learning control algorithm (6) designed in this paper, not only the system state can gradually approach the desired trajectory with the increase of the number of iterations, but the influence of measurement noises is gradually reduced, thus the tracking accuracy is improved. The reason is that a coefficient decreasing gradually with the increase of the number of iterations is added before the state measurement error in the algorithm (6). Therefore, the measurement noise can be gradually reduced with the increase of the number of iterations, realizing the improvement of the tracking accuracy. At the same time, it can also be seen from Figures 12 and 13 that the tracking accuracy of algorithm (6) is significantly higher than that of fixed gain algorithm. And Figure 14 shows that the convergence effect of the tracking errors of the algorithm (6) along the iterative axis is better than that of the fixed gain algorithm.
Conclusions
The paper has discussed a state tracking problem for switched singular systems affected by measurement noises, and presented a robust iterative learning control algorithm with the composition of state error derivative of slow subsystem and state error of fast subsystem. At the same time, based on the λ-norm theory, the convergence of the system is strictly proved, and the sufficient condition is derived. The research results show that this algorithm can effectively reduce the influence of measurement noises on the state tracking accuracy with the increase of the number of iterations, and achieve the purpose of complete tracking of the system state on the desired trajectory in a finite time interval. Compared with the fixed gain iterative learning control method, the simulation results also verify that the tracking accuracy of the proposed algorithm is significantly improved. However, this paper requires that the initial state of the system is the same as the desired initial state, so that complete tracking can be achieved. This initial condition is too strict. In order to further relax the restriction of this initial condition, we can continue to study the case that the initial state is random in the future research work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under Grant No (71803095); Humanity and Social Science Youth Foundation of Ministry of Education under Grant No (18YJC790130); Natural Science Foundation of Heilongjiang Province under Grant No (LH2020G009); Fundamental Research Funds in Heilongjiang Provincial Universities under Grant No (145109155).