
Abstract
This paper is concerned with the problem of a wheel slip ratio constraint control for the Antilock Braking System (ABS) with external interferences and state constraints. A quarter vehicle braking model with uncertainties is considered, and a constraint control method based on Tangent Type Barrier Lyapunov Function (Tan-BLF) is designed. In addition, due to the selection of the appropriate adaptive control rate, the designed control method can quickly track the ideal slip ratio and ensure that the slip ratio for ABS is always constrained in the stable region even if there are uncertainties in the control system and unknown external disturbances. The simulation results show that the control scheme proposed in this paper, compared with the traditional QLF controller scheme, can make the vehicle wheel slip rate stable at the optimal value early and keep it in the optimal range from the beginning of the simulation, thus reducing the braking distance and braking time of the vehicle, which means that the vehicle can avoid wheel locking. And the adaptive rate is always bounded.
Introduction
As an essential part of the vehicle, an Anti-lock braking system can prevent the wheel from being locked to ensure the control stability, steering ability, and safety of the vehicle. 1 The research on ABS mainly focuses on control algorithm, control stability, response time, control target selection, etc. The main issue of ABS is how to choose a suitable algorithm matching the vehicle dynamics nonlinearity and appropriate control target variables. 2 Lots of ABS control methodologies have been introduced, such as feedback linearization, 3 fuzzy logic, 4 neural network, 5 the problem of extremum seeking, 6 hybrid control,7–9 and SMC,2,10,11 etc.
Aiming at the highly nonlinear interaction between tire and road and the uncertainty of vehicle dynamics in ABS, a non-linear control design using input-output feedback linearization approach was proposed in John and Pedro. 3 In this paper, an integral feedback method was employed to enhance the robustness of the non-linear controller. Based on fuzzy control theory, Aksjonov et al. proposed a control algorithm integrating ABS and ESP for vehicle stability control in complex braking operations. 4 And the algorithm was applied to a sport utility vehicle (SUV) to verify the braking performance on different roads. Considering the highly nonlinear interaction between tire and road and the unknown uncertainties arising from changing of the vehicle parameters and un-model dynamics, a novel robust prediction-based controller for ABS was proposed in Mirzaeinejad. 5 An optimal control law was designed for ABS using nonlinear predictive method and the unknown uncertainties were adaptively approximated utilizing a radial basis function neural network. Zhou et al. proposed a new control algorithm of ABS based on the sliding mode extremum-seeking algorithm. 6 The algorithm adopted the extremum-seeking algorithm as a self-optimization routine to seek the peak point of the tire braking force-slip rate curve and used the sliding mode variable structure control method to quickly approach the peak value. To ensure the braking stability of hybrid electric buses and maximize braking energy recovery, literature 7 proposed an efficient energy recovery control strategy based on the improved nonlinear model predictive control method. Considering the nonlinear characteristic of the vehicle model and the efficiency of the regenerative braking system, particle swarm optimization algorithm in the improved nonlinear model predictive control was used to optimize the torque distribution between regenerative braking system and wheel pneumatic braking system. A coordinated control algorithm of the regenerative braking system and the ABS in the hybrid vehicle(HEV) was proposed in Xu et al. 8 A braking force distribution strategy was designed based on predictive control algorithm to optimize operating efficiency and ensure the vehicle brake slip rate. An ABS system applied to an ABS simulator using electromagnetic braking is designed in Pramudijanto et al. 9 A neuro fuzzy method was designed to control the wheel slip rate.
Strong nonlinearity has become a critical issue in the design of the ABS controller. 12 As a nonlinear control algorithm, sliding mode control changes the dynamic characteristics of nonlinear systems by using discontinuous control signals. The sliding mode control algorithm has become the preferred scheme of ABS controllers because of its robustness to parameter changes and external disturbances. Tang et al. proposed an adaptive fuzzy fractional-order sliding mode controller design method that combined the fractional-order sliding mode controller (FOSMC) and fuzzy logic controller (FLC). 10 In the method, the sliding surface was PDα based on fractional calculus (FC) and was more robust than conventional sliding mode controllers. He et al. proposed a combining sliding mode control (cSMC) approach of electric motor anti-lock braking system (emABS) to improve braking stability of battery electric vehicle (BEV) in He et al. 2 The control laws of wheel deceleration and slip ratio were designed based on sliding mode control (SMC) algorithm. Because the wheel deceleration was accurately measured at the beginning and the slip rate was accurately calculated in the stability control stage, the wheel deceleration control system had fast transient response, and the slip rate was more stable in the stability control stage. A disturbance observer (DO) in conjunction with sliding mode control was proposed to improve the vehicle stability during braking in Chaudhari et al. 11 The effect of uncertainty and disturbance from the ABS system was estimated and compensated and the sliding mode control was proposed to track the desired slip ratio, which maintained the desired slip ratio for different runway surfaces and different runway transition.
The slip ratio directly represents some information of ground adhesion, so the slip ratio is critical to the braking performance of ABS. In fact, the curve of slip rate and road adhesion coefficient can be divided into stable and unstable areas. When the braking system makes the slip ratio work in the unstable area, the vehicle will not obtain the maximum braking force, the tire does not have enough “grip” and the wheel will slip, lock, and other situations. However, the above paper mainly focuses on improving the control accuracy and does not consider the constraint of slip ratio. Therefore, considering the slip rate constraint problem, designing a slip rate constraint controller to ensure that the slip rate always works in the stable region is of great significance to improve the braking performance of ABS.
Until now, constrained control algorithms have been investigated by some researchers. The existing constraint control methods mainly include: set invariance principle,13,14 command governor,15,16 reference governor,17,18 extremum seeking control, 19 model predictive control,20–23 etc. However, there are some limitations in these algorithms. For example, only when the initial state is constrained within the invariant set input and state constraints can the state constraints satisfy the set invariance principle. The reference governor is to meet the constraints by modifying the target reference signal to the controller, and its reference signal needs to be calculated by the online optimization algorithm. MPC can solve most constrained control problems and has a good processing effect for linear systems. However, when the system is extended to nonlinear systems, or there are uncertain parameters and robustness problems in the control system, MPC will have problems in theoretical calculation due to the complex control structure. It greatly increases the design difficulty and workload of the control system, reduces the real-time performance, and is not conducive to the practical application of the project.
Unlike the above constraint control algorithm, Ngo et al. 24 initially elaborated the concept of Barrier Lyapunov Function (BLF) and applied it to the design of a control system with state variable constraints. As the controller design method based on Lyapunov Function is not limited to the specific form of system solution, it is widely favored by many researchers.25–30 For a class of special nonlinear systems with the hysteretic output mechanism and the unmeasured states, Liu et al. proposed an adaptive neural output-feedback control method, which introduced a barrier Lyapunov function technique to guarantee the prescribed constraint of the tracking error. 25 Tang et al. designed a controller with strict feedback form for single input single output nonlinear systems. The barrier Lyapunov function is used to realize the asymptotic tracking of the expected value without violating the constraints. 26 Niu and Zhao Studied the output constraint tracking control problem of lower triangular nonlinear switched systems. When all state variables are constrained, the obstacle Lyapunov function is used to prevent all States from violating the constraints. 27 Tee et al. designed a time-varying Barrier Lyapunov Function (TBLF) controller for strictly feedback nonlinear systems, which incredibly overcame the dependence of time on state output. It can arbitrarily restrict tracking error and relax the requirements of initial value conditions. 28 For a class of stochastic nonlinear systems with output constraint and unknown control coefficients, adaptive neural output-feedback tracking control algorithm was addressed in Shen et al. 29 A tan-type barrier Lyapunov function (BLF) was employed to meet output constraint requirements of stochastic systems, which ensured that the system output trace error was not violated during the operation in the sense of probability. For a class of uncertain MIMO nonlinear systems, Liu et al. proposed an adaptive neural network control algorithm based on a new integral type Barrier Lyapunov Function to solve the problem of state constraints. 30 The proposed algorithm can ensure the boundedness and tracking performance of the closed-loop system. In Jin, 31 a new tan type Barrier Lyapunov Function was adapted to constrain the performance of tracking error in the stability analysis of the control system, which achieved the specified tracking performance requirements while ensuring the feasibility of the controller. An essential feature of the tangent type Barrier Lyapunov Function (Tan-BLF) is that when the bound of the constraint error becomes infinite, the tan type Barrier Lyapunov Function(Q-BLF) is equivalent to the quadratic type Barrier Lyapunov Function. In other words, Q-BLF is a particular case of Tan-BLF. Then, Jin proposed an iterative learning control algorithm using the Tan-BLF to solve the trajectory tracking problem of mobile robots with distance and angle constraints. 32
In summary, the slip ratio constraint problem is rarely considered in the aforementioned studies in ABS. Although an ABS slip ratio constraint controller based on BLF was designed in He et al., 33 the change of moment of inertia was not considered, which is the actual problem of the vehicle system. Motivated by the papers mentioned above, this paper proposes a slip ratio constraint control algorithm based on Tan-BLF. The main contributions of this paper can be summarized as follows:
(1) The wheel slip ratio constraint control problem for ABS is considered to ensure that the slip ratio for ABS is always constrained in the stable region, which means that the vehicle can avoid wheel locking.
(2) To ensure that the model is closer to the actual system, the longitudinal interference of the vehicle, unknown interference of wheels, and change of moment of inertia are considered to ensure the model.
(3) The Tan-BLF is applied to the design process of the constrained controller to reduce the difficulty of constraint controller design. At the same time, the problem of unknown controller direction is solved by the proposed adaptive control scheme.
The rest of this paper is organized as follows. In Section 2, the quarter vehicle model modeling is described. The proposed wheel slip ratio constrained controller is designed in Section 3. Simulation results are presented in Section 4, followed by conclusive remarks in Section5.
Problem formulation
Problem description
The slip ratio is a physical quantity describing the degree of wheel slip. The wheel braking does not stop the wheel directly, but with the increase of the force applied by the wheel braking device, the motion state of the wheel gradually changes from pure rolling to rolling plus sliding, and then to pure sliding until it stops. To characterize the rotating motion state in the wheel motion state, the mathematical expression of slip ratio is as follows:

The adhesion coefficient
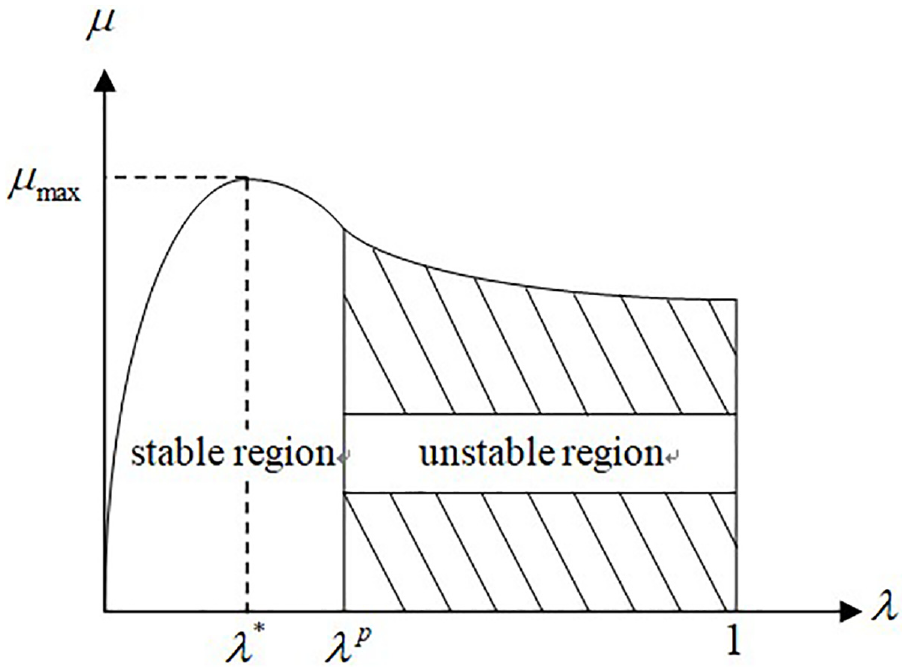
Relationship between adhesion coefficient and slip ratio.
As shown in Figure 1, the slip ratio is divided into two regions.
In the stable region, when the braking torque of the wheel braking device acting on the wheel is greater than the braking torque generated by ground friction, the wheel speed decreases, and the difference between speed and vehicle speed increases. It can be seen from formula (1) that the slip ratio increases, and the adhesion coefficient gradually increases. At this time, the motion state of the wheel is both sliding and rolling. When the slip ratio is in a stable area, the braking torque applied by the wheel braking device on the wheel is greater than the braking torque generated by ground friction. The wheel speed decreases, and the difference between speed and vehicle speed increases. According to formula (1), the slip ratio increases. When the slip ratio reaches abscissa
In the unstable region, when the braking torque of the wheel braking device acting on the wheel is greater than the braking torque generated by the ground friction, the wheel angular acceleration is opposite to its rotation direction. The wheel speed decreases. Accordingly, the slip rate increases, the adhesion coefficient decreases, and the final slip ratio tend to 1. When the slip ratio is 1, the wheel is in a pure sliding state, and the wheel locks. At this time, the vehicle’s braking efficiency is low, and the vehicle is unstable and dangerous.
Therefore, the purpose of this paper is to design the controller so that the actual slip ratio can quickly catch up with the ideal slip ratio in the braking process to provide the best braking effect for the vehicle. At the same time, when the slip rate converges to the optimal value, its value can always be constrained in the stable region.
Quarter vehicle model modeling
Referring to He et al., 33 this paper selects a quarter car model shown in Figure 2.
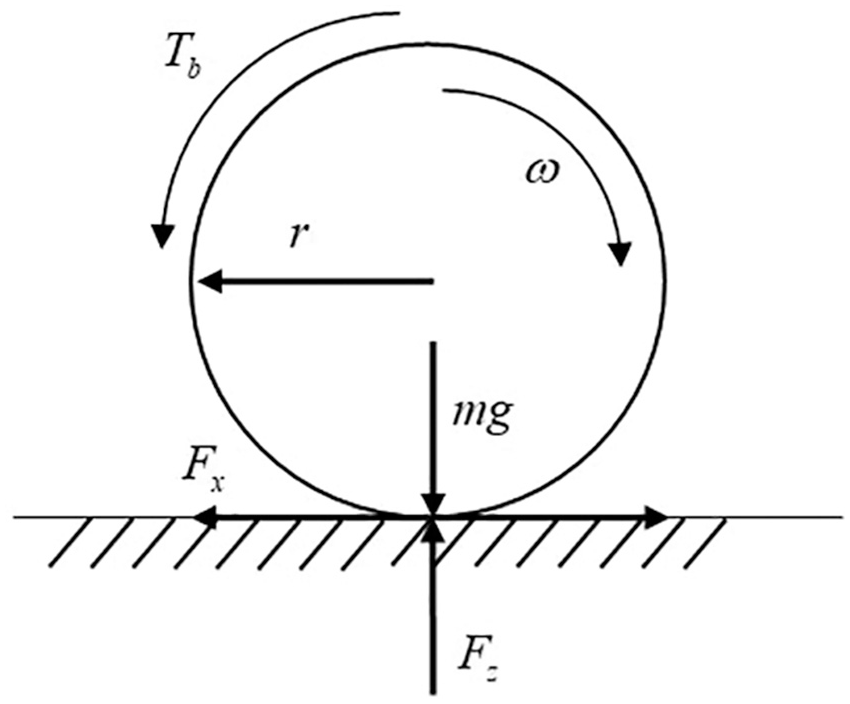
Free body diagram of the quarter car model.
The dynamic equation considering longitudinal interference and unknown wheel interference is:

where
In this paper, the slip ratio of vehicle ABS is constrained.
Differentiating equation (1), we can have:

Substituting (2) into (3), we can have:
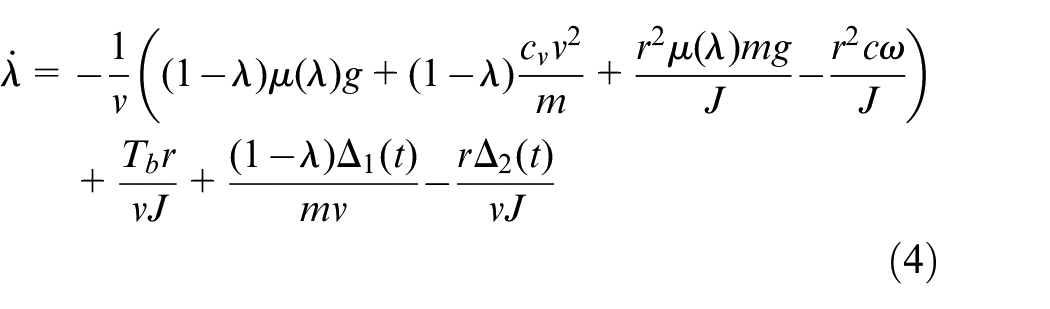
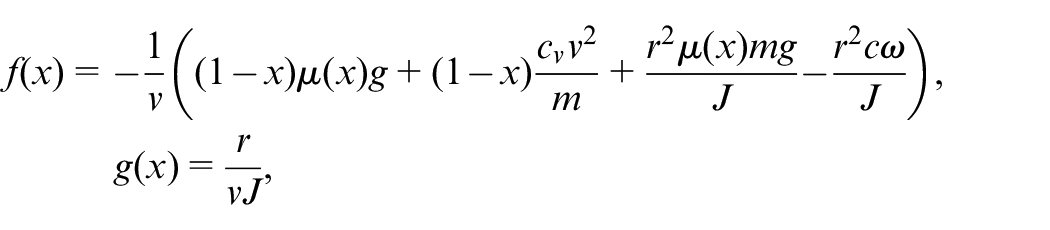
Define state variable

where
Controller design
For the above vehicle nonlinear model, we design a slip ratio constraint controller based on the tan-BLF to realize that the actual slip ratio can quickly track the ideal slip ratio without violating the slip ratio constraint.
For establishing constraint satisfaction and performance bonds, the following lemma is necessary.

where

where

in the set
Defining the fixed constraints

where
Define
where

Let
The control law is designed as:
where
Substituting (10) into (9), we can obtain

Considering the variation range of the moment of inertia mentioned above, the following projection algorithm is developed to make the control rate we designed meaningful.
Substituting (13) into (11), we can have
For the bounded interference of the system, the following adaptive law is designed:

where
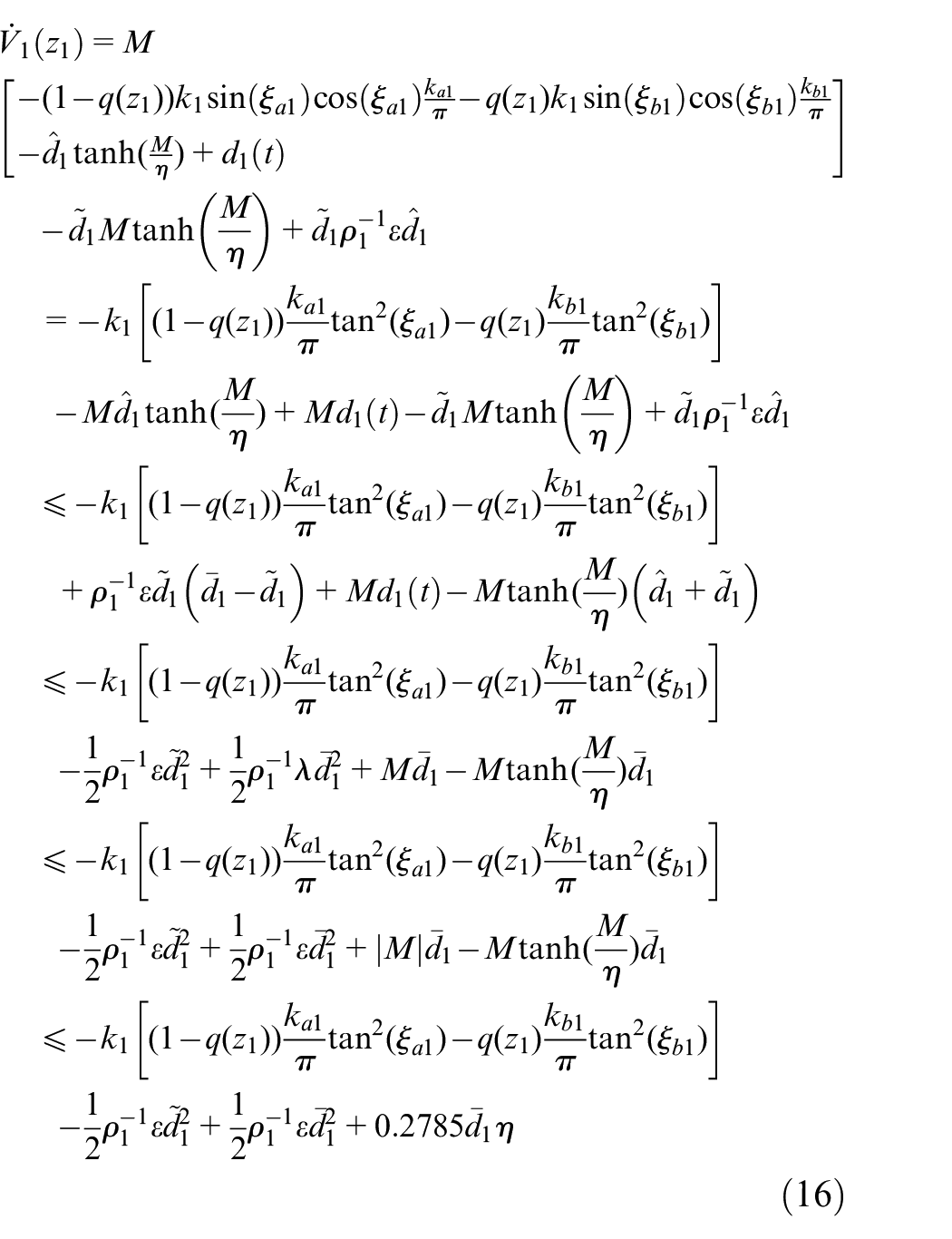
Substituting (15) into (14), we can have
Let

According to lemma 1, when the initial value of the system satisfies
Simulation analysis
In this part, simulation is carried out to verify the effectiveness of the proposed control algorithm.
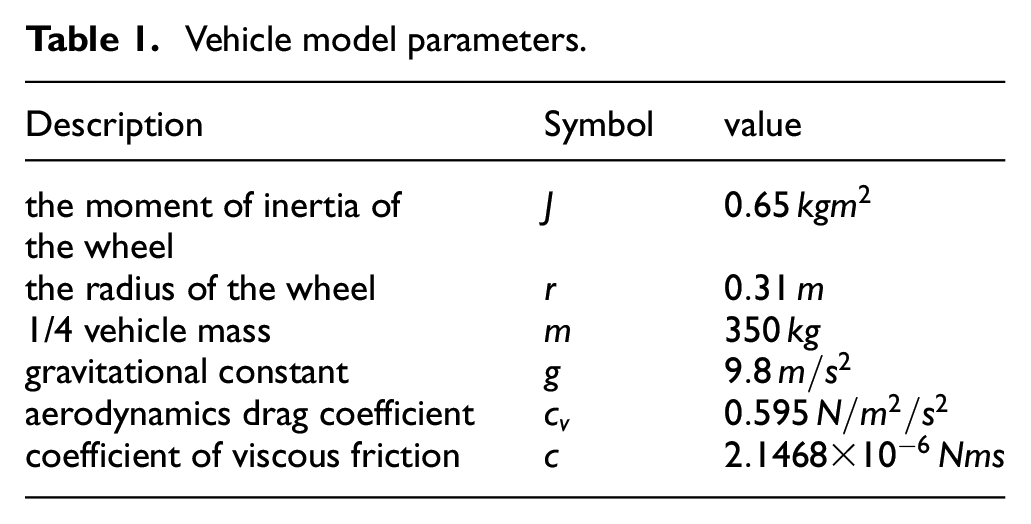
The main parameters 33 of the vehicle model are shown in Table 1 for a controller simulation analysis.
Vehicle model parameters.
In addition, as a 30% variation range is considered, the parameters of the projection algorithm are designed as

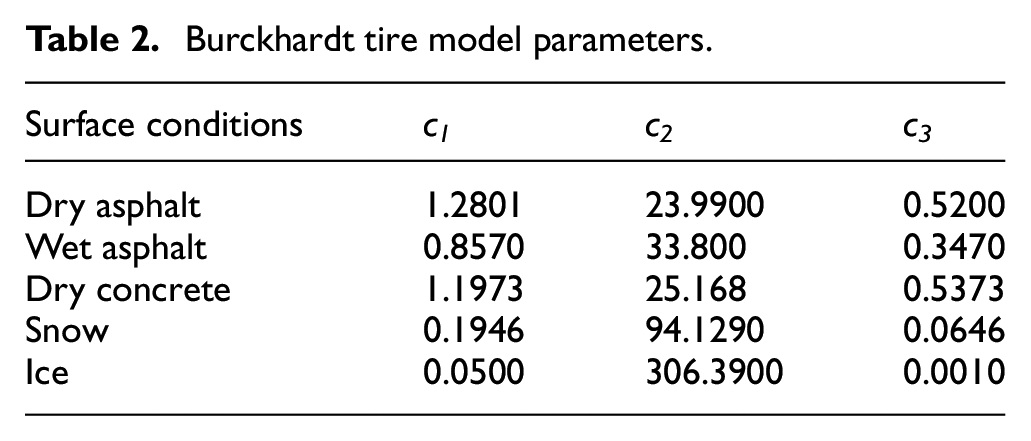
where
Burckhardt tire model parameters.
In this section, the simulation results are carried out for wet asphalt surfaces. The simulation program parameters are set as follows:
according to the determination of the optimal slip rate, the state constraints are as
To illustrate the effectiveness of the constraints of the designed control algorithm, the controller based on the Quadratic Lyapunov Function (QLF) is designed to compare with the algorithm in this paper. The simulation results are shown in Figure 3.
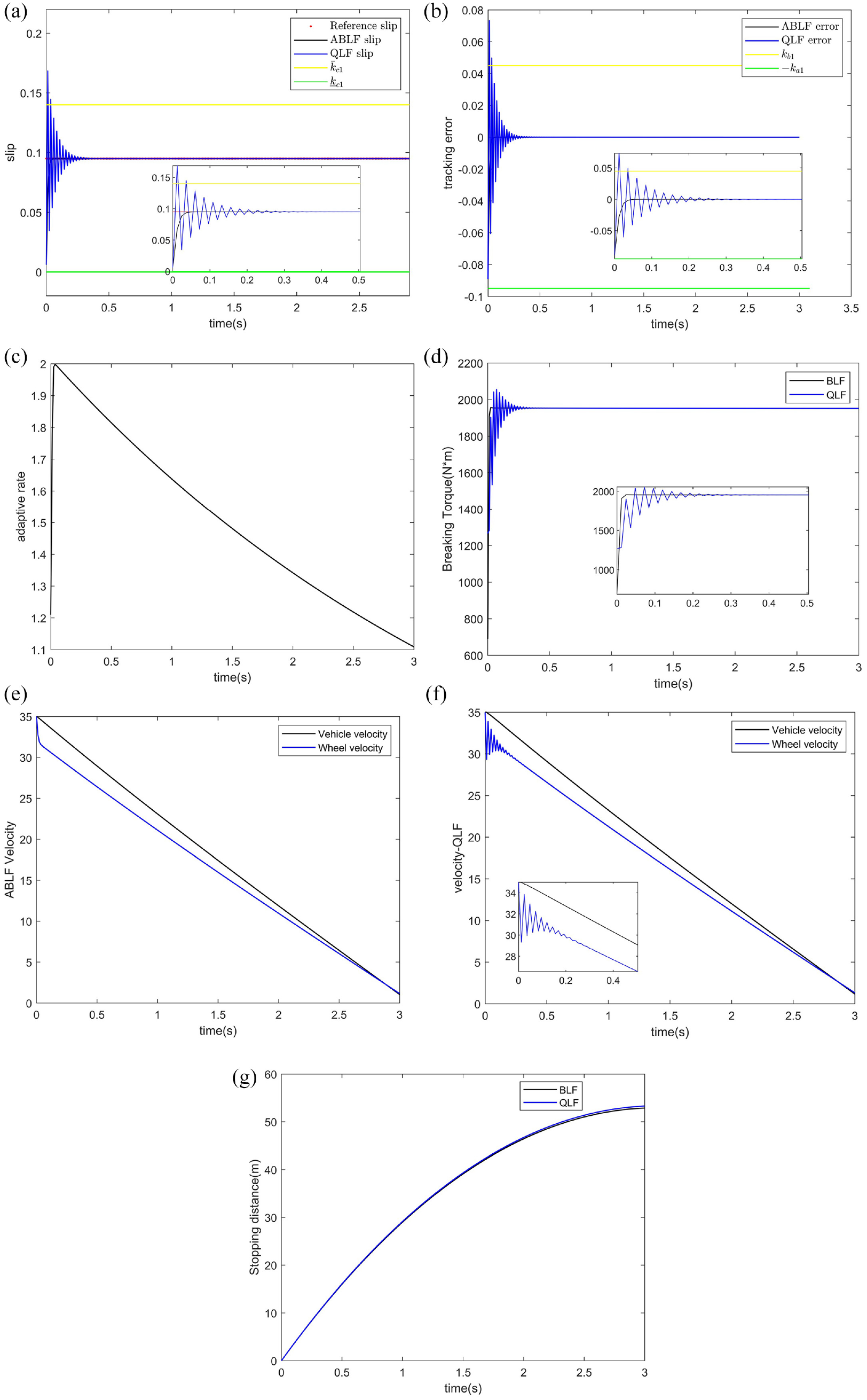
Simulation results on wet asphalt surfaces: (a) slip ratio, (b) tracking error, (c) adaptive rate, (d) braking torque, (e) velocity and wheel velocity on Tan-BLF, (f) velocity and wheel velocity on QLF, and (g) stopping distance.
From Figure 3(a), it can be seen that the convergence of the actual slip ratio is very rapid, and zero error tracking can be achieved at about 0.0480 s on the Tan-BLF controller. In the braking process, the vehicle slip ratio is constrained within the stable region, which means there is no risk of wheel locking. And in the whole braking process, the braking efficiency of the vehicle is in the best state to ensure the safety of vehicle braking. However, under the QLF controller, the slip ratio exceeds the constraint of the stable region at the beginning of braking (the slip rate is out of the stable range until 0.623 s, with a maximum value of 0.17 and a relatively serious oscillation), which means that the vehicle may have a risk of wheel locking and cannot ensure the safety of the braking process. Moreover, although the slip ratio can track the optimal value, compared with the Tan-BLF controller, the convergence time is longer, about 0.2520 s, and the tracking effect is not so well.
Figure 3(b) shows the comparison of tracking errors under the two controllers. Under the constraint control of the Tan BLF controller, the tracking error is within the corresponding error range in the whole braking process. But the tracking error of the QLF controller exceeds the preset range. Figure 3(c) shows the adaptive rate, which is convergent and bounded, indicating that the designed control system is closed-loop stable. Figure 3(d) shows the input comparison of the two controllers. As can be seen from the figure, the maximum input 1952 (
Conclusions
In this paper, a quarter vehicle braking model considering system interference and change of moment of inertia for ABS is established. A constraint controller is designed based on Tan-BLF to ensure that the slip ratio is constrained in the stable region. The designed controller based on Tan-BLF and the controller based on QLF are compared on wet asphalt surface by simulation. The simulation results show that the controller based on Tan-BLF can quickly approach the optimal slip ratio and ensure that the slip ratio is always constrained in the stable region. At the same time, compared with the controller based on QLF, the wheel speed has no oscillation under the controller we designed, which can improve the vehicle ride comfort and stationarity. In addition, the designed controller needs smaller braking torque and shorter braking distance, which can improve the performance of the vehicle braking system. The future direction of our work is to perform hardware-in-the-loop simulation or direct experiments on a real vehicle platform to further validate the effectiveness of the control algorithm.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by Jiangsu province road transport application Key Laboratory Fund (BM20082061506), Research start fund of Jiangsu University (15JDG125).