
Abstract
This study investigates a two-stage parameter identification algorithm for the Hammerstein nonlinear system based on special test signals. The studied Hammerstein nonlinear system has a static nonlinear subsystem represented by polynomial basis function and a dynamic linear subsystem described by canonical observable state space model, and special test signals composed of binary signals and random signals are applied to parameter identification separation of the nonlinear subsystem and linear subsystem. The detailed identification procedures consist of two main steps. Firstly, using the characteristics that binary signals do not excite the static nonlinear subsystem, the dynamic linear subsystem parameters are identified through recursive least squares algorithm based on input-output data of binary signals. Secondly, unmeasurable state variables of the identified system are replaced with estimated values, thus the nonlinear subsystem parameters are obtained using recursive least squares algorithm with the help of input-output data of random signals. The efficiency and accuracy of proposed identification scheme are confirmed on experiment results of a numerical simulation and a practical nonlinear process, and experimental simulation results show that the developed two-stage identification algorithm has excellent predictive performance for identifying the Hammerstein nonlinear state space systems.
Keywords
Introduction
Nonlinearity has always been one of the most challenging factors in identification modeling and identification of dynamical systems. In practical industrial processes, almost all process systems have certain degree of nonlinearity in conjunction with dynamical characteristic, which bring a certain degree of challenge into the system identification modeling and controller design.1–3 Also, the importance of the nonlinear dynamical systems is reflected in model prediction, classification, and decision making and so on. Over the last decades, a wide variety of effective modeling methodologies have been developed for approximating nonlinear systems, such as Volterra series, 4 neural networks,5,6 support vector machines, 7 fuzzy logic systems, 8 and block-oriented nonlinear systems.9–13 Among these developed modeling methods, the block-oriented systems have attracted a lot of interest owing to prominent modeling ability.
The Hammerstein systems, where a static nonlinear subsystem is followed by a linear time invariant dynamic linear subsystem in a cascade connection, represent the most common systems for the block-oriented nonlinear systems. Existing research results show that the Hammerstein systems have been successfully applied to model nonlinear systems in a variety of practical physical systems, for example chemical processes,14–16 control,17,18 electrical systems,19,20 and so on. In recent years, considerable amount of research has been devoted to the identification of the Hammerstein systems, and the identification strategies are overall classified into different types on the basis of different perspectives. From the perspective of fundamental identification principle, identification approaches mainly include least-squares-based identification algorithms,21–23 stochastic gradient-based identification algorithms,24–26 and maximum likelihood identification algorithms. 27 From the perspective of identification algorithms used, there exists three categories, namely, two-stage estimation algorithms,28–32 recursive-based estimation algorithms,33–38 and iterative-based estimation algorithms.21,22,29,30 On the basis of the perspective of supplementary means, mainly including multi-innovation principle, 39 particle filtering theory,40,41 and auxiliary model technique.42,43
State space systems have been successfully applied to parameter identification for a long history with many theoretical formulations.44–46 Gu et al. investigated a moving horizon estimation approach for multirate sampled-data system with unknown time-delay sequence, which realized simultaneously discrete time-delay sequence estimation and continuous state estimation. 44 In Ansari and Bernstein, 45 based on the generalized inverse of block-Toeplitz matrix, deadbeat unknown-input state estimation and simultaneous input reconstruction and state estimation for multi-input multi-output system are researched. In view of a kind of linear dynamic multirate sensors systems with correlated noise and stochastic unreliable measurements, Yan et al. studied the optimal distributed Kalman filter fusion algorithm. 46 The above existing works assume that the system studied is linear, on the contrary, most of the practical systems are subject to nonlinear characteristics.
Recently, some researches and scholars have expanded state space systems to the identification modeling of the Hammerstein nonlinear systems.47–49 Based on data filtering technique, Wang and Ding put forward a joint state variables and parameters estimation algorithm for input nonlinear state-space system with colored noise. 47 Considering process noise and measurement noise, a parameter estimation method for a class of single-input single-output Hammerstein nonlinear state space systems is put forward. 48 In order to jointly estimate the system parameters and states, using filtering technique and multi-innovation theory, Wang and Ding developed filtering-based multi-innovation stochastic gradient algorithm. 49 However, it should be noted that the above-mentioned literatures adopted over-parameterization method to identify the Hammerstein nonlinear system, that is, the mixed parameters of the nonlinear subsystem and the linear subsystem are obtained, and then parameter separation methods are used to separate the mixed parameters. Consequently, a direct impact is that a number of additional steps are required to determine separately the underlying nonlinear subsystem and linear subsystem. Meanwhile, it reduces parameter identification precision.
In this paper, considering both of the mechanical structure and the aforementioned nonlinear influence factors, a two-stage parameter separation identification algorithm for the Hammerstein nonlinear state space system based on special test signals are represented. For separation of nonlinear subsystem effect from linear subsystem, the special test signals composed of binary signals and random signals are designed to activate the Hammerstein nonlinear system.
The main contributions of this paper are as follows:
The Hammerstein nonlinear system is introduced to describe the input-to-output relationship with nonlinear characteristics using polynomial basis function and canonical observable state space model.
The special test signals are employed into realizing parameter estimation separation of the nonlinear subsystem and linear subsystem, thereby avoiding identifying redundant parameters of the system.
The developed parameter identification method can obtain less computation complexity and excellent accuracy compared with over-parameterization identification method.
The subject of this article is outlined as below. Section 2 gives modeling description of nonlinear subsystem and linear subsystem, the Hammerstein nonlinear state space system is introduced as a result here. Two-stage parameter separation identification algorithm based on special test signals are discussed in Section 3. The effectiveness and performance analysis of the identification method are reported in Section 4. Finally, this paper gives concluding remarks and future research work on the Hammerstein nonlinear state space system identification modeling.
Statement of the Hammerstein nonlinear state space system
The following Hammerstein nonlinear state space system is concerned with, which consists of a static nonlinear subsystem and a dynamic linear subsystem, as depicted in Figure 1.

Structure of the Hammerstein nonlinear state space system.
The Hammerstein nonlinear state space system defined in Figure 1, the relationships of the two subsystems are given by using mathematical expressions




in which
In this research, the nonlinear subsystem is described by polynomial basis function of given bases, and the output of the nonlinear subsystem is written as

where
For available observed data set, the developed Hammerstein system identification is to seek optimum parameters by minimizing the following loss function:
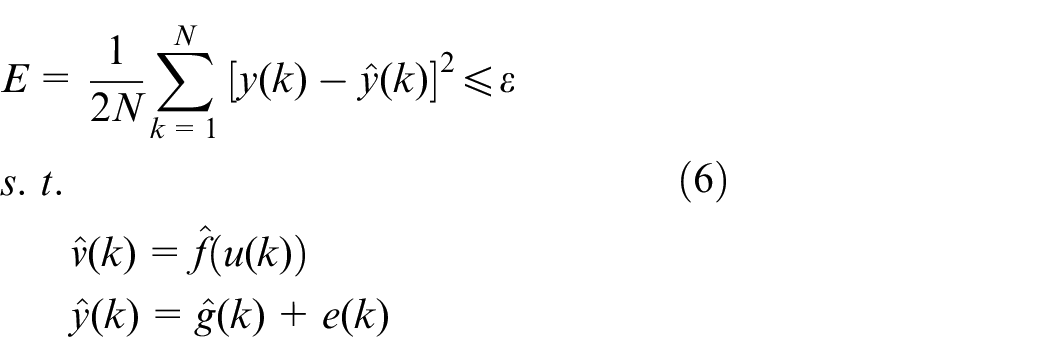
in which
Parameter identification of the Hammerstein nonlinear state space system
In this section, parameter separation identification procedures of the proposed Hammerstein state space system are presented in detail. In practical engineering applications, the intermediate variable of the Hammerstein system is not measurable, namely
Previous research results show that the Hammerstein process is identified by using binary signals,
50
which disclosed that for the binary input signals in Figure 2, after passing through the nonlinear subsystem, the intermediate variable
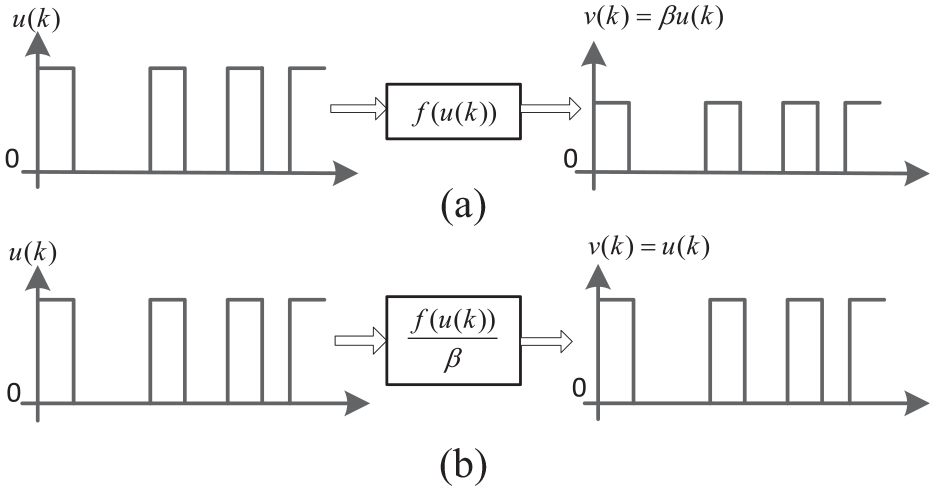
Input-output relation of nonlinear subsystem for binary signal.
In this research, based on the special test signals composed of binary signals and random multi-step signals, the studied two-stage parameter identification schemes are presented, as shown in Figure 3, in which the input and output of binary signals are
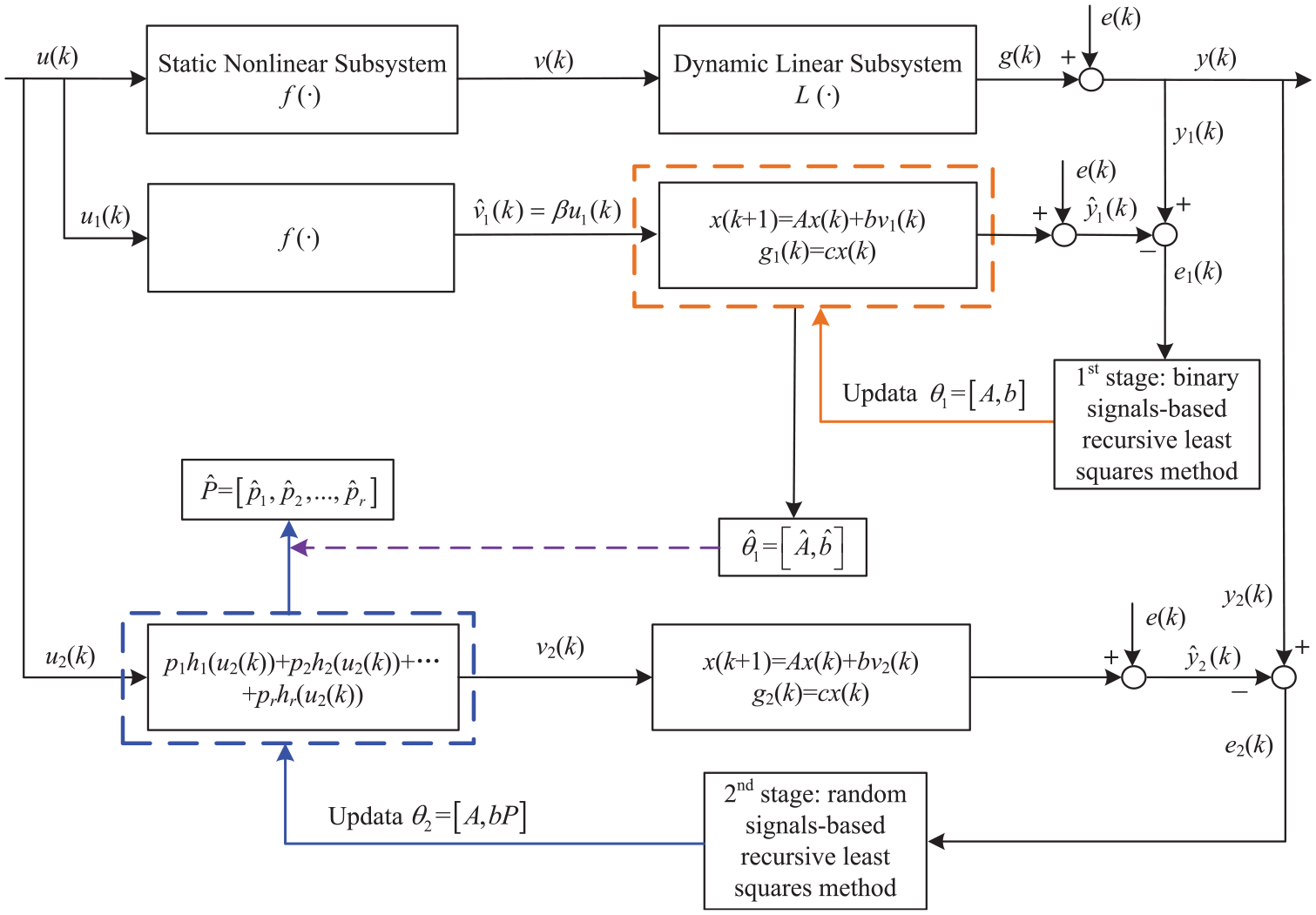
The studied two-stage parameter identification schemes.
Identification the dynamic linear subsystem parameters
Use the binary signals input


According to the characteristics of unit backward operator
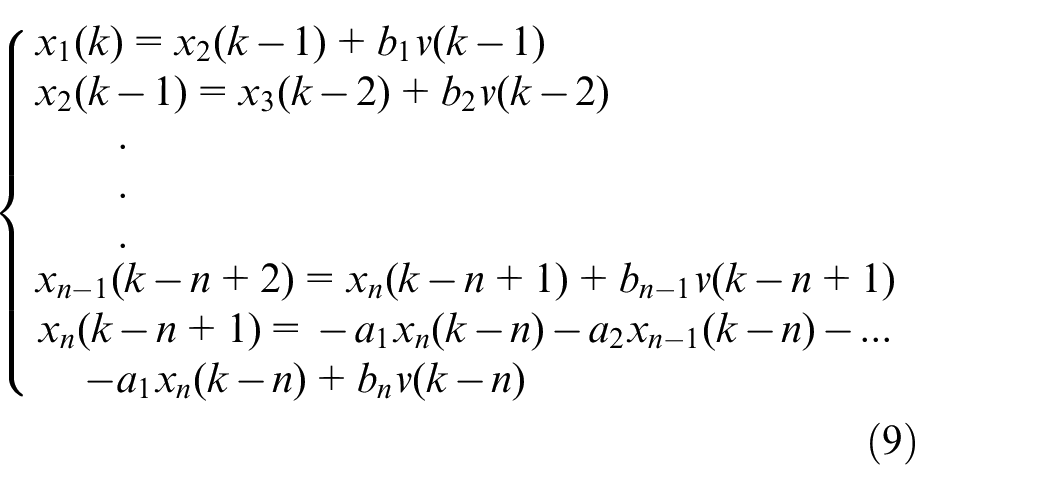
With the purpose of simplification, formula (9) are rewritten as
Based on formulas (3), (4), and (10), we can get the output of the Hammerstein system.
Use the properties of binary signals, the relationship between
where
Furthermore, a regression form can be achieved by using formula (12):

where
It should be emphasized that the state variables
Define the following criterion function:

The following recursive least squares method are used to realize the estimation of linear subsystem.




As a consequence, the parameters of the linear subsystem are obtained based on above discussion.
Identification the static nonlinear subsystem parameters
To estimate of the static nonlinear subsystem parameters, the random signals
Furthermore, a regression form can be achieved by using formula (19)

where
Define the following criterion function:

In view of the unknown state variables




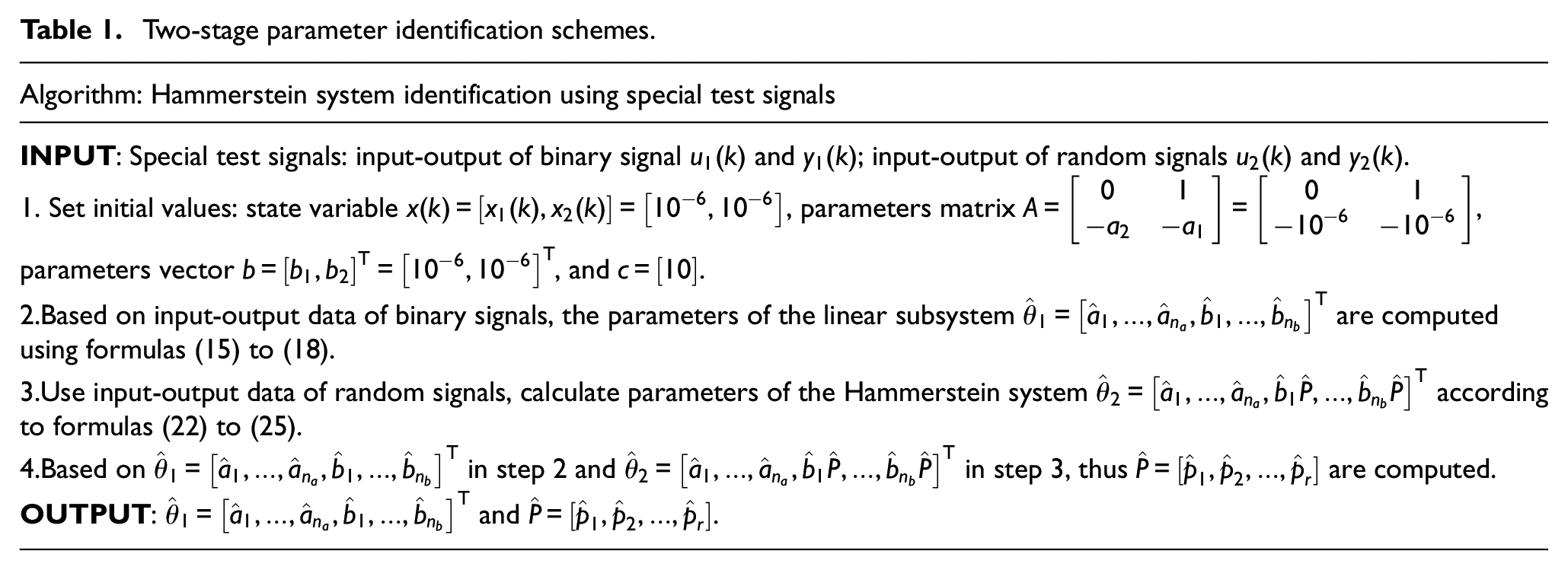
Based on the analysis of the above identification procedures, the studied two-stage parameter identification schemes using special test signals are summarized briefly in Table 1.
Two-stage parameter identification schemes.
Illustrative example
Example 1
The numerical case of the Hammerstein nonlinear state space system is offered to examine feasibility of presented two-stage identification method.
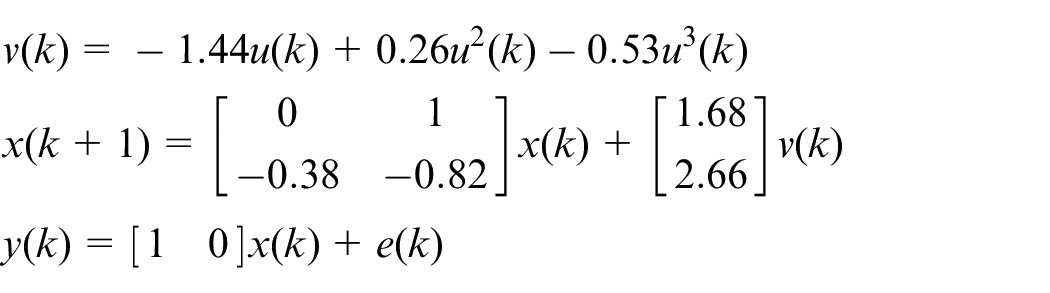
where
Define parameters estimation error of the linear subsystem as
The special test signals consist of 1000 binary signals with amplitude of 0 or 3 and 1000 random signals with amplitude of [−2, 2]. Partial input-output of the Hammerstein nonlinear state space system are displayed in Figure 4.
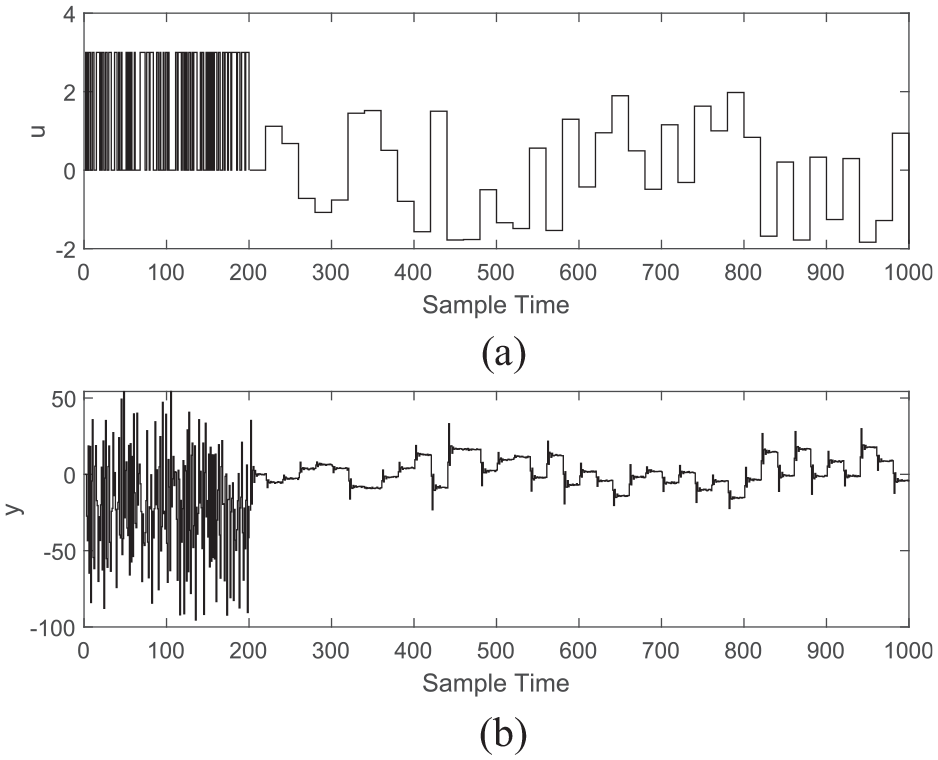
Partial input-output of test signals: (a) input signals and (b) output signals.
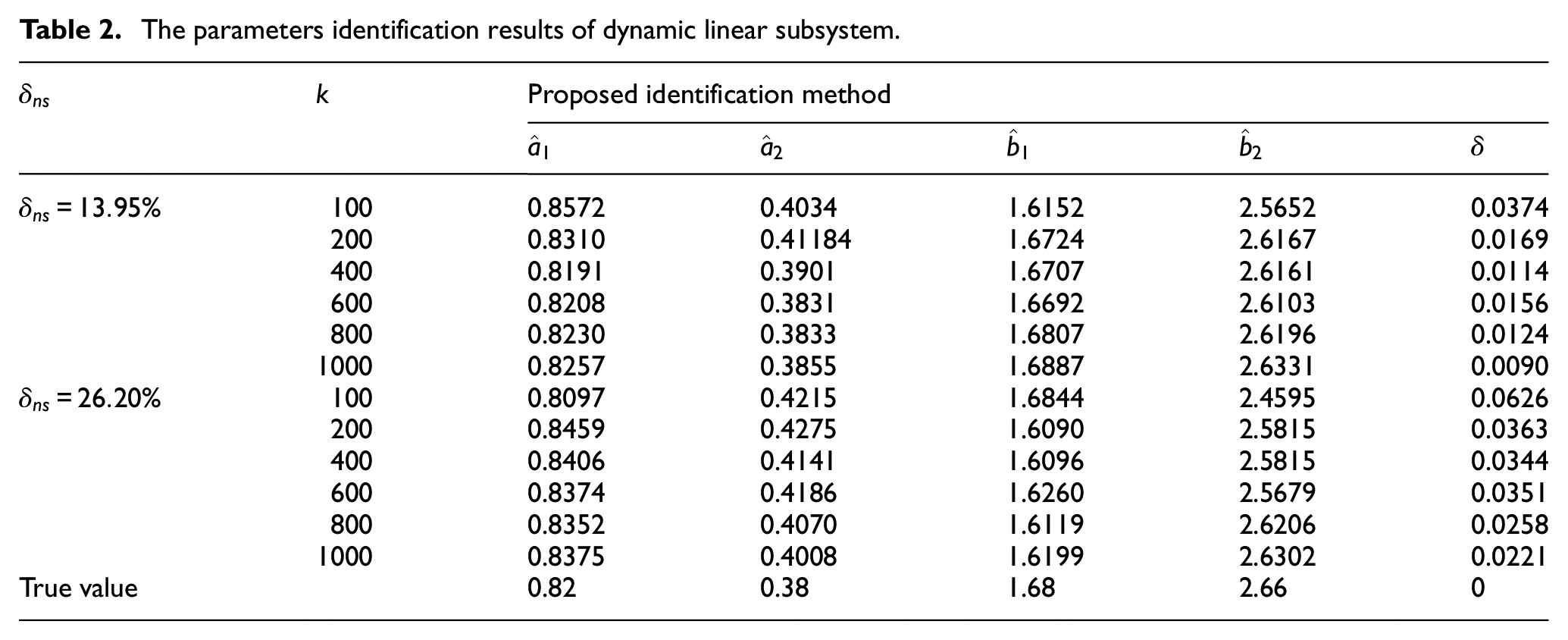
Binary signals input-output are adopted to identify dynamic linear subsystem parameters, Table 2 lists parameters identification results of linear subsystem and parameter estimation error under different
The parameters identification results of dynamic linear subsystem.
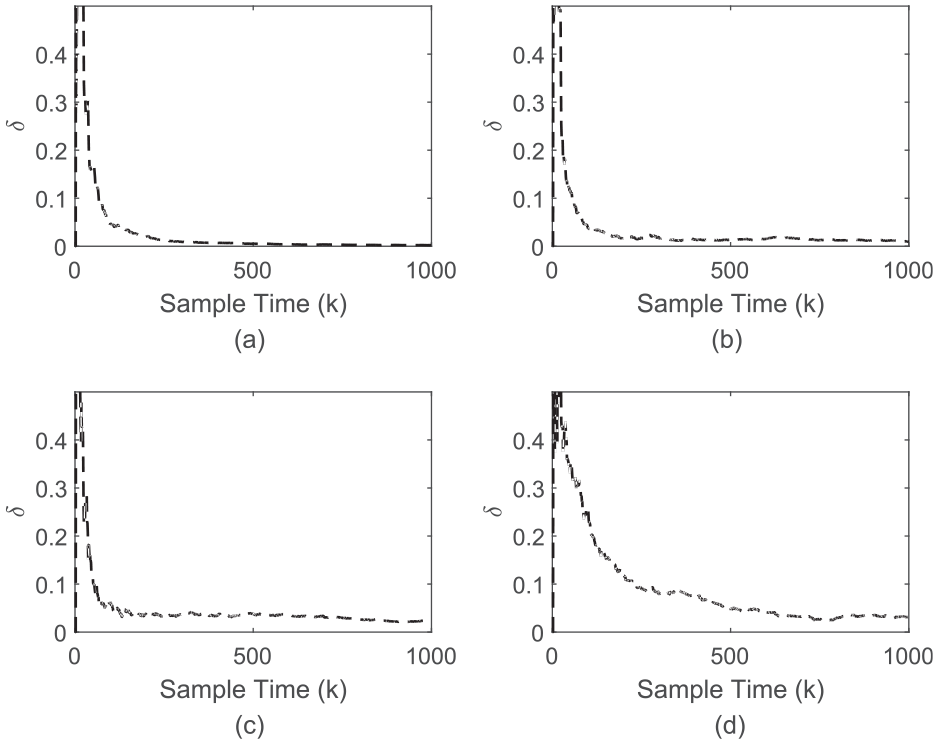
Parameter estimation error of different
From Table 2 and Figure 5, it can be seen that proposed identification scheme can effectively identify dynamic linear subsystem of the Hammerstein nonlinear state space system. To be specific, with increase of
In order to demonstrate the superiority of the proposed method, the gradient-based iterative algorithm (GI) 51 and the auxiliary model stochastic gradient algorithm with forgetting factor (AMSG-FF) 52 are also used to model nonlinear subsystem for the purpose of comparison. Based on input-output of random multi-step signals, approximation comparisons of nonlinear subsystems using three methods are displayed in Figure 6, and estimation results of polynomial model using two similar methods are given in Table 3. As shown in Table 3 and Figure 6, the developed two-stage identification algorithm can more effectively approximate the static nonlinear subsystems than the gradient based iterative algorithm and the auxiliary model stochastic gradient algorithm with forgetting factor.
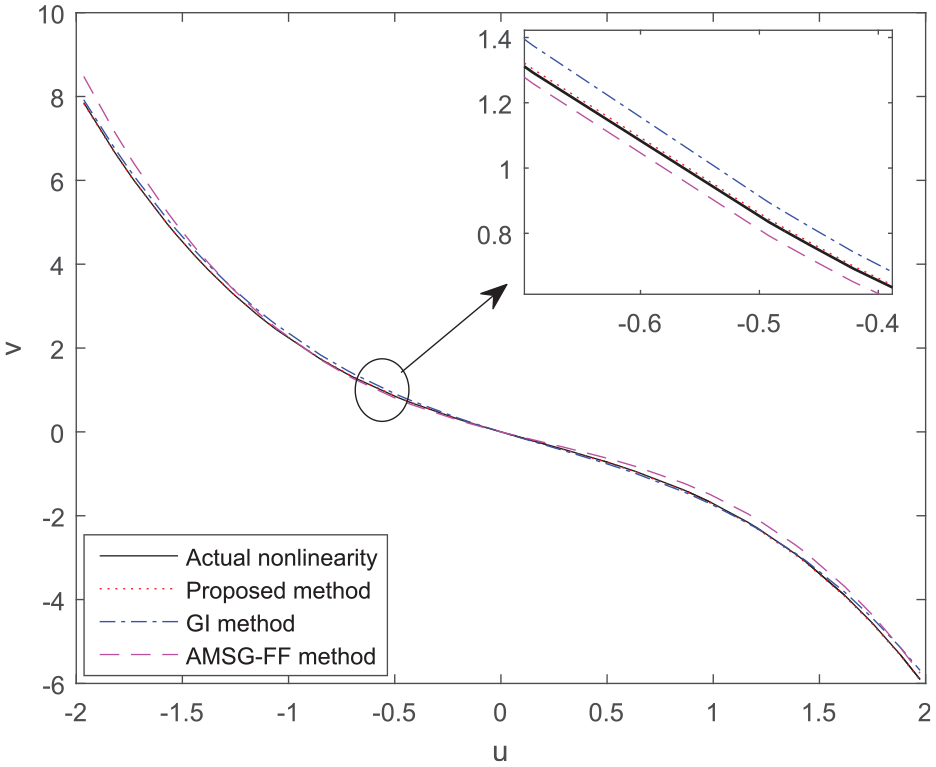
Approximation comparisons of nonlinear subsystem using two methods.
The parameters estimations of static nonlinear subsystem using two methods.

Finally, in order to verify the effectiveness of the proposed identification method, 150 sample data of random multi-step signals are generated randomly as test signals, the gradient-based iterative algorithm, the auxiliary model stochastic gradient algorithm with forgetting factor and proposed method in this paper are used for prediction of the Hammerstein nonlinear state space system, and comparison results are offered in Figure 7.
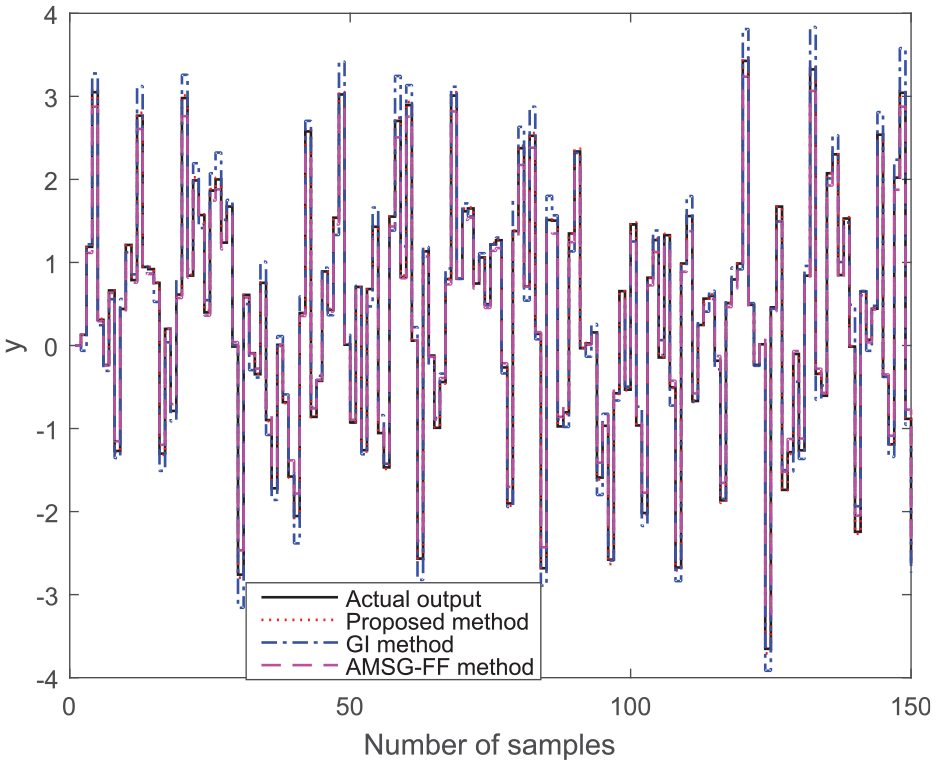
Comparisons of the output results of the three methods.
According to Figure 7, the developed two-stage method can more effectively track actual output of the Hammerstein nonlinear state space system than the gradient-based iterative algorithm and the auxiliary model stochastic gradient algorithm with forgetting factor. As a result, the developed two-stage identification method can identify well Hammerstein nonlinear state space system.
Example 2
In this example, the proposed identification method is applied to practical continuous stirred tank reactor (CSTR) process, where a three-order polynomial model is selected, and the order of the state matrix in the state space is second order. Consider the Van de Vusse reaction as the object of simulation research, the dynamic process of the reaction is:
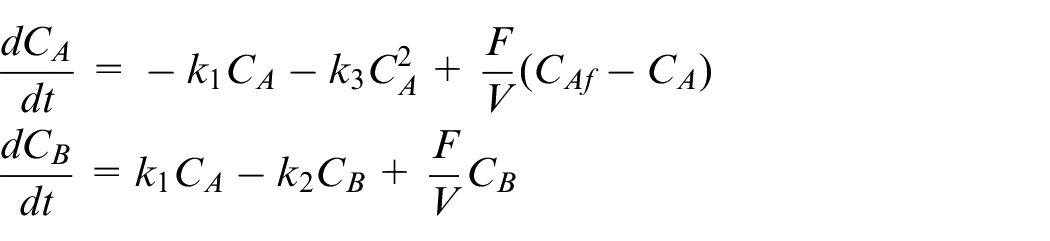
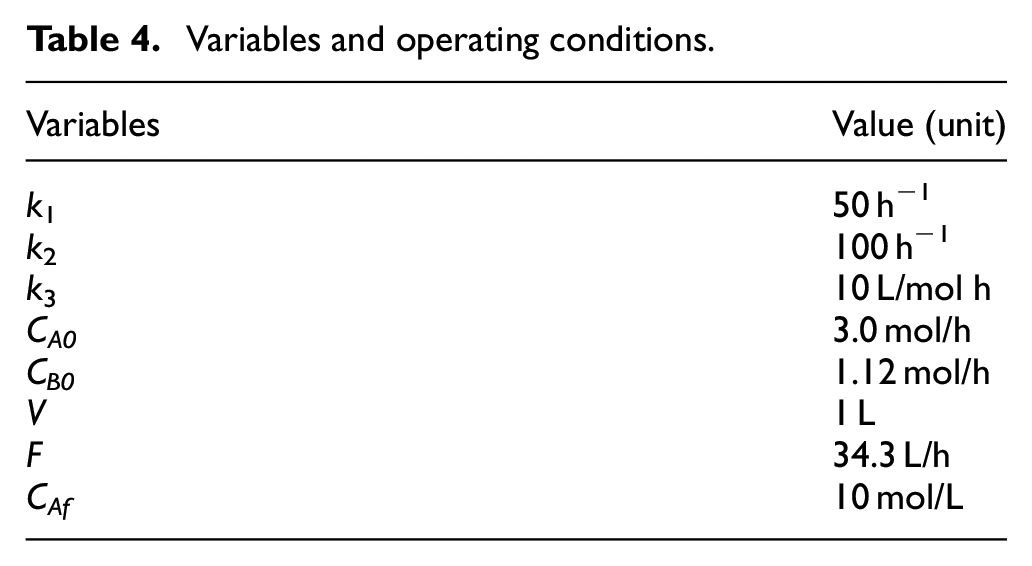
where CA and CB are the concentration of component A and B, F represents the flow rate, CAf is the feed concentration of A, V is the volume of the reactor, and k1, k2, and k3 are kinetic parameters.
Since the temperature of the reactor is controlled through the flow F, and the temperature has a vital impact on the product concentration CB, so we need to find the best flow control strategy to ensure that the product concentration CB can be controlled. The model variables and operating conditions of the reaction are listed in Table 4.
Variables and operating conditions.
To deal with the developed identification method, the binary signals and random signals are employed to acquire CSTR process input-output, as shown in Figure 8.
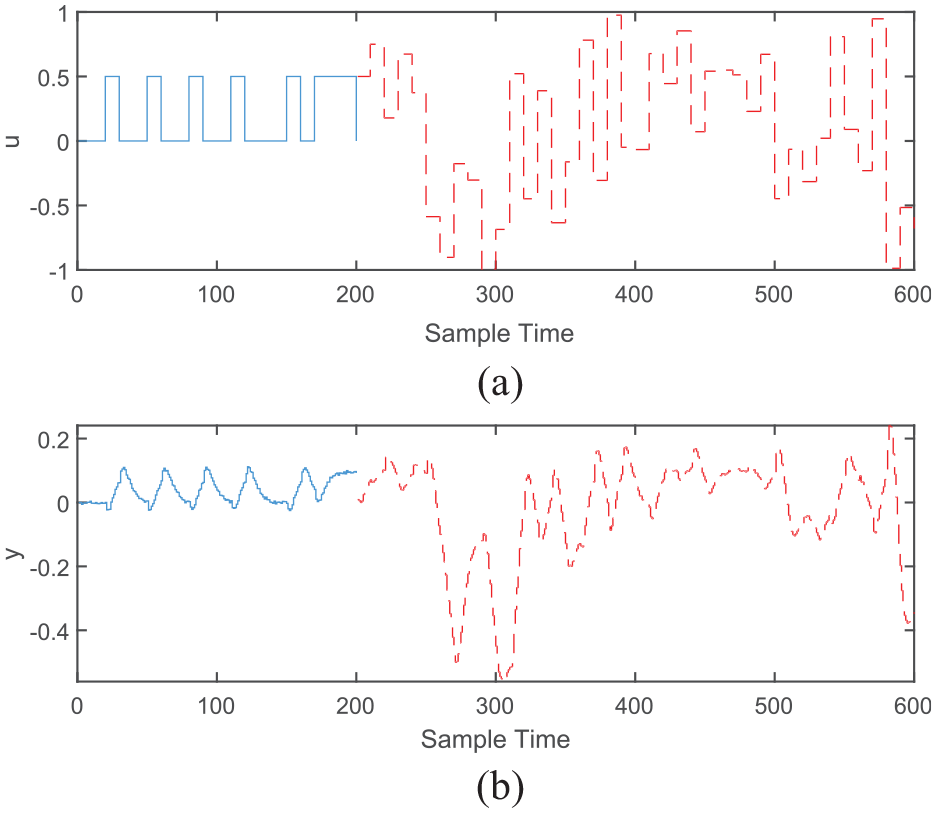
Partial input and output data: (a) input signal and (b) output signal.
According to input and output data, parameter identification results of nonlinear subsystem of polynomial model are
According to the structure of the Hammerstein system, the CSTR control system is designed in Figure 9. The devising concept of the presented controller is to eliminate the nonlinearity of the system, so that the generated system similar equates to a linear system, which is control easily by using linear controller. For the sake of comparison, the following linear PI controller is also presented to control CSTR process:

where
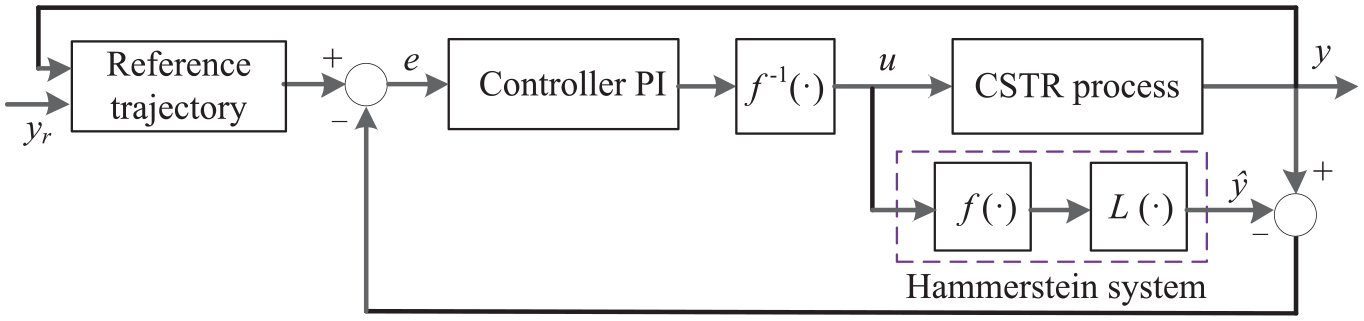
CSTR control system based on Hammerstein system.
In order to show the effectiveness of the presented system and developed parameter identification method, the traditional linear PI controller and the control of Hammerstein system using pole assignment
54
are used to compare with the designed nonlinear PI controller, the control performances of three schemes are shown in Figure 10. In the numerical examples, the parameters of the traditional linear PI controller and the proposed nonlinear PI controller are set to
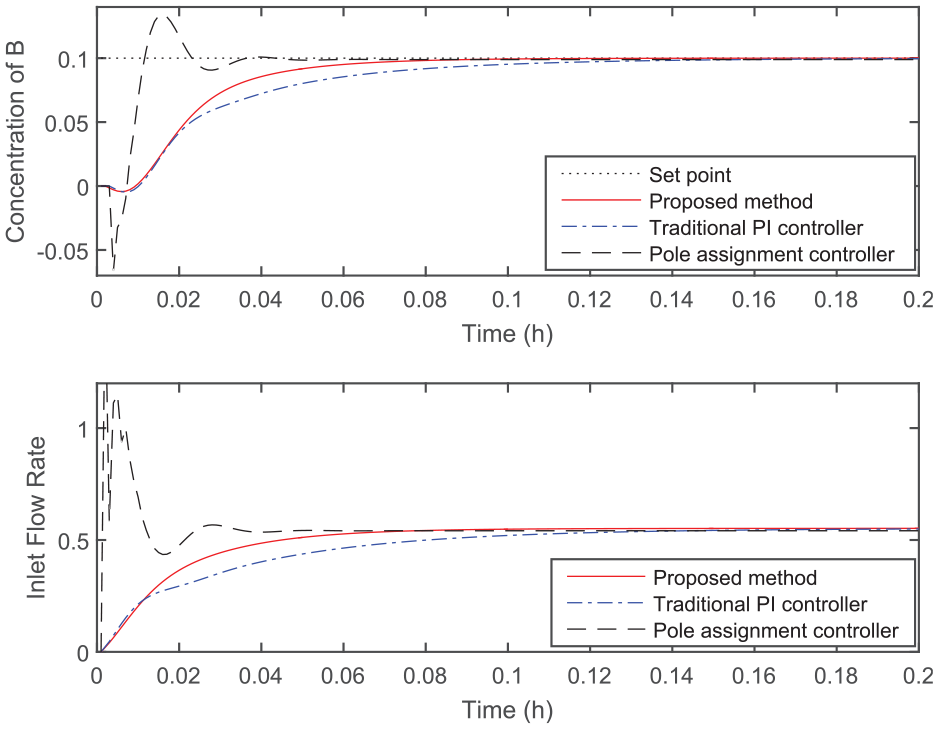
Concentration and inlet flow rate of set point 0.1.
From Figure 9, compared with the traditional linear PI controller, the controller proposed can reach the setting value more quickly, and the inlet flow rate reaches steady value in very short time. Compared with the pole assignment controller, the pole assignment controller has faster response than the controller proposed, but there is a large oscillation. In contrast, the controller proposed can significantly alleviate the oscillation and achieve good tracking performance, and the inlet flow rate also reaches steady value in very short time.
Conclusions
This paper develops a two-stage parameter identification algorithm of the Hammerstein nonlinear state space system using input test signals. With the help of input test signals, identification of the static nonlinear subsystem and dynamic linear subsystem are carried out separately, which simplifies the identification process compared with over-parameterization identification method, and enhances parameter estimation accuracy of the system. In view of unknown variables of the identified Hammerstein system, an effective means is that the unknown state variables are replaced by the estimated values in this research, which solves the problem that intermediate variables cannot be measured. The developed two-stage parameter identification algorithm can be applied to multi-input multi-output nonlinear system to some extent, and colored output noise will be considered in future research.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (62003151), Natural Science Foundation of Jiangsu Province (BK20191035), Changzhou Sci&Tech Program (CJ20220065), and Blue Project” of Universities in Jiangsu Province.