
Abstract
The engagement of target-interceptor is an extremely complicated and nonlinear problem. Most literatures of developed guidance algorithms are hard to work in real-time missile guidance systems because of the complicated design of controllers, restriction in specific condition or excess computing loading. In this paper, the proposed guidance algorithm computes the predicted interception point of target-interceptor and applies particle swarm optimization to optimize the lateral acceleration control commands of missile where the definition of fitness function can guide the missile toward the predicted interception point when the computed fitness value is the minimum. According to the results of simulation experiments, the proposed method has the satisfied target-kill performance to the superior aircraft with high agility. The missile can greatly revise the flight route toward the computed collision course at the initial pursuit stage and the course curve of missile is flatter than the other two guidance laws. Besides, the proposed method can reduce the occurrence of big lateral acceleration control commands acting on the missile to avoid unlocking the evasive target at the terminal stage. As a result, the proposed guidance algorithm based on particle swarm optimization is very effective without using the complicated nonlinear control methods and excess storage burden of computer. It is a simple and feasible missile guidance algorithm due to the advantages of simplicity and effectiveness just like the proportional navigation guidance law but the performance of proposed guidance algorithm is better than proportional navigation guidance law and the other guidance algorithm designed by particle swarm optimization.
Introduction
The missile guidance control system is an important technology for the development of missiles. It is necessary to effectively integrate the object estimation, guidance law and flight control system, of which the guidance law is the key factor to influence the interception performance of missile. 1 The calculation of the target-interceptor engagement must be executed in a specified time in a three-dimensional (3-D) defense space. It is very complicated and challenging to execute the missile guidance algorithms in military applications. 2 Theoretically, the target and missile dynamic equations are highly nonlinear due to the fact that the equations of motion are best described in Cartesian coordinate system, whereas aerodynamic forces and moments are conveniently represented in the target and missile body axis system. 3
Missile guidance laws have been developed for a long period of time. The traditional pursuit guidance law is designed to steer the velocity vector of the missile to point at the target all the time but the guidance ability is terrible to the target with strong maneuvers. The command of line-of-sight (LOS) guidance law tries to place the missile on the frame of LOS vector throughout the engagement. 4 The well-known proportional navigation guidance (PNG) law explicitly generates a lead angle by decreasing the LOS rate to guide the missile toward the collision course and has a great interception performance on weak maneuvering targets.5–7 PNG has been widely adopted in air-to-air or surface-to-air homing missiles due to the simplicity and effectiveness but it may be incompetent to intercept the advanced modern aircrafts with high agility. An effective guidance law is to guide the missile toward the predicted interception point. However, the performance of this approach is greatly affected by the time-to-go estimation and the updated rules of engagement.8–11 In recent years, several different types of guidance algorithms using nonlinear control methods have been proposed to deal with this issue of intercepting maneuvering targets such as the backstepping control, 12 adaptive control guidance law.13,14 Besides, the sliding mode control method has been widely used to design the complicated controllers in missile guidance algorithm due to the advantage of robustness on the uncertainty of system parameters and external disturbance. The missile guidance algorithms based on finite-time control scheme can significantly reduce the miss distance of target-interceptor.14–17 Furthermore, a three-dimensional impact-angle-control guidance law based on the approaches of nonsingular terminal sliding mode control and fixed-time convergence theory is proposed to stably intercept the maneuvering target. 18 However, most of these guidance techniques have resulted in complicated design of controllers or some of these methods require the knowledge of the maneuvering target model.
Artificial intelligence algorithms have been applied to solve the nonlinear and optimization problems in the guidance algorithms for several decades. The neural network algorithm was utilized to design an optimal homing guidance law to intercept the nonmaneuvering target in 1994 and the guidance law based on self-adaptive judge scheme was proposed in 1995. In 1996, the improved self-adaptive judge neural network guidance law with the on-line learning ability could be applied to intercept the linear or close to linear target.19–21 In 1996–2002, Song et al. proposed the neural network guidance law at the midcourse stage. The resulting suboptimal neural network guidance law is of feedback form and simple for onboard implementation. It can be applied to intercept the free-fall targets, maneuvering targets and ballistic missiles in a 3-D space.8–10,22–24 Mishra et al. used the fuzzy logic for inferring the real-time acceleration command to develop a fuzzy homing guidance based on PNG scheme. 25 Omar and Abido designed an integrated fuzzy guidance law based on strength Pareto evolutionary algorithm and the proposed method which consists of three fuzzy controllers could be used in three different interception stages. 26 In the past several years, Kim et al. developed the deep neural network-based guidance law to replace PNG law. This approach is performed by a supervised learning method using a large amount of simulation data from the missile system with PNG. 27 Rajagopalan et al. utilized the multi-layer perceptron to design an artificial neural network guidance algorithm that can effectively replace PNG in a wide range of engagement scenarios. 28 Li et al. treated the target acceleration as a bounded disturbance to design a novel guidance law by using the model predictive control. This approach can be transformed as a constrained quadratic programing problem and that may be solved by the linear variational inequality-based primal-dual neural network over a finite receding horizon. The simulation experiments illustrate the effectiveness for missile interception. 29 The above guidance performances of neural network guidance algorithms are deeply influenced by the parameters setting and training samples of neural network. Most of all, the application of fuzzy logic theorem and neural network training may increase the storage burden of computer. Besides, the genetic algorithm has been once applied to optimize the parameter of the guidance law. However, the problem of this method is to properly design a number of parameters including the probabilities of crossover and mutation, the population size, the number of generations, and the objective function.30,31 Kung and Chen firstly used the particle swarm optimization (PSO) to develop the guidance law by optimizing the acceleration control commands where the proposed guidance algorithm has been verified to be practical. However, the design of PSO fitness function in this study would guide the missile to pursuit the target just like the traditional pursuit guidance law. 32 A model-based machine learning technique known as Q-learning is used to develop a new guidance scheme. The training samples based on the simulation experiments influence the precision of guidance model and increase the computing loading. 33 Nobahari and Nasrollahi designed a heuristic guidance algorithm using an ant-based optimization method to estimate simultaneously the states of pursuer, the target maneuver and the optimal guidance commands. In this study, an augmented state space model is introduced to merge the guidance and estimation problems into a single dynamic optimization problem. The guidance performance is excellent but the optimal guidance commands are found on a finite horizon. 34
The guidance control for the target interception is an extremely complicated and nonlinear engineering problem. The performance of early developed guidance laws are not satisfied to the superior aircraft with high agility and the guidance algorithms using modern nonlinear control theories are not easy to implement in the practical 3-D engagement of target-interceptor due to the possible reasons such as the complicated design of controllers, pre-information acquirement from maneuvering target and restriction in a specific condition. It is effective to utilize the artificial intelligence to design the nonlinear complicated guidance algorithm. However, the application of neural network and fuzzy logic theory may increase the computing loading that may be not proper to work in a real-time missile guidance system. PSO has been frequently used in different optimization problems due to its high convergence speed and solutions. Some researchers have applied PSO to the real-time nonlinear control engineering technology such as the path planning and tracking performance of unmanned aerial vehicle.35,36 In addition, PSO was also used to develop the guidance law successfully. 32 Therefore, this study develops a dynamic interception point guidance algorithm based on PSO in a 3-D engagement game. The author utilizes the current dynamics of target and missile to figure out the predicted interception point. PSO algorithm is used to produce and optimize the acceleration control commands acting on the missile. The concept of predicted interception point combined with PSO algorithm can be utilized to develop the missile guidance law in this paper. The proposed guidance algorithm is feasible and easy to be implemented without using the complicated nonlinear mathematical theorem and will not increase too much storage burden of computer due to the advantages of simplicity and high convergence speed of PSO. Section 2 shows the mathematical aerodynamic model of target and missile. Section 3 carefully explains the proposed dynamic interception point guidance law based on PSO. Several simulation experiments are executed to demonstrate the merits and capabilities of the proposed algorithm in Section 4.
Mathematical model
Figure 1 illustrates the 3-D engagement geometry for the pursuit-evasion game and defines the angular and Cartesian quantities depicted therein. The aerodynamic model of target is assumed as a point-mass to simulate the tactical evasion route made by the aircraft pilot. The target dynamic equations in a 3-Dspace are modeled as follows 37 :






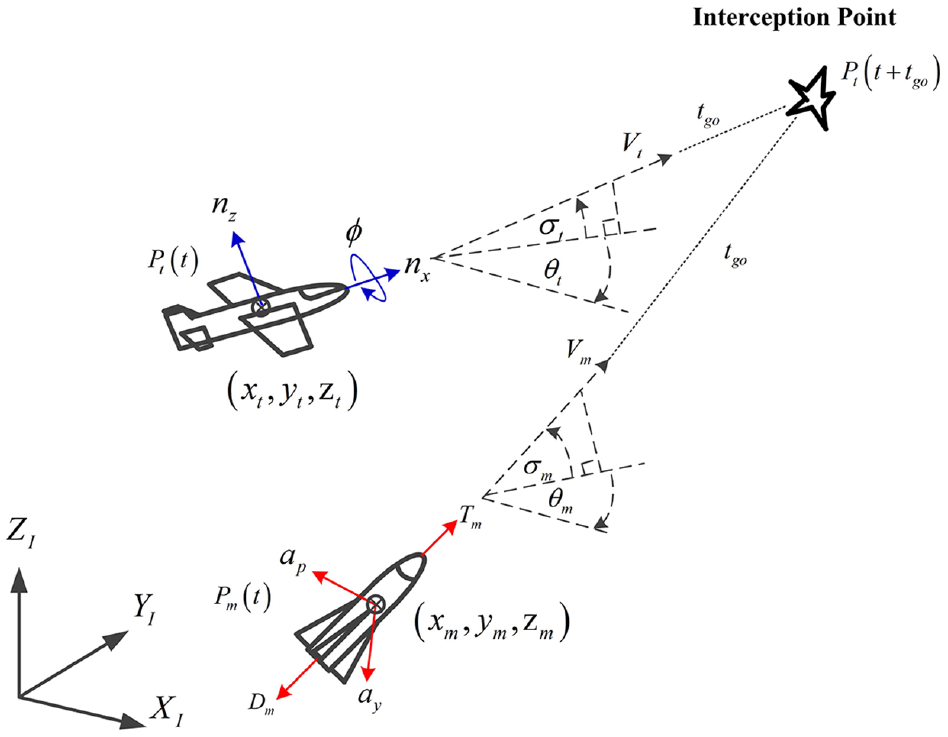
3-D engagement geometry for the pursuit-evasion game.
The 3-D dynamic motion of target can be controlled by three variables



The aerodynamic model of missile is assumed as a point-mass to simulate the interceptor dynamics in a 3-D space and the dynamic equations are modeled as follows 38 :






Where

The 3-D dynamic motion of missile can be controlled by


Interception point guidance law
Predicted interception point
The proposed algorithm utilizes the target flight trajectory and the missile dynamics to compute the predicted interception point when the radar system tracks and identifies the target motion state. The computation of predicted interception point needs to follow the assumptions: Firstly, the future position of missile

Equation (19) is an extremely nonlinear and difficult mathematical question for obtaining an analytical solution. However, it is effective to apply the Newton-Raphson method to calculate the approximated numerical solution.
Particle swarm optimization
Particle swarm optimization (PSO) algorithm was firstly proposed in 1995 and the basic concept is to imitate the animal social behavior from birds foraging.39–41 The advantages of PSO algorithm include the fast converging speed, few parameters and extensive application. In this algorithm, a group of particles named population is generated randomly in the beginning and each particle represents a possible solution for the optimum of problem. Each particle can continuously search for the local optimal solution (Particle Best Value, Pbest) in the problem space and that memorize the path at each step. During the evolutionary process, the Pbest will be also compared with each other for choosing the best one (Global Best Value, Gbest). If the population consists of M-particles and each particle is D-dimension, the position and velocity of i-th particle are denoted as


where k denotes the evolution count, we denotes the inertia weight, r1, r2 denote the random numbers in the interval (0, 1), and c1, c2 denote the learning factors of positive constants.
Interception point guidance law
The engagement of target-interceptor is an extremely complicated real-time problem and the dynamic equations are highly nonlinear in the guidance algorithms. In this paper, PSO is directly applied to optimize the control commands of lateral acceleration in the guidance law to guide the missile to destroy the target at the interception point. The calculation of predicted interception point is executed according to the target flight route and the missile dynamics. The algorithm of interception point guidance law (IPG) consists of several steps in detail as follows:
Step 1. Initialization:
Apply the dynamic equations of the target and the missile. It is essential to set the initial conditions including the position, velocity, pitch angle, yaw angle, time delay constants, natural frequency, damping ratio, gravity acceleration, missile mass, missile thrust force, drag force and drag coefficients, and design the control commands of target flight route.
Design the PSO parameters including the population size, evolution times, inertia weight and learning factors.
Step 2. Computation of predicted interception point and Randomization of missile control commands:
Use the concept of predicted interception point to compute the future position of target
Randomize the lateral acceleration control commands of the missile, where the maximum acceleration
Step 3. Apply the missile dynamic equations and the lateral acceleration control commands of the missile to compute the future position of missile
Step 4. The fitness function

Step 5. Compute the local optimal solution defined as
Step 6. Update the particle position and velocity by using the equations (20) and (21).
Step 7. Repeat the optimization process from step 3 to step 6 until the threshold defined as the standard deviation is satisfied. Therefore, the optimal lateral acceleration control commands
Step 8. Apply the optimal lateral acceleration control commands to update the position of missile.
Step 9. Compute the relative range defined as
Step 10. Update the target motion state, position, and repeat the process from step 2 to step 9 if the ending rule (
The proposed guidance algorithm can be illustrated in Figure 2. The key factors of the proposed guidance algorithm focus on the combination of two techniques to solve the highly nonlinear and complicated real-time engagement of target-interceptor. Firstly, the author utilizes the equation (19) to compute the predicted interception point in which the time-to-go (
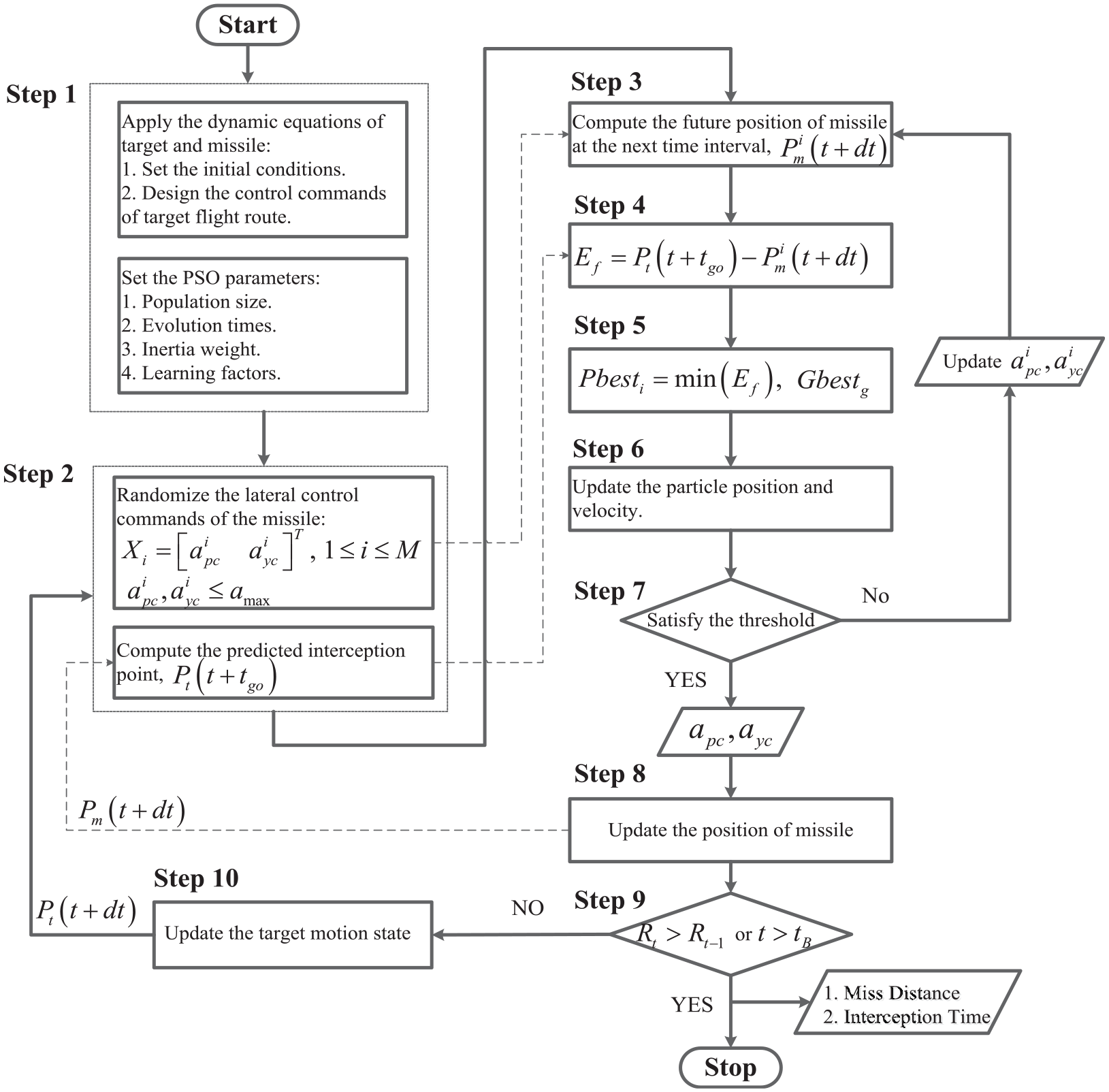
Flow chart of the proposed guidance algorithm.
In this study, the design of PSO parameters influences the optimization of lateral acceleration control commands of missile. It is proper to choose a big size of particle amount to solve the complicated nonlinear mathematical problems. The inertia weight mainly controls the exploration ability and convergence speed of optimization. The above two parameters are the key factors to decide the optimization effectiveness and the learning factors influence Pbest and Gbest. In order to obtain the satisfied guidance performance, the author has to utilize the trial-and-error method to design PSO parameters based on the optimization effect and convergence speed.
Results and discussion
The proposed IPG algorithm performance is verified by three different pursuit-evasion simulation experiments and compared with PNG in a 3-D space. Besides, the first PSO guidance algorithm (PSOG) developed by Kung and Chen has been reproduced to compare with the proposed method. 32 Runge Kutta method is used to execute the simulation experiments of target-interceptor. For the comparison, the PNG law is considered as follows 10 :


where
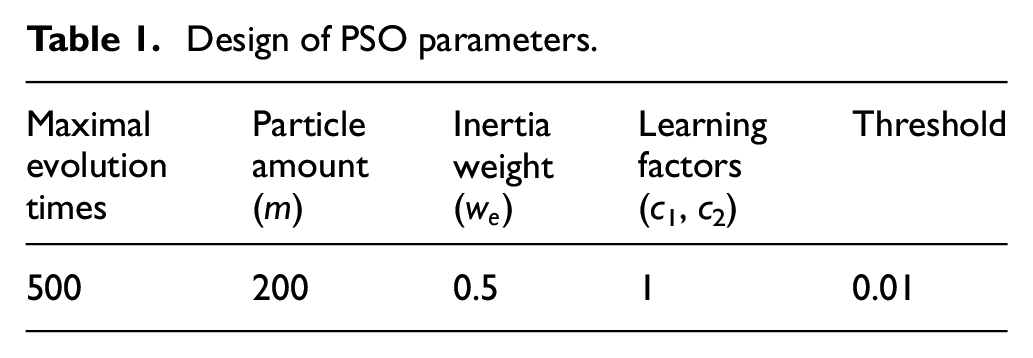
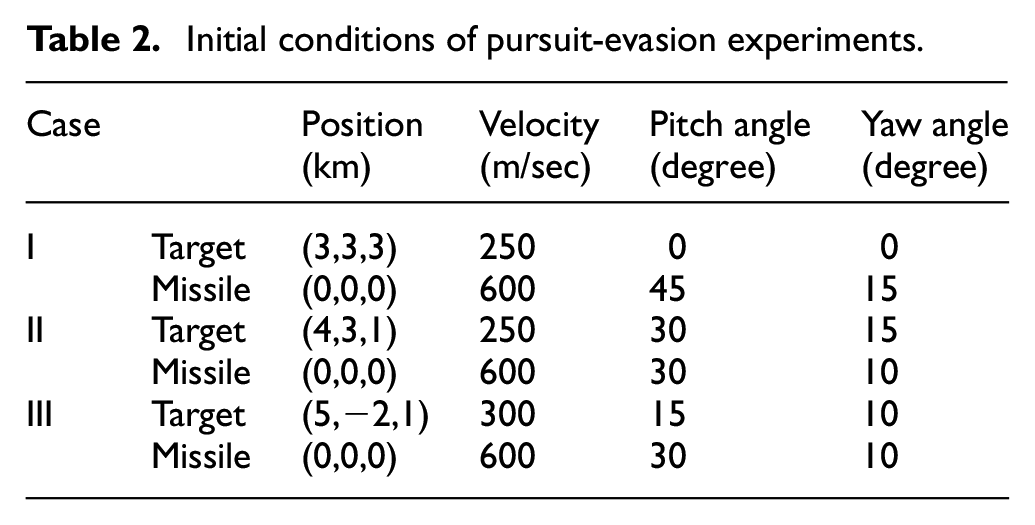
Table 1 is the design of PSO parameters. Table 2 is the initial conditions of pursuit-evasion experiments. Besides, the proposed IPG algorithm applies PSO to optimize the control commands of missile. It may produce a little deviation of simulation results due to the optimization process and property of PSO parameters. Therefore, IPG has been repeated by 10 times to prove the guidance performance and PSOG is also executed in simulation experiments. The parameters of mathematical models of target and missile are designed as follows4,37: the time delay constants


where
Design of PSO parameters.
Initial conditions of pursuit-evasion experiments.
Case I: missile attacks the rapid acceleration target.
Case I: variations of missile pitch angle and yaw angle.
Guidance performance of IPG, PSOG and PNG in Case I.
Software: MATLAB. Hardware: Intel(R) Core(TM) i5-2450M CPU@ 2.50GHZ, RAM 8.00G.
Case II: missile attacks the big G-force turn target.
Case II: variations of missile pitch angle and yaw angle.
Guidance performance of IPG, PSOG, and PNG in Case II.
Software: MATLAB. Hardware: Intel(R) Core(TM) i5-2450M CPU@ 2.50GHZ, RAM 8.00G.
Case III: missile attacks the big G-force S-turn target.
Case III: variations of missile pitch angle and yaw angle.
Guidance performance of IPG, PSOG, and PNG in Case III.
Software: MATLAB. Hardware: Intel(R) Core(TM) i5-2450M CPU@ 2.50GHZ, RAM 8.00G.
In these scenarios, IPG utilizes the current motion state of target and missile to compute the predicted interception point where PSO optimizes the lateral acceleration control commands and all of data can be updated at each guidance cycle to guide the missile toward the optimal interception route. PSOG also applies PSO to optimize the lateral acceleration control commands but the design of fitness function in PSOG guides the missile to pursuit the target just like the traditional pursuit guidance law. In PNG, the missile continuously moves close to the target during the pursuit process because the design of control commands is based on LOS rate along the direction of pitch and yaw respectively. According to the above guidance method analysis, it explains why IPG can guide the missile to intercept the target in shorter miss distance and interception time. IPG greatly revises the direction of flight route at the initial pursuit stage and has the flatter course curve than PNG and PSOG. As a result, the guidance performance of IPG is indeed superior to PNG and PSOG in this study. Furthermore, IPG can reduce the occurrence of big lateral acceleration control commands acting on the missile to avoid unlocking the evasive target at the terminal stage. Besides, PSOG and PNG guidance ability have been tested by three different cases (rapid acceleration target, big G-force turn target, and big G-force S-turn target) as well. The simulation experiment results explain PNG guidance performance is not effective to intercept the advanced modern aircrafts with high agility. PSOG algorithm can be executed successfully but it needs to modify the design of fitness function to improve the guidance ability.
In PSO algorithm, the size of particle amount (
Evolution times of three different inertia weights used in IPG algorithm in Case I.
In order to further understand the influence of parametric uncertainty of PSO and validate the effectiveness of predicted interception point in IPG algorithm, the author has additionally executed several simulation experiments by using different design of PSO parameters in Case I. Table 6 proves the value of inertia weight (we = 0.5) has the best guidance performance in this study. The learning factors designed as 1 are proper and the size of particle amount (M = 200) is enough to obtain the satisfied optimization results. Excess particles will increase the storage burden of computer. However, all of the simulation results in Table 6 prove that the proposed IPG algorithm based on different types of the design of PSO parameters still has the shorter miss distance than PNG. In the proposed guidance algorithm, the author utilizes the trial-and-error method to determine the design of PSO parameters based on the optimization effect and convergence speed to obtain the satisfied guidance performance.
Guidance performance of IPG using different design of PSO parameters in Case I.

Conclusion
This paper has proposed an investigation into the dynamic missile guidance algorithm for intercepting the maneuvering tactical target in a 3-D environment. The major advantage of the proposed IPG algorithm is to guide the missile toward the predicted interception point rather than maneuvering continuously to impact the target. PSO is used to optimize the lateral acceleration control commands acting on the missile in highly nonlinear guidance algorithm. The mathematical model of IPG algorithm has been built in a simple scheme just like PNG algorithm that it is feasible to be realized in a real-time complicated 3-D engagement of target-interceptor. The simulation experiments results prove that the proposed IPG algorithm is able to intercept the superior tactical aircraft of rapid or big G-force motion effectively and the performance outperforms the PSOG and PNG. In addition, IPG has the least course revision at the terminal stage and can reduce the occurrence of the big lateral acceleration control commands acting on the missile to efficiently increase the target-kill ratio.
In this study, the design of PSO parameters influences the guidance performance of IPG algorithm and the author has to utilize the trial-and-error method to obtain the satisfied guidance performance based on the optimization effect and convergence speed. Therefore, the promotion of optimization effectiveness based on the design of PSO parameters can be further developed in the future. Besides, it may be possible to apply the proposed guidance technique to the research of ballistic missile guidance technique or combine with other artificial intelligent algorithms for the advanced development of target-interceptor.
Footnotes
Acknowledgements
The author is grateful for the support of Kuei-Yi Chen who works in National Chung-Shan Institute of Science and Technology, Taiwan (R.O.C.).
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.