
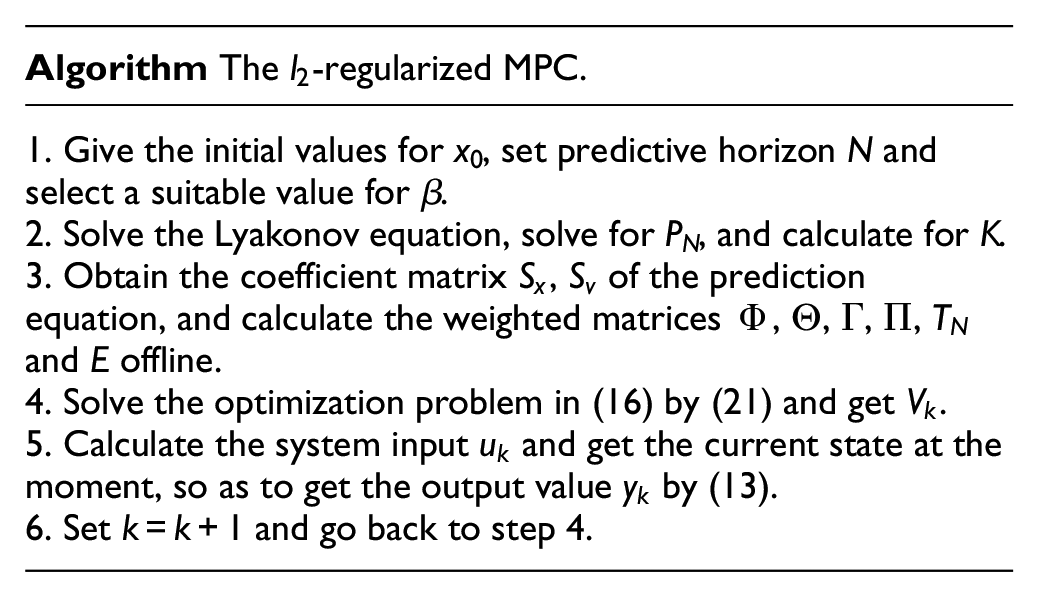
Abstract
The Autoregressive Moving Average (ARMAX) model with exogenous input is a widely used discrete time series model, but its special structure allows outliers of its process to affect multiple output data items, thereby significantly affecting the output. In this paper, a regularized model predictive control (MPC) is proposed for an ARMAX process affected by outlier noise. The outlier noise is modeled as an auxiliary variable in the ARMAX model, and the MPC cost function is reconstructed to reduce the influence of outlier noise on multiple data items. The stability of the proposed method and the convergence of output/input and state are guaranteed. The degree to which regularization affects the system can be adjusted by an optional parameter. This paper provides some helpful insights on how to choose this optional parameter in the cost function. The effectiveness of the proposed method is demonstrated by the results of 200 repeated simulations.
Introduction
The autoregressive moving average (ARMAX) model 1 with exogenous input is a discrete time series model that is widely used in system description and control design.2–4 The output of the ARMAX process is an autoregressive structure influenced by a sequence of historical inputs, outputs and white noise, so the model can accurately describe a large number of real processes of general complexity with a good balance between complexity and performance, 5 but this structure allows outliers of the ARMAX process to affect multiple data items and thus significantly affect the output, which makes estimating the parameters of the ARMAX process challenging, which has become a research hotspot in processing estimation problems. 6
Model predictive control (MPC) is usually used to solve the optimization problem of the ARMAX process.7,8 At each sampling instant, the open-loop constrained optimal control problem of MPC is solved in a finite horizon, and the control input sequence is obtained. The first data from the obtained optimal control sequence is applied to the system and the problem is repeated at the next sampling instant according to the new measurements.9,10 In recent years, the MPC algorithm based on the neural network model11,12 has also received attention. General MPC methods are accurate and undisturbed for system models, but they are inadequate to deal with the various uncertainties of the actual systems, such as model inaccuracy, time variations, and unknown disturbance. Robust model predictive control (RMPC)13,14 is a model-based control technology, which is suitable for uncertain or nonlinear systems subject to physical constraints.15,16 By considering the influence of model uncertainties in the prediction horizon and solving the open-loop optimal problem at each sampling time, this method ensures the closed-loop stability and makes the uncertainties meet the constraints.17,18 Generally when studying control algorithms for models with additional uncertain disturbances, a high-priority option is to improve the performance of RMPC.19,20
In machine learning and control engineering, outliers are generally regarded as anomalies, inconsistencies, and deviations in the sequence in data statistics studies.21,22 Although outliers rarely appear, they will affect the actual project analysis and cause deviations in the results.
23
Therefore, they cannot be ignored in the interference input process. Outliers may occur in data sets due to sensor failures, manual entry errors, or abnormal events.
24
Regularization is an effective solution to the problem that the output is affected by outliers in the ARMAX process. The authors Forero et al.
25
proposed a block coordinate descent method, and obtained an iterative algorithm with guaranteed convergence and less computational complexity. The authors Mateos and Giannakis
26
developed a robust principal component analysis (PCA) approach that encourages sparsity in the outlier matrix by explicitly modeling outliers. The authors Farahmand et al.
27
developed robust smoothers for dynamical processes that are polluted by outliers in both measurements and state dynamics.
In order to solve the problem that the ARMAX process is polluted by outlier noise and obtain a clear parameter selection decision. In this paper, we propose an MPC method based on
The rest of this paper is organized as follows. Section 2 describes the structure of the ARMAX process and presents some fundamentals of MPC. Section 3 details how we develop the MPC for the ARMAX process with outlier modeling. Section 4 discusses and analyzes the simulation results. The conclusion is drawn in Section 5.
Preliminaries
The ARMAX process
Consider the following common ARMAX process:


where

are matrix polynomials in backward-shift operator
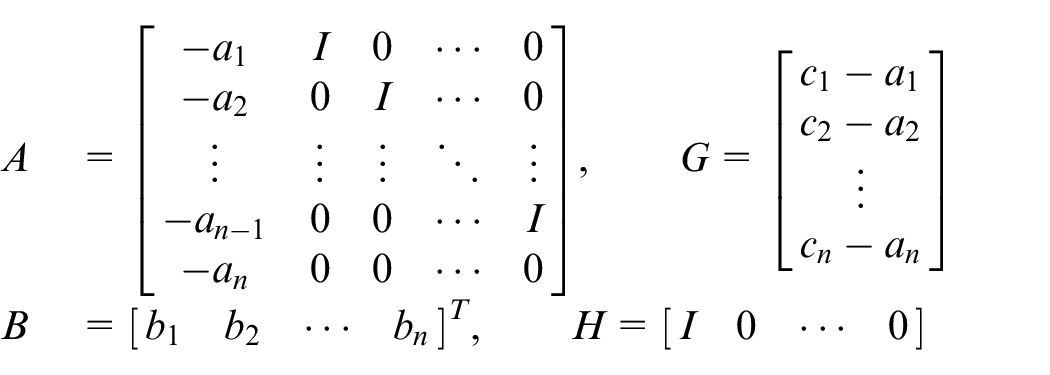
The state space of the ARMAX process in (1) can be given as follows:


where
MPC for the ARMAX process
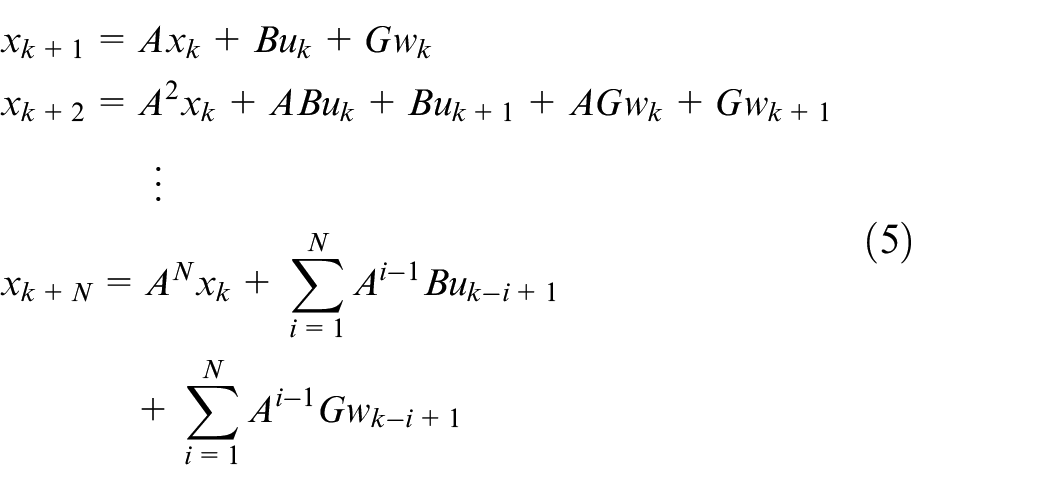
To thoroughly analyze the problem, we first derive a standard MPC for the ARMAX process with general disturbances in this section. By expanding the derivation equation (3), the following
where

where
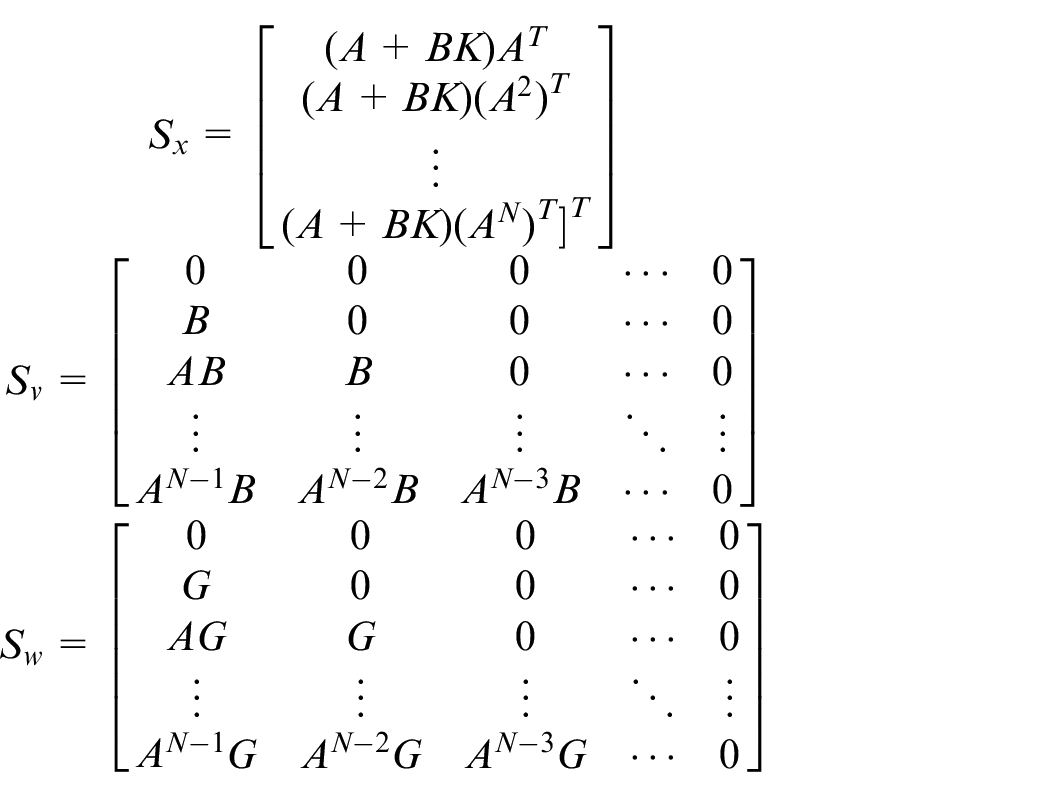
and the matrices are defined as
where
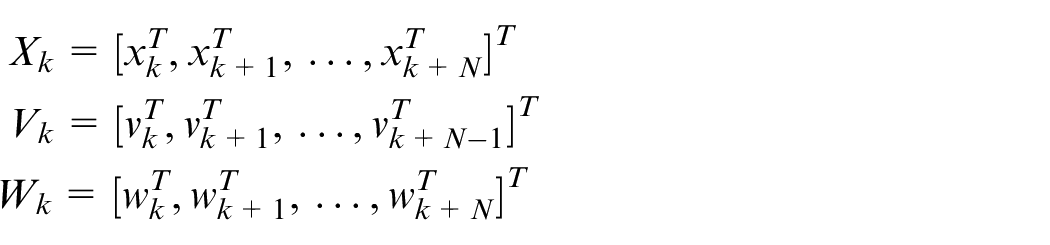
Equation (5) can be written in a more compact form as

For the equation for predicting the state of the MPC system, it is given leveraging the system’s special structure and collected it in one place using a uniform notation. Next, we will improve the method described here to obtain a more general method. The goal of MPC is usually presented in the form of quadratic programing. At time
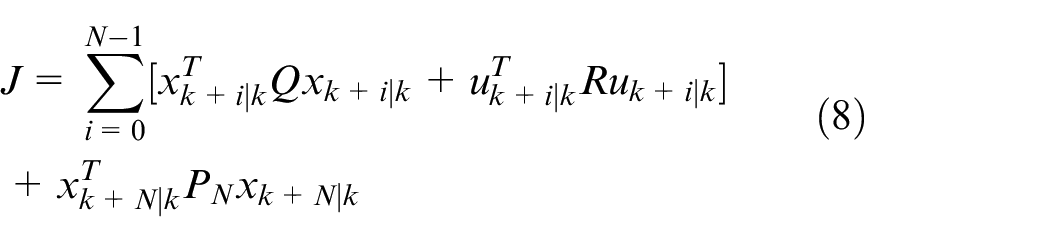
where
Equation (6) is substituted and converted into a matrix equivalent cost function:

where
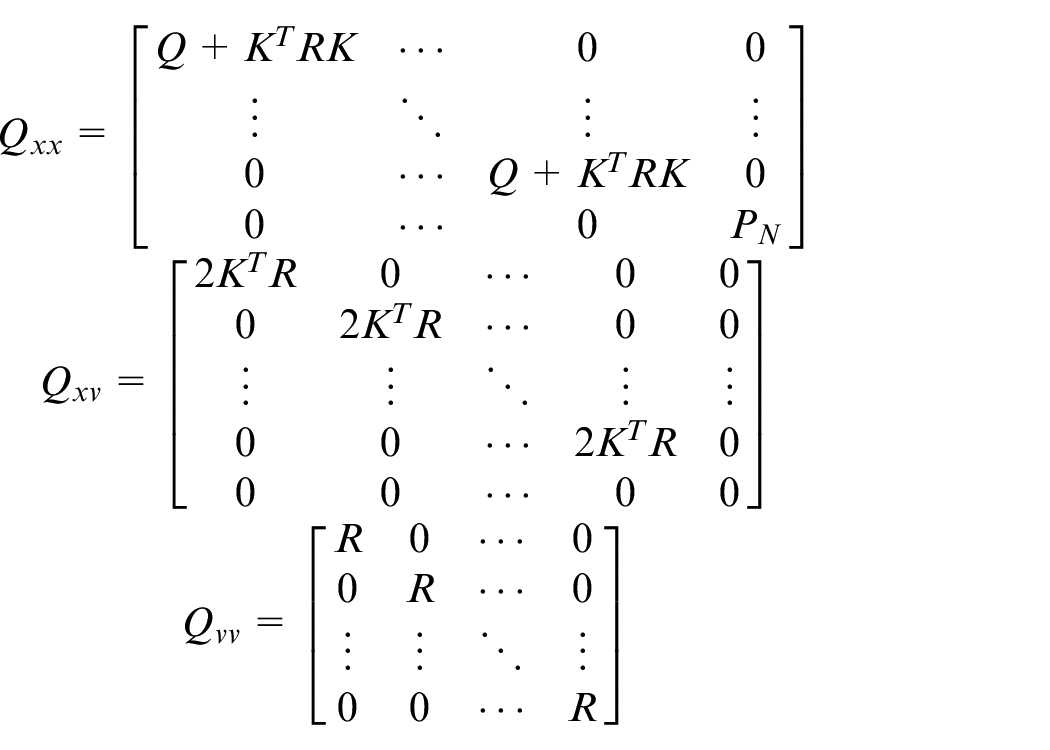
Substituting equation (7) into equation (9), the deformation of the cost function

where
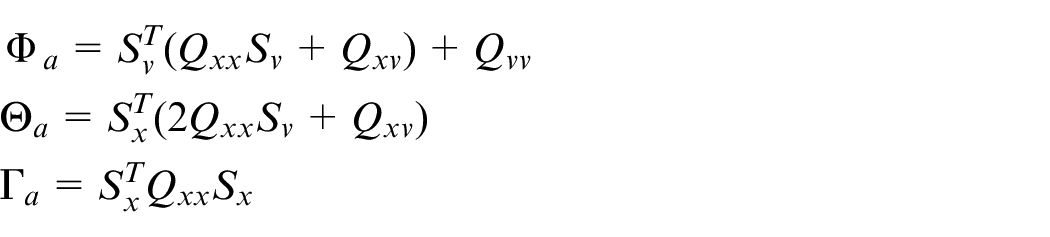
To find the minimum value, suppose that the gradient of

Here we find the solution of
Regularized MPC
In this part, we explicitly model outliers by introducing auxiliary vectors
Outlier modeling
We define the auxiliary variable

The state space of the MPC is remodeled so that the state quantity is affected by outliers. The new process still retains the features of the old one. The new process model is given as follows:

The prediction equation for

It can be seen from the equation that data vector
The
regularized MPC
The handling of outliers and data mutations is a major topic in the field of science. Outliers in measurements are usually considered as accidental large errors.
30
In this specific case,
Based on the points discussed above, we introduce a regularization term into the cost function equation (9) of MPC. The regularization term consists of an optional parameter and the quadratic of

where

where
Substituting equation (14) into equation (15) and based on

where
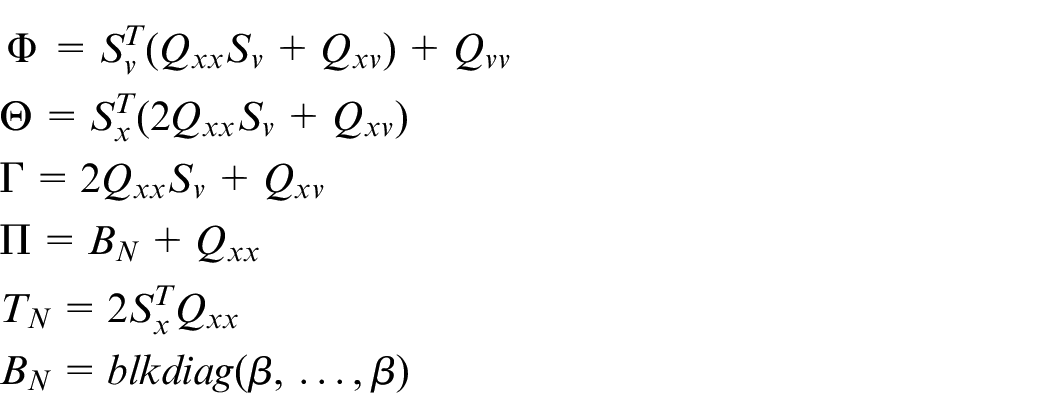
Gradient descent is an effective algorithm to solve the regularization of

where

Combining equations (17) and (18), we can obtain


The optimization variable of the proposed MPC problem is the decision variable

where

and
Examples
In this section, some examples are given to verify the effectiveness of the proposed MPC, and its performance is tested with simulation and experimental data.
Example 1: Outlier
Consider the ARMAX process in (1) where
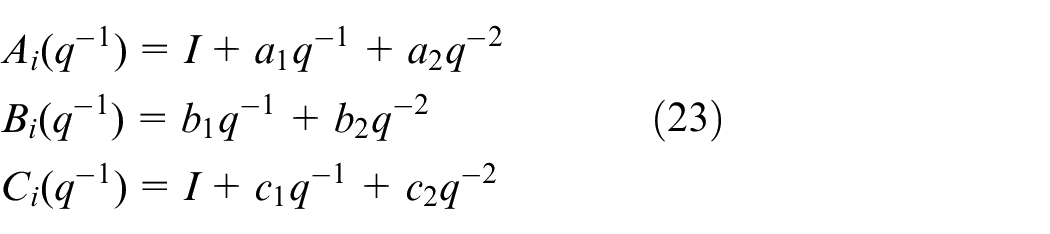
where

and the measurement noise

The process is again initialized with
The selection of optional parameters
Figure 1 depicts the output of the proposed MPC when
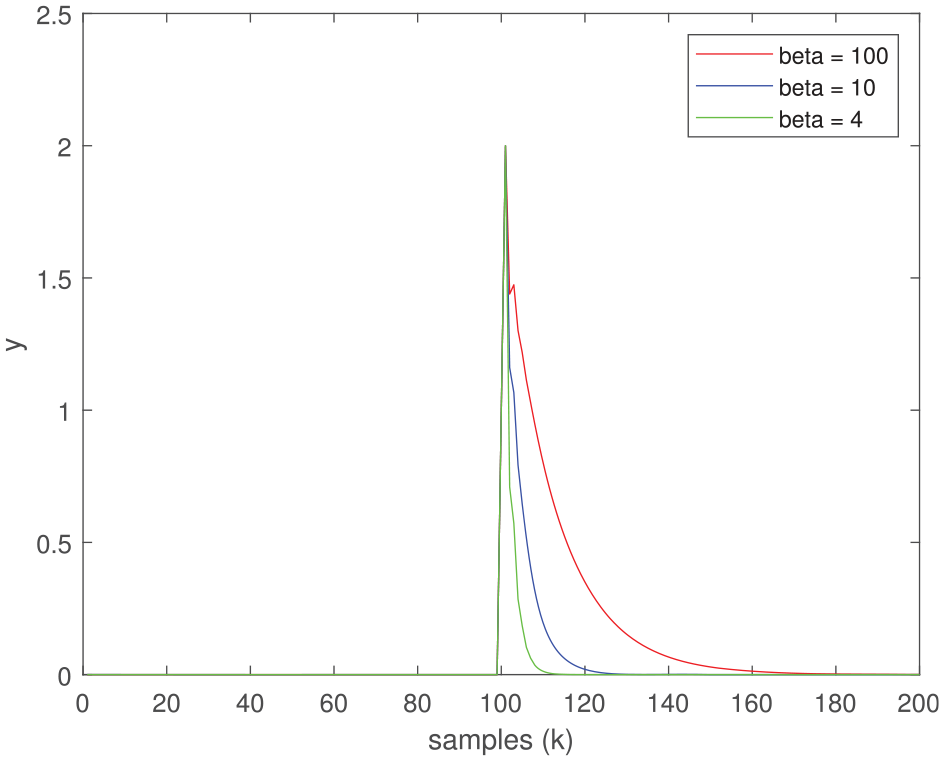
The output for the proposed MPC with different values of
Example 2: Performance comparison between MPC and PID for ARMAX processes
Consider the ARMAX process described by equation (23) where the noise

where

For simplicity, the reference signal is set to 0, and the PID controller parameters are set to
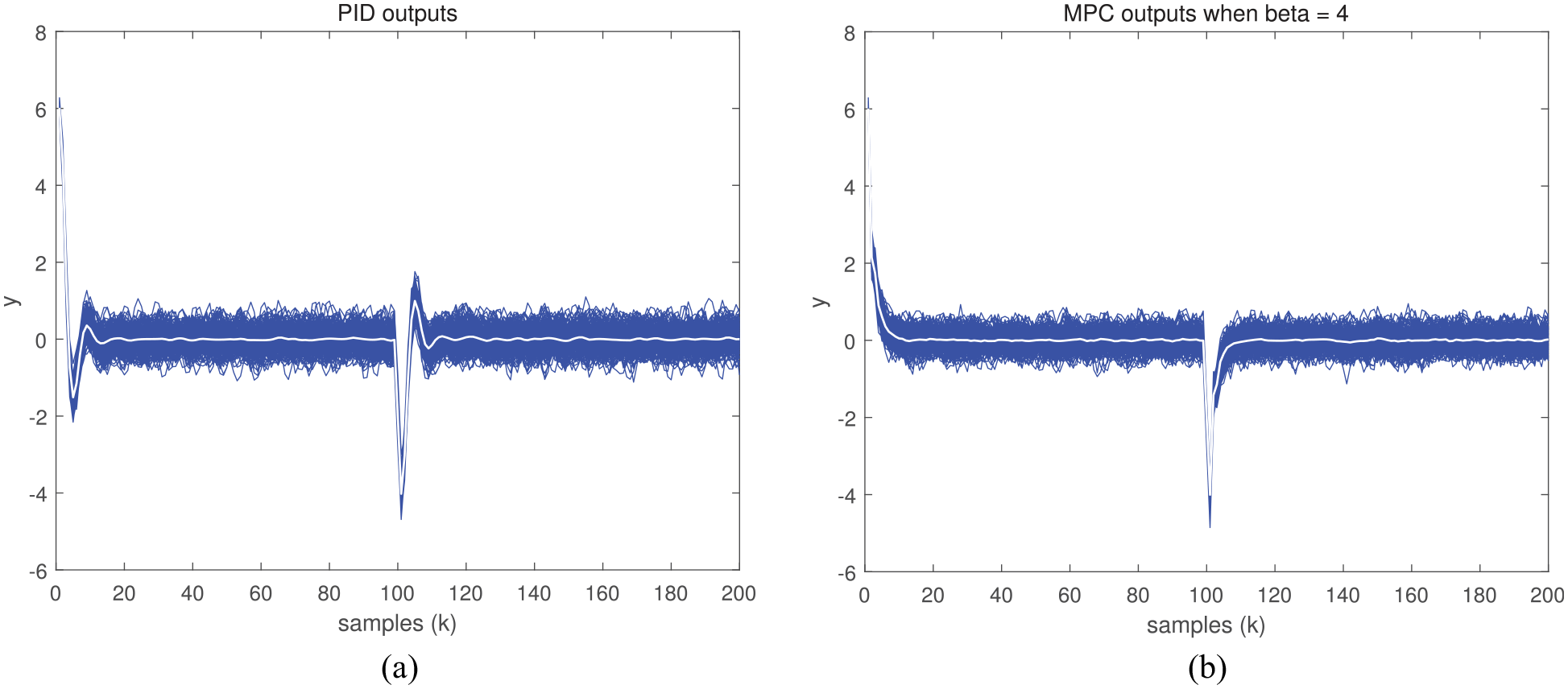
Output signals of PID and proposed MPC. The white curve represents the average of 200 runs: (a) PID and (b) regularized MPC.
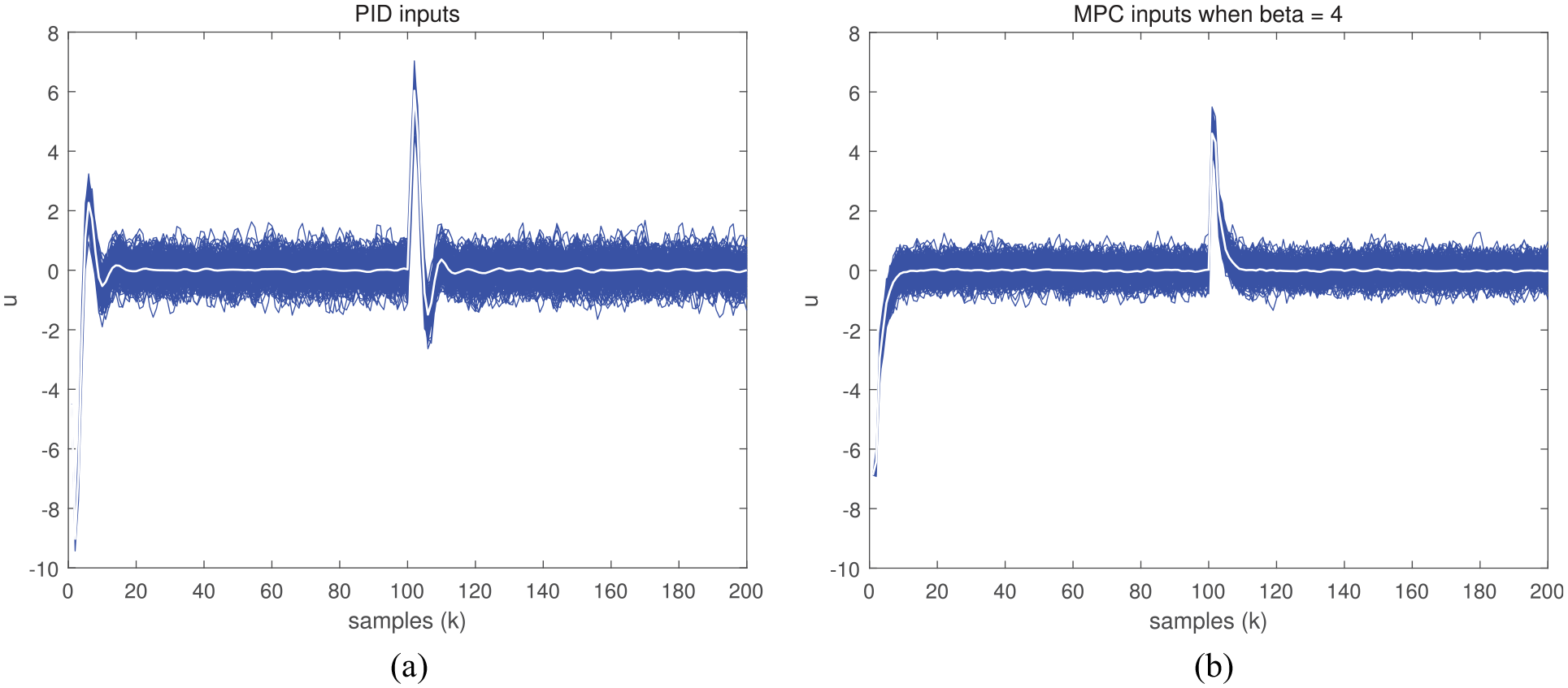
Input signals of PID and proposed MPC. The white curve represents the average of 200 runs: (a) PID and (b) regularized MPC.
Conclusions
In this paper, we present an MPC method for ARMAX processes with outlier noise. The outliers are modeled as auxiliary variables, and the cost function of the MPC is reconstructed by means of
The outlier noise introduced in this paper is universal to the mathematical model, and the proposed regularized MPC should be applicable to more scenarios. In future work, the applicability of this algorithm will be further explained and improved.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Natural Science Foundation of Shaanxi under Grant 2022JQ-651.