
Abstract
Vibration control of composite structures with distributed masses under random loadings is a significant issue. Adjustability of dynamic characteristics including response spectrum peaks and valleys is important for structural vibration control. The vibration control design in space contains structure and conformation designs which combination results in periodic composite structures. In the present paper, spatial periodicity control design is proposed. Stochastic response adjustable performance of a visco-elastomer sandwich plate with harmonic distribution of geometrical and physical parameters and distributed supported masses under random base motion loading is studied. Both facial layer thickness and core layer modulus of the sandwich plate are considered as harmonic distribution in length and width directions as well as periodically distributed masses. Partial differential equations of coupling motions of the sandwich plate system are derived and converted into ordinary differential equations for multi-mode coupling vibration. Generalized stiffness, damping, and mass coefficients are functions of the harmonic distribution parameters. An analysis solution with frequency response function and response spectral density expressions of the sandwich plate system is obtained. Numerical results are given to show the response adjustable performance through the harmonic geometrical and physical parameters and distributed masses. The results have a potential application to stochastic vibration control or dynamic optimization design of smart composite structure systems.
Keywords
Introduction
Structural vibration control, especially stochastic vibration control is an important research subject in engineering.1,2 For example, the vibration control of a system in which vibration-sensitive instruments are supported on base structure has been presented. 3 Complex environmental disturbances are regarded as random loadings. The vibration control can be designed in time domain and in space. Most researches are on the temporal control design1,2,4–8 while relatively fewest researches are on the spatial control design. In terms of structure, to effectively attenuate vibration, damping sandwich structures are designed and studied increasingly. Sandwich beam and plate with distributed supported masses have been presented to model the system in which vibration-sensitive instruments are supported on a planar structure. 3 Vibration suppression effectiveness of a sandwich structure with non-adjustable viscoelastic core is limited under various loadings. Then controllable smart materials such as magneto-rheological (MR) liquid have been used as the core of a sandwich structure to provide adjustable dynamic properties,9–14 which can rapidly change in rheological properties under applied magnetic fields in millisecond.15–18 However, the MR liquid has certain instability such as magnetic particle settlement. Therefore, MR visco-elastomer (MRVE) has been developed to replace the MR liquid as the core of sandwich structures for effective vibration control.19–27
In past decades, many researches were reported on dynamic characteristics and application to control devices of controllable MR liquid15–18 and MRVE.28–40 One-dimensional sandwich beam with MRVE core has been studied on periodic vibration and adjustable dynamic rigidity,19,20 frequency response characteristics,21–23 stochastic vibration response, 24 dynamic stability,25–27 and potential application. 41 Furthermore, some researches on two-dimensional sandwich plate with MRVE core have been presented including vibration characteristics,42–45 sound transmission properties, 46 stochastic vibration response, 47 optimum location of partial core,48,49 and dynamic stability.50,51 However, in those researches, the MRVE core of sandwich beam and plate was only considered as having fully uniform or locally uniform mechanical properties. Therefore, to fully use MRVE controllability in space, the sandwich beam and plate with non-uniform or periodic dynamic properties of MRVE core need to be studied further. In this case, structural physical parameters are spatially non-uniform or periodic and thus, its vibration control differs from those researches.
In terms of conformation, periodic structures with spatially periodic distribution parameters have special dynamic characteristics, which have been studied on characteristic frequencies,52–60 modal localization and buckling,61–64 quasi-periodic distribution parameter effects65–73 and control application74–86 based on transfer matrix method, spatial harmonic expansion method, and finite element method, etc.87–93 However, the periodicity design has not been applied, but can be applied to improve composite structure dynamics. Therefore, periodic sandwich structure with MRVE core needs to be studied for dynamic optimization or vibration control. The periodic composite structure has MRVE dynamic properties adjustable by only applied magnetic fields while the structural design is unchanged, that can be as an active spatial periodicity control. Other geometrical periodicity design can be as passive spatial control. The active-passive spatial periodicity control is proposed in the present study. For the periodic composite structure, much more modes will be considered in analysis due to conventional vibration modes coupled with periodic distribution parameters. Its vibration equations are partial differential equations with space-varying parameters and random excitations, to which direct numerical solution is unsuitable for stochastic response statistics under various spatial parameters. Then analysis solution to the equations is an alternative. A periodic sandwich beam with MRVE core under random loading has been studied, and results show its dynamic properties can be adjustable largely by periodic distribution parameters. 94 However, periodic sandwich plate with controllable visco-elastomer (VE) core (such as MRVE core) has not been studied and thus, needs to be studied further for dynamic optimization or vibration control of general two-dimensional structures.
In this paper, a class of controllable VEs such as MRVE is considered as the core of a sandwich plate. The VE sandwich plate with distributed supported masses is used for modeling a structural system in which vibration-sensitive instruments are supported on a planar structure. The VE sandwich plate is designed as spatially periodic for dynamic optimization or vibration control. The stochastic response characteristics of the sandwich plate with controllable VE core and distributed masses under random loading are studied, in which geometrical and physical parameters have harmonic distribution. First, both facial layer thickness and core layer modulus of the sandwich plate are considered as harmonic distribution in length and width directions. The masses are considered as periodic distribution on the plate. Second, partial differential equations for transverse and longitudinal coupling motions of the sandwich plate system are derived. Third, the equations are converted into coupling ordinary differential equations according to the Galerkin method. Fourth, an analysis solution with frequency response function and response spectral density expressions of the sandwich plate system is obtained based on random dynamics theory. Finally, numerical results are given to show the effects of the harmonic geometrical and physical parameters and distributed masses on stochastic response characteristics of the plate.
Vibration equations of sandwich plate with harmonic distribution parameters under random loading
A sandwich plate with controllable VE (or adjustable dynamics) core and supported concentrated masses is shown in Figure 1, where facial layer thickness and core layer modulus are spatial harmonic functions (in coordinates x and y directions) and masses are distributed periodically. Length and width of the plate are a (direction x) and b (direction y), respectively. Two facial layers have identical Young’s modulus E1, mass density ρ1 and thickness h1. Middle core layer has mass density ρ2 and thickness h2. The distributed masses are fixed on the plate. The ith distributed mass has mass mi × ab, while its size is very small compared with the plate length and width and thus is neglected. The sandwich plate is subjected to transverse base motion loading. The base has displacement w0 which is a random loading.
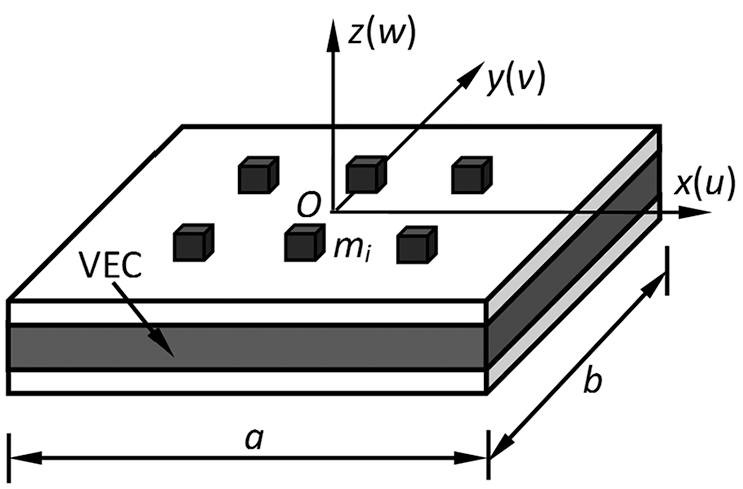
Sandwich plate with visco-elastomer core (VEC) and distributed masses.
The VE core has adjustable dynamic properties (e.g. MRVE has damping and stiffness adjustable by applied magnetic fields). The Young’s modulus of the core layer is much smaller than that of the facial layers and thus is neglected. The shearing deformation is larger than that of the facial layers and needs to be considered. Based on viscoelastic dynamic stress-stain relation, shear stresses τ2xz and τ2yz of the core are expressed by the corresponding shear strain γ2xz and γ2yz as


where t is time variable, modulus parameters G2a and G2c are adjustable, for example, by applied magnetic fields. They vary harmonically with coordinates x and y, and are expressed as


where ea1 and ec1 are non-harmonic parts of the shear modulus parameters G2a and G2c, respectively, ba1 and bc1 are wave amplitudes of harmonic parts of the shear modulus parameters, ka and kb are wave numbers of harmonic parts of the shear modulus parameters. Thus, the shear modulus of the core is adjustable as actively spatial periodic design. The facial layer thickness is also designed to be varying harmonically with coordinates x and y, and is expressed as

where c1m is non-harmonic part of the thickness, b1r is wave amplitude of harmonic part of the thickness, k1 and k2 are wave numbers of harmonic part of the thickness. Thus, the facial layer thickness is periodic as passively spatial design and needs to be optimized.
For the sandwich plate, it is assumed that (1) the facial layer materials are isotropic while the core material is transversely isotropic, for example, under applied magnetic fields along z-axis; (2) normal stresses of the core layer are small and neglected; (3) normal stresses of the facial layers in z-axis direction are small and neglected; (4) transverse displacements of the sandwich plate are considered as invariant along the thickness; (5) a cross section of each facial layer is perpendicular to its axis line, and each cross section of the core layer is a plane in deformation; (6) longitudinal and rotational inertias of the plate are small and neglected; (7) interfaces between the facial layers and core layer are continuous all the time.47,95,96
Based on the above assumptions, transverse plate displacement relative to base is w = w(x,y,t). Horizontal displacements of upper and lower facial layers along x-axis and y-axis are expressed, respectively as




where u10, v10, u30, and v30 are mid-layer displacements of the upper and lower facial layers, respectively, z1 and z3 are local transverse coordinates of the two facial layers. By using the displacements on upper and lower interfaces of the sandwich plate, shear strains of the core can be obtained as


where ha = h1 + h2. Substituting strains (10) and (11) into expressions (1) and (2) yields the shear stresses of the core
Horizontal normal strains and shear strains of the upper and lower facial layers can be obtained using geometrical relations with displacements (6)–(9). The corresponding normal stresses and shear stresses are respectively


where μ is Poisson’s ratio of the facial layers. By using equilibrium conditions in x and y directions with equations (14)–(19) and boundary conditions, the other shear stresses of the upper and lower facial layers are obtained as
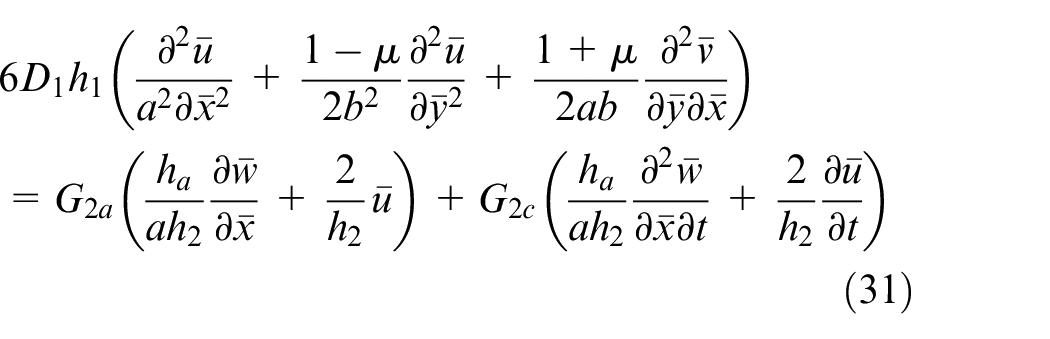
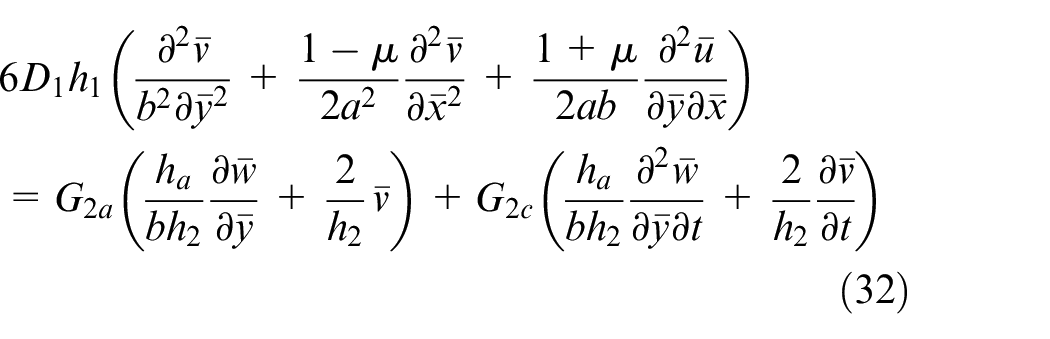
Based on continuity conditions of the shear stresses on the interfaces between the facial layers and core layer of the sandwich plate, the differential equations for the longitudinal displacements are obtained as
where u = u10 = −u30 and v = v10 = −v30. The dynamic equation of the sandwich plate element with distributed masses in z direction is
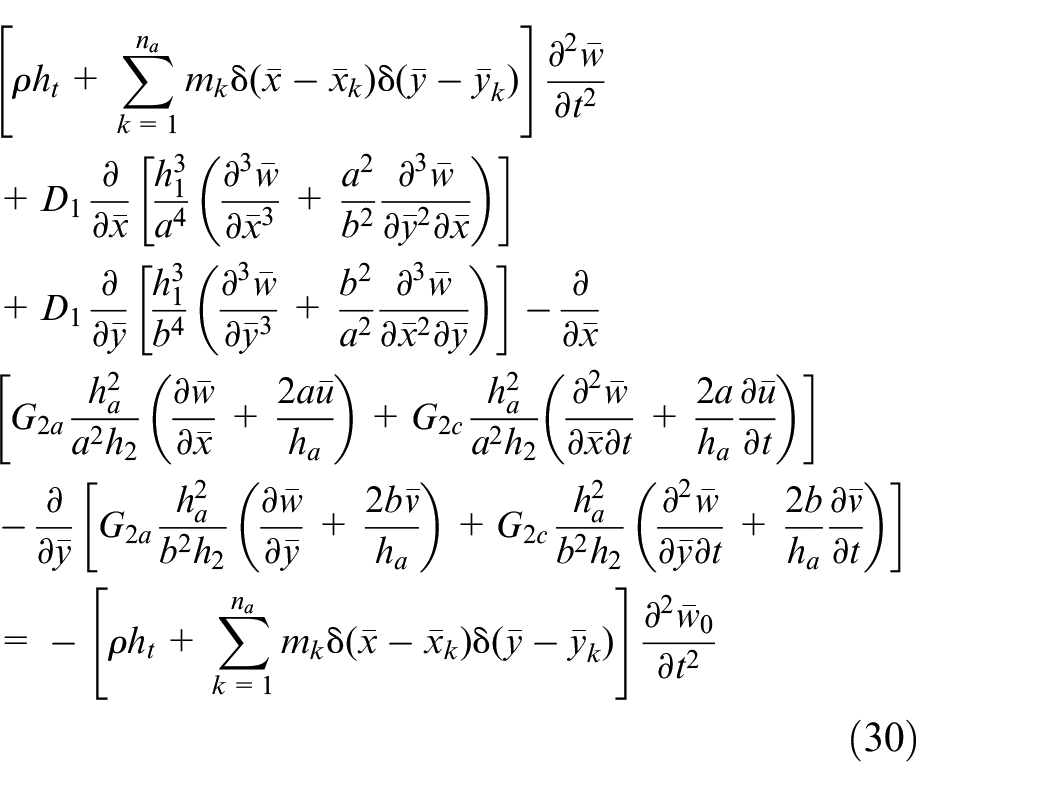
where δ(.) is the Dirac delta function, na is total number of masses, (xk, yk) are coordinates of the kth mass, ρht = 2ρh1 + ρh2 and ht = 2h1 + h2. Substituting shear stresses (12), (13), and (20)–(23) into equation (26) yields the differential equation for the transverse displacement of the sandwich plate
where D1 = E1/6(1 − μ2). The partial differential equations (24), (25), and (27) describe coupled transverse and longitudinal motions of the VE sandwich plate with distributed masses under base loading, where coefficients are harmonic functions of coordinates x and y. Boundary conditions for various constrained sandwich plates have been given. The boundary conditions for simply supported rectangular plate are
Introduce non-dimensional (ND) coordinates and displacements as follows
where wa is amplitude of the base motion w0. The differential equations (27), (24), (25), and the boundary conditions (28) become
Stochastic response analysis of periodic sandwich plate
Based on the homogeneous boundary conditions (33), the ND vibration displacements of the sandwich plate can be expanded as



where rij(t), sij(t), and qij(t) are functions of time, N1 and N2 are integers. According to the Galerkin method, substituting displacements (34)–(36) into equations (30)–(32), multiplying the equations by

where generalized excitation vector

Elements in the above matrices and vectors are determined by spatial integrals of coefficients in equations (30)–(32).
Equation (37) represents a stochastically excited multi-degree-of-freedom system derived from the sandwich plate with harmonic parameters and distributed masses under base loading. The system has the generalized mass, damping and stiffness dependent on harmonic distribution parameters k1, k2, ka, kb, b1r, ba1, and bc1. Vibration response of the plate system can be estimated by using power spectral density function. Frequency response function and response spectral density matrices of the system (37) are obtained as


where ω is vibration frequency,

where
Response statistics of the sandwich plate system subjected to random loading can be estimated using the spectral density function. For instance, the mean square displacement response of the plate is

where E[·] denotes expectation operation of a stochastic process, which is equal to average over time domain for an ergodic stationary process. Based on the spectral density function (41), response characteristics of the sandwich plate adjustable by harmonic geometrical and physical parameters can be explored.
Numerical results and discussion
To show the response adjustable performance, consider a VE sandwich plate with harmonic parameters and distributed masses under base loading, which model a system with vibration-sensitive instruments supported on floor under random environmental disturbances.3,47 It has basic parameter values as follows: a = 4 m, b = 2 m, ρ1 = 3000 kg/m3, ρ2 = 1200 kg/m3, E1 = 10 GPa, μ = 0.3, ea1 = 4 MPa, ba1 = βea1, ec1 = 0.006 MPaċs, bc1 = βec1, c1m = 0.05 m, b1r = αc1m, h2 = 0.2 m, na = 1, x1 = y1 = 0, m1 = 240 kg/m2, α = 0.3, β = 0.5, wa = 1, and the loading is considered as white noise with power spectral density of 1.0 × 106 unless otherwise specified. Numbers N1 and N2 in expansion (36) are determined based on the convergence of displacement responses. Numerical results on stochastic responses and response spectral densities on the plate midpoint are shown in Figures 2–16.
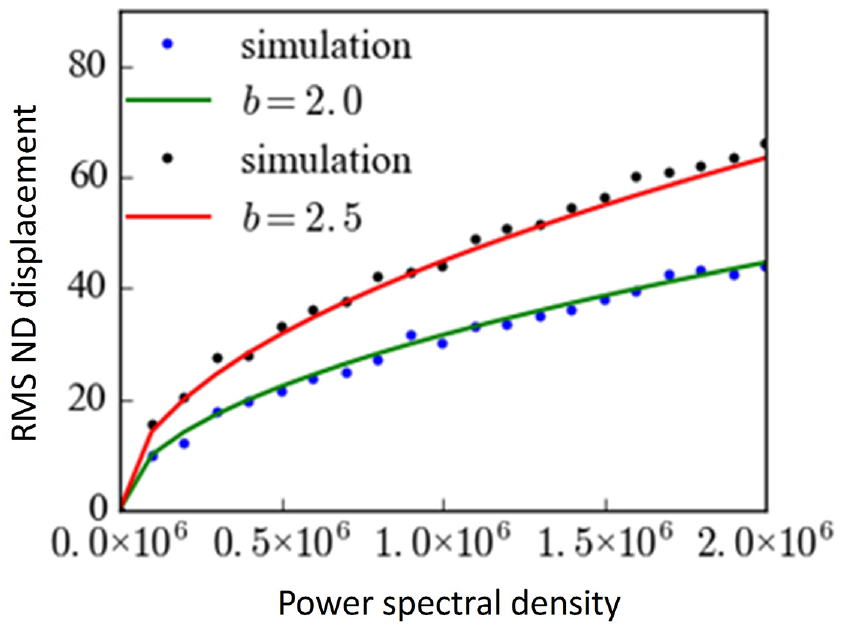
RMS ND displacement responses of the sandwich plate versus power spectral density of base loading.
LND displacement response spectra of the sandwich plate for different plate widths b.
LND displacement response spectra of the sandwich plate for different thickness wave numbers k1.
LND displacement response spectra of the sandwich plate for different thickness wave numbers k1.
LND displacement response spectra of the sandwich plate for different thickness wave numbers k2.
LND displacement response spectra of the sandwich plate for different non-periodic parts of the thicknesses c1m.
LND displacement response spectra of the sandwich plate for different parameters α.
LND displacement response spectra of the sandwich plate for different modulus wave numbers ka.
LND displacement response spectra of the sandwich plate for different modulus wave numbers kb.
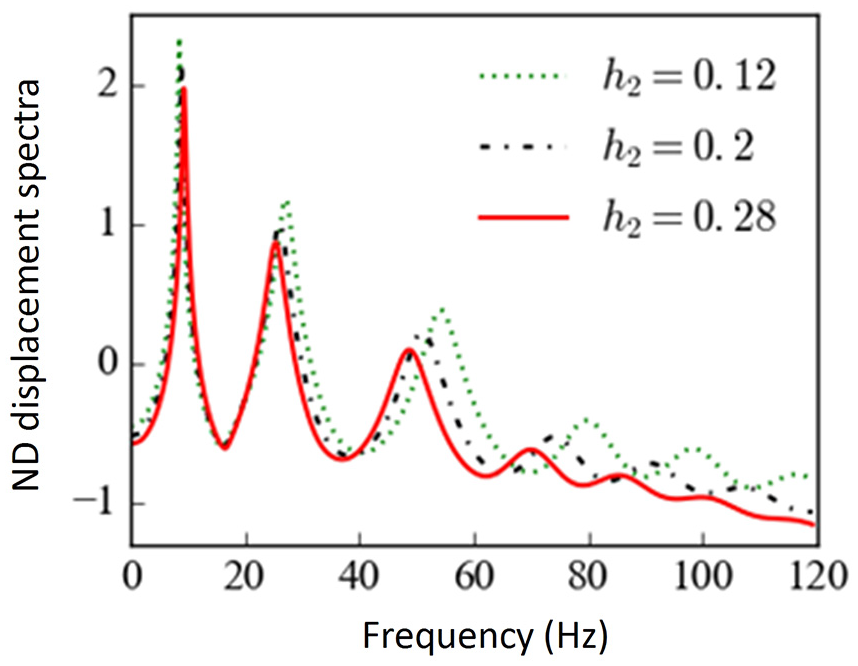
LND displacement response spectra of the sandwich plate for different core layer thicknesses h2.
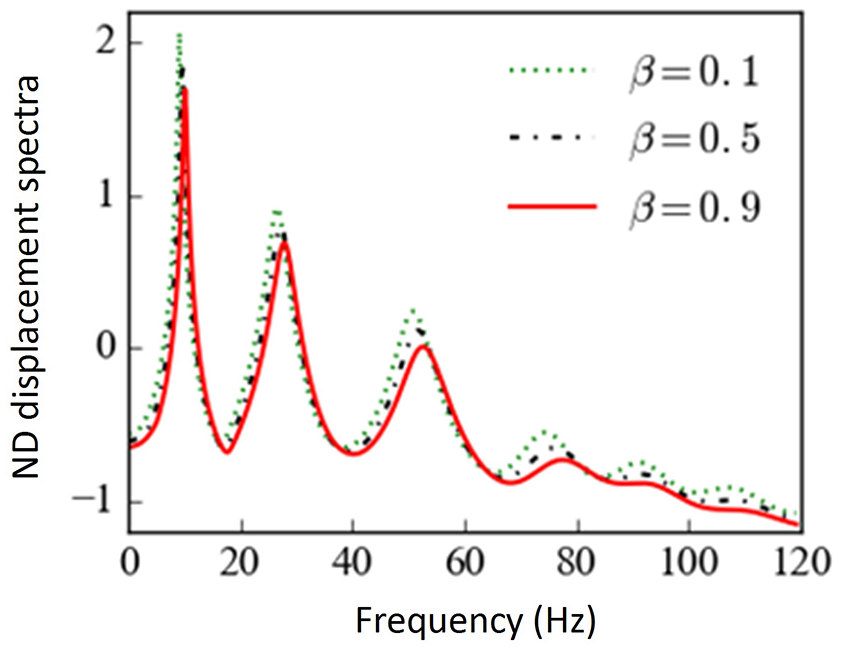
LND displacement response spectra of the sandwich plate for different parameters β.
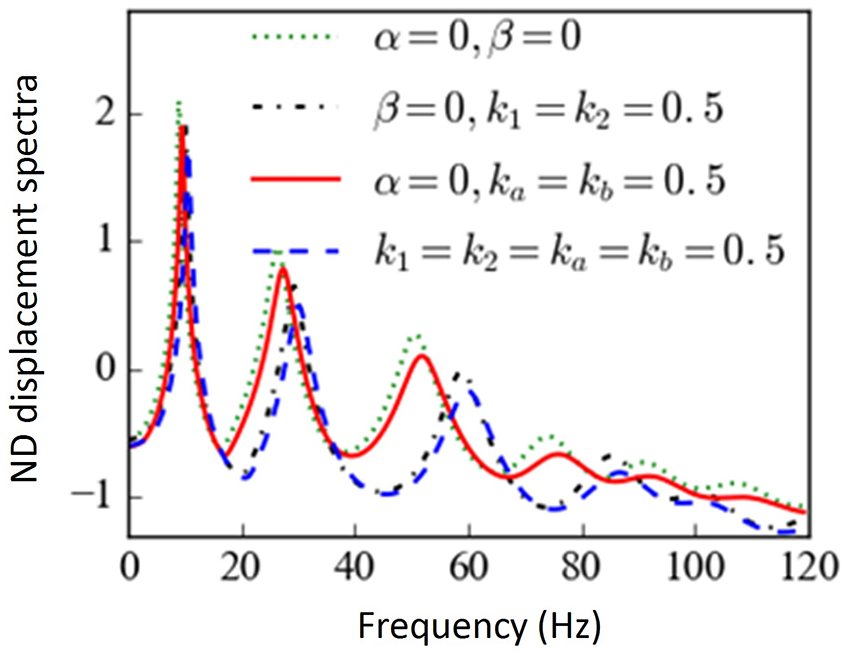
LND displacement response spectra of the sandwich plate for different wave amplitude ratios α and β.
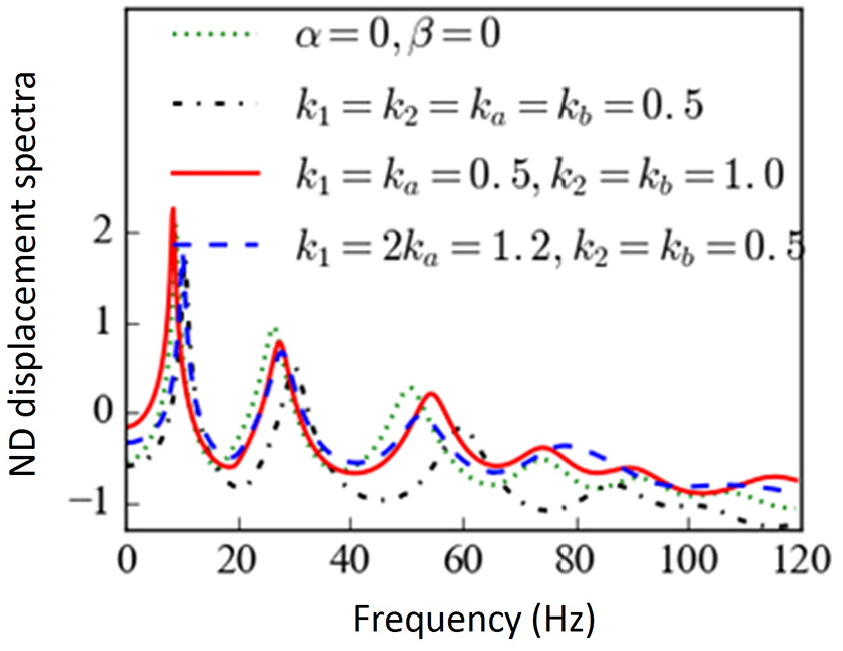
LND displacement response spectra of the sandwich plate for different wave numbers k1, k2, ka and kb.
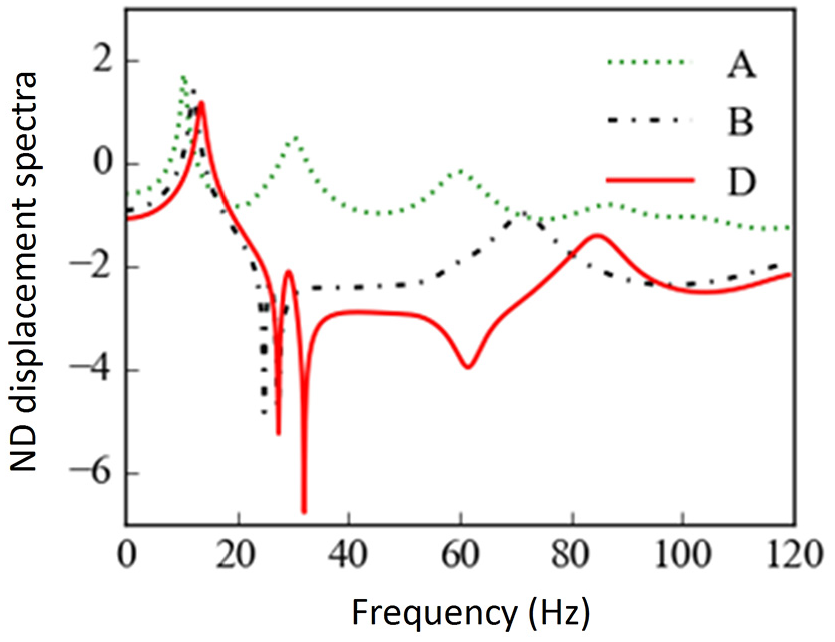
LND displacement response spectra of the sandwich plate with distributed masses for cases A, B and D.
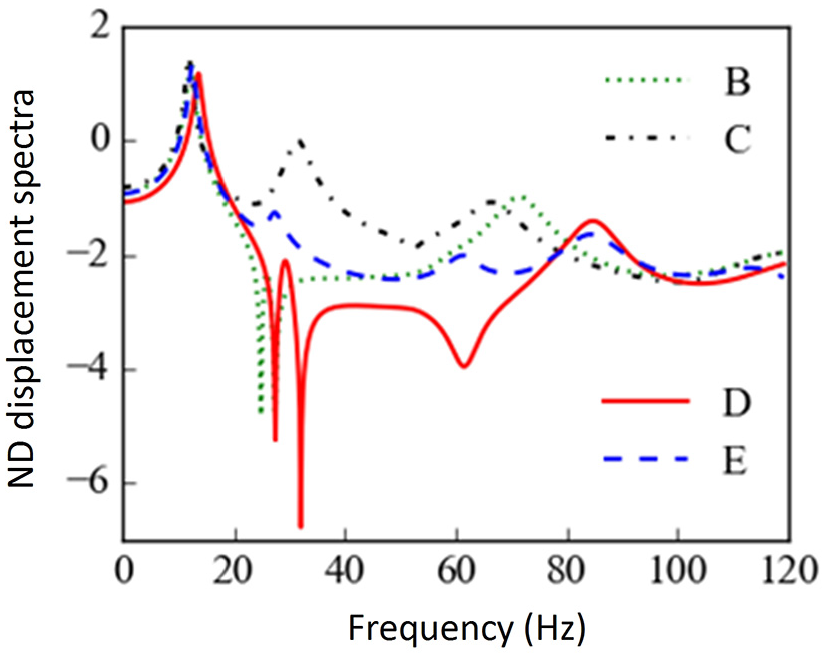
LND displacement response spectra of the sandwich plate with distributed masses for cases B, C, D, and E.
Figure 2 shows that the root-mean-square (RMS) ND displacement (
Influence of sandwich plate width
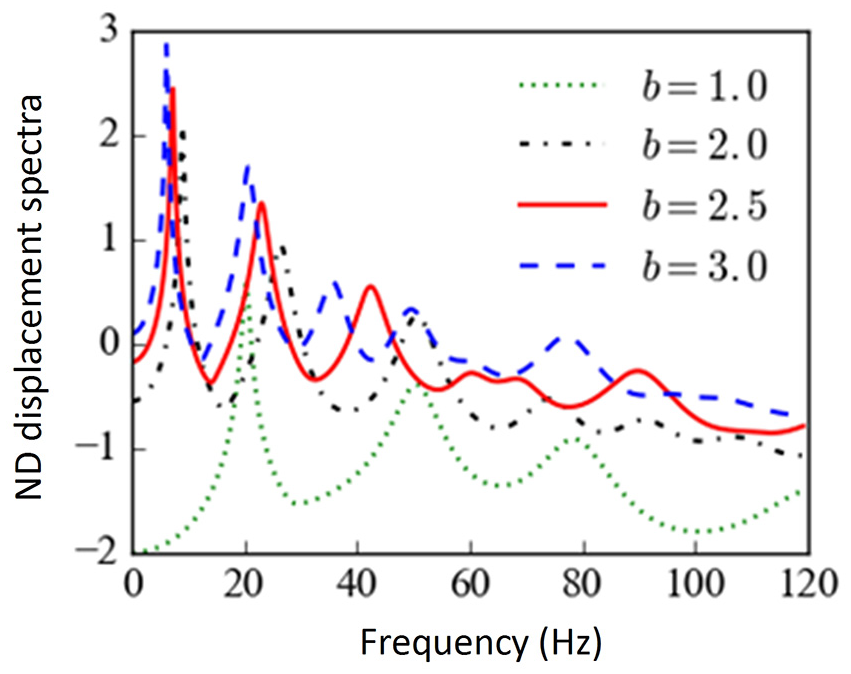
The influence of the sandwich plate width on the ND displacement response spectra is considered (α = 0, β = 0). Figure 3 shows the logarithmic ND (LND) displacement response spectra of the plate for different plate widths b. Many peaks and valleys can be seen, which indicate possible resonances and anti-resonances. As the plate width increases from 1.0 to 3.0 m, the first and second resonant frequencies decrease from 20.3 to 6.2 Hz and from 50.6 to 20.7 Hz, respectively. However, the first and second resonant response amplitudes increase from 3.75 to 729.7 and from 0.41 to 49.5 (non-logarithmic), respectively, as well as the anti-resonant response amplitudes. Thus, the width and length of the sandwich plate have large effects on the response characteristics and need to be determined suitably.
Influence of harmonic facial layer thickness
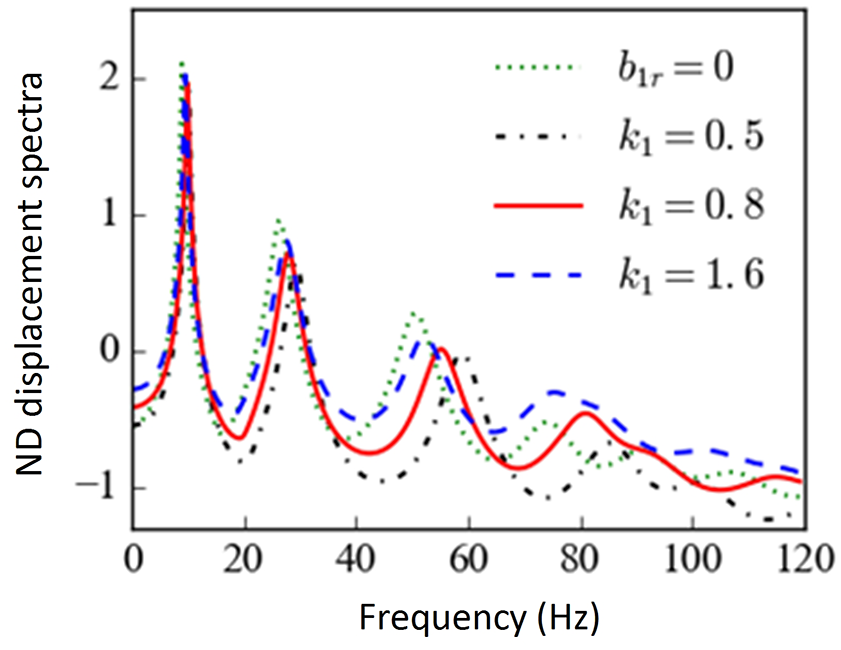
The influence of harmonic distribution of the facial layer thickness on the ND displacement response spectra of the sandwich plate is explored based on numerical results in Figures 4–8 (β = 0). Figure 4 shows the LND displacement spectra of the sandwich plate for different thickness wave numbers k1 (in x direction) (k2 = 0.5, α = 0.3). The sandwich plate with harmonic thickness in multi-mode coupling vibration has multiple response resonances. The spectral peaks of the first, second, and third resonances of the harmonic plate are smaller than those of the non-harmonic plate (b1r = 0), respectively (e.g. the non-logarithmic spectral amplitude of the first resonance is 124.9 for the non-harmonic plate, while the spectral amplitude of the first resonance is 86.2, 90.6, 103.5 for the harmonic plate with wave number k1 = 0.5, 0.8, 1.6, respectively). Meanwhile, the wave number k1 has certain effects on the resonant frequencies, for example, the third resonant frequency of the harmonic sandwich plate is 58.9, 55.1, and 52.4 Hz for wave number k1 = 0.5, 0.8, 1.6, respectively.
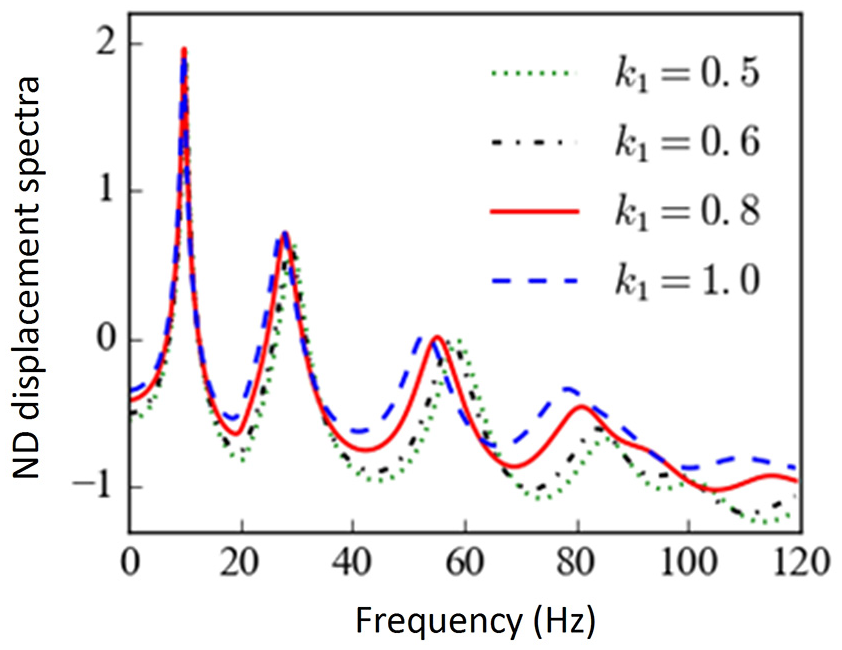
Figure 5 shows further the effects of the thickness wave number k1 on the LND displacement response spectra of the sandwich plate. It is seen that the spectral peak of the first resonance has a minimum value (non-logarithmic 78.9) when the thickness wave number k1 ≈ 0.6. The spectral valley of the first anti-resonance has a minimum value when the thickness wave number k1 ≈ 0.5. Thus, the thickness wave number k1 has large effects on the vibration response of the harmonic sandwich plate. The response has various adjustable performances in different vibration frequency bands by suitably choosing the wave number.
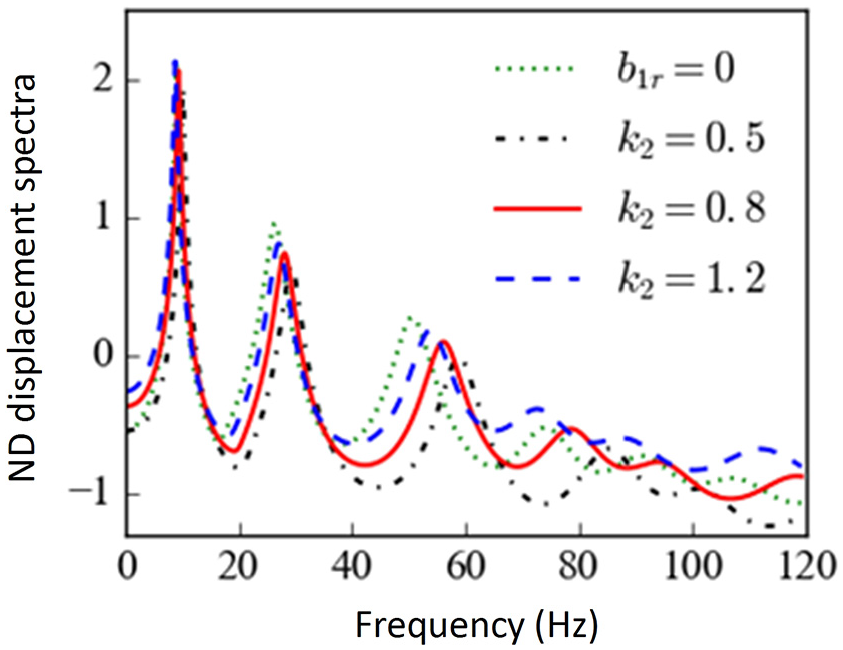
Figure 6 shows the LND displacement spectra of the sandwich plate for different thickness wave numbers k2 (in y direction) (k1 = 0.5, α = 0.3). It is seen that the wave number k2 similar to k1 has large effects on the resonant response amplitudes and frequencies. For instance, the non-logarithmic spectral amplitude of the second resonance is 8.99 for the non-harmonic plate and 4.46, 5.48, 6.43 for the harmonic plate with wave number k2 = 0.5, 0.8, 1.2, respectively. The spectral peaks of the first, second, and third resonances of the harmonic sandwich plate are smaller than those of the non-harmonic sandwich plate.
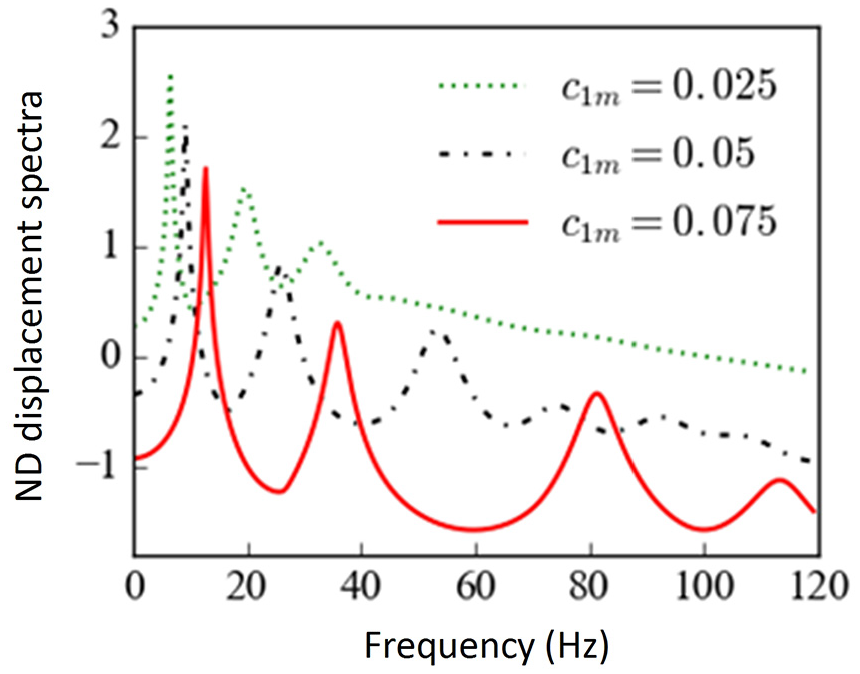
Figure 7 shows the LND displacement response spectra of the sandwich plate for different non-harmonic parts of the thickness c1m (k1 = 2.8, k2 = 0.8). As the non-harmonic part c1m increases, the spectral peaks and valleys of the first, second, and third resonances and anti-resonances decrease, while the first, second, and third resonance frequencies increase due to the plate stiffness increasing.
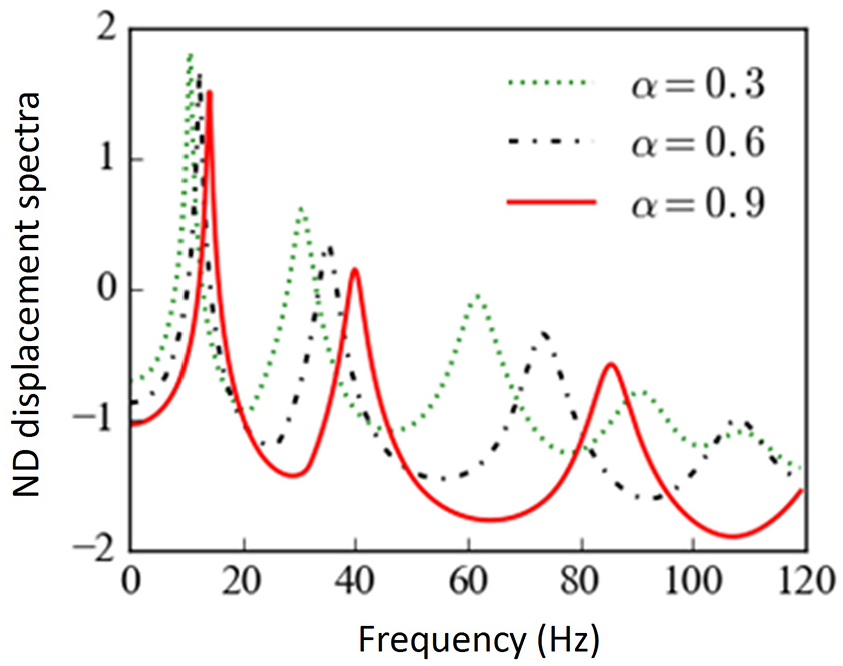
Figure 8 shows the LND displacement response spectra of the sandwich plate for different parameters α (ratio of harmonic part to non-harmonic part of the thickness) (β = 0, k1 = 0.4, k2 = 0.3). It is seen that the spectral peaks and valleys of the first, second, and third resonances and anti-resonances decrease, while the first, second and third resonant frequencies increase as the parameter α increases (e.g. the non-logarithmic spectral amplitude of the first resonance is 65.4, 48.3, 32.4, and the first resonant frequency is 10.6, 12.3, and 14.1 Hz for the parameter α = 0.3, 0.6, 0.9, respectively). The ratio of harmonic part to non-harmonic part of the thickness has large effects on the vibration response. Thus, the response has remarkable adjustable performance including resonant peaks and anti-resonant valleys by suitably choosing the wave amplitude or ratio of harmonic part to non-harmonic part.
Influence of harmonic core layer modulus
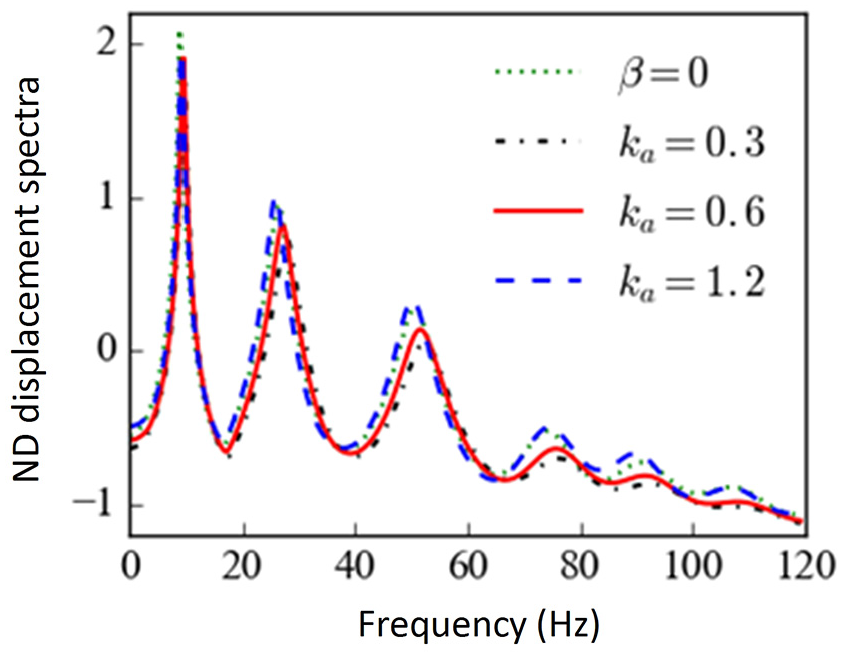
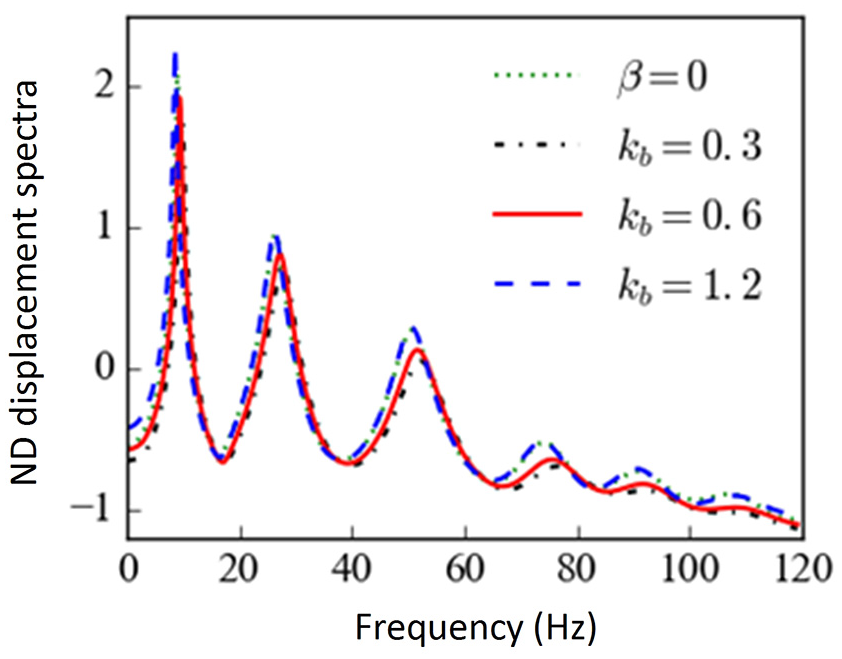
The influence of harmonic distribution of the core layer modulus on the ND displacement response spectra of the sandwich plate is explored based on numerical results in Figures 9–12 (α = 0). Figure 9 shows the LND displacement spectra of the sandwich plate for different wave numbers of the modulus ka (in x direction) (kb = 0.5, β = 0.5). It is seen that the spectral peak of the first resonance of the harmonic plate is smaller than that of the non-harmonic plate (β = 0) (the non-logarithmic spectral amplitude of the first resonance is 124.9 for the non-harmonic plate, while the spectral amplitude of the first resonance is 67.2, 80.4, 88.4 for the harmonic plate with wave number ka = 0.3, 0.6, 1.2, respectively). The wave number ka has certain effects on the resonant frequencies, for example, the third resonant frequency is 52.4, 51.6, and 50.2 Hz for wave number ka = 0.3, 0.6, 1.2, respectively. The spectral peak or valley of the resonant or anti-resonant response has a minimum value for an optimum value of the wave number ka. Similar results can be obtained by Figure 10 which shows the LND displacement spectra of the sandwich plate for different wave numbers of the modulus kb (in y direction) (ka = 0.5, β = 0.5). Thus, the wave numbers ka and kb of the modulus have large effects on the vibration response of the harmonic sandwich plate. The response has various adjustable performances in different vibration frequency bands by suitably choosing the wave numbers.
Figure 11 shows the LND displacement response spectra of the harmonic sandwich plate for different core layer thicknesses h2 (ka = 3.6, kb = 1.2, β = 0.5). As the thickness h2 increases, the spectral peaks of the first, second, and third resonances decrease, and the second and third resonance frequencies decrease.
Figure 12 shows the LND displacement response spectra of the sandwich plate for different parameters β (ratio of harmonic part to non-harmonic part of the modulus) (α = 0, ka = 0.6, kb = 0.4). It is seen that the spectral peaks and valleys of the first, second and third resonances and anti-resonances decrease, while the first, second, and third resonant frequencies increase as the parameter β increases (e.g. the non-logarithmic spectral amplitude of the first resonance is 115.9, 66.6, 49.1, and the first resonant frequency is 9.2, 9.8, and 10.2 Hz for the parameter β = 0.1, 0.5, 0.9, respectively). The ratio of harmonic part to non-harmonic part of the modulus has large effects on the vibration response. Thus, the response has remarkable adjustable performance including resonant peaks and anti-resonant valleys by suitably choosing the wave amplitude or ratio of harmonic part to non-harmonic part.
Influence of both harmonic thickness and modulus
The influence of harmonic distribution of both the thickness and modulus on the ND displacement response spectra of the sandwich plate is further illustrated by numerical results in Figures 13 and 14 (α = 0.3, β = 0.5). Figure 13 shows the LND displacement spectra of the sandwich plate for different wave amplitude ratios α and β (k1 = k2 = ka = kb = 0.5). The harmonic distribution of both the thickness and modulus (α = 0.3, β = 0.5) can reduce the spectral peaks and valleys of the first, second, and third resonances and anti-resonances more than the harmonic distribution of only the thickness (α = 0.3, β = 0) or only the modulus (α = 0, β = 0.5) (e.g. the non-logarithmic spectral amplitude of the first resonance is 86.2, 77.6, 52.8 for only the harmonic modulus β = 0.5, only the harmonic thickness α = 0.3, and both the harmonic thickness and modulus α = 0.3, β = 0.5, respectively). Figure 14 shows the LND displacement spectra of the sandwich plate for different wave numbers k1, k2, ka, and kb. The suitable wave numbers of harmonic thickness and modulus can further improve the vibration response characteristics of the sandwich plate.
Influence of periodically distributed masses
The influence of distribution of supported masses on the displacement response spectra of the harmonic sandwich plate is also considered in five cases. Case A is only one mass (240 kg/m2) on the plate with ND coordinates (0, 0). Case B is three equal masses (80 kg/m2) on the plate with ND coordinates (−0.25, 0), (0, 0), (0.25, 0), respectively. Case C is three equal mass (80 kg/m2) on the plate with ND coordinates (0, −0.25), (0, 0), (0, 0.25), respectively. Case D is five equal masses (48 kg/m2) on the plate with ND coordinates (−0.25, −0.25), (−0.25, 0.25), (0, 0), (0.25, −0.25), (0.25, 0.25), respectively. Case E is five equal mass (48 kg/m2) on the plate with ND coordinates (−0.25, 0), (0, −0.25), (0, 0), (0, 0.25), (0.25, 0), respectively. Numerical results on the ND displacement response spectra under different mass distributions are shown in Figures 15 and 16 (k1 = k2 = ka = kb = 0.5, α = 0.3, β = 0.5).
Figure 15 shows the LND displacement spectra of the sandwich plate for distribution cases A, B, and D. It is seen that the mass decentralization (different numbers of masses, but equal total mass) has large effects on the response spectrum including resonant peaks and anti-resonant valleys as well as resonant frequencies (e.g. the non-logarithmic spectral amplitude of the first resonance is 52.8, 24.7, 15.0, and the first resonant frequency is 10.5, 12.5, and 13.7 Hz for cases A, B, D, respectively). The mass decentralization can reduce the spectral peaks and valleys and then improve the vibration response characteristics of the harmonic sandwich plate.
Figure 16 shows the LND displacement spectra of the sandwich plate for distribution cases B, C, D, and E. It is seen that the suitable mass placement (equal number of masses, but different placements, e.g. B and C, D and E) can largely reduce the spectral peaks and valleys and then improve the vibration response characteristics. Thus, the response has remarkable adjustable performance including resonant peaks and anti-resonant valleys by suitable periodic distribution of masses supported on the harmonic sandwich plate.
Conclusions
The response adjustable performance of a visco-elastomer sandwich plate with harmonic geometrical and physical parameters and periodically distributed masses under random base motion loading has been studied for spatial periodicity control. The spatial harmonic distribution of facial layer thickness and core layer modulus of the sandwich plate is considered as well as the periodic distribution of the supported masses. The partial differential equations for transverse and longitudinal coupling motions of the sandwich plate with distributed masses under base loading are derived. The equations are further converted into multi-mode coupling vibration equations with stiffness, damping, and mass coefficients dependent on harmonic distribution parameters. The analysis solution to the equations is proposed, and the frequency response function and response spectral density expressions of the sandwich plate system are obtained, which are used for response adjustable performance analysis or dynamic optimization analysis of the periodic composite structure system.
Numerical results have demonstrated that: (1) the vibration response characteristics of the sandwich plate can be adjusted by plate width and length; (2) the vibration response characteristics of the sandwich plate can be improved largely by the harmonic distribution of geometrical and physical parameters, for example, the response amplitudes of resonances and anti-resonances can be remarkably reduced by suitably choosing wave numbers and wave amplitudes of the thickness and modulus; (3) the periodic mass distribution (decentralization and optimized placement) can largely improve the vibration response characteristics of the sandwich plate, including resonant and anti-resonant amplitudes. The results on response adjustable performance have a potential application to the stochastic vibration control or dynamic optimization design of smart composite structures with distributed masses through harmonic distribution of geometrical and physical parameters. However, an active temporal control strategy with the spatial periodicity strategy for the vibration control of visco-elastomer composite structures needs to be developed further.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the National Natural Science Foundation of China (grant number 12072312), the Research Grants Council of the Hong Kong Special Administrative Region (grant number R-5020-18), and the Innovation and Technology Commission of the Hong Kong Special Administrative Region (grant number K-BBY1).