
Abstract
The bearing is the core component of the gearbox transmission system. Once it is damaged during operation, it will cause the shutdown of the mechanical equipment for maintenance. It has important application significance to carry out fault detection and remaining useful life (RUL) prediction. Whereas, some bottlenecks, such as the noise interference of state characteristics, the excessive dependence of supervised learning on prior samples, and the practical RUL online calculation, restrict the industrial application of RUL prediction for rotating machinery equipment. To overcome the above problems, this paper introduces the discrete wavelet transform (DWT) to decrease the noise of the vibration acceleration signal obtained, and then uses the sliding average method to weaken the transient excitation. To make the state characteristics of the monitored bearing trendy, linear, and monotonic, this paper proposes a new set of state interpret indicators: energy and cumulative summation feature (CSF) to reflect the bearing health status. Based on the available bearing health information, the fault boundary threshold is established through the 3
Keywords
Introduction
The gear transmission is an extremely important energy conversion and transmission equipment that needs to withstand complex operating environments such as heavy load, variable load impact force, and high rotating speed. Its operating state directly determines the operating quality of mechanical transmission equipment.1–3 The bearing is the core component of the gearbox transmission system. If it is damaged during operation, it will cause the shutdown of the mechanical equipment for maintenance. For energy transfer devices such as automobile gearboxes and wind turbines, it is difficult to accurately determine the health state of internal transmission components such as bearings and gears. And mechanical components such as bearings and gears require a process from healthy to complete failure. Once a fault occurs, it is necessary to detect it in the early stage of the fault. A large number of studies for bearing fault diagnosis appeared such as oil analysis, temperature monitoring, acoustic emission, and vibration (vibration acceleration) analysis.4–10
In recent years, data-driven diagnosis methods based on machine learning and deep learning have attracted the most attention of researchers and have become a hot topic in the field of bearing fault diagnosis.11–13 At the same time, with the release of some typical public data sets, such as Case Western Reserve University (CWRU) Dataset, Paderborn University Dataset, PRONOSTIA Dataset, and Intelligent Maintenance Systems (IMS) Dataset. These data sets effectively promoted the in-depth development of data-driven fault diagnosis methods for rotating machinery. Based on data-driven prognostics and health management (PHM), many representative research results have emerged.14–16 In general, the research in this field can be divided into three steps, namely feature learning, fault classification, and prediction.
In terms of feature learning, it mainly embodies the processing and feature extraction of perceptual signals. Typical methods, such as wavelet decomposition, local mean decomposition (LMD), empirical mode decomposition (EMD), and variational mode decomposition (VMD),
17
show superiority in vibration signal transient component extraction, noise elimination, and fault frequency band separation. Aiming at the problem that it is difficult to adaptively decompose vibration acceleration signals, Yan et al.
18
proposed to adopt VMD based on waveform matching extension to optimize the internal parameters
In terms of fault classification, most diagnosis networks are supervised learning methods, that is, use the existing labeled data to train the recognition network and optimize the parameters to obtain a test network.22,23 Typical learning networks that have emerged in the past two decades include support vector machines (SVM), multi-layer perceptron (MLP), Bayesian, binary trees, and deep learning (DL) networks with very high computational consumption24–27 proposed for the first time a multi-layer extreme learning machine (ELM) network, which realized the compressed sensing and multi-label classification of the high-dimensional vibration signals of the bearing in the gearbox of the wind turbine. Yang et al. 28 proposed a feature-based transfer neural network (FTNN) to solve the problem of cross-domain learning of fault data for different bearings under different working conditions. A similar idea is also reflected in the fact that 29 adopted a domain adversarial transfer network based on an asymmetric encoder to effectively improve the efficiency of bearing cross-domain fault diagnosis.
For the remaining useful life (RUL) prediction, the current research objects are mostly concentrated on bearings, gears, cutter, and drill bits. In essence, the data-driven-based RUL prediction is the regression of machine learning networks. This is different from the traditional curve fitting method. The machine learning methods, such as SVM, MLP, and DL mentioned above, are also applicable to RUL prediction. For the determination the first predicting time (FPT), Li et al.
30
proposed to adopt the 3
However, there are still two key issues that need to be addressed to carry out RUL prediction for bearings, namely FPT detection and RUL prediction. The former is related to the anomaly monitoring of the bearing. RUL prediction task can only be carried out on the basis of detecting the FPT of the bearing. However, there are still gaps need to be filled. First, many data-driven fault diagnosis methods are based on prior experience, and the data needs to be labeled before the fault diagnosis is carried out so as to train the recognition network. Besides, the lack of cross-domain learning capabilities means that the adopted identification network can only be applied to the current monitored machine, but cannot perform fault diagnosis on other machine, therefore it is difficult to achieve large-scale migration and deployment. Second, the vibration amplitude (blue curve) of the bearing in accelerated aging experiment is shown in Figure 1. As the trend of bearing degradation continues to increase, the amplitude becomes larger and larger and eventually reaches the end-of-life (EoL), but the degradation process is always accompanied by irregular noise interference. This phenomenon brings uncertainty to the prediction of the RUL. Third, most of the existing research work can only realize fault diagnosis and prediction offline. However, in the actual industrial field, the online application of RUL prediction and anomaly detection is obviously more meaningful.
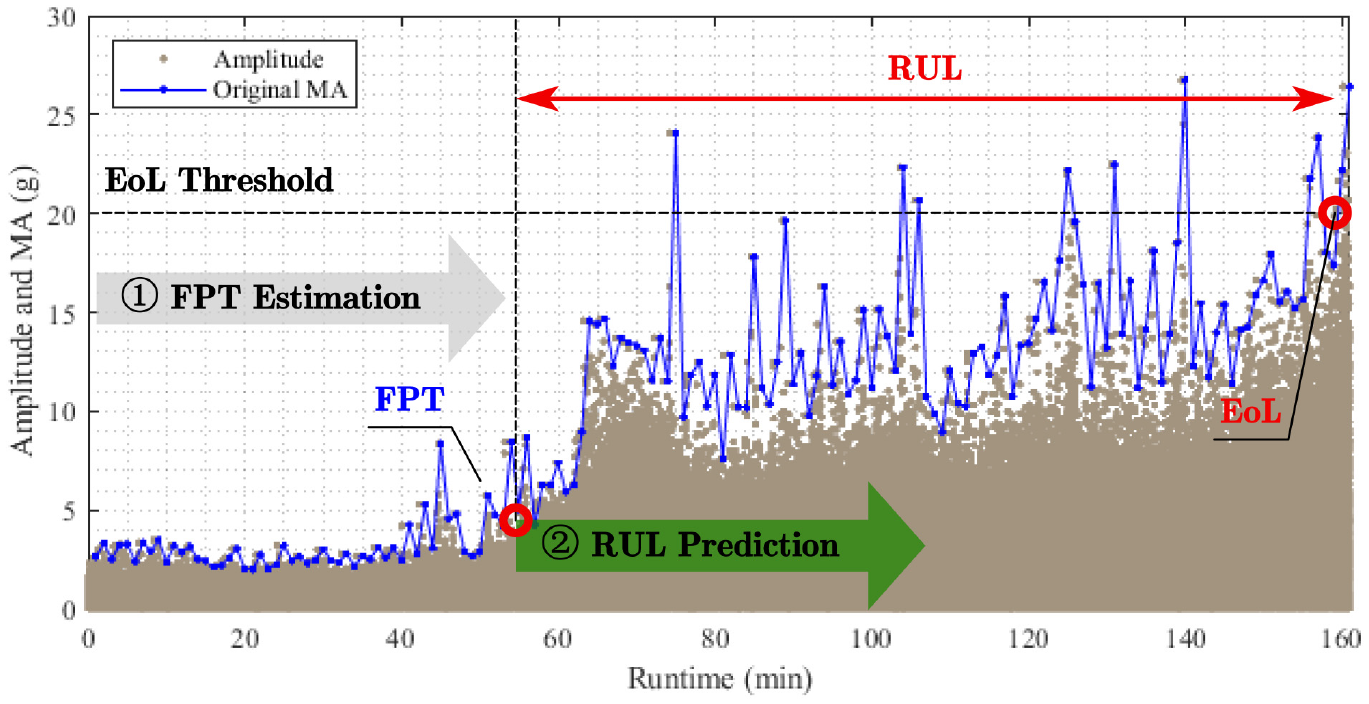
Full life cycle amplitude of the bearing.
To reduce the interference of high-frequency noise on the bearing state signal, this paper firstly introduces the discrete wavelet transform (DWT) to reduce the noise of the vibration acceleration signal obtained, and then selects the sliding average to weaken the transient excitation. To make the state characteristics of the monitored bearing trendy, linear, and monotonic, this paper proposes a new set of state interpret indicators: energy and cumulative summation feature (CSF) to reflect the health status of the bearing. Based on the bearing health status information, the fault boundary threshold is established through the
A new health evaluation indicator is proposed, which has good linearity and trend, and is conducive to the realization of a simple structure and low calculation amount of curve fitting calculation.
The unsupervised method is used to calculate the fault boundary threshold, which is based on the bearing state data in the healthy condition. Therefore, the proposed method is suitable for abnormal monitoring of a large number of rotating machinery.
The method proposed in this study meets the requirements of online computing and PHM tasks in the real industrial application, and maintains the parameter update and adaptability of the prediction network.
Experimental test bench and data description
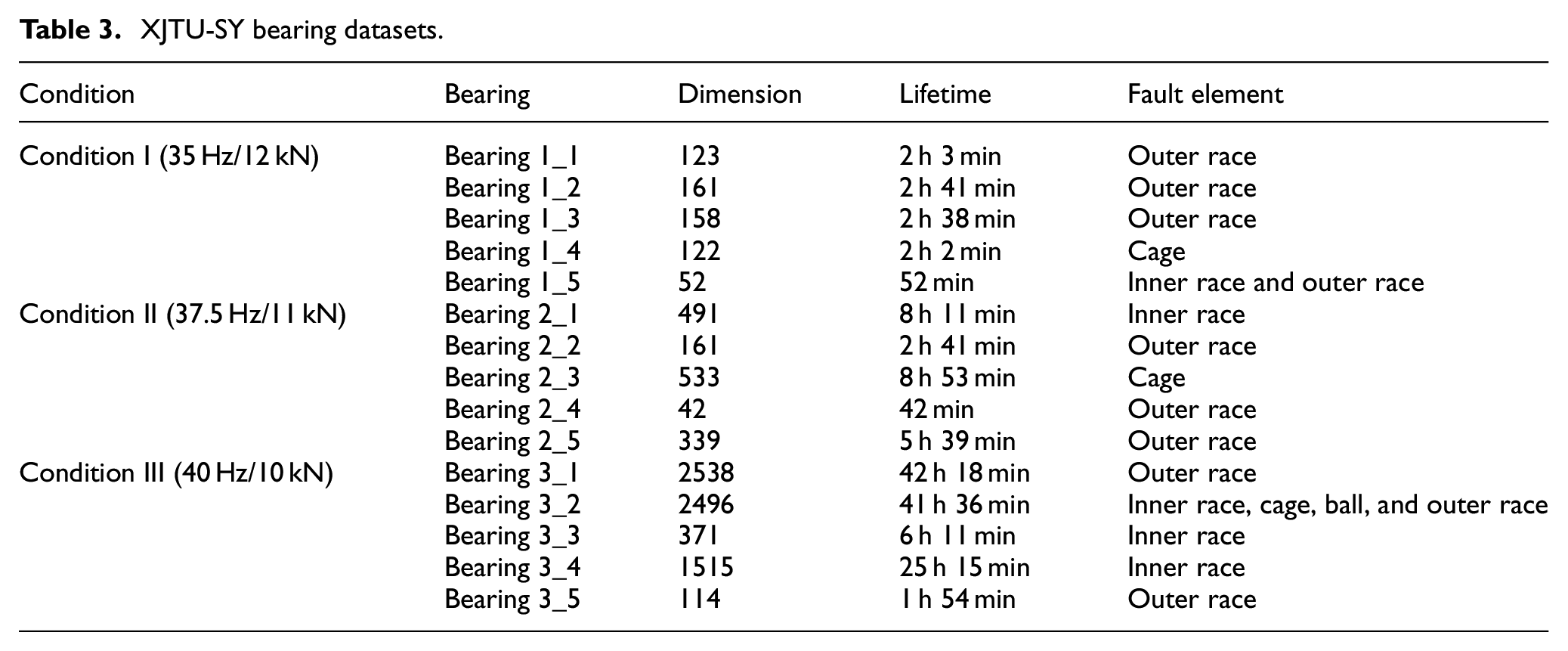
The experimental data, named XJTU-SY bearing dataset, comes from the Institute of Design Science and Basic Component, Xi’an Jiaotong University, 33 China. The test platform is shown in Figure 2. It includes an AC motor, a motor speed controller, a rotating shaft, a support bearing, hydraulic loading system, and test bearing. The adjustable working conditions of the test platform include radial force and speed. The radial force is generated by the hydraulic loading system and acts on the bearing seat of the test bearing. The speed is adjusted by the AC motor. The test bearing in this study is LDK UER204, and its related parameters are shown in Tables 1 and 2. A total of three types of working conditions were designed for the test. As shown in Table 2, there are five groups of bearings under each type of working condition. The sampling frequency is set to 25.6 kHz, the sampling interval is 1 min, and the length of each sample is 1.28 s. As shown in Table 3, there are a total of three operating conditions, and the test recorded the operating data of the full life of five sets of bearings under each operating condition.
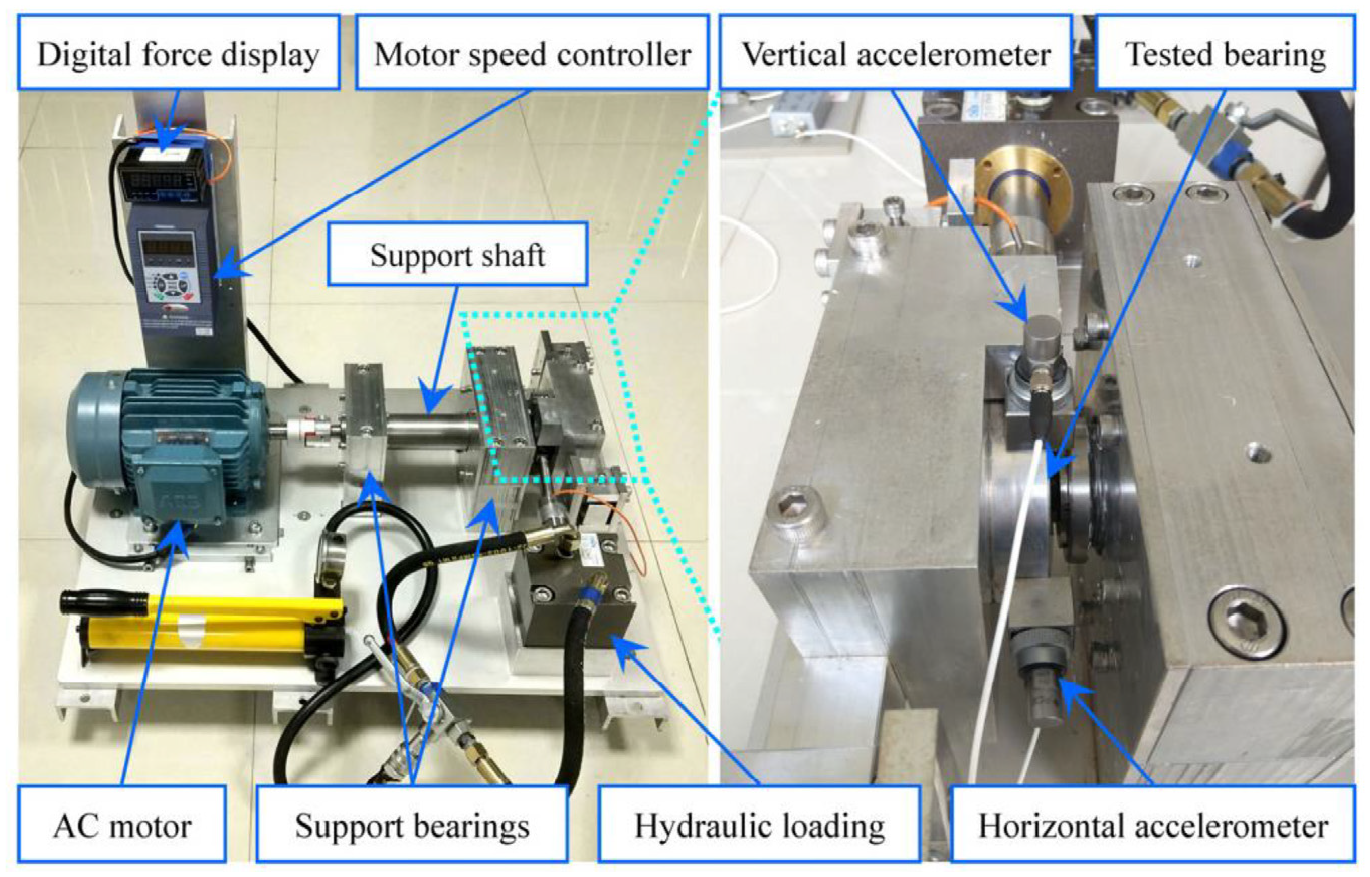
Testbed of rolling element bearings.
Parameters of tested bearings.

Bearing accelerated aging test conditions.

XJTU-SY bearing datasets.
As shown in Figure 3, the vibration acceleration amplitudes of the four sets of test bearings in the horizontal and vertical directions are given. The red curve represents the envelope of the amplitude. This paper uses this envelope as the original basis for bearing degradation. When the value exceeds 20 g, it can be judged that the bearing has reached the EoL point, and the bearing must be replaced. 33
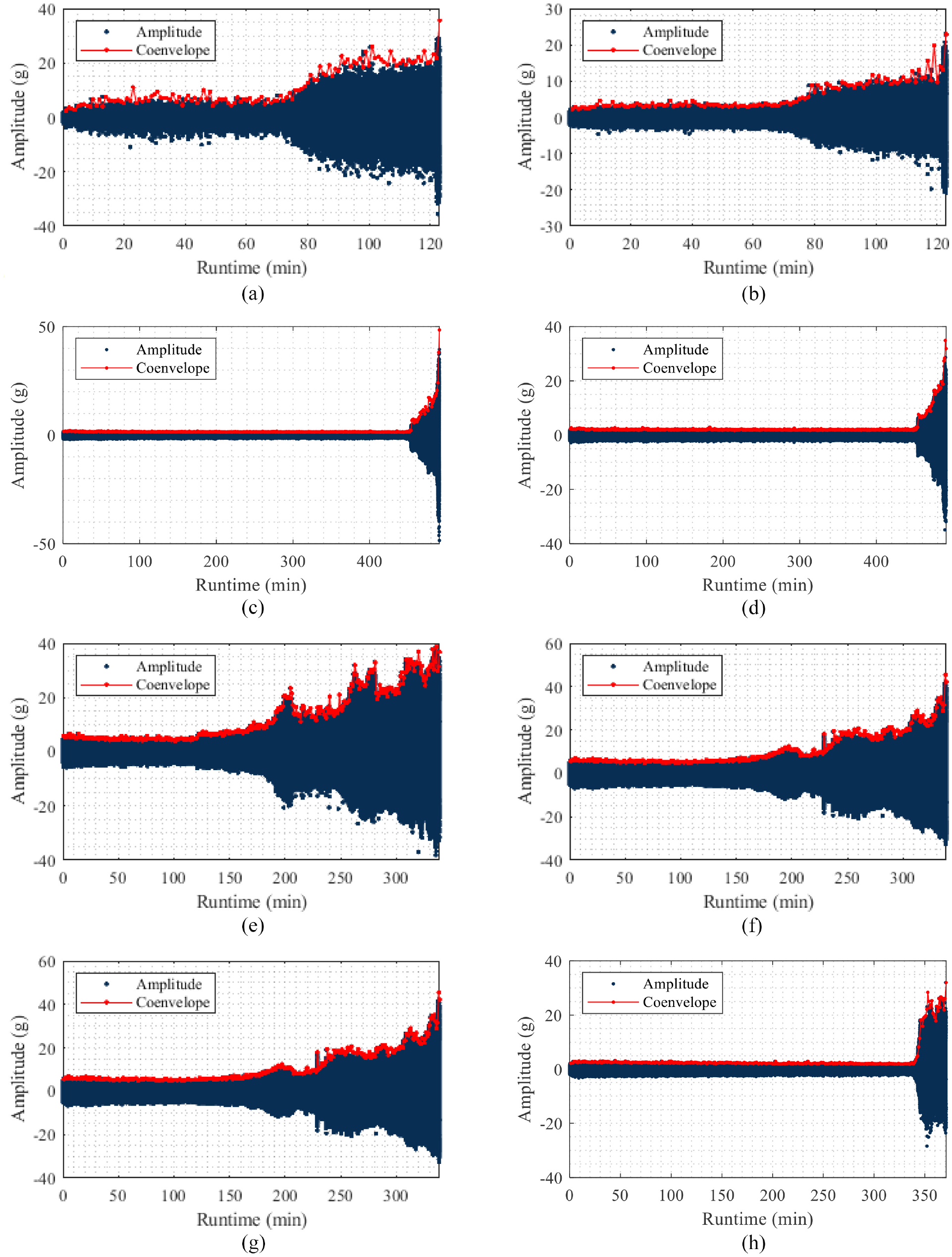
Horizontal and vertical vibration signals of four tested bearings: (a) Bearing 1_1 in horizontal direction, (b) Bearing 1_1 in vertical direction, (c) Bearing 2_1 in horizontal direction, (d) Bearing 2_1 in vertical direction, (e) Bearing 2_5 in horizontal direction, (f) Bearing 2_5 in vertical direction, (g) Bearing 3_3 in horizontal direction, and (h) Bearing 3_3 in vertical direction.
Framework and methodology
Proposed framework of this study
The framework proposed in this study is shown in Figure 4. It includes the following three aspects: high-frequency noise removal of sliding sequence, feature calculation based on energy and FPT detection, CSF, and equivalent EoL threshold calculation.
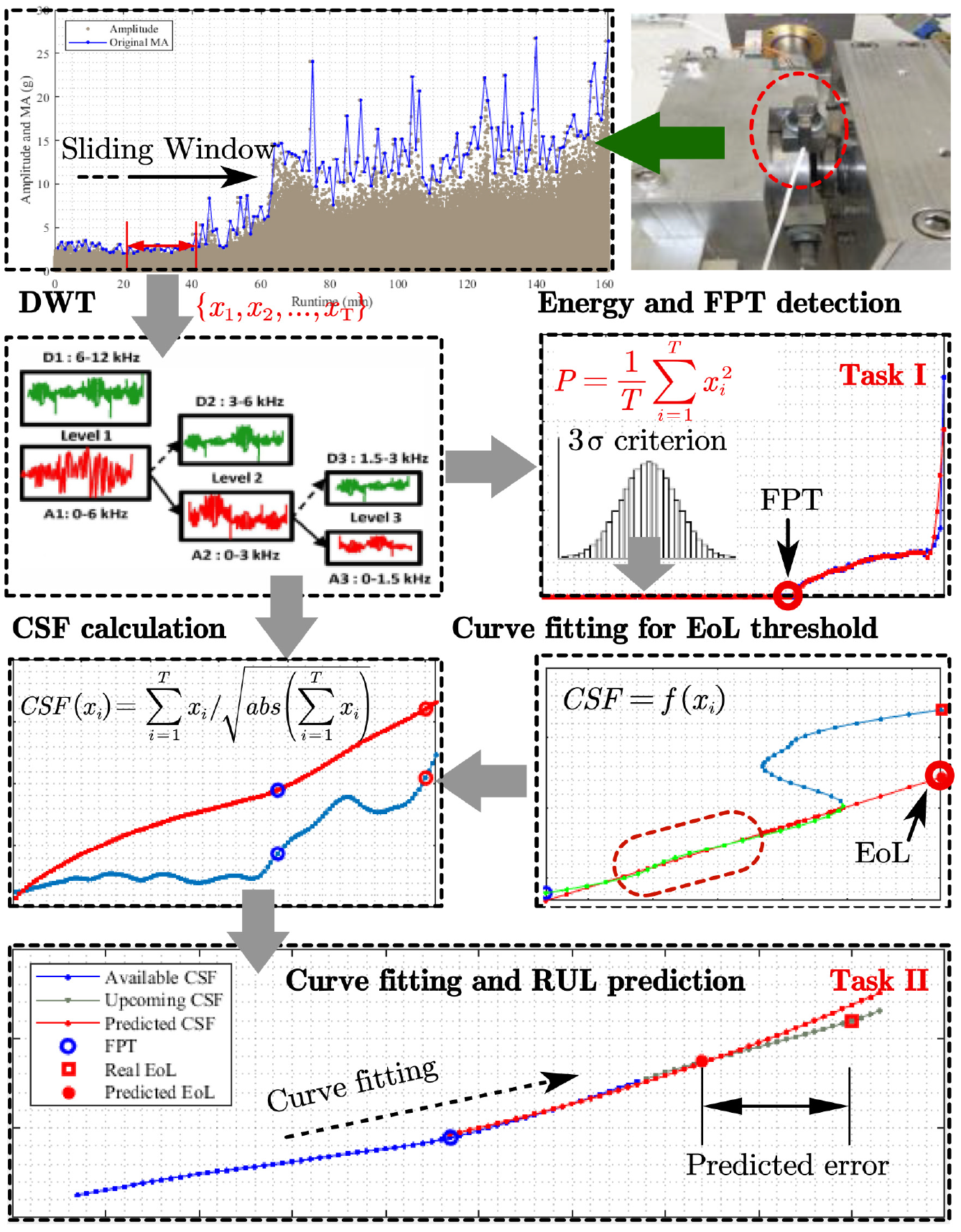
Proposed framework of FPT estimation and RUL prediction.
Regarding the removal of high-frequency noise in the sliding sequence, its purpose is to maintain the trend of low-frequency components of vibration acceleration as much as possible, reduce the interference of high-frequency noise on FPT detection (e.g., the transient excitation in Figure 1), and then improve FPT detection accuracy. In this paper, a three-layer structure of DWT is introduced to reduce the noise of the sliding sequence, and db4 is selected as the mother wavelet. In the FPT detection stage, this paper proposes to use the energy indicator to replace the original vibration acceleration amplitude as an evaluation index to determine the abnormality of the bearing. Compared with the amplitude, the energy value of the bearing state signal has a certain inertia to the response of the noise excitation, thus it can effectively avoid the “false abnormal state” decision-making. It is worth mentioning that this study uses health indicators for bearing abnormality monitoring, and uses 3
DWT for denoising
The function of DWT is to decompose signals on different scales, and the choice of different scales can be determined according to different goals. For bearing degradation data, the low frequency component is very important, it often contains the characteristics of the signal, and the high frequency component gives the details or differences of the signal. 34 DWT can reduce the impact of high frequency components. This paper applies Db4 as the mother wavelet, the number of decomposition layers is set to 3. As shown in equation (1), the eventual degradation feature is sum of several components.

where
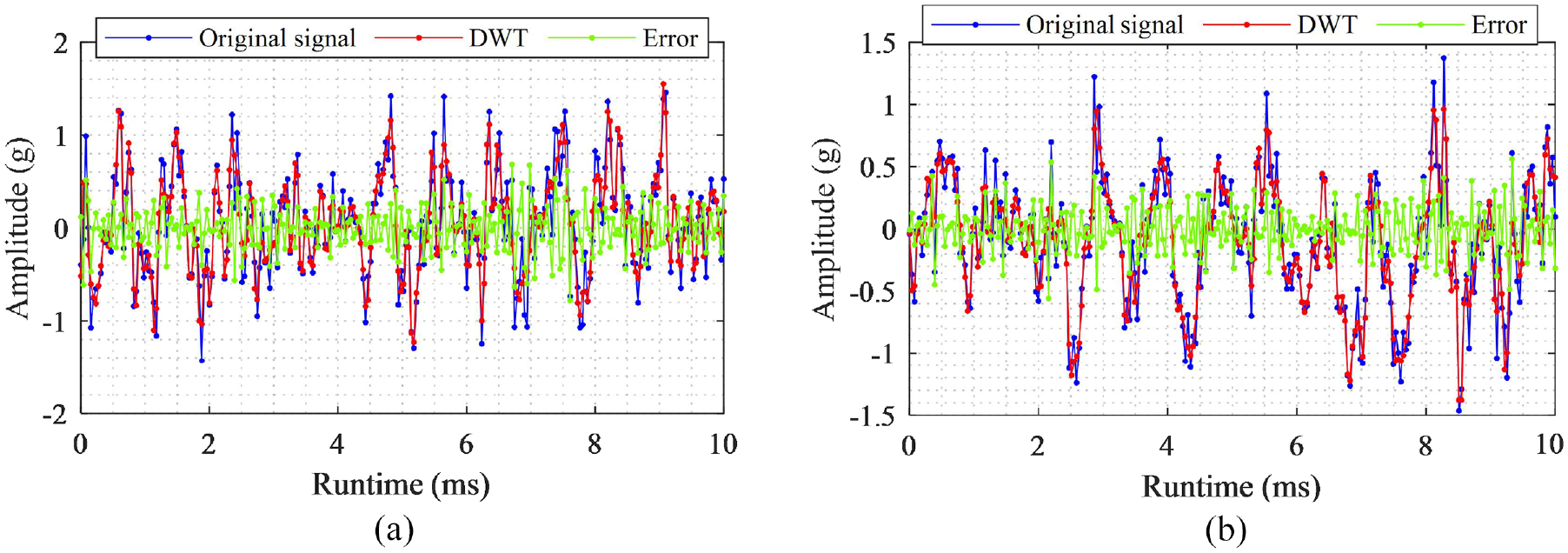
Vibration signals and its DWT denoising: (a) Bearing 1-1 in horizontal direction and (b) Bearing 1-1 in vertical direction.
Feature selection and CSF calculation
In this paper, energy is selected as an indicator to reflect the health of the bearing. There are other indicators for reference, such as root mean square, entropy, skewness, kurtosis, upper bound. Through it has been verified in our previous tests that the energy indicator is more stable in reflecting the degradation trend of bearing components. The expression of energy of this study is expressed as,

where

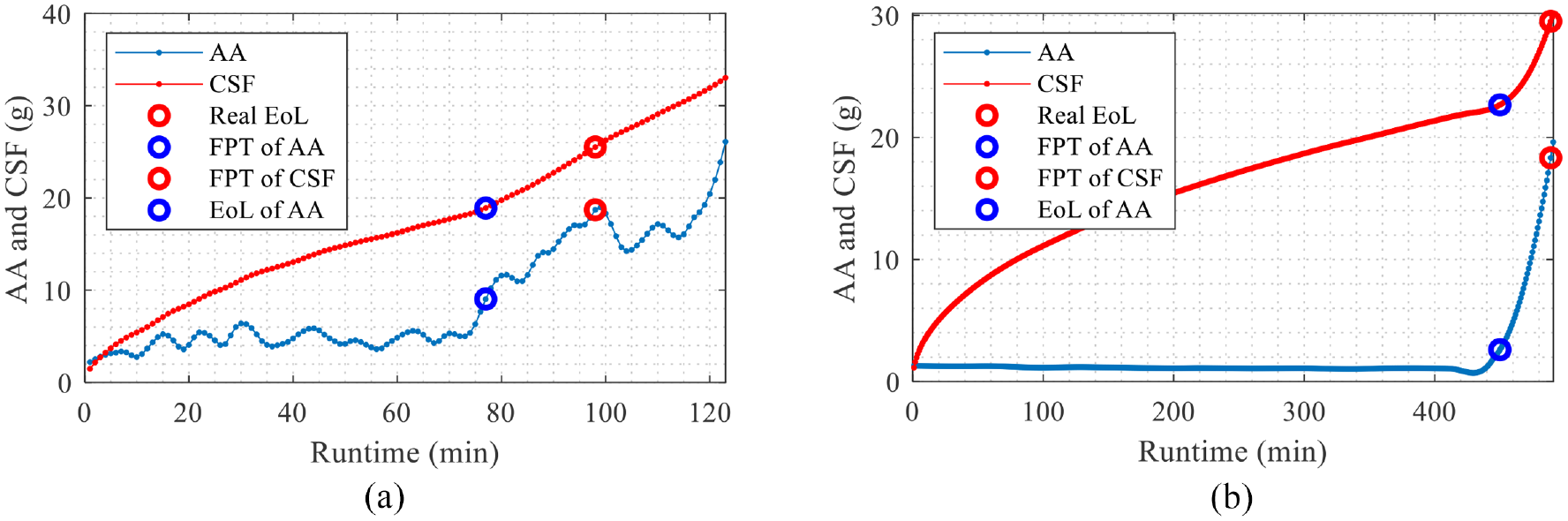
CSF and AA of bearings: (a) Bearing 1-1 in horizontal direction and (b) Bearing 2-1 in horizontal direction.
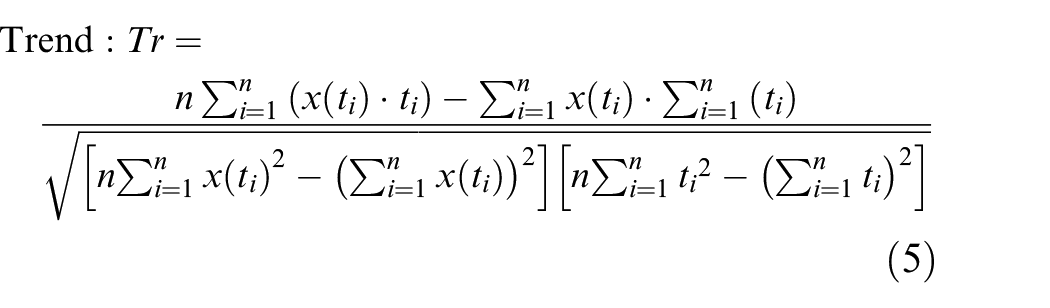
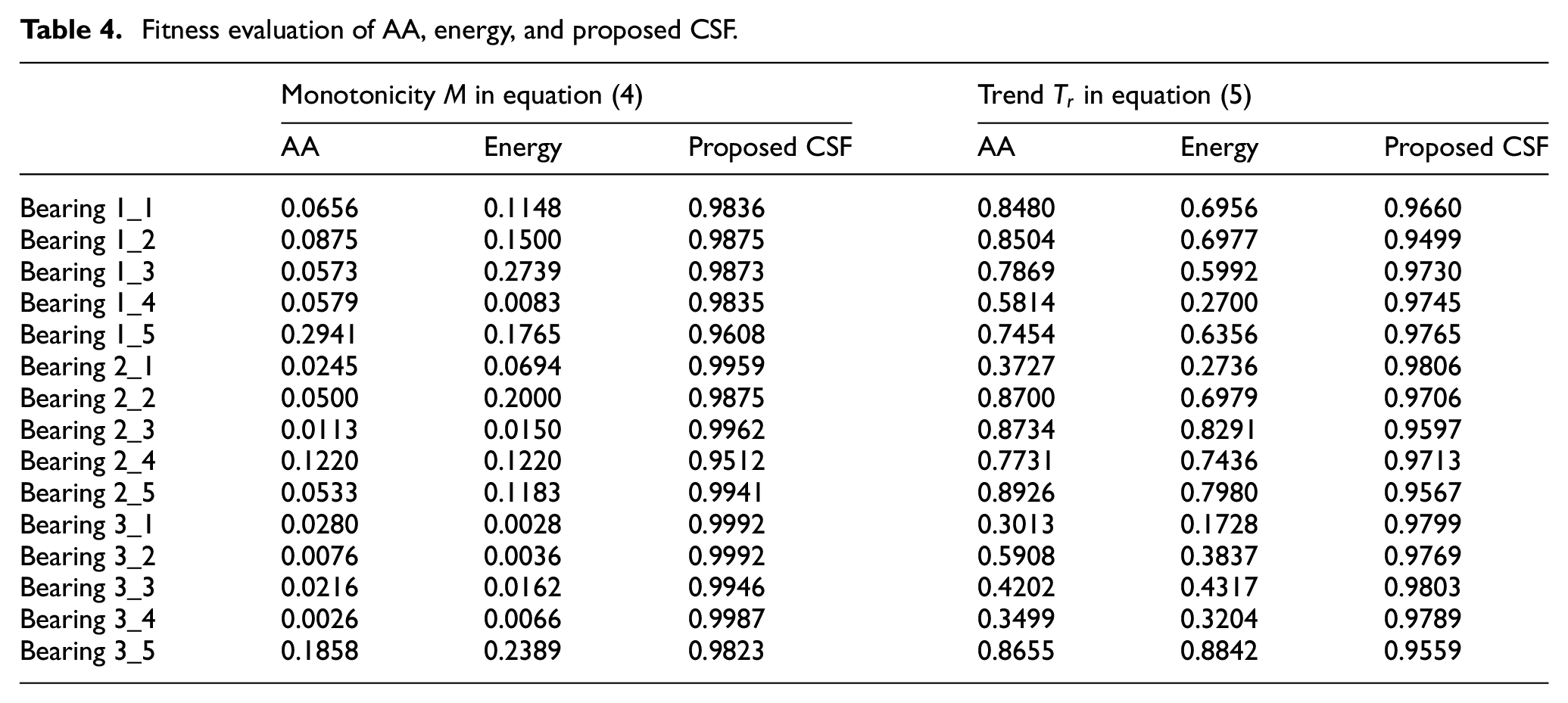
To evaluate the monotonicity and trend of degradation characteristics, this paper introduces two indicators: monotonicity and trending index. 38 The expressions of the two indicators are shown in equations (4) and (5).

where
where
Fitness evaluation of AA, energy, and proposed CSF.
3
criteria, curve fitting, and RUL estimation
During the normal operation of the bearings, the absolute value of the amplitude of its vibration acceleration obeys the Gaussian distribution. The details of the conclusion can be found in Li et al.,
30
Dewald and Curtin,
39
Song et al.
40
In other words, when the bearing is in normal operation, the probability that the amplitude value of its vibration acceleration is distributed in

where
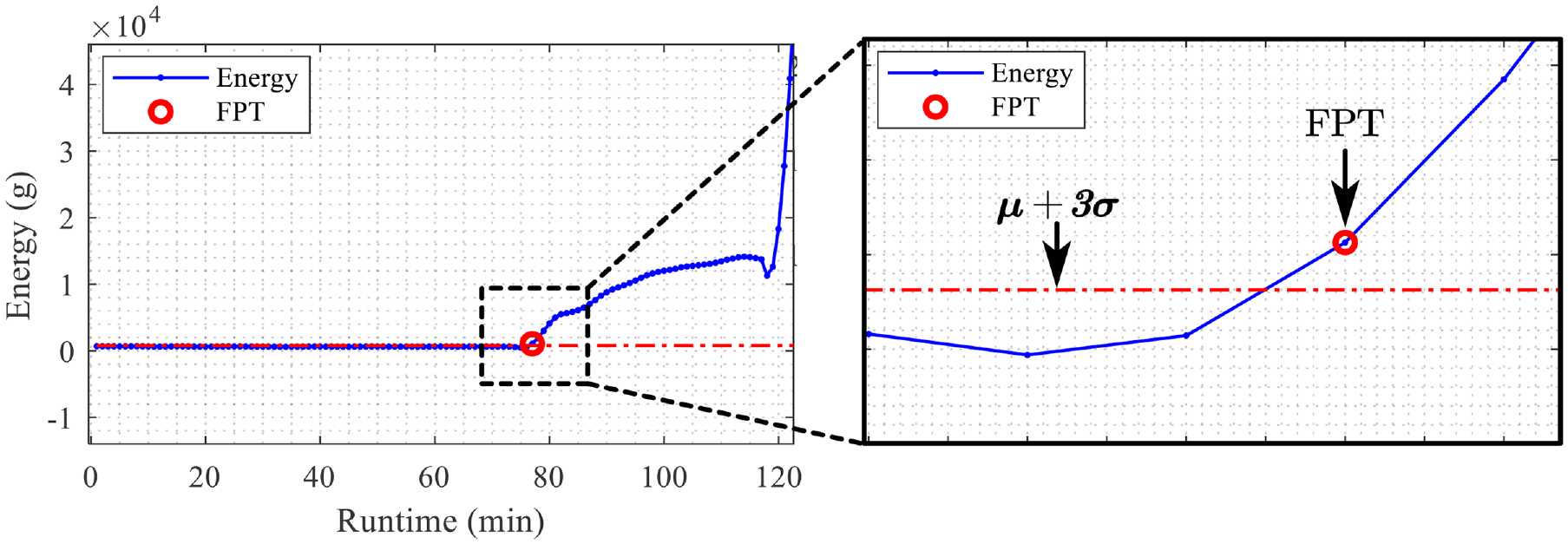
Energy and its FPT detection.
According to equation (7), this paper adopts a two-degree polynomial fitting model



where
Experimental results and discussion
FPT detection
The FPT test results of rotating components under three working conditions are shown in Figures 8 to 10. It is worth mentioning that the XJTU-SY bearing dataset does not specify the FPT points of the monitored components. The red circles in Figures 8 to 10 represent the detected FPT points, and the red dashed lines represent the fault boundary obtained using the 3
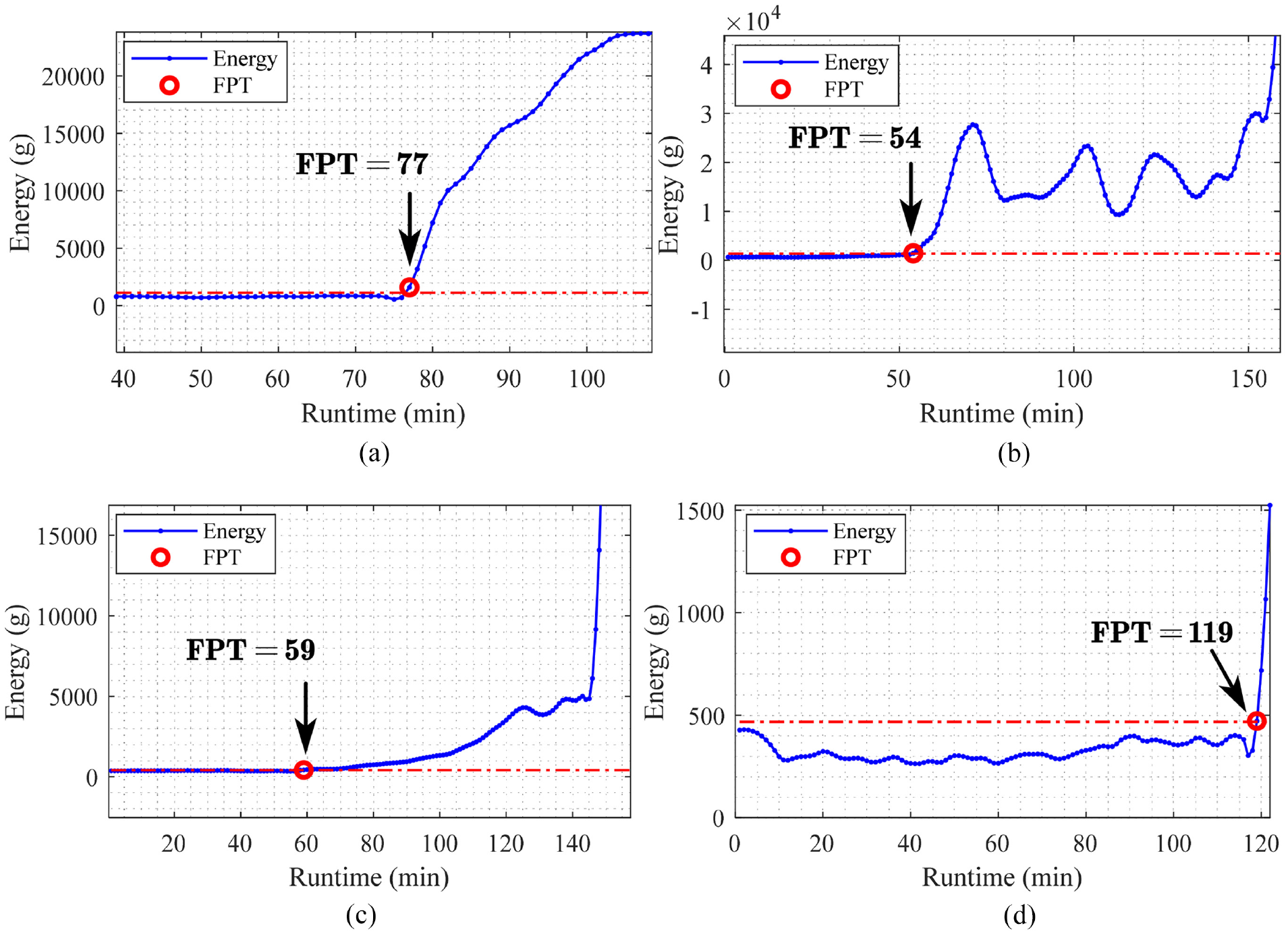
Condition I (35 Hz/12 kN): (a) Bearing 1_1, (b). Bearing 1_2, (c) Bearing 1_3, and (d) Bearing 1_4.
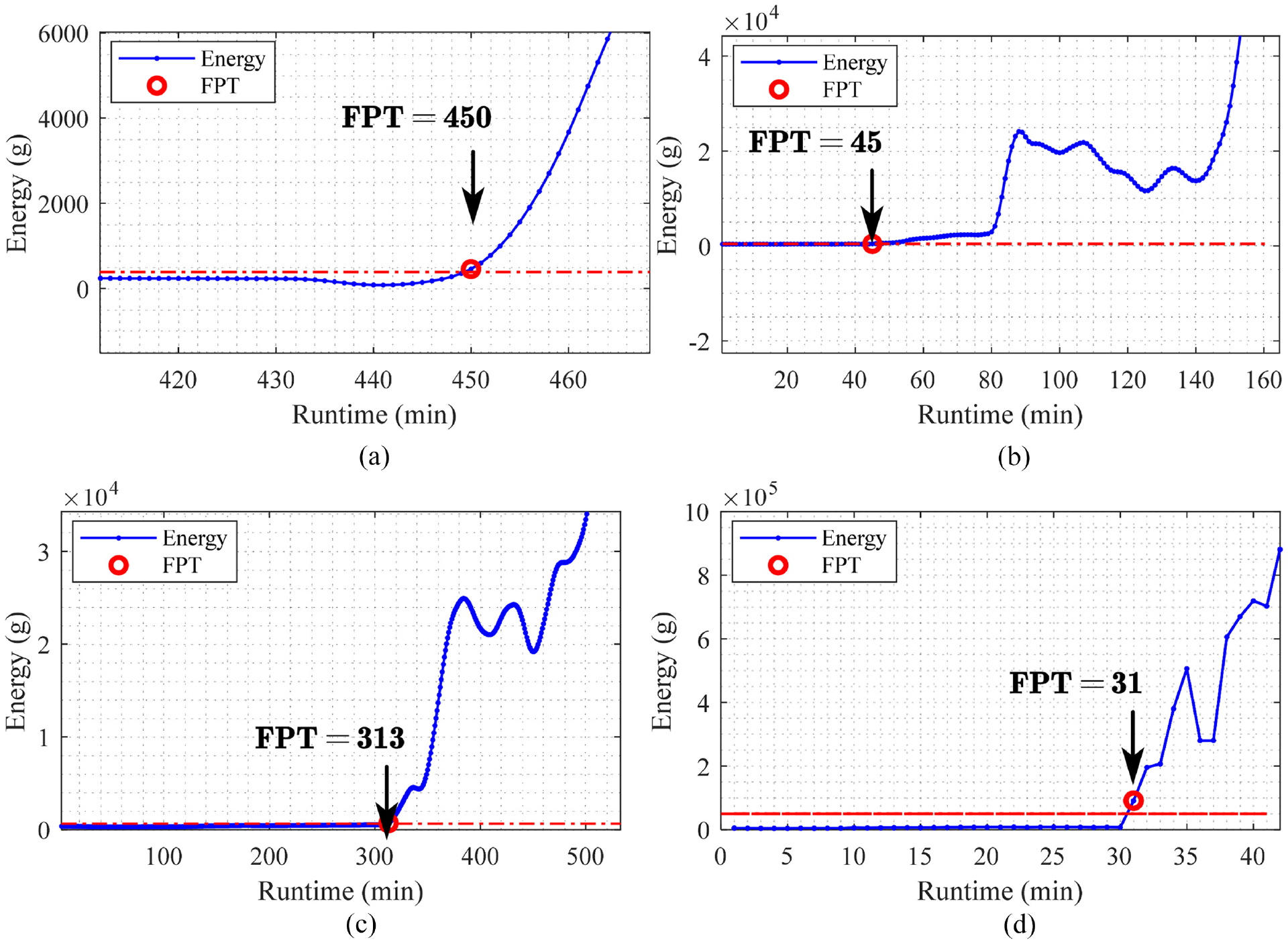
Condition II (37.5 Hz/11 kN): (a) Bearing 2_1, (b) Bearing 2_2, (c) Bearing 2_3, and (d) Bearing 2_4.
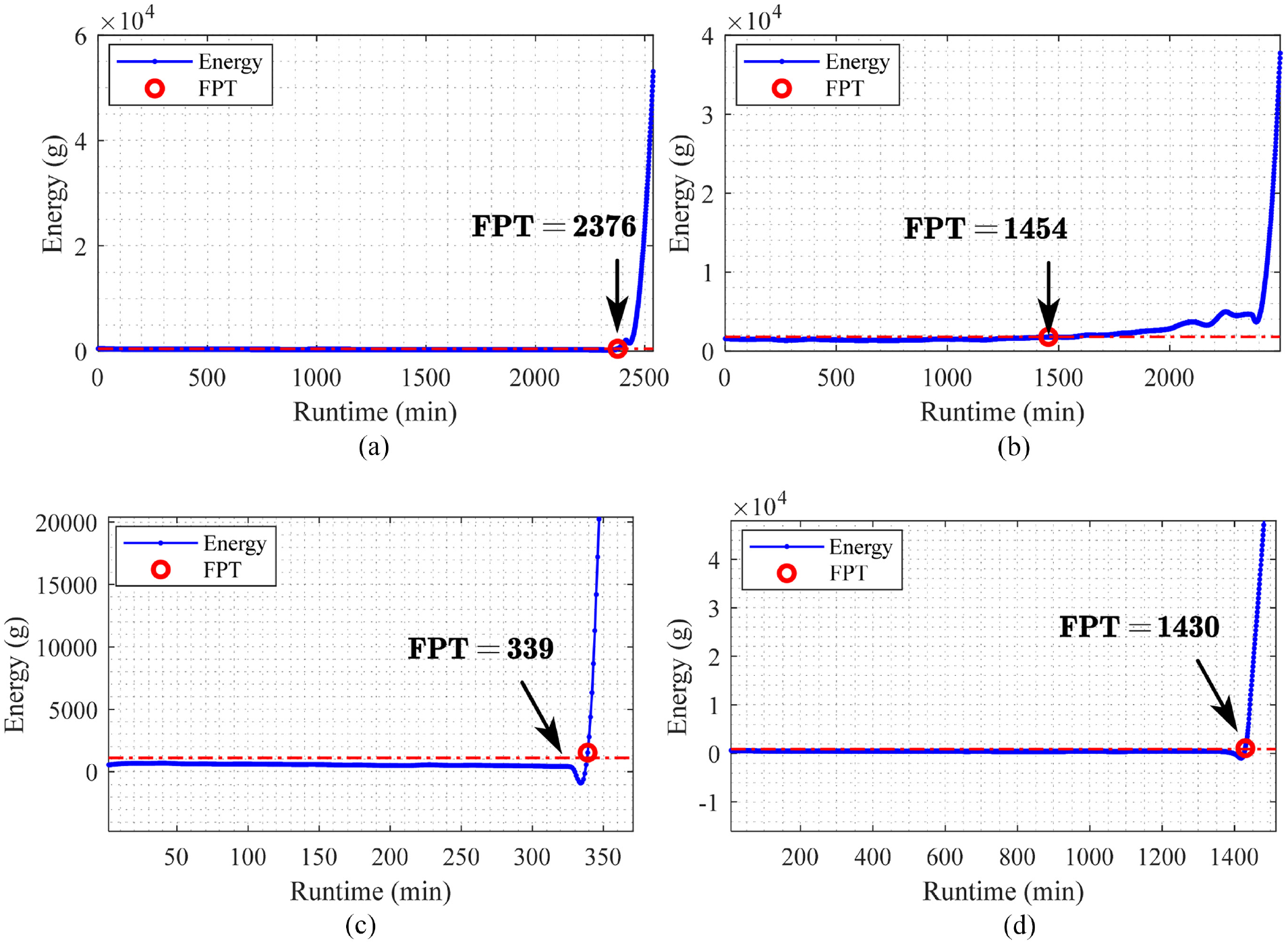
Condition III (40 Hz/10 kN): (a). Bearing 3_1, (b) Bearing 3_2, (c) Bearing 3-3, and (d) Bearing 3_4.
As shown in Figure 8, this study gives the FPT test results of the four sets of bearings in the condition I (35 Hz/12 kN) in the horizontal direction. The FPT corresponding to the four sets of bearings are 77, 54, 59, and 119 min, respectively. It can be seen that before the bearing failure, the energy value of the bearing has been in a relatively stable state. After FPT, the energy of vibration in the horizontal direction will increase rapidly. As shown in Figure 9, the FPT test results of the four sets of bearings in the condition II (37.5 Hz/11 kN) in the horizontal direction are 450, 45, and 313, and 31 min, respectively. As shown in Figure 10, the FPT test results of the four sets of bearings in the condition III (40 Hz/10 kN) in the horizontal direction are 2376, 1454, 339, and 1430 min, respectively. Compared with condition I and II, the overall test time of condition III is longer.
Intuitively, it can be seen from Figures 8 to 10 that after the FPT is detected, the energy value of the monitored signal will rise sharply, which means that the degree of fault is increasing. The next task identification performs RUL prediction on the failed components to achieve task II (as shown in Figure 4).
RUL Estimation and Comparison with Different Prediction Methods
In the RUL prediction stage, this study selected three sets of bearings for each operating condition. They are Bearings 1_1, 1_2, and 1_3 for working condition I, Bearings 2_2, 2_3, and 2_5 for condition II, and Bearings 3_1, 3_2, and 3_4 for the working condition III. The reason is that compared with the service cycle of the bearings, the actual RUL of the not selected bearings is small. That is, as shown in Figure 8(d), Figure 9(d), and Figure 10(a), (c) and (d), the detected FPT points are very closed to EoL. This study also uses horizontal vibration data for RUL prediction. According to the energy value of the bearing vibration, the time point of the first failure of the bearing is detected, and the CSFs and curve fitting methods proposed in this study are used to predict the RUL. As shown in Figures 11 to 13, the red curve is the predicted value of RUL, and the blue is the actual value. When a bearing failure was detected, the RUL prediction mechanism started. In the early stage of RUL prediction, there was a large deviation from the prediction. However, as the degree of bearing failure deteriorated, the RUL prediction gradually converged to the actual value.
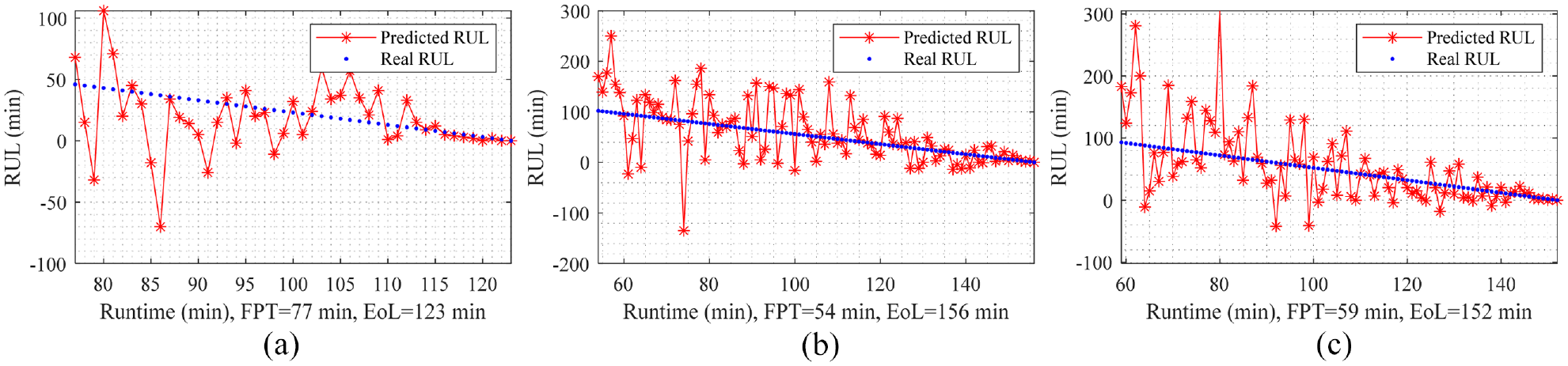
Condition I (35 Hz/12 kN): (a) Bearing 1_1, (b) Bearing 1_2, and (c) Bearing 1_3.
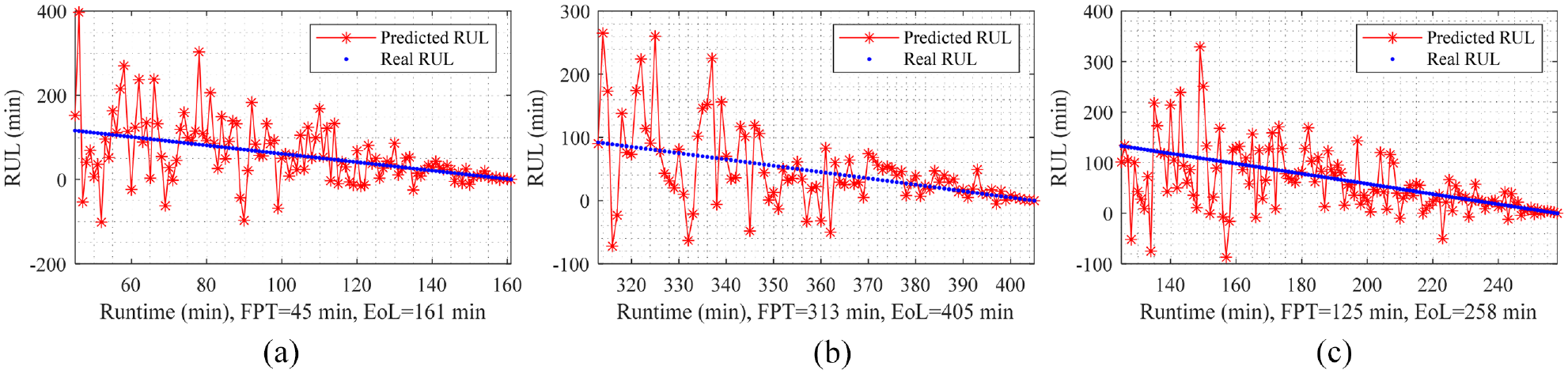
Condition II (37.5 Hz/11 kN): (a) Bearing 2_2, (b) Bearing 2_3, and (c) Bearing 2_5.
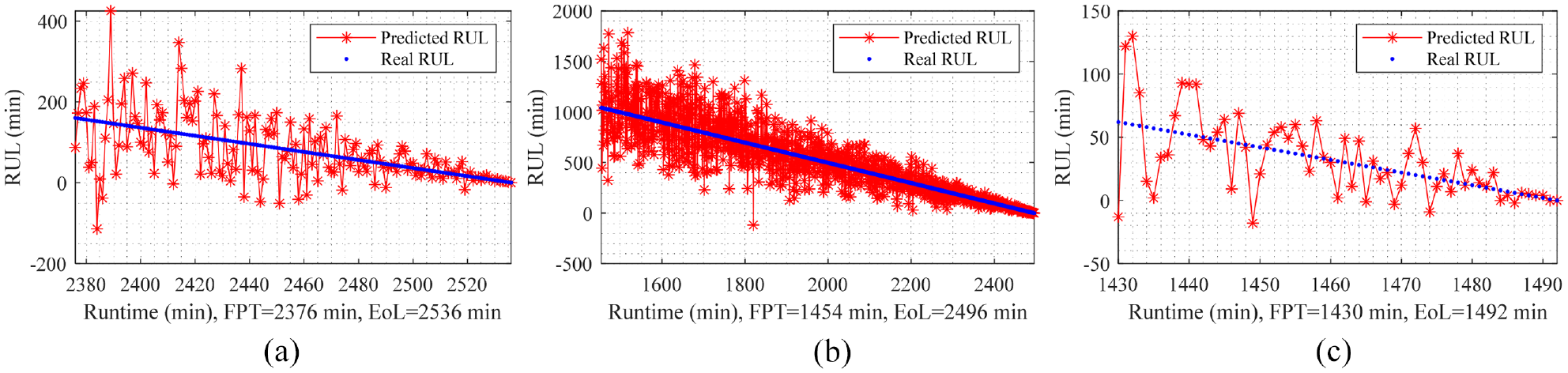
Condition III (40 Hz/10 kN): (a) Bearing 3_1, (b) Bearing 3_3, and (c) Bearing 3_4.
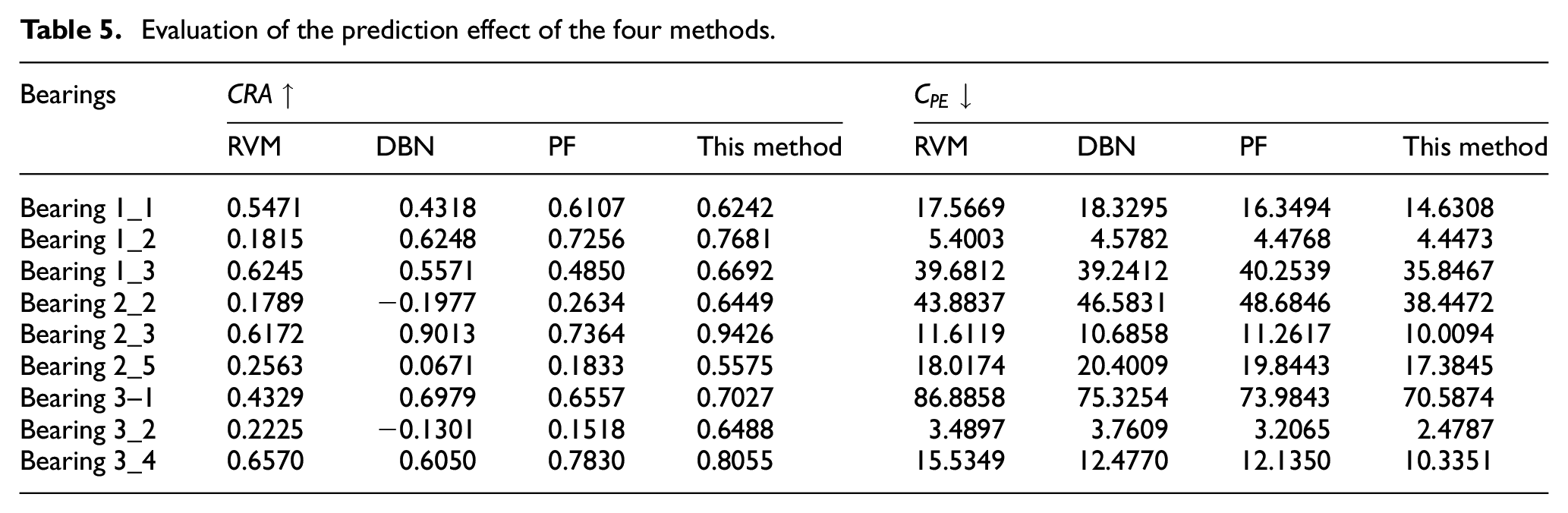
To evaluate the prediction performance of proposed method, this paper introduces three available prediction methods, such as relevance vector machine (RVM)-based approach in Zhang and Guo, 42 deep belief network (DBN) based method in Zhang et al., 43 and particle filtering (PF)-based method in Liao. 44 Due to space limitations, this paper does not give the parameter configuration of these corresponding methods, but directly gives the RUL prediction results corresponding to these methods. In addition, two widely used evaluation metrics, that is, cumulative relative accuracy (CRA) and convergence,33,45 are employed in this paper. CRA is able to comprehensively assess the accuracy of a prognostics approach by aggregating the relative prediction accuracies at all inspection time. Given RUL prediction results, CRA value 33 can be calculated by:

where

where
The RUL prediction performance of the four methods for the nine groups of bearings is shown in Table 5. Among them, the symbol ↑ means the bigger the better, and ↓ means the smaller the better. It can be seen that the RUL prediction method based on CSFs proposed in this paper has the highest prediction accuracy and the fastest convergence.
Evaluation of the prediction effect of the four methods.
Discussion
The necessity of CSF
During the operation of rotating machinery, vibration acceleration signals are usually used as the monitored signals. These signals can be converted into corresponding features for use by the back-end predictive machine. However, these monitored features often perform poorly in terms of linearity, trend, and monotonicity, which puts forward higher requirements on the design of the predictor. In addition, affected by the operating conditions, the traditional time-frequency characteristics are difficult to linearize, and it is difficult to maintain good predictability in the trend, which brings uncertainty to the RUL prediction, thus reducing the prediction accuracy. The main purpose of this paper is to use the idea of online computing to propose an equivalent status indicator to improve the monotonicity, trend, and linearity of the extracted status features, thereby simplifying the RUL prediction mechanism and reducing the computational complexity under high-dimensional learning. Evaluating the status of monitoring components with equivalent indicators from a new perspective provides convenience for RUL prediction.
Online prediction and its application significance
As shown in Figure 4, this paper proposes a new RUL online prediction architecture. The proposed method adopts a similar first-in-first-out (FIFO) method, and continuously updates model parameters through online data update, which realizes bearing failure judgment (i.e., FPT detection) and RUL prediction without prior data. Through RUL prediction performance (as shown in Figures 11 to 13), when more and more data are available, the proposed prediction architecture has a rapid convergence.
Limitation of this study and future work
This research does not focus on how to design a high efficient predictor, but only used a linear fitting method with a simple structure, that is, a short time series was used to fit a predetermined curve, and then the mathematical equation represented by this curve is used to fit the upcoming CSFs. And then compares the predicted value with the actual failure threshold to get the RUL. Objectively speaking, this method has a simple structure and acceptable computational efficiency, but it does not give the confidence interval of RUL and the probability of failure. In the future work, the combination of Monte Maro sampling method and the prediction machine of the deep networks are worth continuing to explore. In addition, the database used in this work only studies the feature acquisition of vibration acceleration as state features with constant rotating speed, and does not involve the RUL prediction problem under variable speed and torque conditions. The latter is also worth continuing to explore. In short, improving the RUL prediction efficiency of rotating machinery is always the core task of the PHM field.
Conclusion
The noise interference of state characteristics, the excessive dependence of supervised learning on prior samples, and the practical RUL online calculation, these problems restrict the industrial application of RUL prediction for rotating machinery equipment. To overcome the above problems, this paper firstly introduces the DWT method to reduce the noise of vibration acceleration signal obtained, and then uses the sliding average method to weaken the transient excitation. To make the state characteristics of the monitored bearing trendy, linear, and monotonic, this paper introduces a new set of state interpret indicators: energy and CSF to reflect the health status of the bearing. Based on the health status information of the bearings, the fault boundary threshold is established through the
Footnotes
Appendix
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was funded in part by the Science Foundation of Henan University of Technology (Grant no. 2019BS004), in part by the Cultivation Programme for Young Backbone Teachers in Henan University of Technology (Grant no. 21420171), in part by the Natural Science Project of Henan Province (Grant nos. 20A470003 and 202102210301).