The finite-time dissipative filtering problem for a kind of discrete-time stochastic interval system with time-varying delays whose parameters are taken in a convex hull is investigated in this paper. Taking a representative subsystem from a stochastic convex hull system, based on convex analysis and matrix theory, a new interval matrix method is proposed to study the finite-time dissipative filter problem, which can deduct the conservativeness. Then, the finite-time dissipative filter is designed by employing a complex Lyapunov-Krasovskii functional together with the improved Wirtinger inequality technique. Correspondingly, some novel sufficient conditions are obtained to ensure the filtering error system with time-varying delays robustly stochastically finite-time bounded and the dissipative index is satisfied. Next, the desired filter gains are achieved in terms of linear matrix inequalities. Finally, the effectiveness of the designed filter is demonstrated by a numerical example with simulations.
Strictly speaking, time delays are ubiquitous in control systems.1,2 As an effective method to characterize systems, time delays have catched many researchers’ attention. The research on system with time delays originated in the 1950s, there have existed lots of research results up to now.3–5 Furthermore, discrete-time systems, especially discrete-time systems with time-varying delays, are expanded rapidly.6–8 In recent years, some novel skills for the stability analysis of discrete-time systems with time-varying delays have been raised. For example, Zhang et al.9 have proposed the free-weighting-matrix method. A novel stability condition for discrete-time systems with interval time-varying delays was investigated by employing improved Wirtinger inequality method.10
The concept of dissipative was first proposed by Willemns.11 When the supply is greater than the storage for a system, the system is called dissipative system. Dissipative systems are thought to be open systems far from thermodynamic equilibrium state, which explain many previously unexplained phenomena in nature. For linear and nonlinear systems, dissipative theory plays a unique role in the aspect of designing feedback controllers. It is not only a powerful tool for researching economic systems and complex systems but also extensively used in solving the robust control problems of various systems.12–14
Finite-time stability was first proposed,15 since then lots of researchers begun to study the finite-time control. In 2012, a novel global finite-time stability feedback controller was proposed.16 By combining the adaptive fuzzy control method with backstepping technique, an adaptive fuzzy finite-time backstepping control method was given.17 As a matter of fact, the system reaches a dissipative state in a finite-time interval is more practical. The finite-time dissipative problem has faster convergence speed and better robustness. Thus, the finite-time dissipative problem has become increasingly valuable.18–21
In practical engineering problems, we have to optimize the estimation of stochastic variables based on the observation process, which is called as the filtering problem. In the past few decades, Wiener filter, Kalman filter, and other filtering methods have been proposed. It is worth noting that Kalman filter is a crucial research object. On one hand, it is always one of the most commonly used ways for state estimation because of its small computation and recursive real-time processing. On the other hand, it can be used in radio, computers, almost all videos or communication equipment and even in many engineering applications like radars and computer vision.22–24 Considering this, many results have been investigated.25–28 For example, the time-varying reliable filter design problem for semi-Markov jump systems over a lossy network was studied.25 The problem of event-triggered filtering for a class of nonlinear cyber-physical systems with deception attacks was considered.26
As we known, there always exist uncertainties due to errors in systems modeling and changes in operating conditions. One way of describing uncertainty of the system is parameter uncertainty, so the system with interval parameter and stochastic interval parameter has attracted great attention of researchers.29–31 For example, the finite-time stabilization problem of memristor-based inertial neural networks with time-varying delays via interval matrix method has been studied.29
Inspired by the above analysis, this paper is mainly devoted to research the finite-time dissipative filtering problem for a kind of discrete-time stochastic interval system, which is different from the existing literature.32,12 The main contributions of this paper are highlighted as follows. First, interval parameters are embedded into the discrete-time stochastic interval system, and the time-varying delays are taken into account in exploring its finite-time dissipative filtering problem. Second, improved Wirtinger inequality is further proposed as a novel summation inequality to reduce the conservatism of finite-time dissipative filtering. Third, there is few results on finite-time dissipative filter design for discrete-time systems by the interval matrix method.
The remainder of this paper is organized as follows. In section 2, the discrete-time stochastic convex hull system with time-varying delays is proposed and transformed to the discrete-time stochastic interval system with time-varying delays. Then, a linear filter is constructed to obtain the filter error stochastic system. Next, the relevant assumptions, definitions, and lemmas are given. Section 3 is the main section, which mainly analyzes the problem of finite-time dissipative filtering, and gives some novel sufficient conditions. Finally, the validity of the above method and the accuracy of the conclusion are illustrated by numerical simulation. A summary is provided in the last section.
Notations: stands for -dimensional Euclidean space; I and denotes the identity matrix and zero matrix with appropriate dimensions; * denotes the symmetric elements of symmetric matrix; means that is a positive definite and symmetric matrix; denotes the inverse of matrix ; stands for mathematical expectation.
Problem formulation and preliminaries
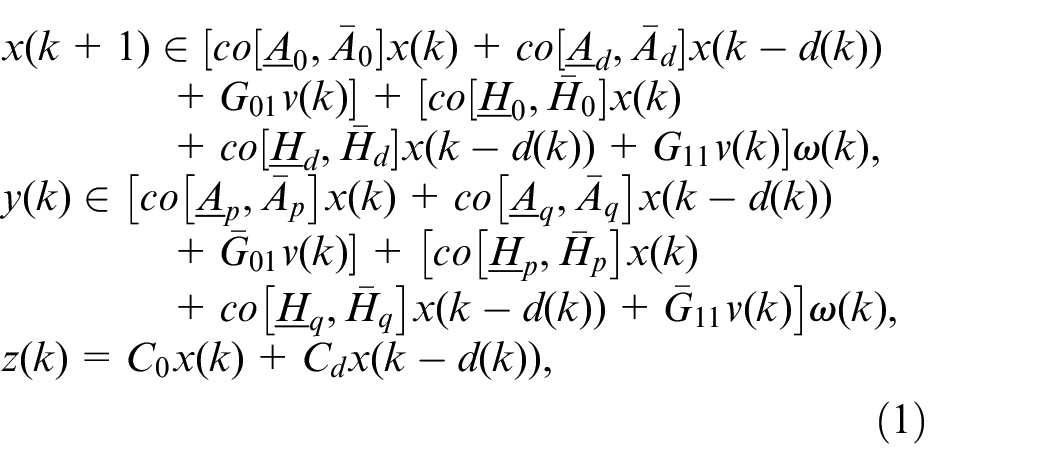
Consider the following discrete-time stochastic convex hull system:
where , , and are the state vector, measured output, and control output respectively; is the disturbance input, which belongs to , where denotes the space of nonanticipatory square-summable stochastic process with respect to . is a scalar Brownian motion on a complete probability space with is the time-varying delay satisfying where and are given nonzero constants. And , , and are given matrix with appropriate dimensions.
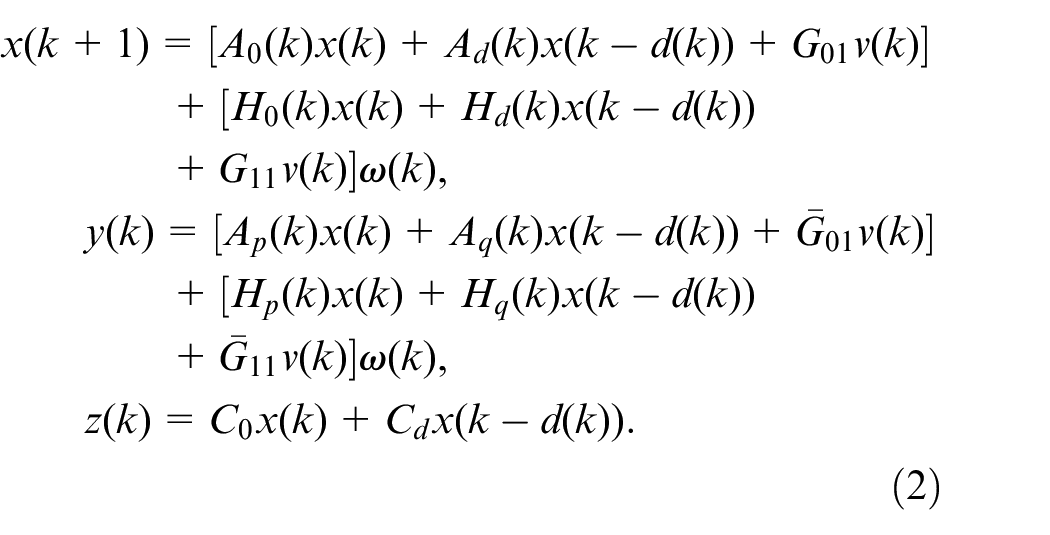
Let , where the matrix and are assumed to be known. By applying the theories of literature,33 there exist , in stochastic convex hull system (1), such that
Obviously, we have , ,
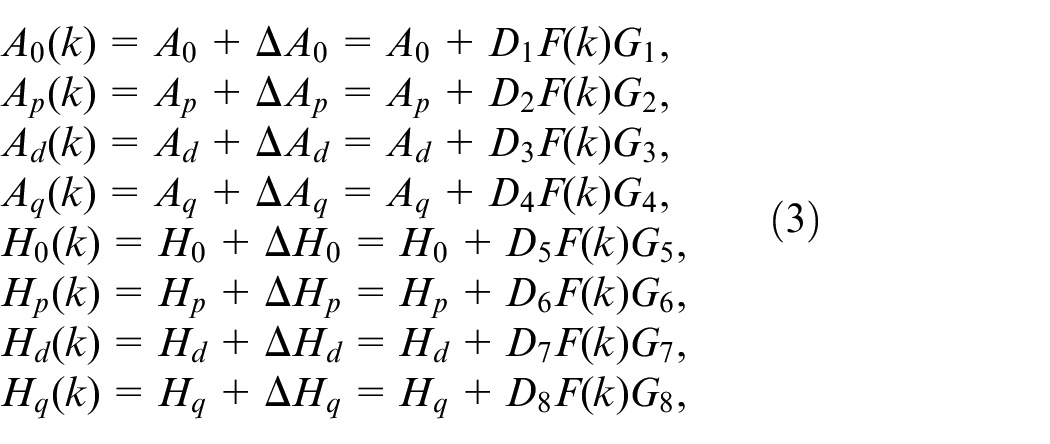
Similar to the existing literature,34 by employing interval matrix method, one follows that
where is an unknown time-varying matrix with .
Remark 1.Noted that the interval matrix method not only overcomes the influence of countless subsystems switching casually in the system (1), but also greatly reduces computational complexity and conservativeness, which makes the results different from the existing ones.35–39
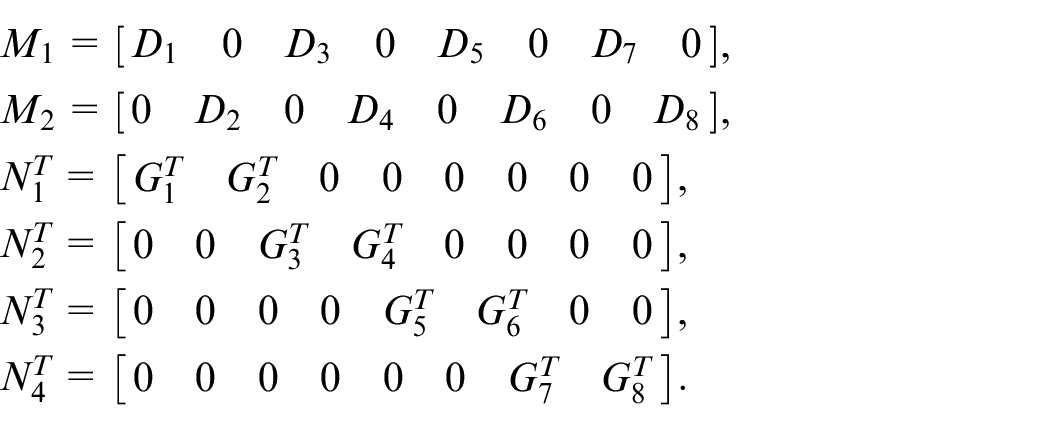
Denote
Obviously, the uncertain parameters (3) can be rewritten as
Furthermore, we design the linear filter for (2) as follow:
where are the estimates of and , respectively; , and are the filter gain matrix to be calculated.
Denote and the output error . The filter error system can be described as:
where , , , , , , , , , . Meanwhile, the admissible conditions with the uncertainties are formulated as:
where , , , , .
Assumption 1.The disturbance input vector v(k) is assumed to be time-varying and satisfies the following constraint
where is a given constant.
Definition 1.40Given positive constants with , and a symmetric matrix , the filter error system (5) is defined to be robustly stochastically finite-time bounded with respect to , if satisfies Assumption 1, it holds that ⇒, .
Definition 2.35The filter error system (5) is robustly stochastically finite-time dissipative with respect to , for given a constant , matrix , and , such that
(i) the filter error system (5) is robustly stochastically finite-time bounded with respect to ;
(ii) under the zero initial state, the following condition holds
Lemma 1.10For a symmetric matrix and a variable , where , the following inequality holds
where , , .
Remark 2.In this paper, the inequality in Lemma 1 is called the improved Wirtinger inequality. We know that the Wirtinger inequality is applied to the stability analysis of continuous-time systems. However, the improved Wirtinger inequality, which combines with the efficient representation of the improved reciprocal convex combination inequality, devotes to the stability analysis of discrete-time systems.10
Lemma 2.41(Schur complement). Given three matrix , where and , then if and only if or .
Lemma 3.42Define that , are real matrix and is a matrix function satisfying . There exists , it holds that:
Main results
In this section, based on the complex Lyapunov-Krasovskii functional, improved Wirtinger inequality, some complicated mathematical skills, and linear matrix inequality technique, some novel sufficient conditions are presented to guarantee the robustly stochastically finite-time dissipative for the filter error system (5).
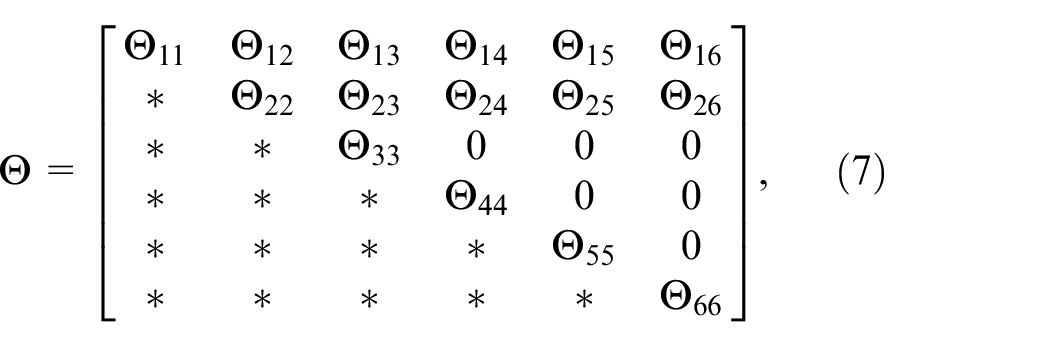
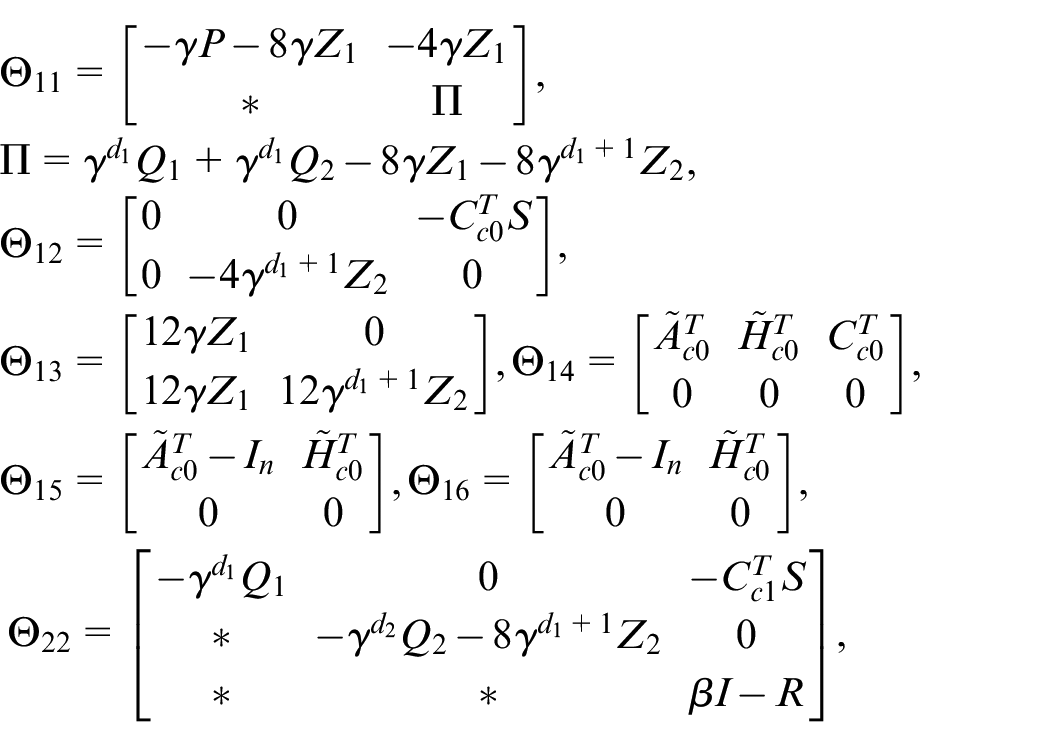
Theorem 1.For some given positive constants , , , , , , , , and a symmetric matrix , the filter error system (5) is robustly stochastically finite-time dissipative with respect to , if there exist symmetric definite matrix , , and constants such that
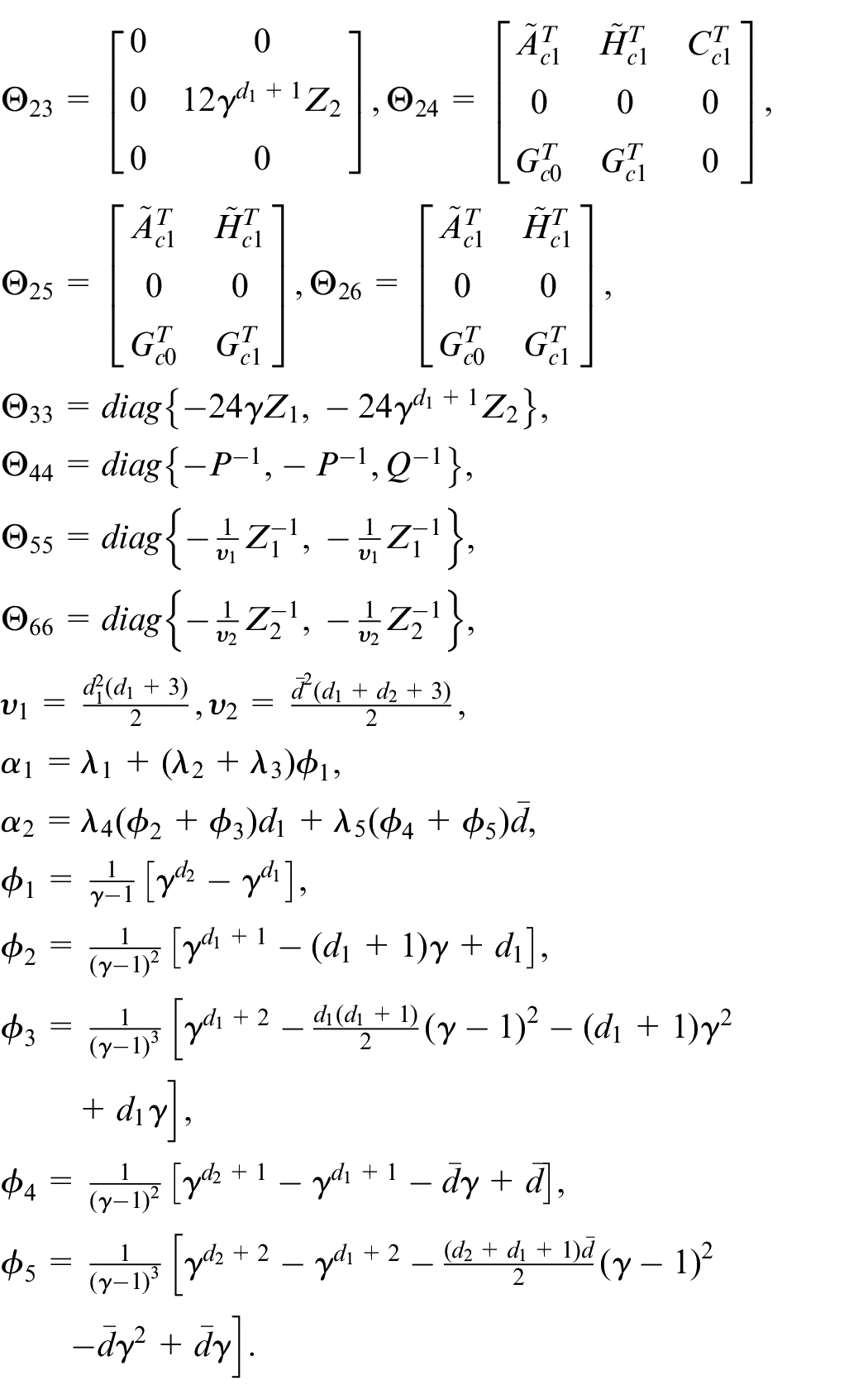
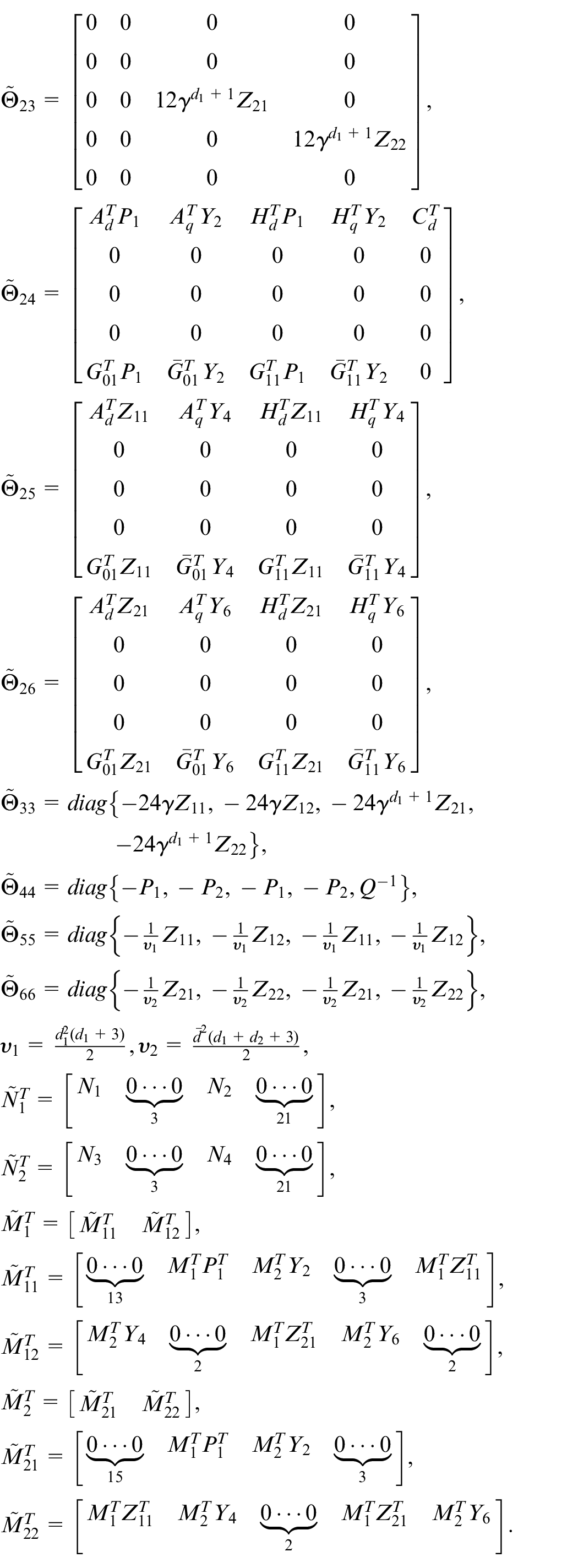
where
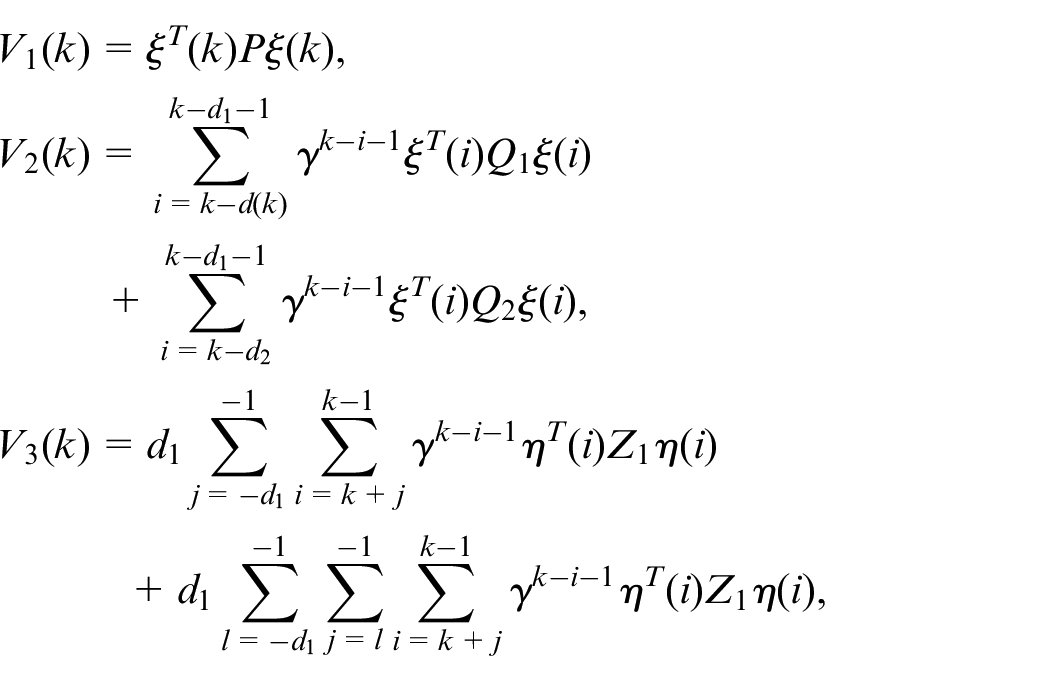
Proof. Construct a Lyapunov functional as follows
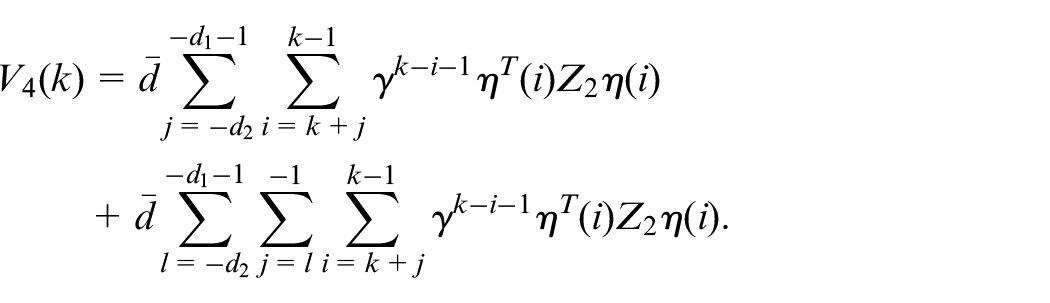
where
where , , and
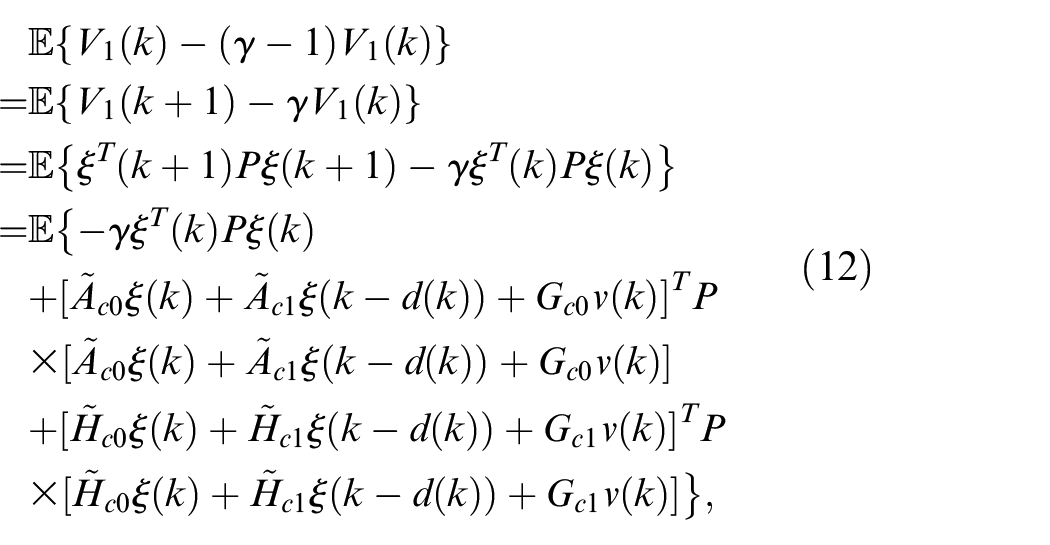
Calculating the forward difference by taking along the solution of the filter error system (5) and taking the mathematical expectation, it yields that
with
By Lemma 1, we have
where
and
From (14) and (15), it follows that
Similarly, we get
where
Substituting (12), (13), (16), and (17) into (11) yields
where is the known coefficient to prove that the system is finite-time bounded and
By applying Schur complement formula, (18) can be transformed into a linear matrix inequality, which is implied in (7). Thus, if (7) holds and , we have
Set , we have Then, we can obtain the inequality from Assumption 1 as follows
Assume that and if (10) holds, the mathematical expectation of is obtained as
Under conditions (8) and (9), combining (20) and (21) together, it can be concluded that
Therefore, from Definition 1, we conclude that the filter error system (5) is robustly stochastically finite-time bounded. Next, sufficient conditions of the robustly stochastically finite-time dissipative for the filter error system (5) are given.
Firstly, take into account the performance index as
By using the steps of (18), we derive
where
From Schur complement technique, the linear matrix inequality (7) are obtained from (23). Therefore, if (7) holds, it further yields . It is clear that .
Consider the constant , it follows that
What’s more, , we have
which implies
Therefore, by Definition 2, it shows that the filter error system (5) is robustly stochastically finite-time dissipative. The proof is completed.
Remark 3.As we all know, the stability of the system can be easily determined by choosing a reasonable Lyapunov functional in the stability analysis of the system. In this paper, the Lyapunov functional (11) containing triple summation terms is considered. It is evident that the considered Lyapunov functional increases the computational complexity. Meanwhile, the improved Wirtinger inequality in Lemma 1 is applied in calculating the forward difference and inequality scaling in Theorem 1. In fact, the considered Lyapunov functional in this paper can take fully the advantage of the improved Wirtinger inequality and reduces the conservatism caused by the optimal setting of linear matrix inequality with increasing the upper bound of time delays in control theory together with the improved Wirtinger inequality in the filter design, as discussed inZhang et al.,4Chen and Sun.43
Now, the design of the finite-time dissipative filter gain is presented in the following theorem.
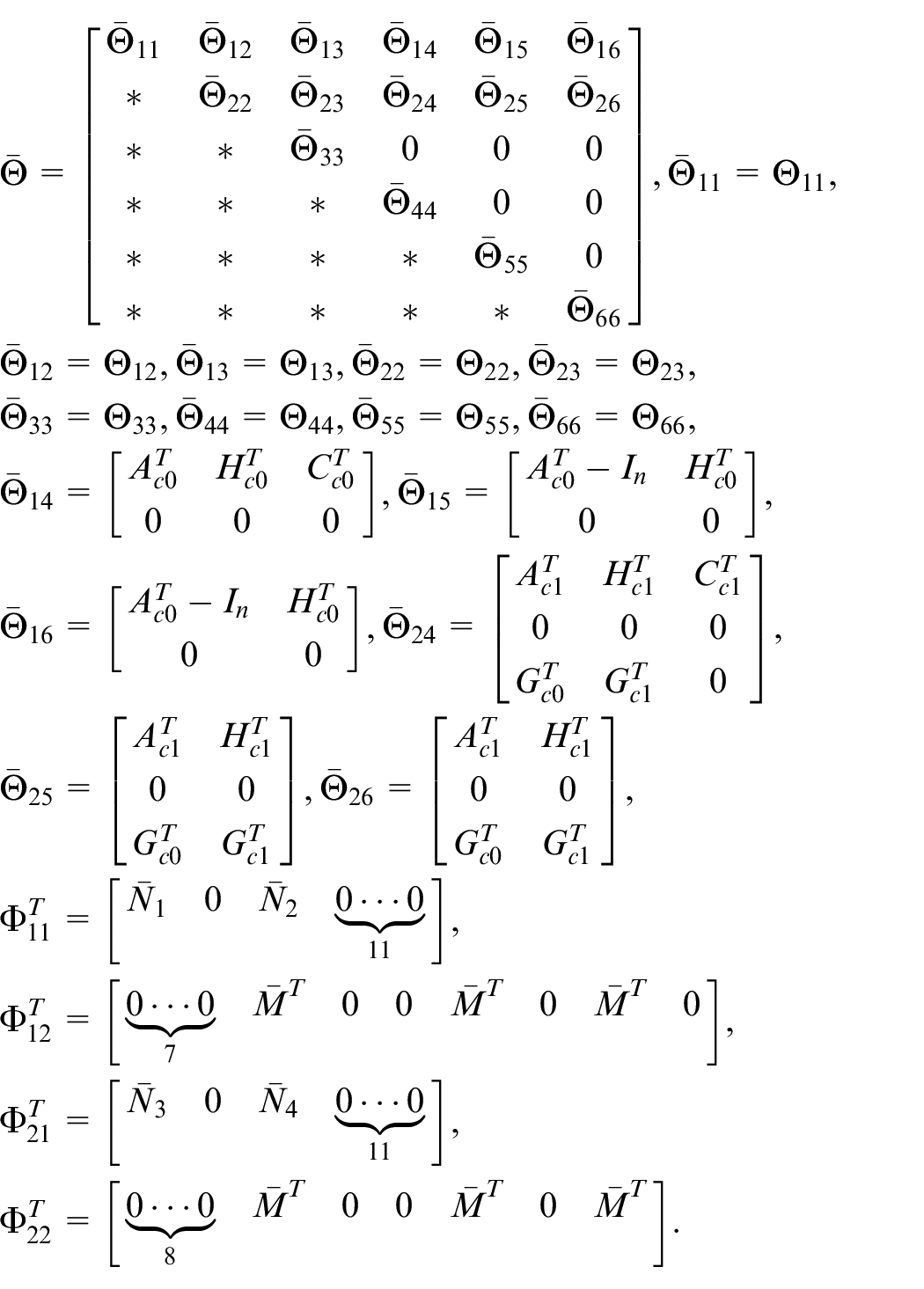
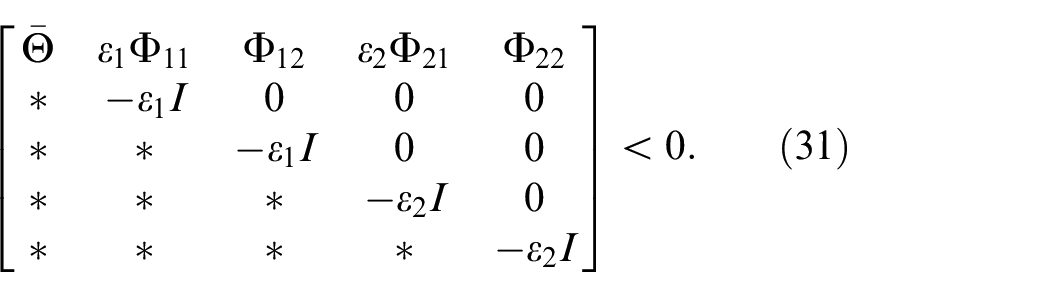
Theorem 2.For some given positive constants , , , , , , , , and a symmetric matrix the filter error system (5) is robustly stochastically finite-time dissipative with respect to , if there exist , , , any appropriate dimensioned matrix , positive constants and such that the following linear matrix inequalities and (8)–(10) in Theorem 1 hold:
where
Furthermore, the desired filter gain can be given by
Proof. From (7), it can derive that
where
By virtue of Lemma 3, we know that there exist , such that (29) can be rewritten as
By implementing Schur complement lemma, it follows that
Denote and , Then, left-multiply and right-multiply on (31), the inequality (31) can be converted into (27). The proof is completed.
Numerical simulation
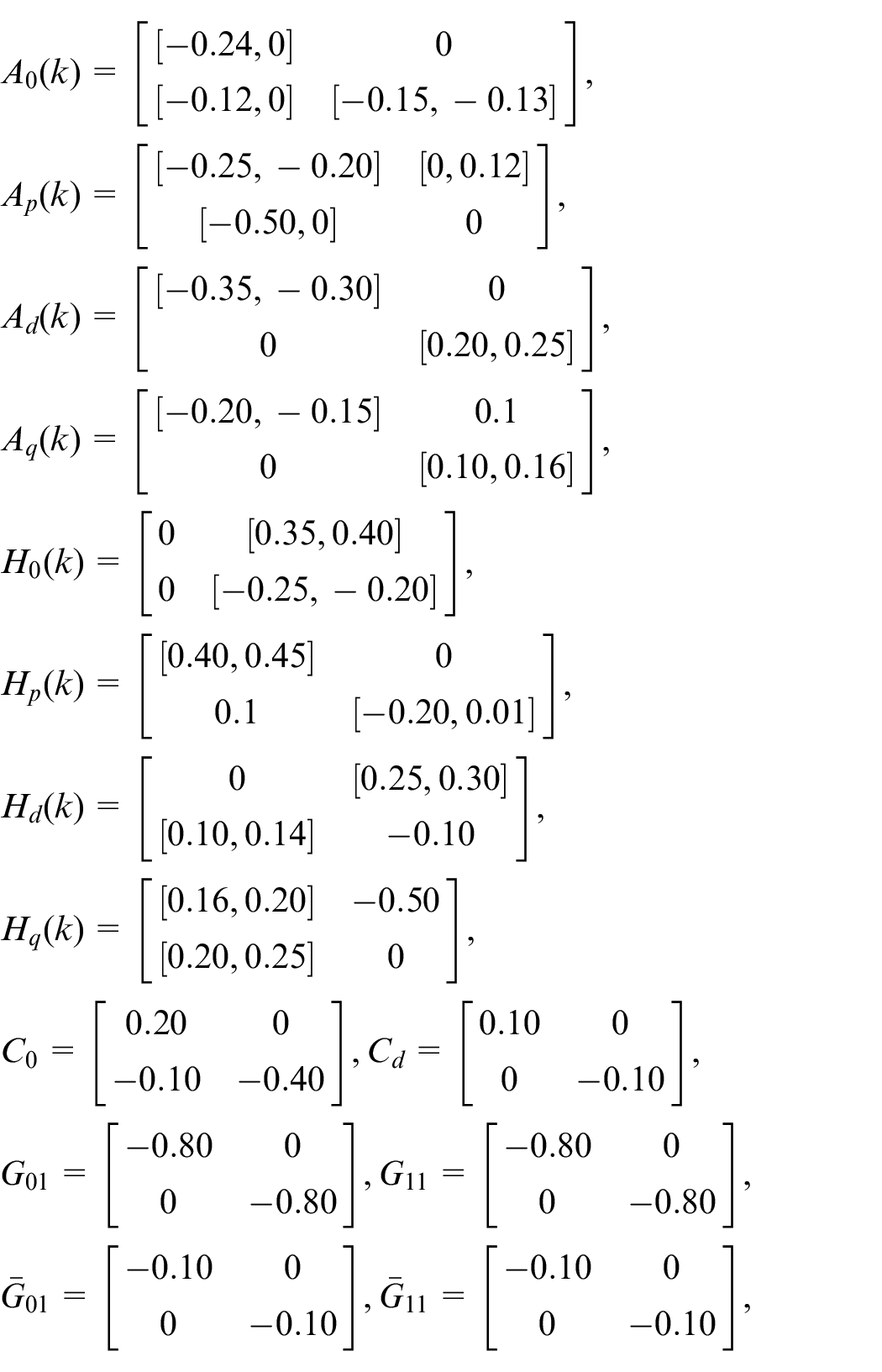
A numerical example with simulation results is provided in this section to ensure the effectiveness of the designed filter. Consider the systems (2) with
The related parameters are taken as , , , , , , , , , , , and the finite-time dissipative index . By exploiting the LMI toolbox of MATLAB, the linear matrix inequalities (8)–(10) in Theorem 1 and (27) in Theorem 2 are solved, the filter gain matrix are calculated as follows:
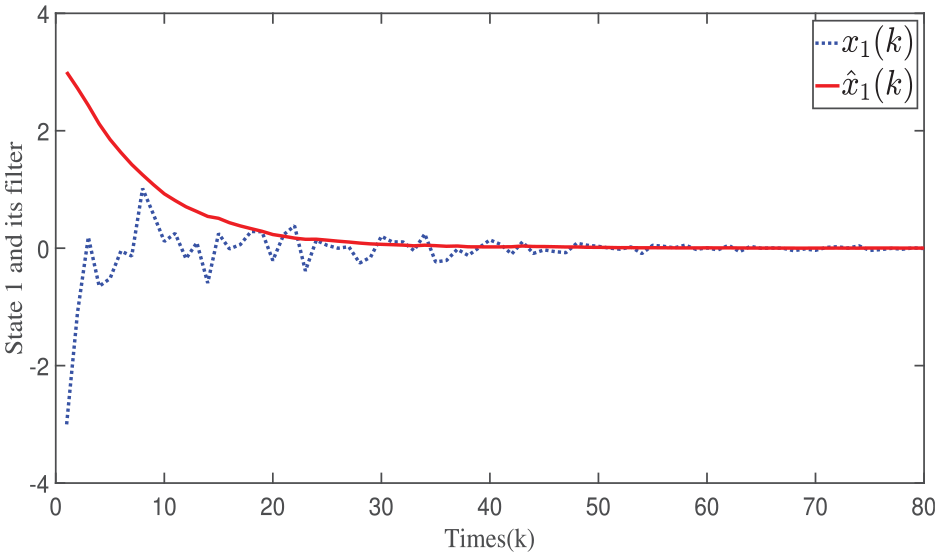
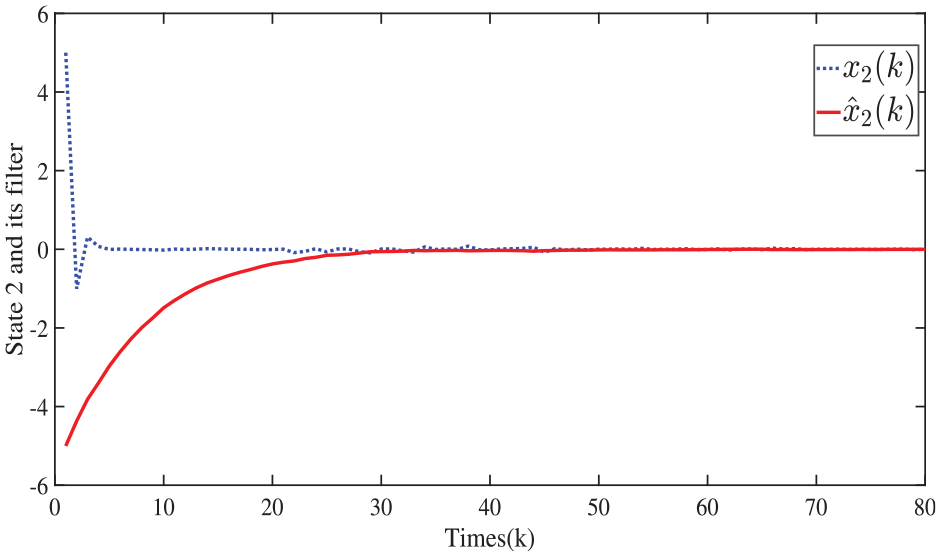
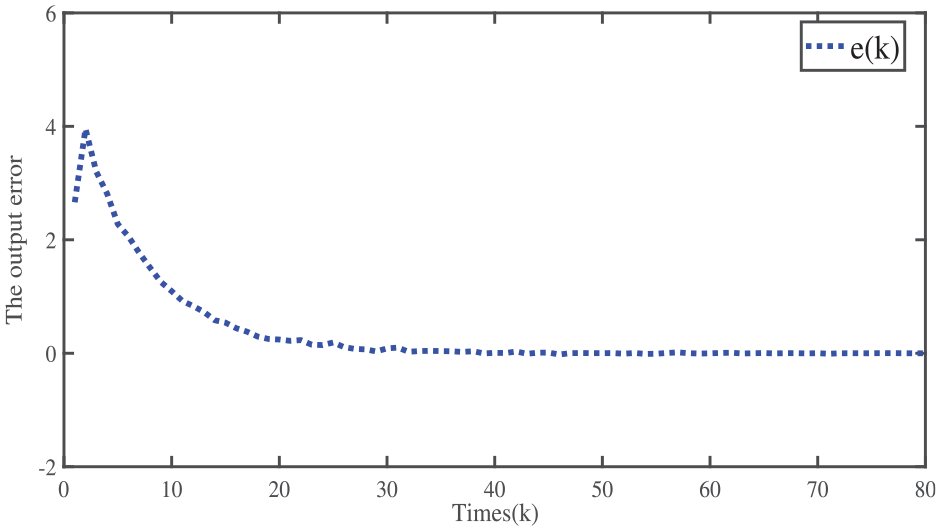
To illustrate the effectiveness of the designed filter, the simulation is carried out. Furthermore, the simulation results are presented in Figures 1 to 6, in which Figures 1 and 2 are the state trajectories and their filters with different initial conditions. The tracking error state estimate of is shown in Figure 3. It is evident that the error state estimate trends to , that is to say, the designed filter is observed to be effective.
Trajectories of and its filter with .
Trajectories of and its filter with .
The tracking error e(k) with .
Trajectories of and .
Trajectories of .
Trajectory of .
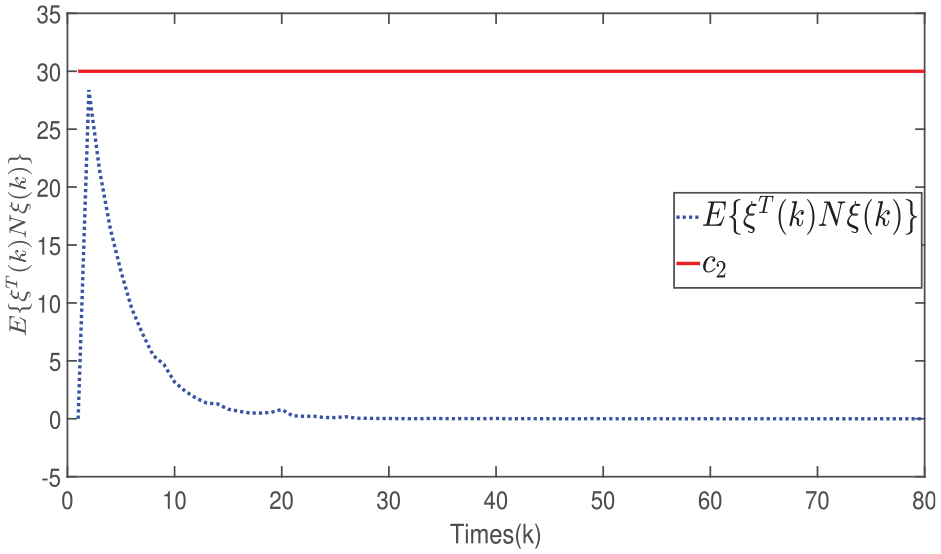
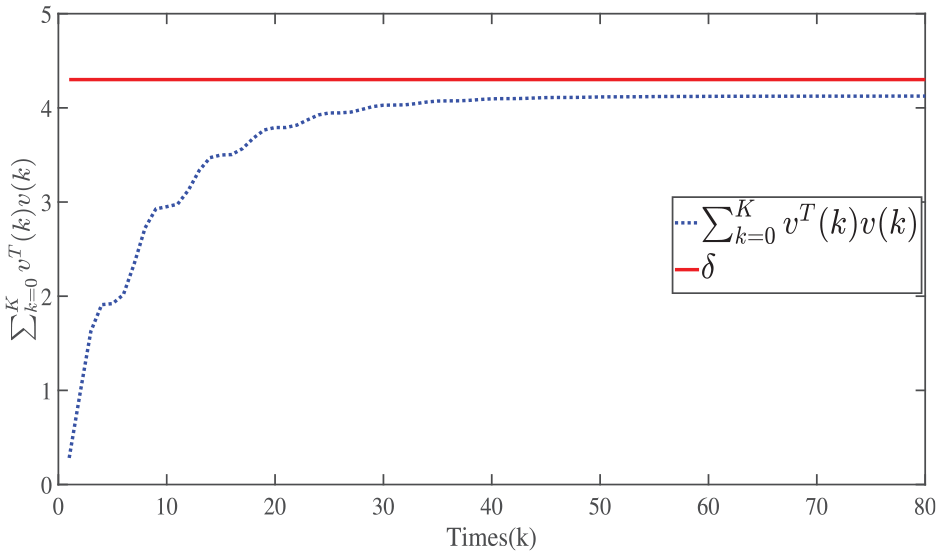
Figure 4 gives the trajectory of . In Figure 4, when , it means in finite-time, the trajectory of is not beyond the provided upper bound , which illustrates the the filter error system (5) is robustly stochastically finite-time bounded and dissipative. The exogenous disturbance input is chosen as , it is clearly that , which is verified in Figure 5.
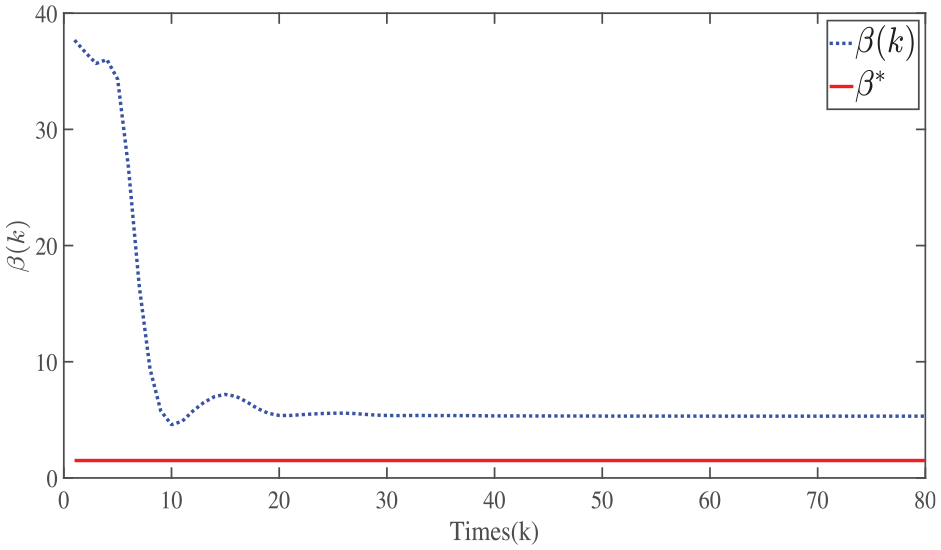
To validate the dissipative performance in the proposed finite-time interval, the discrete-time dissipative performance index can be defined as
From Figure 6, we can conclude that is always higher than , which implies (6) holds. It can be seen from the simulation results that the designed filter can effectively satisfy desired tracking performance.
Conclusion
The finite-time dissipative filtering problem for a kind of discrete-time stochastic interval system with time-varying delays whose parameters are taken in a convex hull has been addressed in this paper. With the help of the complex Lyapunov functional and improved Wirtinger inequality technique, the finite-time dissipative filter has also been given. Some new sufficient conditions are obtained to ensure the filter error system (5) robustly stochastically finite-time bounded and dissipative. Finally, a numerical example with simulations has demonstrated the effectiveness of the desired filter.
In the future, it is well worth to further investigate the event-triggered finite-time dissipative filtering problem for a class of Markov switching systems via interval matrix methods. We are also interested in exploring the fault detection filter design problem and the finite-time filtering problem for networked control systems via interval matrix method. Furthermore, the integration of our research with practical applications could be considered.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation of China with Grant No: 61473213, 61671338, and Hubei Province Key Laboratory of Systems Science in Metallurgical Process (Wuhan University of Science and Technology) with Grant No: Z201901.
ORCID iD
Guici Chen
References
1.
LiuQLiuYPanX.Global stability of a stochastic predatorcprey system with infinite delays. Appl Math Comput2014; 235: 1–7.
2.
MengLBaiC.Global asymptotic stability of a stochastic delayed predatorcprey model with beddingtoncdeangelis functional response. Appl Math Comput2014; 226: 581–588.
3.
ParkPKoJWJeongC.Reciprocally convex approach to stability of systems with time-varying delays. Automatica2011; 47: 235–238.
4.
ZhangCKHeYJiangL, et al. Notes on stability of time-delay systems: bounding inequalities and augmented Lyapunov-Krasovskii functionals. IEEE Trans Automat Contr2016; 62: 5331–5336.
5.
LeeTHParkJH.A novel Lyapunov functional for stability of time-varying delay systems via matrix-refined-function. Automatica2017; 80: 239–242.
6.
LiXWangRDuS, et al. An improved exponential stability analysis method for discrete-time systems with a time-varying delay. Int J Robust Nonlinear Control2022; 32(2): 669–681.
7.
ConteGPerdonAZattoniE, et al. Disturbance decoupling and model matching problems for discrete-time systems with time-varying delays. Nonlinear Anal Hybrid Syst2021; 41: 101043.
8.
DaiZXuLGeSS.Attracting sets of discrete-time Markovian jump delay systems with stochastic disturbances via impulsive control. J Franklin Inst2020; 357(14): 9781–9810.
9.
ZhangCKHeYJiangL, et al. Delay-variation-dependent stability of delayed discrete-time systems. IEEE Trans Automat Contr2016; 61(9): 2663–2669.
10.
SeuretAGouaisbautFFridmanE.Stability of discrete-time systems with time-varying delays via a novel summation inequality. IEEE Trans Automat Contr2015; 60(10): 2740–2745.
11.
WillemsJC.Dissipative dynamical systems part I: general theory. Arch Ration Mech Anal1972; 45(5): 321–351.
12.
ZhangXHeSStojanovicV, et al. Finite-time asynchronous dissipative filtering of conic-type nonlinear Markov jump systems. Sci China Inf Sci2021; 64(5): 1–12.
13.
BrogliatoBLozanoRMaschkeB, et al. Dissipative systems analysis and control: theory and applications. Meas Sci Technol2013; 12(12): 2211.
14.
MathiyalaganKRagulR.Observer-based finite-time dissipativity for parabolic systems with time-varying delays. Appl Math Comput2022; 413: 126605.
15.
DoratoP.Short-time stability in linear time-varying systems. New York, NY: Polytechnic Institute of Brooklyn, 1961.
16.
ShenYHuangY.Global finite-time stabilisation for a class of nonlinear systems. Int J Syst Sci2012; 43: 73–78.
17.
LvWWangFZhangL.Adaptive fuzzy finite-time control for uncertain nonlinear systems with dead-zone input. Int J Control Autom Syst2018; 16: 2549–2558.
18.
LuSWangXLiY.Adaptive neural network finite-time command filtered tracking control of fractional-order permanent magnet synchronous motor with input saturation. J Franklin Inst2020; 357(18): 13707–13733.
19.
ChenMSunJKarimiHR.Input-output finite-time generalized dissipative filter of discrete time-varying systems with quantization and adaptive event-triggered mechanism. IEEE Trans Cybern2019; 50(12): 5061–5073.
20.
GaoHShiKZhangH, et al. Finite-time event-triggered extended dissipative control for a class of switched linear systems. Int J Control Autom Syst2021; 19(8): 2687–2696.
21.
LiuYMaY.Finite-time non-fragile extended dissipative control for ts fuzzy system via augmented Lyapunov-Krasovskii functional. ISA Trans2021; 117: 1–15.
22.
LiLWangTXiaY, et al. Trajectory tracking control for wheeled mobile robots based on nonlinear disturbance observer with extended Kalman filter. J Franklin Inst2020; 357(13): 8491–8507.
23.
YimHYAChengK-KM. Novel dual-band planar resonator and admittance inverter for filter design and applications. In: Proceedings of the 2005 IEEE MTT-S International Microwave Symposium Digest, Long Beach, CA, USA, June 2005, pp.2187–2190.
24.
MauldinFWLinDHossackJA.The singular value filter: a general filter design strategy for pca-based signal separation in medical ultrasound imaging. IEEE Trans Med Imaging2011; 30(11): 1951–1964.
25.
GaoXDengFZhangH, et al. Reliable H∞ filtering of semi-Markov jump systems over a lossy network. J Franklin Inst2021; 358: 4528–4545.
26.
GuZZhouXZhangT, et al. Event-triggered filter design for nonlinear cyber-physical systems subject to deception attacks. ISA Trans2020; 104: 130–137.
27.
ChangXHYangGH.Non-fragile H∞ filter design for discrete-time fuzzy systems with multiplicative gain variations. Inf Sci2014; 266: 171–185.
28.
SuXShiPWuL, et al. A novel approach to filter design for T–S fuzzy discrete-time systems with time-varying delay. IEEE Trans Fuzzy Syst2012; 20(6): 1114–1129.
29.
WeiFChenGWangW.Finite-time stabilization of memristor-based inertial neural networks with time-varying delays combined with interval matrix method. Knowledge Based Syst2021; 230: 107395.
30.
MaoXLamJXuS, et al. Razumikhin method and exponential stability of hybrid stochastic delay interval systems. J Math Anal Appl2006; 314(1): 45–66.
31.
ZhangHWangZLiuD.Robust stability analysis for interval Cohen–Grossberg neural networks with unknown time-varying delays. IEEE Trans Neural Netw2008; 19(11): 1942–1955.
32.
LiuJRanGHuangY, et al. Adaptive event-triggered finite-time dissipative filtering for interval type-2 fuzzy Markov jump systems with asynchronous modes. IEEE Trans Cybern2021; PP(99): 1–13.
33.
WeiFChenGWangW.Finite-time synchronization of memristor neural networks via interval matrix method. Neural Networks2020; 127: 7–18.
34.
ChenGGaoYZhuS.Finite-time dissipative control for stochastic interval systems with time-delay and Markovian switching. Appl Math Comput2017; 310: 169–181.
35.
SongJNiuYWangS.Robust finite-time dissipative control subject to randomly occurring uncertainties and stochastic fading measurements. J Franklin Inst2016; 354(9): 3706–3723
36.
ChenHLiZXiaW.Event-triggered dissipative filter design for semi-Markovian jump systems with time-varying delays. Math Probl Eng2020; 2020(1C3): 1–13.
37.
SakthivelRNithyaVMaYK, et al. Finite-time nonfragile dissipative filter design for wireless networked systems with sensor failures. Complexity2018; 2018: 1–13.
38.
KimSH.Asynchronous dissipative filter design of nonhomogeneous Markovian jump fuzzy systems via relaxation of triple-parameterized matrix inequalities. Inf Sci2019; 478: 564–579.
39.
AslamMSLiQ.Quantized dissipative filter design for Markovian switch T–S fuzzy systems with time-varying delays. Soft Comput2019; 23: 11313–11329.
40.
AmatoFAriolaMDoratoP.Finite-time control of linear systems subject to parametric uncertainties and disturbances. Automatica2001; 37(9): 1459–1463.
41.
ChenGYiS.Robust H∞ filter design for neutral stochastic uncertain systems with time-varying delay. J Math Anal Appl2009; 353(1): 196–204.
42.
WangYXieLDe SouzaCE.Robust control of a class of uncertain nonlinear systems. Syst Control Lett1992; 19(2): 139–149.
43.
ChenMSunJ.H∞ finite time control for discrete time-varying system with interval time-varying delay. J Franklin Inst2018; 355(12): 5037–5057.