
Abstract
The fractional order PID (FOPID) controller has been found to have the potential to provide more flexibility in the design options than the integer order PID (IOPID) controller. However, in the FOPID controller design practice, investigations are still required in selecting the achievable design specifications and controller parameters. In order to obtain a practical tuning method for the FOPID controller, taking the first order plus integral systems as the plants, the complete achievable regions of the design specifications are collected and analyzed. In addition, the selectable integral and derivative orders of the FOPID controller are also collected and modeled. With the prior knowledge obtained, a synthesis method for the FOPID controller is proposed to make the control system achieve the desired flat-phase characteristic. To verify the effectiveness of the proposed method, the synthesis method is applied to design the FOPID controller for the permanent magnet synchronous motor (PMSM) speed servo system. Simulation and experimental results show that system with the FOPID controller can achieve satisfying tracking performance and disturbance rejection performance.
Introduction
Fractional calculus obtains the extended description and control scope by extending the integral and derivative orders to be real number.1–3 As a result, fractional order controller provides the possibility to offer better control performance than the conventional integer order controller.4,5 It has been found that the fractional order PID (FOPID) controller can provide more control options and better control performance than the PID controller because of the introduction of two tunable orders.6–8 However, due to two extra degrees of freedom, more sophisticated strategies need to be considered in designing the FOPID controller.
In general, the tuning methods for the FOPID controller can be summarized into the optimization methods and the analytic methods. The optimization methods tune the controller parameters by optimizing the objective functions, which are often customized according to the requirements on system performance, such as the dynamic performance, stability, and robustness. 9 In addition, the objective functions are often optimized under the constraints characterizing the specific requirements in actual systems. For example, a fuzzy FOPID controller is tuned by a dynamic particle swarm optimization method. 10 An optimal FOPID controller is designed by minimizing the time-domain performance index under the frequency-domain constraints. 11 In the engineering applications of these optimization methods, sufficient time and high-performance micro-controllers may be needed for the optimization process.
The “flat-phase” method is an analytic design method for the FOPI/D controller. Under the flat-phase specification, the frequency characteristic of the control system is configured to a desired shape with nearly constant phase at the middle frequency range. 12 The FOPI/D controller parameters can be obtained by solving three equations derived from the design specifications. However, to tune the FOPID controller with five parameters, the flat-phase design method needs modifying. At present, some simplification strategies have been developed to establish the relations between the parameters of the FOPID methods and then reduce the degrees of freedom of the FOPID controller from five to three.13,14 Taking advantage of these simplification strategies, the flat-phase design method can be applied to tune the FOPID controller. 15 However, with the reduced degrees of freedom, the tuning flexibility and control performance of the FOPID controller may be limited. Another practical strategy is to select the integral and derivative orders of the controller before applying the flat-phase specification. However, there may be little prior knowledge about the selection of the fractional orders. Moreover, although the FOPID controller has been found to obtain more flexibility in the design options, rules of thumb are still required for the selection of the design specifications.
In this paper, taking the typical first order plus integral system as the plant, the selection of the design specifications and fractional orders in tuning the FOPID controller to achieve the flat-phase characteristic is studied. The complete achievable regions of the design specifications for the FOPID controller design are collected. In addition, the complete selectable regions of the controller’s orders are also collected and analyzed with a neural network based scheme. In this way, with the prior knowledge obtained, a synthesis method for the FOPID controller is proposed to make the system achieve the specified design specifications and flat-phase characteristic. Compared with the existing optimization methods,9–11 the proposed method is simpler in implementation because the optimization process is avoided. Moreover, the FOPID controller tuned by the proposed method may achieve better dynamic performance over those tuned by the existing simplified analytic methods13–15 because all the tunable components of the FOPID controller are kept. To verify the effectiveness of the proposed method, the synthesis method is applied to design the FOPID controller for the permanent magnet synchronous motor (PMSM) speed servo system. The robustness and control performance of the obtained FOPID controller are tested by simulations and experiments. In addition, comparative studies are performed between the FOPID controller tuned by the proposed method, the optimal FOPID tuned by the existing methods, and the commonly used CRONE controller.
The main contributions of this paper can be summarized as follows.
The complete achievable regions of the design specifications in designing the FOPID controller for the first order plus integral systems are collected and analyzed, providing the prior knowledge in selecting the design specifications.
The complete selectable regions of the integral and derivative orders of the FOPID controller are also collected and analyzed, presenting a practical guideline on tuning the FOPID controller.
A synthesis method is developed according to the priori knowledge to simplify the tuning of the FOPID controller, creating a wide potential application scope of the proposed method.
The rest of this paper is organized as follows: the problems of the flat-phase design method in tuning the FOPID controller are discussed in Section 2; the achievable regions of the design specifications and fractional orders for the FOPID controller design are collected and analyzed in Section 3, and then a FOPID controller synthesis method is proposed; application studies of the proposed method to the PMSM speed servo system are presented in Section 4; the conclusion is presented in Section 5.
Problem description
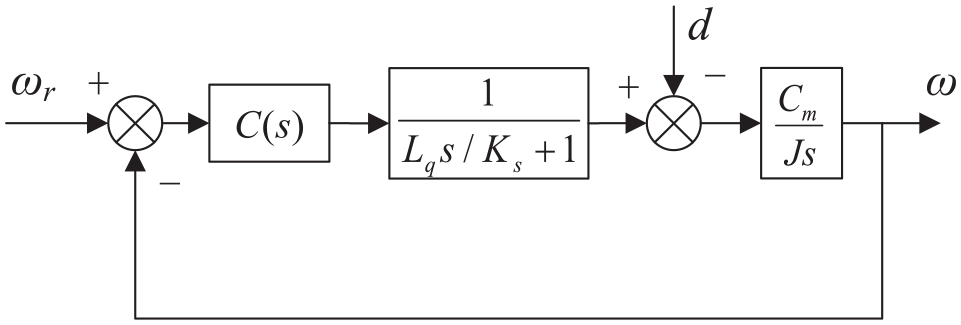
Consider a unit negative feedback system with a plant
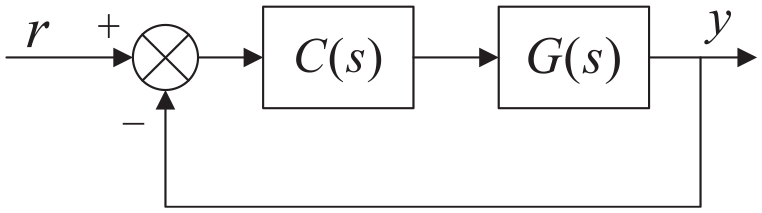
The feedback control system.
The FOPID controller is introduced as the feedback controller, which can be represented as

where
The flat-phase specification is represented as (2),

where


As can be seen, three equations can be derived according to the flat-phase design method, but the FOPID controller has five degrees of freedom. To obtain the controller parameters, a simple way is to determine the fractional orders
However, two problems should be considered in tuning the FOPID controller. First, for some plants and design specifications, the feasible solution of the controller parameters cannot be obtained. Therefore, the design specifications
This paper targets the problems in selecting the design specifications (

where
Synthesis method for the FOPID controller
Design specifications selection
The selection of the design specifications is studied by collecting the achievable regions of
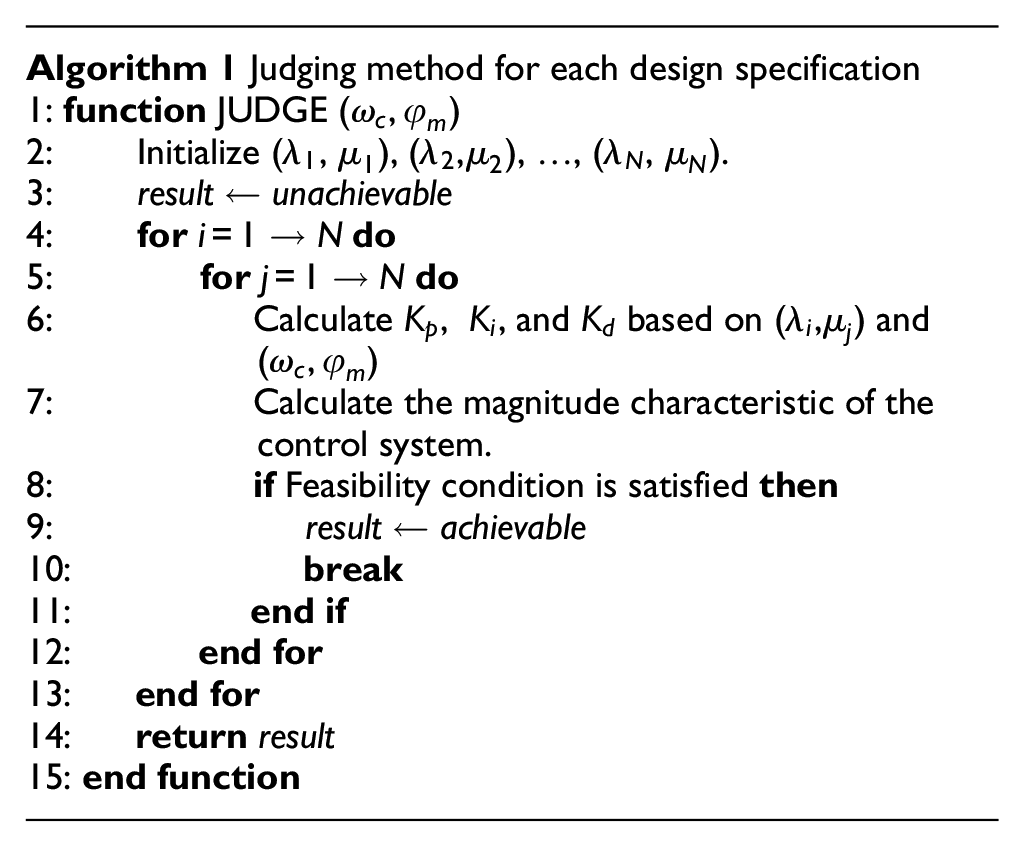
An enumeration based algorithm is designed to judge whether a design specification (
Setting
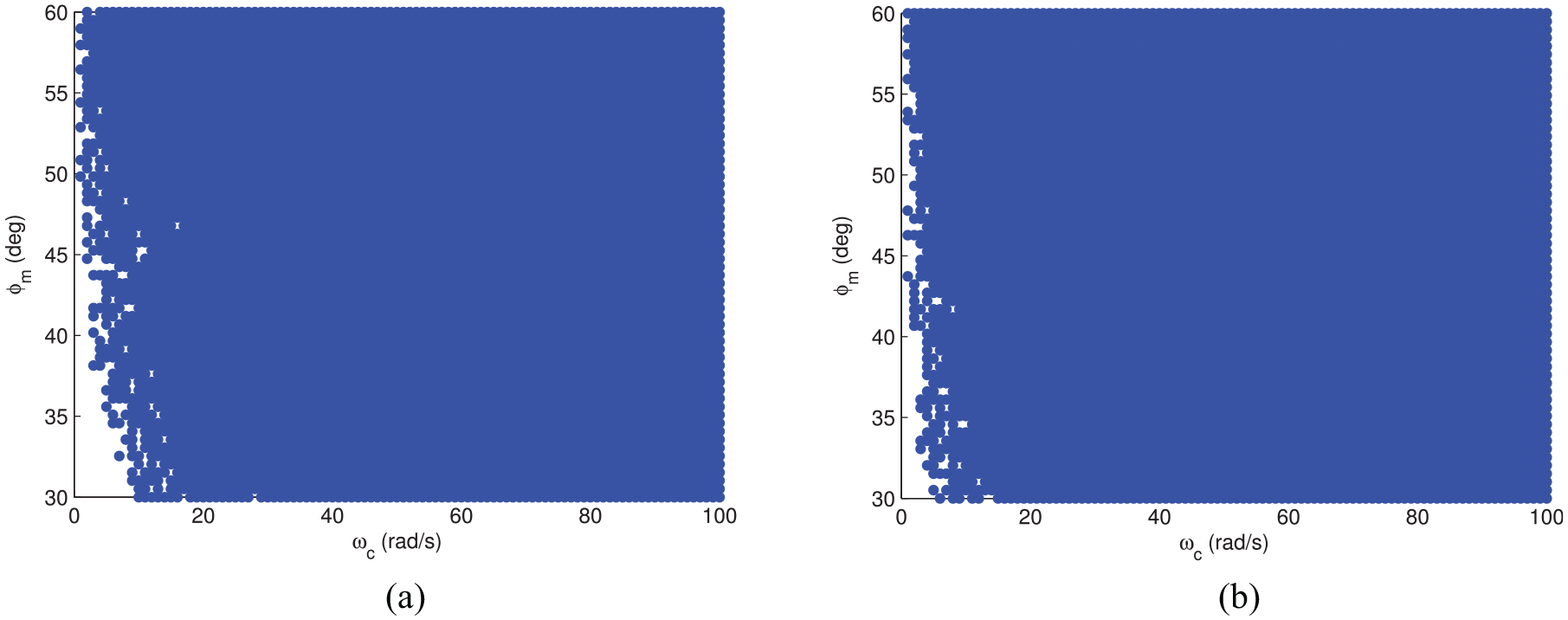
The achievable regions of
The achievable regions of
In actual applications, the achievable design specifications should be selected before the FOPID controller is designed. However, it may be impossible to collect all the achievable design specifications. Based on the collected samples, various kinds of tools can be adopted to estimate the feasibility of the candidate design specifications, for example, the look-up table, and the advanced classifiers based on learning machines. 20
Selection of the fractional orders
According to the flat-phase design method, when the design specification (
Similarly, an enumeration based algorithm is designed as follows to collect all the selectable combinations of (
Initialize the (
Solve the FOPID controller for each (
Check whether the FOPID controller obtained satisfies the given restrictions (the same as mentioned in Section 3.1). If so, the corresponding (
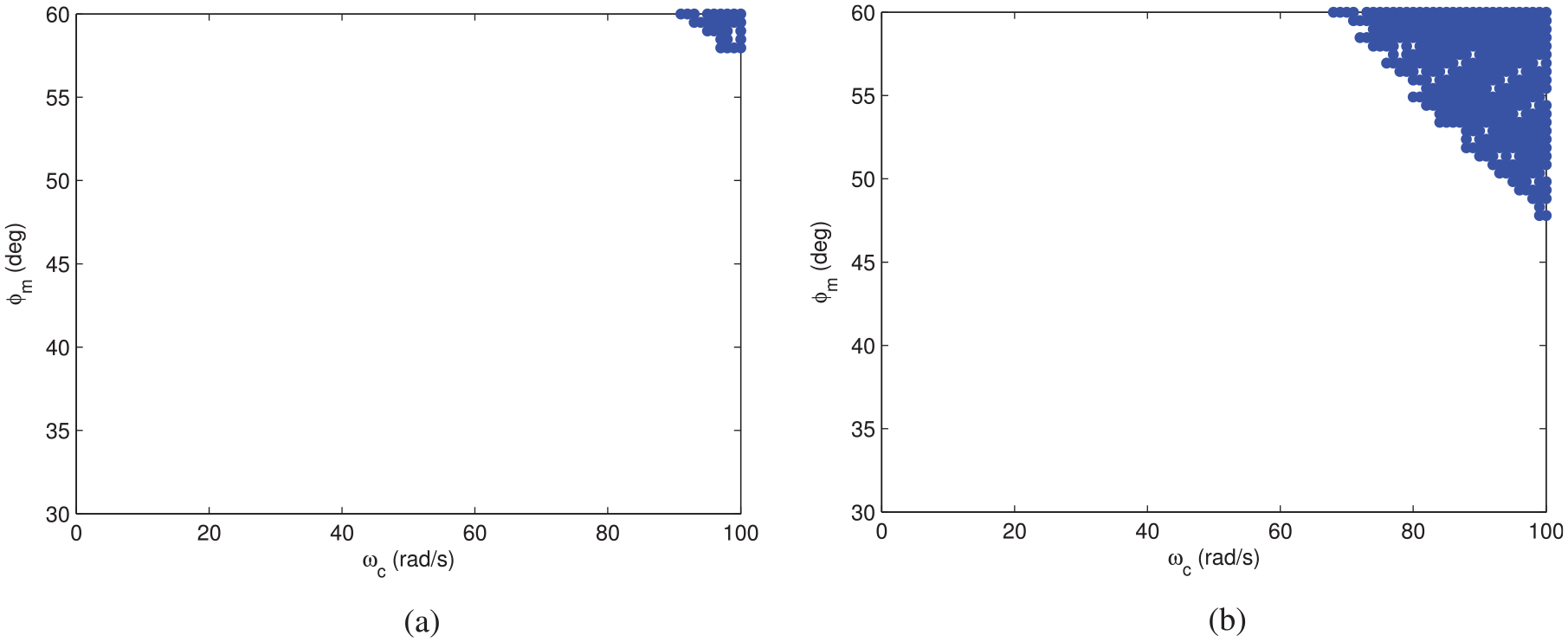
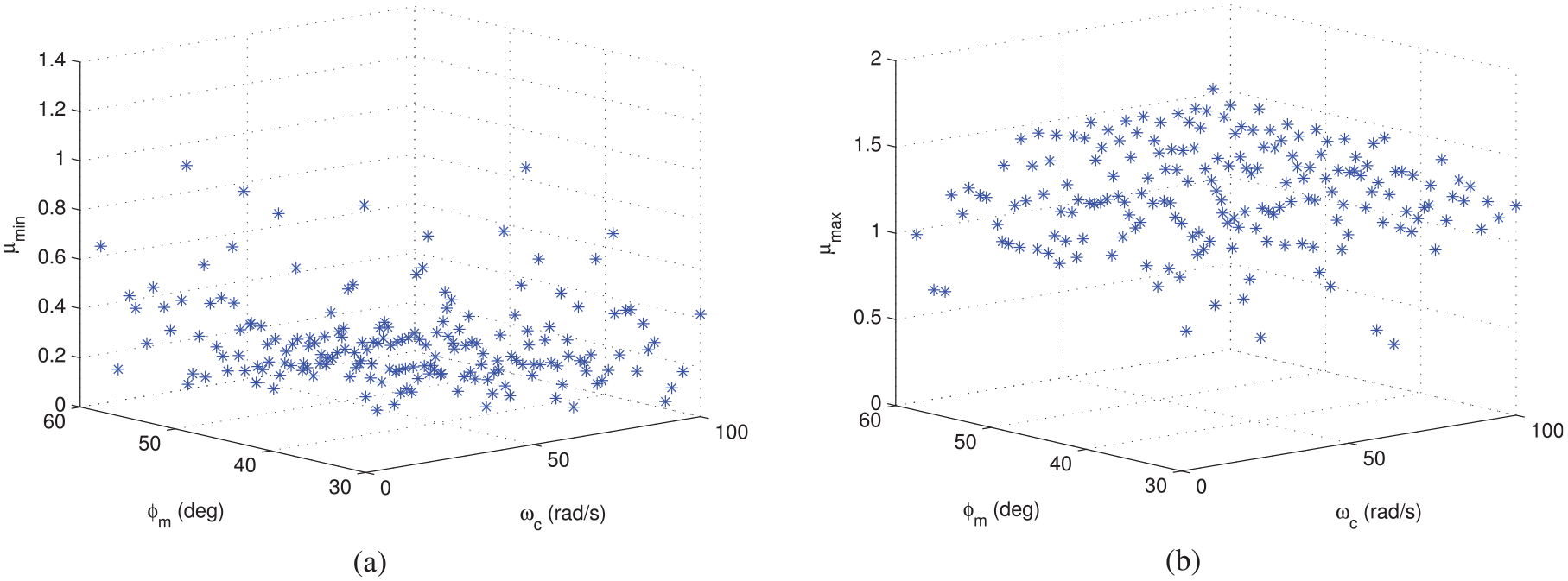
Applying the collecting method above on each achievable design specification, the selectable regions of the fractional orders for different design specifications and plants can be obtained. Figure 4(a) and (b) show two selectable regions of
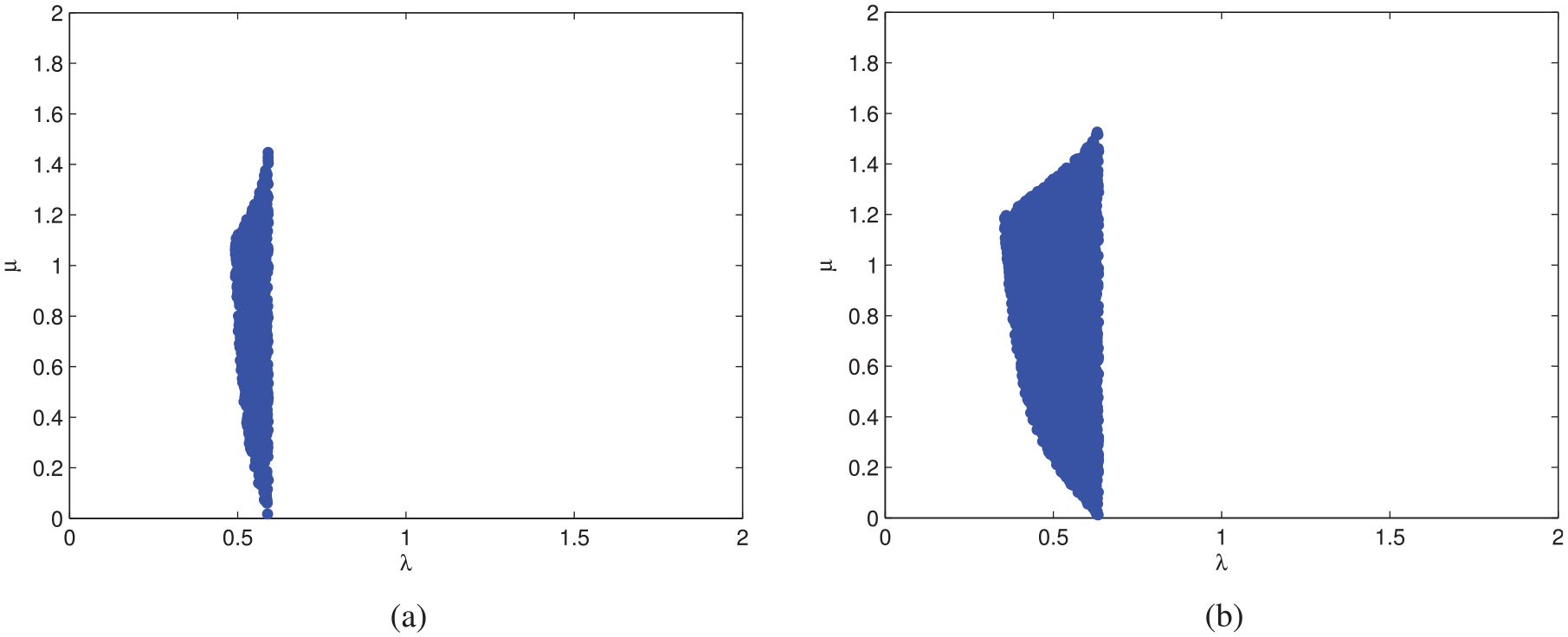
The selectable region of
From Figure 4(a) and (b), it can be observed that the shape of the selectable region varies with
Firstly, the maximum and minimum values of
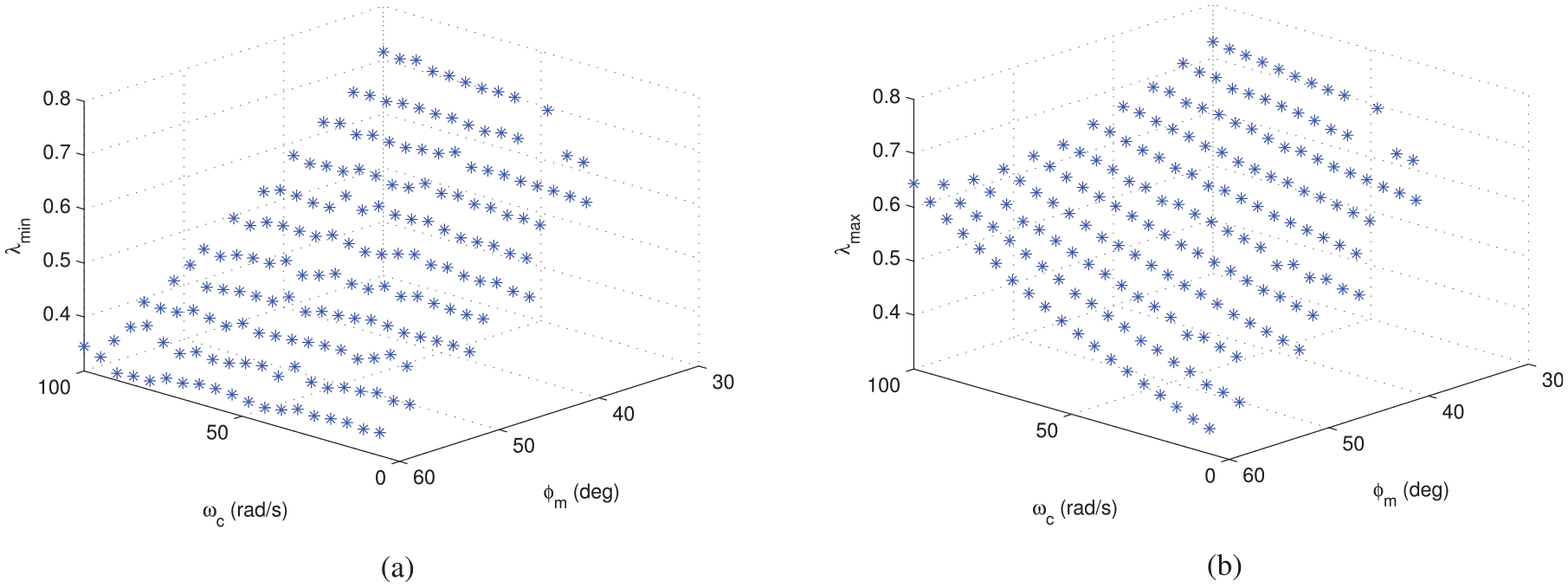
The distributions of
The input vector of the model is selected as [
The feedforward multi-layer neural network is adopted to estimate the lower and upper limits of
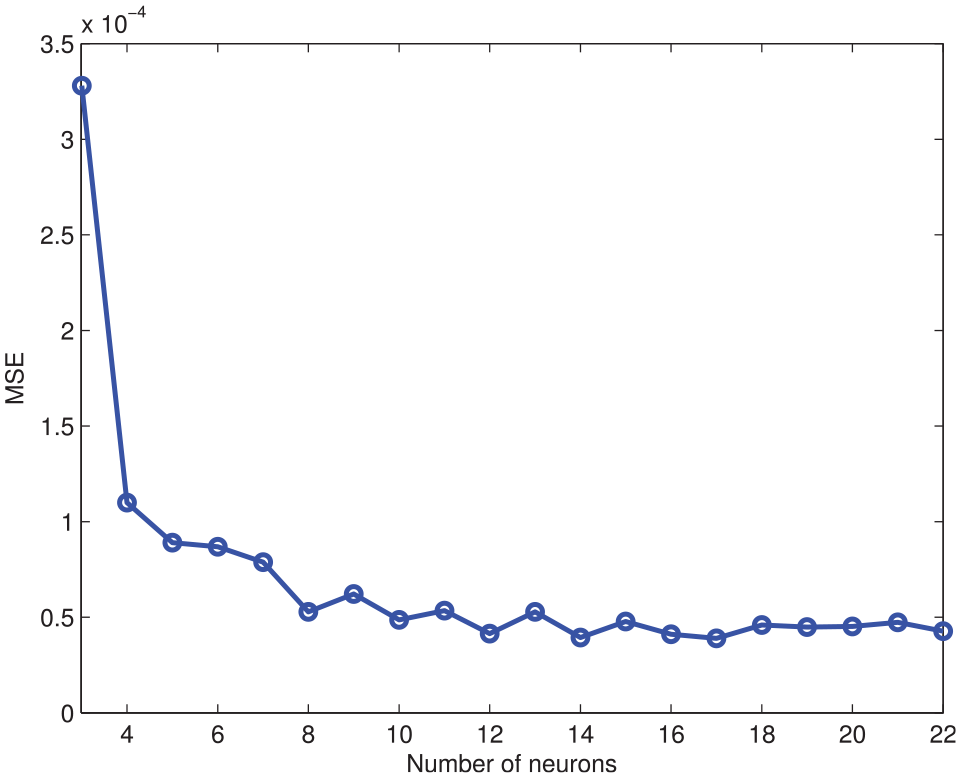
The MSE of the testing set with respect to the number of neurons.
The training of the neural network stops after 91 cycles of training. The MSE of the training, validation and testing sets during the training process is plotted in Figure 7, respectively. From Figure 7, it can be seen that the estimation error of the network has converged to minimum. In addition, the predicted and actual outputs of
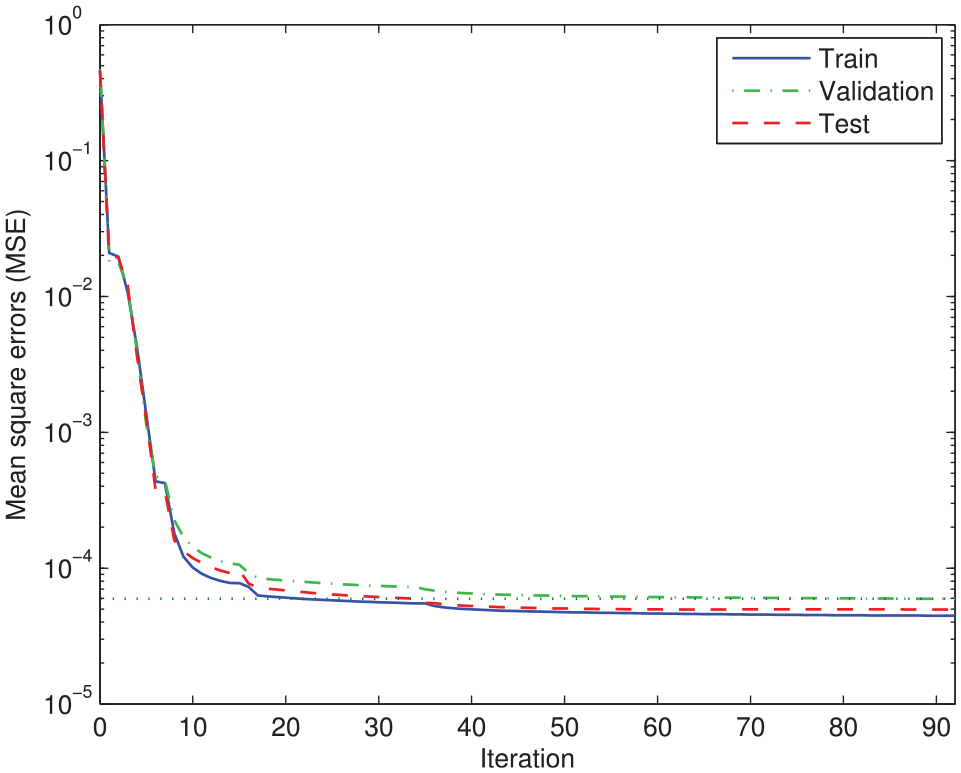
The variations of the MSE of the training, validation and testing sets.
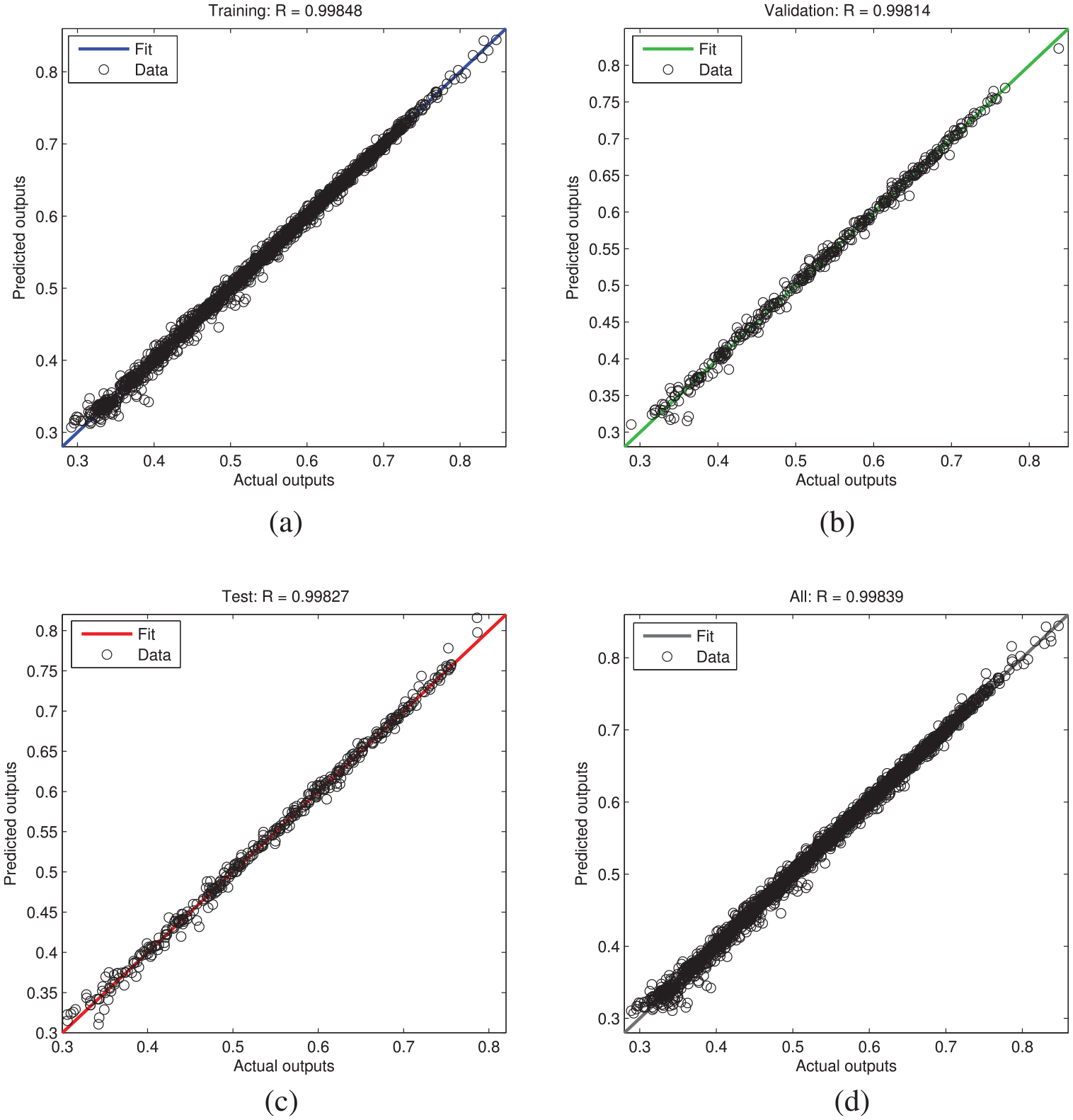
The predicted and actual outputs of
Secondly, the maximum and minimum values of
The distributions of
All the samples of
The value distributions of

Controller design
In actual applications, the FOPID controller can be tuned according to the following steps. First, the design specification (
Application study
PMSM speed servo plant
The proposed synthesis method is applied to the FOPID controller design for a real PMSM servo system. Adopting the commonly used


where

Then the

Combining (7) and (9), the PMSM speed servo system can be represented as Figure 10, where
The dynamic diagram of PMSM speed servo systems.
It is well known that the PMSM servo system is a typical nonlinear system, where various kinds of uncertainties and disturbances exist, such as unmodeled dynamics, parameter uncertainties and disturbance torques. 26 The composite control scheme incorporating a feedback controller and feedforward compensation has been known as an effective way to deal with such systems. Currently, feedforward compensation strategies have been developed to eliminate the effect of the uncertainties and disturbances.27,28 In this paper, we focus on the feedback controller which is often used to guarantee the stability and dynamic performance of the control system.
Simulation results
Robustness to gain variations
According to the specification of the PMSM, the PMSM speed servo plant is represented as follows,

According to (10), an achievable design specification is given as

The open-loop Bode diagram of the system using
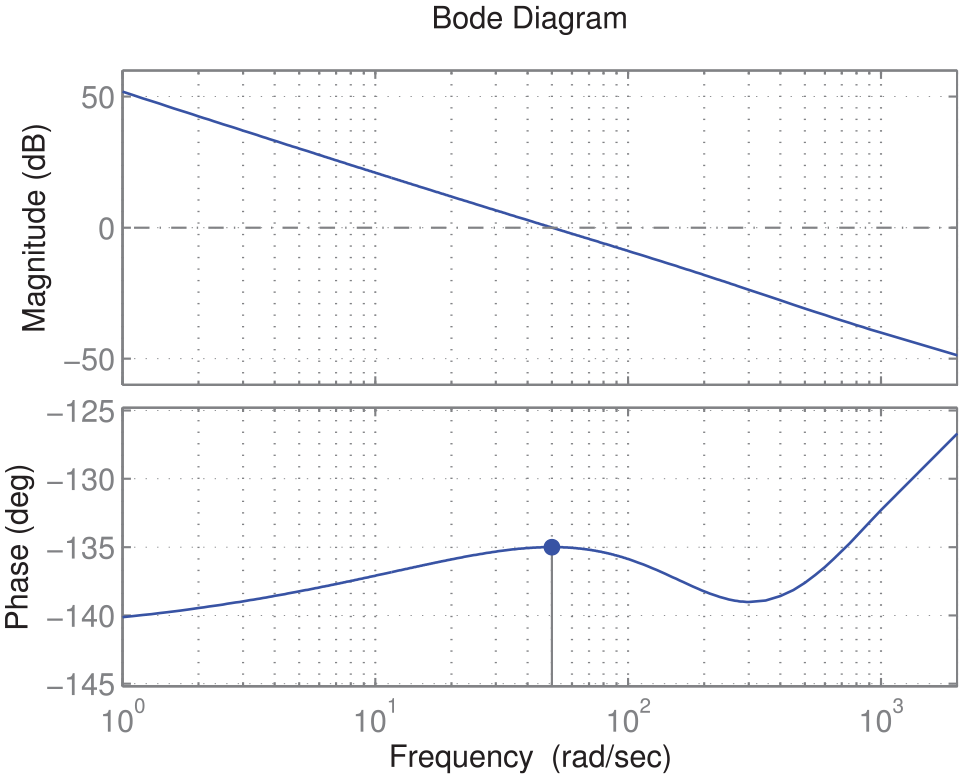
The open-loop Bode plot of the system with
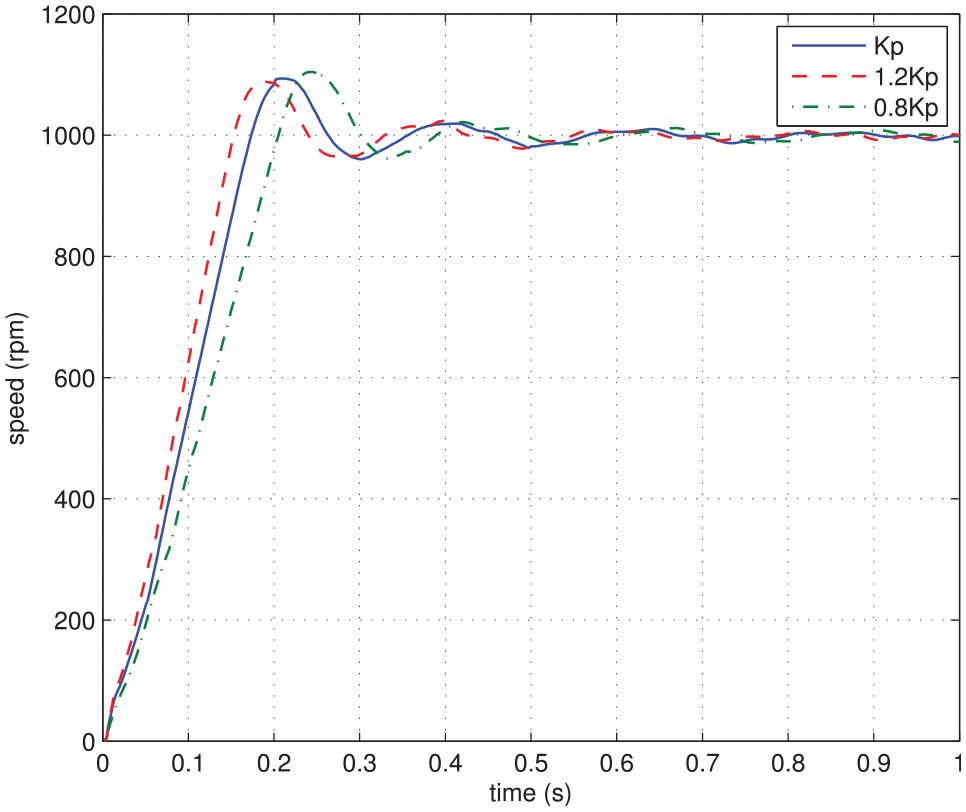
To test the system’s robustness to gain variations, step response simulations are performed on the control systems with different plant model gains. The speed responses of the nominal system and the systems with
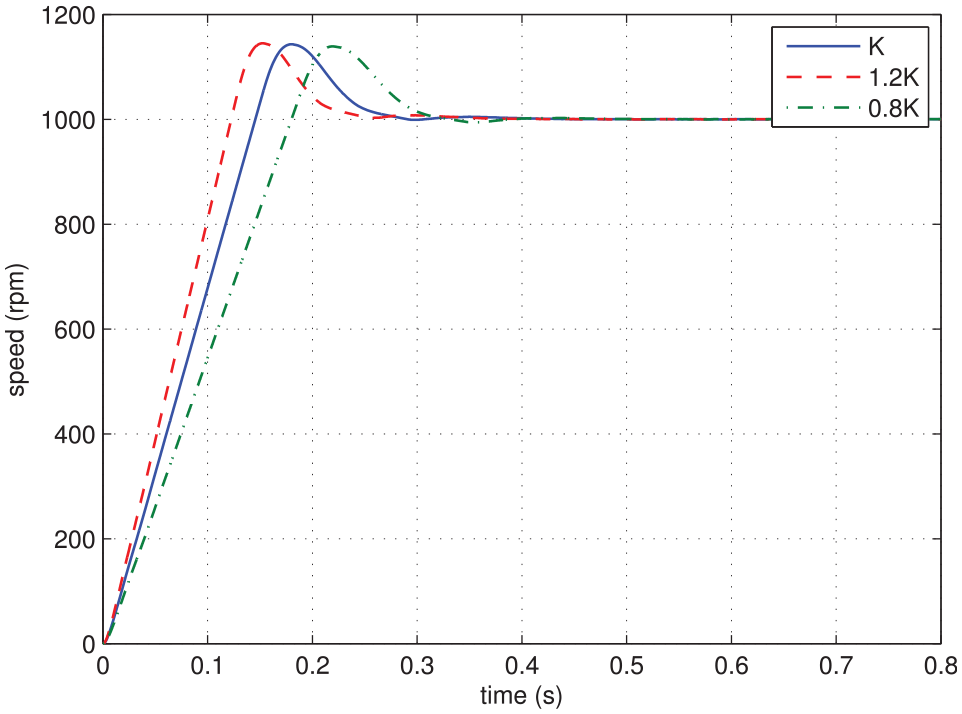
The gain robustness test (simulation).
Comparison with some existing methods
To verify the effectiveness of the proposed FOPID controller, performance comparisons are performed between

Secondly, an optimal FOPID controller is designed using the state transition algorithm (STA), 30 with the integrated time absolute error (ITAE) adopted as the objective function, yields,

Thirdly, a second generation CRONE controller is designed according to the same design specification as used to design the FOPID controller

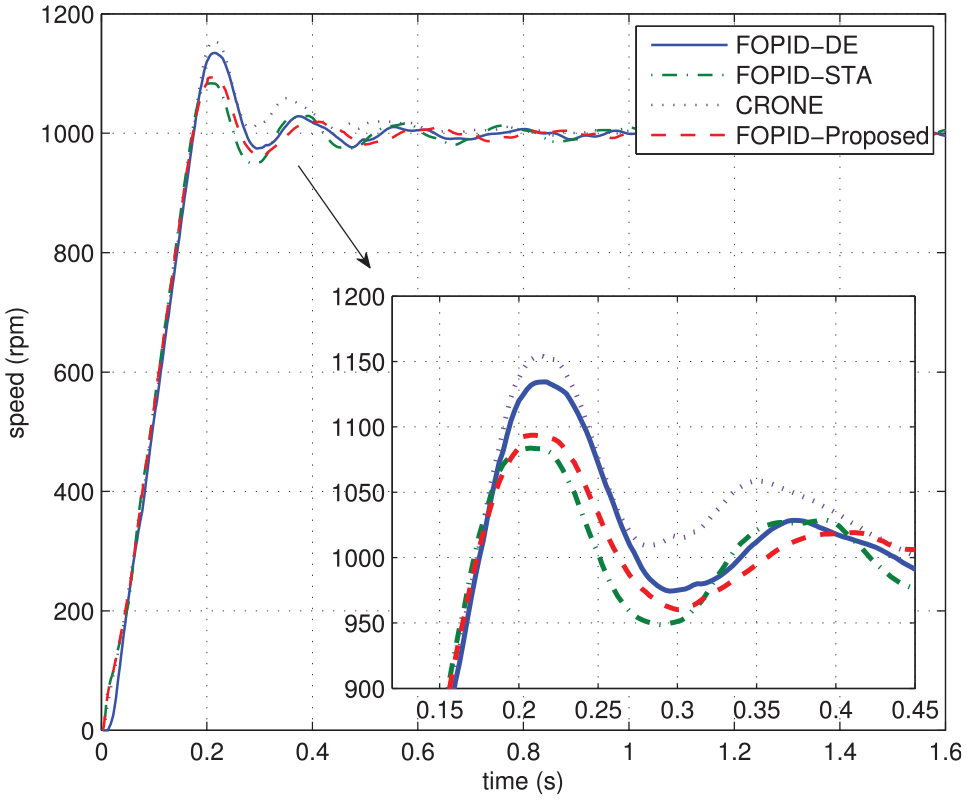
Step response simulations are carried out, using
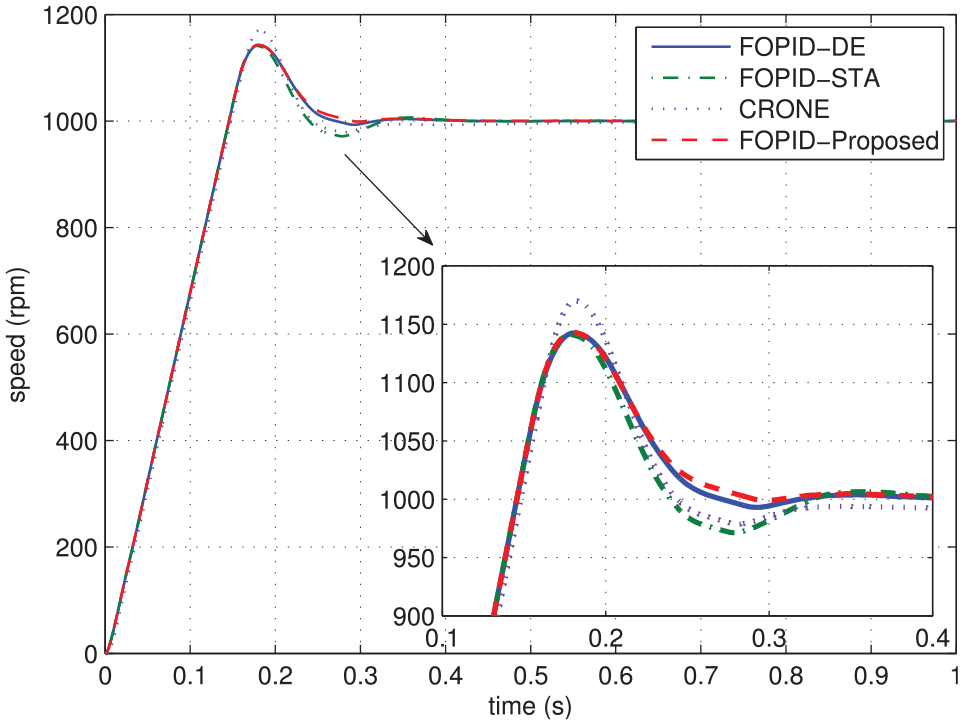
The step response tests (simulation).
The step response performance indices (simulation).

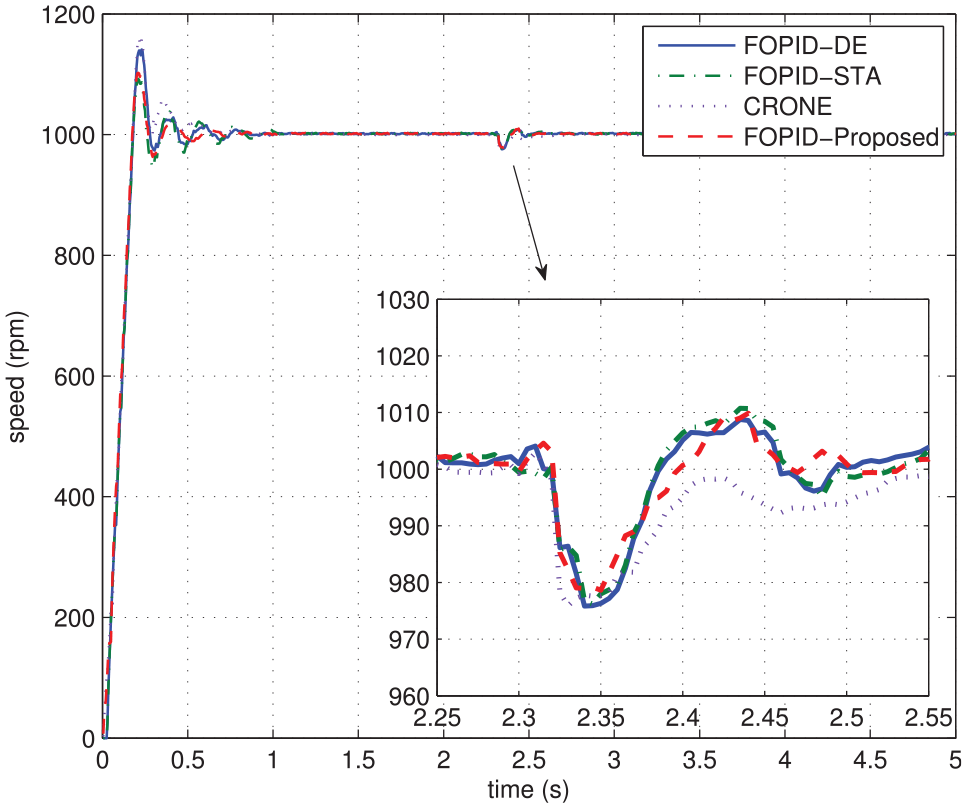
Load disturbance response simulations are carried out. A load torque is imposed when the PMSM is running in a steady state. The speed responses of the control systems using the FOPID-DE, FOPID-STA, CRONE, and FOPID-Proposed are plotted in Figure 14. In addition, the performance indices of four systems are presented in Table 3, respectively. It can be observed that, the load disturbance responses of four control systems are close to each other.
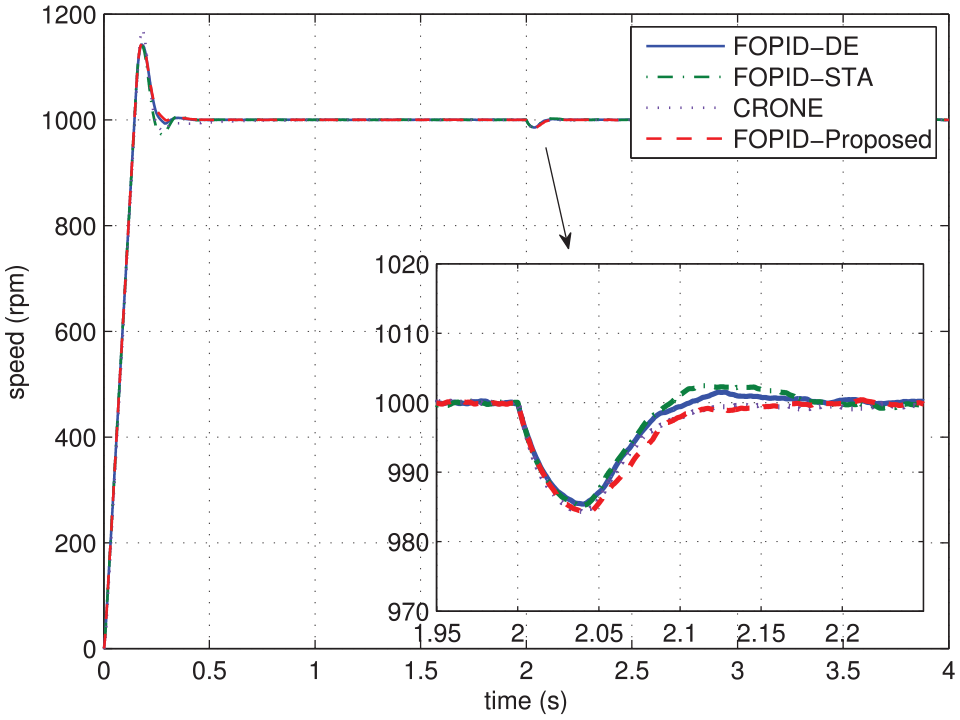
The load disturbance response tests (simulation).
The load disturbance rejection performance indices (simulation).

Experimental results
The PMSM speed control experimental test rig is shown in Figure 15. The experimental platform consists of a PMSM (model: P10B18200BXS), a DC generator, a resistance box, a servo driver and its PC interface. The motor control programs are implemented by the TMS320F28335 digital signal processor (DSP). Specifically, the fractional operator
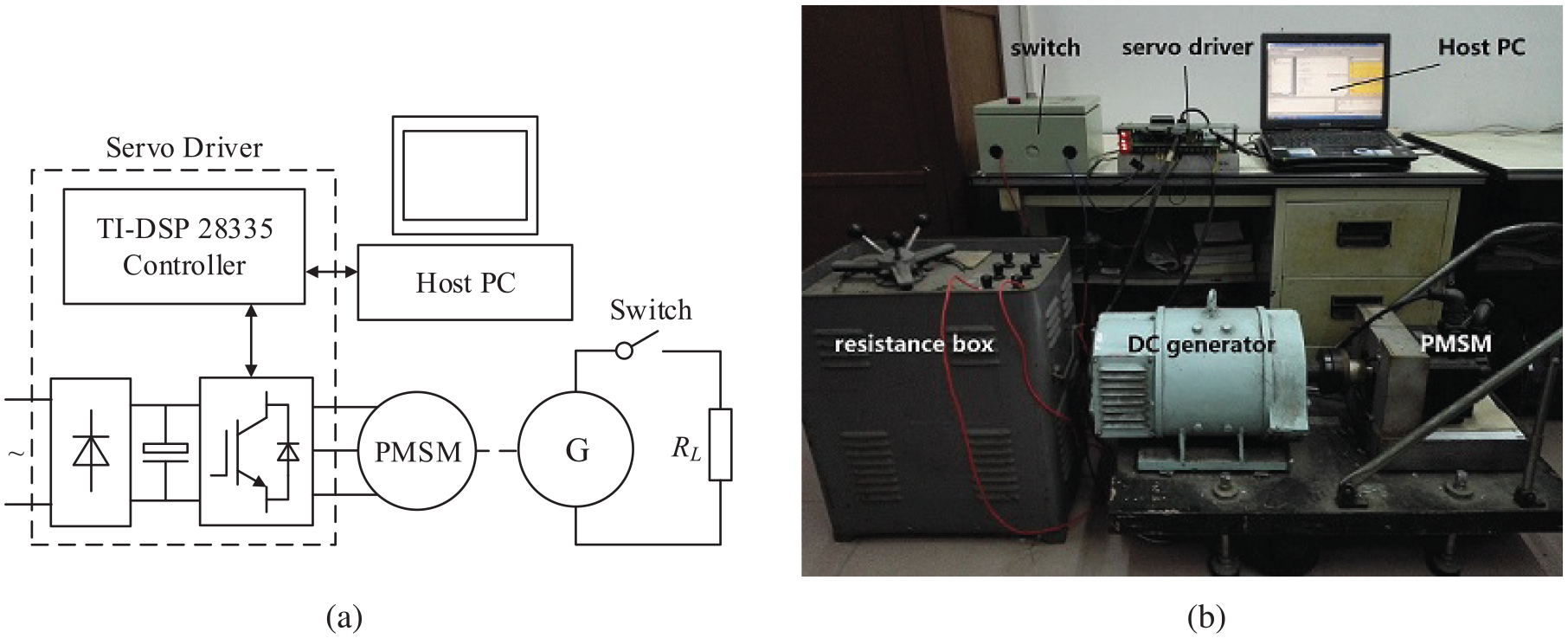
The PMSM experimental test rig: (a) configuration and (b) setup.
Robustness to gain variations
Gain robustness test experiments are performed on the system with
The gain robustness test (experiment).
Comparison with some existing methods
Step response experiments are performed, using
The step response tests (experiment).
The step response performance indices (experiment).

The load disturbance responses of the systems using the FOPID-DE, FOPID-STA, CRONE, and FOPID-Proposed are plotted in Figure 18. In addition, the performance indices are presented in Table 5. It can be observed that, the load disturbance responses of four systems are close to each other.
Load disturbance response tests (experiment).
The load disturbance rejection performance indices (experiment).

According to the simulation and experimental results, it can be concluded that the FOPID controller designed by the proposed synthesis method can guarantee the control system to achieve the desired robustness and dynamic performance, which are close to those of the systems using the optimized FOPID controllers.
Conclusion
Considering the feedback control problem of the first order plus integral plant, a synthesis method for the FOPID controller is developed by studying the achievable regions of the design specifications and controller parameters. Applying the synthesis method, the robust control system satisfying the specified design specification can be obtained without complicated optimization. The robustness and control performance of the FOPID controller designed by the proposed method are verified by both simulation and experiments. The advantages of the proposed method is demonstrated by the comparison with some existing methods. For other classes of plants, the prior knowledge may be obtained following the similar strategy and the success of the FOPID controller synthesis method may be duplicated. Some open issues will be studied in the future works, for example, the synthesis strategies to meet more general requirements and the engineering application of the synthesis method.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was funded by the Natural Science Foundation of Guangdong, China (grant no. 2019A1515110180), the National Natural Science Foundation of China (grant no. 62173150 and 61803087), the Projects of Guangdong Provincial Department of Education (grant no. 2017KQNCX215 and 2019KZDZX1034).