
Abstract
A novel internal model control (IMC) method for wave rotor refrigeration process (WRRP) based on Harris hawks optimization (HHO) is presented in this paper. Firstly, an identification model is established by the test data of the WRRP. In order to reduce the complexity of the model, the Routh order reduction method was used to reduce the order of the identification model. This procedure yields an approximate second order model with time delay for the WRRP. Secondly, an IMC method based on HHO is proposed after analyzing the time delay characteristics of the WRRP model. This method improves the traditional IMC structure, and introduces a three degree of freedom IMC structure. The parameters of the controller are optimized by HHO to make the comprehensive performance index of the system reach the best. Simulation results demonstrate that the proposed method can achieve a good performance of tracking and disturbance rejection.
Keywords
Introduction
Wave rotor refrigerator process (WRRP) is a gas expansion refrigeration device which uses the pressure wave moving in the oscillating tube to realize the separation of cold and heat. Its refrigeration principle mainly uses the expansion cooling of gas expansion wave and shock wave pressurization to achieve the energy transfer and transformation between gases. WRRP has the advantages of simple structure, low production cost, suitable for liquid containing work and strong adaptability to the working environment. At present, WRRP has been successfully applied to the pressure energy recovery of natural gas, light hydrocarbon recovery, low-temperature wind tunnel and other related engineering fields. 1 The proportional-integral-derivative (PID) control scheme is usually adopted for the temperature control of wave rotor refrigeration process. Due to the unique structure and operation mode of the WRRP, the control system exists large time delay, which will increase the difficulty of PID parameter tuning and the performance of control system is not good enough. How to feed back the control results to the WRRP timely and reliably to improve the refrigeration efficiency is an urgent problem to be solved.
In recent years, many scholars have studied the control methods of time delay systems and proposed different types of PID controller design methods. 2 Anwar and Pan 3 proposed a PID controller design method based on frequency response matching for the integral processes with time delay. Ajmeri and Ali 4 designed a controller of the modified Smith predictor for the pure integration, integration plus first-order and double integration processes with large time delay, and the direct synthesis method is used to adjust the set point tracking controller. In Panda 5 and Ribić and Mataušek 6 parameters of PID controller are set based on the principle of dead-time compensation. These methods can enhance the disturbance rejection performance of the system and have the advantages of simple structure, but the PID controller can only be applied to the system with small time delay. The ratio of time delay to time constant of this kind of system model must be limited to a certain range. Garcia and Morari 7 proposed internal model control (IMC) strategy based on identification model. According to the internal correspondence between IMC and traditional PID, many scholars designed IMC-PID controller, which achieved good control effect.8–14 Some PID controller tuning methods based on IMC for stable and unstable time-delay processes were proposed, and achieved expected control effect. After analyzing the analytical relationship between the robustness index of the control system and the controller parameters based on the maximum sensitivity, Jin et al. 12 proposed a simple IMC-PID tuning method, which converted the IMC controller to PID form in terms of the time domain rather than the frequency domain. For the second-order process with time delay, an IMC-PID controller cascaded with a lead-lag compensator is designed in Shamsuzzoha and Lee, 13 the control effect is selected by adjusting the parameters. In Chia and Lefkowitz, 14 it modeled the integration process as a first-order lag with a very large time constant, and designed a PID controller to assure zero steady-state error for setpoint changes and process disturbance inputs. Singh et al. 15 proposed a two degree of freedom IMC combined with the model reduction method, which was applied to the power system, and achieved desired dynamic response and robustness against load disturbance. Although the IMC parameters tuning rules are given in Refs.,8–15 there are still many parameters to be adjusted, and the control performance is not necessarily the best. Especially when the reference model is inaccurate, the capability of target tracking and disturbance rejection as well as robustness of the control system must be compromised. At this time, it is more difficult to meet the design requirements to adjust the parameters by experience. Therefore, Refs.16–20 applied some optimization algorithms to adjust the parameters, such as particle swarm optimization algorithm (PSO),16,17 genetic algorithm (GA)18,19 and so on. In Zeng et al, 16 an IMC-PID controller based on PSO algorithm for core power control of molten salt breeder reactor was designed. Wang et al. 19 proposed a multiple-model based IMC method for power control of small pressurized water reactor, and the IMC filter time constant is determined by multi-objective optimization using the non-dominated sorting genetic algorithm-II. Nisi et al. 20 proposed a multi-objective optimization method to tune the PID controller parameters, improved the performance of process in terms of performance index, set point tracking and also provided stability. In this paper, as the WRRP system exists large time delay, which will increase the difficulty of PID parameter tuning and the performance of control system is not good enough. So, we want to research an advanced control method based on model identification method and optimization method for the WRRP to improve the performance of control system. Harris hawks optimization (HHO) is a naturally inspired algorithm proposed by Heidari et al. 24 The HHO is able to efficiently avoid local optimum and immature convergence drawbacks, HHO algorithm provides very promising and competitive results compared to other intelligence optimization algorithms. For these reasons, we present a three degree of freedom IMC control structure based on HHO algorithm for the temperature control of wave rotor refrigeration process.
We firstly collecting the test data and get an approximate second order model with time delay for the WRRP. The IMC method based on HHO is proposed after analyzing the characteristics of the identified model. This modified method improves the traditional IMC structure, and introduces a three degree of freedom IMC control structure. The parameters of the controller are optimized by HHO to make the comprehensive performance index of the system reach the best. Simulation results demonstrate that the proposed method can enable the WRRP to obtain good performance of set point tracking and disturbance rejection as well as robustness simultaneously.
The organization of this paper is arranged as follows. Section 2 presents the dynamical model of WRRP. Design of improved IMC is presented in section 3. The HHO algorithm is introduced in section 4. In section 5, simulation results are performed to validate, to show the effectiveness of the designed controllers and are discussed to emphasize the performance of the proposed control technique in this work, and finally, the conclusion is given in section 6.
Modeling of WRRP
Description of WRRP
A schematic diagram of the WRRP is shown in Figure 1, which mainly including air compressor, dryer, heat exchanger and wave rotor refrigerator (WRR). There are four ports on the WRR, high-pressure (HP) port, low-temperature (LT) port, medium pressure (MP) port and low-pressure (LP) port. Furthermore, the HP and LP ports are air inlets, while the MP and LT ports are air outlets. Each port is equipped with a valve to control the gas pressure. The gas is compressed by the compressor and dried by the adsorption dryer, and then HP gas flows into the WRR from the HP port, the wave rotor rotates to refrigerate. After energy exchange, the gas that flows out of WRR through the MP port flows back to the wave rotor through the LP port after dumping heat to the cooling water, finally, the cold gas flows out of the LT port.1,21
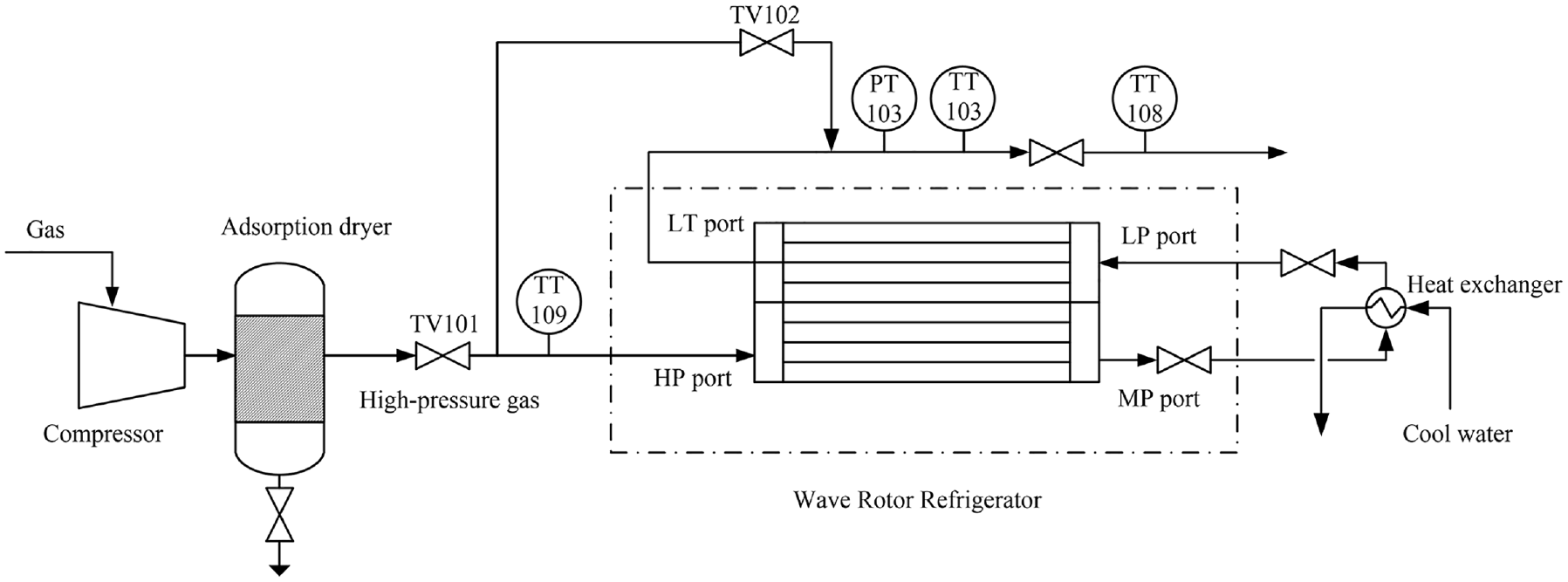
Schematic diagram of the WRRP.
In the WRRP, the temperature and pressure of the output gas are directly related to the working efficiency of the WRR, which are important indexes to measure the performance of the WRR. This paper mainly discusses the relationship between the temperature TT103 of the output gas and the inlet flow TV101 of the WRRP. For the existence of large time delay process dynamic characteristics of the WRRP, a three degree of freedom IMC control structure based on HHO algorithm is proposed in this paper. Firstly, the WRRP model is obtained by system identification and model reduction method based on the process test data, the specific identification algorithm and high-order model reduction algorithm are described in the next subsections.
Model identification algorithm of WRRP
Assuming that the discrete system model of WRRP is as follows:

Its corresponding auto-regressive exogenous (ARX) model difference equation model is as follows:
where
The initial values of

where

To minimize the sum of squares of residuals, namely

Routh order reduction method
Nevertheless, analyzing and designing the high-order model has always been a tough task, it is necessary to select the appropriate model reduction method which can approximate a high-order model to a low-order model keeping the inherent property of the original system. The Routh approximation method characterizes simple calculation, easy acquisition and ensuring the stability of the model. Therefore, the Routh approximation method is used to reduce the order of the model in this paper.22,23
Assuming the transfer function of a higher-order system is in the following form:
where
where

where

and .






where the
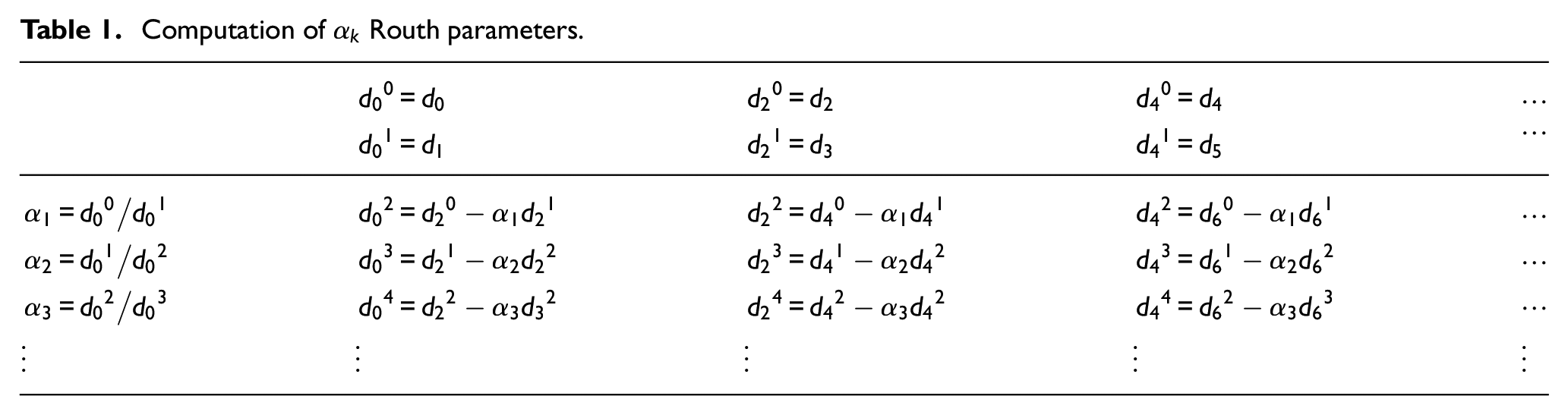
Computation of
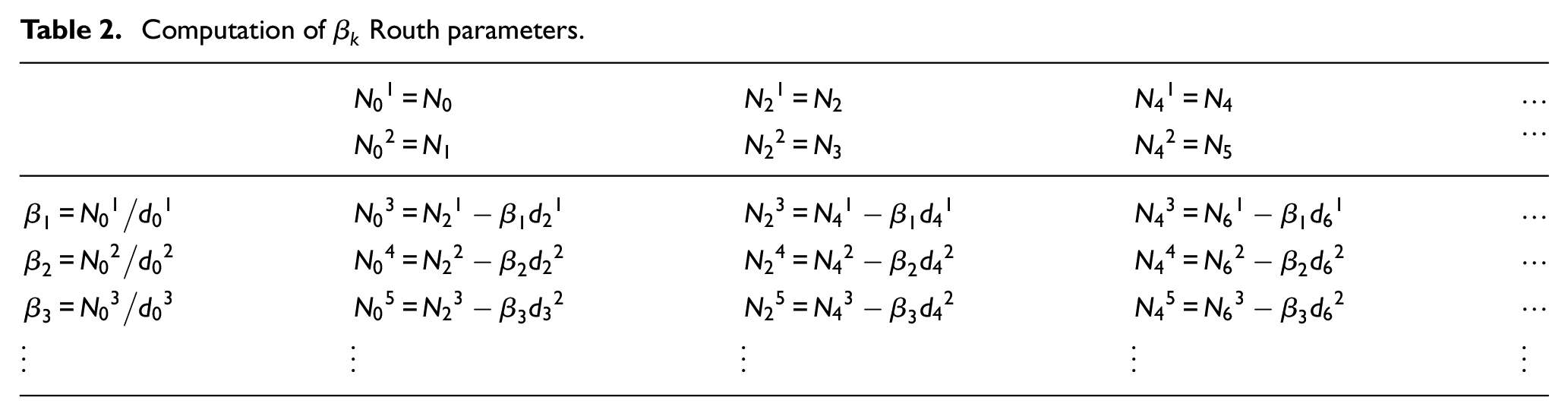
Computation of
Finally, the low-frequency kth-order Routh approximant of the

Modeling results and analysis of WRRP
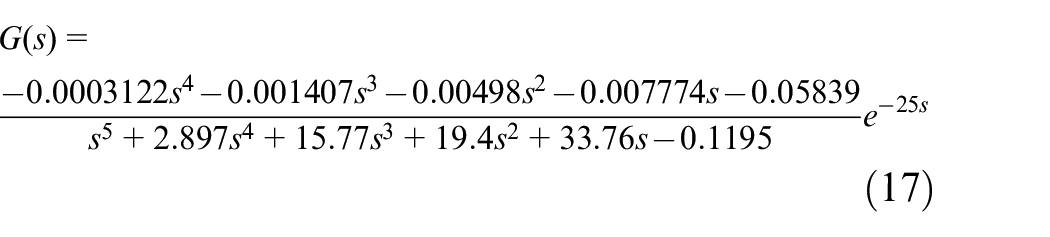
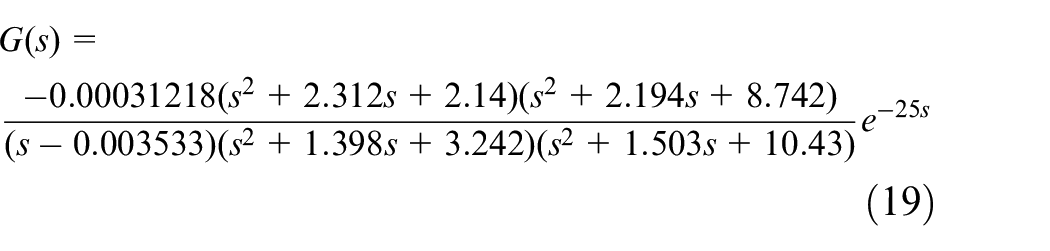
The experimental sample data of output gas temperature TT103 and inlet flow TV101 were recorded in Figure 1. The relationship between output gas temperature TT103 and inlet flow TV101 is modeled, and the identification model is obtained as:
Verify the identification model with the original data, the validation result is as shown in Figure 2, the original data is basically consistent with the data obtained by the ARX model, and the fit index reaches 94.03%. Therefore, it can be considered that the model is very accurate.
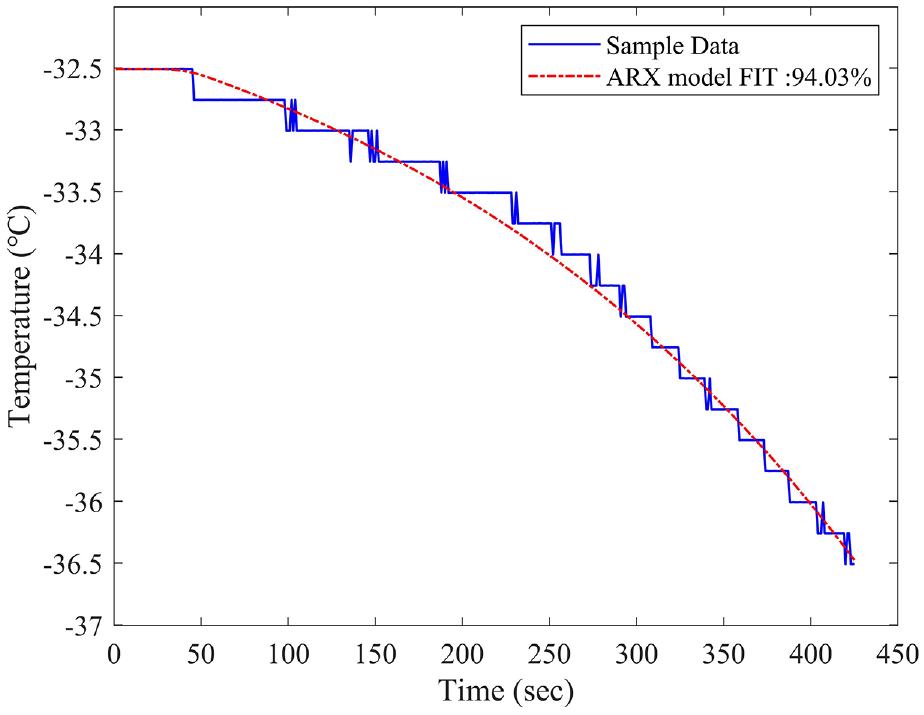
Validation results of the attained ARX model of WRRP.
Since the ARX model is a high-order model, to facilitate the IMC controller design, the Routh approximation method is used to reduce the order and the reduced order model is as follows:

It is necessary to verify
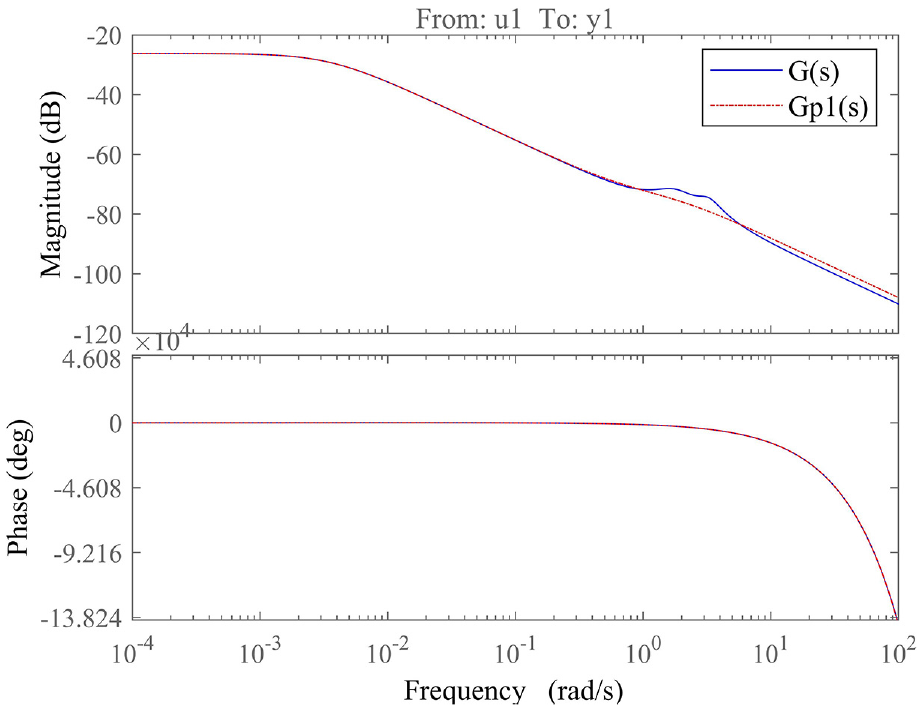
Bode diagram of
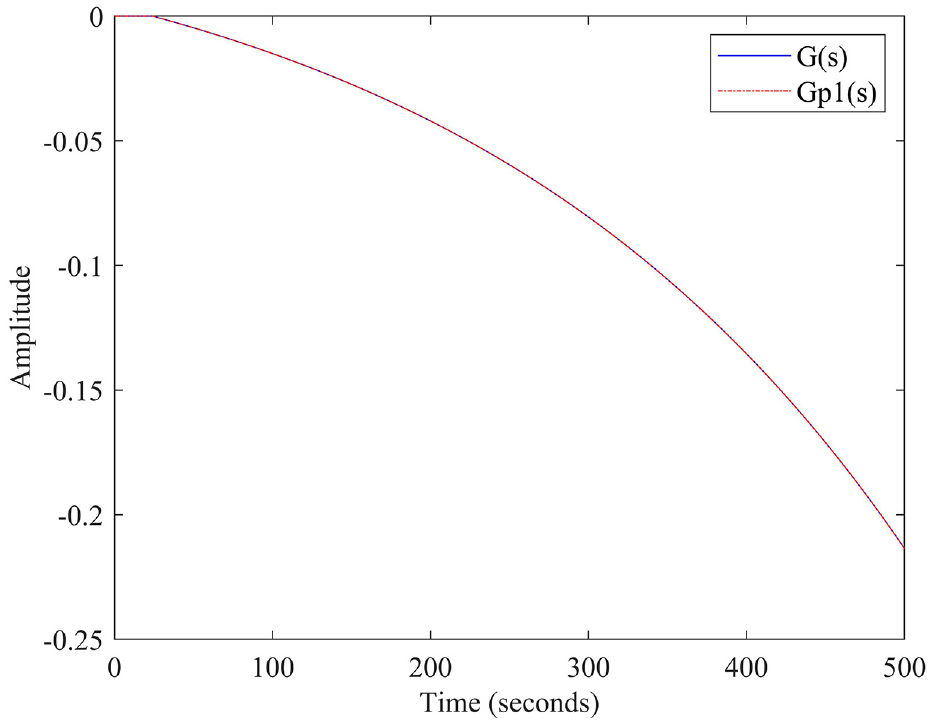
Step response of
There is an unstable pole in the original model

The controlled object is unstable with large time delay, and the expected control effect is hard to achieve by using PID control scheme. Therefore, an improved three degree of freedom IMC strategy with optimization algorithm is proposed for the model
IMC controller design
Structure of improved IMC
An improved IMC structure is proposed in this paper for the controlled object
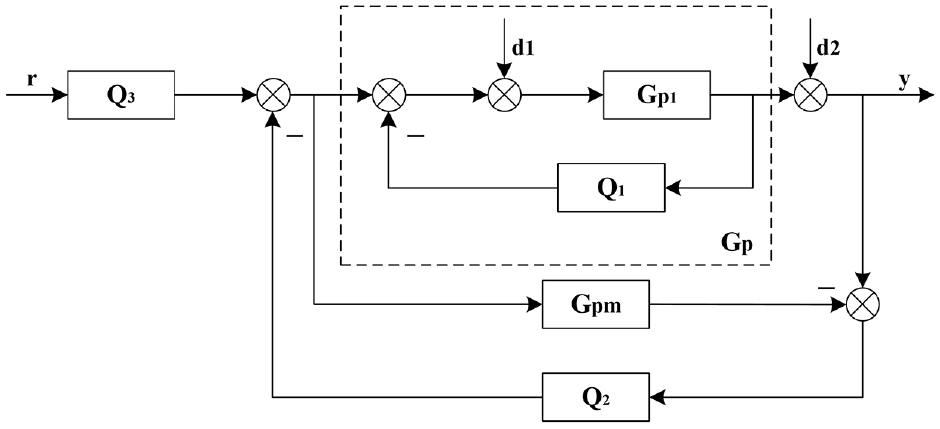
Block diagram of the improved IMC structure.
In Figure 5,

The transfer function of the system is formulated as:

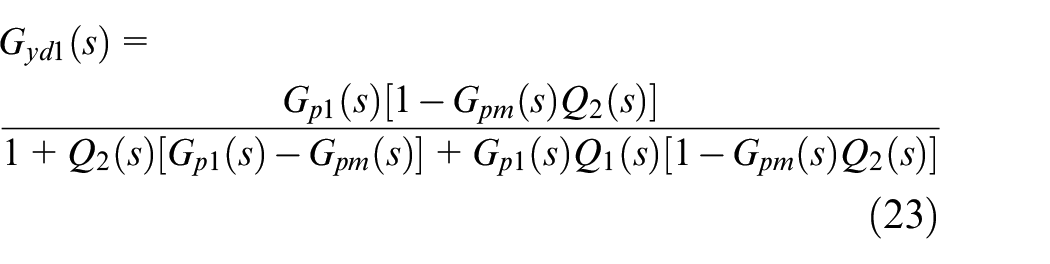
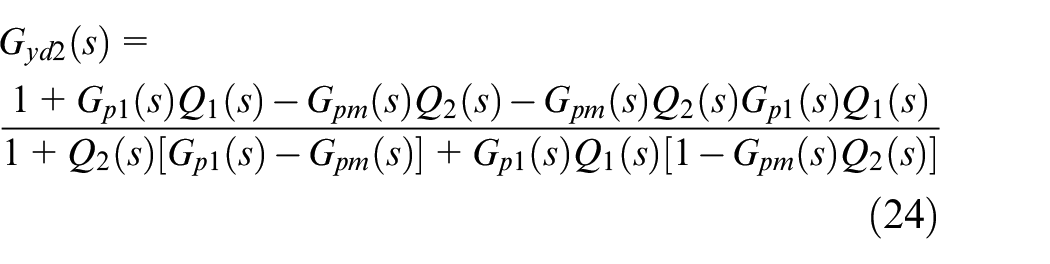
Substituting Eq. (21) into Eq. (22- 24) gives following forms:



Assuming



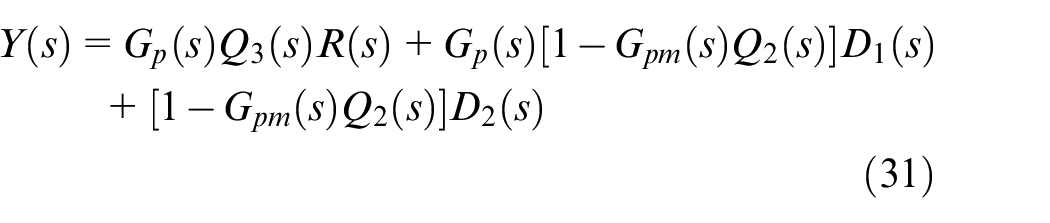
The output of the system can be expressed as:
According to section 2, the model of WRRP is a second-order unstable time-delay model, and its format is as follows:

where
Design the secondary loop controller Q1(s)
To make the controlled object stable, the controller
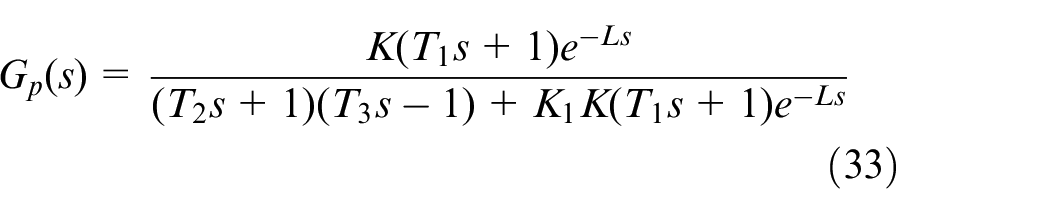
The time delay term in the denominator of the Eq. (33) is approximated by Taylor expansion:
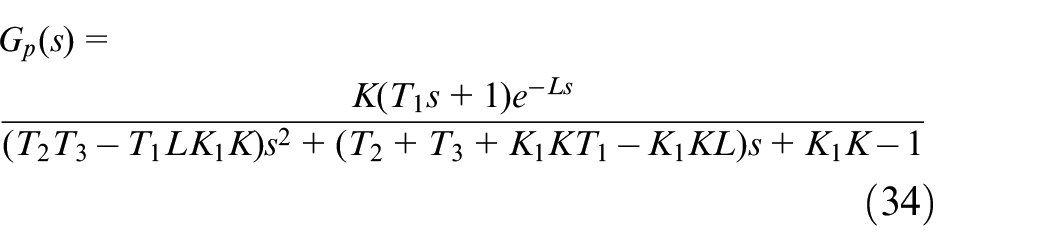
In order to make the system stable, according to the characteristic equation in Eq. (34), the value scope of

By adjusting the value of
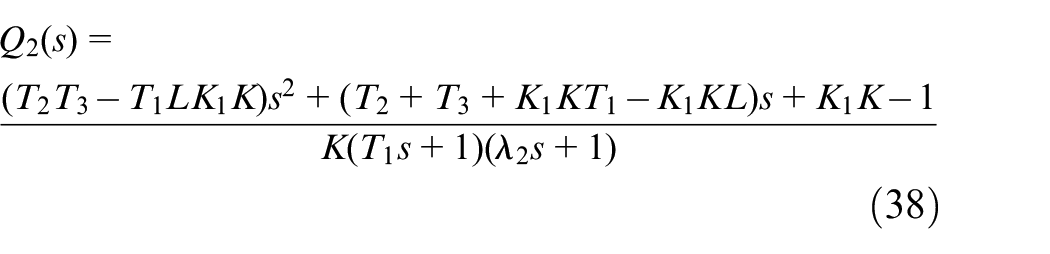
Design the primary loop controller
According to Eq. (31),

where

where
From Eq. (34) and (36), the
Design the setpoint filter controller
From Eq. (31), the controller

where

where
According to Eq. (34) and (39), the
HHO algorithm for optimized tuning
In this paper, Harris hawks optimization algorithm is adopted for tuning controller parameters. The HHO is a naturally inspired algorithm proposed by Heidari et al. 24 in 2019. It is derived from observing the behavior of Harris hawks when they prey on rabbits and using mathematical formulas to simulate the strategy of Harris hawks in catching prey under different mechanisms. In HHO, Harris hawks are the candidate solutions, and the best candidate solution in each step is considered as the intended prey or nearly the optimum. HHO includes two parts: exploration phase and exploitation phase.
Exploration phase
During initialization in this part Harris hawks randomly perch at a certain position in the search space (LB, UB), and wait to detect a prey based on two strategies, they selectively update their positions with probability
where,
According to the escape energy of prey, HHO algorithm transforms from exploration phase to exploitation phase. The energy change of prey is expressed as:

where
Exploitation phase
In this phase, HHO designs four ways to simulate the hunting strategy of hawks,
Soft besiege
When


where,
Hard besiege
When

Soft besiege with progressive rapid dives
When
where
where
Hard besiege with progressive rapid dives
When
The flowchart of the HHO algorithm is shown in Figure 6.
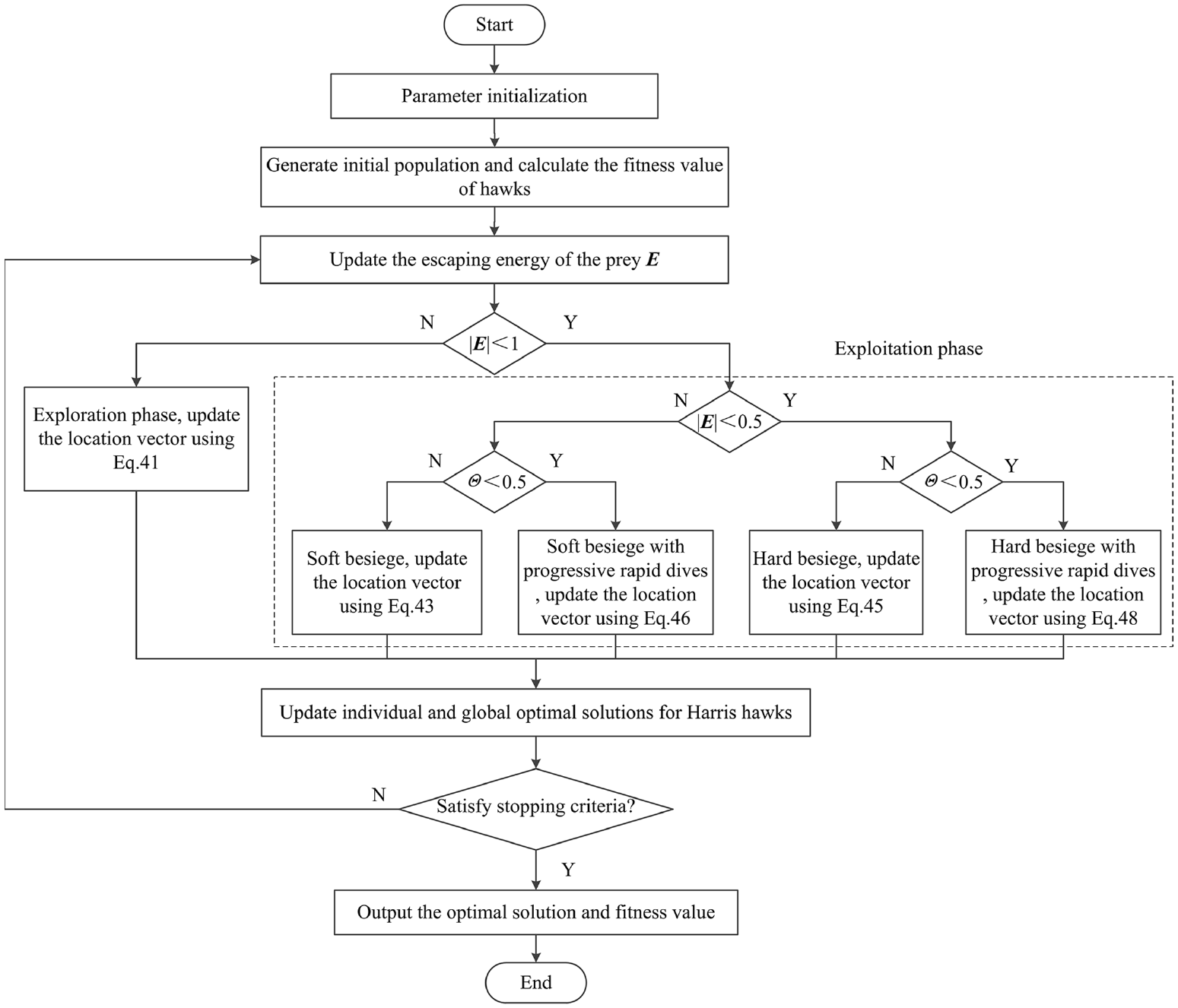
The flowchart of the HHO algorithm.
Results and discussion
Multi-objective optimization for WRRP
As there are several conflicting design objectives need to be simultaneously achieved in the control design problems. If these synthesis objectives are analytically represented as a set of design objective functions subject to the existing constraints, the synthesis problem could be formulated as a multi-objective optimization problem.20,21 In section 3, an improved three degree of freedom IMC structure for the WRRP model is proposed. The controller parameters

where

where

where
In this paper, different





Compare different optimization algorithms
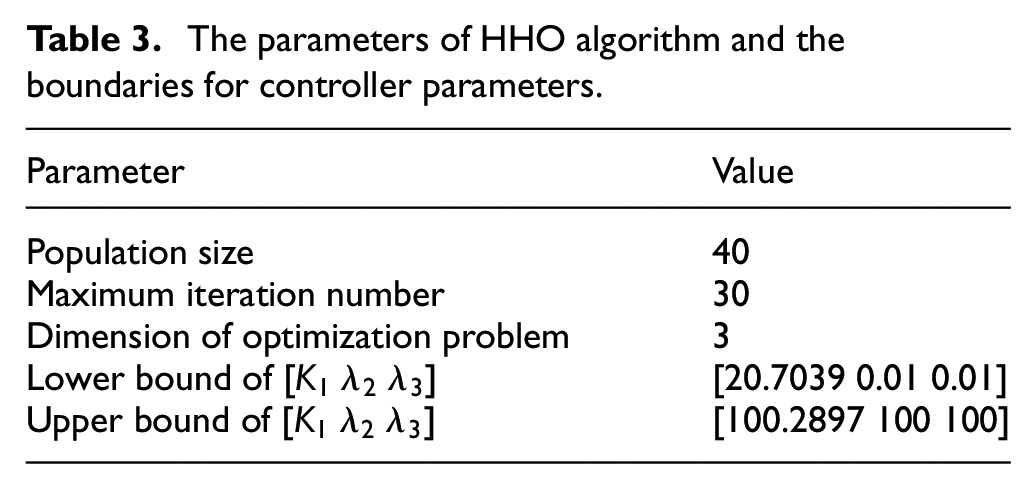
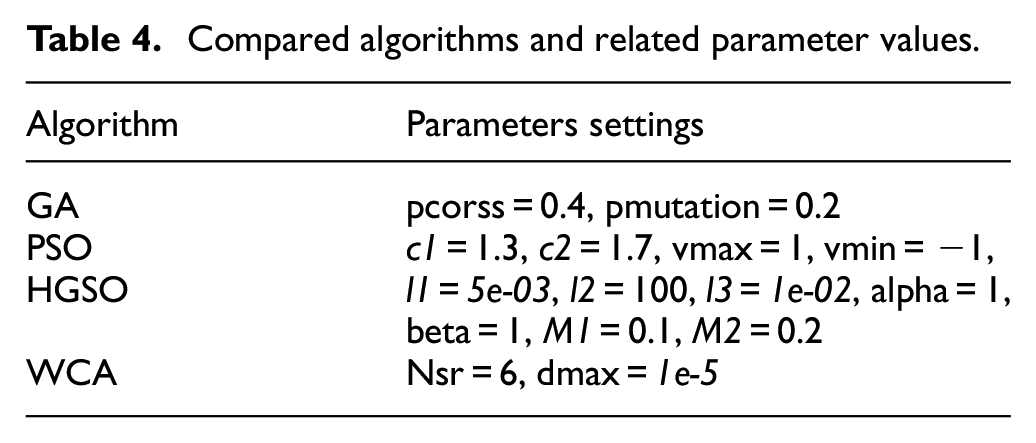
In this paper, the controller parameters
The parameters of HHO algorithm and the boundaries for controller parameters.
Compared algorithms and related parameter values.
Simulation results for step input
Select
Select
Select
Select
Select
Comparison of optimization results with
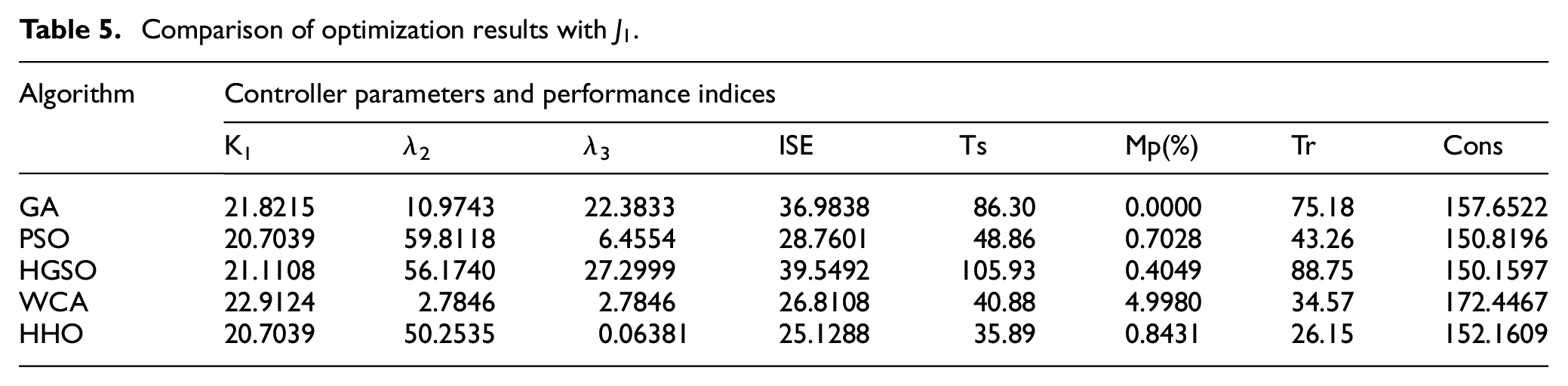
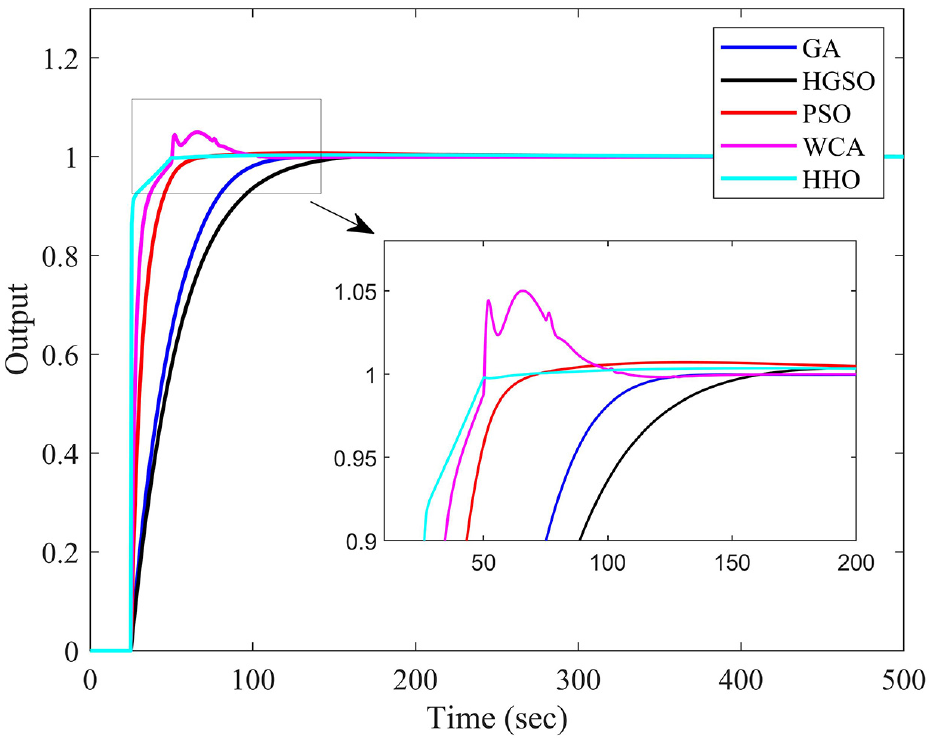
Step response of the system with
Comparison of optimization results with
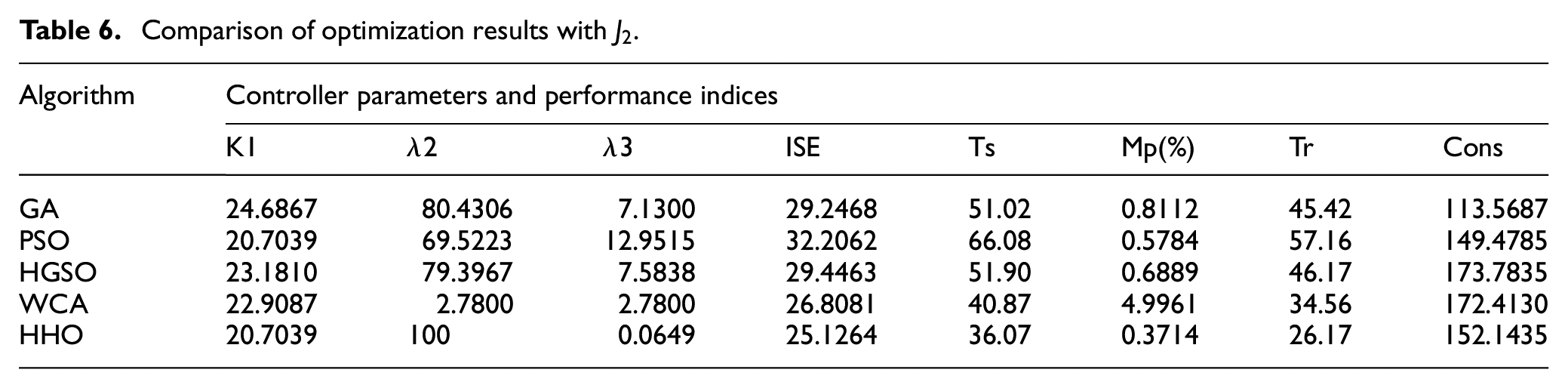
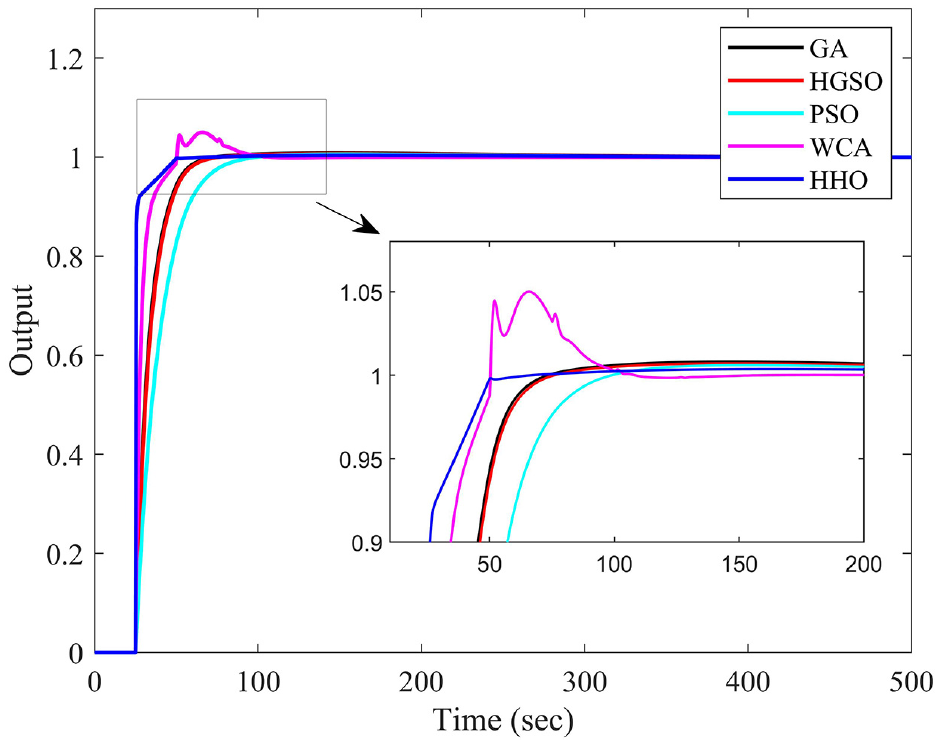
Step response of the system with
Comparison of optimization results with
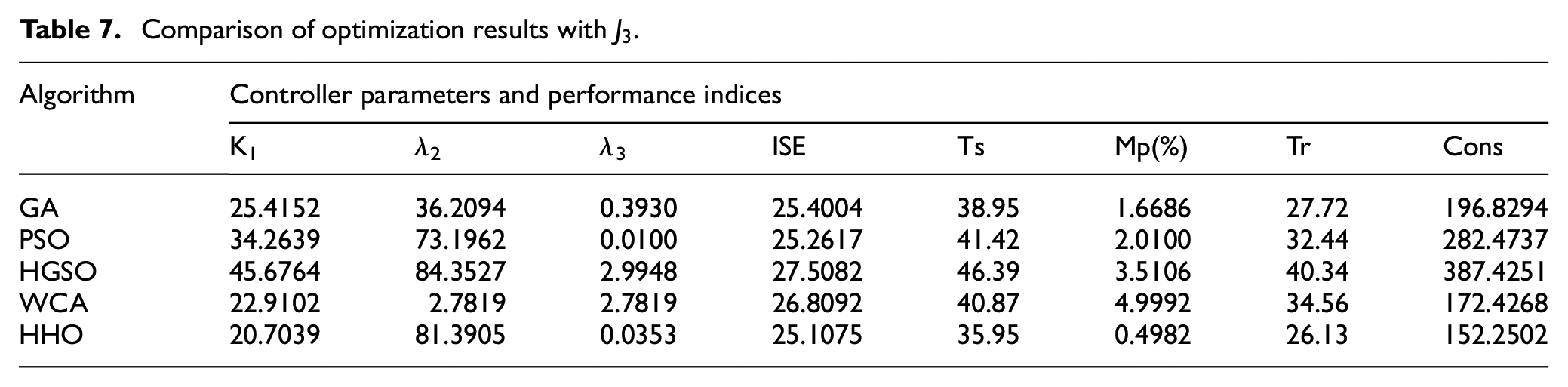
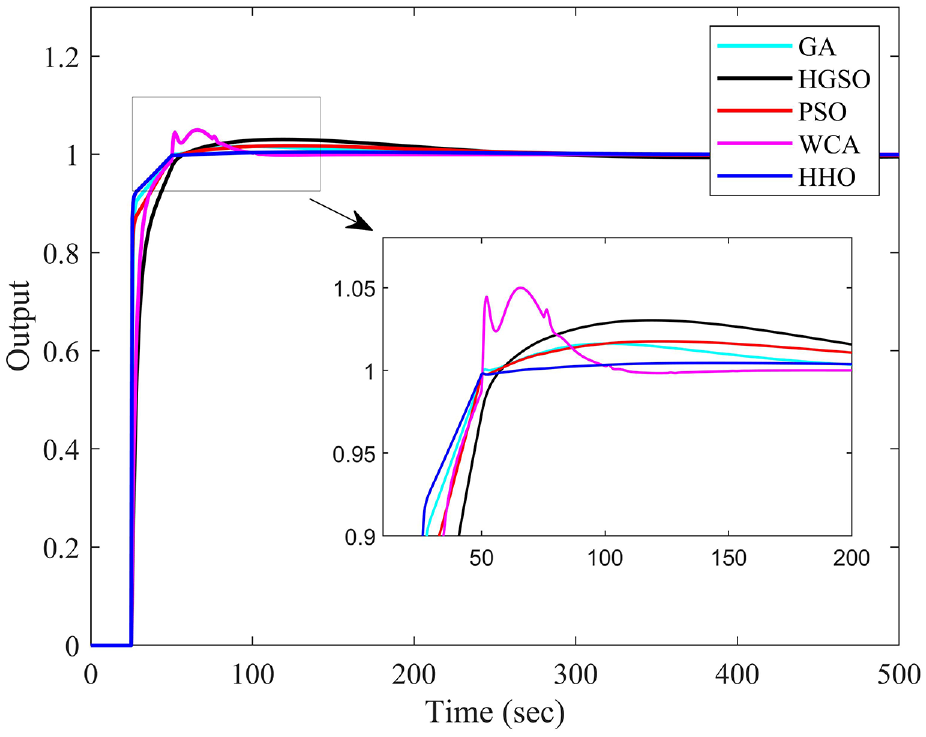
Step response of the system with
Comparison of optimization results with
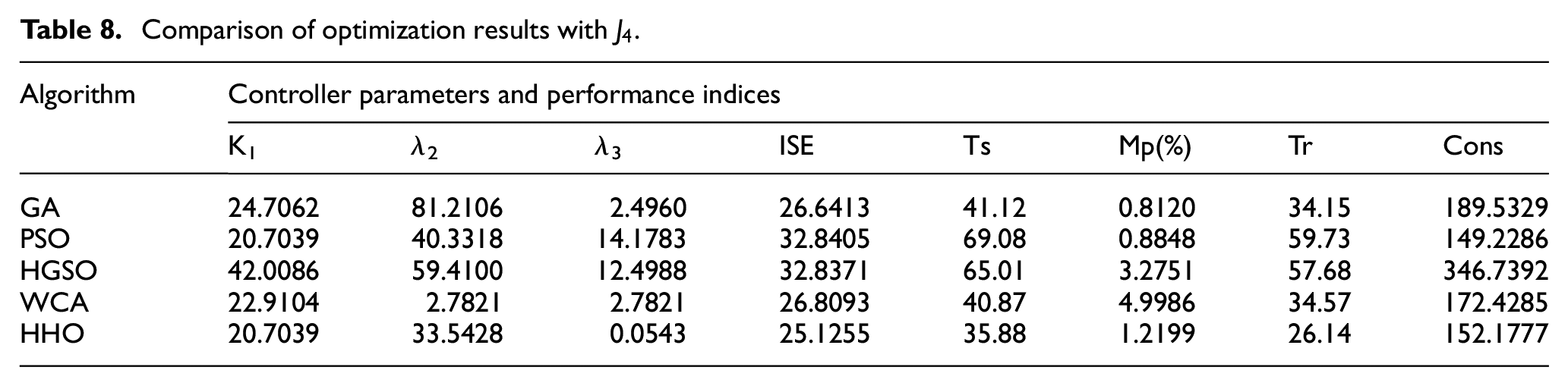
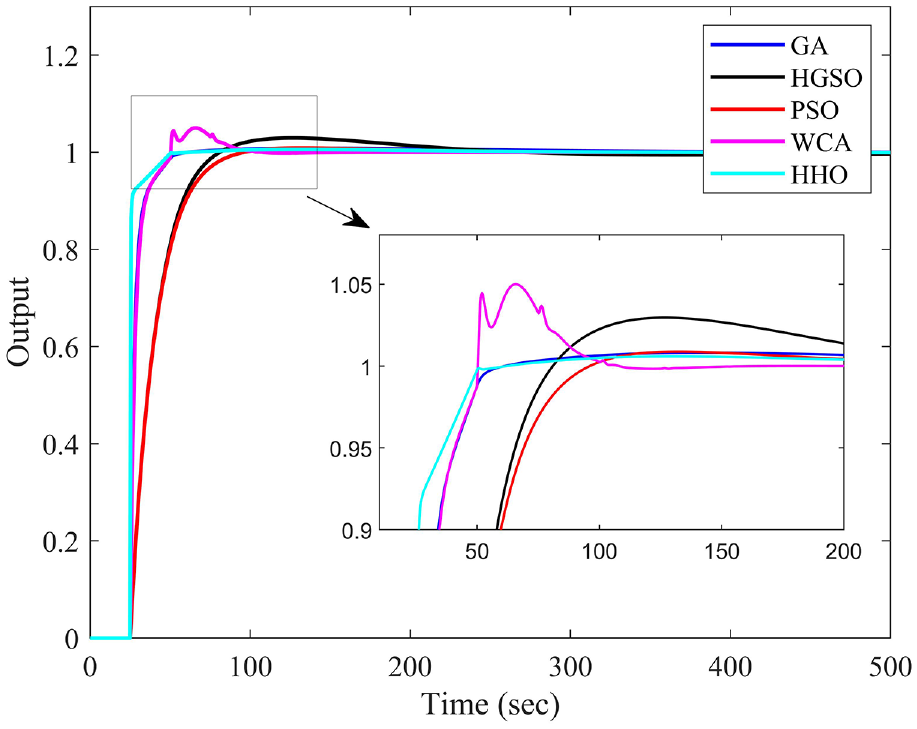
Step response of the system with
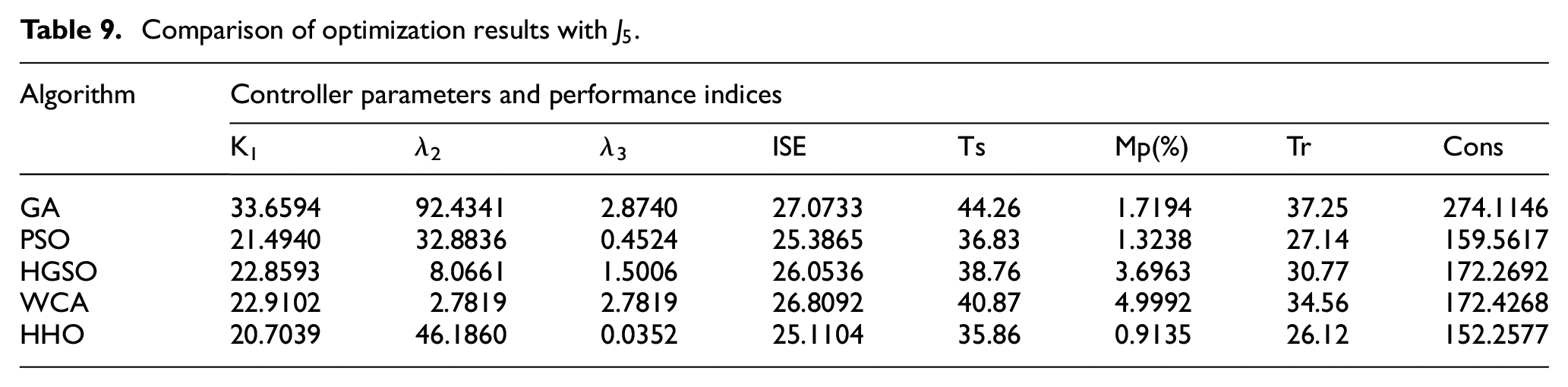
Comparison of optimization results with
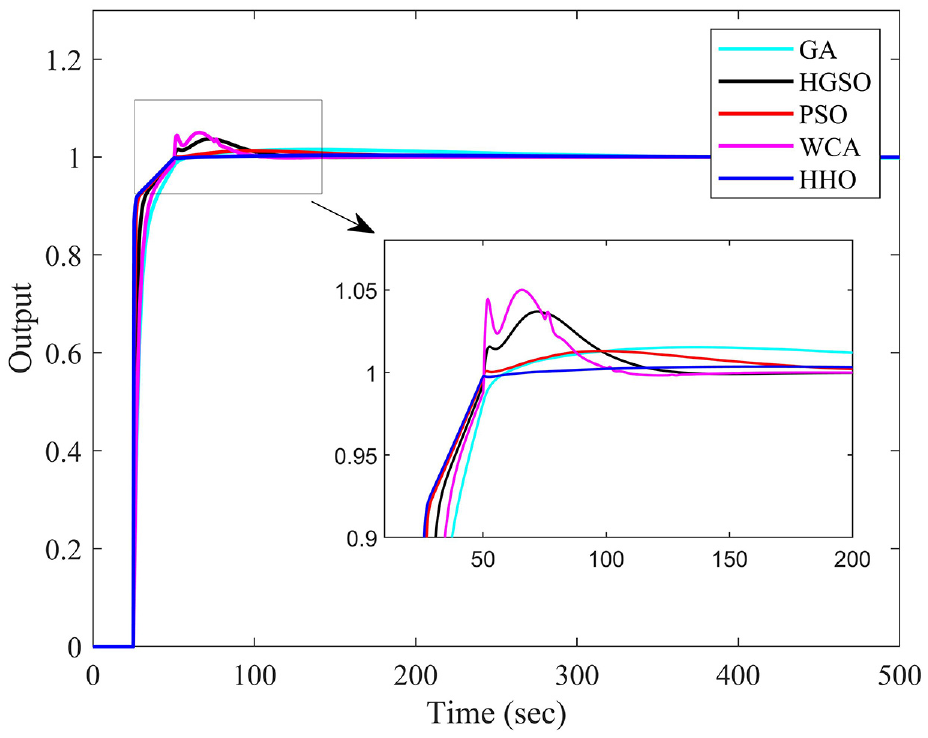
Step response of the system with
As shown in Tables 5–9, it can be clearly found that HHO algorithm has significant advantages in
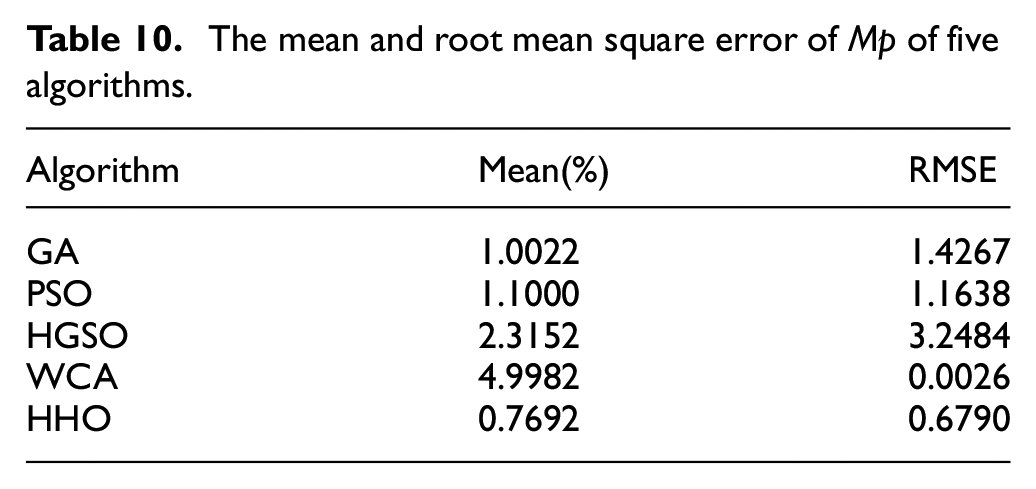
The mean and root mean square error of
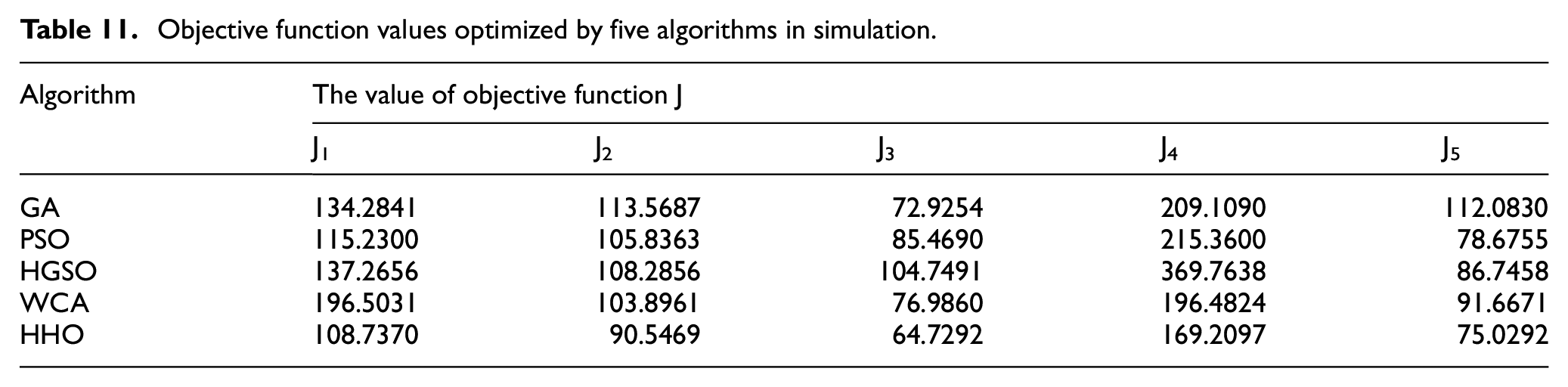
Objective function values optimized by five algorithms in simulation.
Simulation results for step input with disturbance
To test the disturbance rejection performance of the proposed method in this paper. Select
Set the simulation time to 1000 s, a unit step change in set point at time t = 0 and a disturbance
Set the simulation time to 1000 s, a unit step change in set point at time t = 0 and a disturbance
Comparison of optimization results with
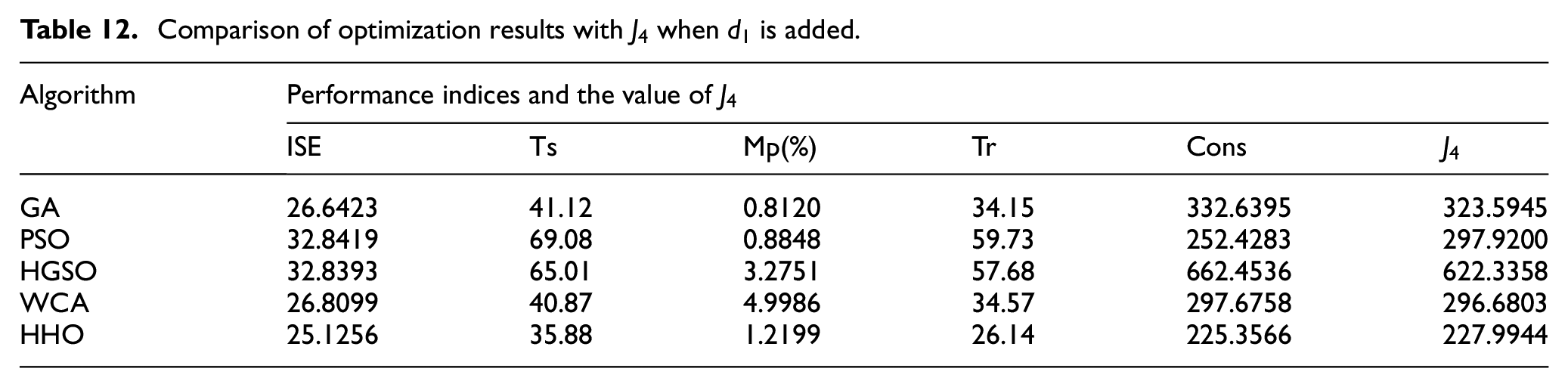
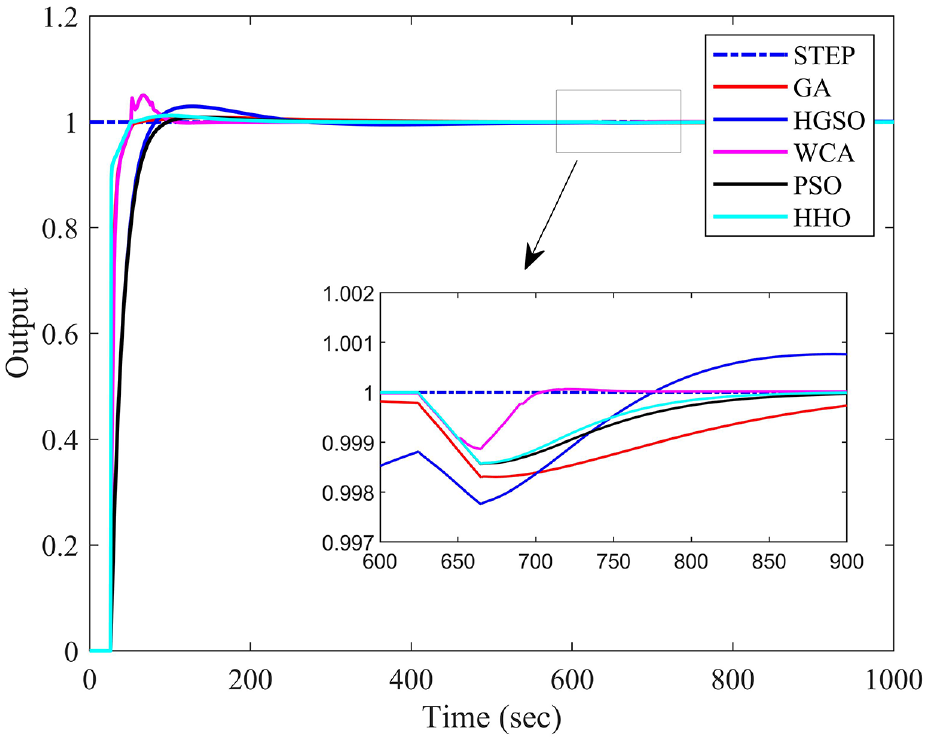
Step response of the system with
Comparison of optimization results with
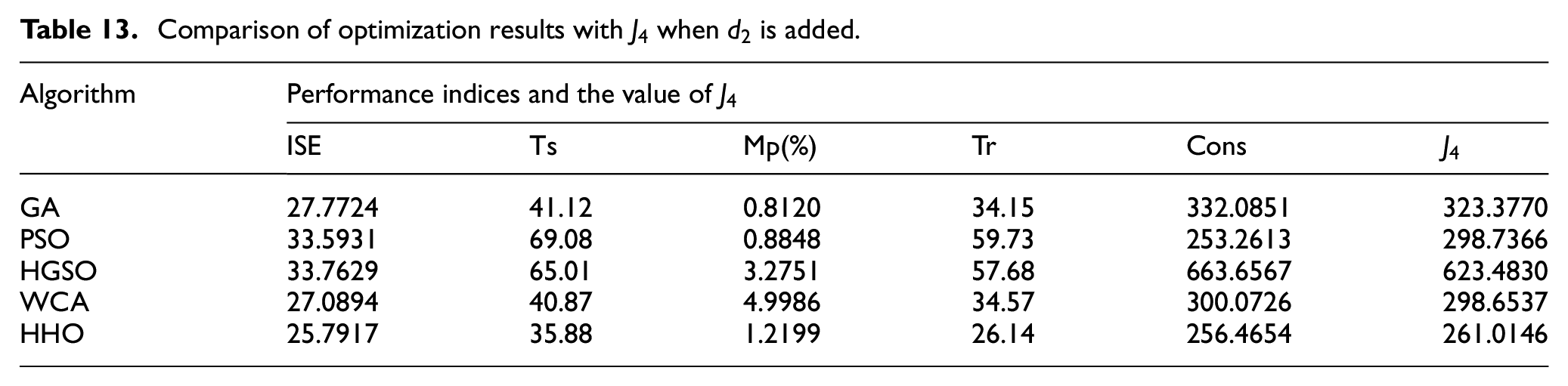
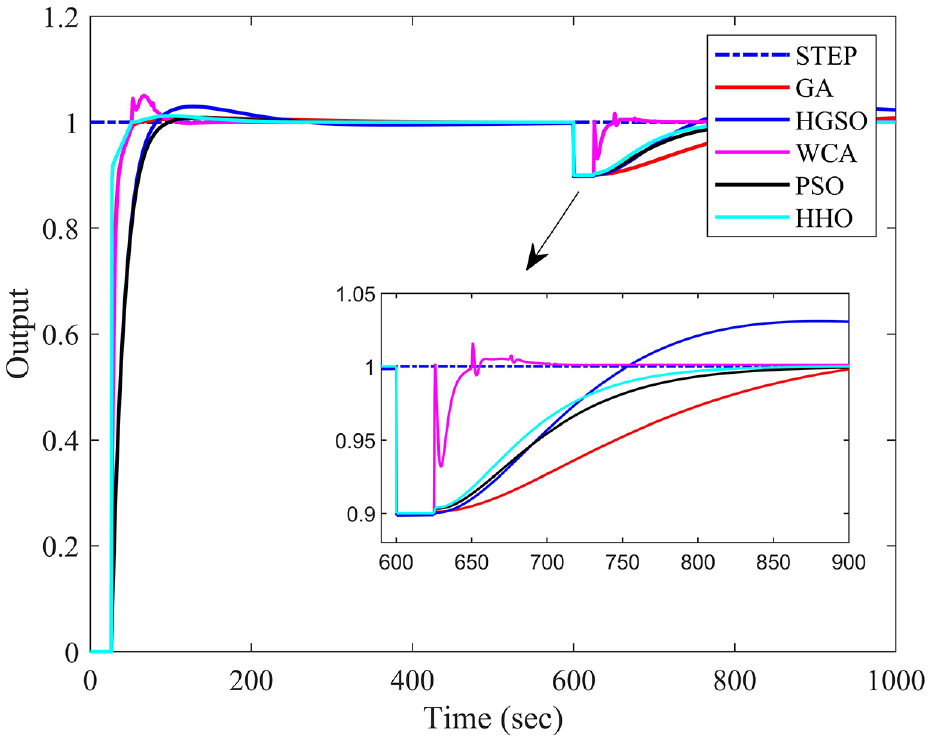
Step response of the system with
As is shown in Figures 12 and 13, when disturbance is introduced, the control system optimized by HHO still has better response characteristics than GA, HGSO and PSO. Although WCA has faster response than HHO, overshoot occurs in the response process. According to the values of the objective function
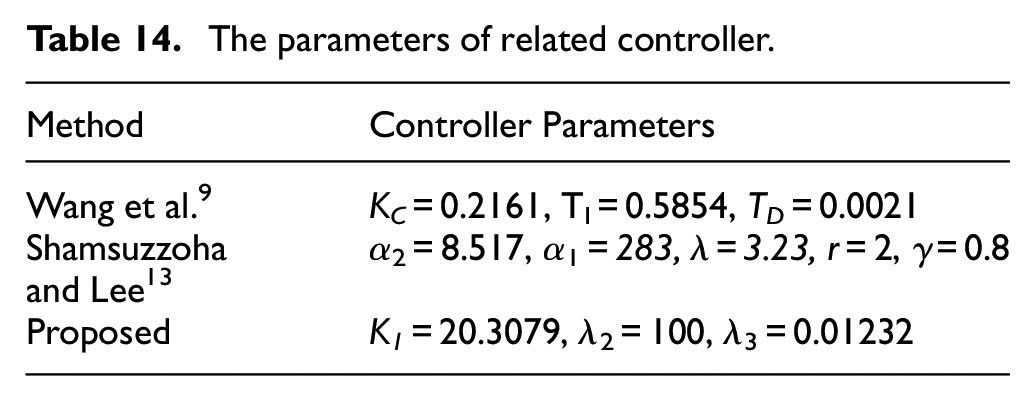
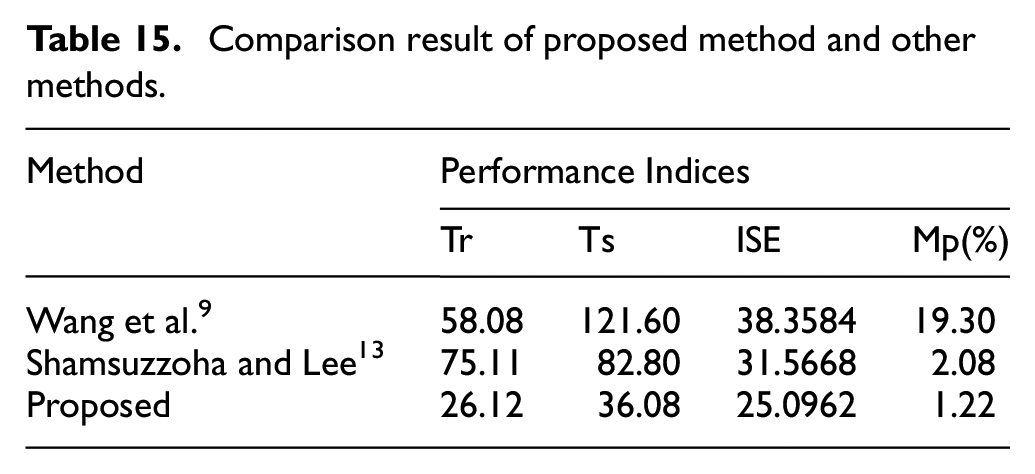
Compare the proposed method with other control methods
In this simulation case, we compare the proposed method with the other methods proposed by Wang et al. 9 and Shamsuzzoha and Lee. 13 A new objective function is designed as follow:
where,
The parameters of related controller.
Comparison result of proposed method and other methods.
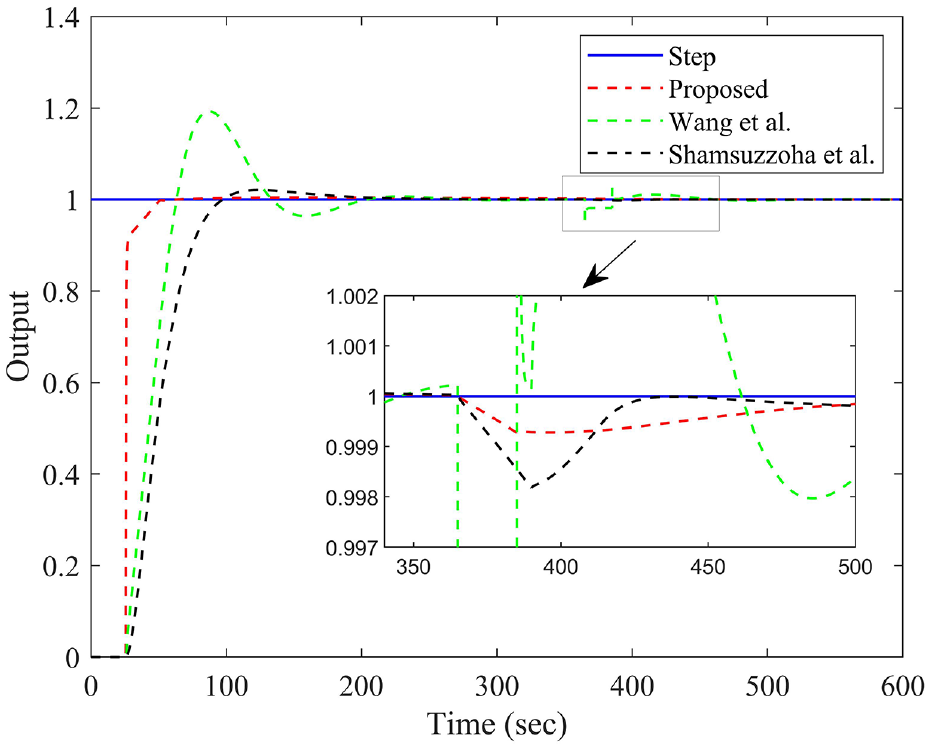
System responses of proposed method and other methods.
Conclusions
In this paper, a three degree of freedom IMC method based on HHO algorithm and identification model is proposed for WRRP. The dynamic model of WRRP is determined by least square identification and Routh approximation method. Based on the model, a three degree of freedom IMC structure is designed. In the improved structure, three controllers are intended for stabilizing the controlled object, set point tracking as well as disturbance rejection separately. The multi-objective optimization of controller parameters based on HHO algorithm is conducted so that the comprehensive performance of the control system can achieve desired results. In the simulation, the recently proposed control methods and other optimization algorithms are employed as the comparison. The simulation results demonstrate the effectiveness and better performance produced by the proposed method for WRRP. As a future recommendation, the accuracy of the process model is a key to achieve satisfactory performance, the time delay term is approximated by Taylor expansion in this paper. We will continue to explore other approaches to obtain accurate process model such as data driven and the more complex responses such as sine response will be considered.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key Research and Development Program of China under Grant No. 2018YFA0704605, the Scientific Research Funding Project of Liaoning Education Department of China under Grant No. JDL2020005, and the Fundamental Research Funds for the Central Universities of China under Grant No. DUT20JC11, DUT20LAB129.