
Abstract
Aiming at the obvious trend of the contours on the high-altitude geomagnetic map, this paper presents a method of high-altitude geomagnetic matching area selection combining geomagnetic information entropy and geomagnetic direction entropy based on the study of geomagnetic information entropy and geomagnetic direction entropy. The method first uses geomagnetic information entropy to select the region with rich geomagnetic information, and then determines the direction of the flight trajectory according to geomagnetic direction entropy to obtain the optimal matching trajectory. Finally, the method compares and analyzes the matching localization results of three flight trajectories in different directions on the geomagnetic map at an altitude of 30,000 m by using semi-physical simulation. The experimental results show that the flight navigation error along the trajectory with small information entropy is small, and its positioning error is 12.7% of the trajectory positioning error along the maximum information entropy direction. Selecting the flight trajectory according to the value of the geomagnetic direction entropy can greatly improve the precision and reliability of the geomagnetic matching localization. The method in this paper can provide a basis for path planning of the geomagnetic matching navigation.
Introduction
Due to the different terrain and composition at different locations, the geomagnetic field is locally anomalous, which forms a geomagnetic anomalous field.1–3 There is a definite correspondence between this anomalous field and the spatial location, which can be used for navigation and positioning. The geomagnetic matching navigation based on the anomalous field match is a passive and autonomous navigation method, and has good application prospects.4–7 The accuracy of geomagnetic maps and the amount of valuable information are important factors that affect the precision of geomagnetic matching navigation. The geomagnetic anomalous field has different characteristics at different positions, and the amount of information used for matching navigation is also different. Thus, it is necessary to select a suitable matching area before geomagnetic matching navigation.8–10 It’s also an effective basis for path planning. 11 Due to the difficulty in obtaining the high-altitude geomagnetic anomalous field, the research progress of high-altitude geomagnetic field matching navigation is slow. Fang et al. 12 studied and verified the method of extending the ground or low-altitude geomagnetic anomalous field to the high altitude. The magnitude and the fluctuation range of the geomagnetic value on the extended high-altitude geomagnetic map decrease, but the tendency of the change of the geomagnetic value on the whole geomagnetic map increases. Zhao et al. 13 and Xiao et al. 14 studied the geomagnetic matching direction selecting and the suitability evaluation method.
Zhang et al. 15 proposes a new comprehensive model combining principal component analysis (PCA) and analytic hierarchy process (AHP) to evaluate the suitability of navigation matching area. Li et al. 16 proposes an improved bionic algorithm with behavior constraints, which can make the AUV escape from the abnormal area when it loses its direction in the navigation stage. Wang et al. 17 uses the fuzzy similarity algorithm to select the matching area, and then uses the accurate correlation algorithm to obtain the best matching points, which reduces the influence of interference noise on the matching and positioning accuracy. In Wang, 18 PCA is used to select independent and principal component characteristic parameters for geomagnetic characteristic parameters. Secondly, GA-BP neural network model is constructed to establish the corresponding relationship between geomagnetic characteristic parameters and matching performance, which can select better adaptation areas and improve geomagnetic navigation and positioning accuracy.
Liu and Wang 19 suggests using a series of entropy methods to calculate the time series of geomagnetic field. De Santis et al. 20 introduced the concept of information entropy into the field of geomagnetic research and formed the basis of the concept of geomagnetic information entropy. Subsequent scholars applied geomagnetic information entropy to the selection of geomagnetic regions to be matched in a variety of environments such as low altitude, ground, indoor and underwater, and achieved good results. Sun et al. 9 used the geomagnetic information entropy index to construct an algorithm for selecting matching areas autonomously and conducting geomagnetic matching navigation, and the overall matching probability of this algorithm in the selected matching area is higher than 85%.
A new complexity measure for time series analysis is proposed in Li et al., 21 which is called reverse dispersion entropy (RDE). In Jiao et al., 22 combining the distance information of RDE and the local fluctuation information of FDE, a fluctuation based reverse dispersion entropy (FRDE) is proposed. FRDE also has many application prospects in other fields, and can also be applied to the research content of this paper. Tang et al. 23 proposes a new information entropy estimator to detect the change of magnetic noise in the differential signal obtained by a pair of magnetic sensors, which can be used to better detect geomagnetic.
In Li et al., 24 a geomagnetic matching aided navigation matching area suitability evaluation method based on spectral moment characteristics is proposed. The matching effects of the indicated path of inertial navigation system (INS) and the actual path in geomagnetic field contour map in different directions are compared, and it is concluded that there is good consistency between flight path and direction. Liu and Wang 19 combines the geomagnetic matching algorithm based on geomagnetic entropy and the geomagnetic matching algorithm based on Hausdorff distance for the coarse matching and fine matching process of geomagnetic matching respectively, overcomes the disadvantage that the geomagnetic matching algorithm based on geomagnetic entropy is easy to diverge and improves the navigation accuracy. In Song, 25 a new algorithm combining entropy algorithm and improved ICCP algorithm is proposed to realize coarse precision combined with multi-level matching, correct inertial navigation error to a certain extent, suppress the divergence of inertial navigation positioning error, improve the accuracy of the whole navigation, and realize the long-time operation of inertial navigation. Some researchers cited geomagnetic entropy and geomagnetic difference entropy as the reference criteria for the selection of geomagnetic assisted navigation area.7,26 Through the above literature investigation, when the geomagnetic entropy information in the matching area is small or the geomagnetic isoline change is not obvious, the matching probability and positioning accuracy will be affected. 6 Direction entropy can effectively describe the information distribution characteristics of directional characteristic fields, and can be used to improve the matching performance. 27
The directivity of geomagnetic matching causes different positioning errors when flying into the area to be matched in different directions. Therefore, studying the flight direction and trajectory of the aircraft in the geomagnetic field is a key issue that needs to be solved for the geomagnetic matching navigation at a high altitude.
Geomagnetic direction entropy can reflect the richness of the information or the degree of the change of the geomagnetic field corresponding to the trajectory along a certain direction at the entry position, and can assist the planning of the flight direction and trajectory. Based on the above research background and the analysis of the characteristics of the high-altitude geomagnetic map, this paper studies a matching area selection method of the high-altitude geomagnetic map by using geomagnetic information entropy and direction entropy.
Characteristics analysis of high-altitude geomagnetic map matching
At present, high-altitude geomagnetic anomalous field measuring faces great difficulties in engineering application. The high-altitude geomagnetic field is usually obtained by collecting ground or low-altitude geomagnetic anomalous field data and then by using potential field continuation. The characteristics of the high-altitude geomagnetic anomalous field are different from those of the ground or low-altitude geomagnetic anomalous field. Figure 1(a) to (f) shows the geomagnetic anomalous field measured on the ground in a certain area and the geomagnetic anomalous field data extended to different heights.
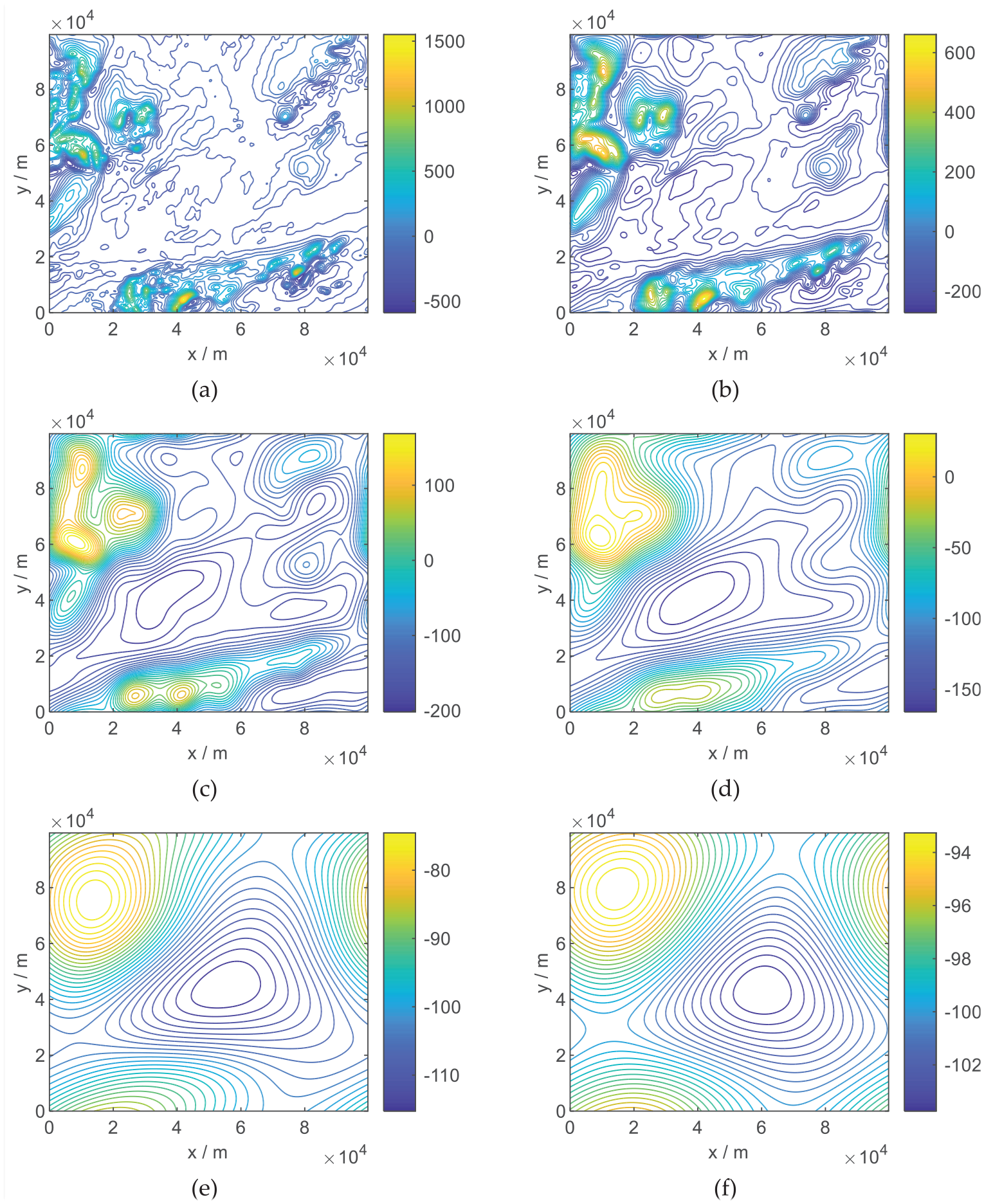
Maps of geomagnetic anomalies at different height: (a) ground, (b) 1000 m in height, (c) 5000 m in height, (d) 10,000 m in height, (e) 30,000 m in height, and (f) 50,000 m in height.
From Figure 1(a) and (b) compared with the low-altitude geomagnetic anomalous map, the intensity of the geomagnetic anomalous value decreases greatly with the increase of the height, and the change rule of its contour lines also tends to be smooth. A large number of local extremums of geomagnetic intensity appearing on the ground geomagnetic map disappear, while the general outline and overall trends of the edge contours are preserved. In order to show the change trend of the geomagnetic spatial position, a geomagnetic map at an altitude of 1000 m and a geomagnetic map of 30,000 m are used to draw a three-dimensional curved surface as shown in Figure 2.
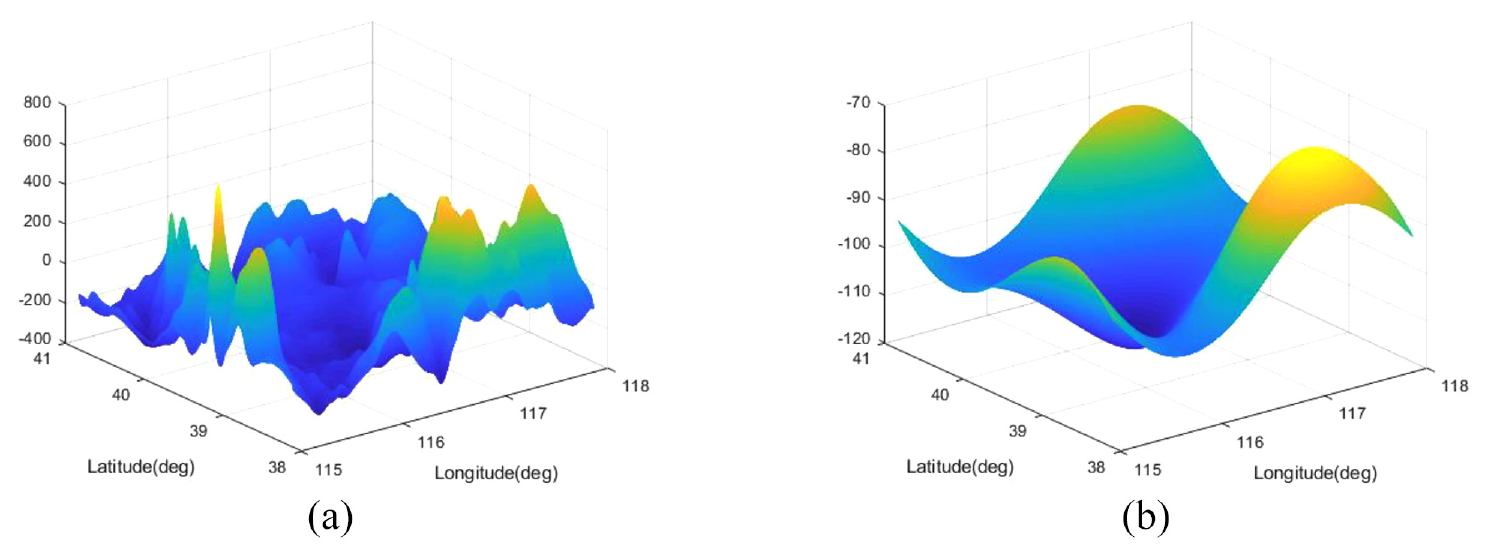
Comparison of 3-D geomagnetic anomalous maps at high altitude and low altitude: (a) 1000 m in height and (b) 30,000 m in height.
By comparing the two 3-D geomagnetic diagrams in Figure 2, it can be seen that the changes of the geomagnetic anomalous field at higher altitudes become smoother than those at lower altitudes. Therefore, the high-altitude geomagnetic matching algoristhm needs to adapt to the characteristics of high-altitude geomagnetic maps. The attenuation of the geomagnetic anomalous field means that the measurement accuracy of geomagnetic sensors is required to be higher than that of ground geomagnetic matching. However, the smooth and obvious trend change characteristics of the high-altitude geomagnetic field also put forward new requirements and problems to be solved for the geomagnetic matching method, that is, the flight direction and flight trajectory of the aircraft.
In the ground or low-altitude areas, the geomagnetic anomalous field is richer in information, stronger, more fluctuating, and more random, which makes the direction of the aircraft into the geomagnetic map has little effect on the performance of the matching localization. Geomagnetic matching in low-altitude areas generally avoids some peak extremes. However, the frequency of the high-altitude geomagnetic anomalous map is relatively small, and the fluctuation changes have a clear tendency related to geographical locations, which makes the angle between the heading of the flight trajectory and the contour change trend affect the matching performance. When the flight trajectory and the geomagnetic field contour are in a nearly parallel state, the matching performance is good, while in a nearly vertical state, the positioning error increases, and the matching probability is greatly reduced. Based on the above technical background, this paper proposes a method for selecting a geomagnetic matching area combining geomagnetic information entropy and geomagnetic direction entropy.
Geomagnetic information entropy and geomagnetic direction entropy
Geomagnetic information entropy
Entropy is a measure of uncertainty. The more random the signal source is, the greater its entropy is. The digital geomagnetic map in the geomagnetic matching navigation is 2-D grid data, and the geomagnetic value in the grid can be regarded as a two-dimensional random variable sample. The amount of information contained in these random variable samples can also be measured by entropy. We call the entropy of geomagnetic grid data the geomagnetic information entropy.
Supposed that the 2-D geomagnetic grid data is a matrix of

In equation (1),
Geomagnetic direction entropy
The geomagnetic map blocks are scanned in different directions
In order to calculate the geomagnetic direction entropy of the entry point j along the direction

The difference between equation (2) and equation (1) of geomagnetic information entropy is that
Selection method of geomagnetic matching area based on geomagnetic information entropy and geomagnetic direction entropy
The geomagnetic information entropy index reflects the overall change characteristics of the geomagnetic field in the matching area, not local characteristics, that is, it cannot reflect a local change characteristic of the geomagnetic field or a change characteristic of the geomagnetic field in a certain position and direction. From the analysis in section 2, it can be seen that the contours of high-altitude geomagnetic maps have an obvious directivity and trend, which has an impact on the results of geomagnetic matching localization. Geomagnetic information entropy cannot be used as the sole basis for judging the quality of matching. And the geomagnetic direction entropy can reflect the performance of the geomagnetic matching localization when the aircraft enters the geomagnetic matching area in different positions and directions. Therefore, aiming at the characteristics of the high-altitude geomagnetic map, combining with the characteristics of geomagnetic information entropy and geomagnetic direction entropy, this paper proposes a second-level geomagnetic matching area selection method based on geomagnetic information entropy and geomagnetic direction entropy. That is, firstly, the optimal geomagnetic matching area is selected according to the geomagnetic information entropy index, and then the heading and entry point are selected according to the geomagnetic direction entropy. Finally, the optimal geomagnetic area and the optimal heading and entry position are obtained, which lays a foundation for high-precision geomagnetic matching. The technical solution flowchart is shown in Figure 3.
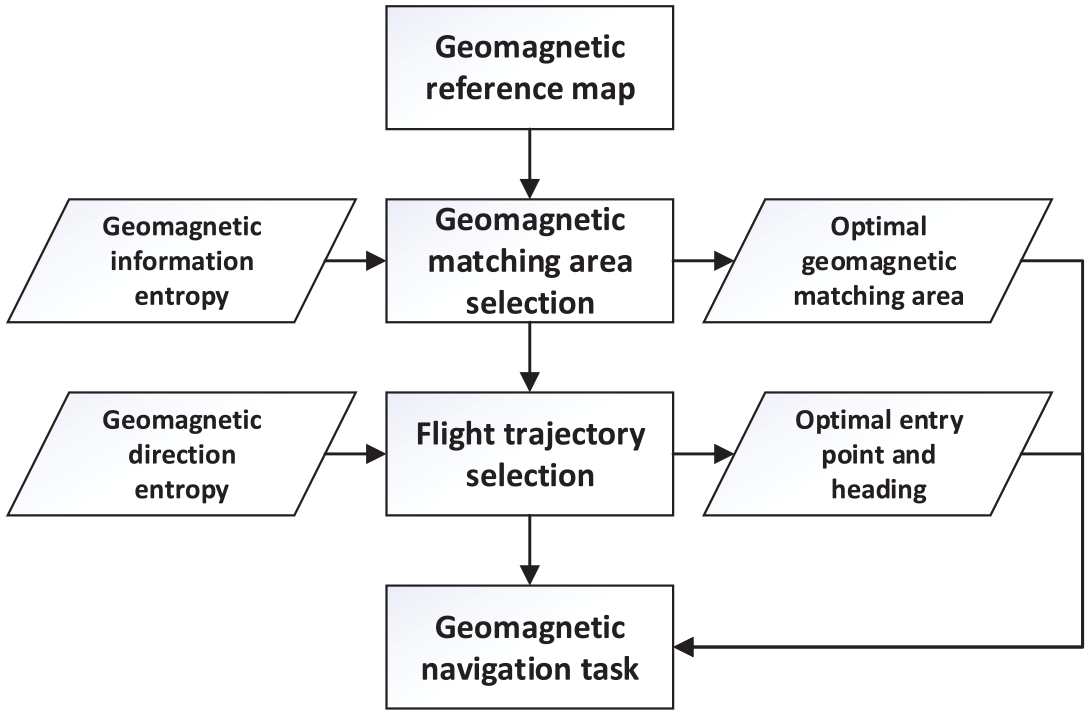
Geomagnetic navigation task flow chart.
The method in this paper can not only select the matching region with rich information changes to improve the matching accuracy, but also make full use of the characteristics of the high-altitude geomagnetic map with change trends to improve the matching precision.
Experiment and analysis
Experiment program
In order to verify the effectiveness of the proposed method in this paper, the 30,000 m high-altitude geomagnetic map data shown in Figures 1(e) and 2(b) in Section 1 is processed, the geomagnetic information entropy is used to select the geomagnetic matching area, and the geomagnetic direction entropy is used to select the fly-in direction and position. Then enter the matching area in different directions at the selected geomagnetic matching area, compare and analyze the geomagnetic positioning errors generated in different flight directions, and indirectly verify the influence of the flight direction on the precision of geomagnetic matching at high altitude through the comparison results.
Experiment results and analysis
Preliminary selection of geomagnetic matching areas
Extend the actual measured geomagnetic map with an actual size of
Geomagnetic information entropy of 25 blocks.
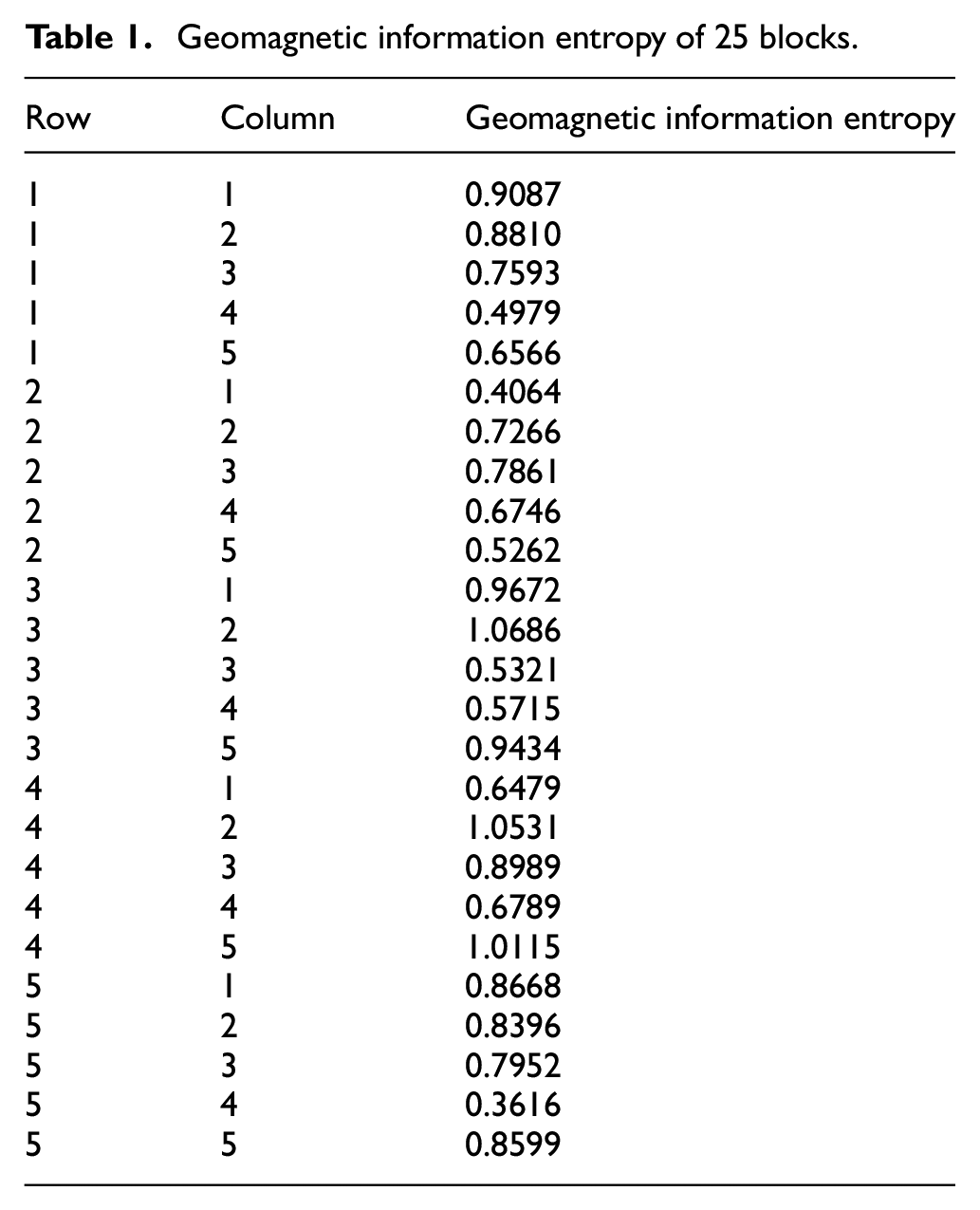
In the Table 1, the largest geomagnetic information entropy is 1.0686, the geomagnetic block corresponding to this value is shown in Figure 4.
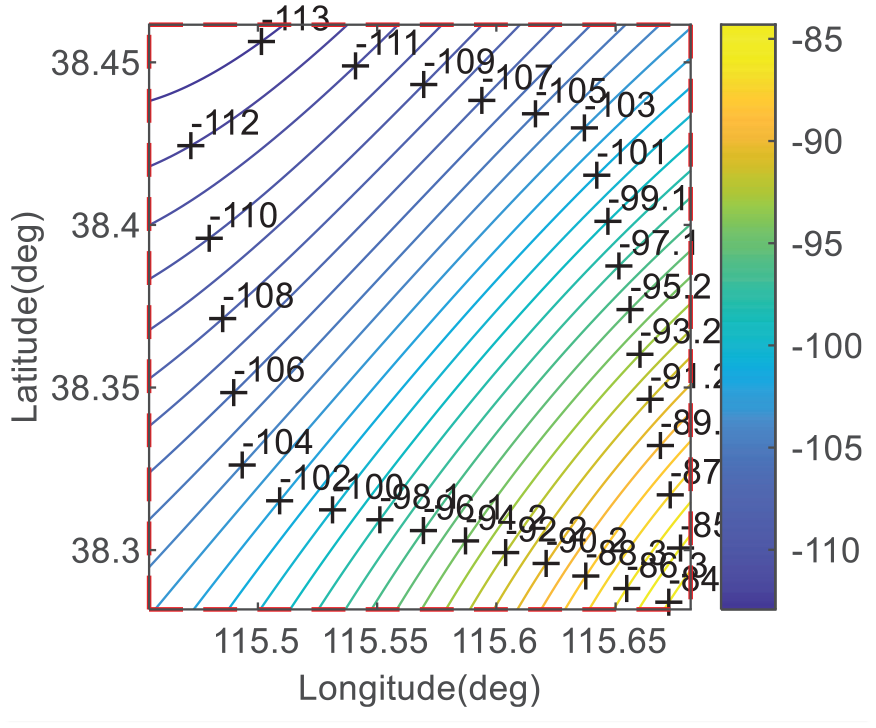
Geomagnetic block with the largest geomagnetic information entropy.
It can be seen from the Figure 4 that the contours of the selected geomagnetic map show an obvious trend, which is consistent with the characteristics of the high-altitude geomagnetic map described in Section 2. Therefore, using the geomagnetic direction entropy to select a suitable flight direction can improve the geomagnetic matching precision.
Analysis of the effect of flight direction on positioning errors
The geomagnetic matching method is affected by the geomagnetic map and track. Especially when the tracks and the contours of the geomagnetic map are close to a right angle, the probability of geomagnetic mismatch increases. In order to quantitatively analyze the effect of flight direction on the positioning error, three sets of semi-physical simulation experiments were performed in this paper.
The semi-physical simulation experiment scheme is: (1) Extend the measured ground geomagnetic map (shown in Figure 1(a)) to the altitude of 30,000 m, select the geomagnetic block with the largest geomagnetic information entropy as the geomagnetic matching area (completed in Section 5.2.1); (2) Based on the selected geomagnetic map, the trajectory generator is used to generate three simulated aircraft tracks with different angles between the geomagnetic contours and the aircraft tracks, which is used to compare the matching performance of different tracks; (3) Set the initial navigation parameters and device errors to simulate the errors of the inertial navigation system; (4) The aircraft flies through the matching area along these three tracks and performs the matching localization; (5) Analyze the results of the matching localization.
Navigation parameters and track settings
Set the entry of the three tracks in the geomagnetic matching area at (38.39°N, 115.45°E), the aircraft speed is 3400 m/s. The direction of the contour of the geomagnetic map in Figure 4 is close to 45° north-east. Thus, the initial angles between the flight direction of the three tracks after entering at the entry point and the geomagnetic contour are set as:
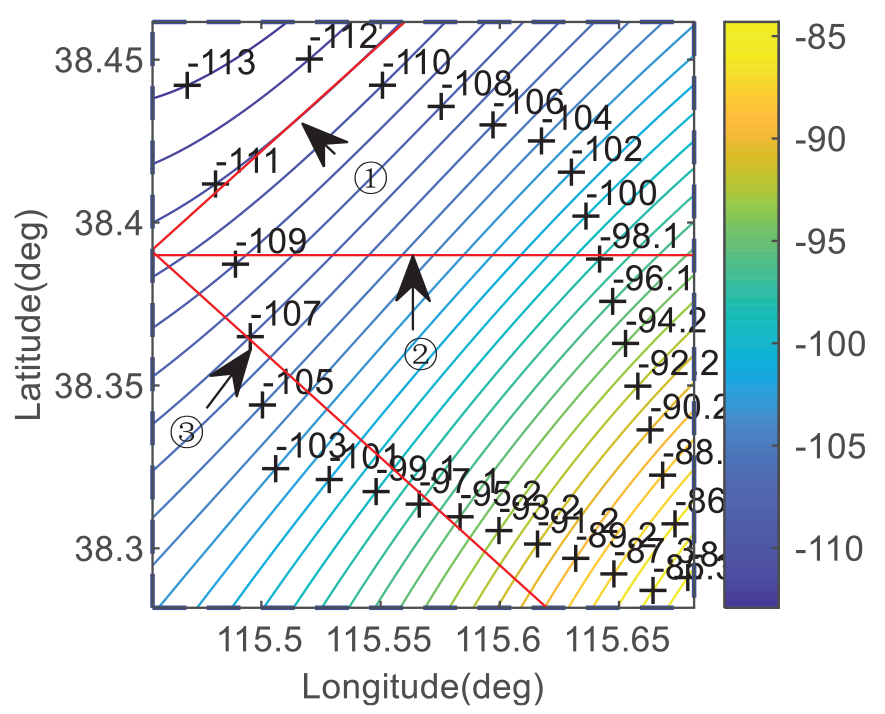
The three tracks with different heading.
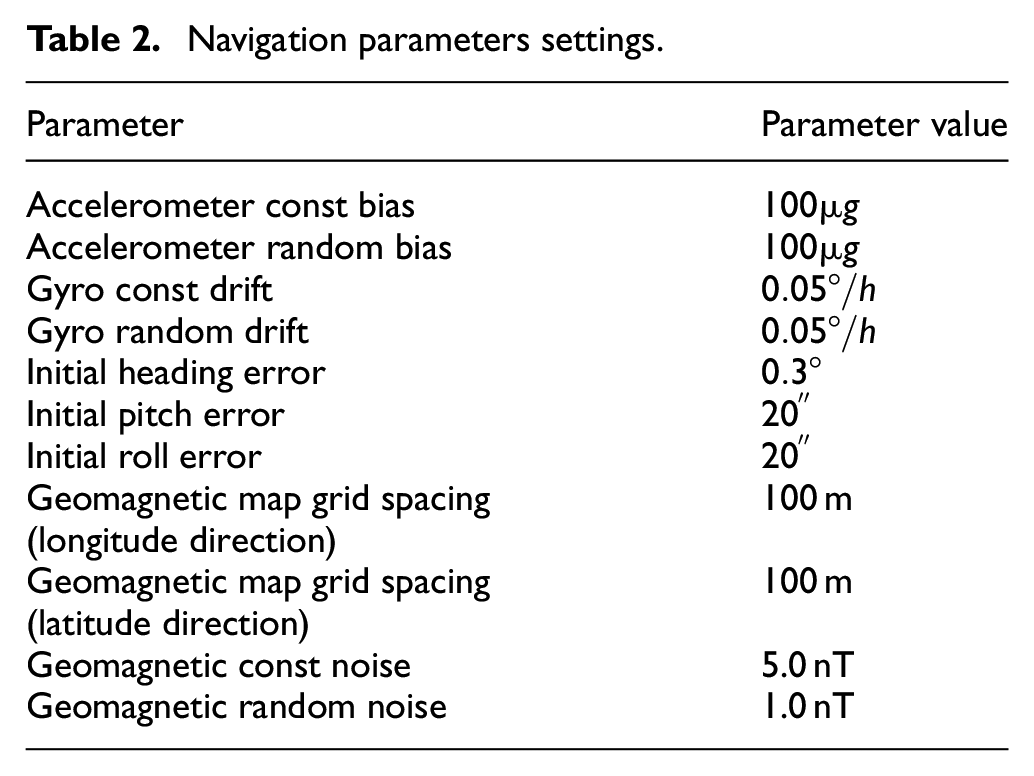
Corresponding to the three tracks, the initial errors, inertial device errors, and geomagnetic errors of the set inertial navigation system are shown in Table 2.
Navigation parameters settings.
Analysis of simulation results
The geomagnetic direction entropy of the three tracks shown in Figure 5 is: 0.4307 (Track 1), 0.9843 (Track 2), 1.1262 (Track 3). The aircraft flies along the above three tracks, and the results of the matching localization during the flight are shown in Figure 6(a) to (f).
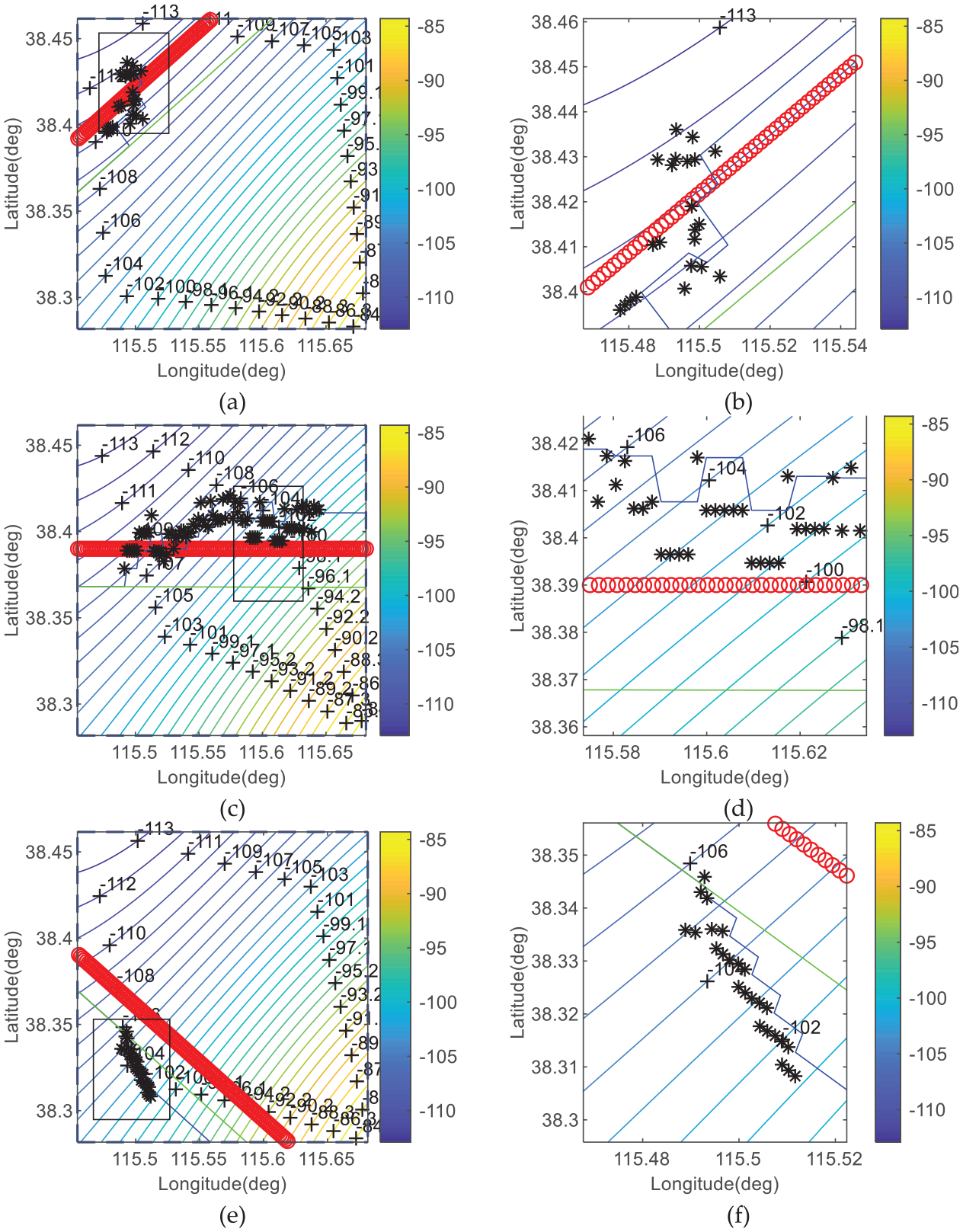
Geomagnetic navigation and positioning results of the aircraft flying along three tracks: (a) navigation results of Track 1, (b) zoomed-in area at the black rectangle part of Figure (a), (c) navigation results of Track 2, (d) zoomed-in area at the black rectangle part of Figure (c), (e) navigation results of Track 2, and (f) zoomed-in area at the black rectangle part of Figure (e).
Figure 6(a), (c), and (e) show the tracks in the matching area. Figure 6(b), (d), and (f) show zoomed-in area of the short tracks at the black rectangle part corresponding to the three figures on the left. In Figure 6, the red circles represent the true track of the aircraft. The green solid lines represent the output position of the inertial navigation system. The black star dots represent the positioning results of the geomagnetic matching. And the blue solid lines represent the output track of the inertial navigation system after being corrected by geomagnetic matching algorithm.
It can be seen from the Figure 6 that Track 1 matches well. The positioning results basically overlap with the true track, and the positioning error is 530.19 m (1σ). The positioning results of Track 2 are close to the true track. But the positioning error is large and it is 2051.11 m (1σ). The results of the geomagnetic matching localization of Track 3 gradually deviate from the true track and show a trend of divergence. The positioning error reaches 4162.34 m (1σ) in simulation.
It can be seen from the data processing results of trajectory ①, trajectory ②, and trajectory ③ that when the trajectory is nearly parallel to the equipotential line (trajectory ①), the matching positioning error is small, and the matching positioning error increases with the increase of the angle between the motion trajectory and the equipotential line (trajectory ②), and the reliability of the matching result is very poor in the near vertical state (trajectory ③). The positioning errors in the near parallel state are 25.8% and 12.7% of the positioning errors of trajectory ② and trajectory ③, respectively.
It shows that using the geomagnetic directional entropy to select the flight direction has an important role and effect in improving the precision of the geomagnetic matching localization.
Conclusions
Aiming at the trend of the contours and the decline of global randomness on the high-altitude geomagnetic map, this paper combines the two quantified indicators of the geomagnetic information entropy and the geomagnetic direction entropy to study the selection method of the geomagnetic matching area and the flight direction at a high altitude. The research results show that the proposed method can achieve better results of the matching localization. The method in this paper can provide an important basis for path planning of long-range geomagnetic matching navigation, which is of great significance.
Footnotes
Author contributions
Y.H. contributed to established the research background of this paper, and contributed in simulation program writing and analysis of simulation results. Y.H. and R.L. contributed in the methodology, R.L. contribute in writing and editing this paper. All authors have read and agreed to the published version of the paper.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work described in this paper was supported by National Natural Science Foundation of China under Grant (61473019), Natural Science Foundation of Beijing Municipality (4172036), and the Domain Foundation of Equipment Advance Research of 13th Five-year Plan (41417030103).