
Abstract
Considering the stiffness characteristics of piezoelectric layer, the bending stiffness of piezoelectric cantilever beam is obtained by applying the first-order shear deformation theory. The finite element model of piezoelectric cantilever beam is established by Hamilton variation principle, and the modal superposition method is employed to reduce the order of the finite element model. At the maximum strain point, the sensors/actuators are equipped in pairs. Based on the uncertain dynamic model of piezoelectric cantilever beam, the independent modal space control method based on LQR (linear quadratic regulator) control is employed for the active control of the smart beam structure, and the weighted matrices Q and R are selected according to the energy criterion. The numerical simulations and experiments verify the effectiveness of the proposed finite element model and the active vibration optimal control.
Keywords
Introduction
Piezoelectric smart materials and structures are being more and more used in aerospace, shipbuilding, and automobile manufacturing and other fields owing to their light weight, low cost, high-specific strength and stiffness, excellent thermal characteristics, ease of manufacture and other significant features. 1,2 Accurate prediction of the dynamic behavior and active vibration control of piezoelectric cantilever beam are vital to the engineering design and manufacture of piezoelectric cantilever beam. In recent years, several researches have focused on the vibration analysis and control of these structures. Piezoelectric smart structures, particularly piezoelectric cantilever beams, are among the most commonly used flexible members in aerospace structures and aircrafts. Consequently, extensive research has been conducted on vibration control of flexible beams. One of the most interesting and feasible active control configurations in this field includes the implementation of the excellent sensing and actuating properties exhibited by piezoelectric materials. 3
For the modeling of piezoelectric cantilever beam, the change of stiffness and mass caused by sticking piezoelectric material or embedding piezoelectric material is usually ignored, and a distributed moment is used to express the control effect of piezoelectric layer on the structure, 4–7 which can not accurately reflect the intrinsic mechanical characteristics of the piezoelectric smart structure. The finite element model of piezoelectric structure usually has a high order, which can not be directly used in the design of controller. Model reduction is the link between the finite element model and controller design. Moreover, in the following research works , 8–11 in order to avoid the electromechanical coupling effect, some assumptions are adopted. The constitutive equation of piezoelectric body is directly decoupled by the electrical mechanical quantity, which makes the problem greatly simplified but does not conform to the actual situation. 12–14 In this work, applying the first-order transverse shear deformation theory of laminated beams, the equivalent transverse bending stiffness of piezoelectric cantilever beams is obtained. The finite element model of piezoelectric cantilever beams is established by Hamilton variational principle. Modal superposition method is used to reduce the order of the original system. Therefore, based on this reduced order mathematical model, a state feedback controller is designed to make the active vibration control of piezoelectric cantilever beams possible.
The main control algorithms used in the active vibration control of piezoelectric cantilever beam are as follows: PD control based on optimal position feedback, 15 robust control, 16,17 adaptive control, 18–29 fuzzy control, 30 artificial neural network control, 31 LQR control method 32–38 etc. The purpose of control is to quickly suppress bending and torsional modal vibration. It can be seen from the existing research 15–40 that the large amplitude vibration of the flexible cantilever beam can be rapidly attenuated to a small amplitude value, but the small amplitude vibration will last for a long time. In order to ensure the rapid attenuation of large and small amplitude vibration of the flexible beam with uncertainties, the sliding mode control algorithms 39–41 are proposed.
Among these control methods, the research of LQR control method is mostly focused on piezoelectric intelligent materials, and different physical quantities are used as control objectives. The selection of weighting matrix Q and R is crucial to the control effect of the controlled closed-loop system. In, 32 the LQR method is used to study the vibration control of simply supported laminated plates on four sides, Q and R are only determined by experience. In, 33 the weight matrix Q and R are determined by the criterion of minimum energy. In, 34–36 the LQR controller is proposed to use a lightweight mirror flexible system, and the two weighting factors Q and R on the control performance are also investigated. In, 37 the LQR state feedback control is designed for the flexible shell structronic systems, and the gain matrix is estimated based on minimizing a performance criterion function. However, in LQR algorithm, it has rarely been reported that all kinds of boundary conditions are taken into account and a clear basis is given for the determination of the weight matrix Q and R. 38
The main contribution of the paper is the dynamic modeling and vibration control method of piezoelectric the cantilevered beam. Specifically, considering the stiffness characteristics of piezoelectric layer, the equivalent transverse bending stiffness of piezoelectric laminated beams is derived from the first-order transverse shear deformation theory of laminated beams. The finite element model of piezoelectric laminated beams is established by Hamilton variation principle, and the original system is reduced by mode superposition method. Futhermore, considering the uncertainty of system parameters, the vibration control of piezoelectric cantilever beams is carried out by using the independent modal space control method based on LQR. Different from the traditional LQR method, the weighted matrices Q and R of the LQR method designed in this paper are selected according to the energy criterion.
This paper is organized as follows. In Mathematical modeling, we present the mathematical modeling of cantilever beams with piezoelectric layer. In Design of active vibration controller, the LQR optimal vibration controller is designed for piezoelectric cantilever beams. Simulation and experiment results are discussed in Simulations and experiments. Finally, Conclusion gives some conclusions.
Mathematical modeling
Transverse bending rigidity for piezoelectric laminate beam
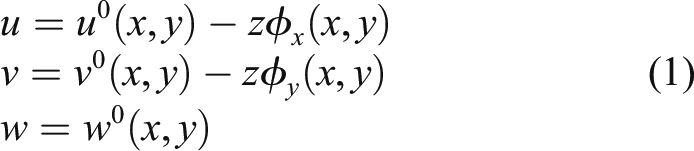
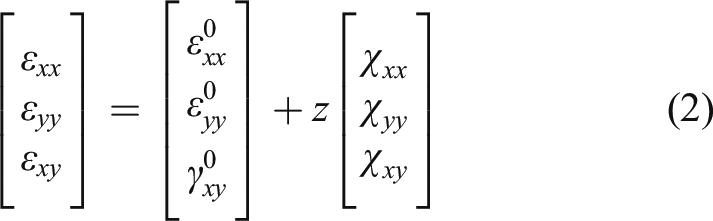
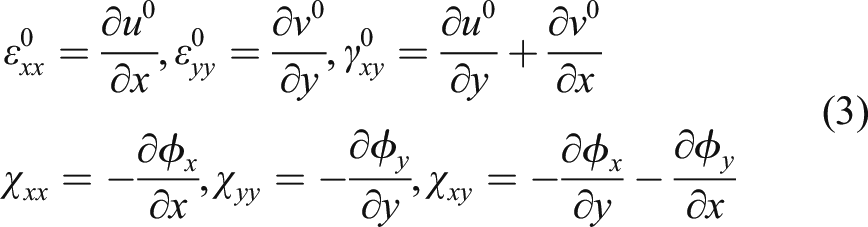
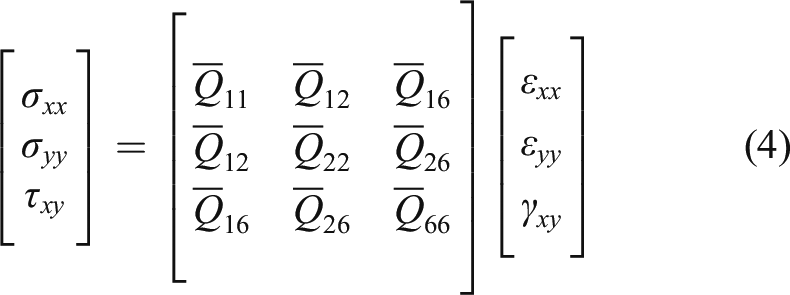
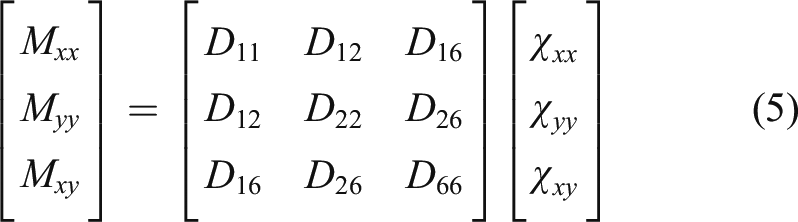
The thickness and width of the symmetrical piezoelectric laminated beams with sensors/actuators are h and b, according to the first-order transverse shear deformation theory of the laminated beam, the displacement of any point outside the middle plane of beam is as follows
3
:



Element equation of piezoelectric laminated beam
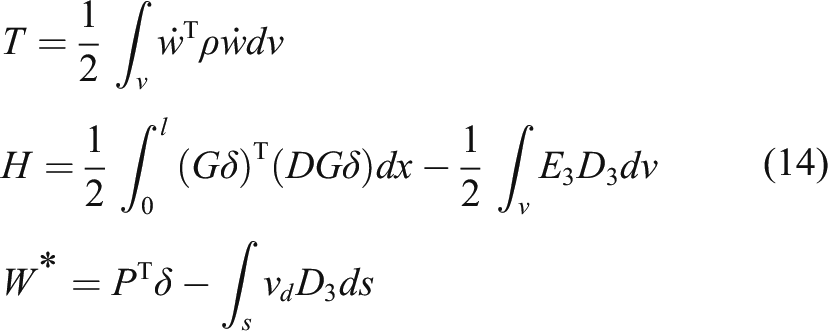
The piezoelectric equation reflecting the electromechanical coupling characteristics of piezoelectric materials can be derived strictly from the thermodynamic theory.
7

The beam element with piezoelectric layer is shown in Figure 1, with length l, width b, thickness of base material h, thickness of piezoelectric layer c, and input voltage Unit of piezoelectric laminated beam.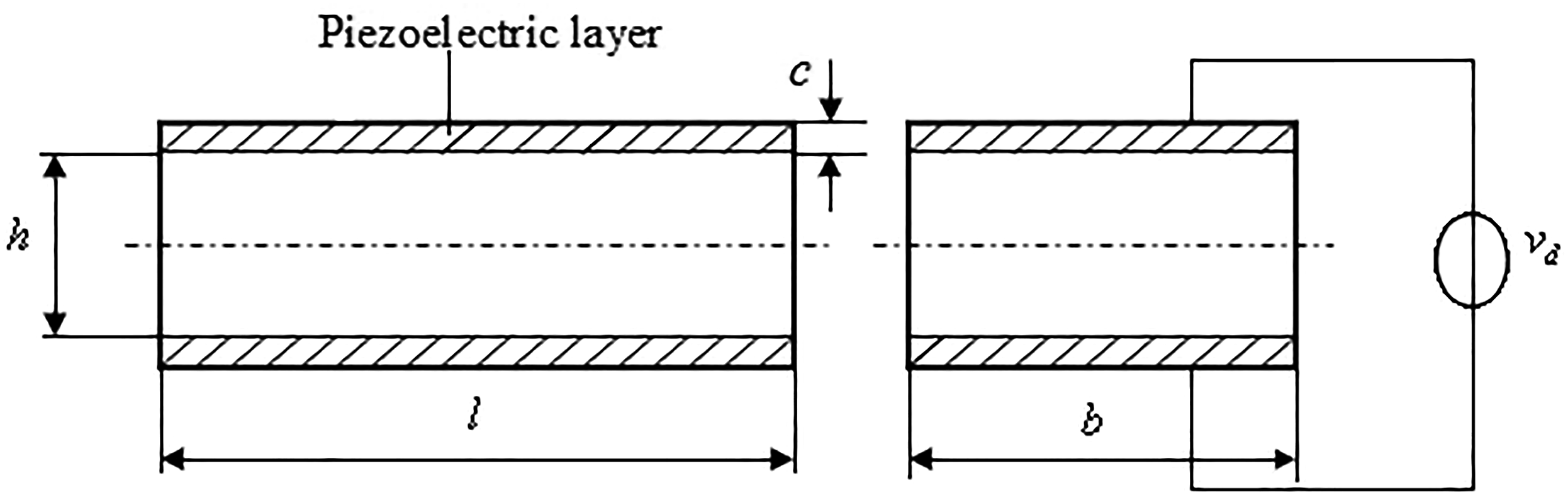




Position optimization of piezoelectric actuator
An important problem in active vibration control of flexible structures is how to determine the position of sensors and actuators to achieve the best sensing effect and control effect. It is generally believed that the vibration energy of flexible structure is mainly concentrated in the low frequency range, and the purpose of vibration suppression can be achieved as long as the vibration energy of previous vibration modes is consumed.
6
Both the piezoelectric sensors and actuators act through the electromechanical coupling effect. According to,
6
the best paste position of piezoelectric chip is located at the position with the largest strain of piezoelectric laminated beam.

Combination of system finite element equations
In Figure 2, a right-hand coordinate system is established at the fixed end of the cantilever beam, which includes a base part and a piezoelectric sensor/actuator part. According to (16), several piezoelectric sensors and actuators are arranged in pair into corresponding positions. The cantilever beam is divided into n elements, some of which are beam elements with piezoelectric layer, the others are ordinary beam elements. Division of n elements for the cantilever beam.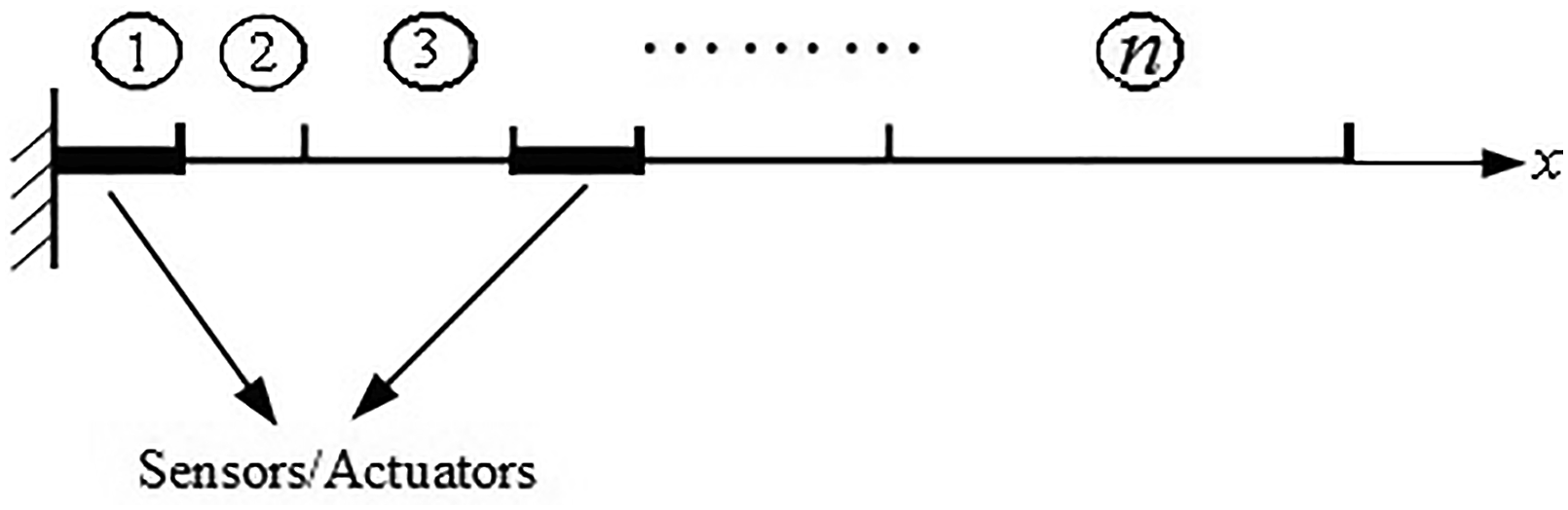
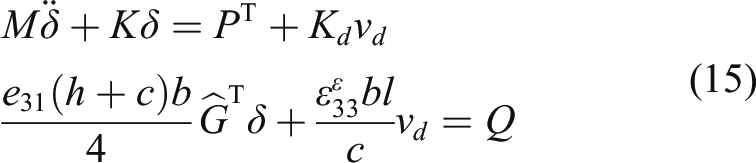
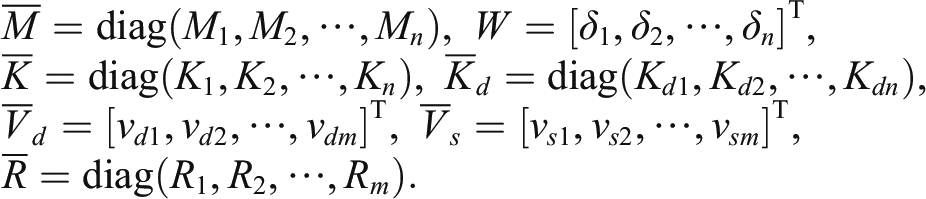
According to equation (15), the dynamic equation of piezoelectric laminated beam element is obtained, which is combined with other ordinary beam elements without piezoelectric layer. After dealing with the boundary conditions, the finite element equation of the system is obtained as

Design of active vibration controller
In order to facilitate the design of the controller by using the linear quadratic optimal control theory, equation (17) is written in the form of state space as following

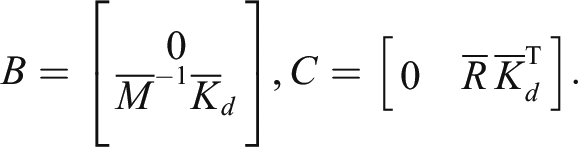





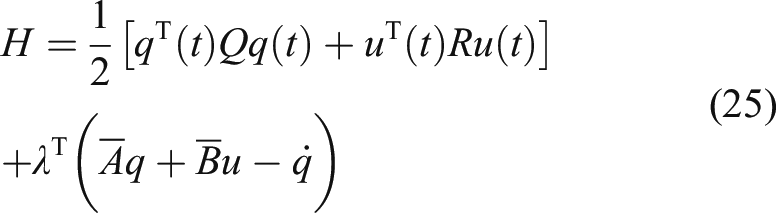
It is easy to verify that the linear system (21) is fully controllable by the controllability criterion, so the linear quadratic optimal control of the system (21) can be realized by state feedback. LQR method is used to design the controller, and the objective function is defined as



In simulation and experiment,

Simulations and experiments
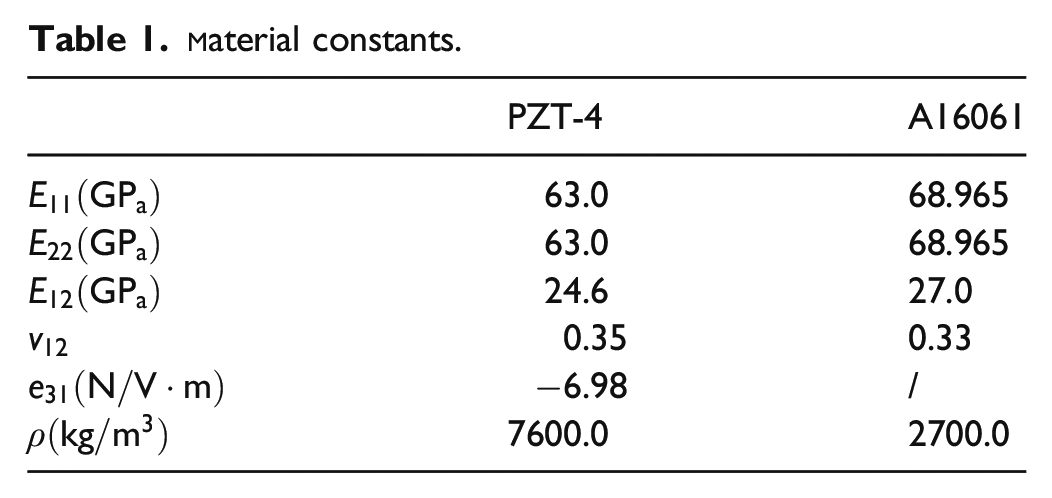
The base part of piezoelectric cantilever beam is aluminum beam of A16061 (See Figure 3), with the size of Element division of cantilever beam in simulation.

Simulation of frequency domain response
In order to verify the correctness of the cantilever beam model established in this paper, the natural frequencies the first three modals are obtained by the following method: we assume that the initial displacement at node x
6 is 0.028 m, the open-loop response of the system can be obtained from (18). Figure 4 shows the open-loop time-domain response and frequency-domain response of node x
6. Open-loop response at the end of the sixth node.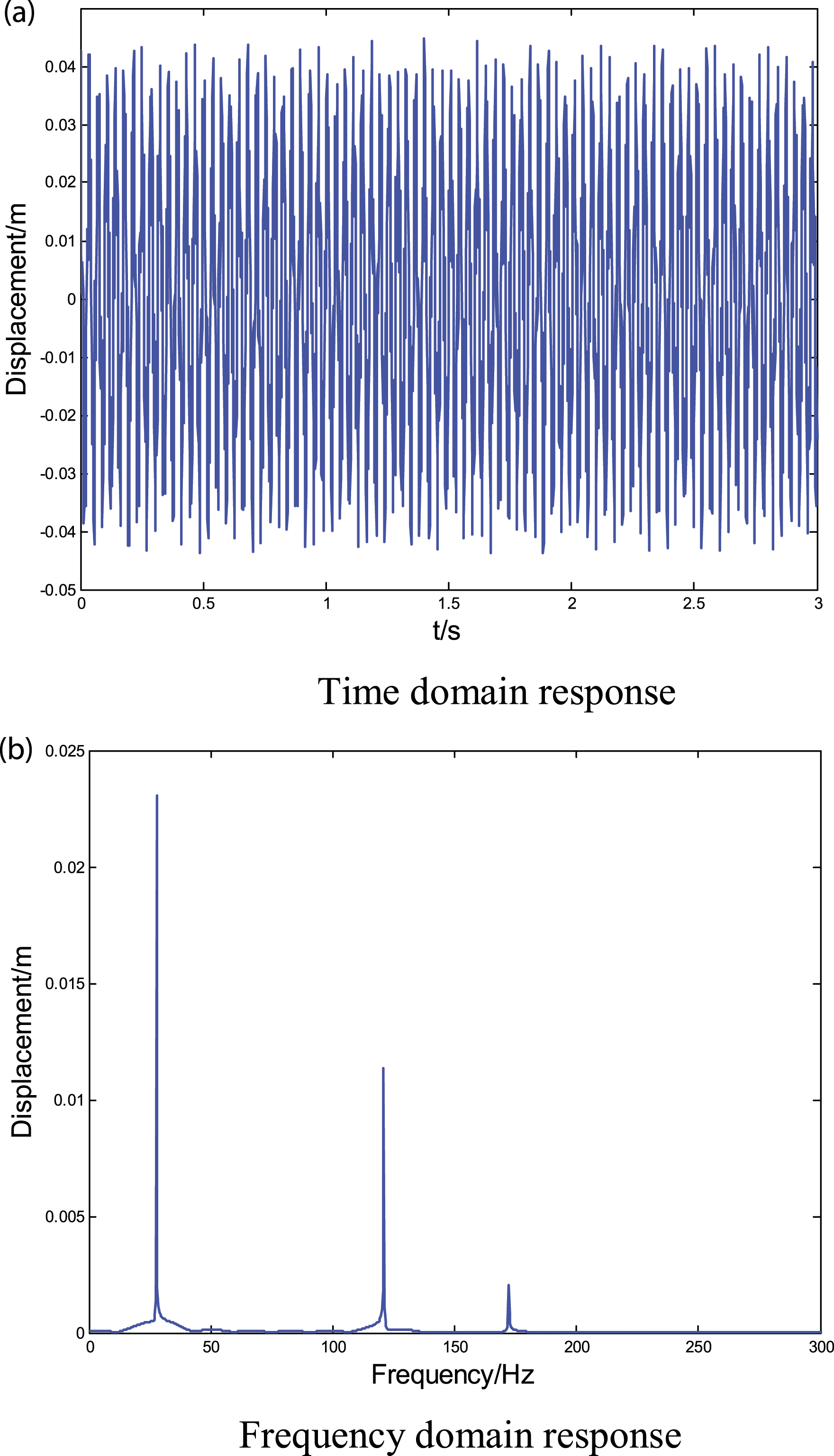
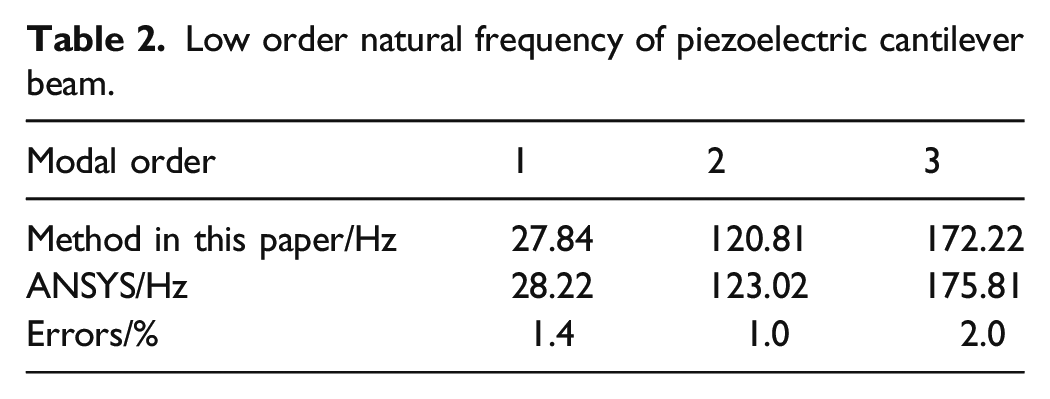
Low order natural frequency of piezoelectric cantilever beam.
Simulation of transient vibration control response under instantaneous excitation
In order to verify the effectiveness and superiority of the proposed LQR control method based on the independent modal space, LQR control method and conventional PID method are respectively employed to control the vibration system of cantilever beam. In the analysis, it is assumed that the middle point of the beam is impacted by a force, resulting in an initial displacement of 0.028 m at the end of the sixth node. Figures 5(a) and (b) shows the vibration control effect of the first and second vibration modes of the controlled cantilever beam, which is measured by the displacement response at the fifth and sixth node under the action of the designed LQR controller. The uncertainties of system (19) is chosen as Transient state vibration control under initial disturbance.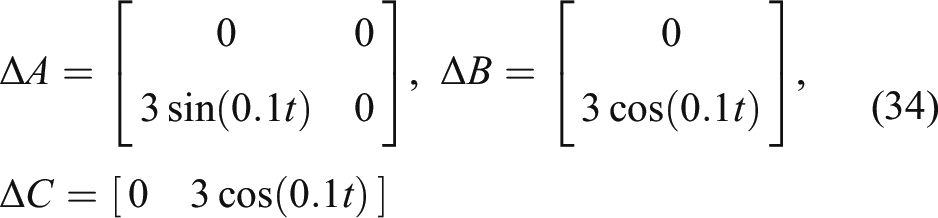
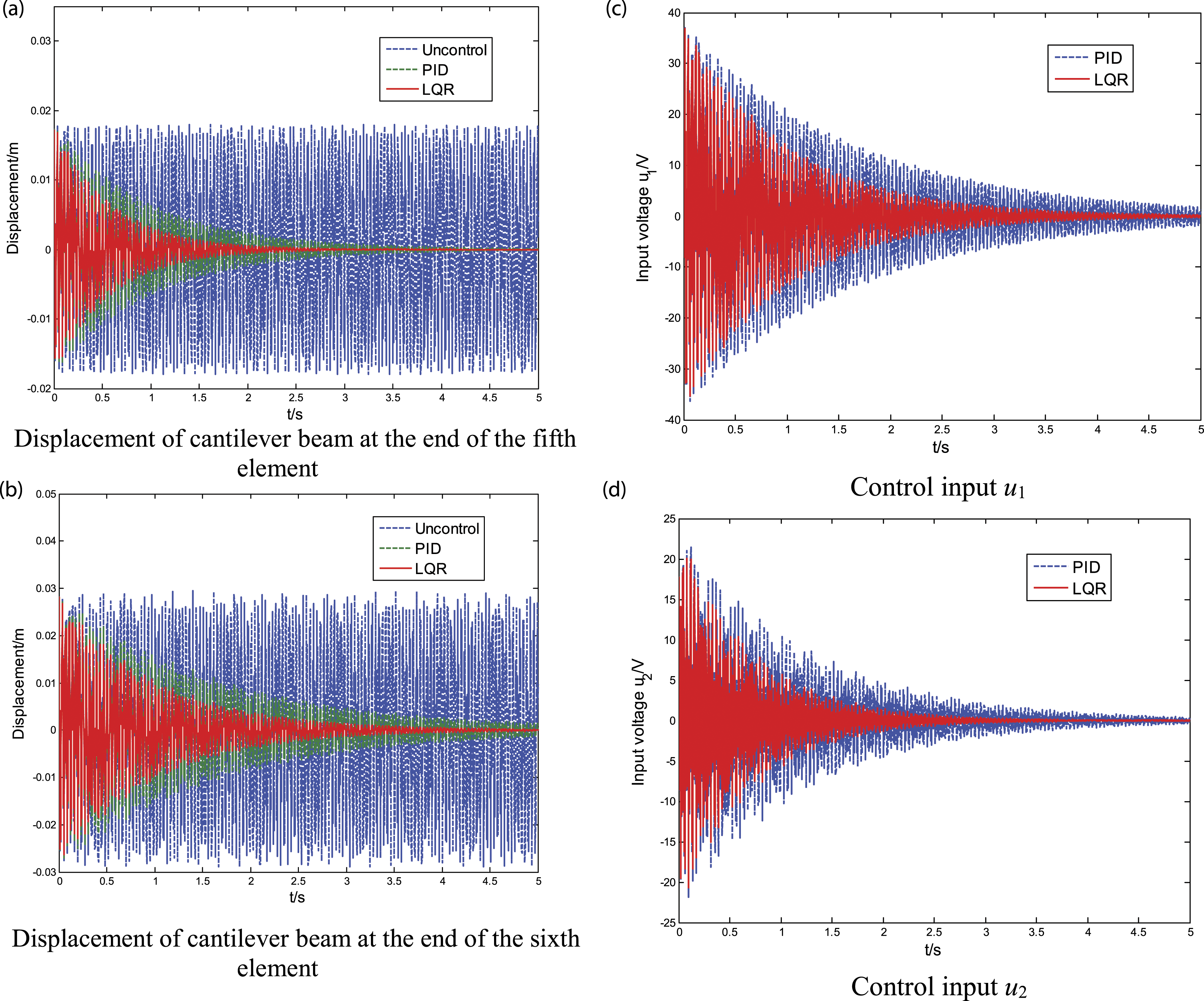
The input voltage vector
Simulation of vibration control response under continuous excitation
In order to investigate the vibration control effect of piezoelectric cantilever beam under continuous external excitation, the random excitation signal is selected as the external excitation signal in simulations. Random excitation is a common excitation method in the field of vibration engineering, which can fully excite various vibration modes of the vibration isolation system in the vibration control experiments. Under the condition of keeping the physical parameters and controller parameters unchanged, we obtain the control effect of the cantilever beam system under the pseudo-random excitation. The displacement responses at the end of the fifth and sixth elements (two elements without piezoelectric layer) of the cantilever beam are shown in Figure 6. Steady state vibration control under continuous excitation.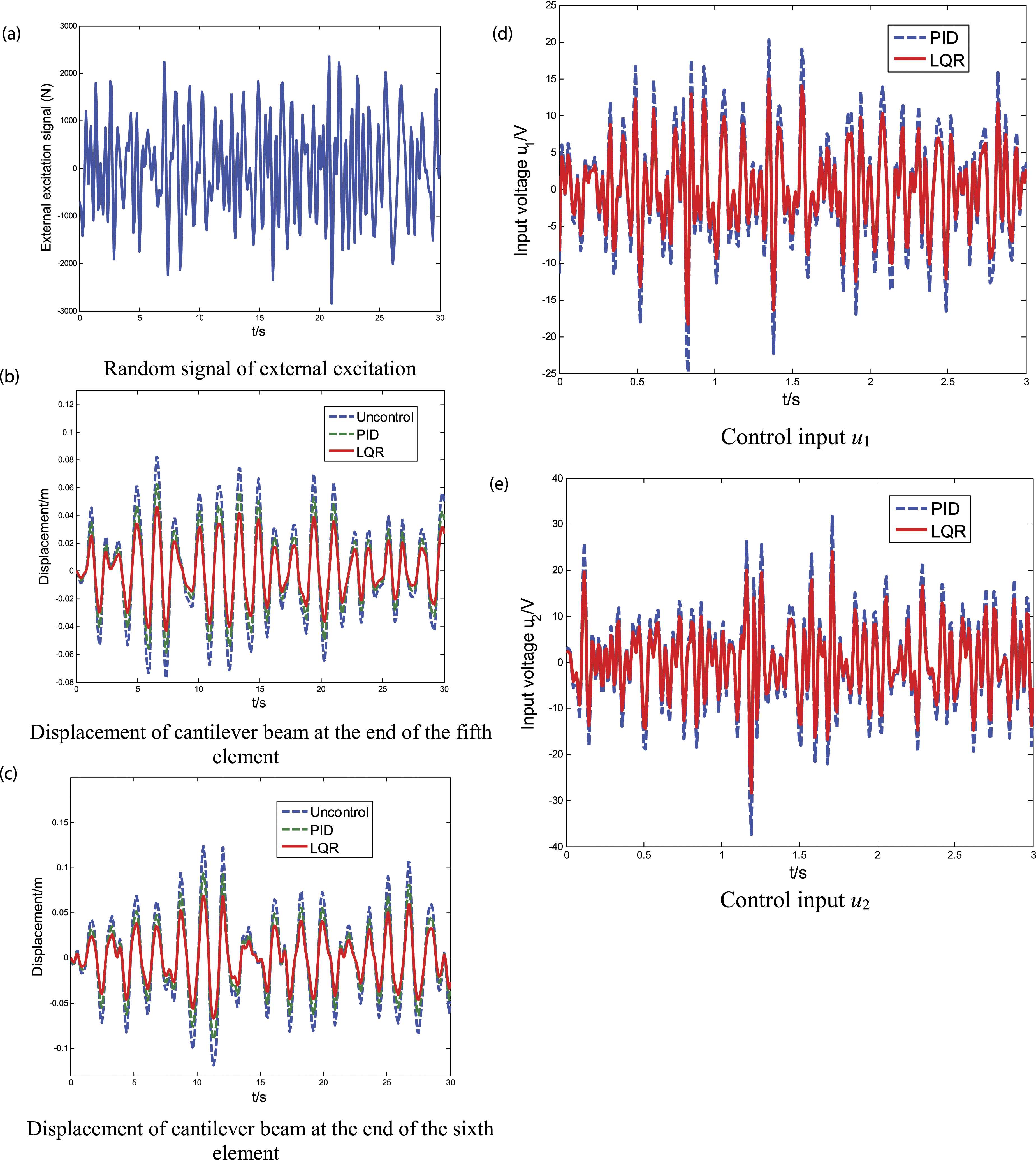

Vibration control effect under different excitation.
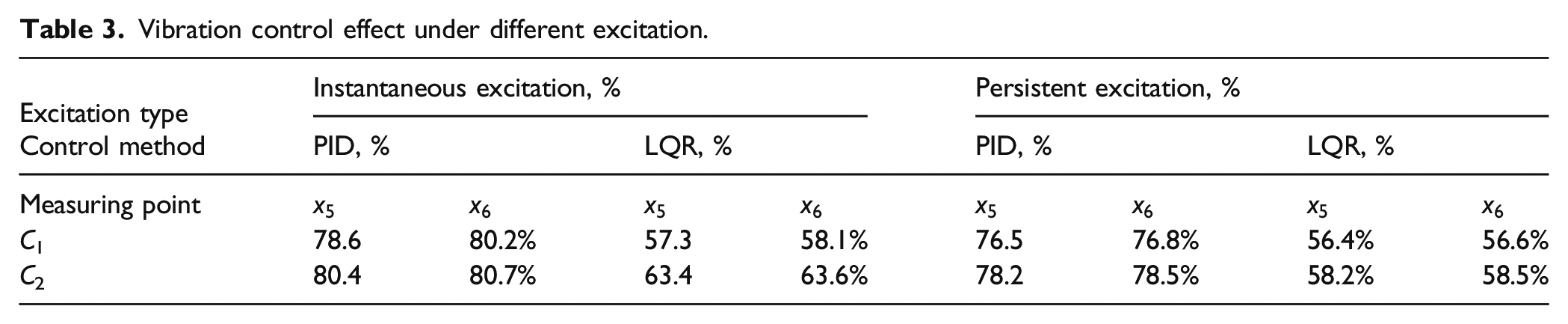
From Figure 5(a) and (b), Figure 6(b) and (c) and Table 3, it is seen that the control effect of PID control method of the system is very limited, while the proposed LQR control method based on the independent modal space method can reduce the root mean square value of displacement from abou 80% to within 60%. At the same time, in Table 3, it is seen that the system’s control precision varies with different external excitation signals, and the control accuracy of the random excitation is lower than that of the instantaneous excitation signal due to the signal uncorrelation between the front and rear time.
Real experiments
The active control system of piezoelectric laminated beam vibration mainly includes three parts: information acquisition and transmission system, active controller system and actuator system. The composition and work flow of the system are shown in Figure 7. It can be seen from Figure 6 that the system is a closed control system. According to the vibration state of the controlled structure, it carries out real-time external force control to make the vibration state track the balance state. The steps of the active vibration control system are as follows: Experimental principle block diagram of vibration control system for piezoelectric cantilever beam.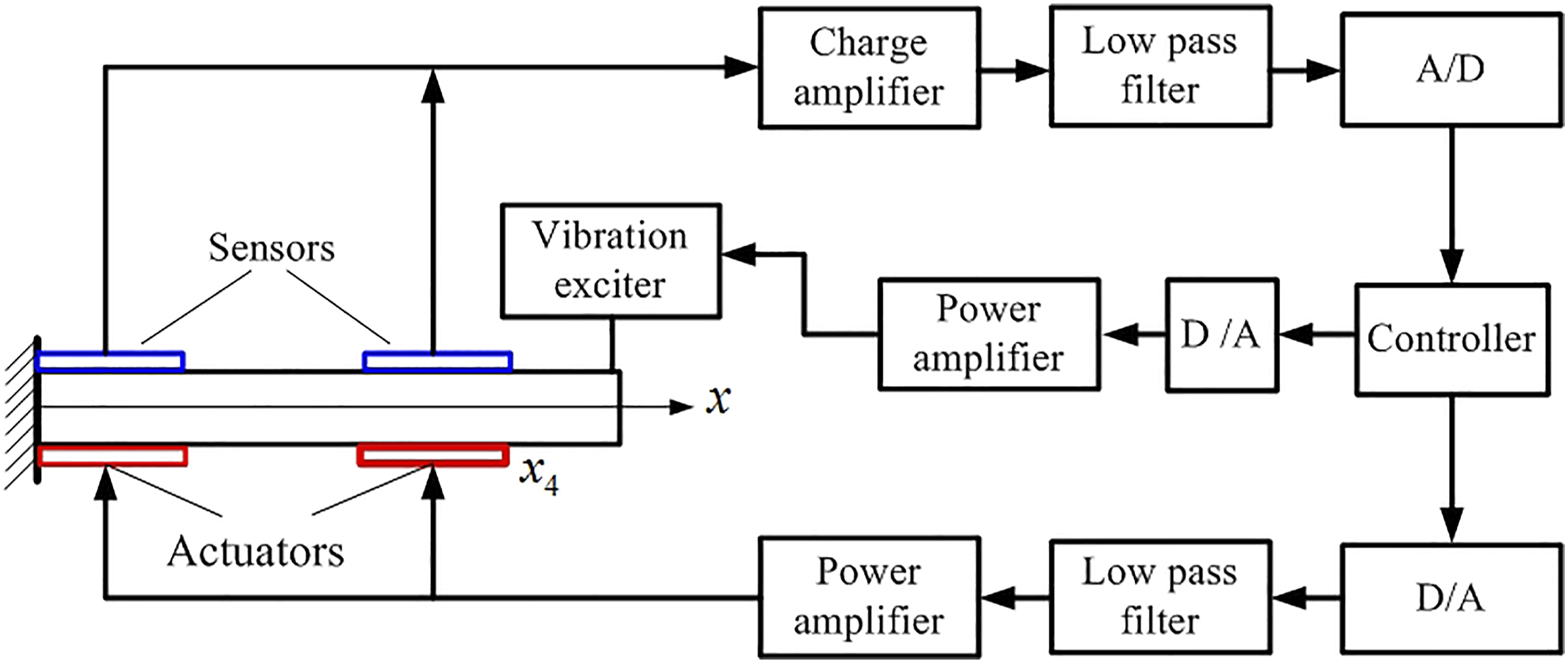
Repeat steps 1–6 to minimize the vibration response of the structure.
The parameters of piezoelectric intelligent cantilever beam, sensor and actuator in the experiment are the same as those in the simulation. The EL-Centro wave generated by the vibration exciter is applied to the end of the piezoelectric cantilever, and the displacement and acceleration of the end of the piezoelectric intelligent cantilever beam are measured. Comparing the LQR control method designed in this paper with the conventional PID, the results of active vibration control are shown in Figure 8. Results of active vibration control under EL-Centro wave.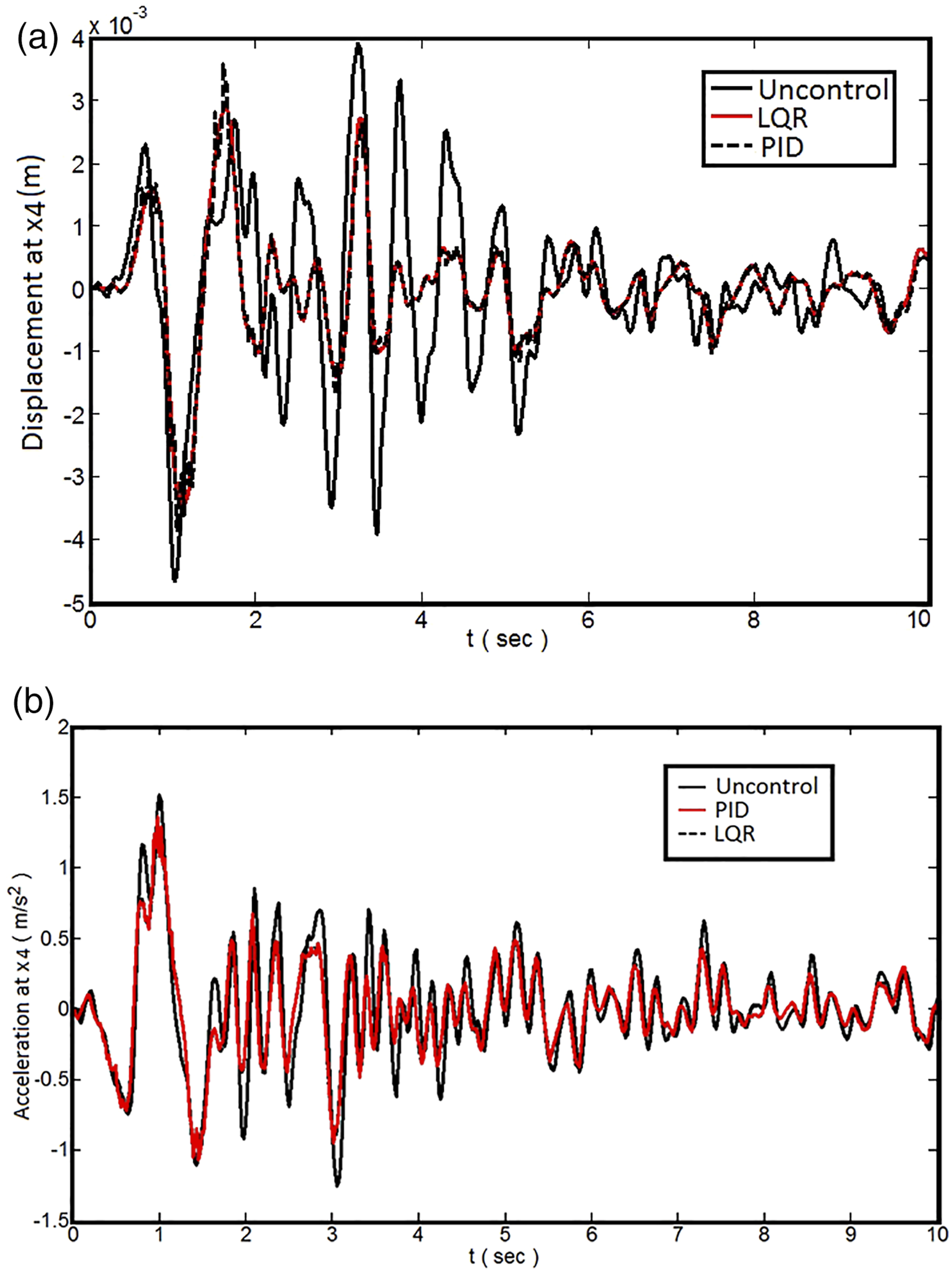
Conclusion
According to the first-order transverse shear deformation theory of laminated beams, the equivalent transverse bending stiffness of cantilever laminated beams considering the stiffness characteristics of piezoelectric materials can accurately reflect the inherent characteristics of piezoelectric structures. Because the model established by the finite element method usually has a large degree of freedom, which is not conducive to the design of the controller, the finite element model is reduced by the modal superposition principle. Considering the time-varying of the system parameters, the independent modal space control method based on LQR is designed respectively to suppress the vibration of the structure, the weighted matrices Q and R are selected as according to the energy criterion. In the simulation analysis, the low-order frequency value calculated by the proposed method is compared with the calculation result of ANSYS software, and the results are almost the same. In addition, from the simulation and experiment results of the LQR control method, it can be seen that the LQR control method designed in this paper can effectively control the vibration of the cantilever laminated beam. In the future, in order to improve the robustness and adaptability of vibration controller for piezoelectric intelligent cantilever beam with uncertainties, the robust adaptive control method will be studied.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China under Grant U1404614, in part by the Science and Technology Planning Project of Henan Province of China under Grant 182102310926 and Natural Science Foundation of Henan Province of China under Grant 202300410303. Open fund project of Key Laboratory of Industrial Internet of Things & Networked Control of the Ministry of Education of China under Grant 2020FF05, Foundation of ExcellentYoung-Backbone Teacher of Colleges and Universities in Henan Province of China under Grand 2019GGJS182, Key Scientific Research Project of Henan Colleges and Universities of China under Grand 21B120001, the Nanyang Normal University Foundation of China under Grant 2019STP002.