
Abstract
For continuous sliding mode control (SMC) in the unified chaotic systems subjected to matched/unmatched uncertainties, a novel chattering-free SMC design is proposed. First, an augmented state is introduced such that it becomes possible to develop a continuous controller to eliminate the undesired chattering which often appears in the typical SMC. Then by using this chattering-free controller, the chaos behavior in unified chaotic systems with matched uncertainties can be completely suppressed. As for the unmatched uncertainties, every state of controlled systems can be driven and limited to a predictable bound, which is not addressed in the literature. Finally, the effectiveness of the proposed chattering-free controller is verified by the numerical simulations.
Introduction
Chaos has been found in the dynamics of various engineering fields since the famous Lorenz model was proposed to describe the dynamics of the atmosphere. 1 The chaotic response looks random, but it is quite different from the stochastic process. Unlike stochastic processes, chaotic systems are with deterministic nonlinear dynamics to illustrate the chaotic behavior. And there are many distinct characteristics, such as positive largest Lyapunov exponents, boundedness of strange attractors, initial value sensitivity (so-called butterfly effect), extensive spectrums of Fourier transform, random-like responses, fractal properties of states, and so forth. 2,3 Because chaotic phenomena have been discovered in engineering systems and their random-like state response also provides wide applications for communication encryption, many scholars have devoted themselves to the research of chaos control and synchronization. 4,5 Furthermore, because state responses of chaotic systems are highly sensitive to initial conditions and unpredictable, chaos control has become an important issue in chaos applications. There has been a wide range of effective approaches developed in the literature to control and stabilize the chaotic behavior of systems, for example, robust sliding mode control, 6–8 feedback control method, 9 backstepping control design, 10,11 optimal control, 12,13 and so on. In the above researches, the sliding mode control has received much attention mainly due to the attractive advantages, such as fast and good transient response, simple structure, easy implementation, and good robustness to external disturbances and parameter uncertainties. However, the use of the discontinuous function in SMC causes the chattering phenomenon which can result in high-frequency oscillations and affect the performance in the controlled system. To solve the chattering problem, Zhang 14 proposed an integral SMC method for a class of uncertain chaotic systems to eliminate the undesired chattering. But it needed multi-dimensional inputs to complete the control design, which increases the complexity of the system. Another approach frequently introduced to suppress the chattering is to modify the designed discontinuous SMC with the boundary layer method. 15–18 But it can only ensure the sliding motion outside a specified boundary layer, which will affect the control performance. Also, in the recent works, 19–21 the adaptive backstepping SMC was proposed to effectively eliminate the chattering and complete the actual engineering system control. However, their methods only developed for matched uncertainties and cannot directly apply to unmatched cases.
In 2002, to bridge the Lorentz attractor with the Chen attractor and the Lü system, the authors 22 proposed a unified chaotic system which attracted the interest of many scholars. The robust stabilization of unified chaotic systems was considered using sliding mode control theory. 23,24 The authors 25 studied the chaos suppression of unified chaotic systems with feedback control. However, the control approaches mentioned 22–24 are not suitable for systems subjected to external unmatched uncertainties. Usually, external disturbances in control realization are undesired, but due to environmental limitations, it is always inevitable. If external disturbances are not considered in the control design, it will lead to the failure of controlled systems. Usually, when the system is disturbed by unmatched uncertainties, it is impossible to completely eliminate the influence through the controller. Motivated by the aforementioned works, this paper aims to propose a novel continuous SMC to suppress the chaotic behavior of unified chaotic systems even under matched/unmatched uncertainties. Contrary to the previous works for chaos control with SMC, we will introduce an augmented state method to develop a chattering-free SMC design. When the system is interfered with matched uncertainties, its influence can be completely suppressed and the matched uncertainties can also be accurately identified; and when the system is interfered by unmatched uncertainties, although the influence cannot be fully eliminated, every state of controlled systems can be driven and limited to a predictable bound, which is not addressed in the literature.
The rest of this paper is outlined as follows. Notation gives the system and problem formulations including the design of sliding mode control and the switching function. Control performances in the sliding manifold for systems are considered for both matched and unmatched uncertainties. The novel chattering-free SMC is presented in Continuous Chattering-Free Controller Design. Numerical Simulations includes the numerical simulations to evaluate the control performances for both matched/unmatched cases. Finally, conclusions are included in Conclusion.
Notation
System description and problem formulation
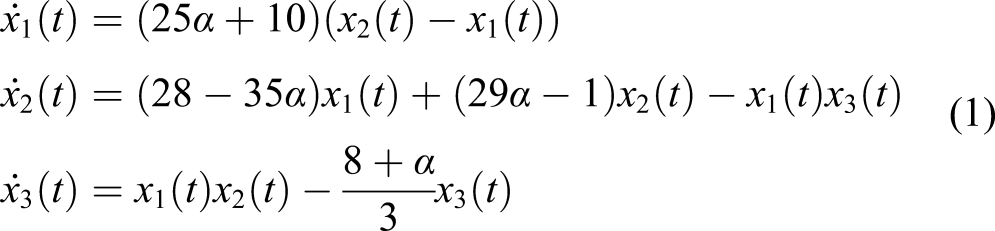
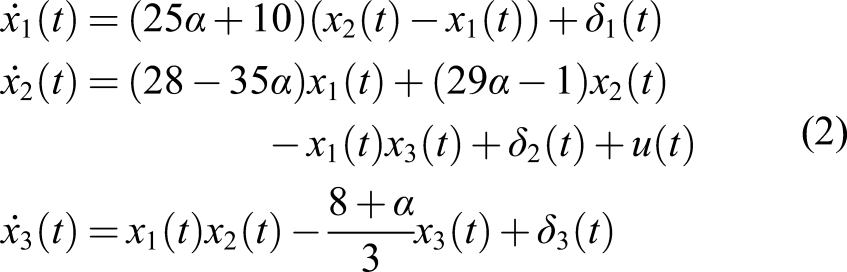
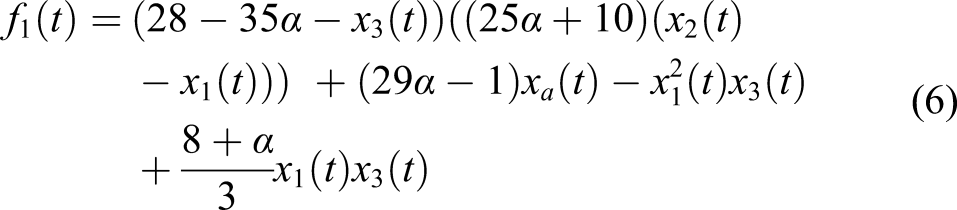
A nonlinear unified chaotic system proposed by Lü et al.
22
is described by Strange attractors of system (1) with 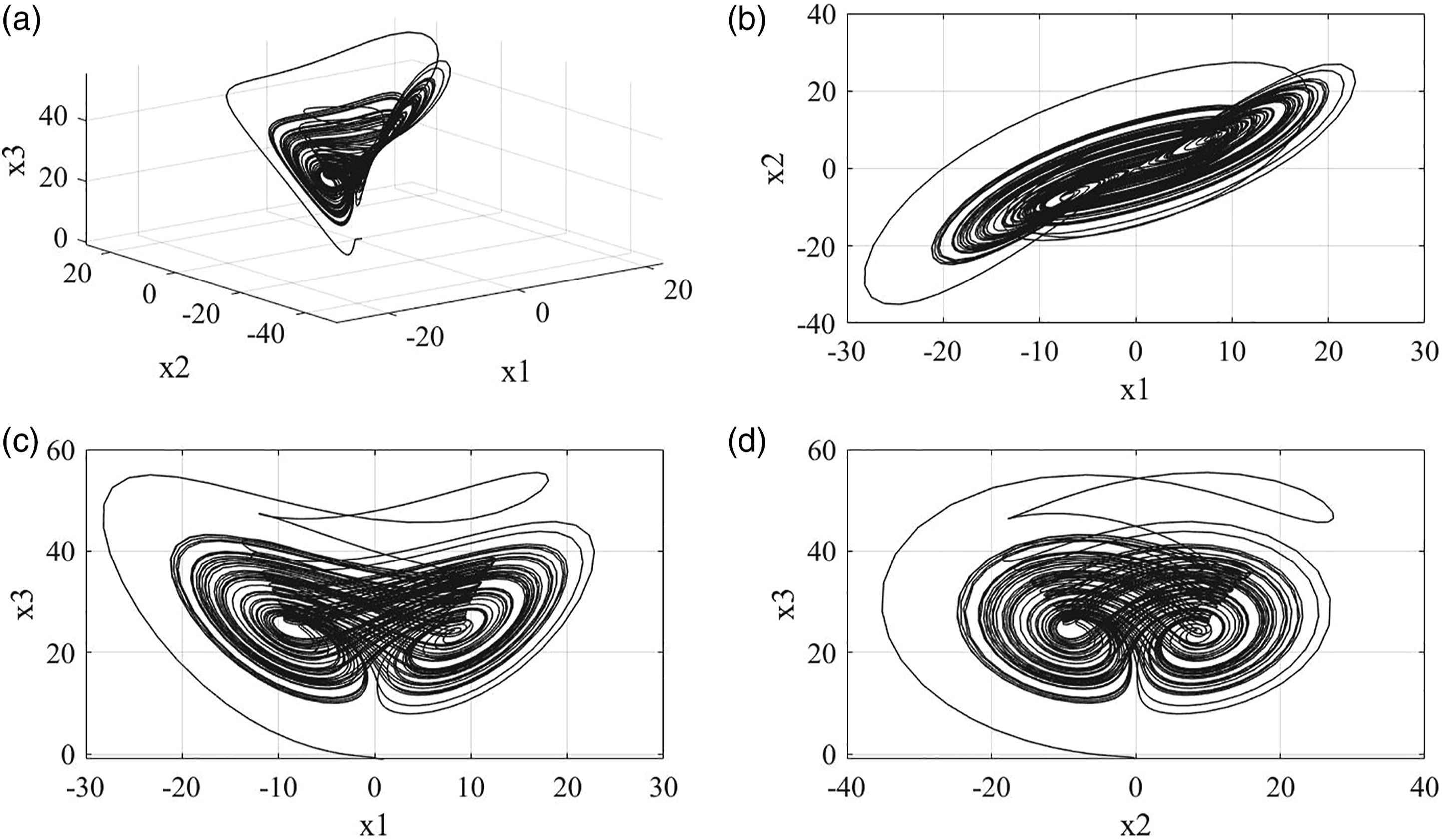
Problem formulation
By introducing uncertainties and the control input
We introduce an augmented state as shown in (3) to the system.

Then by (3), we have

For simplicity, we rewrite (4) as


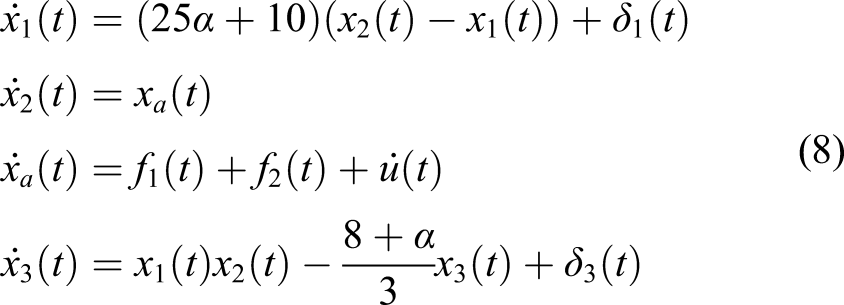
This study aims to present a chattering-free SMC to control the chaos behavior in the augmented unified chaotic system (8). By using the SMC technology, we firstly design a proper switching function for the augmented system (8) and ensure the control effect for the system in the sliding manifold even subjected to matched/unmatched uncertainties. Next, we propose a continuous SMC to force the trajectory of the controlled system (8) to hit and stay on the switching surface without chattering. Now define the switching function as


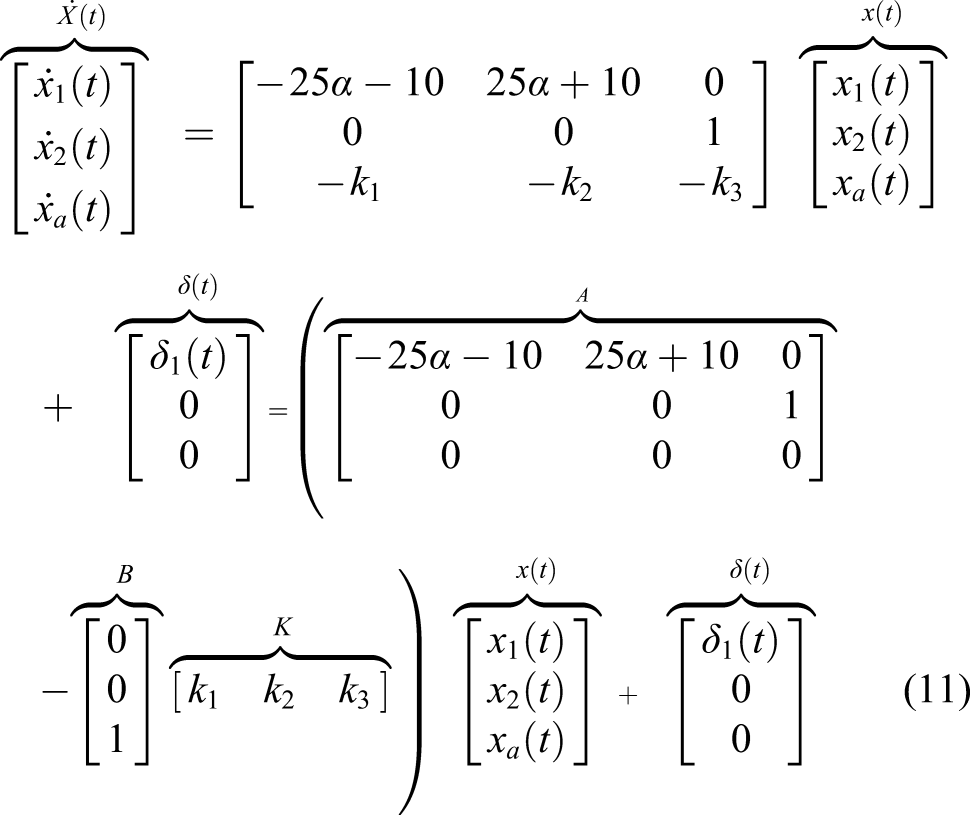
Obviously, in (11), the matrix
Solving (11), one has for

Now select an invertible matrix

We can estimate the bound of
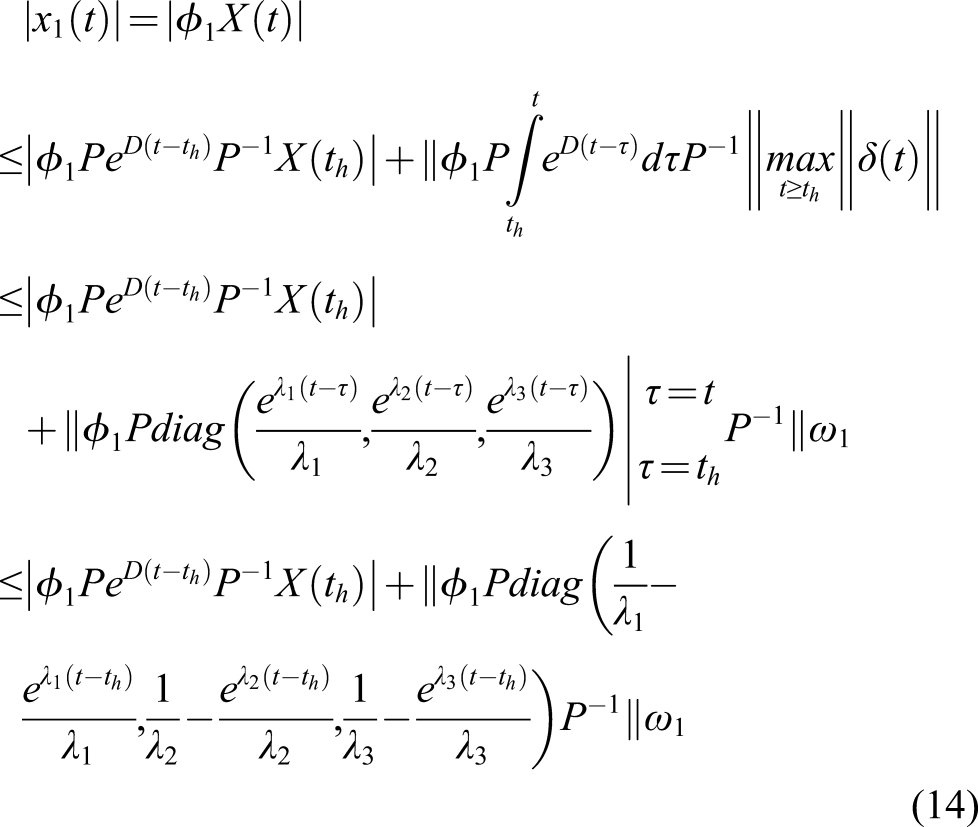
Since
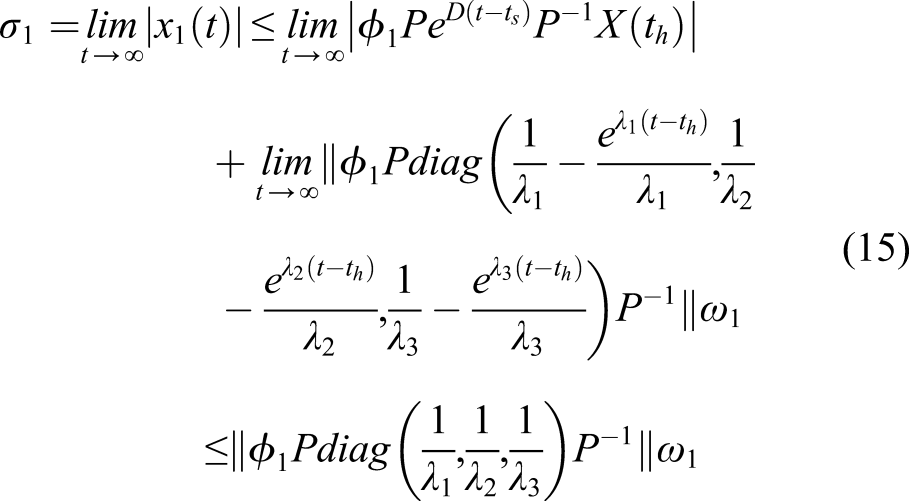
Similar to the derivation in (14) and (15), we have


Furthermore, from (2), since
For the system with matched uncertainties
For the matched uncertainties, since all states including the augmented state
From (3), the augmented state
Continuous chattering-free controller design
To achieve the reaching condition




Furthermore, since
The continuous chattering-free SMC design can be systematized as following steps.
Introduce an augmented state as (3).
Choose a matrix
Define the switching function
Calculate the corresponding eigenvectors for eigenvalues
Construct the continuous chattering-free SMC by using (19) or (20).
Numerical Simulations
Consider the nonlinear unified chaotic system described in (2) with

Therefore, by (11), we have
Obviously

The chattering-free SMC
In the following, we consider the matched and unmatched uncertainties, respectively, to perform the simulations and evaluate the present chattering-free SMC design.
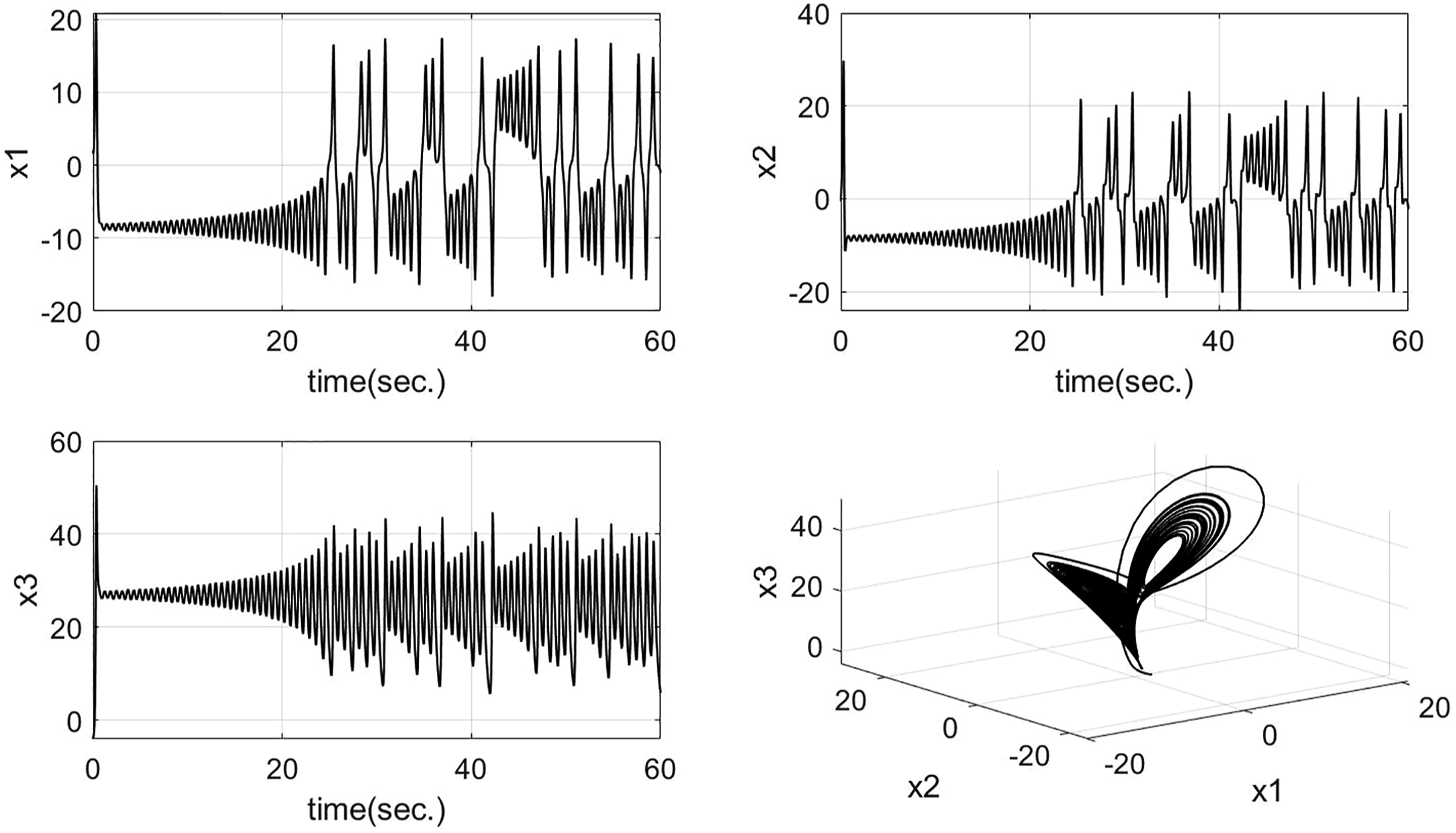
Complete suppression for the matched uncertainty
In this simulation, we first consider the matched case and the unmatched uncertainties are all zero, i.e., (a) Time response of Time response of The state responses and strange attractors of the disturbed system without control input 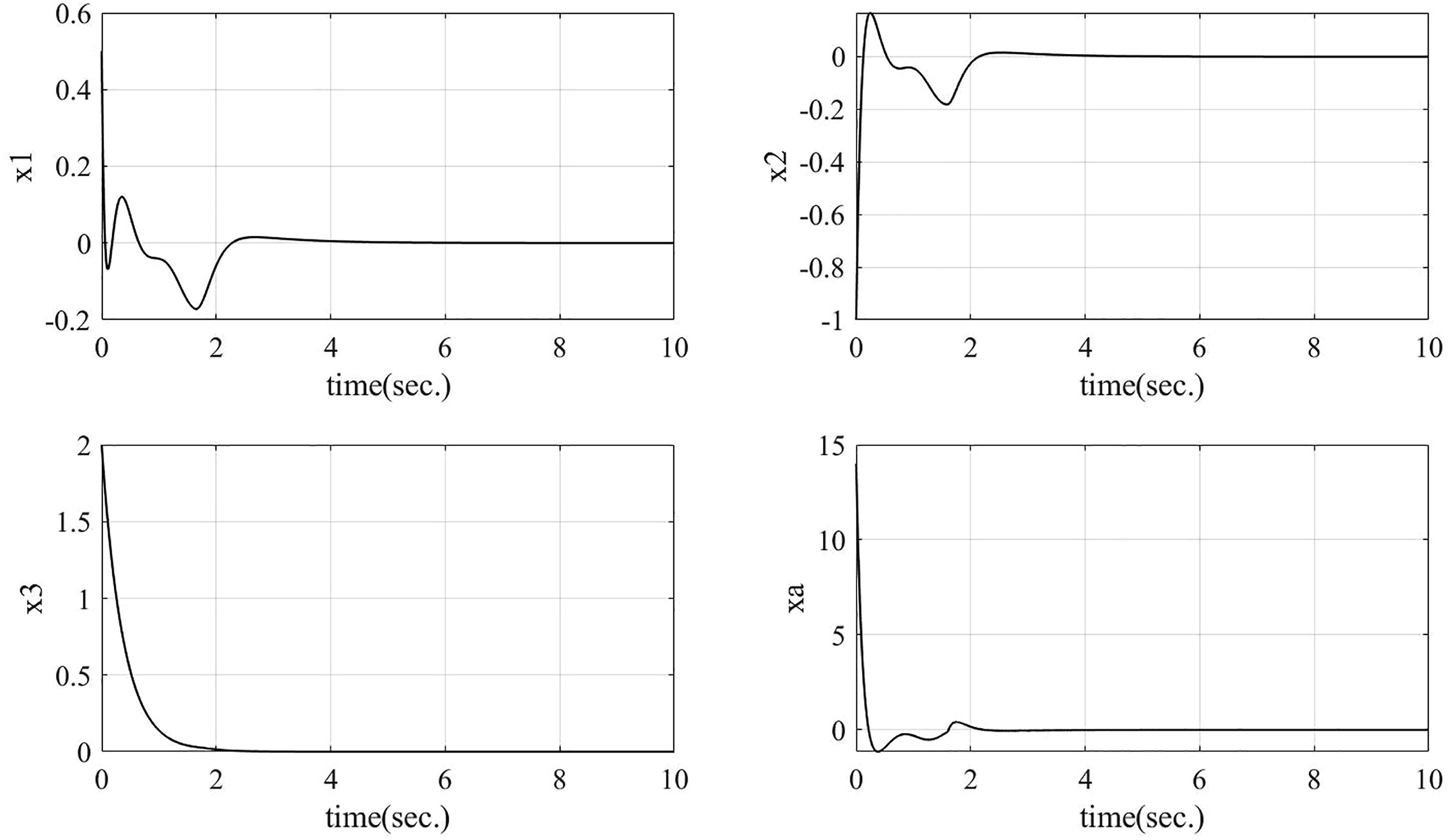
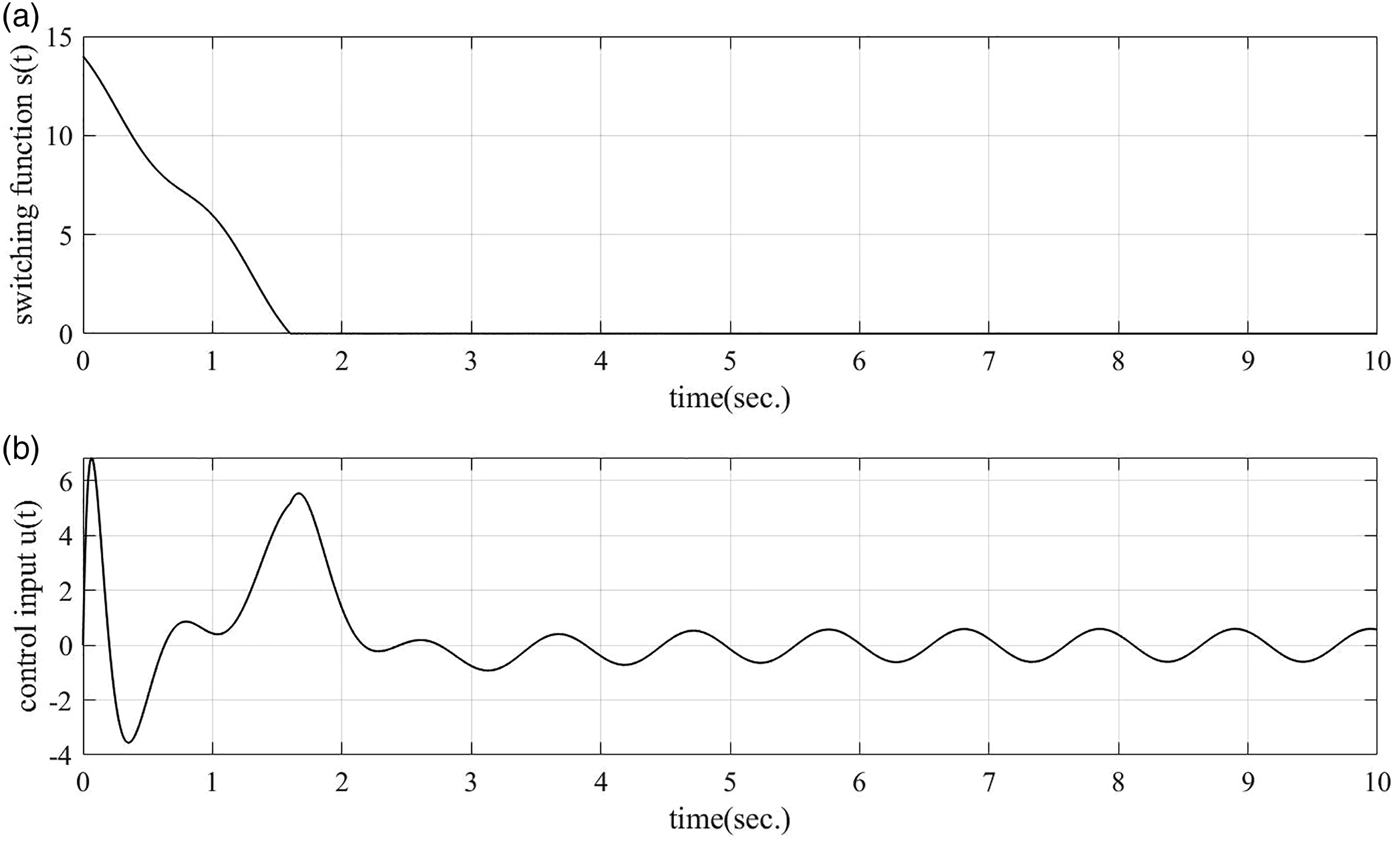

Robust chaos suppression with unmatched uncertainties
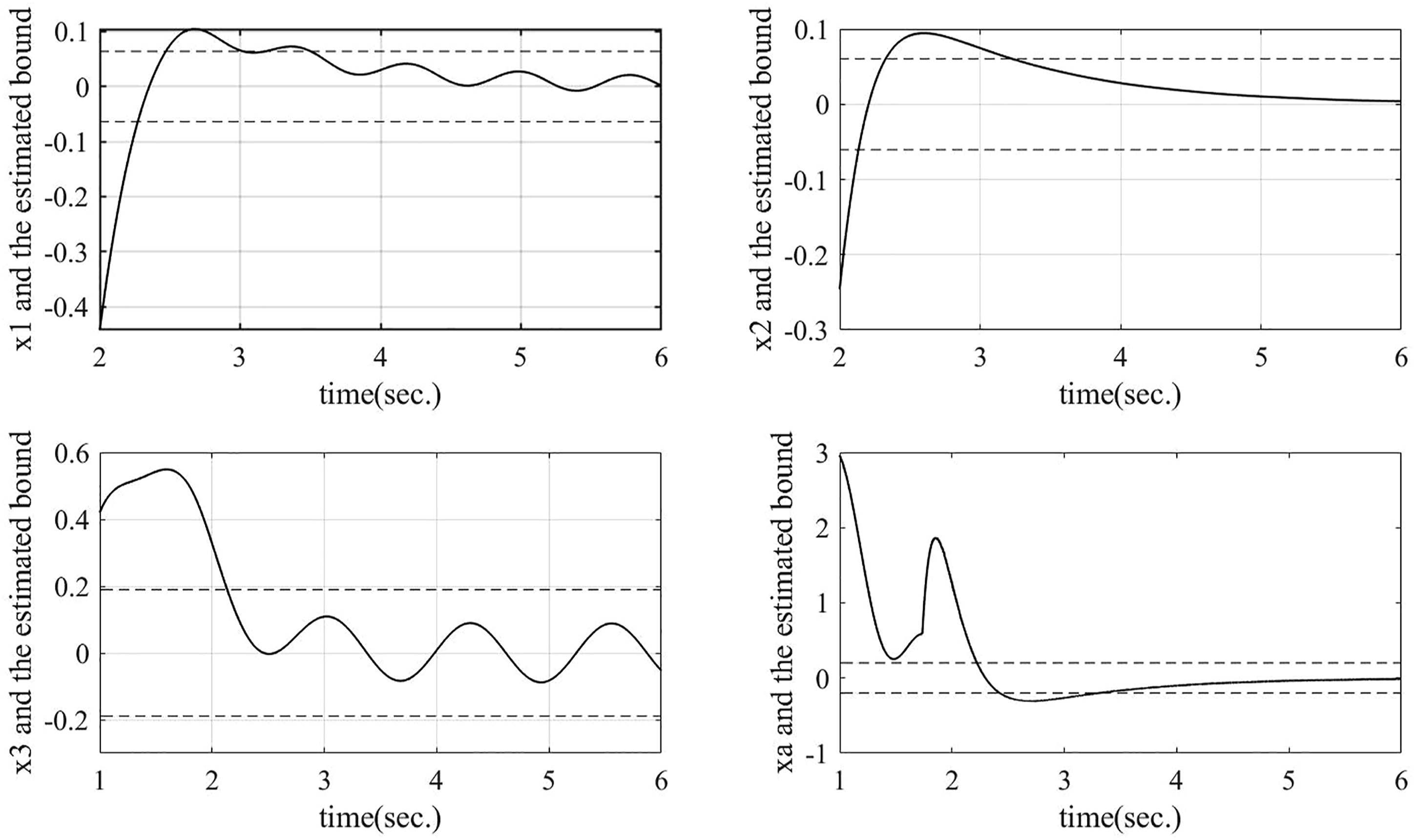
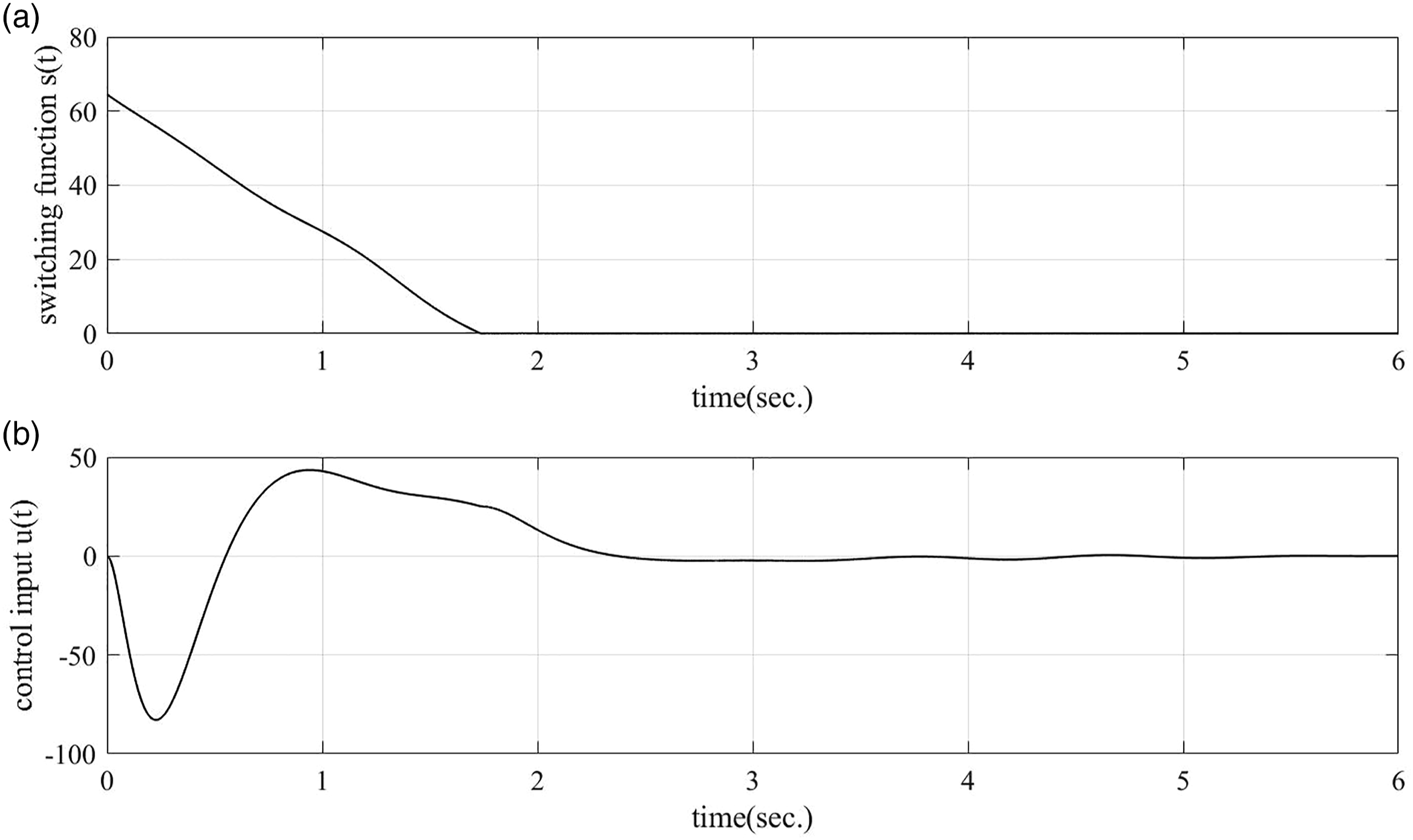
For the case of unmatched uncertainties, we set the uncertainties with
Time responses of original states and augmented state with mismatched uncertainties. The suppressed states and estimated bounds. (a) Time response of s(t), (b) the continuous SMC.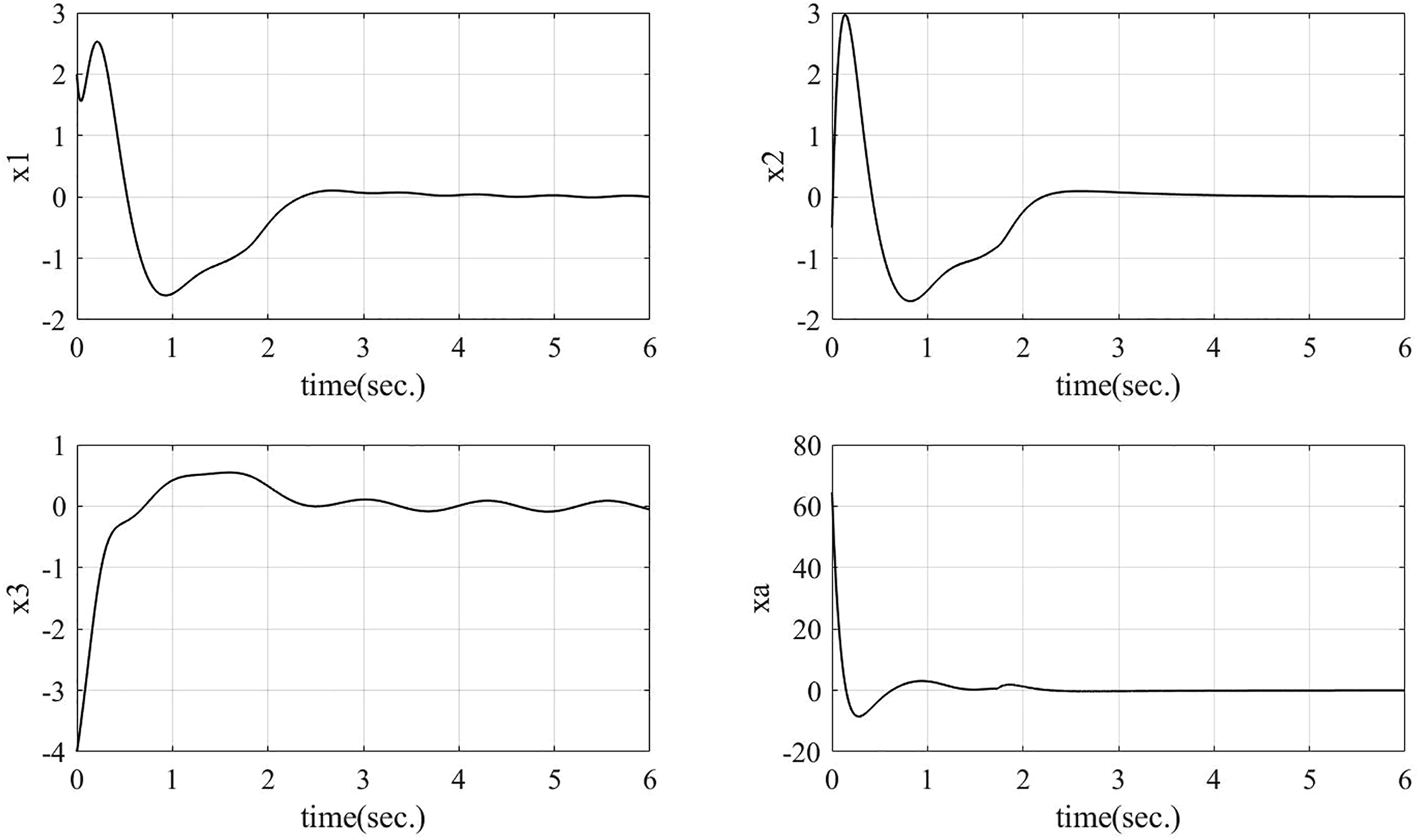
Conclusion
In this paper, we propose chaos suppression of unified chaotic systems with robust chattering-free sliding mode control. In contrast to the traditional sliding mode control, an augmented state is introduced such that a continuous control input is newly proposed to eliminate the chattering phenomenon. Then by using this chattering-free controller, the chaos behavior in unified chaotic systems with matched uncertainties can be completely suppressed and the matched uncertainties can also be accurately identified. Moreover, the bounds of controlled states have been evaluated even subjected to mismatched uncertainties. Numerical simulations for both matched and unmatched cases have been performed to verify the effectiveness of this proposed chattering-free SMC method. However, since this proposed design only introduces a single input, the transient process of chaos suppression is longer. Therefore, if one needs significantly speed up the chaos suppression, multi-dimensional inputs are necessary, but they will increase the complexity of the controlled systems. Therefore, in the near future, extending the proposed chattering-free design to obtain the finite-time chaos suppression is the proposed main work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by the Ministry of Science and Technology, Taiwan, under grant MOST-110-2221-E-167-030 and MOST-110-2218-E-006-014-MBK.