
Abstract
A complementary computational approach is proposed for the time-varying Takagi–Sugeno fuzzy model system (TVTSFMS). The proposed approach integrates orthogonal-functional approach (OFA), hybrid Taguchi genetic algorithm (HTGA), and a stabilizability condition (SC) for use in designing stable and quadratic-optimal parallel-distributed-compensation (SQOPDC) controllers for optimal control problems. First, the SC was set according to linear matrix inequalities (LMIs). Next, OFA was used to derive an algorithm that only required algebraic computation to solve the TVTSFMS. Finally, The HTGA could be used to search the SQOPDC controller for the TVTSFMS. The SQOPDC controller obtained by the proposed complementary computational approach was evaluated in a case study of a vibratory pendulum design; the successful design verified the usability of the proposed hybrid intelligent computing method.
Keywords
Introduction
The plant in an actual control system is mostly nonlinear. Therefore, scholars have developed many different approaches to designing controllers in nonlinear control systems in order to solve controller design problems in actual control systems.
1
In the Takagi–Sugeno fuzzy model, each fuzzy rule for the local linear control system is represented by a linear dynamic equation.2–7 The overall nonlinear control system is then formalized by combining the fuzzy rules. Therefore, linear control theory is generally used in controller design. For nonlinear time-varying systems, it is difficult to design the controllers. Using Takagi–Sugeno fuzzy model (TSFM), the overall nonlinear time-varying system can be formalized by combining the fuzzy rules such that the linear control theory can be used in the controller design facilitating the controller easy implementation in practical situation. However, an important research issue is the design of stable and quadratic-optimal parallel-distributed-compensation (SQOPDC) controllers for a time-varying Takagi–Sugeno fuzzy model system (TVTSFMS) with a minimized performance index. Though the PI/PD/PID controller can be easily implemented in practical situation, it is very difficult to design the PI/PD/PID controller for the time-varying Takagi–Sugeno fuzzy model system (TVTSFMS) with a minimized performance index. In general, linear matrix inequalities (LMIs) are applied to design the SQOPDC controller of time-invariant Takagi–Sugeno fuzzy model systems. However, the LMIs are not directly applicable for solving the problem of designing an SQOPDC controller for a TVTSFMS.8–14 Therefore, the objective of this study was to develop a complementary computational approach in which orthogonal-functional approach (OFA) is used to convert the SQOPDC controller design problem of the TVTSFMS into an algebraic computation problem.
15
To simplify the controller design problem, the proposed approach also integrates hybrid Taguchi genetic algorithm (HTGA)16–19 and LMIs in the design process to ensure that the TVTSFMS can be stabilized in a closed loop. Here it should be noticed that, for the TVTSFMS, the OFA or the LMI technique cannot be applied alone to find the SQOPDC controllers, and it is also very difficult to apply the genetic algorithms alone to find the SQOPDC controllers. So, in this paper, we complementarily fuse the OFA, the HTGA and the LMI technique to solve the design problem to be studied. The proposed integrative method fusing the OFA, the HTGA and the LMI technique belongs to the hard-computing-assisted soft-computing category, where the OFA and the LMI technique belong to the hard computing constituents and the HTGA is one of the soft computing constituents. That is, the main contribution of this paper is to integrate the OFA, the HTGA, and an LMI-based stabilizability condition (SC) for use in designing SQOPDC controllers for optimal control problems. A system block for the closed-loop system is shown in Figure 1. Stable and quadratic-optimal parallel-distributed-compensation controller of the time-varying Takagi–Sugeno fuzzy model system.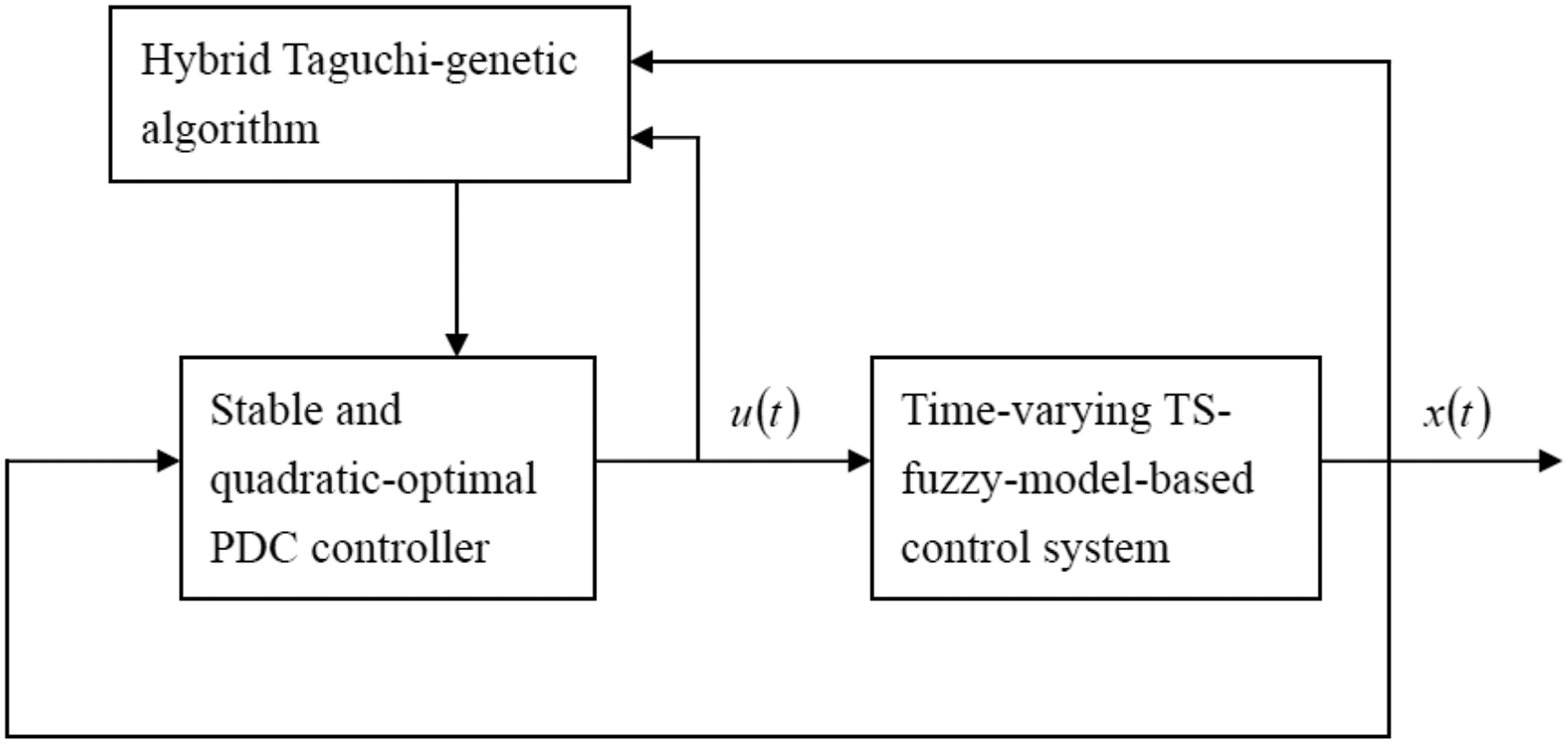
Problem statement
A TVTSFMS can be expressed as follows:

The TVTSFMS in equation (1) has the following two characteristics: (i) time-varying elements
Equation (1) can be rewritten as


In equation (3), the stabilizability problem is whether
To stabilize SQOPDC controller Therefore, the question considered in this study is how to specify a value for Therefore, the SQOPDC controller design process is specifying


Step 1: Verify that the SC of the LMI in equation (4) is the constraint condition.
Step 2: For the TVTSFMS, minimize J in equation (6). That is, the design problem of the SQOPDC controller for the TVTSFMS is a constrained-optimization problem. In the next section, we will complementarily fuse the OFA, the HTGA and the presented LMI-based SC to solve the SQOPDC controller design problem of the TVTSFMS in equation (1), where the performance index J in equation (6) subject to the constraint of SC in equation (4) is considered to be directly minimized, where if there is no solution for equation (4), a penalty is given in the HTGA.
SQOPDC controller design
First, we define


Next, an orthogonal function (OF) can be used to obtain



By substituting

From the orthogonal condition and the properties of OF, the product of any two OFs can be acquired and can be expressed by the following formula
15

The consequent output only requires inference in an extremely short time interval. Therefore, integrating equation (2) yields

The coefficient matrix of equation (14) can then be expressed as
Given a set of local feedback gain matrices
The above algebraic calculation clearly indicated that specifying a

If (i) constraints
From the results mentioned above, we can see that, by using the OFA, we can transform the SQOPDC control problem for the TVTSFMS into a static optimization problem represented by the algebraic equations. Then, by incorporating the LMI-based SC for this TVTSFMS, the static optimization problem becomes a static constrained-optimization problem represented by the algebraic equations with constraint of LMI-based SC. This means that the main characteristic and contribution of this technique, bringing the OFA and the LMI-based SC together, is that it reduces the mixed H2/LMI PDC controllers design problem to that of solving a static constrained-optimization problem of algebraic form; thus greatly simplifying the mixed H2/LMI PDC controllers design problem and facilitating the work of applying genetic algorithms to solve the SQOPDC controllers design problem. The proposed integrative method, that complementarily fuses the OFA, the HTGA and the LMI-based SC, belongs to the hard-computing-assisted soft-computing category.
For the problem of designing the SQOPDC controllers of the TVTSFMS under the criterion of minimizing a performance index. But, the LMI-based approaches8–14 cannot be applied to find the SQOPDC controllers of the TVTSFMS under the criterion of directly minimizing a performance index. In addition, though the genetic algorithms can solve the complex static-optimization problems that are not easy to analyze mathematically, it is also very difficult to only use the genetic algorithms to solve the dynamic-optimization problem of designing the SQOPDC controllers of the TVTSFMS. Hence, summing up the above statements and reasons, we can see that it is worth while to present a complementarily integrative approach fusing the HTGA, the LMI-based SC to find the SQOPDC controllers of the TVTSFMS under the criterion of minimizing a performance index.
Illustrative examples
Consider a vibratory pendulum system (Figure 2),
21
which can be represented by a two-rule TVTSFMS: Vibratory pendulum system.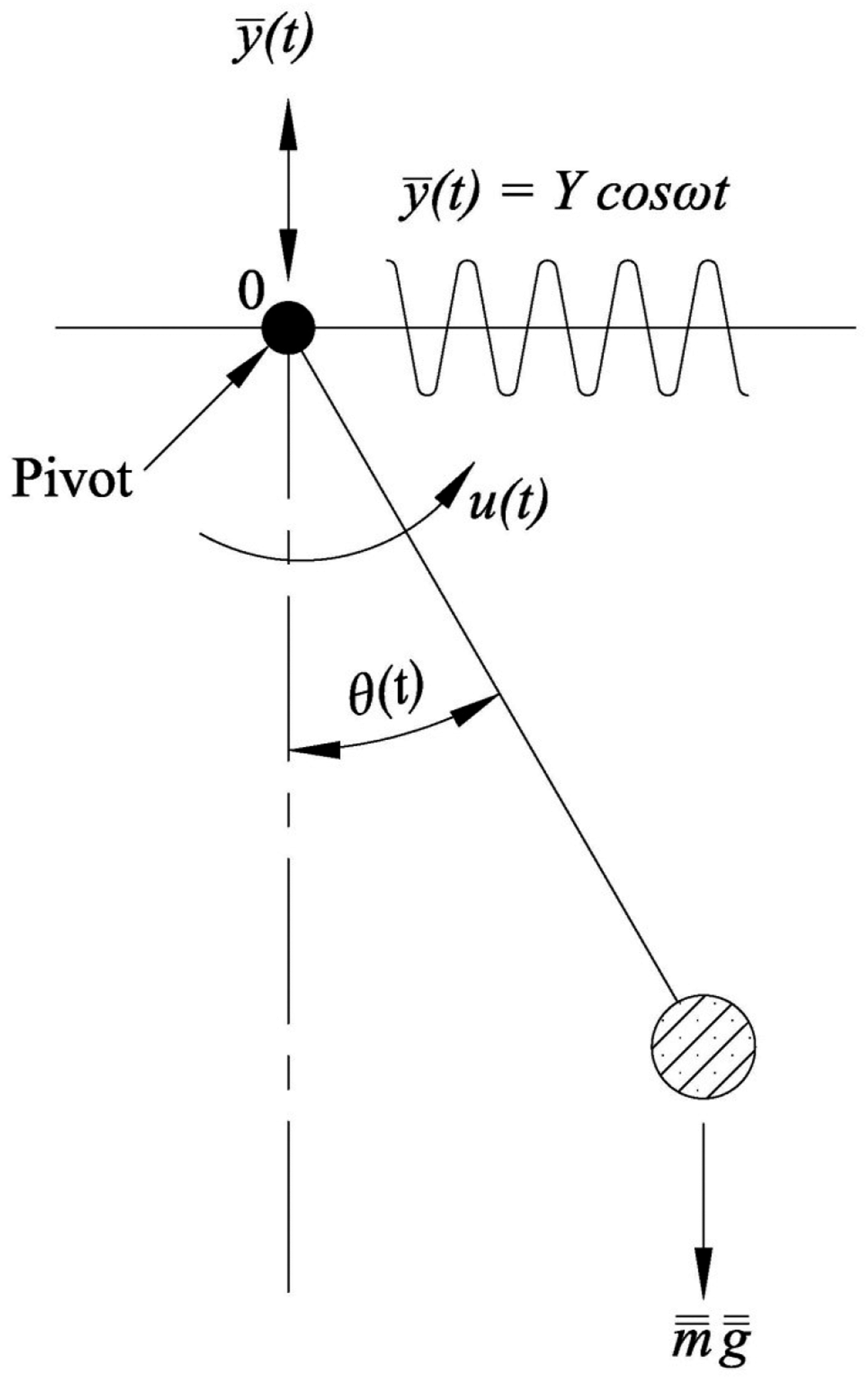


In equation (17), the proposed complementary computational approach is used to design the SQOPDC controller, to obtain a symmetric positive definite matrix P in equation (4), and to minimize J in equation (16). The OF type considered in this case was the Legendre function.
Results of performance comparison of hybrid Taguchi genetic algorithm and traditional genetic algorithm.

HTGA: hybrid Taguchi genetic algorithm; TGA: traditional genetic algorithm
Table 1 and Figure 3 show the results of the performance comparisons of the HTGA and TGA. Compared to the TGA, the HTGA had (i) superior average and median performance indices, (ii) smaller SDs in performance indices, and (iii) superior convergence. Accordingly, HTGA yielded and more stable solutions. Therefore, compared with TGA, the HTGA is more effective for routine use in designing an SQOPDC controller. Convergence performance comparison of hybrid Taguchi genetic algorithm and traditional genetic algorithm.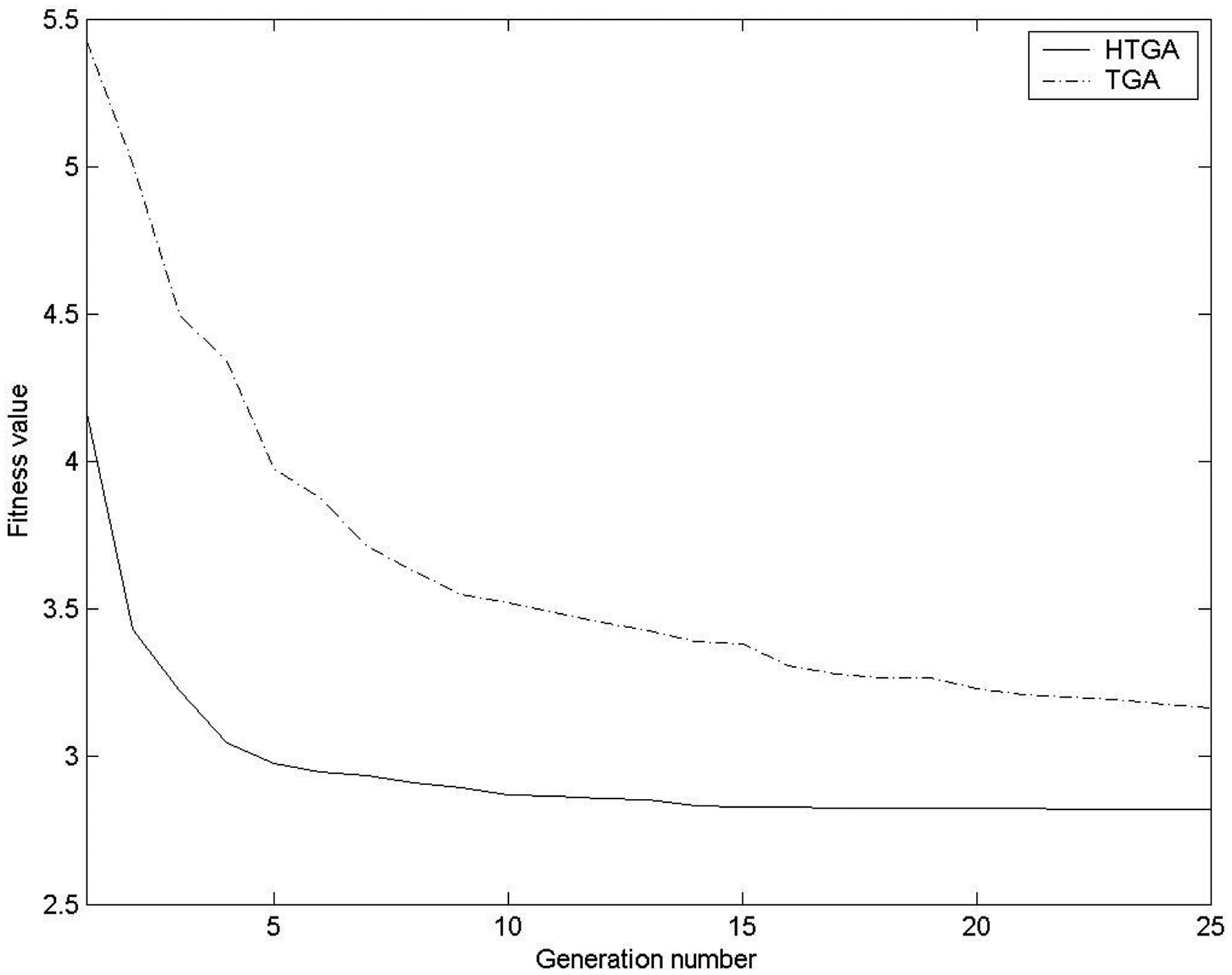
Figure 4 shows the The The 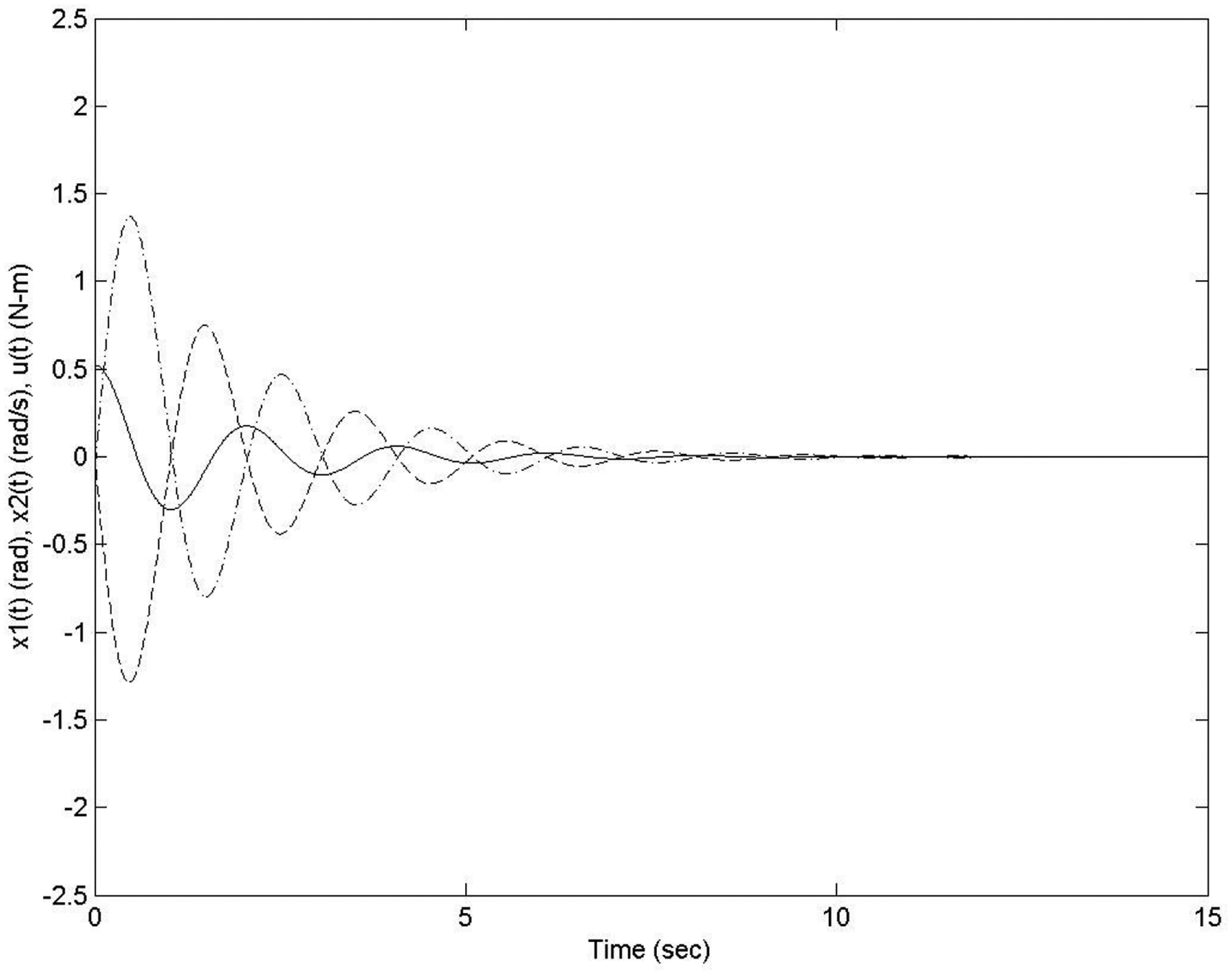
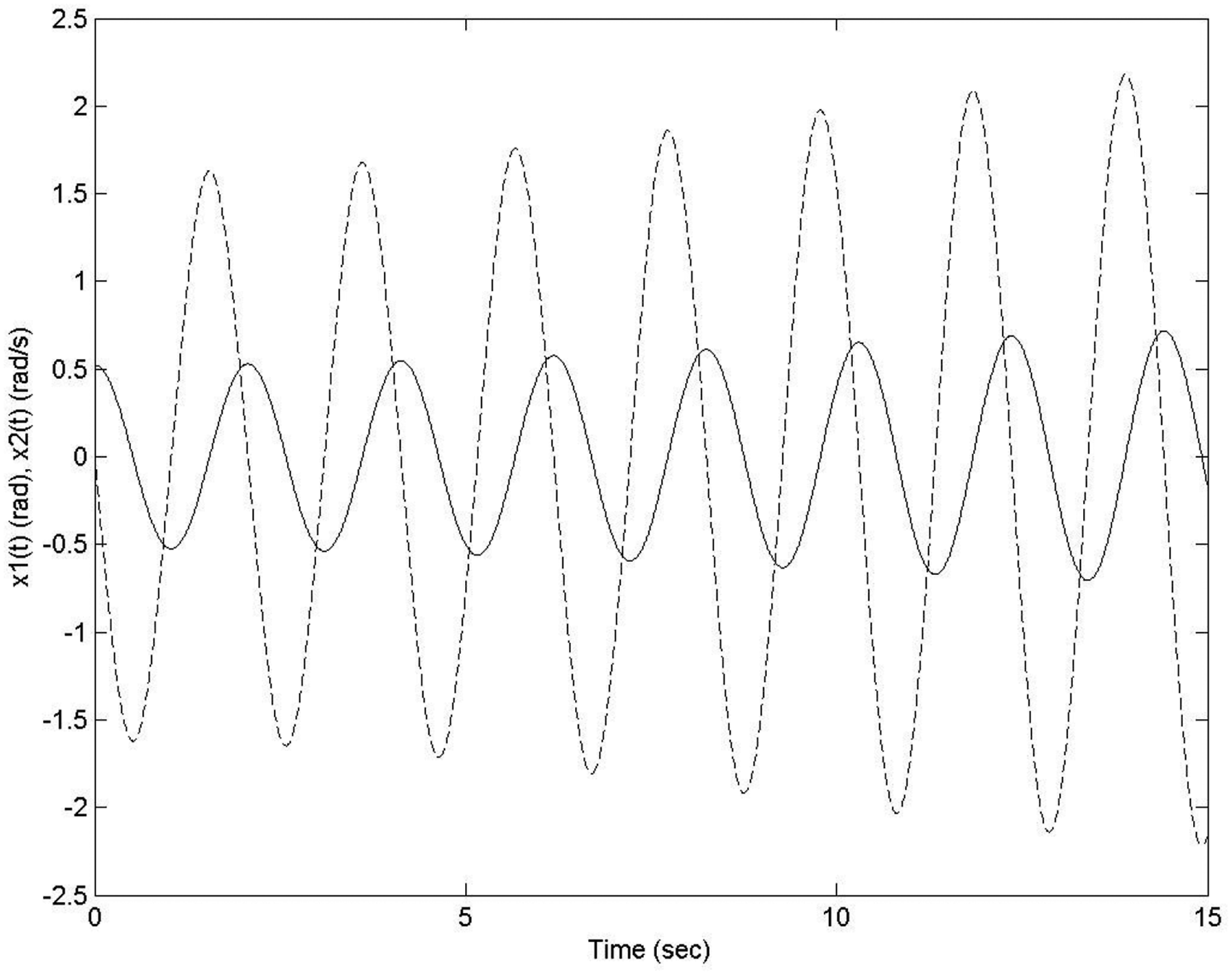
Figures 4 and 5 and the above results confirm that, by integrating OFA, HTGA, and LMI, the proposed complementary computational approach effectively stabilized the TVTSFMS, minimized the performance index, and achieved a satisfactory control effect.
Conclusions
This study developed an algebraic algorithm for using OFA to solve a TVTSFMS controller design problem. An algebraic algorithm was integrated in HTGA to design an SQOPDC controller for a TVTSFMS constrained by LMIs to minimize the performance index. The OFA was also used to convert the performance index to algebraic form. Application of the proposed approach in the design of a vibratory pendulum system verified the effectiveness of the approach for designing the SQOPDC controller for the TVTSFMS.
Footnotes
Acknowledgements
The authors of this study would like to express their gratitude to Professor Jyh-Horng Chou (Department of Electrical Engineering, National Kaohsiung University of Science and Technology, Kaohsiung, Taiwan) for his constructive suggestions and guidance in this research. The authors also thank to the “Intelligent Manufacturing Research Center” (iMRC) from the Featured Areas Research Center Program within the framework of the Higher Education Sprout Project by the Ministry of Education (MOE) in Taiwan, R.O.C.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Ministry of Science and Technology, Taiwan, R.O.C., under Grant Number MOST 109-2221-E-037-005.
Appendix
Proof of Theorem
Since (i) time-varying elements
The TVTSFMS in equation (19) can then be rewritten as
The
Equation (19) then becomes
For the specified feedback gain matrices