
Abstract
Battery is the core equipment of the electrical vehicle (EV), battery life, and performance are critical to EV. Only motor variables are considered in most model predictive control (MPC) strategy in which battery indexes are neglected. A model predictive speed control (MPSC) strategy with adjustable C-rate of battery is proposed in this paper on EV with permanent magnet synchronous machine (PMSM). The rest capacity of battery is involved in the cost function, and the operating speed is related to the rest capacity of battery which adjusts the C-rate of the discharging currents further to protect battery. As the EV runs, the C-rate is decreased step by step according to the improved cost function, and the energy is saved to prolong mileage. The benefits of the proposed method including discharging capacities and operating mileage are corroborated by the simulation and repetitive experimental results under same conditions.
Keywords
Introduction
The vehicle has been widely recognized as a promising remedy for the environmental crisis and fuel storage which causes greenhouse gas emission and is faced by modern metropolises for a long time.1,2 Electric vehicle (EV) is a solution to ease this problem. There are several types of EV in the market including the battery EV, the series plug-in hybrid EV, the parallel plug-in hybrid EV and the conventional internal combustion engine, and electricity is the main energy source in the first three types of EV. Combining parts of EV are shown in Figure 1 where the inverter with motor and the Lithium-ion battery are critical. 3 These three parts construct the electrical control system of EV as shown in Figure 2. The performances of EV are determined by battery life, capacity, and motor operating and control performances. Since permanent magnet synchronous motor (PMSM) and Li-ion battery are increasingly applied in EV because of their advantages such as light weight, small volume, and high power density, most resent researches of EV are based on these devices and their operating characteristics. 4
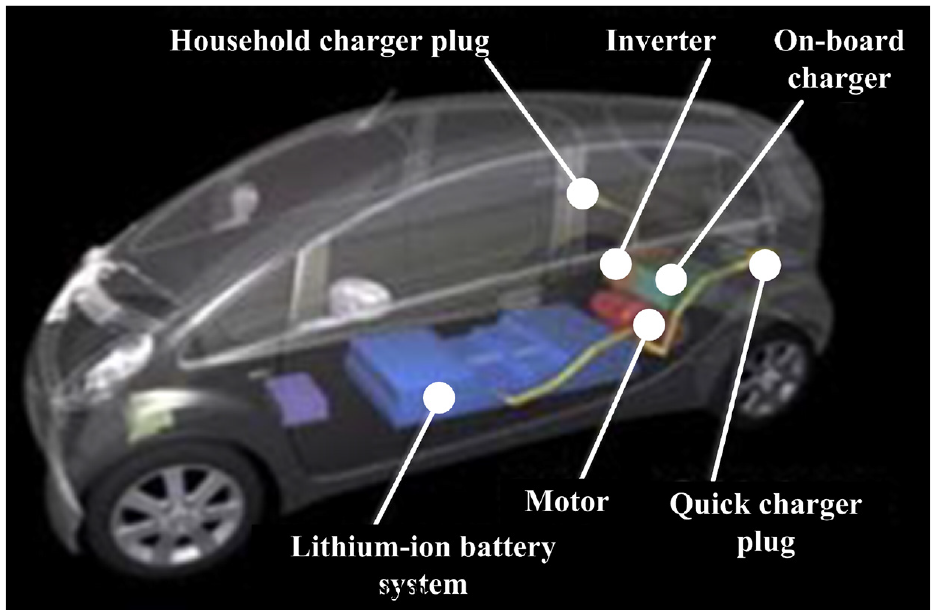
Combining parts of the EV (Mitsubishi i-MIEV). 3
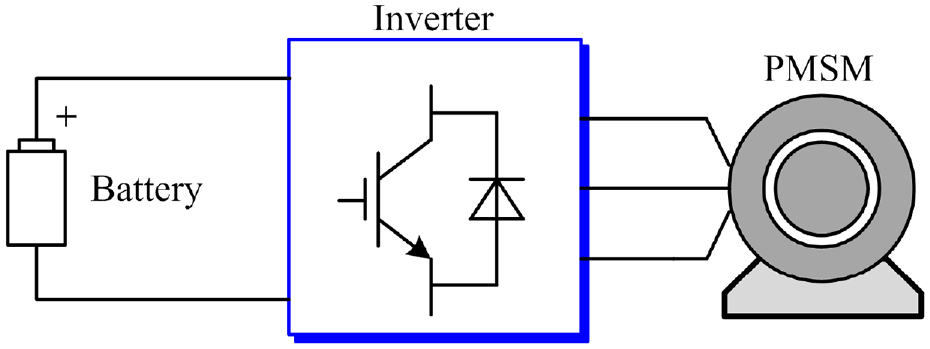
Main structure of electronic control system for EV.
For PMSM control strategy, the proportion-integral (PI) controller has been widely used because of the simple structure and easy realization. However, the limitation of the bandwidth causes that the rapidity and the stability of the control system cannot be ensured at the same time.5,6 Model predictive control (MPC) is highlighted by researchers and engineers because of easy handing, high dynamics and less tuning parameters with multiple controlled objectives. 7 The conventional MPC has been applied in power electronic realm to improve performance and has been generated to suit different topologies and environments such as high power generation8,9 and motor driving10,11 et al.
The linear cost function including the controlled objectives of EV in MPC has been restricted by the predictive horizon which equals one sampling period of the system. 7 The cost function of nonlinear MPC (NMPC) is improved as a nonlinear accumulation type with different prediction horizons, 12 and inserted into control system of different types of EV to enhance the traction performance.13,14 Moreover, the structure and the cost function of the NMPC have been improved. One optimal cost function of NMPC with more weighting factors to enhance the convergence of system, 15 and another NMPC with the linear parameter varying model has been presented and the EV dynamic with bias term has been tested. 16 The limitation of predictive horizon in MPC has been conquered in NMPC and extended to several sampling periods. A constant value NP has been applied to express the number of predictive sampling periods which equals 1 + 2+ … + Np, and Np has been improved as a discrete-time variable Np(k) to further enhance the dynamics.17,18
The Lithium-ion battery is the core part of the EV because it saves all of energy of the EV. The state of capacity (SOC) is an important index which reflects the rest capacity of the battery and the mileage of EV. Most of researches focus on charging process, such as charging speed, cycling life, and depth of charging.19,20 The operating of EV is powered by the discharging of battery. Only a few studies focus on the discharge process, and major of them aim at the improvements of battery management system (BMS) and discharging characteristics of battery, such as discharging power management of vehicle to grid (V2G) technology by genetic algorithm in Mao et al. 21 and multi-objective optimization methods in Mao et al. 22
The PMSM control system has three main types including model predictive current control (MPCC), model predictive speed control (MPSC), and model predictive torque control (MPTC).7,23,24 A MPSC for PMSM and Lithium-ion cell EV system with adjustable C-rate has been presented in this paper to prolong mileage and protect battery. SOC has been selected as an index and inserted into the cost function to adjust the C-rate and to prevent over-discharge of the battery. The improved cost function for the proposed MPSC obtains increased middle plateau region of voltage and depth of discharging to prolong mileage. The effectiveness and above-mentioned advantages of the proposed method for the operating EV at low battery capacity state have been demonstrated by the simulation and experimental results.
Basic principles of lithium-ion cell and MPSC
Performance influences of lithium-ion cell
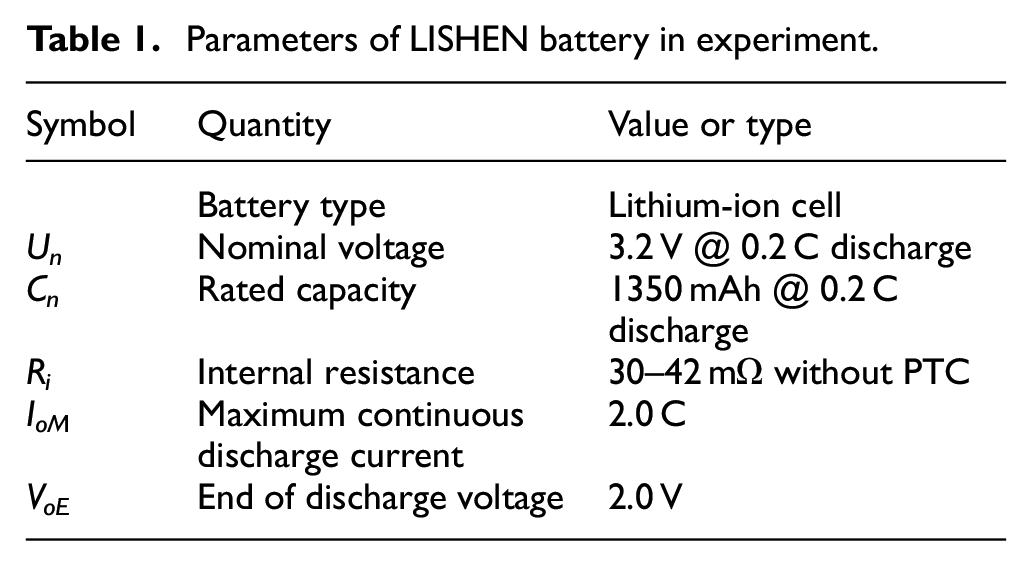
The Lithium-ion Batteries have many operating performance influence factors such as capacity, discharging voltage and current, discharging type, environmental temperature, et al. The research in this paper is based on (LISHEN Cylindrical Nickle Steel Lithium Ion Cell-18650). Main parameters of Lithium-ion cell are summarized and listed in Table 1.
Parameters of LISHEN battery in experiment.
Discharging voltage (Closed-loop voltage)
Typical and ideal discharging voltage waves of battery are shown in Figure 3. The discharging voltage is decreased with the increasing of inner resistance (IR) of the lithium-ion cell.
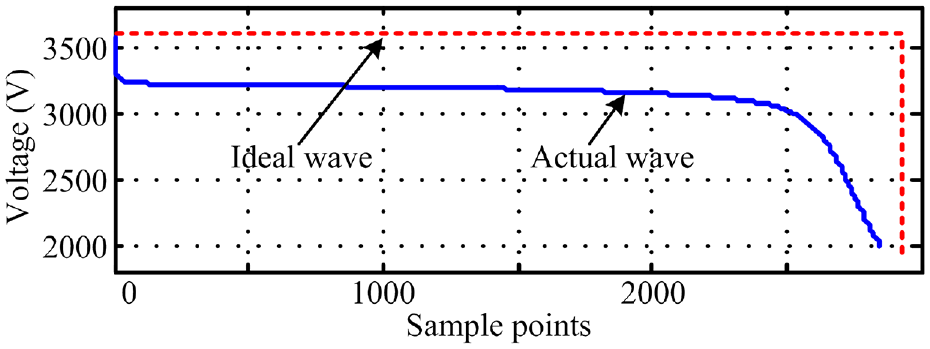
Experimental discharging voltage waveform of battery.
Discharging current
As the discharging current grows up, the voltage drop over IR is increased, as a result, the discharging voltage and operating time are both decreased. A variable named C-rate is used to reflect the charging/discharging current which is defined as:

where Id is the discharging current, C is the rated value of battery capacity, n is the time in which the nominal capacity can be fully discharged, and M is the multiple of C.
Figure 4 shows the tendency of C-rates with discharging currents where n equals to 1 and M equals to 0.5, 1, 1.5, and 2 respectively in the figure.
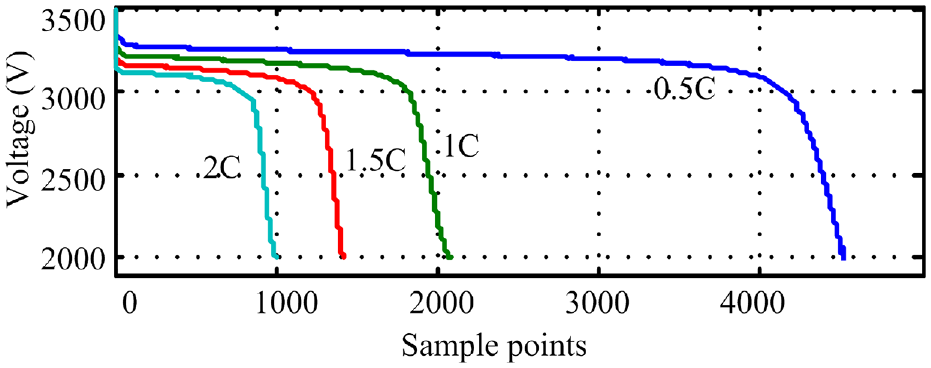
Experimental discharging voltage waveforms with different C-rates of battery.
Discharging type
The discharging type has three basic types: discharging with constant resistance, constant current, or constant power respectively.
The battery voltage and current drop with the same tend when the battery operating at the constant resistance type. The output power drops faster than voltage and current, as it is proportional to the square of battery voltage or current. The initial discharging current will be relatively large at the beginning of discharge to ensure required output power at the terminating voltage of the battery. So the battery life is short.
The discharging current is constant when the battery operating at the constant current type. The discharging current and output power are lower comparing with the constant resistance type, and the life of the battery will become longer.
The resistance needs to be adjusted carefully to increase the discharging current when the battery voltage decreased at the constant power discharge type. The average value of the discharging current is the lowest and the battery life is the longest comparing with the other two discharging types.
PMSM discrete-time model
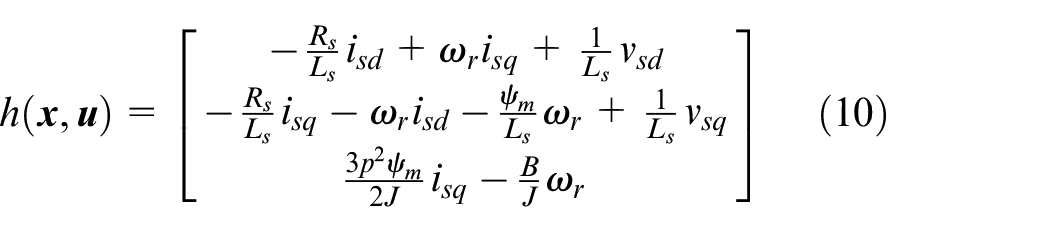
The model of PMSM has three groups of expressions having stator voltage, stator flux linkage, and electromagnetic torque. The stator voltage vsd and vsq expressions in dq coordinate are:

the expressions of stator flux ψsd and ψsq in dq coordinate are:

and the expression of electromagnetic torque Te is:

where Rs is the stator resistance, ωr is the rotor speed, ψm is the rotor permanent magnet flux linkage, and p is the number of pole-pairs. Moreover, the variables of Lsd and Lsq are the stator inductions at d-axis and q-axis, and isd and isq are the stator currents at d-axis and q-axis respectively
The values of Lsd and Lsq are same when the permanent magnet of PMSM is the surface structure. The expression in (4) can be simplified as:

and the state expression of motor speed can be formulated as:

where TL is the load torque, J is the inertia coefficient, and B is the viscosity coefficient of the surface PMSM respectively.
Two-step Euler interpolation method is applied to discrete and to predict the state variables of PMSM at time k + 1. The expressions of two-step Euler can be expressed as:

where Ts is sampling period. Substitute PMSM model into (7), the discrete-time model and predictive variables of PMSM are:


Conventional MPSC strategy
Control strategy
Cost function in the conventional MPSC strategy has two controlled objectives including speed reference tracking and current ampere optimization, which can be expressed as:

where ωr* is the speed reference signal, λω and λi are weighting factors reflecting importance of objectives. The first term evaluates the predicted speed error equaling zero, and the second term minimizes d-axis current for optimized torque by ampere ratio.
Furthermore, the current magnitude limitation and electrical torque smooth behavior can be seen as objectives and inserted to the cost function to improve performance. The cost function with these objectives can be expressed as following:
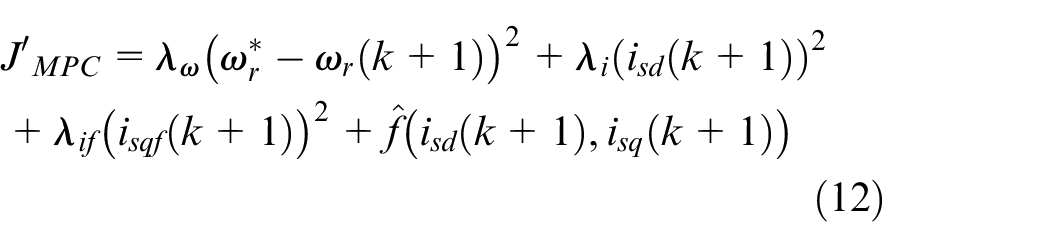
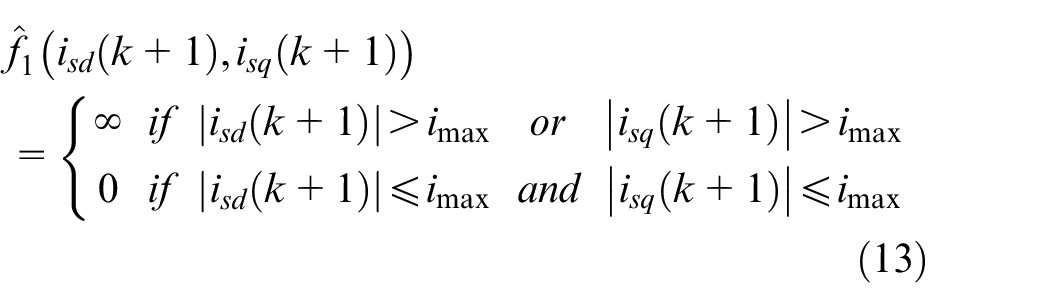
where λif are the weighting factor for the third term which evaluates the filtered value of the q-axis current by high-pass filter. The last term is a nonlinear function for limiting the amplitude of the stator currents and defined as 7 :
DC-side influences
The conventional control strategy is designed to improve motor performance only, and not considering with DC-side. The stator currents can be adjusted by the third and fourth terms in (7), and affected DC current indirectly due to:

where I and Id are the RMS of fundamental current and the DC current, kμ is a constant about 0.995. Therefore, the ripple and overshoot of DC current are limited to satisfy the requirement of the battery by the third and fourth terms.
Simulation results
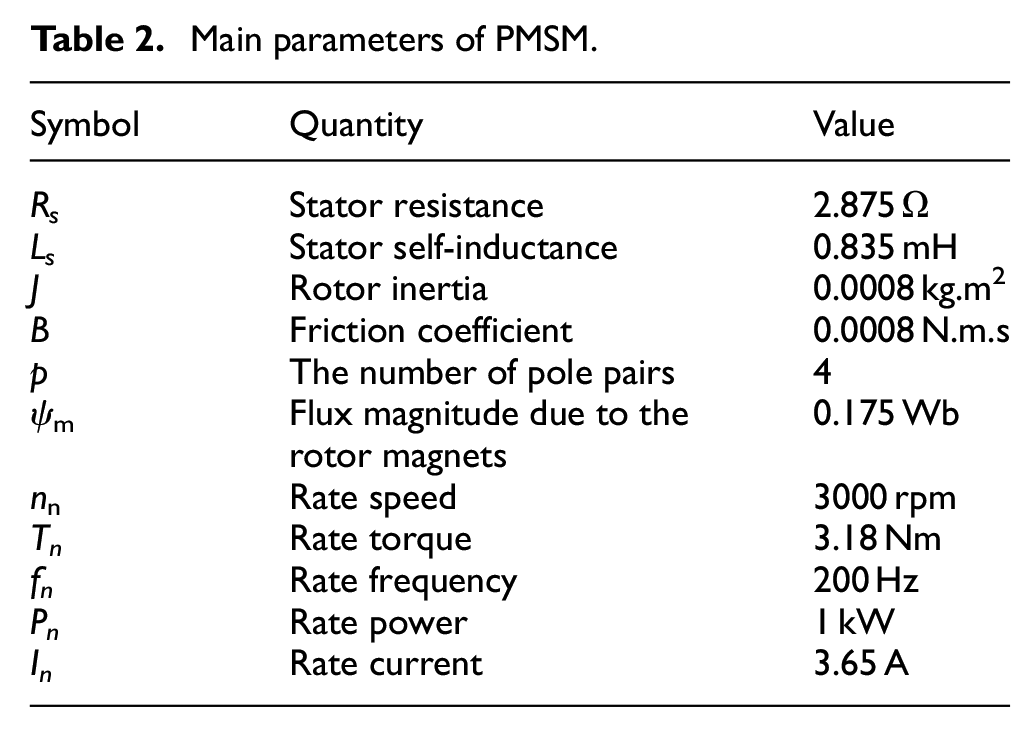
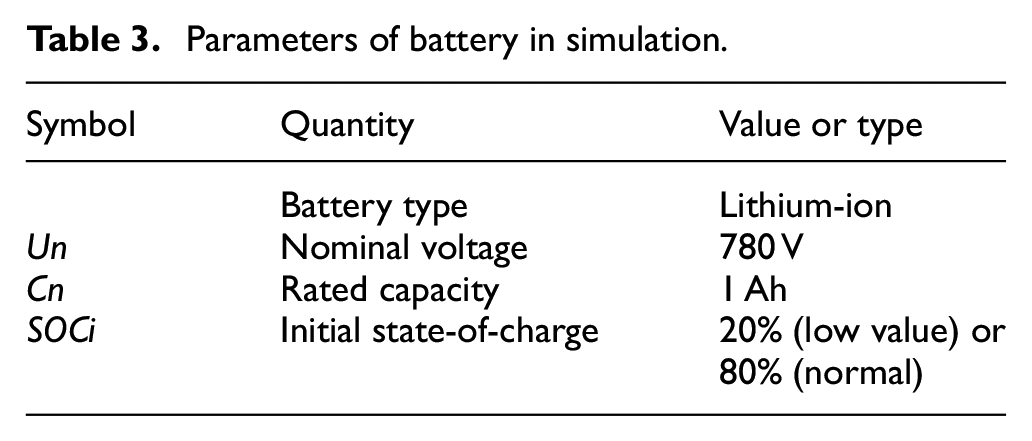
Simulation environment has been built in the MATLAB software and Simulink toolbox. A battery is adopted as power supply, the main parameters of the battery and PMSM in simulations have been summarized in Table 2 and Table 3, and the structure of simulation is plotted in Figure 5. The operating state with low capacity of battery is selected with initial SOC of 20.1% to realize fast discharge. The reference speed is set to 950 rpm and decreased to zero when the SOC released to 20% to prevent over-discharging.
Main parameters of PMSM.
Parameters of battery in simulation.
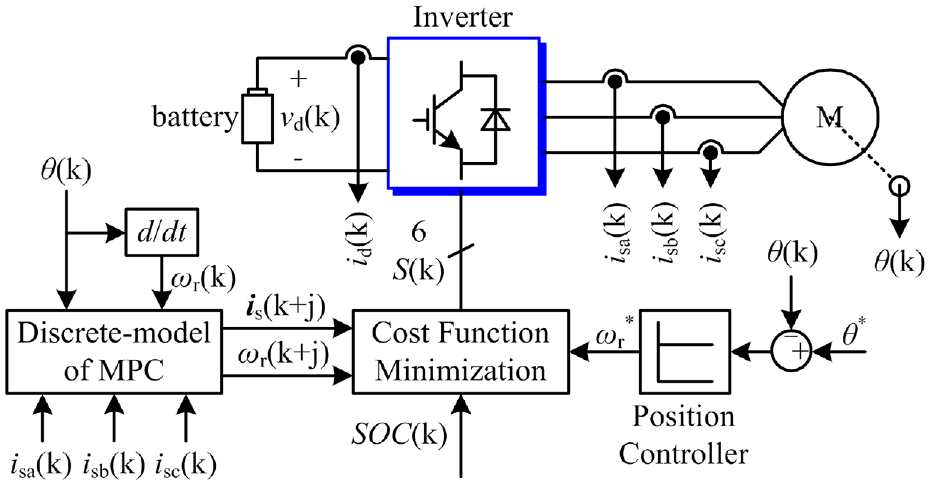
Structure of the proposed MPSC.
The tracking speed, battery current, and battery voltage waves with rated load torque are shown in Figures 6 and 7 respectively. As shown in the figure, from start time, the speed reference is 950 rpm. As the EV runs, the SOC decreased to 20% at about 1.67 s and the reference speed decreases to zero. The battery discharging current is decreased to zero to prevent over-discharging and voltage is increased. The operating mileage is about 26.442 m.
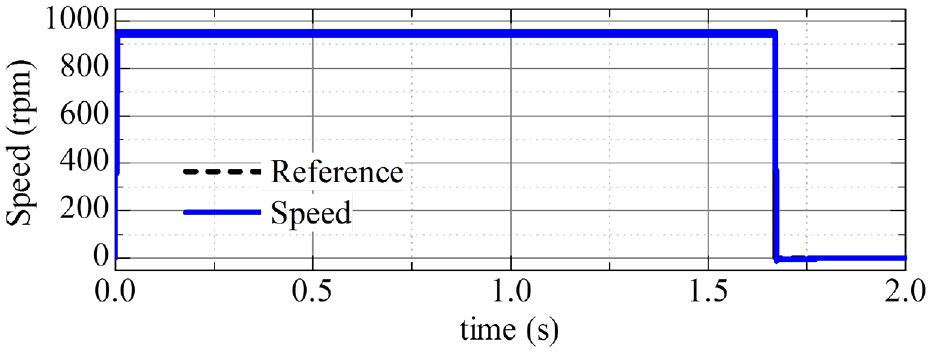
Waveforms of reference and speed for the conventional method.
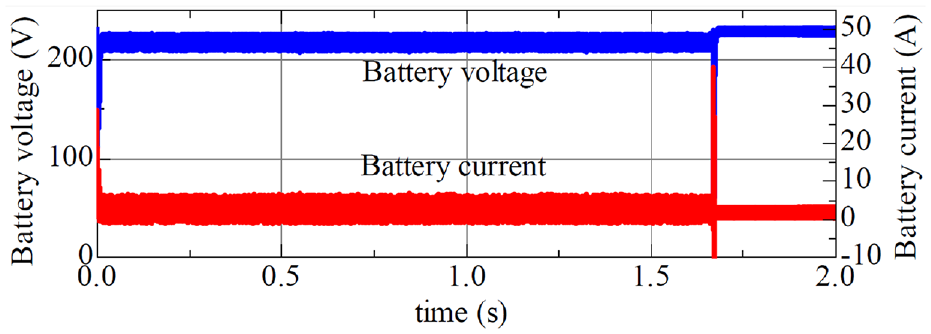
Waveforms of battery current and voltage for the conventional method.
Proposed MPSC
Control strategy
In order to realize the adjustable C-rate to prolong mileage during low capacity stage, a nonlinear function is selected as a controlled objective and combined with the cost function in (12). The summarized cost function is expressed as:
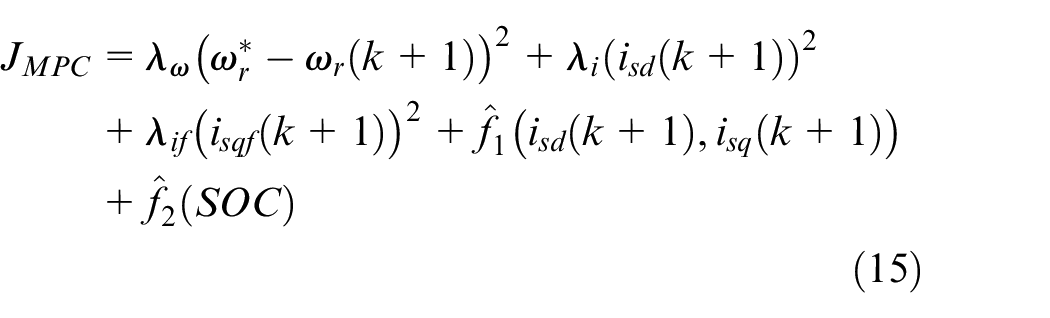
where the last term of the cost function represents the nonlinear cost function for adjusting C-rate which can be defined as:
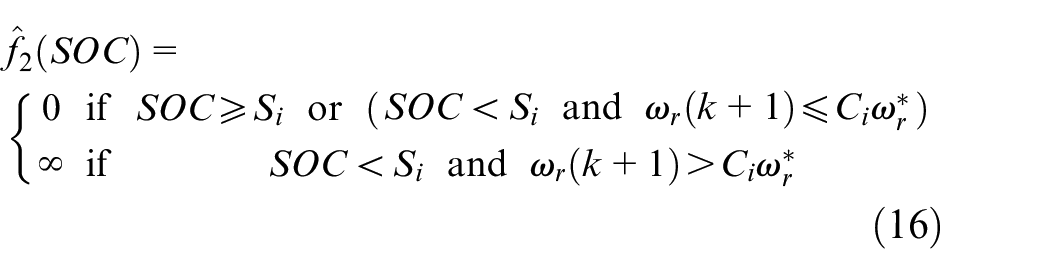
where the Si is a group of thresholds by which the battery capacity can be divided into several stages, and Ci is a group of coefficients to adjust C-rate within different capacity stages. i is the stage number of the low capacity. A larger number of i means more detailed division and better transient processes to improve efficiency.
Simulation results
The thresholds and coefficients for the nonlinear function in (11) are selected as Si = [20.08, 20.05, 20.02] and Ci = [0.9474, 0.8947, 0.8421] respectively, and the weighting factors are tuned by the branch and bound algorithm which can reduce the number of simulations required to obtain suitable weighting factors. 7 The tracking performance is shown in Figure 8. As shown in the figure, the reference signal has four decreasing steps with different SOCs, and the speed can track the reference successfully. The speed is enlarged at 0.5 s and shown in Figure 8(b).
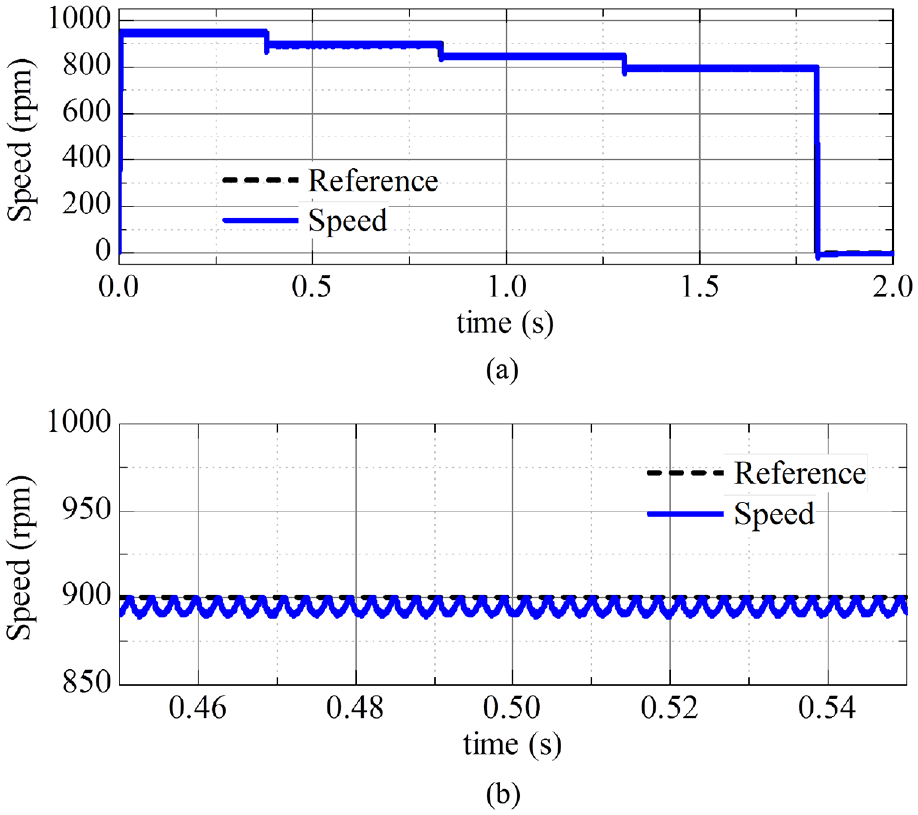
Speed waveforms for the proposed method: (a) global waveform and (b) enlarged waveform at 0.5 s.
The current and voltage of the battery are shown in the Figure 9. As shown in the figure, four steps generate four transient processes to adjust C-rate. Some extra energy is released to pass transient states.
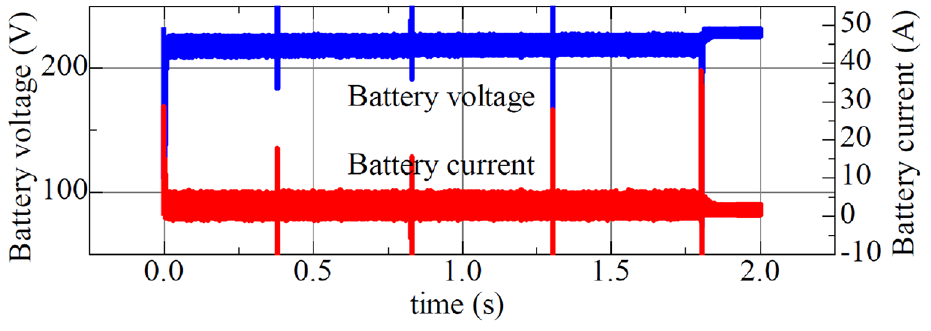
Battery current and voltage waveforms for the proposed method.
An area graph for the proposed method and the conventional method are shown in the Figure 10. It is shown that the red area which is circled by dash line is named as A-area equals about 37.17 rad of the rotor angle, and the magenta area is named as B-area equals about 36.22 rad. The prolong mileage of the proposed method is that A-area subtracts B-area, which is prolonged about 0.95 rad during low capacity stage.
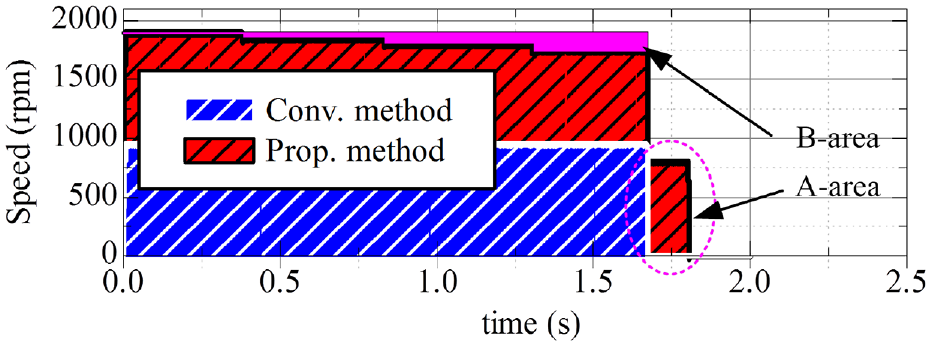
Area graph of speed waves.
Experimental results
Groups of batteries (LISHEN Cylindrical Nickle Steel Lithium Ion Cell-18650) have been used in the system and the parameters of a single battery are summarized in Table 1. Besides, the parameters of PMSM are same with Table 3. The Sigma Point Kalman Filter (SPKF) SOC measurement method in 25 is applied in the experiments, and the estimation error wave during operating process is shown in Figure 11.
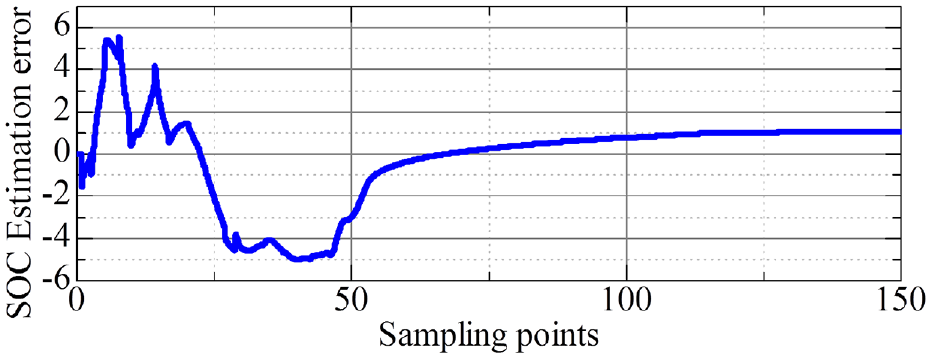
Estimation error during start stage.
The experimental platform includes two parts: test part of battery performance in Figure 12 and test part of PMSM performance in Figure 13. A Lithium-ion charge/discharge test platform (DEKANG DT50W-16) and a thermometer -hygrometer are combined with the former part to measure performance of the battery. The later part includes a 1 kW PMSM (INOVANCE ISMH2-10C30CD) with an incremental encoder (INOVANCE EI34H), a three-phase inverter with IGBTs (FGL35N120FTD), a DSP (TMS320F2812PGFA), and a CPLD (EPM240T100I5N) to combine the control and main circuit. The SPKF SOC measurement method is adopted to measure SOC and sent to control strategy.

Lithium-ion battery setup.
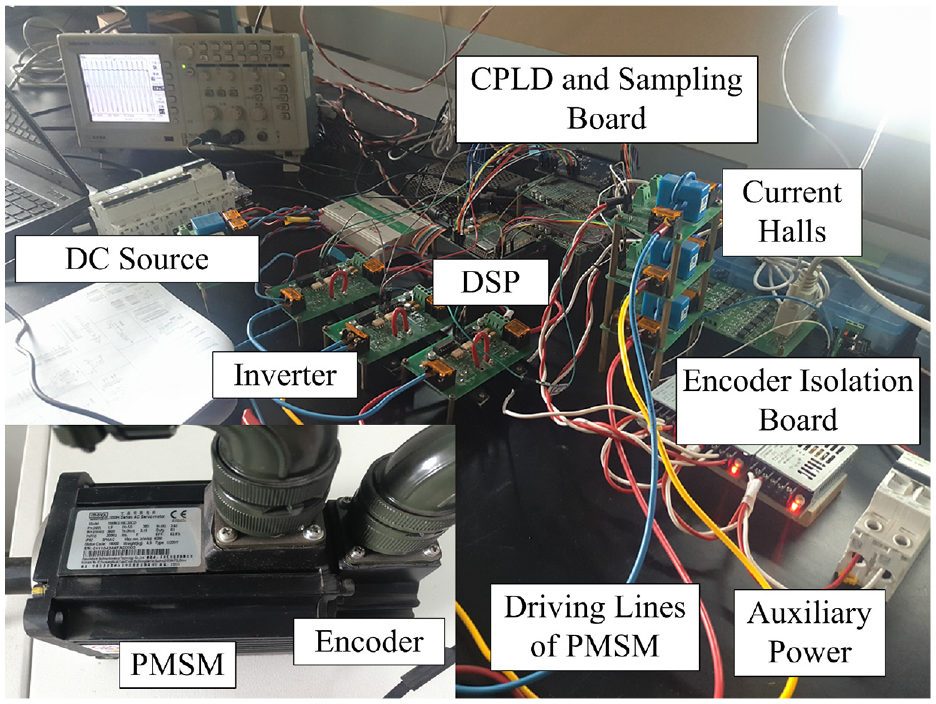
PMSM performance test platform with driving batteries.
Eliminating chance
In order to eliminate the chance of the battery, four groups of batteries named as C1, C2, C3, and C4 are used to verify the performances. The discharging capacities of batteries for the conventional method and proposed method had been measured and summarized in Figure 14. The maximal capacities of each group had been measured under the rated discharging current (0.5 C). Each group’s discharging capacities for the proposed method are extended about 49, 97, 70, and 136 mAh respectively.
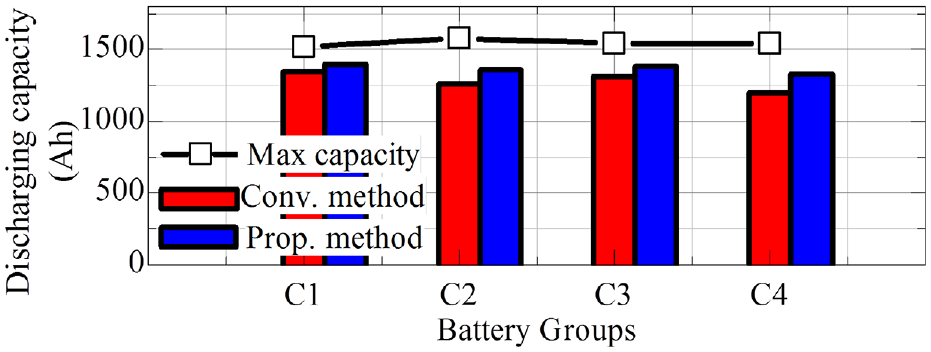
Experimental results of accumulated discharging capacities of four group batteries from Lithium-ion performance test setup.
The experimental battery voltage and current waves of four groups are shown in the Figures 15 and 16 respectively. The figure shows that the waveforms of four group batteries have similar tendencies. The voltage waves of the proposed method have some small spikes at the shift points of SOC, and the current waves are increased to zero which can be observed by the enlarged waves easily. This phenomenon is observed because the discharging current of the battery setup needs to be reset to zero when the SOC reaches the thresholds and an operating step is finished.
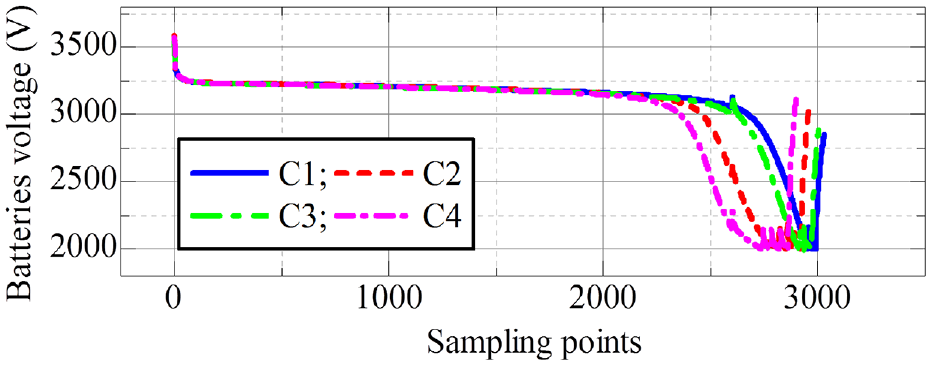
Experimental waveforms of battery voltages.
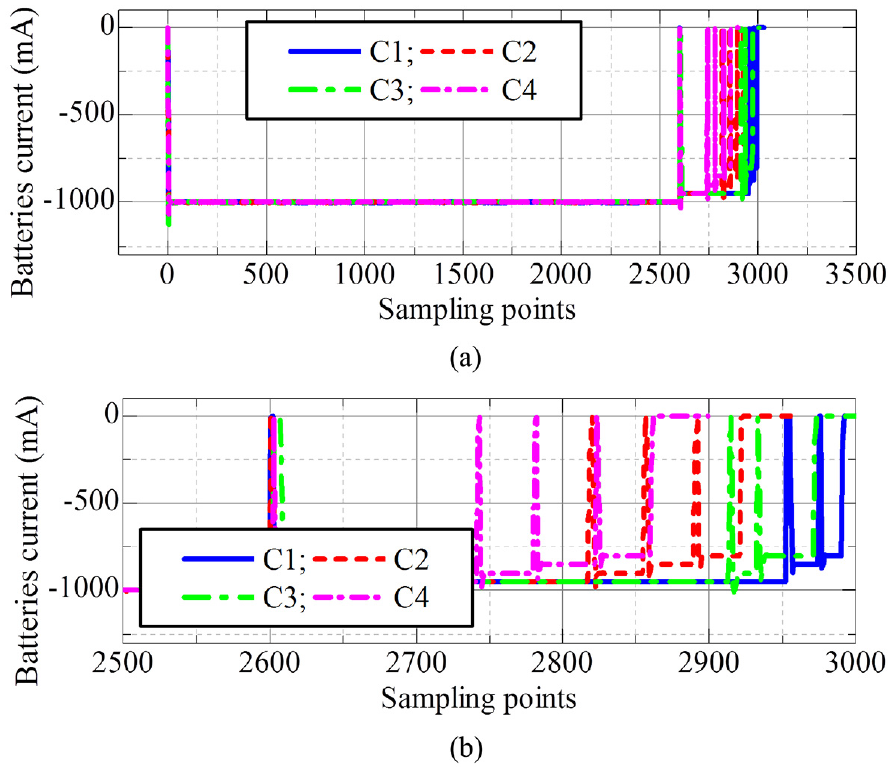
Experimental waveforms of battery current: (a) global waves and (b) part enlarged waves.
The discharging capacity waves are shown in Figure 17(a) and part enlarged waves at stop operation stage are shown in Figure 17(b). The waves are a group of increasing lines nearly because the slopes are influenced by the C-rates which does not change obviously during normal operating process before the battery reach to a lower SOC stage. The batteries stop releasing energy when the SOC reaches to 20% to prevent over-discharge.
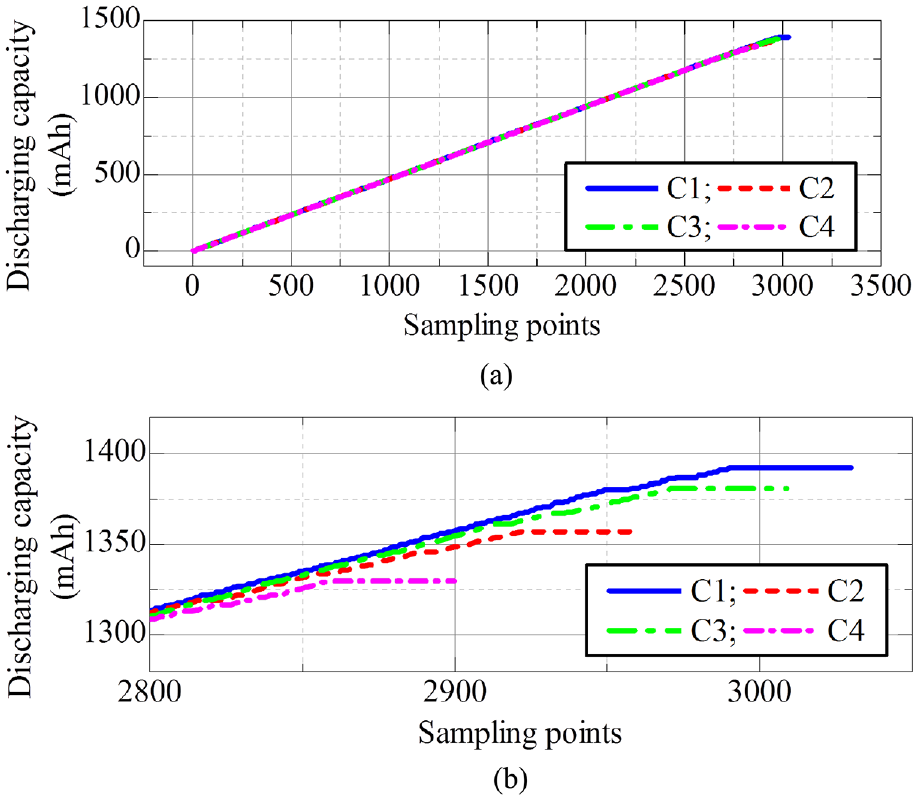
Experimental waveforms of battery capacity: (a) global waves and (b) part enlarged waves.
The four groups of batteries have similar current, voltage and capacity operating tendencies, and the chance is eliminated by the repetitive experiments for the proposed method.
Performance comparison for single group battery
Experimental results of C2 are used to exhibit the performance. For the proposed method, the discharging capacity is about 1357 mAh and the conventional method is about 1260 mAh which are shown in Figure 18, and more energy is used to drive motor to prolong mileage.
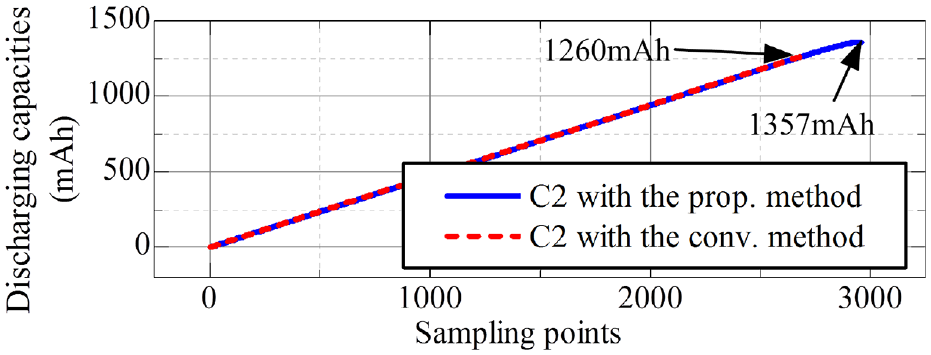
Experimental waveforms of battery capacity for two methods.
The battery current and voltage waves are shown in the Figures 19 and 20 respectively. The voltage wave for the proposed method shows that the middle plateau region is prolonged to suit for operating EV. The sampling points for the proposed method are 278 points more than the conventional method, which means that the system prolong operation time about 9.267 min and released 97 mAh.
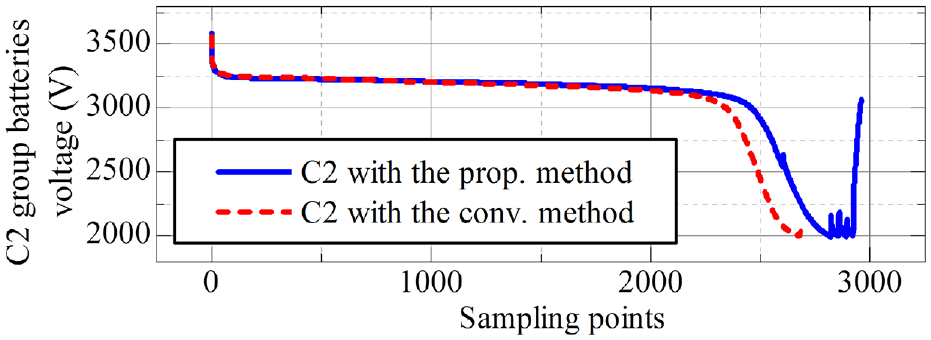
Experimental waveforms of discharging voltage.
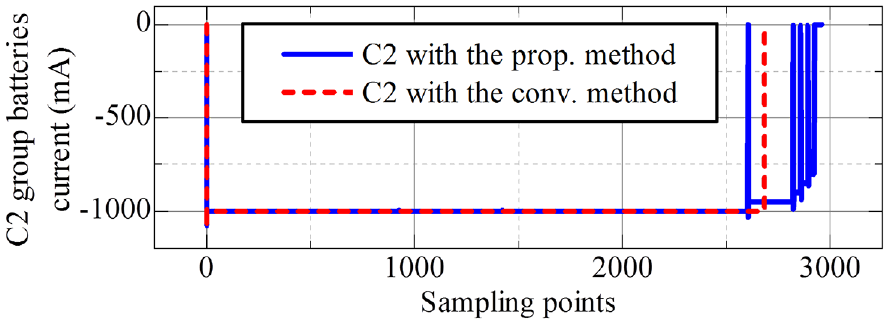
Experimental waveforms of discharging currents.
A programing power supply is used to simulate the performance of battery to drive the PMSM. The current at the middle plateau region for proposed method is shown in the Figure 21, and the current at low capacity stage is shown in Figure 22. As shown in the figure, the current ripple is decreased during the operating state, which is much smaller than simulation due to parasitic parameters and on-off time of the switches. The current is decreased to zero quickly when the SOC decreased to 20% to prevent over-discharging, and the spikes in the Figure 20 are become unobvious.
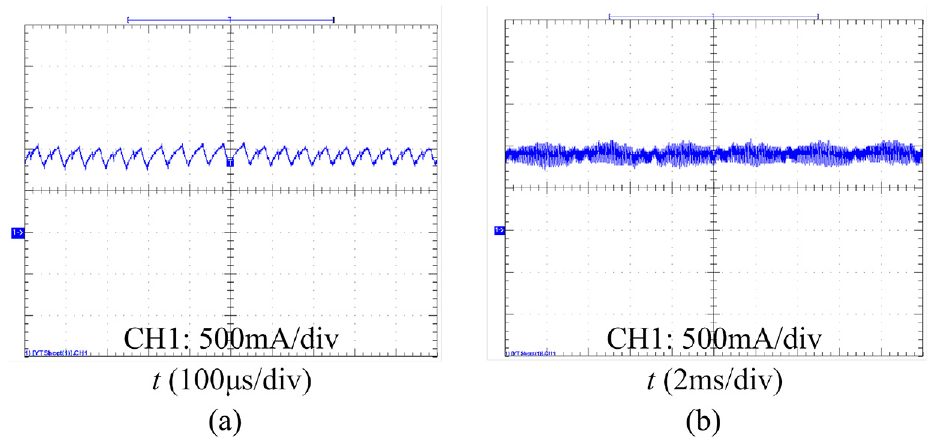
Experimental waveforms of discharging current of battery at the middle plateau region: (a) part enlarged wave and (b) global wave.
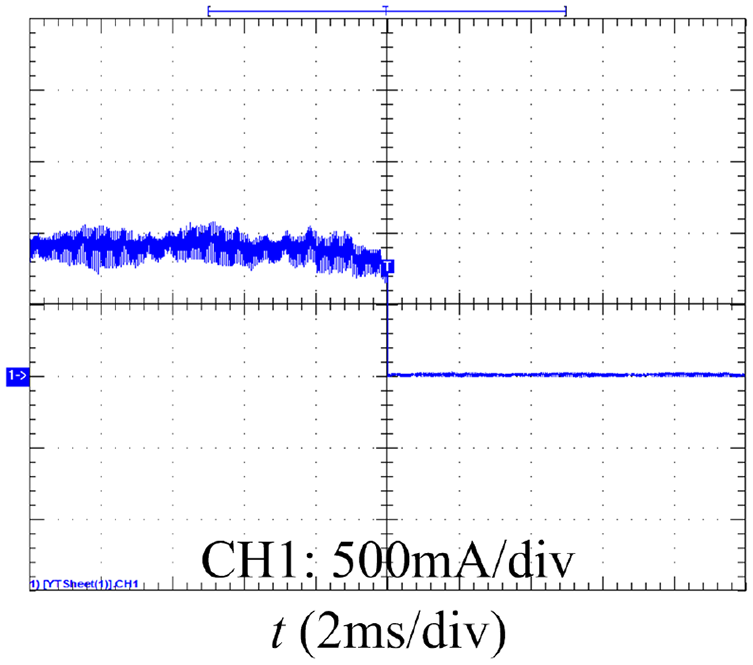
Experimental waveforms of discharging current of battery at the low capacity stage.
Conclusion
The battery discharging types and variables with the conventional MPSC strategy are introduced in this paper, and a MPSC with adjustable C-rate for EV with PMSM to prolong operating mileage and protect battery is proposed. The battery capacity is divided into four stages, and the C-rate is adjusted during different SOCs. The performances of the proposed method are analyzed by the simulation and experimental results. The battery chance is eliminated by the repetitive experiments. The discharging capacity for the proposed method is increased about 7.148% and the operating mileage is increased about 2.556% comparing with the conventional method. The performance could be further improved if the battery setup needs not to reset when an operating step is finished, or if the step-dropped C-rate changes as a decreasing slope C-rate which can eliminate the extra discharging capacity during transients.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Postgraduate Innovation Research Assistant Support Project of Hebei Province under Grant CXZS201907, in part by the Key Project of Science and Technology Program for Colleges and Universities of Hebei Provincial Education Department under Grant, and in part by the Youth Fund Project of Science and Technology Program for Colleges and Universities of Hebei Provincial Education Department under Grant QN2018134.