
Abstract
The guaranteed cost synchronization control for discrete-time second-order leader-following multi-node networks with varying transmission topologies and cost limitations is investigated. First, the control law and its cost function are proposed to balance the tradeoff between the synchronization regulation and the control cost. Then, we derive the sufficient conditions without cost limitations to achieve guaranteed cost synchronization with varying transmission topologies, where the dimensions of matrix variables do not rely on the number of nodes. In addition, we calculate an upper bound on the cost consumption index, which is a function of the initial conditions. Moreover, guaranteed cost synchronization criteria are formulated for control with cost limitations, which are involved by establishing the relation between the cost limitation and the upper bound on the cost consumption index. Numerical simulation experiments were conducted to validate the theoretical results.
Introduction
As a basic problem in multi-node networks (MNNs), synchronization has received increasing attention mostly by its potential to handle problems such as multi-vehicle formation control,1–3 design of sensor networks,4–7 and rendezvous problems.8–10 Various node synchronization problems in MNNs have been addressed considering first- and second-order dynamics, where the transmission topology can be either leaderless or leader-following. In leader-following MNNs, the leader guides the motion of the whole network, and the followers should converge to the states of the leader by sharing information among nodes to realize synchronization control. To this end, a control law should be devised for all the followers to agree with the leader in some states as time proceeds.
Various studies have considered continuous-time nodes with first- and second-order dynamics.11–14 In Qin et al., 13 a sampled-data synchronization strategy was adopted for nodes modeled by double-integrator dynamics with both fixed and dynamic transmission topologies. In Xiao et al., 14 partial state synchronization problems were addressed for second-order MNNs, and an asynchronous distributed synchronization protocol with intermittent information transmission was proposed. Compared with the continuous-time approaches, the discrete control results may apply to more practical conditions; thus, the discrete control method should be studied further. In Qin et al., 15 You and Xie 16 and Hengster-Movric et al., 17 synchronization strategies for a number of nodes equipped with second-order discrete-time dynamics were introduced. In Li et al., 18 synchronization control for discrete-time leader-following MNNs was addressed considering a directed fixed topology and a limited transmission rate. Likewise, synchronization control problems of discrete-time MNNs were discussed considering the influence of time delays.19–21 In MNNs, the transmission topology usually varies due to link failures or other reasons. Therefore, switching transmission topologies should be handled for discrete-time WNN synchronization to optimize the performance of the whole network.
Most existing studies focus on synchronization problems for MNNs. However, the limited resources in real implementations should be considered while optimizing synchronization in MNNs. In Liu et al., 20 an optimal synchronization strategy was proposed for continuous- and discrete-time models with single-integrator dynamics. In Wang et al., 21 an optimal control algorithm based on minimization of an individual cost function by local states was proposed. In Guan et al., 22 Cheng and Ugrinovskii, 23 and Yu et al., 24 guaranteed performance synchronization for MNNs was addressed, but the control consumption cost was disregarded. Moreover, the synchronization performance index was not jointly considered with the control consumption cost for the synchronization strategies.22–25 Although guaranteed cost control problems were addressed for discrete-time isolated systems,26–28 these approaches cannot be directly used for guaranteed cost synchronization in MNNs. This problem was addressed in Xu et al., 29 where robust discrete-time guaranteed cost synchronization control for linear high-order MNNs containing time-varying delays was studied. Likewise, synchronization of guaranteed cost control for MNNs with parameter uncertainties was investigated in Ren and Zhang. 30 Although control consumption cost and synchronization regulation performance were considered,31–36 these studies neglected the overall cost limitations in MNNs.
In this paper, we investigate the guaranteed cost synchronization control for leader-following discrete-time second-order MNNs with varying transmission topologies. On the basis of the relative states between nodes, the synchronization control law with the cost consumption index function and varying topologies are constructed. Using the characteristic of the orthonormal matrix, the dynamics of the state errors between the nodes are modeled. For discrete-time MNN synchronization without cost limitations, a new design approach using lemmas is proposed to design the control parameters of gain matrices, and sufficient conditions are derived. Furthermore, an upper bound on the cost consumption index is computed according to the initial state of the proposed Lyapunov function candidate. For discrete-time MNN synchronization with cost limitations, guaranteed cost synchronization sufficient criteria are derived, in which we determine the control parameters that relate the cost limitations and the upper bound on the cost function.
Compared with existing studies on MNN synchronization, we provide various contributions from our study. First, a guaranteed cost synchronization control law and a cost consumption index function are presented for discrete-time MNN with varying transmission topologies, where the tradeoff between synchronization regulation performance and control consumption cost is considered. Most existing studies have only addressed guaranteed performance control without control cost optimization for discrete-time MNNs.24,25 Second, the impacts of cost limitations on synchronization criteria are considered to redefine the sufficient conditions with the additional constraints, which means that the whole cost consumption for discrete-time MNNs can be constrained and it is applicable in practice. In Zhou et al. 34 and Wang et al., 35 a different upper bound on the cost consumption index was reported, and the discrete-time MNNs did not consider cost limitations in those studies.
The remainder of the study is organized as follows. The second section describes the preliminaries and problem description used in this study. In the third section, we state the sufficient conditions of guaranteed cost synchronization for discrete-time MNNs without cost limitations, derive the explicit upper bound on the cost function, and finally extend the synchronization criteria to include cost limitations. In the forth section, it reports numerical simulation examples and their results as the effectiveness evidence for the proposed methods. Finally, we draw conclusions in the fifth section.
Notations: We use the following general notations throughout this study.
Preliminaries and problem description
For the following analysis, we first introduce the model of the topology graph and the graph theory notation. Problem descriptions are then provided.
Graph model of transmission topology
A second-order leader-following MNN consists of
In order to prove obtained results, the lemmas stated below are crucial for us.


Problem description
Let a second-order discrete-time MNN consist of a group of

where
where

Note that
Considering the necessity of MNN guaranteed cost synchronization, we choose positive constant parameters
Let
We focus on the effect of switching transmission topologies and cost limitations on guaranteed cost synchronization of the discrete-time MNN represented by (1).
Remark 1
In comparison with the guaranteed cost synchronization laws in Ren and Zhang 30 and Xi et al.,32,33 two key aspects can be highlighted from the synchronization law in (2). First, the relative states between nodes instead of the node states are used to construct the synchronization control law. This is because the node states may not converge to zero, but it is noted that the state errors among nodes converge to zero. Moreover, the cost consumption index function upper bound is more difficult to calculate, because it involves the node state errors and discrete-time control parameters. Second, the cost limitations are considered, which means that the whole cost supply is limited and modeled as the constrained conditions. Thus, the sufficient conditions should reflect the coupling relations between the upper bound on the cost consumption index function and the cost limitations, where the real consumption cost must be lower than the cost limitations.
Guaranteed cost synchronization for MNNs
We address the cases without and with cost limitations for second-order discrete-time MNNs with switching transmission topologies. Without cost limitations, we derive the sufficient condition to solve the control parameters for the guaranteed cost synchronization and calculate a cost consumption index function upper bound that reflects both the control effort consumption and the synchronization performance regulation. We also provide a sufficient condition when considering the cost limitations.
To facilitate the analysis, the Laplacian matrix
From (1)–(3), we obtain
Then,
Let

for
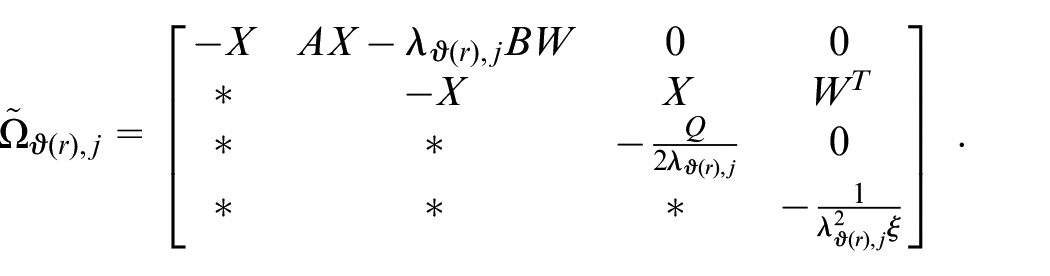
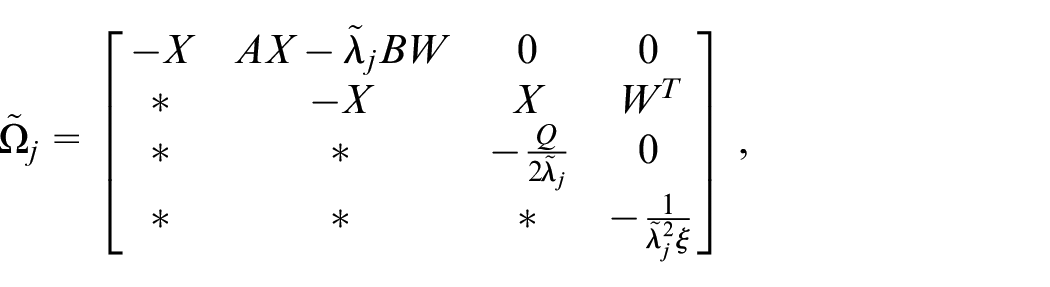
The main result of guaranteed cost synchronization is provided as the following theorem for a second-order discrete-time MNN represented by (1) with switching transmission topologies.


and
Proof: Given control input

where
By Theorem 1, we can conclude that
and

Then,
Hence, we obtain
For
where
By Lemma 1, there exists a matrix

where


Then, by the Schur complement and (16), we can obtain
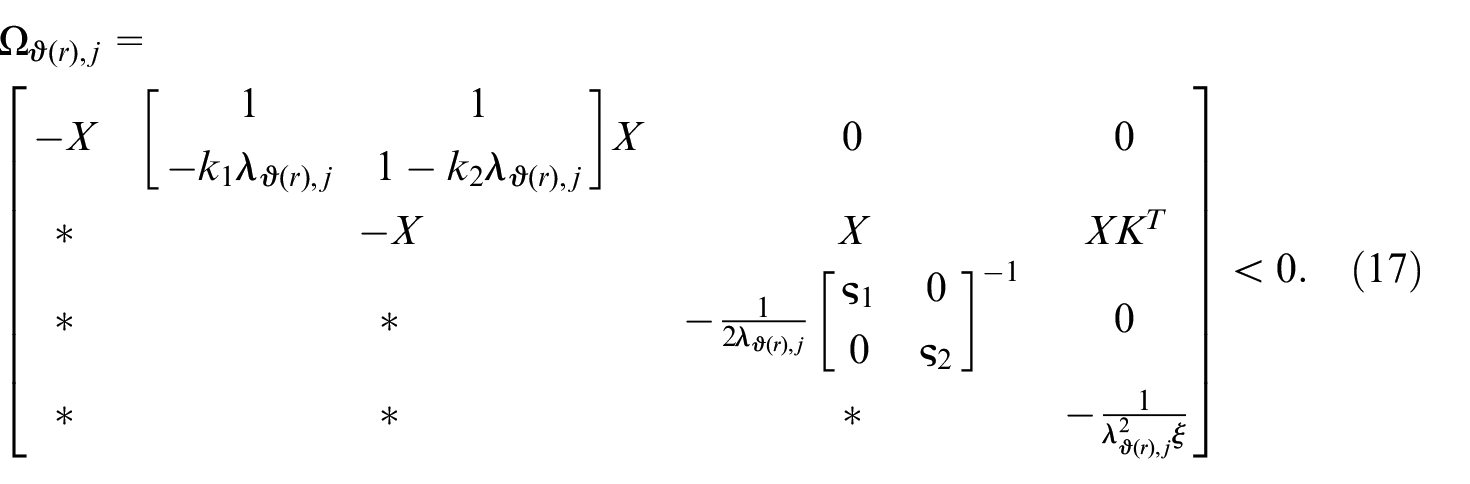
Let

where
According to the convexity of linear matrix inequalities, if

Thus, the MNN represented by (1) achieves discrete-time guaranteed cost synchronization. From the above analysis progress, we can obtain the main result of Theorem 1.
Remark 2
When analyzing the synchronization conditions, we use Lyapunov stability theory and supporting lemmas. The variables are transformed by an orthonormal matrix
Considering the cost limitations, we prove the existence of control parameters in Theorem 2.

where



and
Proof: Given control input

For

Using the proof of Theorem 1, we obtain

That is,
Remark 3
By the discrete-time control law in (2), the node dynamics can be represented using (6). By the Lyapunov stability theory and supporting lemmas, the sufficient conditions with regard to linear matrix inequalities can ensure that matrix
Numerical simulation
We verify the effectiveness of the proposed synchronization control method through simulations. We consider a two-dimensional MNN with six nodes labeled from 1 to 6. We set node 1 as the leader and the others correspond to five followers. The dynamics of all nodes are determined by (1). In addition, we consider the switching transmission topologies shown in Figure 1 and the switching sequences of topologies are shown in Figure 2. We assume that all edge weights are 1 and the adjacency matrices are 0–1 matrices. Then, the minimum nonzero and maximum eigenvalues of all the corresponding Laplacian matrices are
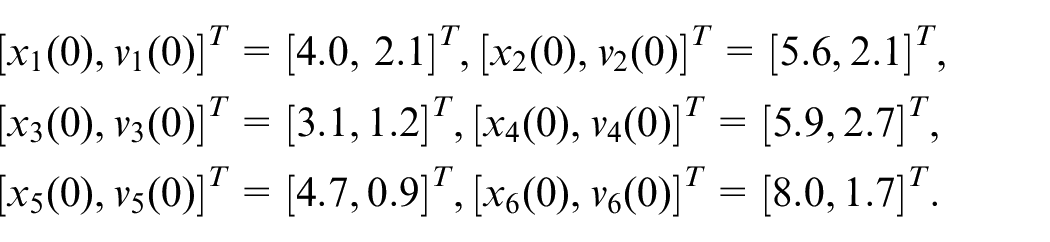
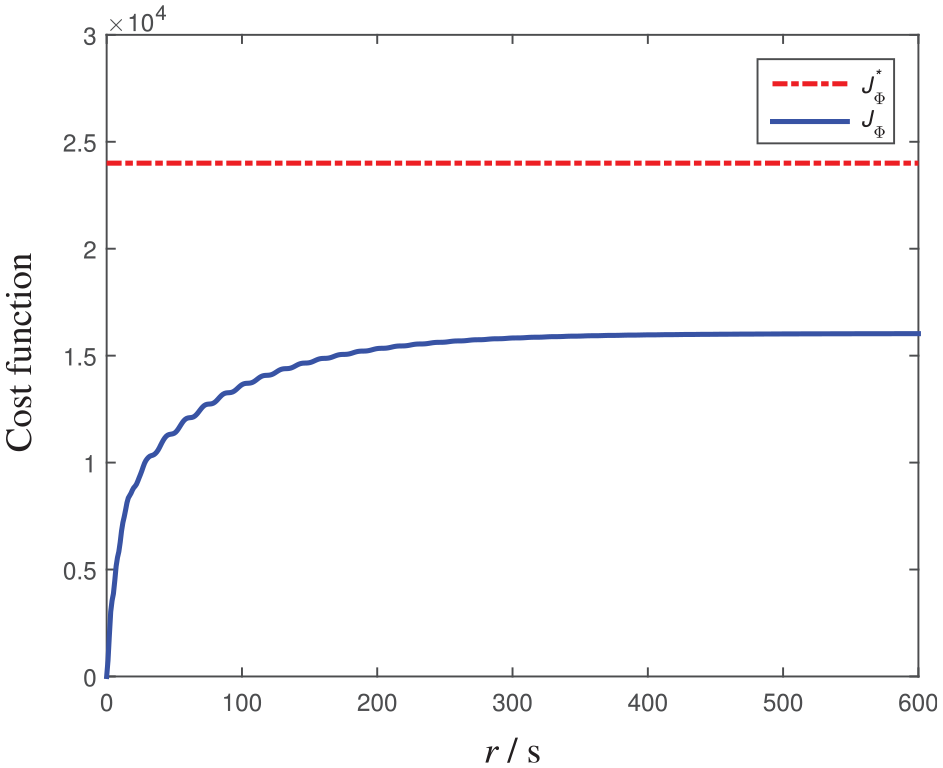
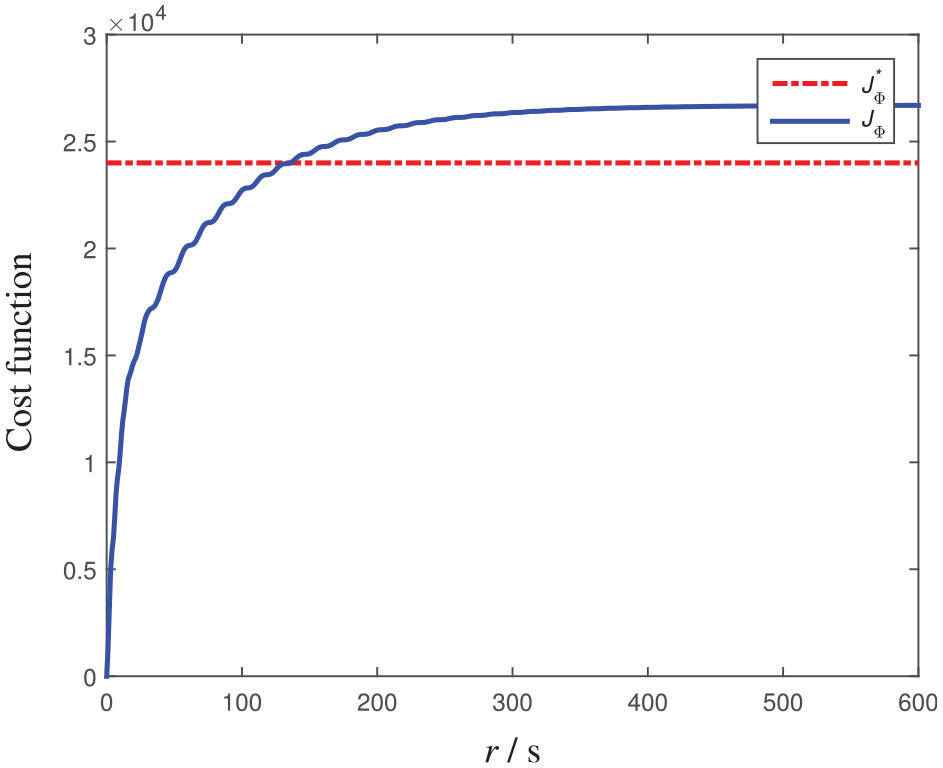
For the cost function in (2), we set constant parameters
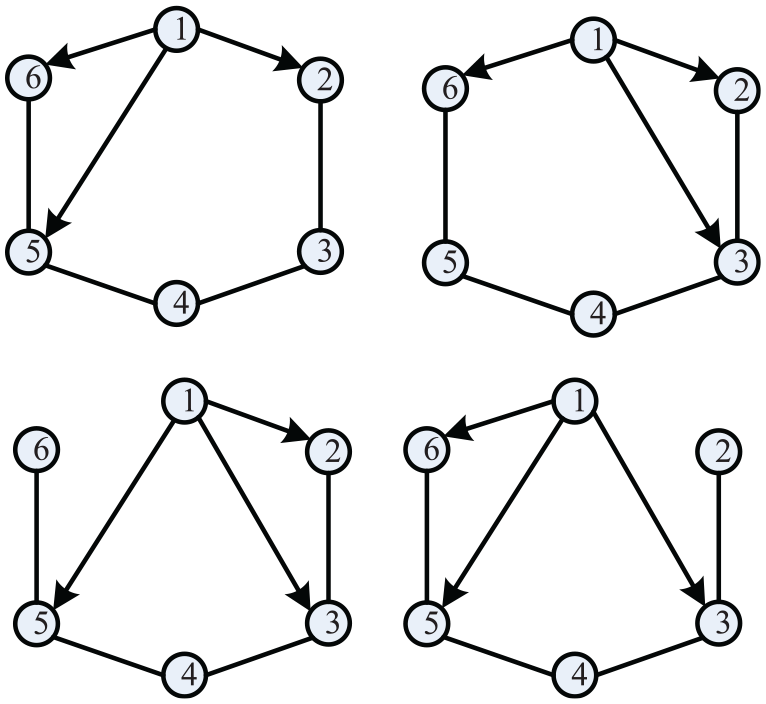
Switching transmission topology set.
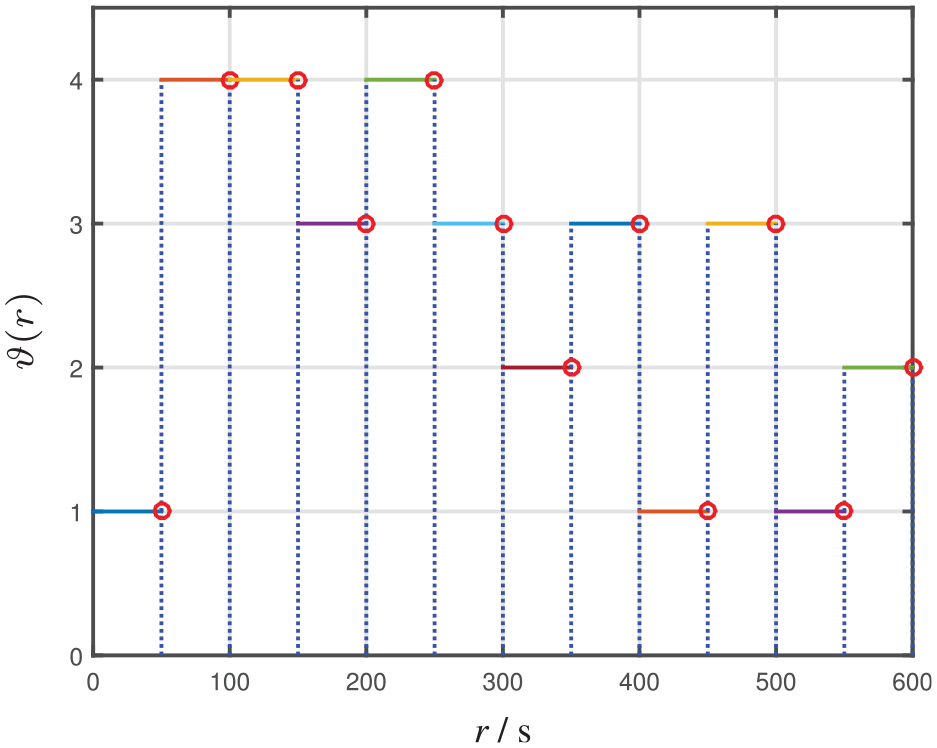
Switching signal
Figures 3 and 4 show state error trajectories of
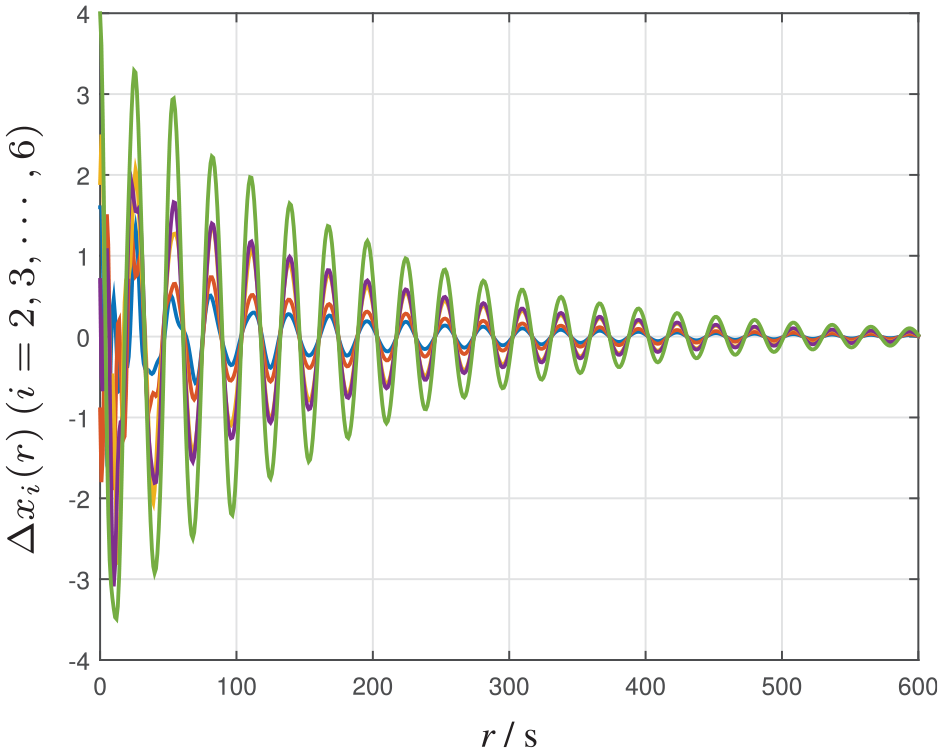
State error trajectories of
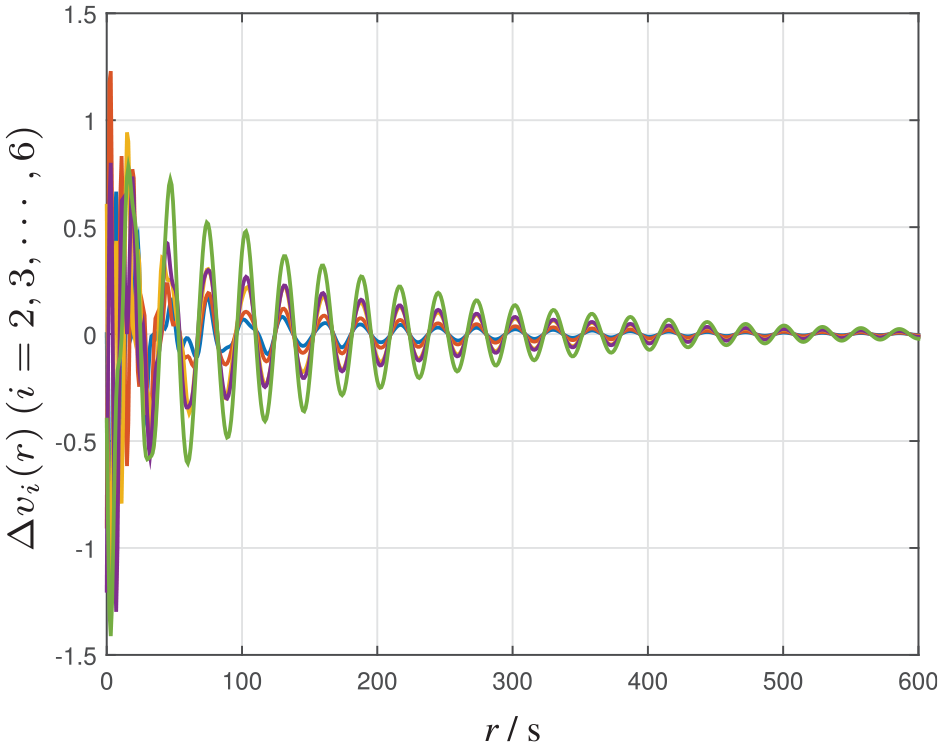
State error trajectories of
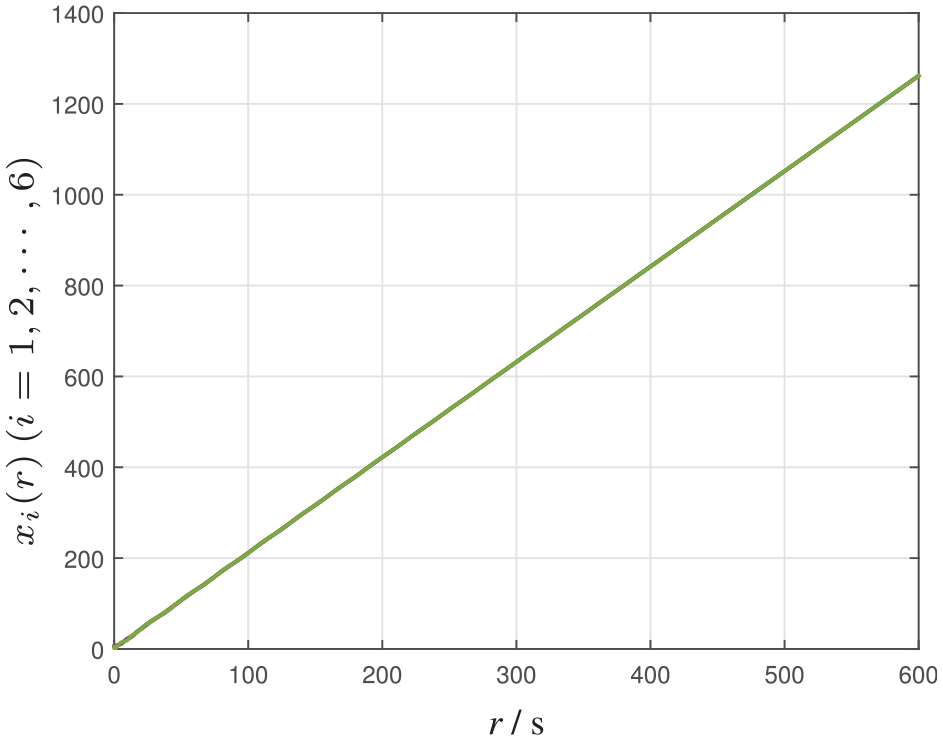
State trajectories of
State trajectories of
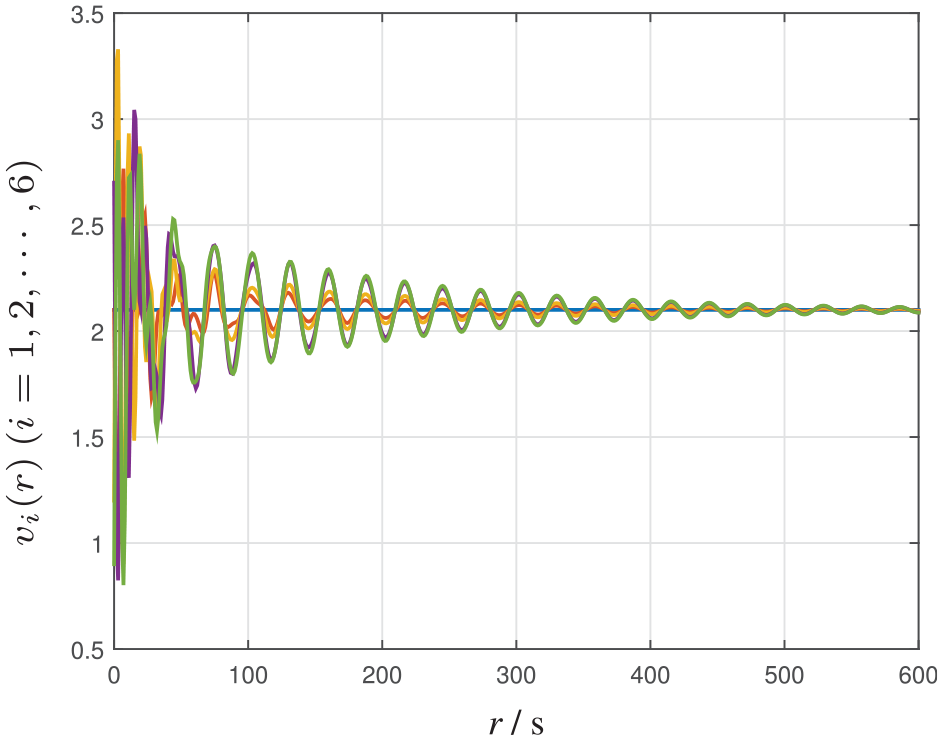
Trajectories of
Trajectories of
Conclusion
For a discrete-time leader-following MNN with switching transmission topologies, we proposed a guaranteed cost synchronization control law with a cost consumption index function. The tradeoff between synchronization regulation performance and control consumption cost was balanced. In addition, Lyapunov stability theory and supporting lemmas were allowed to derive the sufficient conditions without cost limitations with regard to linear matrix inequalities, where the dimensions of the matrix variables did not rely on the quantity of nodes. Moreover, we determined a specified upper bound on the cost function, which is related to the initial relative states and control parameters. Then, we extended the leader-following guaranteed cost synchronization to include cost limitations, where the coupling relation between the cost limitation and the upper bound on the cost consumption index function was considered. The resulting criteria to achieve guaranteed cost synchronization only required checking whether the matrix variations were negative. Especially, further works mainly focus on designing the synchronization control law for the discrete-time leader-following MNN with jointly connected transmission topologies. It should also be mentioned that some new synchronization control approaches are required to solve these problems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under Grants 61703411, 61763040, 61503009, 61867005, and 61574049, in part by the Innovation Foundation of High-Tech Institute of Xi’an under Grant 2015ZZDJJ03.