
Abstract
Many multi-agent systems (MASs) can be regarded as hybrid systems that contain continuous variables and discrete events exhibiting both continuous and discrete behavior. An MAS can accomplish complex tasks through communication, coordination, and cooperation among different agents. The complex, adaptive and dynamic characteristics of MASs can affect their stability that is critical for MAS performance. In order to analyze the stability of MASs, we propose a stability analysis method based on invariant sets and Lyapunov’s stability theory. As a typical MAS, an unmanned ground vehicle formation is used to evaluate the proposed method. We design discrete modes and control polices for the MAS composed of unmanned ground vehicles to guarantee that the agents can cooperate with each other to reliably achieve a final assignment. Meanwhile, the stability analysis is given according to the definition of MAS stability. Simulation results illustrate the feasibility and effectiveness of the proposed method.
Introduction
Multi-agent systems (MASs) are dynamic systems where agents with autonomous behavior communicate with each other through communication networks to achieve cooperative goals. Many systems in different fields, such as biology, computer, and social networks, can be considered as MASs.1–3 Due to the universal existence and wide application of such a kind of systems, the research on MASs has attracted much attention. Over the past two decades, according to different classification methods, a lot of meaningful results have been obtained on cooperative control for various types of MASs, such as linear or nonlinear MASs, first-order or higher-order MASs, continuous-time or discrete-time MASs.4–13
To accomplish a complex task, the dynamic model of agents in an MAS may be different, or each agent may be affected by the mixing law, leading to hybrid system. The former hybrid systems composed of agents with different dynamic structures is also called heterogeneous MASs. There are many interesting research results for such systems. Zheng and Wang14,15 investigated consensus and finite-time consensus problems of heterogeneous MASs consisting of first-order and second-order integrators. Zuo et al. 16 considered an output containment control problem of general linear heterogeneous MASs with multiple unknown leaders. For a class of nonlinear heterogeneous MASs, the event-triggered cooperative global robust output regulation problem was studied. 17 The above mentioned studies investigate the relevant control problems of heterogeneous MASs by designing appropriate controllers and using matrix theory, Lyapunov theory, adaptive theory, etc. Different from the hybrid MASs above, switching systems, as typical hybrid systems, have attracted more and more attention. Zheng and Wang 18 focused on the consensus problem for a class of switched MASs, where a system can be switched arbitrarily on continuous-time and discrete-time subsystems. Zhu et al. 19 further studied the containment control problem for such a switched MAS.
However, in the literatures mentioned above, the authors mainly study whether MASs or hybrid systems can achieve the final cooperative goal under designed controllers from the perspective of control. In practice, stability has always been an important criterion for determining the reliability of a system. The complex, adaptive, and dynamic characteristics of MASs can affect their system stability. Therefore, it is necessary to analyze the stability of the system under different environments. There are some different definitions and analytical methods of stability for hybrid systems. Lyapunov theory is a basic method. For hybrid systems composed of continuous-time and discrete-event autonomous individuals through some logic or decision-making processes, an agent is usually modeled by differential or difference equations, and the decision-making or logic is described by Petri nets or finite automata.20,21 Such hybrid systems have wide applications in various industrial, electronic, and military fields. 22 At present, some important results on the stability of such hybrid systems have been achieved.23–27 Ye et al. 23 gave the definition of Lyapunov stability by invariant sets and sufficient conditions for uniform stability, asymptotic stability, and instability are obtained. Branicky 25 reported a multiple Lyapunov functions method for switching hybrid systems. Decarlo et al. 26 summarized the main results of Lyapunov stability for finite dimensional hybrid systems, and discussed stronger and more specialized results of switching linear systems (stable and unstable). In addition, there are some other significant results on the stability for hybrid systems.28–31
From a single agent to an MAS with a hybrid structure, its dynamic characteristics become more complex that makes its stability analysis more difficult. Therefore, how to find a effective Lyapunov function that satisfies system stability is the main work in the stability study of hybrid systems. It is also a difficult problem in stability theory study, which has not been well solved so far. Therefore, based on the application value of the MASs with hybrid characteristics and the discussion above, this work mainly addresses the stability of the hybrid MASs composed of continuous variables and discrete events and give some application in practical problems.
In this work, an agent in a hybrid MAS is subject to the differential equations, but its state is always continuous and different continuous variables are switched according to discrete event mechanisms. First, with the help of the reachability, activity and fairness of MASs induced by the theory of discrete-event systems, we give the stability analysis method of a hybrid MAS based on the stability definition of discrete-event systems. Second, as a typical MAS, an unmanned ground vehicle formation is used in this paper to evaluate the reported method. The discrete modes and control polices for the MAS are proposed to guarantee that the agents can cooperate with each other to reliably achieve a final assignment. The stability analysis is also given according to the definition of MAS stability. Obviously, UGV movements and formation changes will affect the dynamic stability of UGVs, so the stability analysis for such a system is challenging.
The remainder of this work is organized as follows. Section II gives a brief discussion on an agent and MASs, and reviews agent stability. Section III proposes a stability analysis method of MASs. Section IV uses an example of UGVs to illustrate the proposed method. Section VI concludes the work.
Preliminaries
Agent and MASs
An agent is an entity with autonomous behavior in a complex environment, which can determine or control its next behavior according to internal state and external events. It may contain both continuous variables and discrete events, called hybrid system, which is a typical switched hybrid system. 32 MASs composed of multiple agents interacting with each other can be regarded as discrete-event systems using aggregation, where their continuous dynamic behavior is integrated into discrete events. 24
Since an MAS consists of multiple autonomous agents communicating with each other through networks, such a system has complex dynamic characteristics. From the perspective of discrete-event systems, we should analyze and verify security, reachability, liveness, and boundness of systems. We can use Petri nets to model and analyze MASs. At the same time, to verify whether a system satisfies its specifications, model checking techniques can also be employed. From the perspective of continuous systems, we should discuss the stability of systems. A well-designed agent and MASs must be stable, robust, and adaptive systems, thus ensuring that the whole systems are safe and reliable. In this work, we focus on the stability analysis of multi-agent systems.
Stability analysis of agent
The basic research method for stability analysis of hybrid systems is the Lyapunov theory. The Lyapunov’s direct method analyzes stability of systems from the energy point of view. If the energy stored in a system is gradually decreasing, the system is stable; On the other hand, if the system constantly absorbs energy from an environment, and its energy is gradually increasing, it is unstable. How to design and obtain a suitable Lyapunov function is the key to analyze stability of hybrid systems.
A single agent can be seen as a switched hybrid system where continuous variables are switched according to discrete events. We regard discrete states as modes of an agent, where the states that continuously evolve in each mode are described by differential equations. When a state reaches a certain threshold, a corresponding discrete event is triggered, thus causing mode switching.
An autonomous agent can be defined as

where
Define an equilibrium


then
Therefore, if internal control strategies of an agent make the equilibrium
We can analyze agent stability using the multiple Lyapunov function method.
25
Suppose that the initial state

where
for
then it is the Lyapunov-like function.
The multi-Lyapunov function can be used to study whether switching sequences are stable where equilibria are different in discrete modes. Meanwhile, mental states of an agent are described by using the Belief-Desire-Intention model that provides knowledge-based planning methods to generate switching sequences, driving the agent to reach equilibria of corresponding goals.
Stability analysis of multi-agent systems
MASs can be regarded as discrete events dynamic systems at a macro level, which can be modeled by automata. The stability of MASs means that multiple stable agents can achieve goals through negotiation and collaboration. In this section, we propose stability analysis methods for MASs.
Suppose that an MAS M is described by automata,
A brief introduction of the notation used in the analysis is given as follows.
It can be seen from the above definition that the states in an invariant set remain in it after switching. Consequently, we can construct a state set as an invariant set by setting control policies.
According to the above definitions, the sufficient and necessary conditions for the stability and asymptotic stability of invariant sets in the sense of Lyapunov can be obtained.
34
For MASs, once a group of agents reaches goals and accomplishes tasks, mode switchings do not occur. Therefore, we can make agents reach a goal set by designing corresponding control policies, and regard the goal set as an invariant set. Denote an MAS initial state set
Each agent is stable;
There exist a set of allowed events
then the MAS can achieve asymptotically stable.
We can find a Lyapunov-like function to ensure the stability of each agent, thus making condition (1) hold. Condition (2) indicates that at least one finite mode sequence can make the metric of different states tend to be zero. It becomes zero when goals are completed.
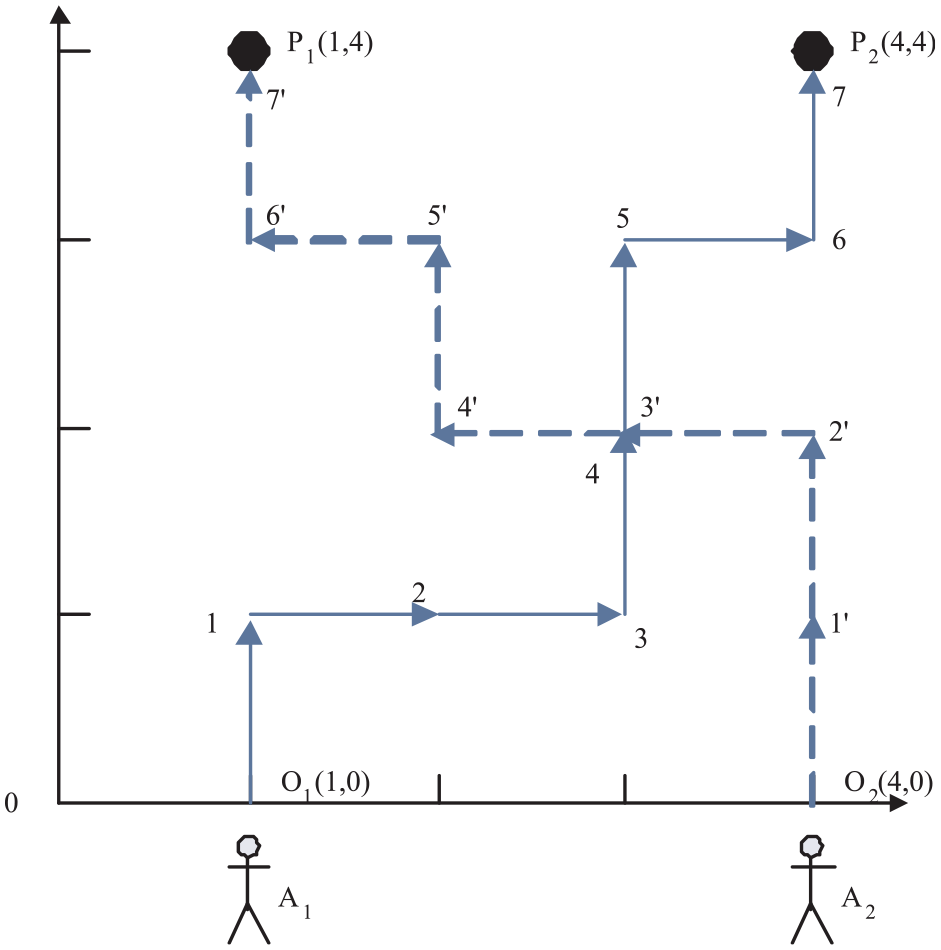
Two agents random walk.
The state of an agent at time k is denoted as
According to the MASs stability criterion, we take the Manhattan distance of each agent and target sets as a metric, namely

The simulation result in Figure 2 shows that the MAS converges in finite steps.
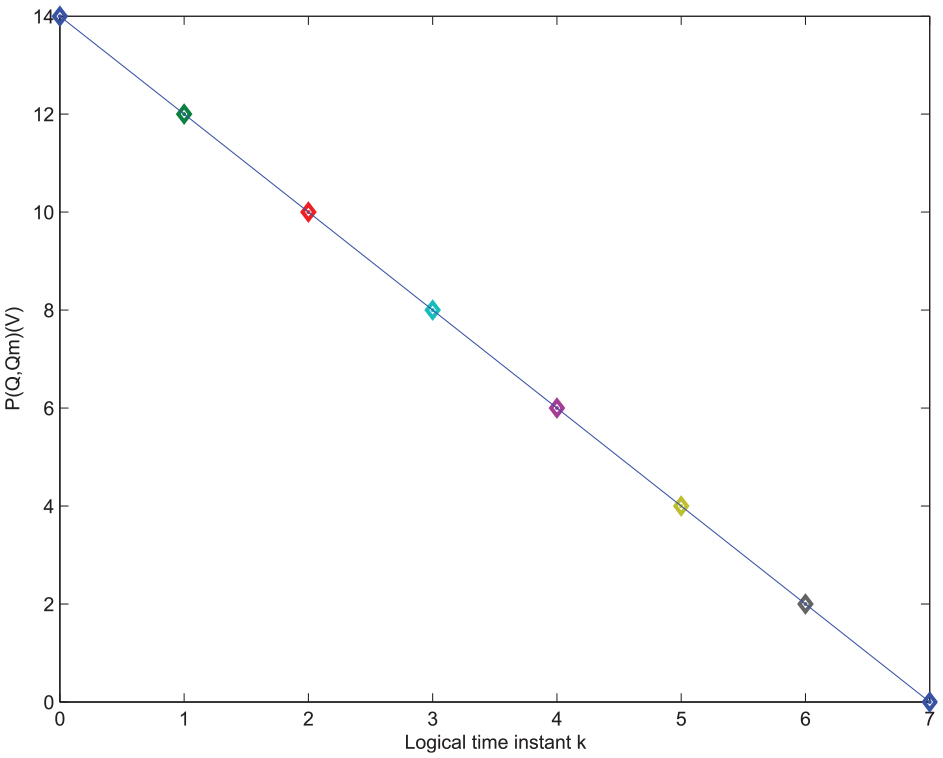
Two agents random walk: the metric function
Case study
Unmanned ground vehicles are typical MASs, where a UGV can be designed to work as a single agent to carry out a task and UGVs collaboratively perform complex tasks. UGV movements and formation changes will affect the dynamic stability of UGVs, which ensures the safety and reliability of UGVs. Therefore, the stability analysis of UGVs plays an important role for their performance.
UGV MASs
In this section, we consider a UGV formation that conducts reconnaissance, surveillance, and attack missions. This formation consists of five UGVs. Each UGV is regarded as an agent. Therefore, the UGVs are regarded as MASs with collaborative capabilities. Suppose that a UGV agent with some sensors can apperceive an environment and avoid obstacles. As soon as any one of the agents in the UGV formation detects targets, it will transmit the information to the other agents, so as to conduct coordinated attacks.
Each UGV agent is a switched hybrid system that includes several modes and discrete events, where each mode is described by a continuous time variable system and discrete events drive mode switching.
UGV agent state analysis
A continuous state of each UGV agent is

where v and
The discrete modes and control policies of the UGV agent.
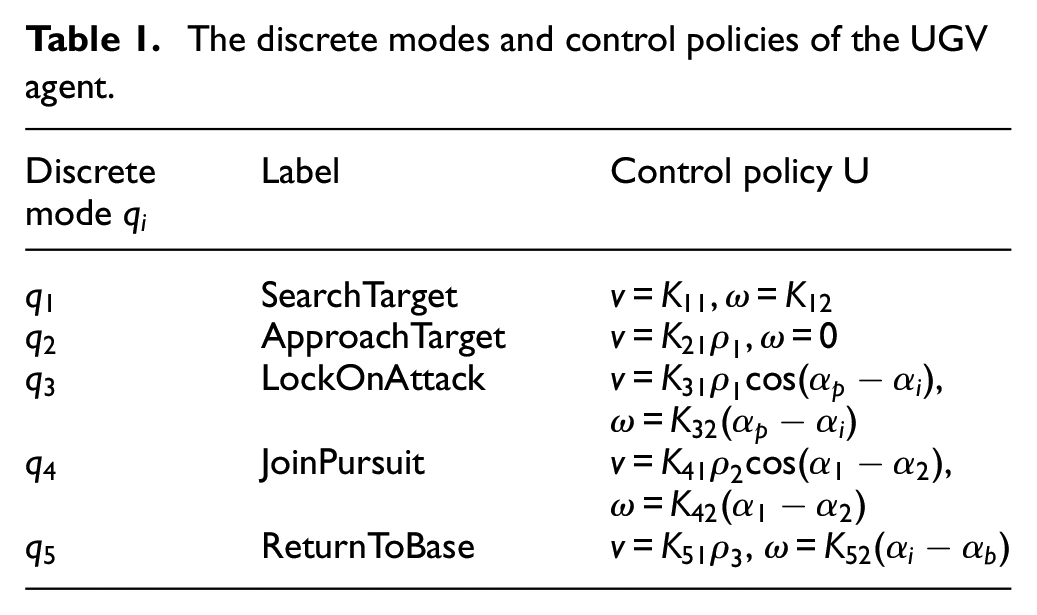
A UGV agent first initializes and then goes into mode
The states in the above several discrete modes are described by time dynamic equations that describe state evolution of UGV agents. The discrete events in a UGV agent are as follows:
UGV agent stability analysis
Suppose that

namely,
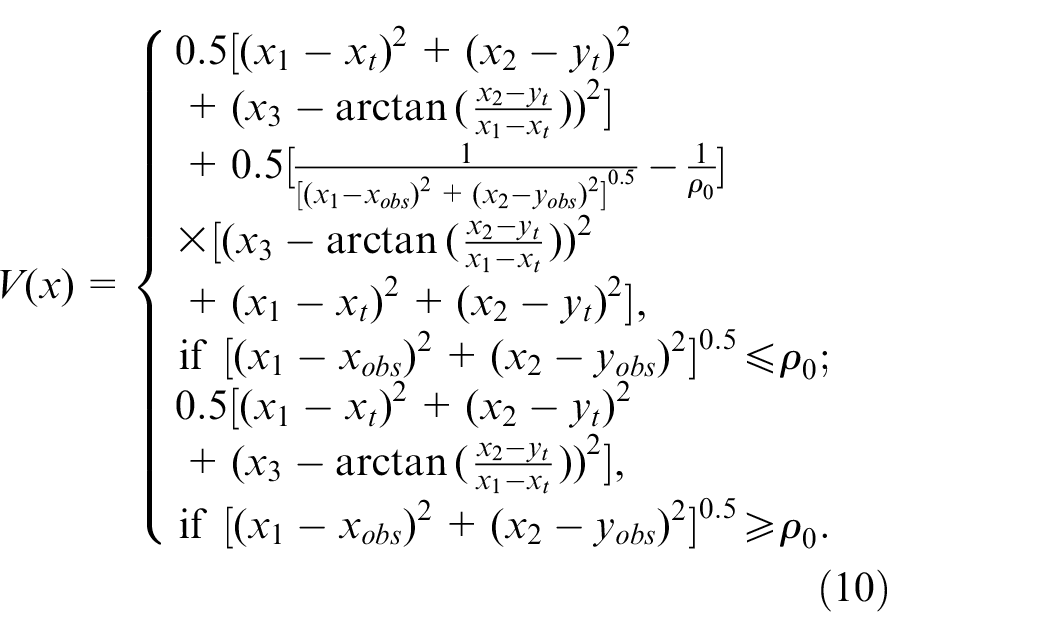
The artificial potential field method is used to select Lyapunov functions.35,36 It creates a potential field
The most common gravitational force function

where
The most common repulsion potential field function is revised to make a UGV agent reach targets with the minimum repulsive force. Consequently the total potential field force is the minimum.

where
According to the artificial potential field method, a Lyapunov function can be given as
When a UGV agent is at the equilibrium
To make a UGV agent stable, we should set control policies
For mode 2 (ApproachTarget), the control policy
we assume that
Obviously, if
In the same way, we can obtain the policies of modes 3, 4, and 5, and then set a proportional control gain
Simulation and analysis
We first conduct a simulation where there are no obstacles in an environment. Suppose that two UGV agents are farthest from a target when the simulation is initialized, and they return their base after performing their goals. The simulation results are shown in Figure 3, where the triangles represent the initial positions of the UGV agents and target, the circles represent the positions where the UGV agents destroy the target, and the dotted lines represent the trajectories that the UGV agents return to the base. The simulation results show that the proposed model is effective and UGV agents can achieve their missions.
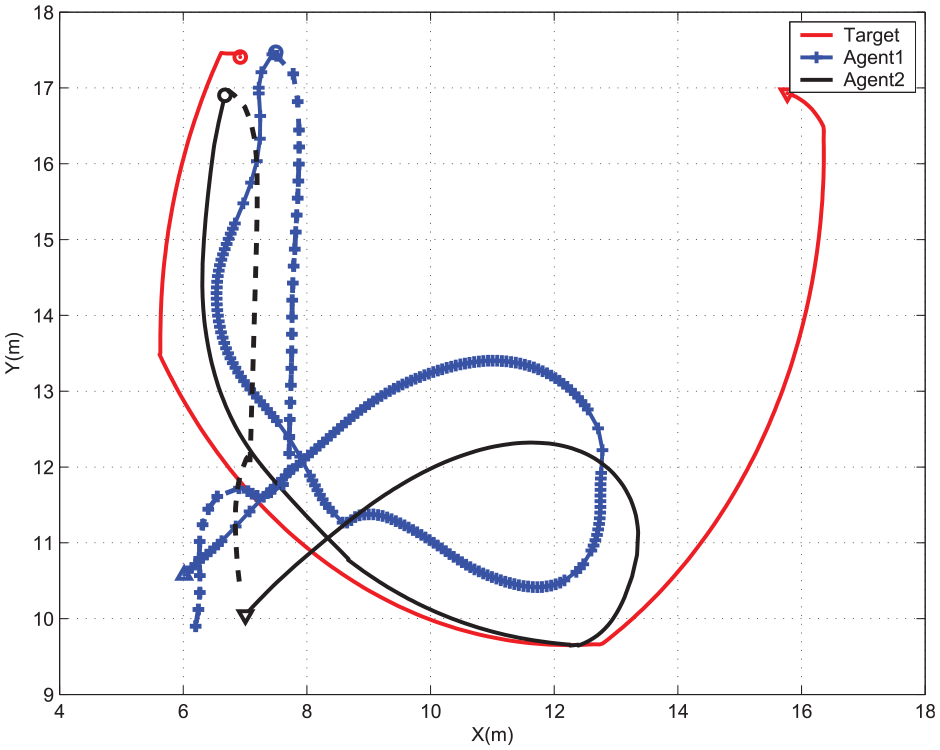
The trajectories of UGV agents and the target with no obstacles in the environment.
Furthermore, we consider a complex situation. The initial configuration is shown in Figure 4, where UGV agents are farthest from a target and there are some obstacles in the environment. The goal of a UGV agent is to destroy target and return to its base. The simulation results are shown in Figures 5 to 7. Since the UGV Agent formation is stable under the worst initial conditions, we can be sure that the formation is still stable under other initial conditions. Figures 5 and 6 represent the trajectories of UGV agents attacking the target in X and Y coordinates, respectively. It can be seen from Figures 5 and 6, the UGV agents first discover the target around 5 s, and then the two UGV agents jointly pursue the target. In the pursuit process, the trajectory of UGV Agent and Target Agent is basically the same. Figure 7 shows the trajectories of UGV agents returning to the base.
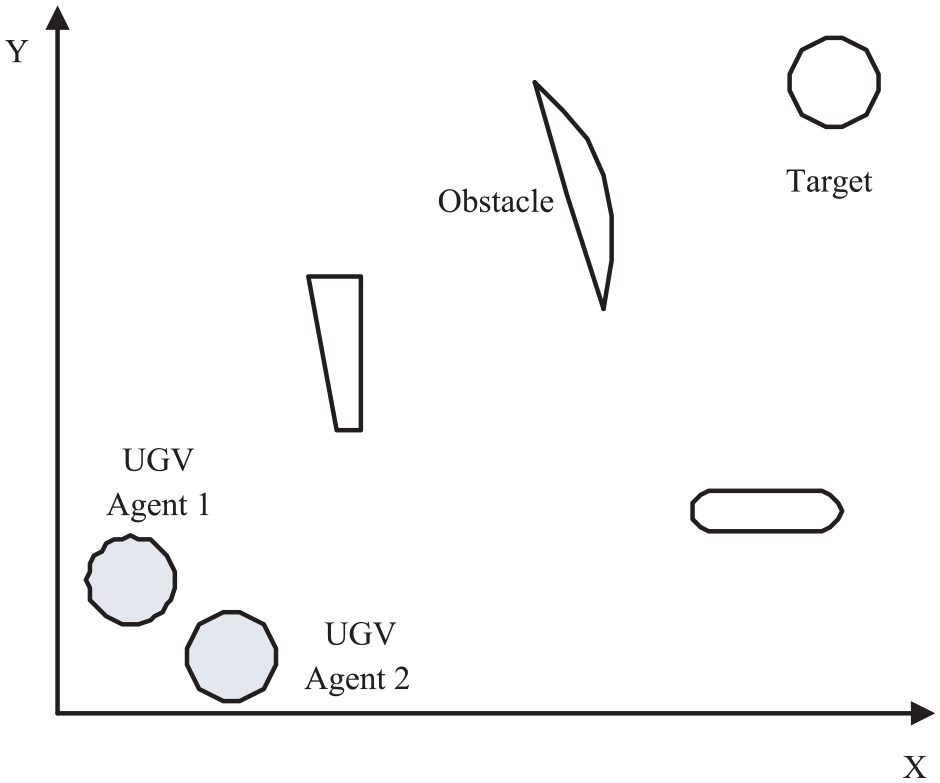
A complex scenario with obstacles.
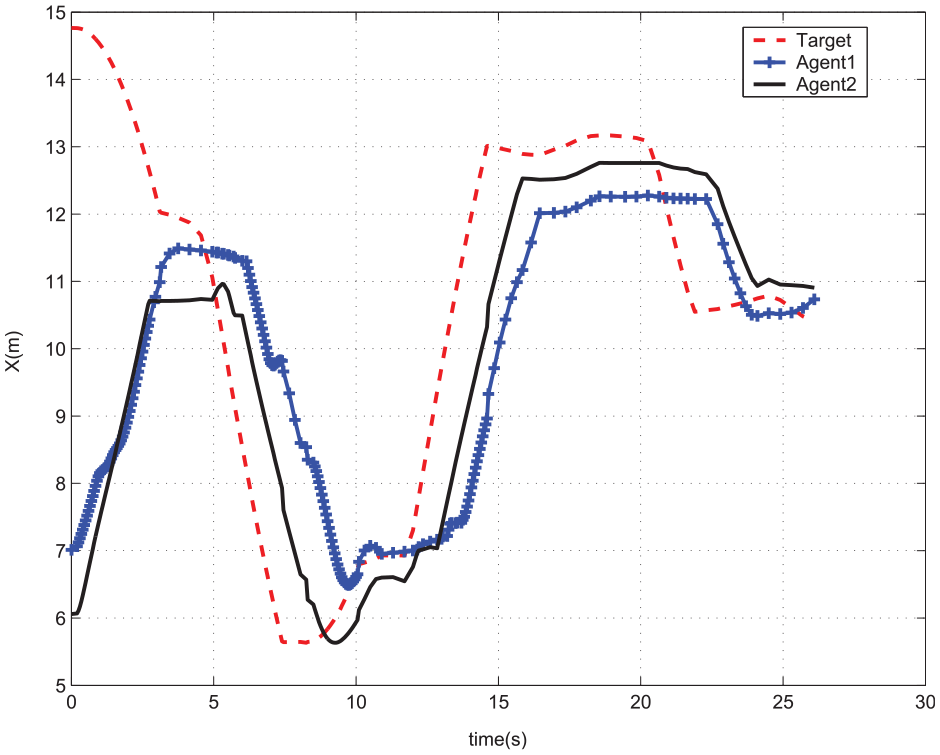
The trajectories of UGV agents and the target UGV Agent in X coordinate.
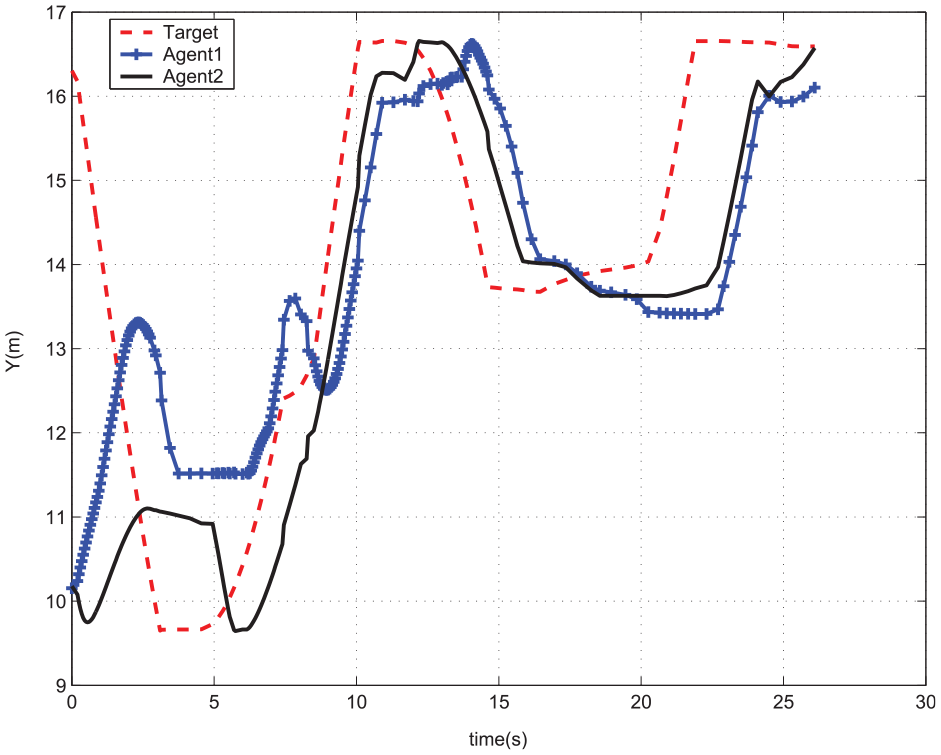
The trajectories of UGV agents and the target UGV Agent in Y coordinate.
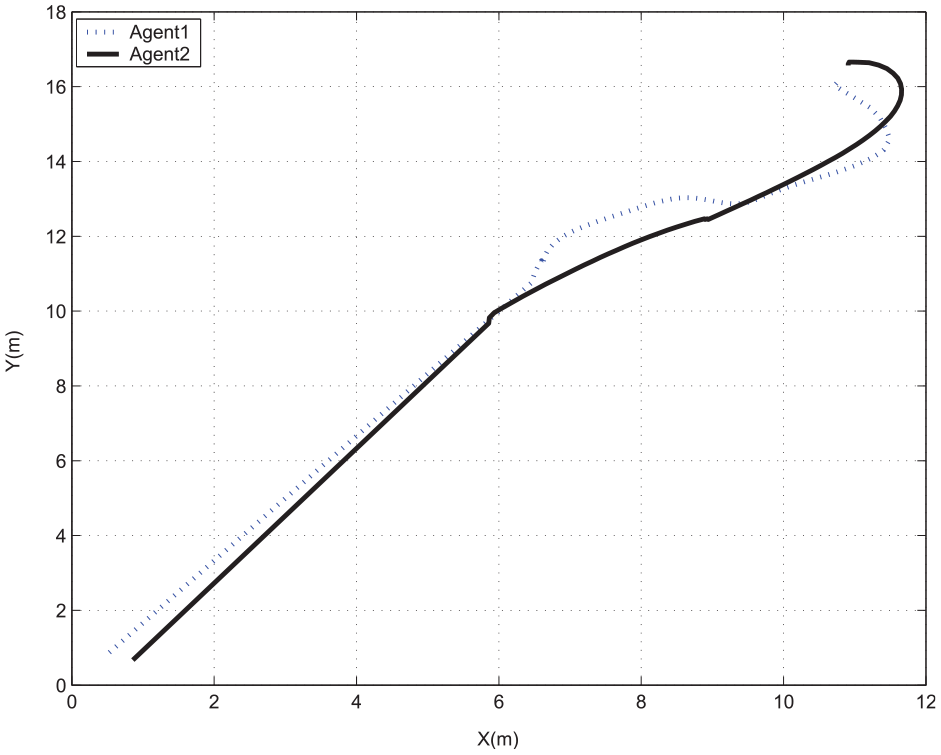
The trajectories of UGV agents returning to the base.
The allowed event set of the two UGV agents is

The metric simulation result is shown in Figure 8, which shows that the UGV agent formation is convergent in limited steps. According to the proposition of MAS stability, the UGV agent formation is stable.
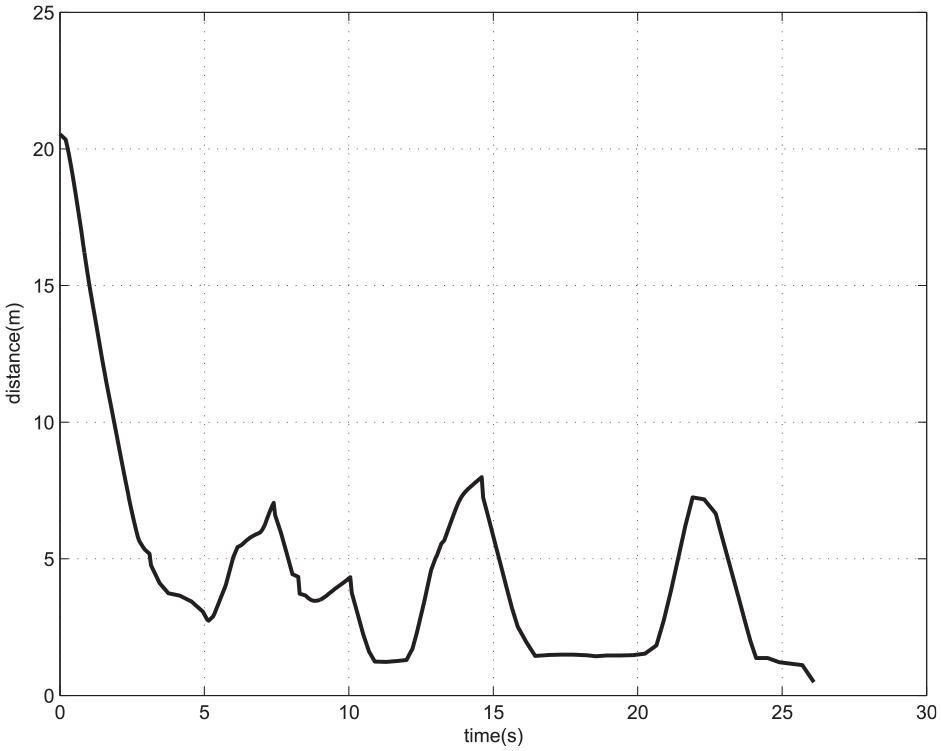
The distance between UGV agents and the target.
Conclusion
This paper studies the stability of a switched hybrid MAS and provides a stability analysis method for the hybrid MAS based on invariant sets and Lyapunov’s stability theory. Then, for the UGVs formation, the stability of such a system is discussed in detail based on the given definition of MASs stability. Lyapunov functions are designed with the help of the artificial potential field method. The simulation results show that the proposed method is effective for the hybrid MASs. In the future, we will further consider the stability and group consensus problem for hybrid multi-agent systems under more general networks, such as the presence of attacks, disturbances, or communication delays.9,37–39
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Nos. 61873277 and 71571190), the Key Research and Development Program of Shaanxi Province (No. 2019GY-056) and the Special Scientific Research Plan Project of Shaanxi Provincial Department of Education (No. 21JK0488).