
Abstract
This paper studies the distributed convex optimization problem, where the global utility function is the sum of local cost functions associated to the individual agents. Only using the local information, a novel continuous-time distributed algorithm based on proportional-integral-differential (PID) control strategy is proposed. Under the assumption that the global utility function is strictly convex and local utility functions have locally Lipschitz gradients, the exponential convergence of the proposed algorithm is established with undirected and connected graph among these agents. Finally, numerical simulations are presented to illustrate the effectiveness of theoretical results.
Introduction
Recent years have witnessed an increasing interest in distributed optimization and its widely applications in various fields, including energy internet, intelligent manufacturing and machine learning.1–4 The aim of distributed optimization problem is to minimize global objective function with a sum of individual objective function, which computes and exchanges information among neighboring agents. The research on distributed optimization can be traced back to the pioneering work5,6 and then many valuable algorithms for this topic have been proposed, which can mainly be classified as discrete-time algorithm and continuous-time algorithm.
The discrete-time algorithm has attracted much attention since the distributed gradient descent (DGD) algorithm was proposed by Nedić and Ozdaglar. 7 But, due to the diminishing step-size, the convergence rate of DGD algorithm was slow. Then, Shi et al. 8 proposed an exact first-order algorithm (EXTRA) with fixed step-size, which converges to the optimal solution precisely. In order to eliminate the requirement of the double random weight matrix, the push-sum algorithm under the directed graph was proposed by Nedić and Olshevsky. 9 And then, the combination of push-sum protocol and distributed subgradient algorithm were proposed for unconstrained distributed optimization problem in the directed time-varying topology.10–12 By introducing projection operator, various distributed projection algorithms for constrained distributed optimization problem were proposed in Lou et al., 13 Lin et al., 14 Liu et al.,15,16 Wang et al., 17 and Liang et al. 18 To deal with equality and inequality constraints, Chang et al. 19 proposed the consensus-based distributed primal-dual perturbation (PDP) algorithm, which was applied to smooth inequality constraints and non-smooth constraints. For the case of non-smooth optimization problems, a smooth double proximal primal-dual algorithm was present in Wei et al. 20 Moreover, without convexity assumptions on the objectives, a chebyshev proxy and consensus-based algorithm (CPCA) was given in He et al., 21 which had low computational costs.
As a counterpart, much attention has also been paid to the continuous-time algorithm. Several distributed optimization algorithms with the single integrator dynamics were proposed in Lin et al., 22 which considered state-dependent gradient gains and nonuniform gradient gains. Considering second-order multi-agent networks, a double-integrator distributed optimization algorithm under the undirected graph was presented in Zhang and Hong. 23 Based on the Karush-Kuhn-Tucker condition and the saddle point property, a new distributed algorithm for constrained optimization was developed in Yi et al. 24 With impulsive communication framework, an average quasi-consensus algorithm for distributed constrained optimization was designed in He et al. 25 In order to reduce communication costs and energy consumption, the event-triggered control idea was introduced to design the distributed optimization algorithm. In Chen and Ren, 26 the event-triggered zero-gradient-sum algorithm was established. In Li et al., 27 distributed optimization algorithm with event-triggered communication via input feedforward passivity was presented, and the event-triggered distributed fixed-time optimization algorithm over a directed network was developed in Yu et al. 28
Due to the progressive control techniques, various of algorithms based on proportional-integral (PI) control strategy for distributed optimization have attracted an increasing attention recently. Wang and Elia 29 proposed a distributed optimization algorithm based on PI control strategy, where each agent used an auxiliary state to correct the error caused by different local gradient. Based on PI control strategy, a continuous-time coordination algorithm with discrete-time communication was investigated in Kia et al., 30 which can reduce communication costs and energy consumption. Combining projection output feedback with PI protocol, the distributed convex optimization subject to general constraints was studied in Yang et al. 31 It is well known that proportional-integral-derivative (PID) control strategy is a classic control approach, which has simple structures, clear physical meaning of parameters, and strong robustness. Thus, it has been applied in various fields, such as, active disturbance rejection control (ADRC), 32 formation control, 33 and so on. But, to the best knowledge of ours, the PID control strategy for distributed optimization problem has not been discussed.
Based on the above discussions, a new continuous-time algorithm with PID control strategy for distributed optimization under an undirected communication graph is studied in this paper. The main contributions of this paper are as follows. (I) The PID algorithm is firstly presented for distributed optimization, where each agent uses only local information, that is, the proposed algorithm is fully distributed. (II) Using the matrix transform and the inequality technique, the exponential convergence and the estimation for convergence rate of the proposed algorithm are established under the assumption that the global utility functions are strictly convex and local utility functions have locally Lipschitz gradients. (III) The constriction on the initial value is removed, which has less conservation than that in Zhang and Hong 23 and Kia et al. 30
The remainder of this paper is organized as follows. Section 2 is devoted to mathematical preliminaries on distributed optimization problem. The continuous-time distributed PID algorithm and its convergence are presented in Section 3. Numerical examples are given to illustrate the performance of the proposed algorithms in Section 4. Finally, conclusions are drawn in Section 5.
Preliminaries
Graph theory
A weighted undirected graph is a triplet
An undirected edge
Problem formulation
Consider a network of

The global utility function

Moreover, a function

and for each

In this paper, we focus on designing a distributed proportional-integral-differential (PID) algorithm such that each agent obtains the global minimizer

only using its own and its neighbors’ information.
Distributed PID algorithm
In this section, we propose a distributed PID algorithm and obtain the convergence result.
For each agent
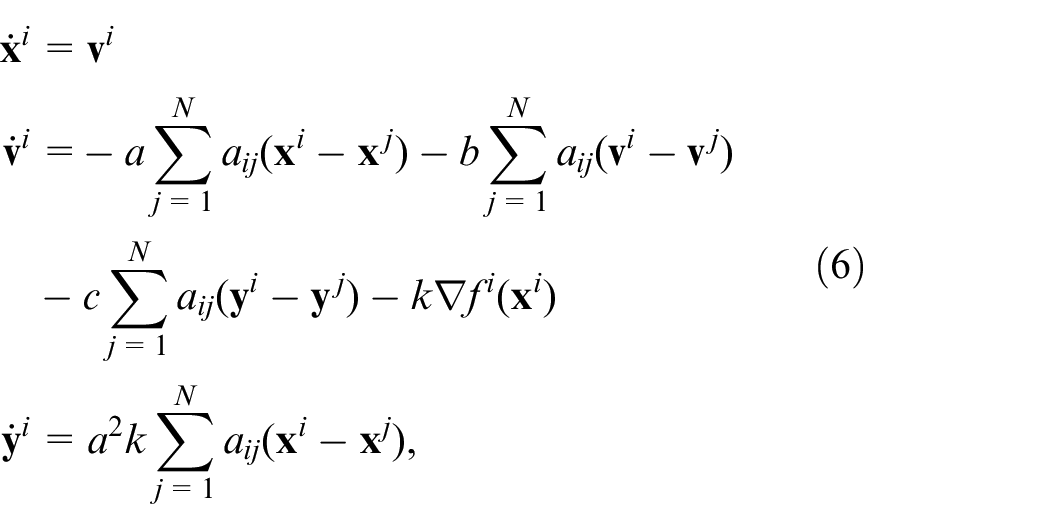
where
Denote

where
Assume that
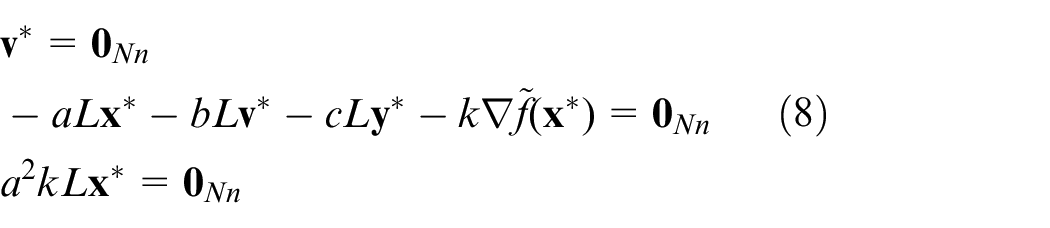
Since

Next, it will be shown that

and then

which implies
The proof is completed.
Let

where
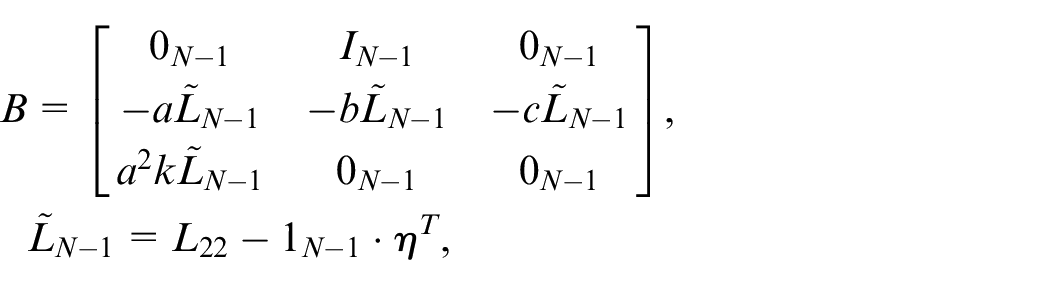
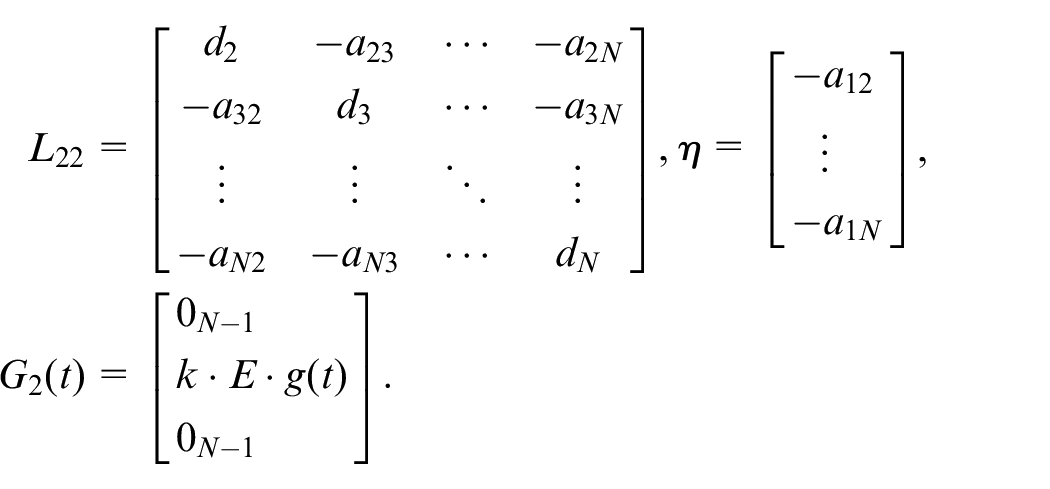
Denote

where
Since the communication topology
Let

where

Assume
If

It follows that

that is

Thus, there is at least a

Denote

Case 1:

Thus, by the Routh-Hurwitz theorem,
Case 2:

Since
Thus, all the eigenvalues of

Noticing (11), by the variation of parameter formula, we have

and then
According to (4), it can be obtained that
where
where
Now, for any

If (21) does not hold, by continuity, there must exist a
For

The contradiction in (23) shows that (21) is valid for any

which implies that
The proof is completed.
Numerical simulations
In the following, the proposed PID distributed algorithm is illustrated by some numerical simulations. We assume that there are six agents in the undirected and connected communication graph, which is described as Figure 1.
Case 1: All local cost functions are convex.
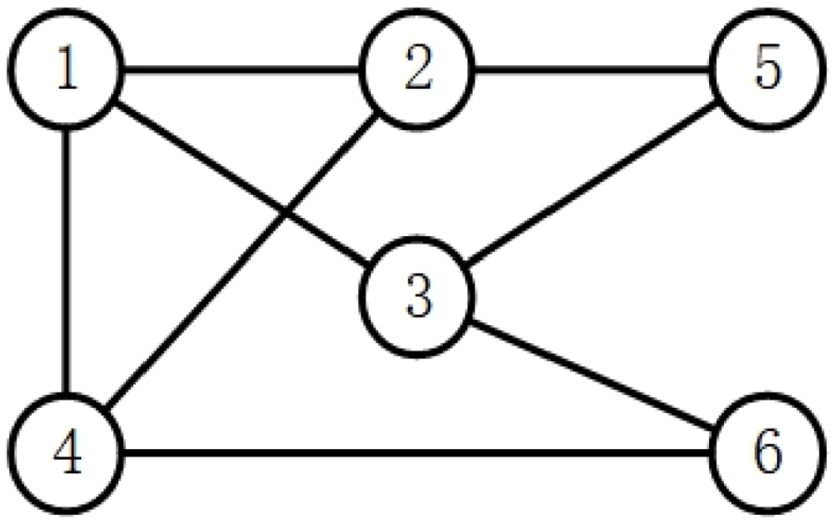
Communication graph.
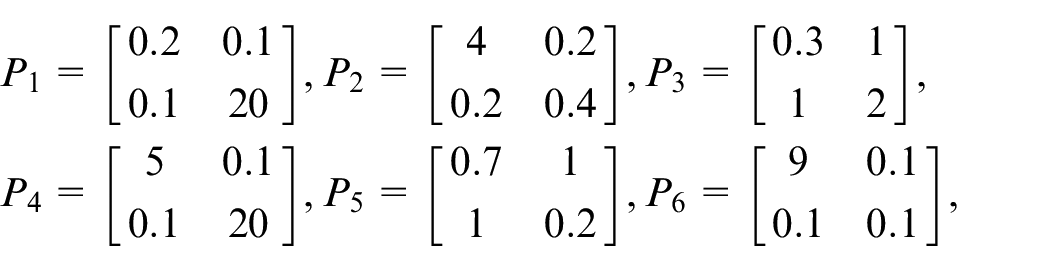
Assume that
Let
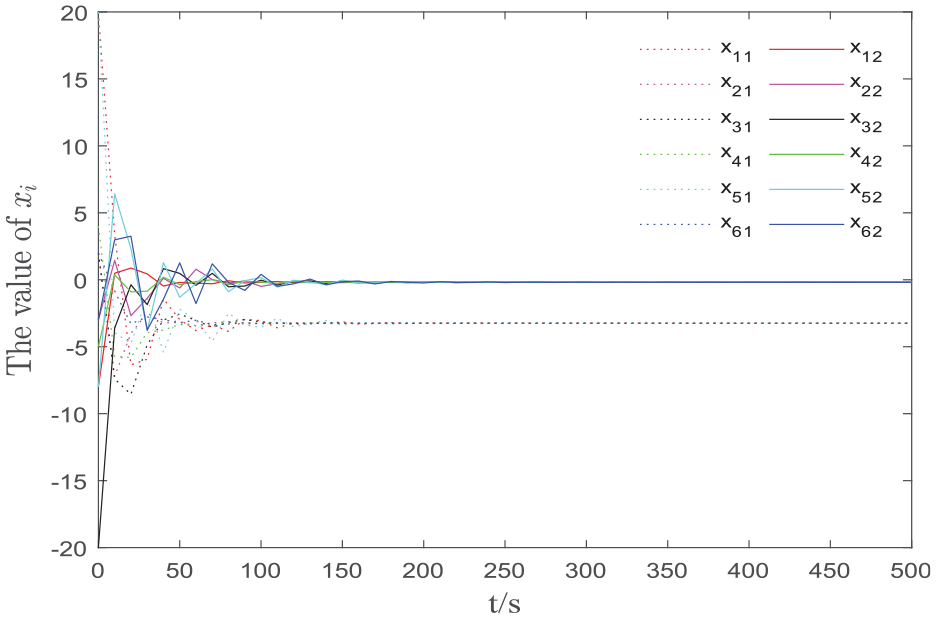
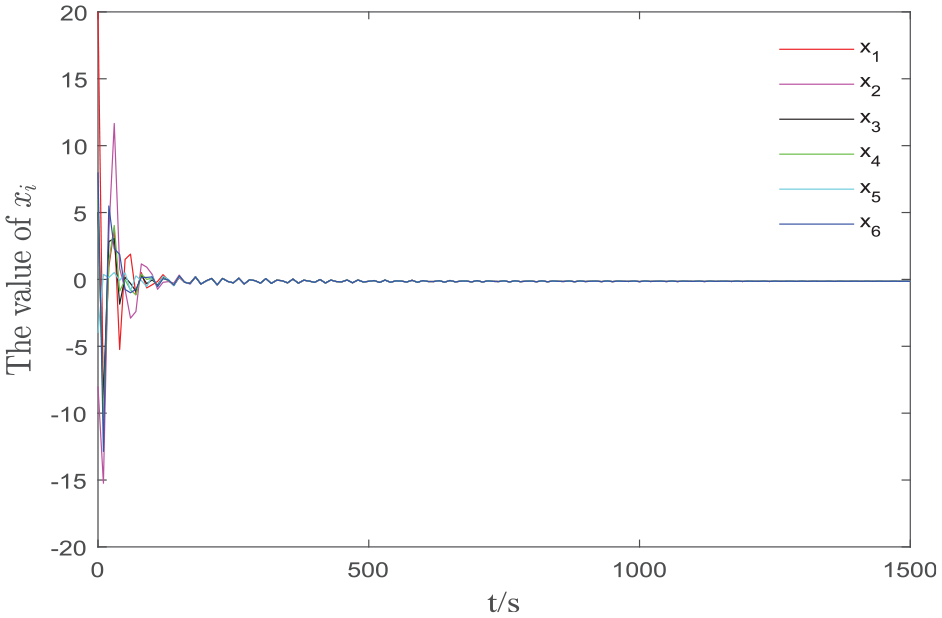
The trajectory of state in Case 1 with algorithm (6).
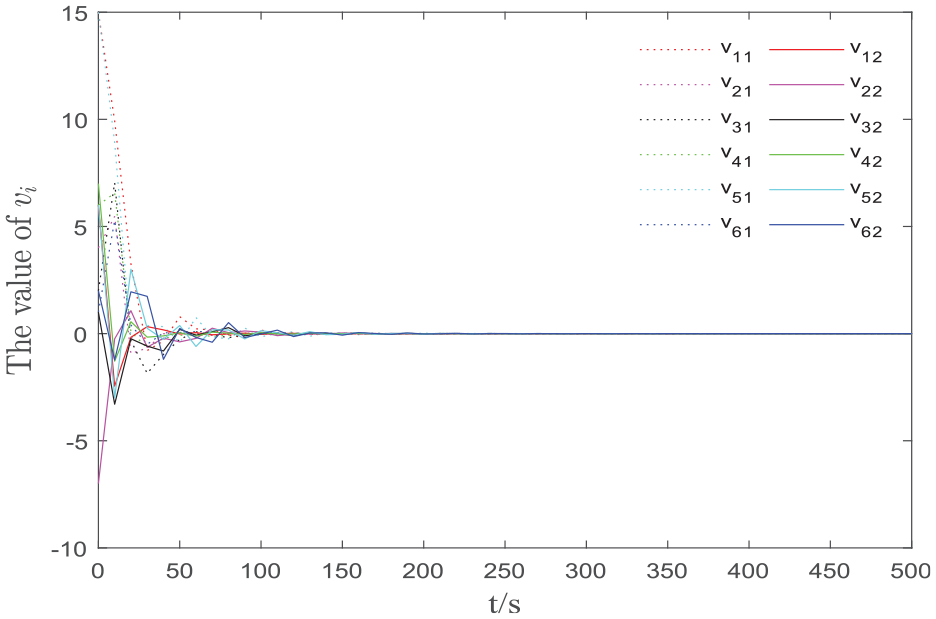
The trajectory of velocity in Case 1 with algorithm (6).
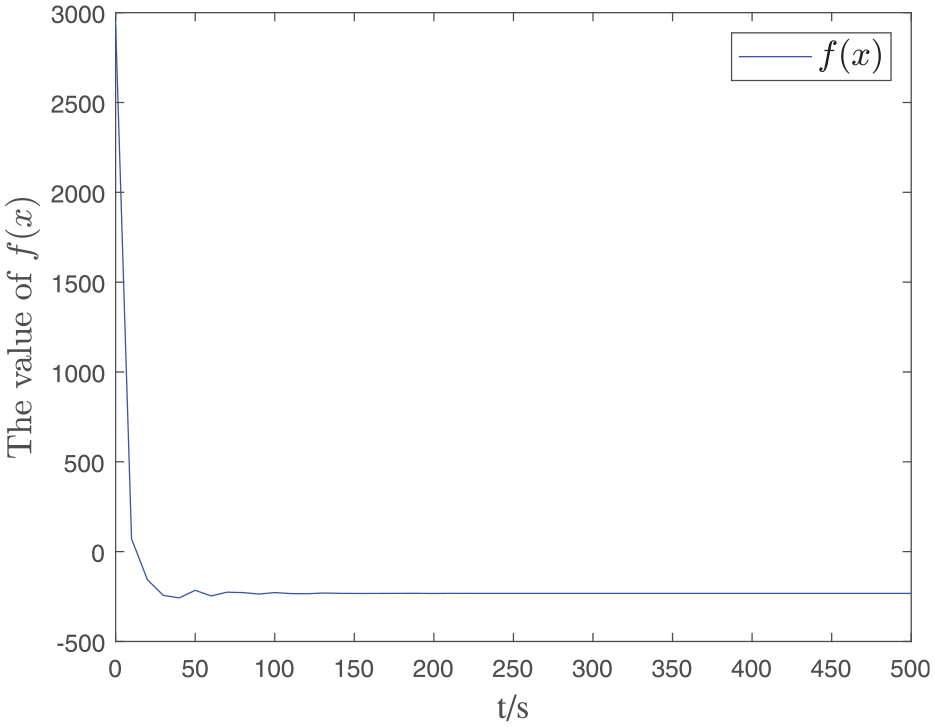
The trajectory of cost function in Case 1 with algorithm (6).
In order to show the advantage of PID algorithm, the numerical simulation based on PI algorithm, that is, let
Case 2: Some of the local cost functions are non-convex.
The trajectory of state in Case 1 with PI algorithm.
Assume that
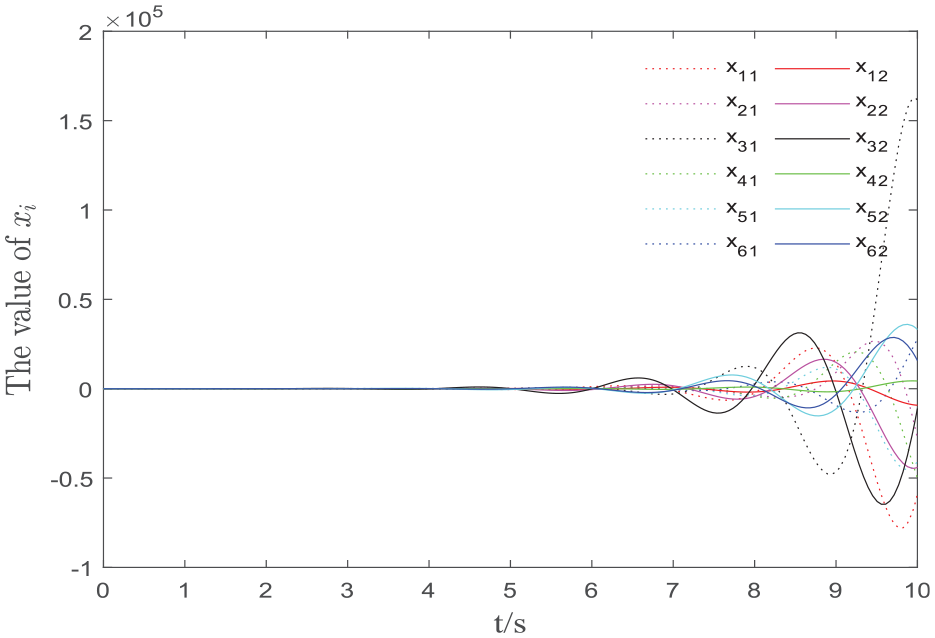
The trajectory of state in Case 2 with algorithm (6).
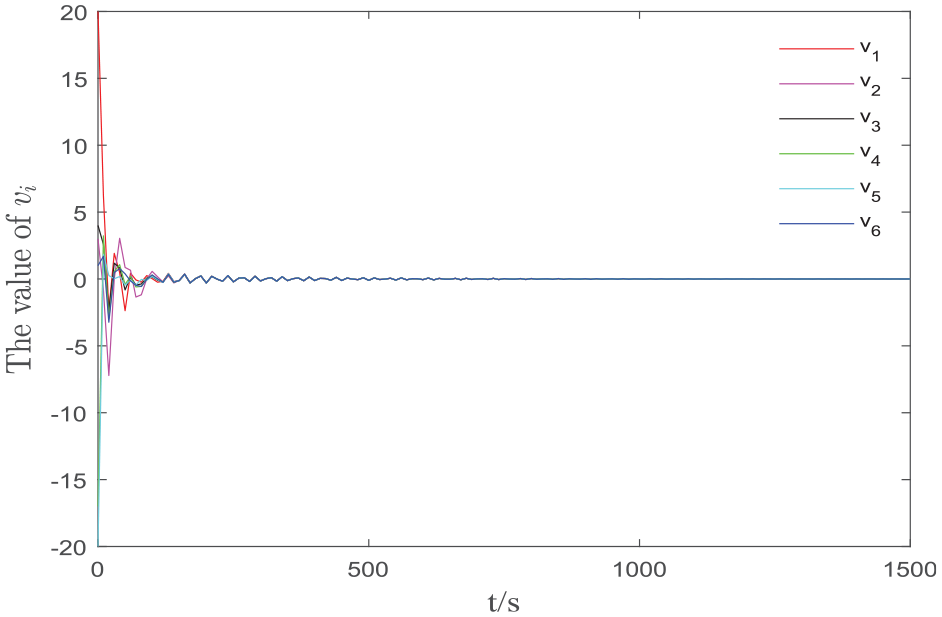
The trajectory of velocity in Case 2 with algorithm (6).
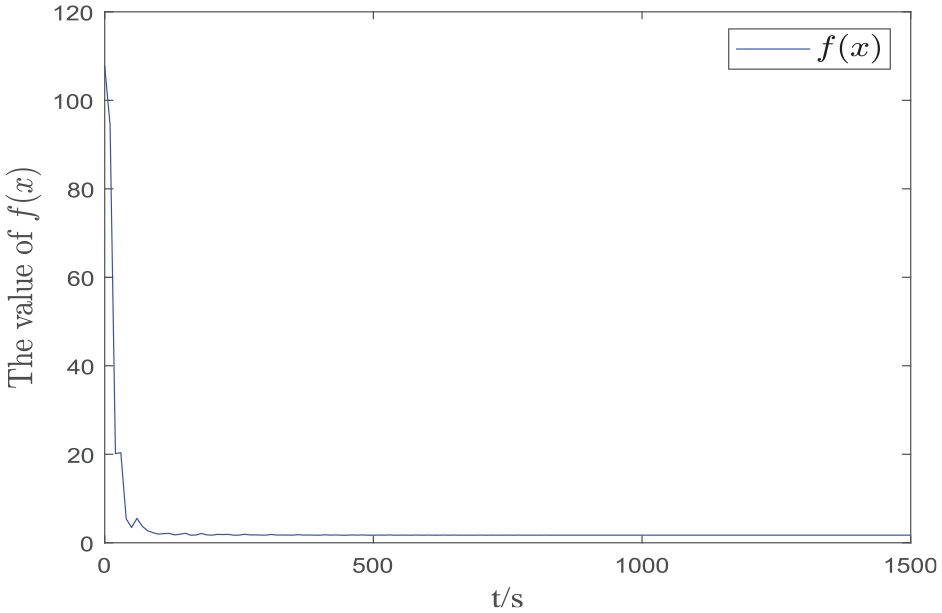
The trajectory of cost function in Case 2 with algorithm (6).
Conclusions
In this paper, a continuous-time PID algorithm is proposed for solving the distributed optimization problem, where the global utility function is strictly convex and local utility functions have locally Lipschitz gradients. Using matrix transform and inequality technique, the exponential convergence of the proposed algorithm is established with undirected and connected graph. The estimation of the convergence rate is also given. It should be pointed out that this paper only consider the undirected communication graph and ideal communication. The directed communication graph andevent-triggered PID control for distributed convex optimization will be discussed in future study.
Footnotes
Acknowledgements
The authors would like to thank the Associate Editor and reviewers for their insightful comments and suggestions based on which the presentation of this paper has been greatly improved.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported partly by National Natural Science Foundation of China under Grant No. 61673080, 61876200 partly by the Science and Technology Research Program of Chongqing Municipal Education Commission under Grant KJZD-K202000601, partly by Natural Science Foundation of Chongqing under Grant cstc2019jcyj-msxmX0102, partly by Venture & Innovation Support Program for Chongqing Overseas Returnees under Grant cx2017099.