
Abstract
In this paper, the design of hybrid H-infinity synchronization control for continuous chaotic systems based on sliding mode control (SMC) is considered. H-infinity discrete sliding mode controllers integrated with the digital redesign approach are newly designed to achieve robust chaos synchronization. By the proposed design procedure, an H-infinity discrete-time SMC can be easily obtained to guarantee the robustness of synchronization even if the system is disturbed with unmatched perturbations. Besides, since the saturation function is adopted to eliminate the unexpected chattering phenomenon, this paper also discusses the effect of saturation function in multi-input multi-output (MIMO) SMC and the upper bounds of sliding mode trajectories are obtained which is not indicated in the literature. Finally, we perform the simulation to verify the effectiveness of the proposed controller.
Introduction
In recent decades, chaotic systems have been widely discussed and studied. Chaotic systems are the systems producing nonlinear characteristics with complex dynamic behavior. The chaotic systems have many characteristics such as extreme sensitivity to the initial conditions (butterfly effect), aperiodicity, the broadband random responses, and so on.1,2 Special constellations of feedback loops in a nonlinear chaotic system can result in saddle-node and Hopf bifurcations and induce particular strange attractors.
3
The synchronization of the chaotic system is the most common topic in science and engineering, especially in the secure communication application. Nowadays, there have many control techniques proposed to solve the problem of synchronization. He and Li,
4
a synchronization control strategy is developed and applies to the considered linearly coupled complex network. The adaptive synchronization control is proposed to attain the purpose of synchronization and this method requires lenient conditions for quantized parameters.
5
Jahanshahi et al.,
6
the SMC combined with the fuzzy control to achieve the synchronization for the systems with fractional order. Wang et al.
7
consider finite-time synchronization and finite-time adaptive synchronization for the impulsive neural networks are also proposed. Yao et al.
8
is to present the synchronization control in parallel electro-coating conveyor. However, for systems with external disturbances,
In physical systems, there always exist some noise and external disturbances which might cause instability and influence the performance of controlled systems. It will be more challenge to deal with the synchronization of the chaotic system considering the unmatched disturbances. H-infinity control and the linear matrix inequality methods are frequently introduced to obtain a feasible solution and solve the robust control problem. It is a powerful control method which provides the stability and guarantees the controlled performance for systems containing the external disturbances. Zhang et al., 9 by using the Riccati equations, a robust H-infinity control is proposed for dealing with the problem of the underwater vehicle. To have a solution for the control problem of automated vehicles, the H-infinity control method is also adopted to deal with the unexpected disturbances. 10 Refer to Nan and Wu, 11 the H-infinity approach is also utilized to handle the filter issue. Wang et al., 12 the authors introduced H-infinity control to solve the non-fragile synchronization problem for a class of discrete-time T-S fuzzy systems. Therefore, the H-infinity control approach has been widely introduced to ensure satisfied robustness performances in many engineering systems with unmatched disturbances. However, the hybrid control design is not well solved in the papers mentioned above.
For designing a robust system, SMC is an outstanding approach due to the good transient performance, fast response and the robustness to external disturbances.
13
The SMC uses discontinuous control signals to drive the system trajectory to hit the switching surface and the controlled systems can be robustly stabilized while in the sliding manifold. Most of all, restricting disturbances effectively is the advantage of the SMC.14–17 However, there also exist some negative phenomena when designing SMC. The discontinuous
Although many approaches and techniques have been proposed for chaotic system stability and synchronization, there still have some problems needed to discuss. For example, the synchronization of master-slave systems is frequently designed by using continuous-time controllers.29,30 In the literature, most papers regarding the design of discrete sliding mode control (DSMC) only consider the discrete-time chaotic systems.31,32 However, the DSMC is difficult to establish for continuous-time systems when the hybrid control is considered. However, due to the better reliability and lower cost of digital devices, using digital microcontroller to implement the controllers for continuous systems has become an important trend. Therefore, we will consider the hybrid synchronization control for continuous-time chaotic systems by using digital-redesign-based controllers. Due to the hybrid control structure in sample-data systems, the continuous-time controller cannot be utilized directly; hence, the controller should be discretized to the discrete-time domain. A sampled-data system is a control system in which a continuous-time plant is controlled by a digital device. Therefore, digital redesign approach is a type of sampled-data control. However, this design approach for sampled-data systems is easier than other design methods which directly discuss the discrete controller design in discrete time domain. The digital-redesign method can directly transform the designed analog controller to the discrete type and also ensure the control performance of the hybrid controlled systems. Morais et al., 33 by using the digital redesign, the designed continuous-time controllers are redesigned to the discrete-time controllers. The discretization of the continuous controller by utilizing the digital-redesign method for the controlled system considering the time delay is investigated. 34 Tsai et al. 35 presented a new digital-redesign control scheme to transform analog high-gain controllers to digital low-gain controllers. Thus, it verifies that the digital redesign approach is an effective approach for hybrid control design.
In this paper, we will consider the hybrid H-infinity synchronization control for continuous chaotic systems based on digital redesigned SMC. A novel sliding mode controller integrated with the digital redesign method is proposed to achieve hybrid control for chaotic system synchronization. This proposed design procedure is easily implemented and the robustness of synchronization can be ensured even if the controlled system is disturbed with unmatched perturbations. To avoid the undesired chattering, the saturation function is introduced in our controller and the influence due to the saturation function is well discussed.
The layout for this study is as follows. In section II, we present the master-slave system model and problem formulation for synchronization control. In section III, we design the continuous SMC. Then we apply the digital redesign approach to get the discrete SMC controller in section IV. In section V, we present the simulation results of the hybrid controlled system to verify the feasibility of the designed approach. Finally, we have the conclusion in section VI.
Notation
System description
Considering chaos synchronization, the slave system with external disturbances is described by

in (1),

In (2),
Considering (1) and (2), we have the error state vector defined by
where
Sliding mode control design
In this section, we will use SMC to suppress the nonlinear disturbances and utilize the digital redesign method to discretize the controller for hybrid control. Here we firstly aim to design a controller

where
From (5), the equivalent controller

Substituting (6) into (3), we obtain the equivalent error dynamics in the sliding manifold as follows

where
Based on (7), we can calculate
Theorem 1
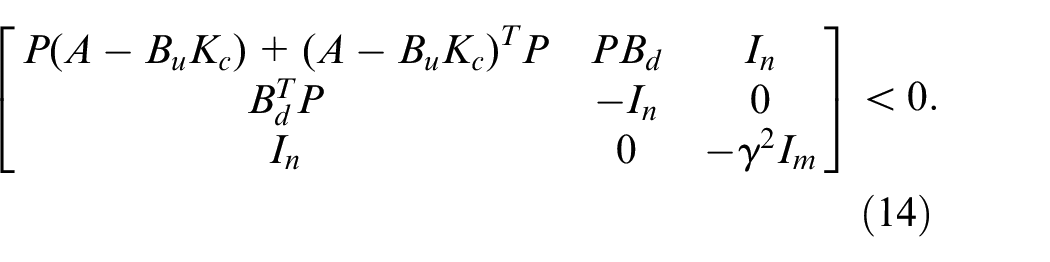
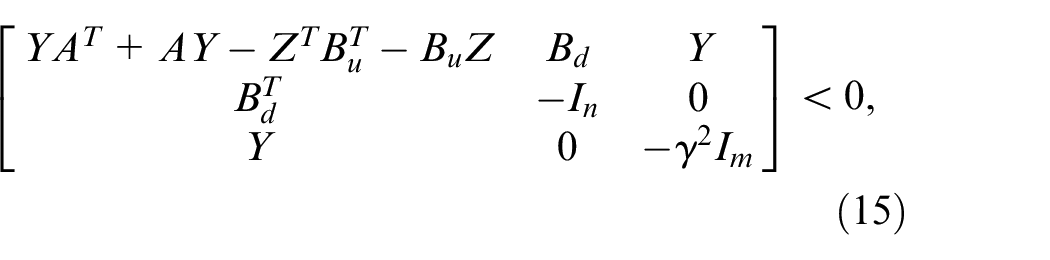
If the following LMIs are satisfied with specified matrices
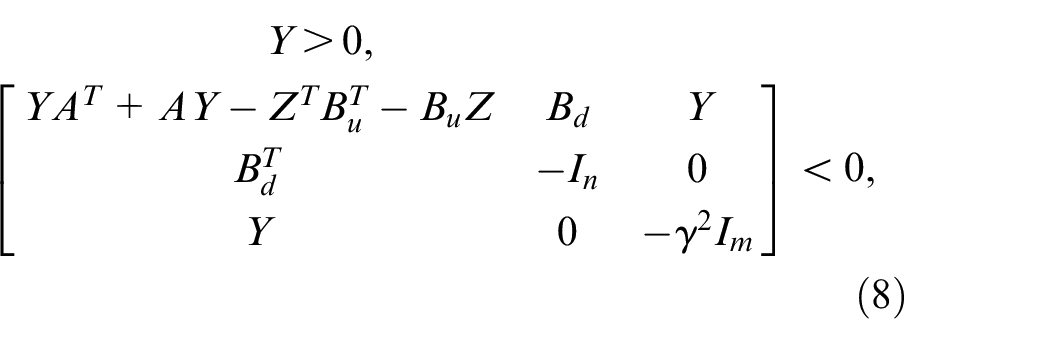
where
Consider the Lyapunov function as

where
To analyze the

where
For any zero initial condition, we have
then one has the following inequality

As long as the equation (13) is satisfied with the pre-specified parameter
We set

Therefore, one can get
where
After completing the discussion of controller gain

By (16), (5) can be rewritten as

where
To prove the existence of the sliding manifold for the controlled system, a Lyapunov equation is given as

Differentiating (18), one has

where
According to the Lyapunov theorem, (20) indicates that

in (21), the parameter
Thus, according to

While the saturation function is utilized in (22), the Lyapunov equation (19) can be rewritten as
We can rewrite (23) as follows




Since
which implies

Based on the above discussion, the norm bound of sliding mode trajectories can be found from (25) and represented as

Hence, we can ensure the desired performance in the SMC by selecting the proper parameters (
Digital redesign of SMC
In this section, the occurrence of the sliding manifold will be discussed and ensured in the discrete-time domain firstly. After completing the continuous-time SMC design, we continue to apply the digital-redesign method to obtain the discrete-time controller. First, we discretize (17) by using Euler method
36
with sampling time
To ensure the existence of the sliding manifold in discrete-time domain, the reaching conditions are introduced in Lemma 1.
Lemma 1
The following conditions are proposed to prove the convergence of the sliding mode function. 37
From (27) and Lemma 1, we can get
where
Therefore, according to Lemma 1,
By utilizing the digital-redesign method21,22 and Remark 1, we can obtain the digital-redesign-based SMC as

where

and it can be discretized as

where

Therefore, we utilize the above condition to achieve the digital redesign. Besides, Lemma 2 is introduced for completing the proposed digital redesign approach.
Lemma 2
If a function

To achieve the designed control law, the designed control input should be bounded and changed slowly. According to Lemma 2, we assume

then we utilize the digital-redesign method and have the following equation according to (32) and (33)
Let
where
Theorem 2
With the bounded and slowly time-varying disturbance, the estimator

Where the estimator gain

Then the proposed estimator (37) with (38) can estimate the undesirable disturbance
The error dynamics of (37) can be represented as
which implies
where
First, we assume

and
Therefore, when
Since the proposed estimator gain
According to Lemma 2 and Theorem 2, we obtain control law from (35) which can be designed as

where
and then one has

where

where

Finally, by applications of the disturbance estimation approach and saturation function, the digital-redesign-based SMC controller

Simulation results
To verify the robustness of the proposed controller designed above, we apply our approach to Chen’s chaotic system and the dynamic equations are shown as follows

where
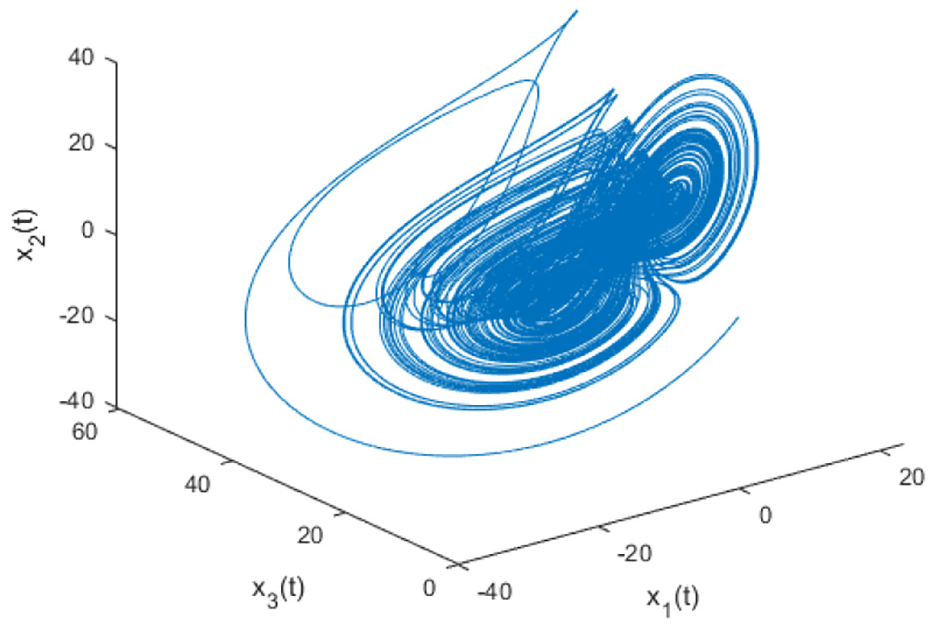
The chaotic strange attractor of Chen’s system.
To perform the simulation, we rearrange Chen’s chaotic system as

where

where

To get the response of the synchronization, by utilizing the proposed controller (47) and the parameter
The initial conditions of the slave system and master system are, respectively, selected as

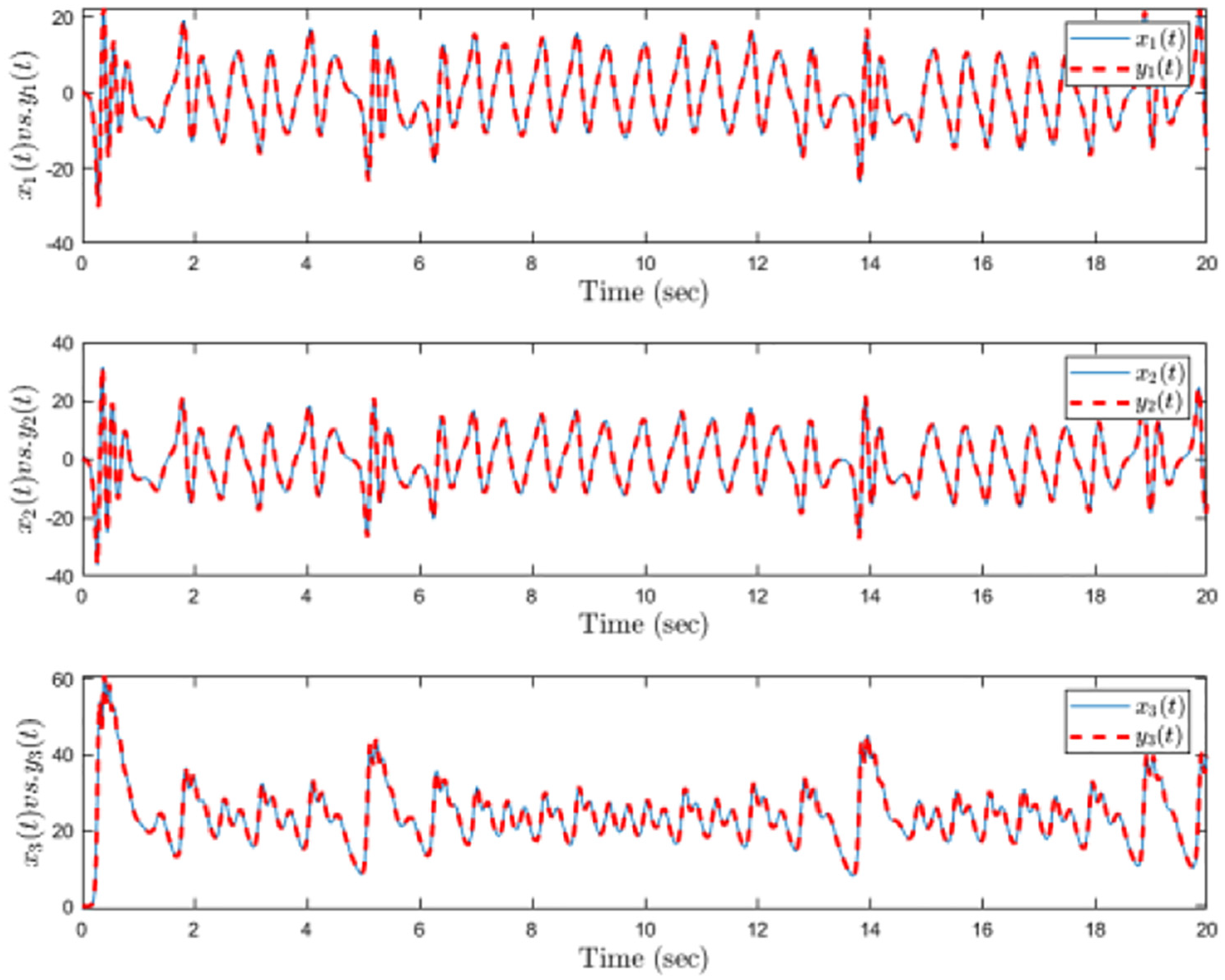
The state responses of
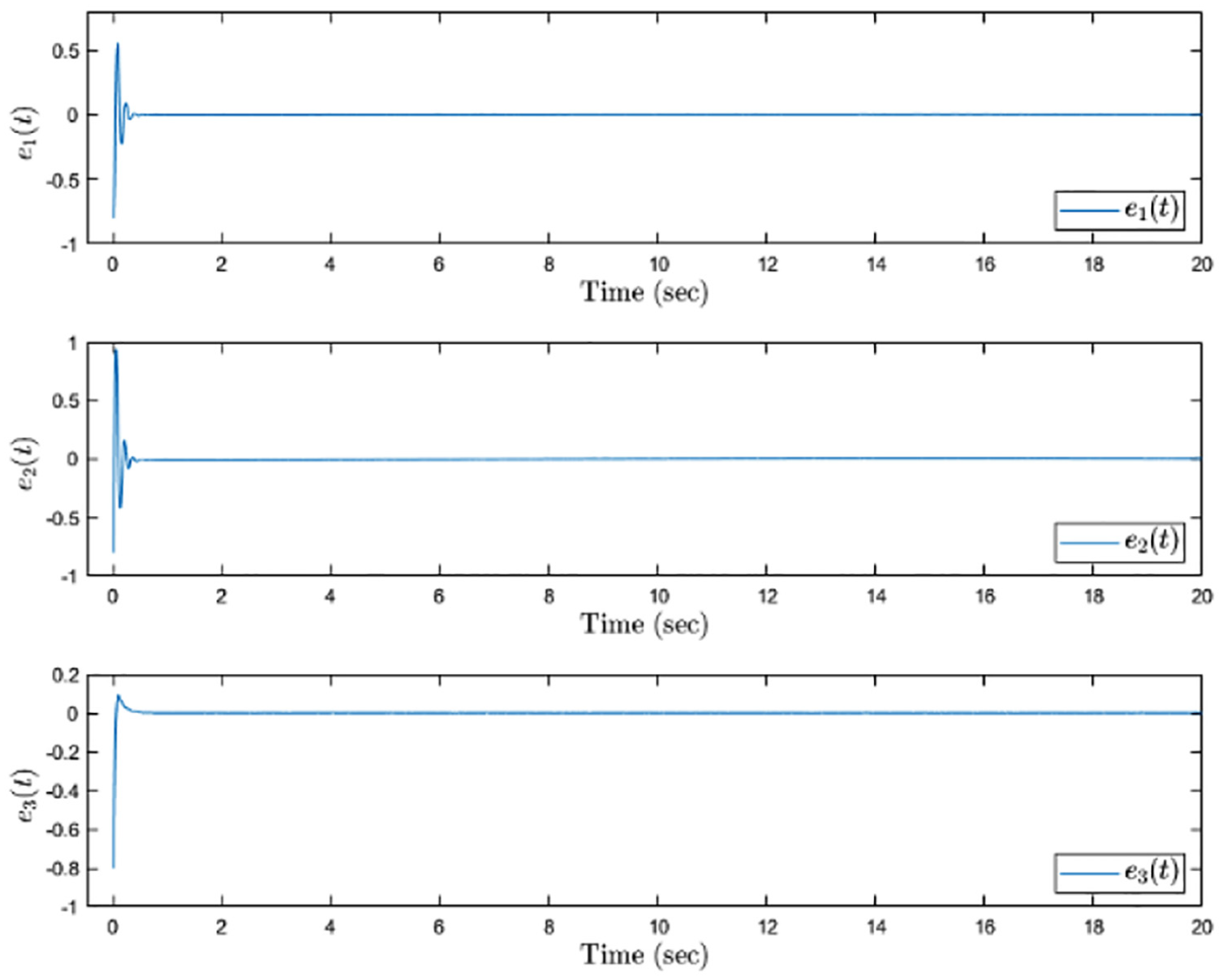
The errors between master and slave systems.
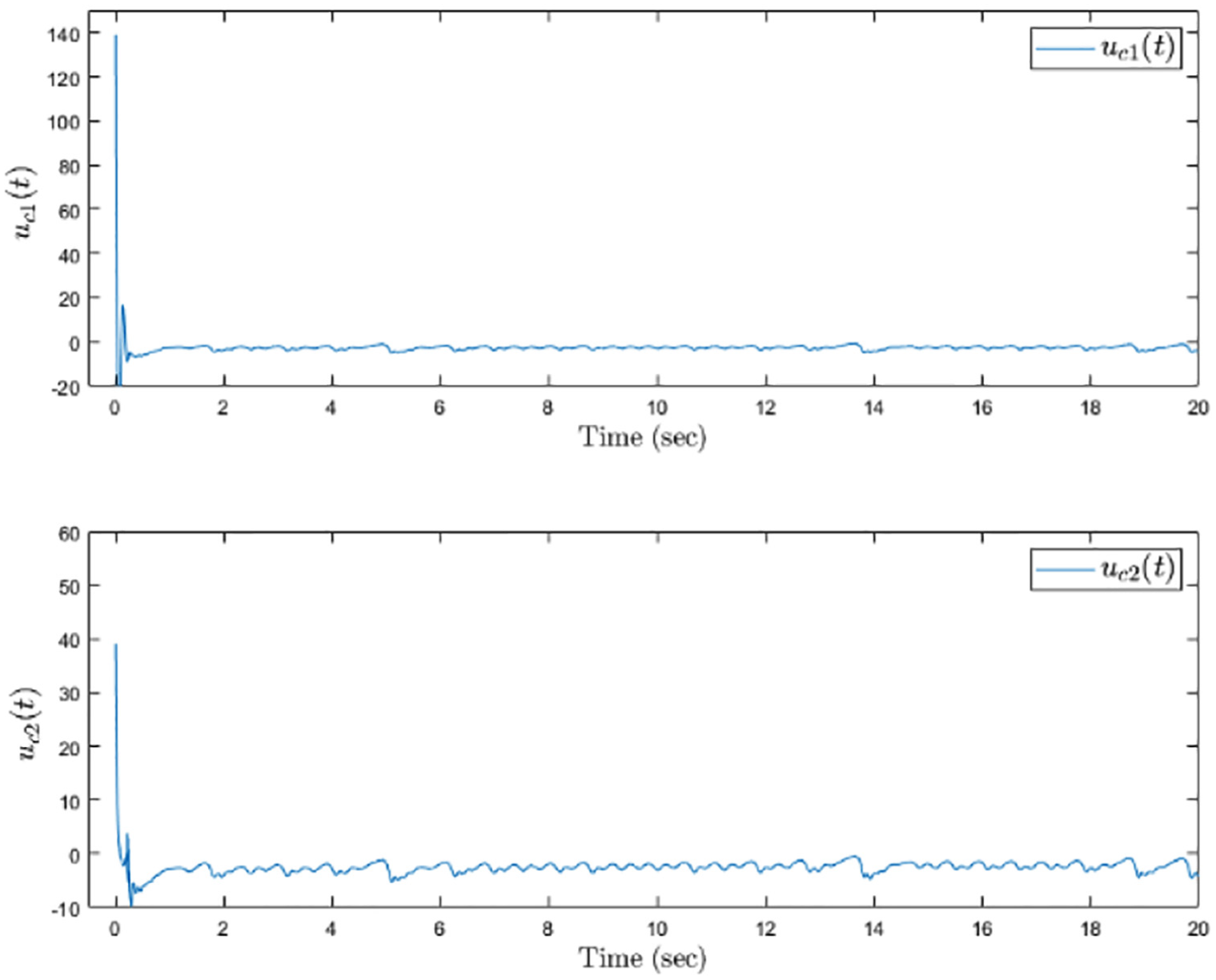
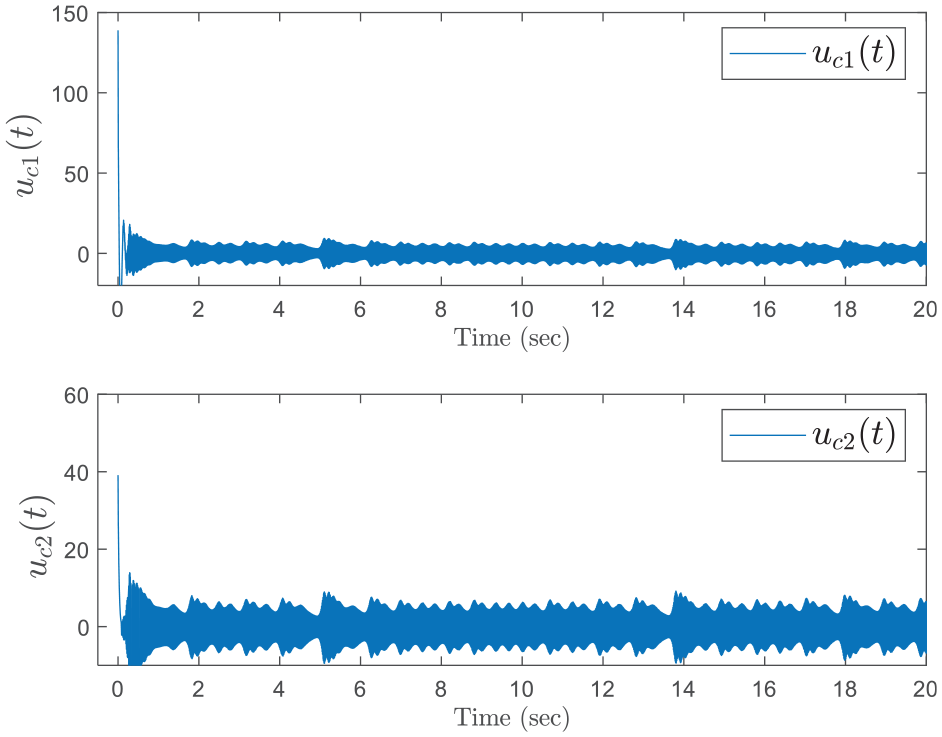
The control response with the saturation function.
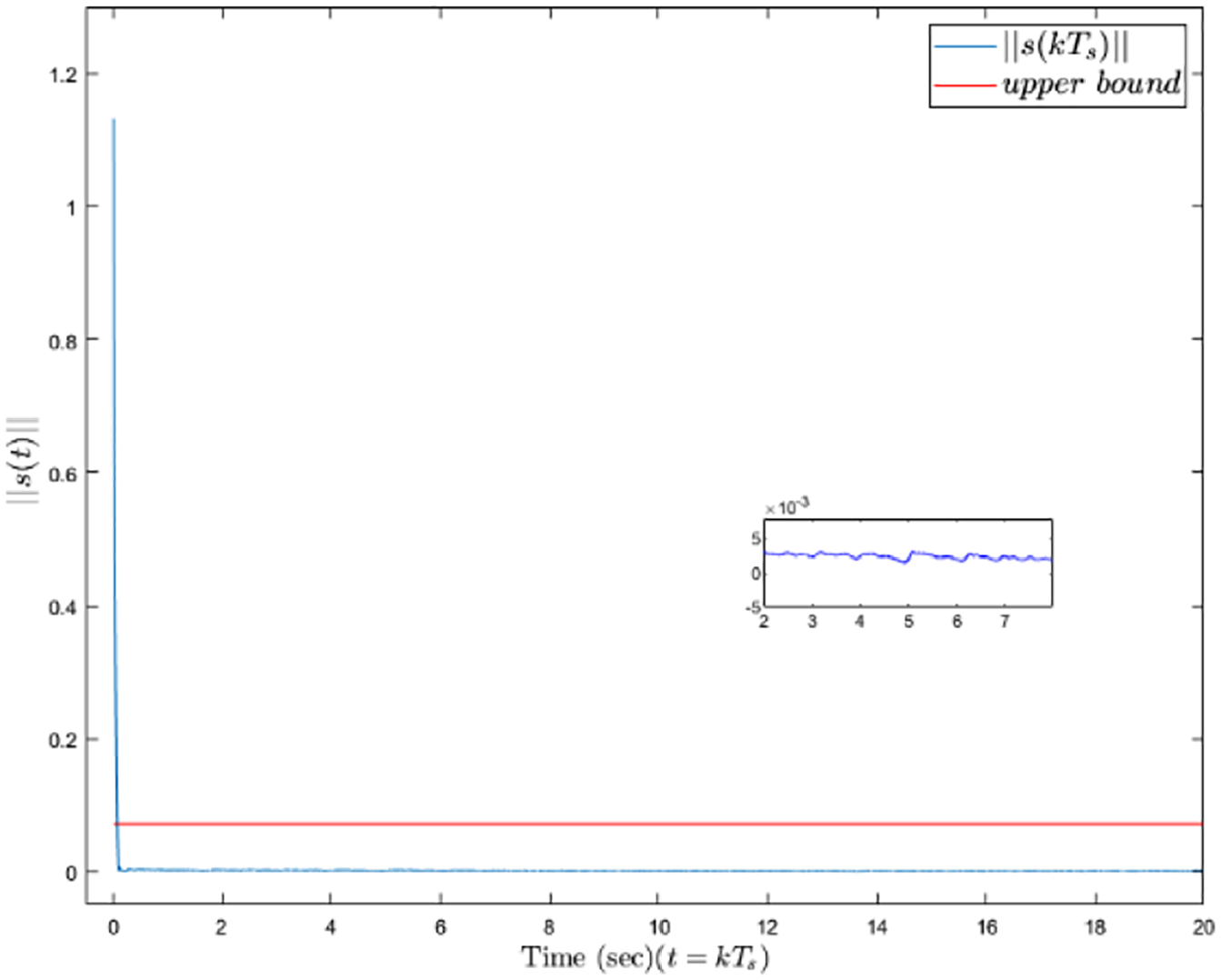
The response of the sliding mode function.
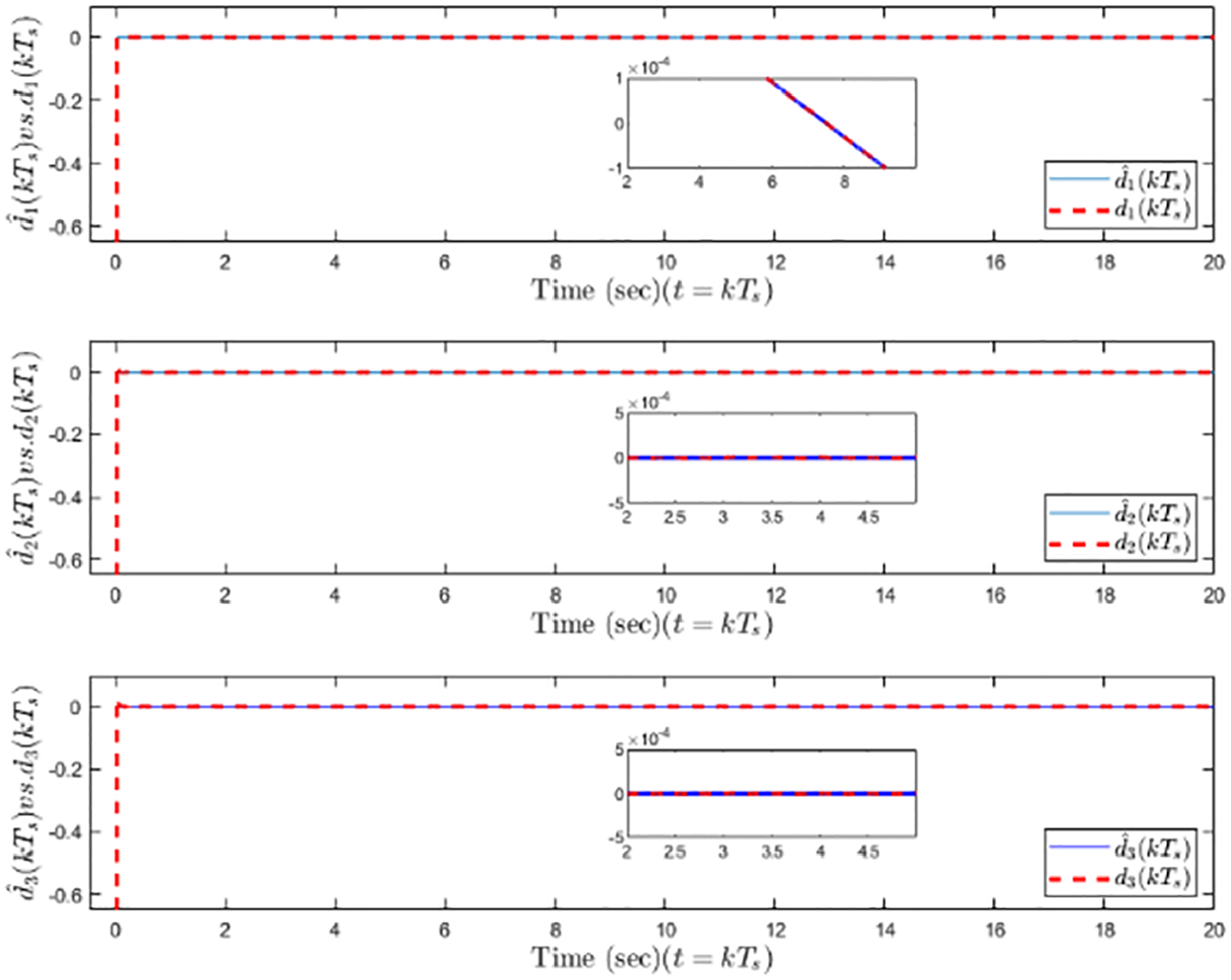
The disturbance estimator
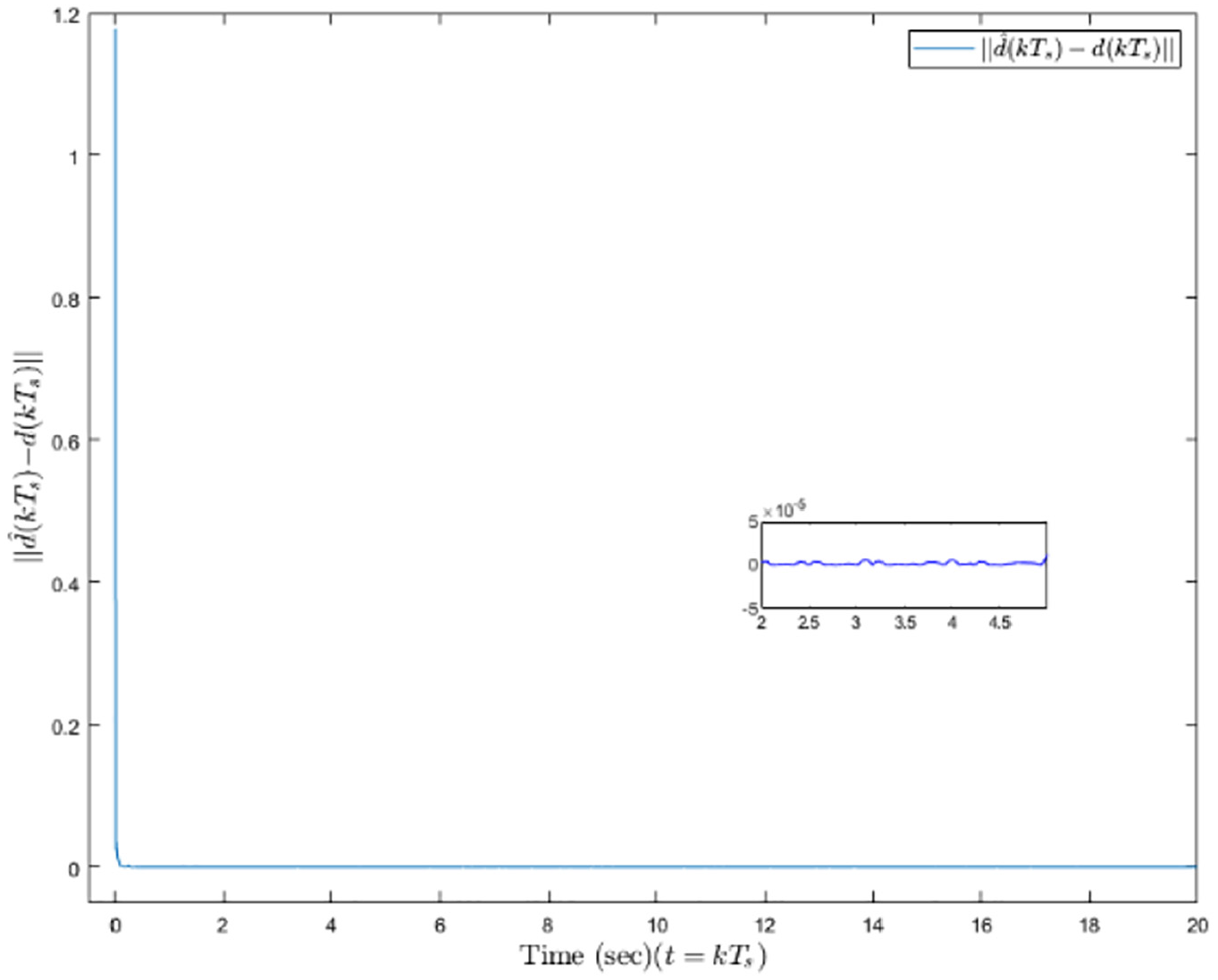
The error between
The control input response with the sign function.
and
which means the
Conclusion
This paper proposes a discrete-time SMC integrated with the digital-redesign approach to deal with unpredicted unmatched disturbance and achieve the hybrid H-infinity chaotic synchronization as well. The proposed digital-redesign method can directly transform the continuous analog controller to the discrete type. This proposed design procedure not only can easily obtain a discrete-time H-infinity SMC but also guarantee the robust performance of synchronization even if the system is with unmatched perturbations. Furthermore, the sliding mode trajectories are bounded within the predicted bounds when a saturation function is introduced to reduce the chattering. The simulation results demonstrate the robustness synchronization of the chaotic systems by using the proposed hybrid H-infinity SMC. In the future research, we can extend the proposed digital redesign approach for other control problems such that it will become easy to implement the designed discrete controller by using a digital microprocessor controller for better reliability, lower cost, smaller size, more flexibility, and better performance.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by the Ministry of Science and Technology, Taiwan, under grant MOST-109-2221-E-167-017.