This paper focuses on the time-varying output formation (TVOF) tracking control of heterogeneous linear multi-agent systems (HL-MASs) with both delays and switching topologies, where the followers’ outputs can move along the reference trajectory generated by the leaders and maintain the desired time-varying formation. First, a distributed observer is proposed for each follower, aiming to estimate the convex combination of leaders’ state with both communication delays and switching graphs. The observer’s error for heterogeneous MASs is analyzed based on Lyapunov theory and linear matrix inequality (LMI) technique. Second, the observer is incorporated into the output formation tracking protocol. Then, an algorithm is put forward to calculate the control feedback gains and the formation tracking feasibility constraint is also provided. Furthermore, the convergence of the formation tracking error is proved. At last, the effectiveness of this proposed method is validated through a numerical simulation.
In recent year, cooperative control of multi-agent systems (MASs) has attracted intensive attentions and can be found in varies fields. For instance, satellite systems in Refs.,1–3 aerial vehicles in Refs.4–6 and mobile robot systems in Refs.7–10 As an active research area of MASs, consensus control is the combination of graph theory and control system, which allows a number of agents to accomplish the same goal by using the information exchange and sharing. As a pioneering work in consensus, the authors in Olfati-Saber and Murray11 firstly proposed several neighbouring based protocols for dynamic agents to achieve consensus. A necessary criterion for second-order MASs to achieve consensus was proposed in Ren and Atkins12 Because of the low cost and high efficiency, consensus approaches based on local neighbouring information has been a hot issue in formation control (see, e.g. Refs.13–19).
As an important part of consensus control, formation control of MASs is a popular aera and has a wide range of applications during the past decade due to the good scalability and low computing consumption (see, e.g. Wang et al.20 and Dong et al.21). A unique formation protocol was proposed based on consensus approach for second order MASs in Ren and Beard.22 Based on his creative work, linear and non-linear MASs on formation controls have been studied in Refs.23–27 It should be pointed out that the above literatures simply studied the problem of formation maintenance, which indicates that the environment in the aforementioned investigations is not change. However, in some practical applications, the communication delays and switching topologies emerge because of the existence of channel congestion and communication range constraints. The authors in Dong et al.21 presented a distributed formation protocol for general-linear MASs under the influence of time delay, and a necessary and sufficient condition for the formation was also put forward, which means not all formatione were allowed to realize. Utilizing the information of the neighbours, an approach was demonstrated for MASs under the circumstances of both communication delays and switching networks in Xiao et al.28
It should be realized that the above investigations only focus on achieving the desired formation, some special tasks may not only allow agents to form the desired formation but also the whole formation is driven to track the trajectory generated by the multiple leaders. In formation tracking problem, agents are divided into leaders and followers. They play different role in achieving the target which the followers can form the expected formation and the leaders are allowed to generate the tracking trajectory. By using the properties of the Laplacian matrix between the leaders and followers, the time-varying formation tracking problem for multiple leaders was investigated in Dong and Hu.29 However, as a practical matter, the interaction between the agents cannot be constant, switching interaction topologies can influence the individual’ performance and caused the instability of the system. Therefore, it is important to consider the switching networks in formation tracking control. The switching directed interaction topologies were taken into consideration in Dong et al.,30 which aiming to solve formation tracking for a team of unmanned aerial vehicles. Due to the fact that the communication bandwidth is limited, time delays emerge. The work in Li et al.31 studied the formation-tracking problem under the influence of communication delays.
According to the mentioned works on formation tracking, only homogeneous systems are considered, where the state equations of the followers are identical. Because the orders of agents are usually different in reality, heterogeneous system with high and low agents can make full use of the potential of each individual. As a result of the close relationship between the leaders and the followers, heterogeneous formation-tracking control has been applied in many engineering aeries, such as air-ground coordinated attack and coordinated penetration. In this task, the unmanned aerial vehicles (UAVs) which have a wide field of visions can play a role as searching, and due to the high flexibility and low consumption, unmanned ground vehicles systems (UGVs) can be used to rescue missions. However, the heterogeneous MASs cannot use the Kronecker product to realize a compact form, which means the above-mention results on homogeneous MASs in Refs.29,30,32,33 cannot directly used. Therefore, cooperative output regulation problems have been paid much more attention in Refs.34–39 Based on cooperative output regulation strategy, the work in Su and Huang40 proposed a formation-tracking protocol for linear MASs by using a distributed observer. For heterogenous MASs with one virtual leader, a formation-containment problem was considered in Wang et al.41 The attention should be paid here that formation-tracking task is not only allowing the follower agents to form the desire formation, but also requiring to track the leaders’ trajectory. For instance, considering the coordinated combat between unmanned and manned aerial vehicles, the unmanned aerial vehicles can form a specified formation to guarantee the safety of the manned aerial vehicles. In order to deal with the heterogeneous MASs with switching interaction topologies, an ideal formation tracking protocol was proposed in Hua et al.42 To incorporate continuous repulsive vector into agents’ velocity, heterogeneous MASs with time-varying communication delay to realize formation-tracking was investigated in Guo et al.43 As can be seen from the literatures mentioned above, designing a formation-tracking protocol for the heterogenous MASs with both communication delays and switching interaction topologies is challenging and still open.
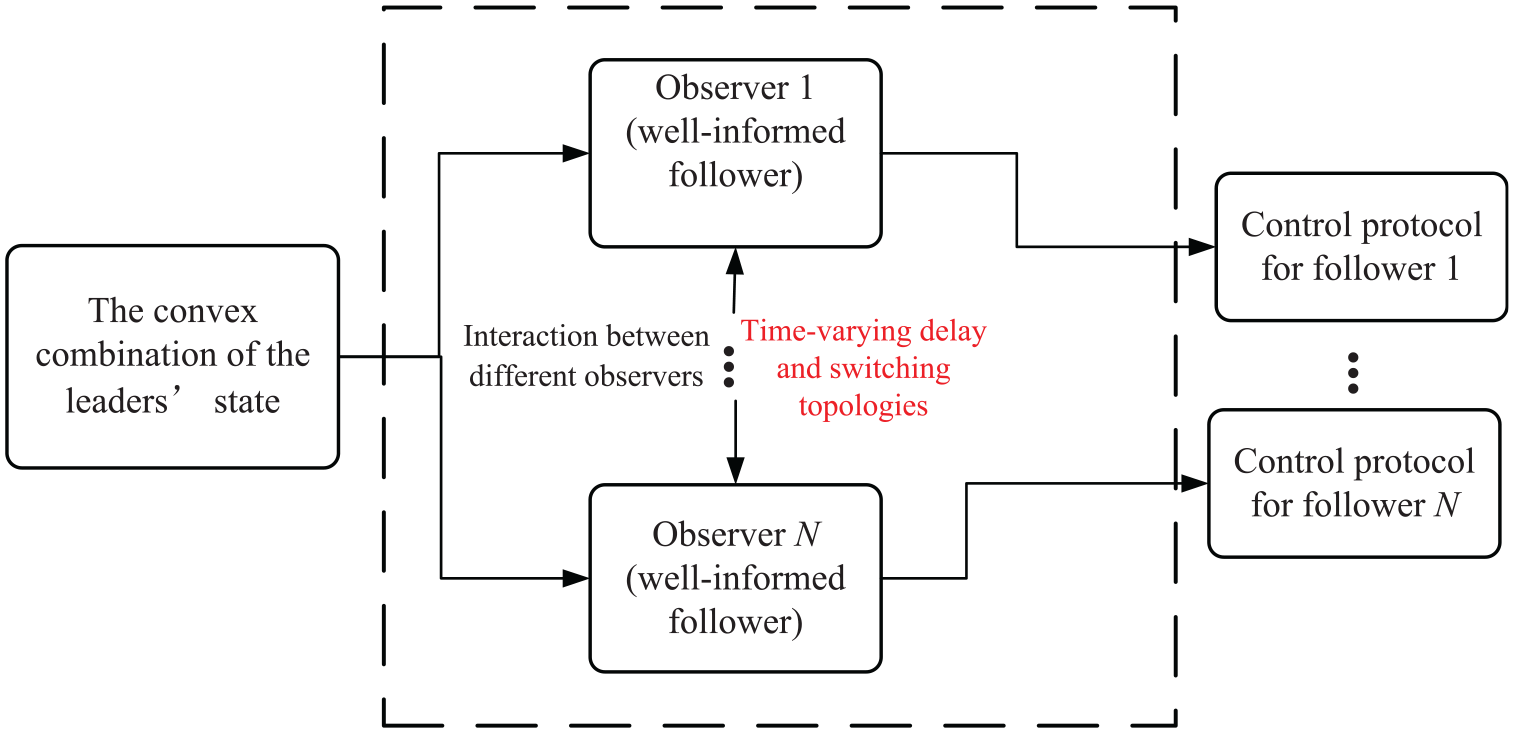
Inspired by the above facts, the purpose of this paper is to investigate the TVOF tracking problem for heterogeneous systems, which means that individuals in the system can have different system matrices or different order states. Unlike formation control, the TOVF tracking not only requires the outputs of followers to accomplish the expected formation but also needs to track the output trajectory generated by multiple leaders. In order to solve TVOF-tracking problem with both communication delays and switching topologies, a two-layer control framework is constructed (see Figure 1 for an illustration). The state observer system can estimate the convex combination of the leaders’ state under both varying time-delay and switching networks, and the control protocols are put forward based on the state observer.
Framework for the observer-based control protocol.
Compared with the prior results, the prominent contributions of this article are as following.
The TVOF tracking for heterogeneous MASs is considered in this paper, which means that the system matrices and the dimensions of the state can be different for each agent. Hence, the methods in Refs.14,30,34–38 which can be used directly in homogeneous systems can no longer be applied. Moreover, by using the regulator equations to solve the difference of the dimension, the proposed method is much more practical.
It should be pointed out that both switching networks and varying time-delays are taken into consideration. Compared with the systems considering just only switching topologies (see, e.g. Hua et al.42), the time-delayed coefficient is incorporated into the Lyapunov function to prove the convergence of the delay switched system. In contrast to the delayed system with fixed topology (see, e.g. Guo et al.43), by using the useful lemmas and assumptions, the proposed method is satisfied with switching topologies. Therefore, this approach in this paper can be applied in a more complex environment such as the link failure and congestion.
Compared with the needs of the whole state in Dong et al.,30 the provided method only relies on the output relative information of the MASs.
The structure of the rest paper is given as followings. Some notations and results on graph theory are induced in Basic theory and problem description. Main results provides the important derivations and proofs for heterogeneous MASs to achieve the TVOF tracking. Numerical simulation proves the effectiveness by numerical examples. Finally, the whole work is concluded in Conclusion section.
Throughout this paper, be an identify matrix. ⊗ denotes Kronecker product of two matrices. Let represent a columen vector.
Basic theory and problem description
A weight undirected graph with nodes can be represented by , where denotes the nodes set, is the set of edges. An edge is defined as . Let represent the adjacency matrix of graph G, where if and only if and otherwise. Let denote the in-degree matrix of G, then the Laplacian matrix is defined as . Let represent the set of neighbours of node . The path form node to is defined as . The definition of an undirected graph is that for any distinct node . Moreover, if there is a path between any two nodes, the undirected graph is defined as connected. The agents are classified into two categories, leader and follower. In this paper, there exist N followers and M leaders. Assume that one follower has at least one neighbour and the leader has no neighbour. Let and be the follower set and leader set, respectively.
It is assumed that the topologies of the MASs are switching. Suppose that there is an infinite sequence of non-overlapping time intervals with . The interaction topology of G changes at the time and maintains the communication channel in the dwell time . The switching signal is defined as . Let and represent, respectively, the graph and corresponding Laplacian matrix. Then, The neighbours of the follower and leader with node i are denoted to and . and are the real symmetrical matrices that are not related to the eigenvalues.
Definition 1. Dong et al.30A follower is defined as a well-information if it can communication with all the leaders, otherwise it is said to be uniformed.
Assumption 1.Each communication topologies in switching sets is undirected and connected.
Problem description
The dynamic of follower i is given by:
where and represent the state and output of the follower i. is denoted to the control input. , and are the constant gain known matrices with rank . The system matrixes and are stabilizable and observable, respectively.
The leader of j is modelled as:
where and are the state and the output of leader j, and are gain matrices. The pair is detectable.
Remark 1.The above HL-MASs contains M leaders and N followers. Note that the followers in this paper can both have different system matrices and dimensions. If , this problem can be converted to a target enclosing in Wang et al.41If the all agents have the same dynamic, the system in this paper can be transformed into the work of Dong et al.30
Assumption 2.The following regulator equation:
have solution matrices, .
Remark 2.Note that Assumption 2 is standard for cooperative control of HL-MASs (see, e.g., Refs.40,45,46). The solvability of regulator equations is important for the output regulation problems. As shown in Huang,47the regulation equations are solvable, if
are satisfied for all.
To explain the predefined formation, a vector is introduced, where the element is piecewise continuously differentiable. Let represents the output formation.
Definition 2.The HL-MASs (1) and (2) can realize the TVOF tracking if for any given bounded initial states, there exist non-negative coefficients that satisfies and for each follower the following equation is accomplished
Remark 3.When TVOF tracking is achieved, represents the convex combination of the leaders’ outputs. If , it can be get from Definition 2 that which means the TVOF tracking with only one leader is finished. Note that if and , the Definition 2 is converted to . Therefore, the TVOF tracking problem is transformed into a target enclosing problem.
The major task of this work is to design the TVOF tracking protocol for HL-MASs under the influence of both communication delays and switching interaction topologies.
Main results
In this section, a distributed observer aiming to evaluate the combination of the multiple leaders’ outputs is proposed under the condition of both communication delays and switching networks. Then, by using common Lyapunov function and LMI technique, the observer’s error can converge to zero. In the meanwhile, the TVOF tracking design problems are studied.
Assumption 3. Dong et al.30Each follower is either a well-informed or an uninformed follower. For any communication topology, each uniformed follower has at least a path pointed to the well-informed follower.
Remark 4.To realize the output formation-tracking with both communication delays and switching topologies, the Assumption 3 is necessary to construct the state observer. It should be pointed out that the well-informed followers are denoted as the agents with powerful sensors, while the uninformed followers are those with poor sensors. Therefore, the well-informed followers can reach the information of all the leaders and the informed followers can only receive the state of the neighbouring followers.
For Definition 1, the Laplacian matrix according to the MASs (1) and (2) is given as following
where and .
Lemma 1. Dong et al.30It can be verified form Assumption 1 that each row of is equal and the cumulative sum is 1.
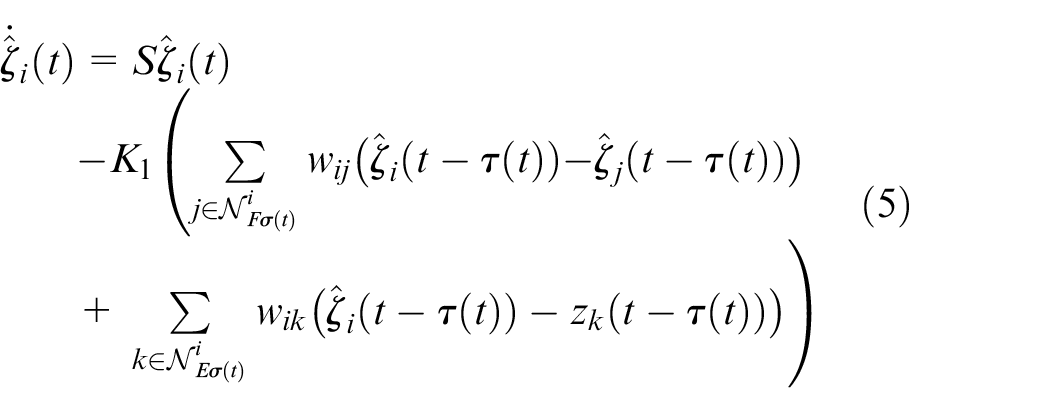
Consider the following distributed observer to estimate the convex combination of the leaders’ state.
where , is a constant gain matrix. is the communication delay.
Remark 5.Note that the state observer is constructed based on the instant of the neighbouring observer’s state and the leader’s state, so we do not need the exact value of the time-varying delay.
Assumption 4.The term of represents the time-varying delays satisfying and , in which and are known constants.
Lemma 2. Jiang et al.44is defined as a column vector with time-varying elements and a smooth first derivative. Then, it can be obtained the following inequality holds:
where, , .
Let , , where , denotes the eigenvalue of real symmetric positive definite matrix.
Lemma 3. Xiao et al.28Assume that for any agent i under all switching topologies, if and only if .
Remark 6.By using Lemma 3, the stability of the proposed N systems can be transformed into the stability of the systems for just maximum and minimum eigenvalues with switching topologies. Since MASs usually have numerous individuals, Lemma 3 is independent of the amount, which means that the proposed Lemma can greatly reduce the computational complexity.
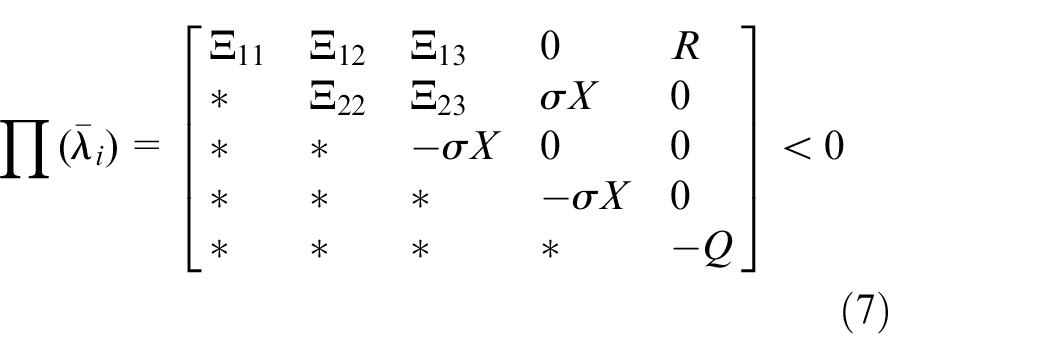
Then, can be designed following those LMI.
Suppose that the following LMIs (7) have the positive solutions , , and real matrix for any . Therefore, can be given as .
where
Theorem 1.Based on the calculated and Assumption 1, the proposed observer (5) can evaluate the convex combination of multiple leaders’ state with both time-varying delay and switching topologies, that is,
Proof. Let and , then distributed observer can be written as follow:
Define . Based on (9), it can be obtained that
Constructing the following common Lyapunov–Krasovskii candidate function:
where
Let , one knows that is symmetric. Therefore, it is possible to find an orthogonal matrix which satisfying that .
Let , , the time derivative of along (10) is
From Assumption 3, one gets
Let , then one gets
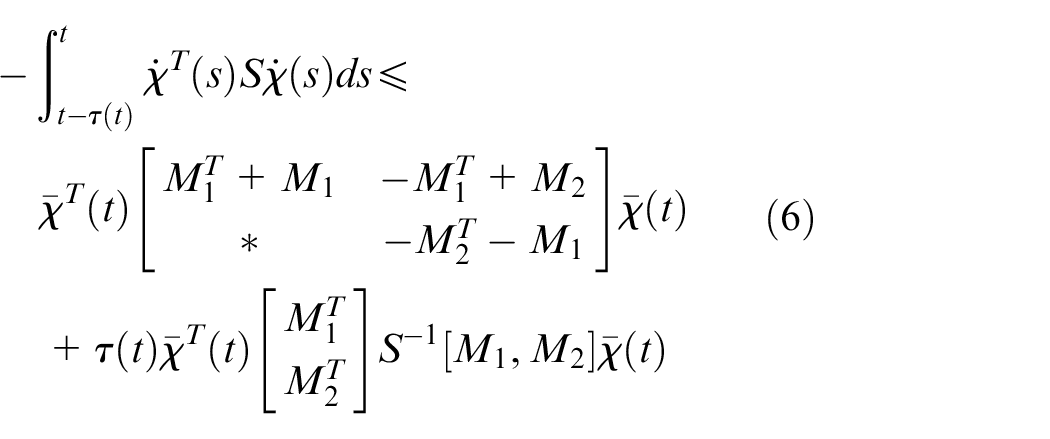
Based on Assumption 4 and Lemma 2. One has
Let . From (13)–(17), it can be verified that
where
It can be obtained that is equivalent to , based on Schur complement lemma.
Let and , and one gets
Since , then according to Schur complement lemma, are equivalent to and is equal to . One obtains
Based on the calculated , the distributed observer error is convergent signifies that each follower can get the convex combination by multiple leaders through the proposed observer. This completes the proof.
Remark 7.According to Theorem 1, all followers can obtain the same combination by multiple leaders under the circumstance with both communication delays and switching interaction topologies. The study of this paper is the extension of the work in Hua et al.42Besides the switching topologies, time-varying delays are taken into consider, which means the approach in this paper can cope with more complex external environments.
Consider the following observer-based formation-tracking protocol
where the compensation input for formation tracking is denoted to . and denote the gain matrix to be determined later. Note that rank , there exists a nonsingular matrix with and .
Algorithm 1: Steps to determine the TVOF tracking protocol.
Step 1: Choose and satisfying the regulator equation.
Step 2: Consider a predefined TVOF vector . if the following feasibility condition holds for each follower, then continue; otherwise, choose another formation.
Step 3: Calculate the compensation input as follows
Step 4: Design the distributed observer (5) for MASs (1) and (2) with both switching topologies and communication delays.
Step 5: Choose appropriate such that is Hurwitz, and is designed as .
Remark 8.It should be pointed out that the former steps (Steps 1 and 2) show the necessary conditions for the HL-MASs to achieve TVOF tracking. A novel control strategy to determine the gain feedbacks is demonstrated in the latter steps. The constant gain matrix can be given to make the state observer’s system independent of switching networks and communication delays. Then, an observer-based control protocol can be designed to be convergent by using the calculated and .
Theorem 2.If there exists an expected time-varying formation satisfying (21), then MASs (1) and (2) under both communication delay and switching networks can achieve TVOF tracking under the control protocol (20).
Proof. Under protocol (20), the closed loop of the followers is given as following
Let , then .
Note that and the formation-tracking error . Based on the step 5 of Algorithm 1 and the regulator equation (3), the derivation of the formation-tacking error system can be written as:
Since the formation tracking feasible condition (21) is feasible, which means that
From (22), one gets
Note that is nonsingular. It can be verified from (25) and (26) that
Based on Theorem 1, one has . Note that is Hurwitz, it can be verified that
Since the TVOF tracking error , substituting the regulator (3), one has
Thus, the TVOF tracking is accomplished under both communication delay and switching interaction topologies. Then the conclusions of Theorem 2 can be verified.
Remark 9.If , TVOF tracking problem for HL-MASs is converted to the target enclosing with one leader, which means the control protocol can be directly obtained by Theorem 2. Note that homogeneous systems is the special case of the heterogeneous systems. Therefore, Theorem 2 can be used to determine the protocol for the systems with the same dynamics.
Numerical simulation
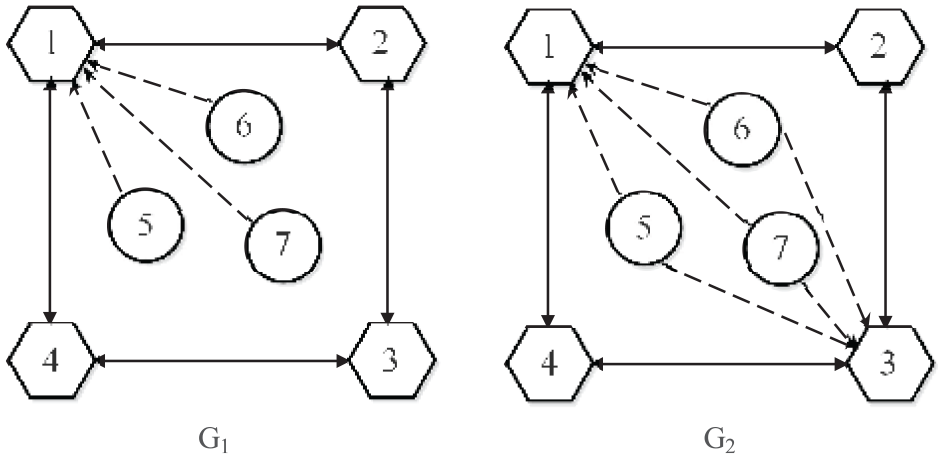
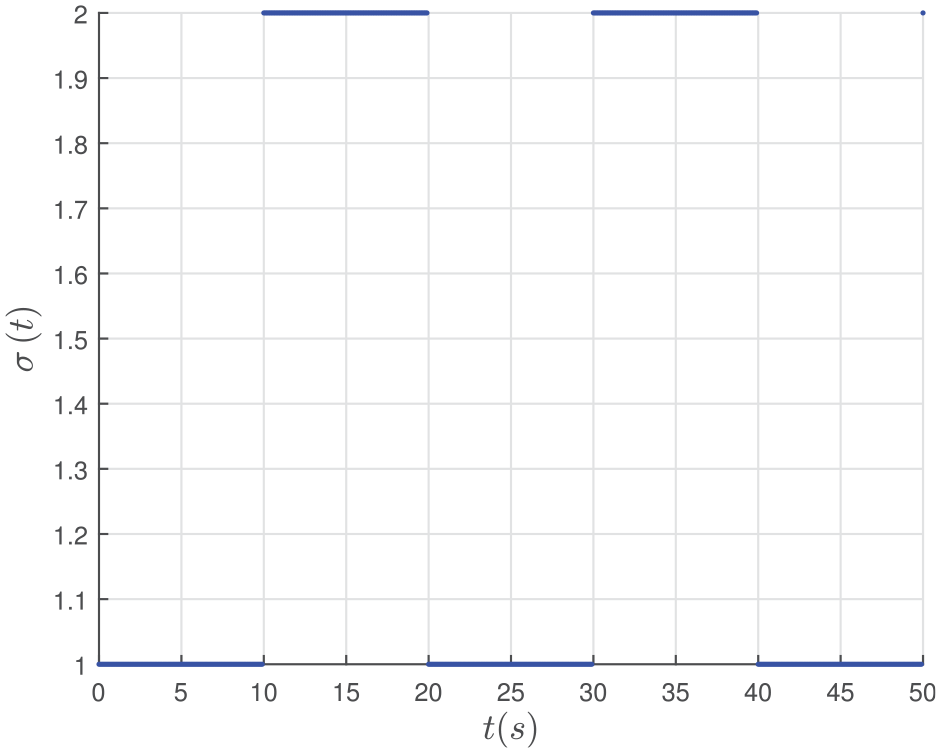
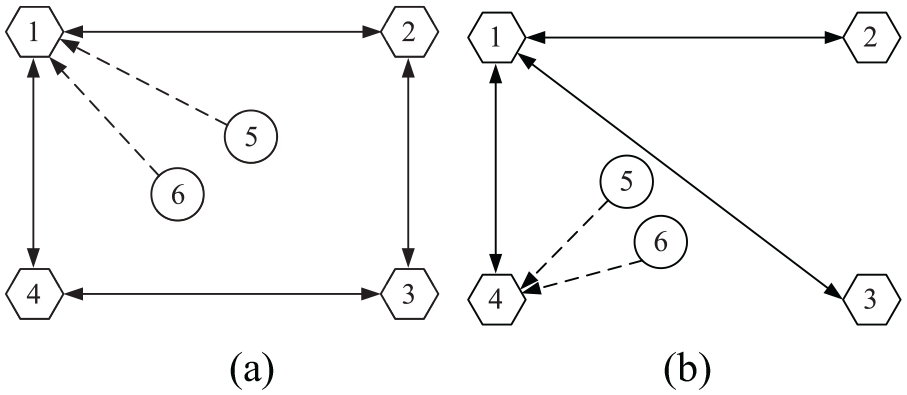
Example 1. Consider a MAS with seven agents, which include four heterogeneous followers and three leaders. The followers and leaders set are denoted by and , respectively. Let . Figure 2 gives the switching topologies. Figure 3 represents the switching signal within . The communication topology swithes at the time instant and keeps fixed during the dwell time.
Switching interaction topologies.
Switching signal within .
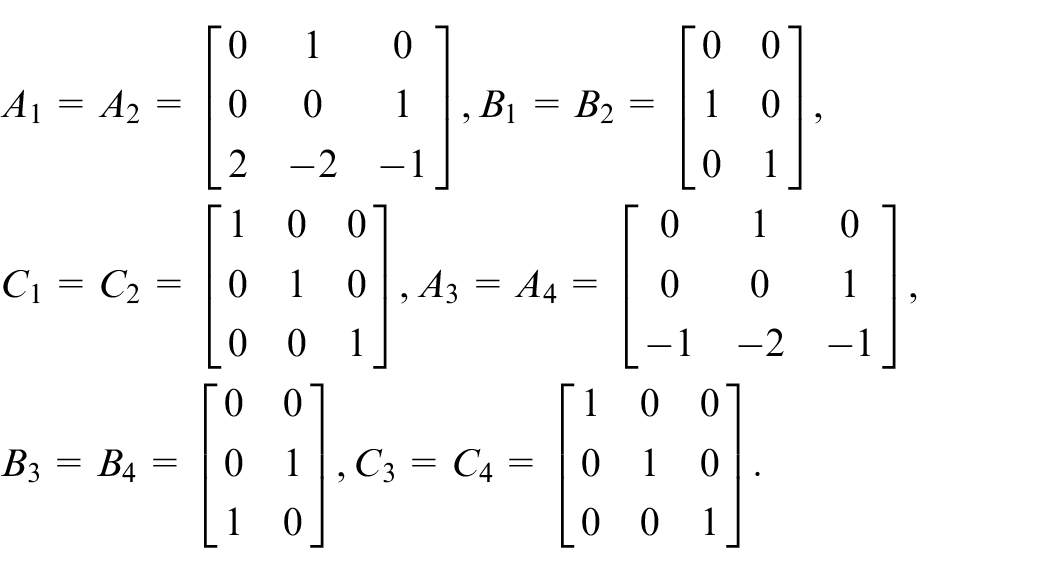
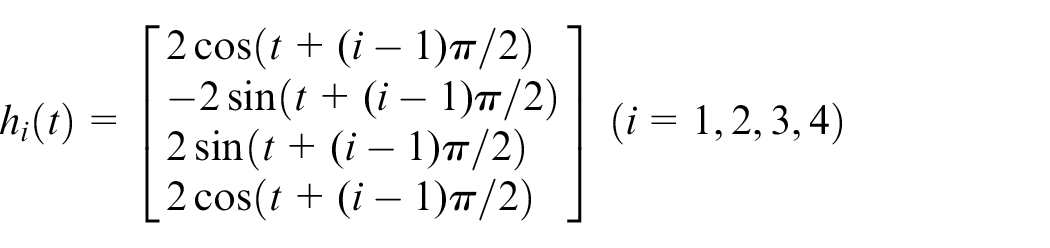
The dynamics of four followers are presented by (1) with:
The dynamic of three leaders are shown as: , .
The formation vector is specified as follow:
If the desired TVOF tracking is finished, the output of the follower can achieve a regular square.
According to Algorithm 1, for each follower, the regulator is given as: , , , .
Let , , . The TVOF tracking feasible condition is proved to be satisfied.
Then, TVOF tracking compensation is given as follow:
Solving the LMI (7), can be given as .
In order to make Hurwitz, , .
Using step 5 in Algorithm 1, , .
Let and denote, respectively, the initial state of the followers and leaders, where is a random number between . The initial states of the observer are zeros.
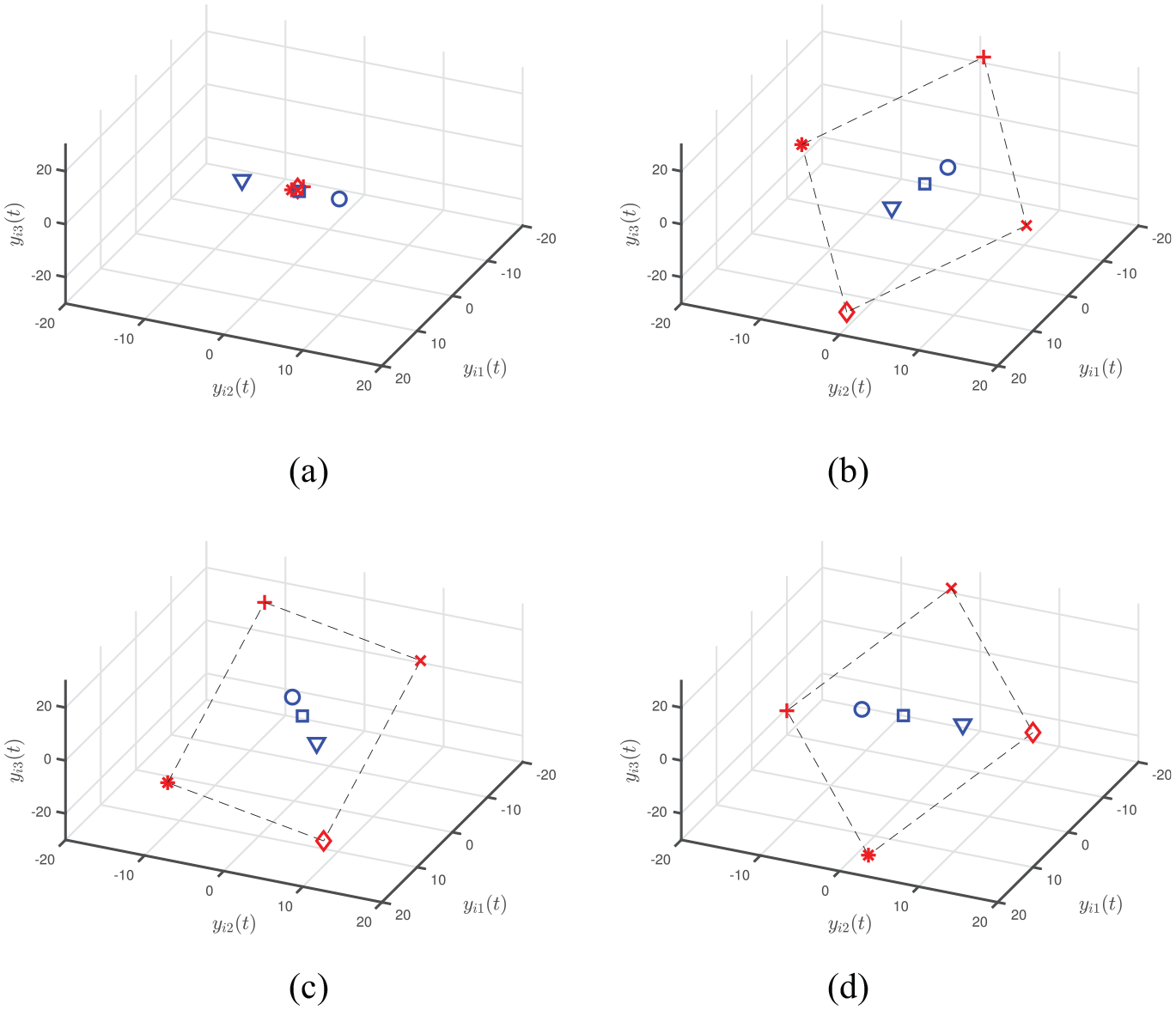
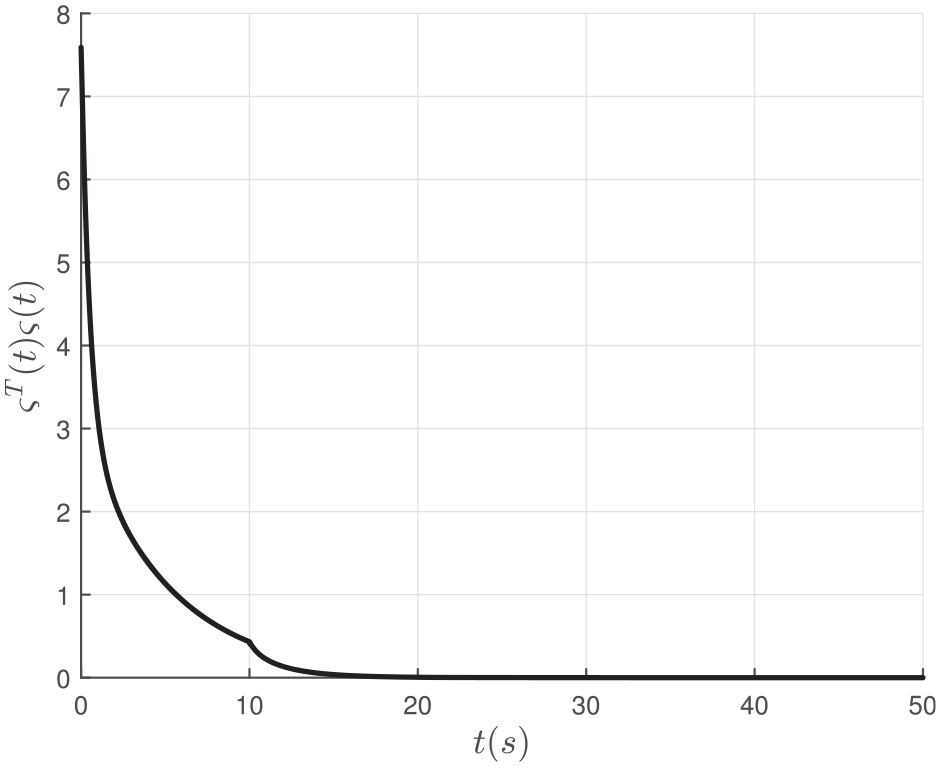
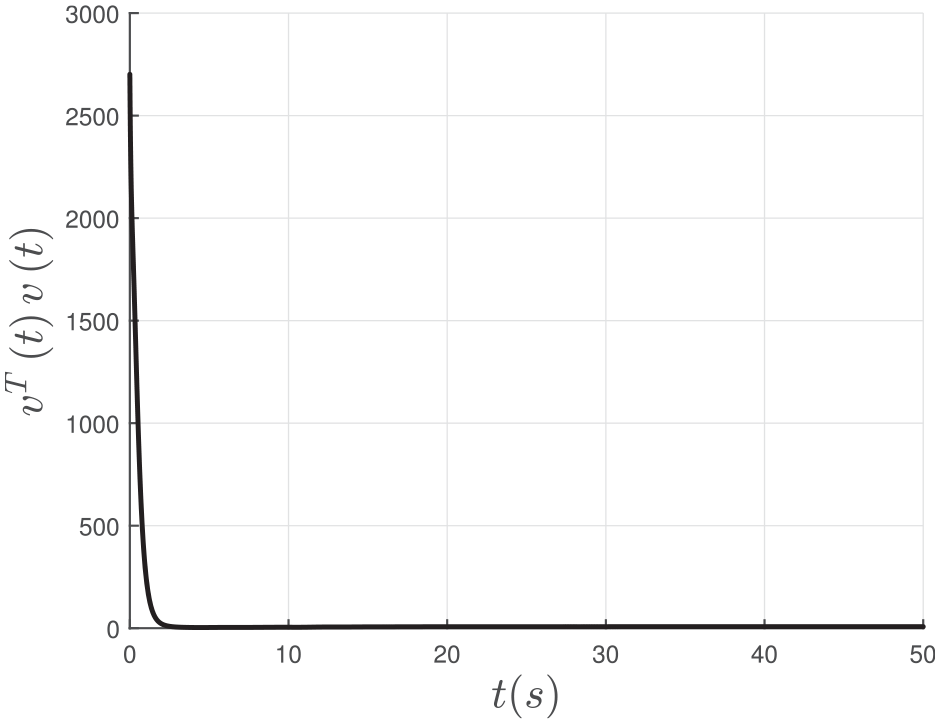
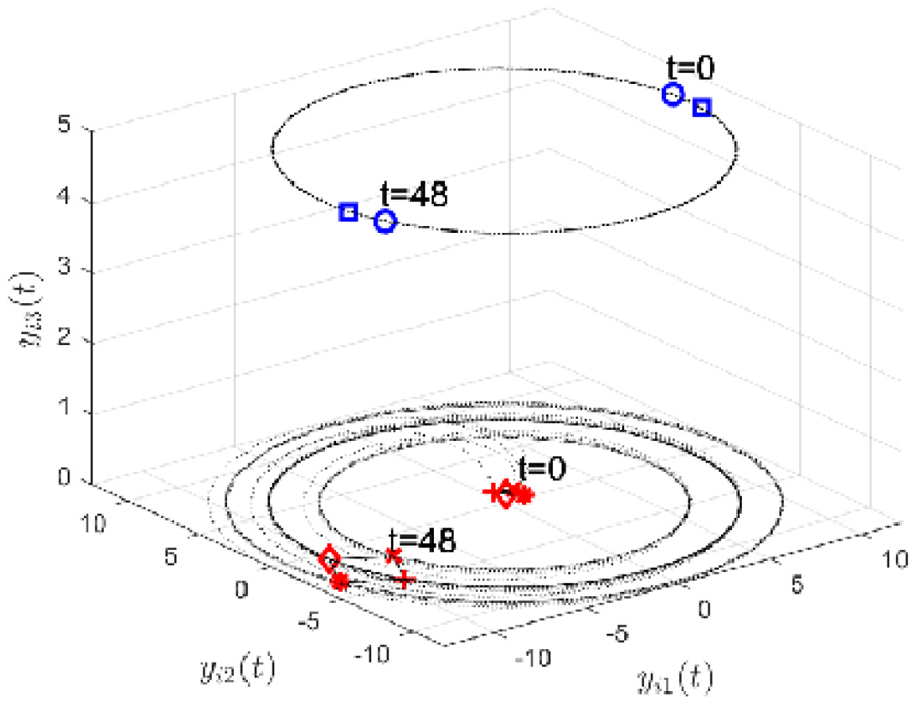
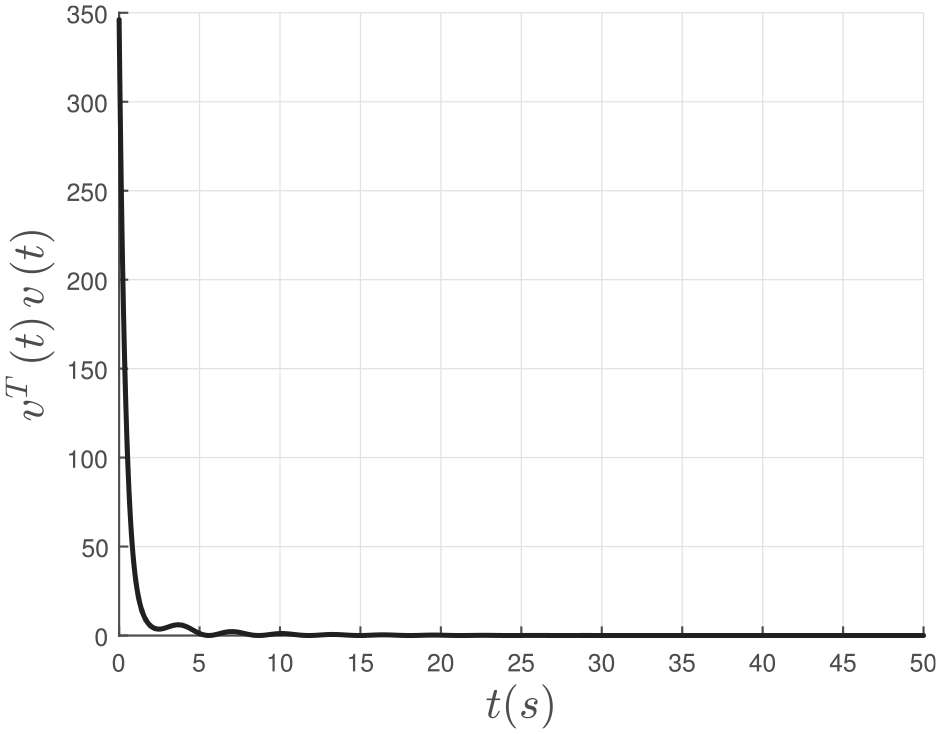
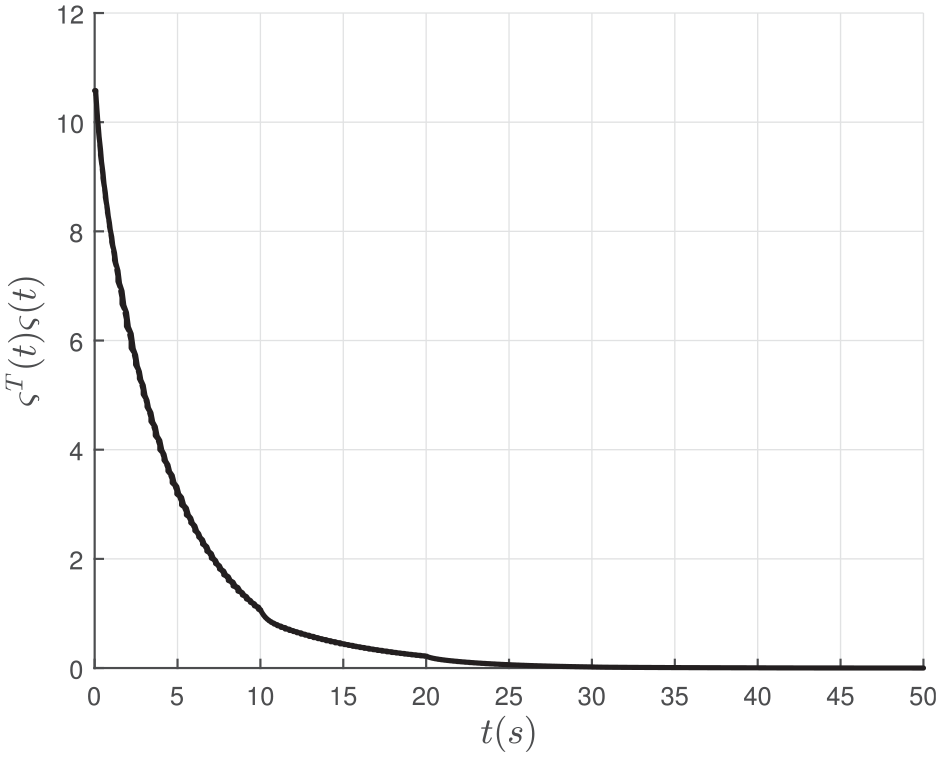
Figure 4 demonstrates the output snapshots at different moments of seven agents, where the outputs of the MASs are represented by different colours, and the convex combination is denoted by imaginary line. Figure 4 indicates that the followers form a quadrangle formation. Figure 5 shows that the observer’s error will converge to zero which means all the followers can obtain the same combination of multiple leaders. As shown in Figure 6, formation-tracking error is convergent within . Therefore, TVOF tracking control for HL-MASs with communication delays and switching topologies is realized.
Example 2. Consider a HL-MAS with four UGVs and two UAVs . In the coordinated searching and rescuing mission, UAVs which used to has a large field of vision can be regarded as leaders and UGVs with much more flexibility can be thought as the followers. The varying communication delay is the same as Example 1. The switching topologies are shown in Figure 7 and the dwelling time .
Snapshots of seven agents at (a) , (b) , (c) , and (d) .
Curves of observer’s error.
Curves of state formation error.
Switching interaction topologies: (a) G1 and (b) G2.
Assumed that all the quadrotor UAVs can fly at a constant height, which means that the formation-tracking control only focuses on the X-Y plane. Then, based on the outer/inner loop framework in Dong et al.,30 the position control loop of UAVs is denoted as follows:
where , , and () respectively represent the position, velocity and control input. The damping constants are denoted as and .
The dynamic of UGVs can be written as
where and () denote the position and control input, respectively.
Let , and . Then, the dynamic of the leaders’ state is presented by and The dynamics of four followers are modelled as , , and ().
The predefined formation vector is denoted by:
It is assumed that leaders are located at a predefined height . And according to Algorithm 1, the regulator is given as , Moreover, it can be concluded that the formation is satisfied with the formation condition and the compensation inputs are denoted by . Then, the control feedback of the state observer is given as The gain matrices are chosen as and The initial state of the followers and the state observers are generated by random number between (0,1). And the initial states of leaders are given as and .
Figure 8 denotes the states of the multi-robot systems within , where UGVs and UAVs are denoted by different colours. It can be seen that the multi-robot systems are randomly located at initial time and achieve the desired formation-tracking at the end. Figures 9 and 10 show the formation-tracking error and observers’ error within the simulation time. One sees that both error systems are proved to be convergent. Therefore, multi-robot systems are said to realize TVOF with both time-varying delays and switching topologies.
Position trajectories within and snapshots at of the multi-robot systems.
Formation tracking error within .
State observers’ error within .
Conclusion
TVOF tracking problem for HL-MASs under the influence of both communication delays and switching topologies was studied. A distributed observer was presented for each follower to obtain the convex combination of multiple leaders’ state with both communication delays and switching topologies. Using Lyapunov theory and LMI technique, the observer’s error was proven to be convergent. Then, an observer-based TVOF tracking protocol was proposed. In order to determine the parameters, an algorithm was also presented for the system to achieve the TVOF tracking with both time-varying delay and switching topologies. Based on this result, target enclosing problems for HL-MASs with one leader has been proved. Future research will concentrate on the output formation-tracking control problem for HL-MASs without well-informed follower.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This work was supported by the Science and Technology Innovation 2030-Key Project of ``New Generation Artificial Intelligence'' under Grant 2020AAA0108200, the National Natural Science Foundation of China under Grants 61873011, 61922008, 61973013 and 61803014, the Defense Industrial Technology Development Program under Grant JCKY2019601C106, the Innovation Zone Project under Grant 18-163-00-TS-001-001-34, the Foundation Strengthening Program Technology Field Fund under Grant 2019-JCJQ-JJ-243, and the Fund from Key Laboratory of Dependable Service Computing in Cyber Physical Society under Grant CPSDSC202001.
ORCID iD
Shiyu Zhou
References
1.
BeardRWLawtonJHadaeghFY. A coordination architecture for spacecraft formation control. IEEE Trans Control Netw Syst2001; 9: 777–790.
2.
YangXXiJWuJ, et al. Consensus transformation for multi-agent systems with topology variances and time-varying delays. Neurocomputing2013; 168: 2560–2580.
3.
SakthivelRSakthivelRKaviarasanB, et al. Finite-time leaderless consensus of uncertain multi-agent systems against time-varying actuator faults. Neurocomputing2019; 325: 159–171.
4.
DongXHuaYZhouY, et al. Theory and experiment on formation-containment control of multiple multirotor unmanned aerial vehicle systems, IEEE Trans Autom Sci Eng2018; 16: 229–240.
5.
StipanovićDMInalhanGTeoR, et al. Decentralized overlapping control of a formation of unmanned aerial vehicles. Automatica2004; 40: 1285–1296.
6.
YuJDongXLiQ, et al. Cooperative guidance strategy for multiple hypersonic gliding vehicles system. Chin J Aeronaut2020; 33: 990–1005.
7.
ChengYJiaRDuH, et al. Robust finite-time consensus formation control for multiple nonholonomic wheeled mobile robots via output feedback. Int J Robust Nonlinear Control2018; 28: 2082–2096.
8.
LiangXLiuYHWangH, et al. Leader-following formation tracking control of mobile robots without direct position measurements. IEEE Trans Automat Control2016; 61: 4131–4137.
9.
WangHWangDPengZ. Neural network based adaptive dynamic surface control for cooperative path following of marine surface vehicles via state and output feedback. Neurocomputing2014; 133: 170–178.
10.
PengZYangSWenG, et al. Adaptive distributed formation control for multiple nonholonomic wheeled mobile robots. Neurocomputing2016; 173: 1485–1494.
11.
Olfati-SaberRMurrayRM. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans Automat Control2004; 49: 1520–1533.
12.
RenWAtkinsE. Distributed multi-vehicle coordinated control via local information exchange. Int J Robust Nonlinear Control2007; 17: 1002–1033.
13.
DongXLiQRenZ, et al. Formation-containment control for high-order linear time-invariant multi-agent systems with time delays. J Franklin Inst2015; 352: 3564–3584.
14.
LiXDongXLiQ, et al. Event-triggered time-varying formation control for general linear multi-agent systems. J Franklin Inst2019; 356: 10179–10195.
15.
DongXZhouYRenZ, et al. Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying. IEEE Trans Ind Electron2016; 64: 5014–5024.
16.
LinZWangLHanZ, et al. Distributed formation control of multi-agent systems using complex Laplacian. IEEE Trans Automat Control2014; 59: 1765–1777.
17.
ChangKXiaYHuangK. Coordinated formation control design with obstacle avoidance in three-dimensional space. J Franklin Inst2015; 352: 5779–5795.
18.
OhKKParkMCAhnHS. A survey of multi-agent formation control. Automatica2015; 53: 424–440.
19.
WangLXiJHeM, et al. Robust time-varying formation design for multiagent systems with disturbances: extended-state-observer method. Int J Robust Nonlinear Control2020; 30: 2796–2808.
20.
WangRDongXLiQ, et al. Distributed adaptive time-varying formation for multi-agent systems with general high-order linear time-invariant dynamics. J Franklin Inst2016; 353: 2290–2304.
21.
DongXXiJLuG, et al. Formation control for high-order linear time-invariant multiagent systems with time delays. IEEE Trans Control Netw Syst2014; 1: 232–240.
22.
RenWBeardRW. Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Trans Automat Control2005; 50: 655–661.
23.
LiJLiJ. Adaptive iterative learning control for coordination of second-order multi-agent systems. Int J Robust Nonlinear Control2014; 24: 3282–3299.
24.
LiWChenZLiuZ. Leader-following formation control for second-order multiagent systems with time-varying delay and nonlinear dynamics. Nonlinear Dyn2013; 72: 803–812.
25.
RenWAtkinsE. Second-order consensus protocols in multiple vehicle systems with local interactions. In: AIAA guidance, navigation, and control conference and exhibit, San Francisco, California, 15–18 August 2005, pp.3689–3701. AIAA.
26.
WangH. Second-order consensus of networked thrust-propelled vehicles on directed graphs. IEEE Trans Automat Control2015; 61: 222–227.
27.
YangHZhangZZhangS. Consensus of second-order multi-agent systems with exogenous disturbances. Int J Robust Nonlinear Control2011; 21: 945–956.
28.
XiaoWYuJWangR, et al. Time-varying formation control for time-delayed multi-agent systems with general linear dynamics and switching topologies. Unmanned Syst2019; 7: 3–13.
29.
DongXHuG. Time-varying formation tracking for linear multiagent systems with multiple leaders. IEEE Trans Automat Control2017; 62: 3658–3664.
30.
DongXZhouYRenZ, et al. Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying. IEEE Trans Ind Electron2017; 64: 5014–5024.
31.
LiTLiZShenS, et al. Extended adaptive event-triggered formation tracking control of a class of multi-agent systems with time-varying delay. Neurocomputing2018; 316: 386–398.
32.
PorfiriMRobersonDGStilwellDJ. Tracking and formation control of multiple autonomous agents: a two-level consensus approach. Automatica2007; 43: 1318–1328.
33.
WangR. Adaptive output-feedback time-varying formation tracking control for multi-agent systems with switching directed networks. J Franklin Inst2020; 357: 551–568.
34.
ChuHGaoLZhangW. Distributed adaptive containment control of heterogeneous linear multi-agent systems: an output regulation approach. IET Control Theory Appl2016; 10: 95–102.
35.
DingZ. Consensus output regulation of a class of heterogeneous nonlinear systems. IEEE Trans Automat Control2013; 58: 2648–2653.
36.
HaghshenasHBadamchizadehMABaradaranniaM. Containment control of heterogeneous linear multi-agent systems. Automatica2015; 54: 210–216.
37.
HuWLiuL. Cooperative output regulation of heterogeneous linear multi-agent systems by event-triggered control. IEEE Trans Cybern2016; 47: 105–116.
38.
HuangCYeX. Cooperative output regulation of heterogeneous multi-agent systems: an criterion. IEEE Trans Automat Control2013; 59: 267–273.
39.
LiZChenMZDingZ. Distributed adaptive controllers for cooperative output regulation of heterogeneous agents over directed graphs. Automatica2016; 68: 179–183.
40.
SuYHuangJ. Cooperative output regulation with application to multi-agent consensus under switching network. IEEE Trans Syst Man Cybern Syst2012; 42: 864–875.
41.
WangYWLiuXKXiaoJW, et al. Output formation-containment of coupled heterogeneous linear systems under intermittent communication. J Franklin Inst2017; 354: 392–414.
42.
HuaYDongXWangJ, et al. Time-varying output formation tracking of heterogeneous linear multi-agent systems with multiple leaders and switching topologies. J Franklin Inst2019; 356: 539–560.
43.
GuoYZhouJLiG, et al. Robust formation tracking and collision avoidance for uncertain nonlinear multi-agent systems subjected to heterogeneous communication delays. Neurocomputing2020; 395: 107–116.
44.
JiangZGuiWXieY, et al. Delay-dependent stabilization of singular linear continuous-time systems with time-varying state and input delays. In: 2007 IEEE international conference on control and automation, Guangzhou, China, 30 May–1 June 2007, pp.1862–1867. New York: IEEE.
45.
SuYHuangJ. Cooperative output regulation of linear multi-agent systems. IEEE Trans Autom Control2012; 57(4): 1062–1066.
46.
LiZChenMDingZ, Distributed adaptive controllers for cooperative output regulation of heterogeneous agents over directed graphs. Automatica2016; 68: 179–183.
47.
HuangJ. Nonlinear output regulation: theory and applications. Philadelphia, PA: SIAM, 2004.