
Abstract
In order to effectively suppress horizontal vibration of the ultra-high-speed elevator car system. Firstly, considering the nonlinearity of guide shoe, parameter uncertainties, and uncertain external disturbances of the elevator car system, a more practical active control model for horizontal vibration of the 4-DOF ultra-high-speed elevator car system is constructed and the rationality of the established model is verified by real elevator experiment. Secondly, a predictive sliding mode controller based on adaptive fuzzy (PSMC-AF) is proposed to reduce the horizontal vibration of the car system, the predictive sliding mode control law is achieved by optimizing the predictive sliding mode performance index. Simultaneously, in order to decrease the influence of uncertainty of the car system, a fuzzy logic system (FLS) is designed to approximate the compound uncertain disturbance term (CUDT) on-line. Furthermore, the continuous smooth hyperbolic tangent function (HTF) is introduced into the sliding mode switching term to compensate the fuzzy approximation error. The adaptive laws are designed to estimate the error gain and slope parameter, so as to increase the robustness of the system. Finally, numerical simulations are conducted on some representative guide rail excitations and the results are compared to the existing solution and passive system. The analysis has confirmed the effectiveness and robustness of the proposed control method.
Keywords
Introduction
With the increase of high-rise buildings, the popularization of ultra-high-speed elevators has become an inevitable trend. However, the high speed of elevators makes the horizontal vibration of the car system more severe. Intense vibration will not only seriously affect the comfort of passengers, but also affect the normal operation of the instruments on the elevator car, and even lead to safety accidents. Therefore, elevator horizontal vibration suppression has become one of the key problems to be solved urgently in the field of ultra-high-speed elevator.1,2 At present, control methods for elevator horizontal vibration reduction include passive vibration reduction 3 and active control.4,5 Guide shoe spring and rubber block are often used to isolate the car system in passive vibration reduction. The damping force provided by this method is small, which is difficult to meet riding comfort requirements of ultra-high-speed elevator. Therefore, active control method has become the main way to solve the horizontal vibration of the ultra-high-speed elevator.
It is necessary to establish a reasonable dynamic model for the active control research on horizontal vibration of the car system. Currently, the guide shoe model is simplified as a linear system, and the active control model is built based on the constant mass and only considering the displacement excitation of the guide rail in the studies of the car system horizontal vibration control.6–8 Nevertheless, the guide shoe has nonlinear characteristics due to the use of rubber material of the shoe lining in the rolling guide shoe. In addition, the change of passenger load and the different specifications of parts on the car frame will cause uncertainty in the mass and moment of inertia of the car and the car frame. Meanwhile, due to the influence of factors such as shaft air flow, wire rope swing and so on, 9 there are other uncertain external disturbances in the car system. Therefore, in order to simulate a more accurate and reliable situation, it is necessary to consider the influence of the nonlinearity of guide shoe and the above-mentioned compound uncertainty on the performance of the elevator system. Sharma and Grover 10 studied the nonlinear characteristics of rolling guide shoe, described it by Bouc-Wen hysteretic model, and determined the undetermined coefficients in the model through parameter identification. Mei et al. 11 used Hertz contact theory to establish a three-dimensional rolling contact model of the elevator guidance system for the nonlinear problem of rolling guide shoe lining. Feng et al. 12 considered the uncertainty of the external load and designed a position controller and attitude controller to reduce the horizontal vibration of the elevator car system. When the above scholars constructed the horizontal vibration model of elevator car system, they only considered the nonlinearity of guide shoe or the uncertainty of the car system. The influence of the both nonlinearity of guide shoe and uncertainty of the car system on the active control performance of elevator car system was neglected.
The traditional control method is not effective in dealing with the nonlinear and compound uncertain disturbance problems in the car system. Sliding mode control (SMC) is appropriate for various uncertain nonlinear systems.13–15 Its main advantage is that the sensitivity to system uncertainties and disturbances is low, and it has been applied in elevator related fields.16,17 However, due to the inherent discontinuous switching characteristics of SMC when dealing with uncertain problems, the system will produce serious chattering phenomenon, which will affect the control effect of the system. To overcome the chattering of SMC, various methods have been proposed in the literature, one method is to apply a saturation function to the SMC control gain when the sliding surface is located in the boundary of the sliding hyper-plane. For example, Park and Tsuji 18 and Zhou et al. 19 designed a predictive sliding mode controller based on switching term (PSMC-ST), and introduced the sliding surface into the quadratic performance index of nonlinear predictive control, thus reducing the chattering of SMC. This method is simple, but it can’t guarantee the output convergence. Another common method is to use a disturbance observer to estimate and compensate the external disturbance and uncertainty, so as to solve the chattering of SMC.20,21 However, it has high accuracy only for constant or slow changing disturbances. Another way to solve the chattering of SMC is to apply fuzzy logic system (FLS). Due to the universal approximation characteristic, FLS can effectively realize the adaptive approximation of complex uncertain systems and does not depend on the system model. At present, it has been widely used in various uncertain systems,22,23 which provides a new method to solve the compound uncertainty of the car system.
Based on the above analysis, aiming at the problem of the horizontal vibration of the car system and the chattering of SMC, a predictive sliding mode controller based on adaptive fuzzy (PSMC-AF) is designed in this paper, and simulation experiments are used to analyze and verify the horizontal vibration control effect of the PSMC-AF for ultra-high-speed elevator car system. This article mainly contributes are presented as follows:
Considering the nonlinearity of guide shoe, parameter uncertainties and uncertain external disturbances of the elevator car system, a more realistic horizontal vibration active control model of the 4-DOF ultra-high-speed elevator car system is constructed.
A PSMC-AF is designed to reduce the horizontal vibration of the car system. In order to reduce the influence of compound uncertainty of the car system, a FLS is established to approximate the compound uncertain disturbance term (CUDT) on-line.
The continuous smooth hyperbolic tangent function (HTF) is used to introduce sliding mode switching term to compensate the fuzzy approximation error. Furthermore, the adaptive laws are designed to estimate the error gain and slope parameter for improving the performance of the controller.
The rest of the article is organized as follows. In section “An active control model of the 4-DOF elevator car system,” the active control model for horizontal vibration of the car system is constructed. In section “Design of predictive sliding mode controller based on adaptive fuzzy,” the PSMC-AF is designed and the stability of the controller is proved. In section “Simulink study,” the effectiveness of the controller is verified by the simulation. Finally, conclusions are drawn in section “Conclusion.”
An active control model of the 4-DOF elevator car system
Nonlinear dynamic model of car system with active control
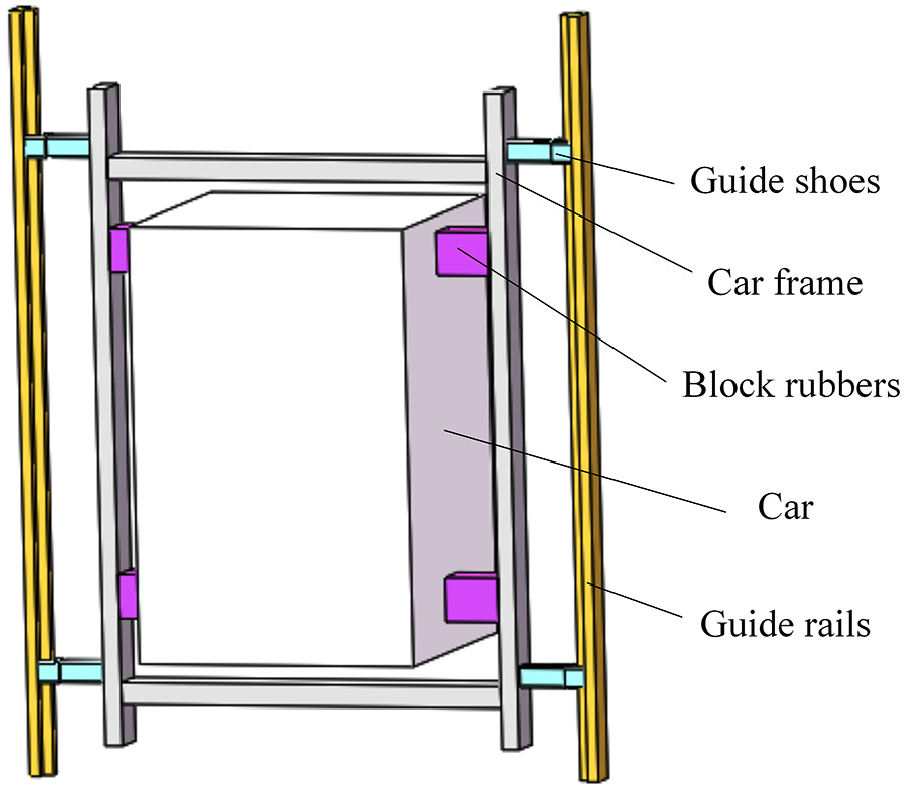
The elevator car system mainly includes car and car frame, which is connected by rubber block. Guide shoes are installed on the upper and lower sides of the car frame and form the guiding system of the car with the guide rails, shown in Figure 1. In order to simplify the complexity of its dynamic analysis and controller design, the following assumptions are made:
Because the elastic connection between the car and the car frame, the rubber block is regarded as a spring-damping system with the same structure and parameters.
Because the guide wheel is close to the surface of the guide rail, the mass of the guide wheel is ignored. The guide shoe is simplified as a nonlinear spring-damping system with the same structure and parameters.
Since the car frame is not a regular cube, the deviation of the center of mass between the car and the car frame is considered.
Structural diagram of elevator car system.
Based on the above basic assumptions, the nonlinear dynamic model of car system with active control is established as shown in Figure 2 (right is the positive direction of force). The parameters and their physical significance in the model are shown in Table 1.
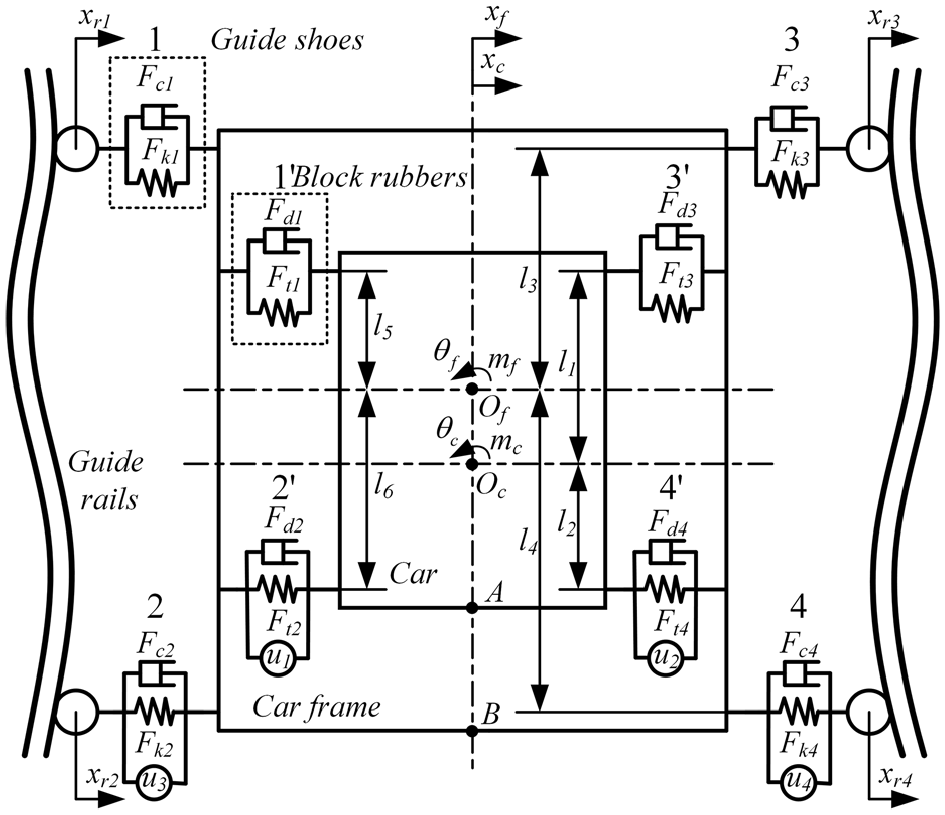
Nonlinear dynamic model of the elevator car system with active control.
The parameters and physical significance of the elevator car system.

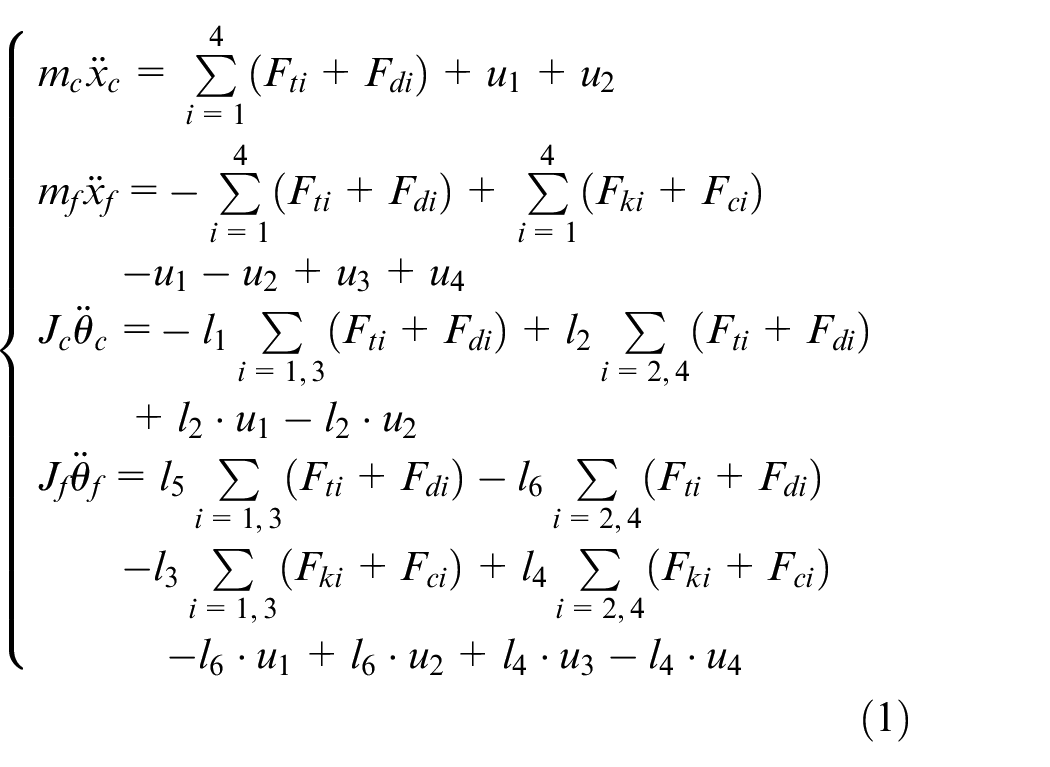
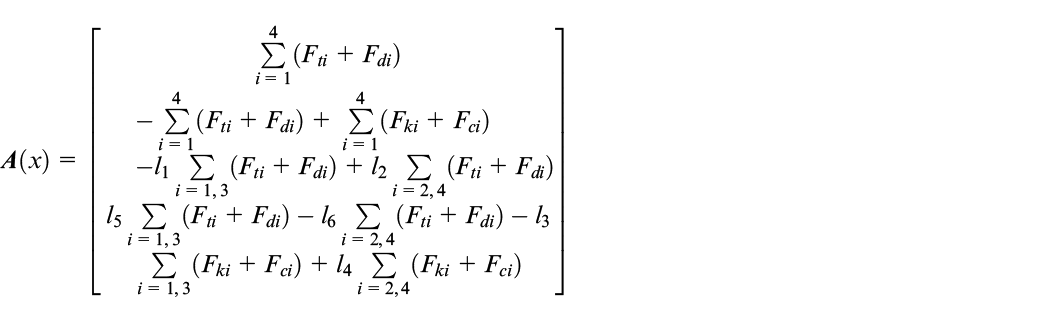
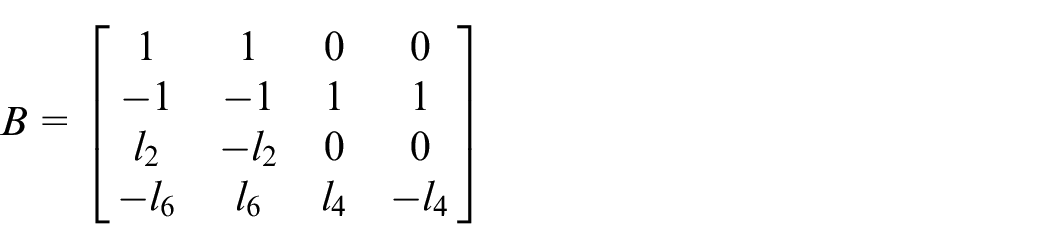
According to Newton’s second law, the dynamic equation for the ultra-high-speed elevator car system dynamic model shown in Figure 2 can be modeled as
Considering the nonlinearity of the guide shoe spring-damping system, the nonlinear spring force

where

Besides, the spring force

in which
State equation of elevator car system considering nonlinearity and uncertainty
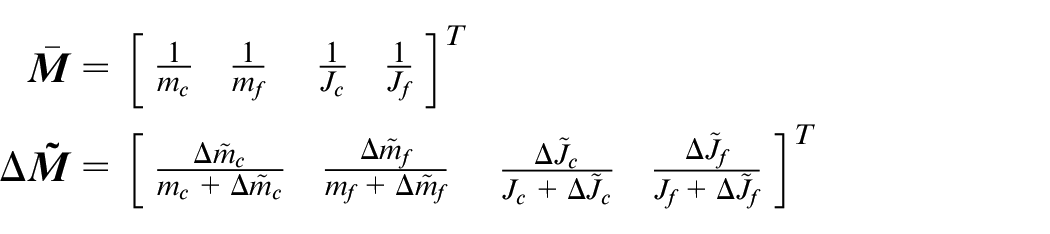
In the ultra-high-speed elevator car system, due to the change of the number of passengers and the different specifications of the application parts installed on the car frame, the car mass, the car moment of inertia, the car frame mass and the car frame moment of inertia vary within a certain range, which makes the horizontal vibration of the car system more complicated during operation. The uncertainties of the above four parameters can be described by the nominal value of the parameters themselves and their possible perturbation momentum, which are given by

where
The two main performances of the elevator car system are run stability and ride comfort, that is, the controller can guarantee the closed-loop car system in the presence of nonlinear factors and uncertain interference: the horizontal displacement and acceleration of the car system are as close to zero as possible, that is, the amplitude of
Consequently, the state equation of car system considering the compound uncertainty of the car system can be further expressed as follows
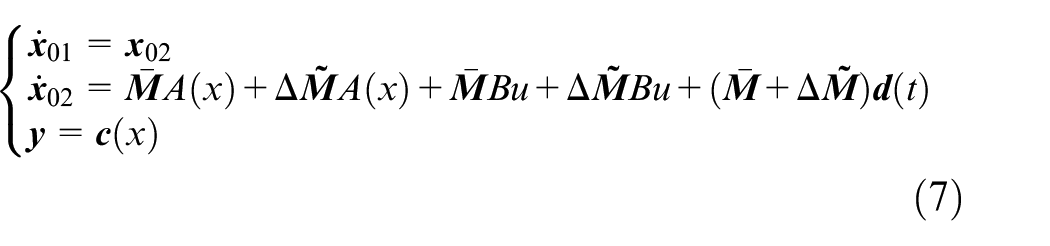
where
Equation (7) can be expressed as

where
Select position A on the car floor and position B on the car frame floor as the observation places, point A and point B are the center of the car and the car frame floor, respectively. Define
Model experiment verification
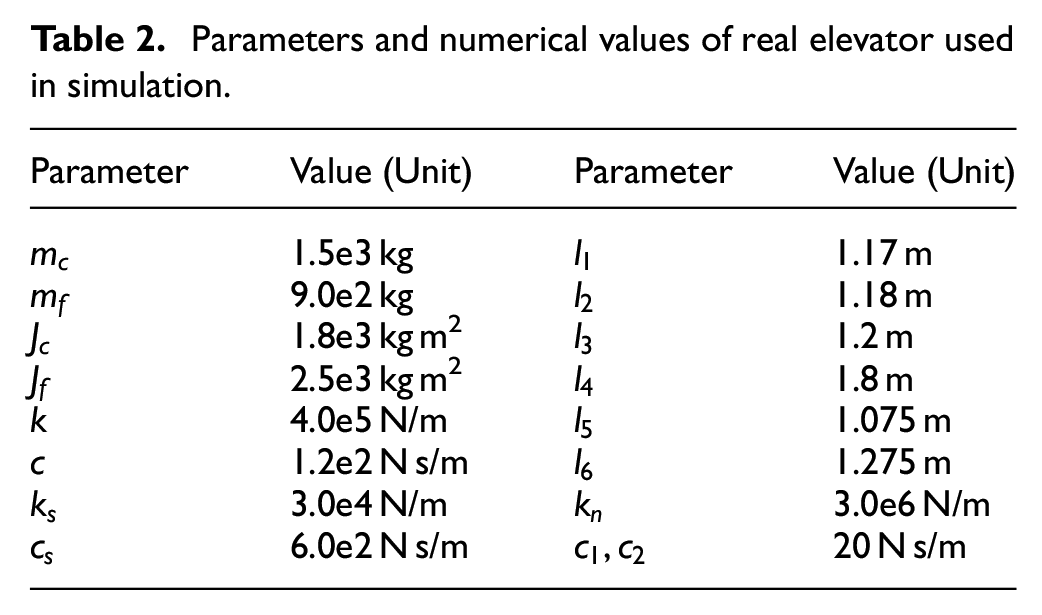
To verify the rationality of the model, the horizontal vibration acceleration of the real elevator was measured in the 7 m/s ultra-high-speed elevator test tower of Shandong Fuji Zhiyu Elevator Co., Ltd. During the experiment, the DT-4A tester was placed at the bottom center of the elevator car, and it run repeatedly to collect a large amount of original acceleration data, as shown in Figure 3. The measured data of the horizontal vibration acceleration in the uniform speed section (about 5 s) of the measured image are read. At the same time, MATLAB is used in this paper to simulate the established elevator model. The specific parameters of the real elevator are shown in Table 2, and the simulation value of the horizontal vibration acceleration of the car body is obtained.
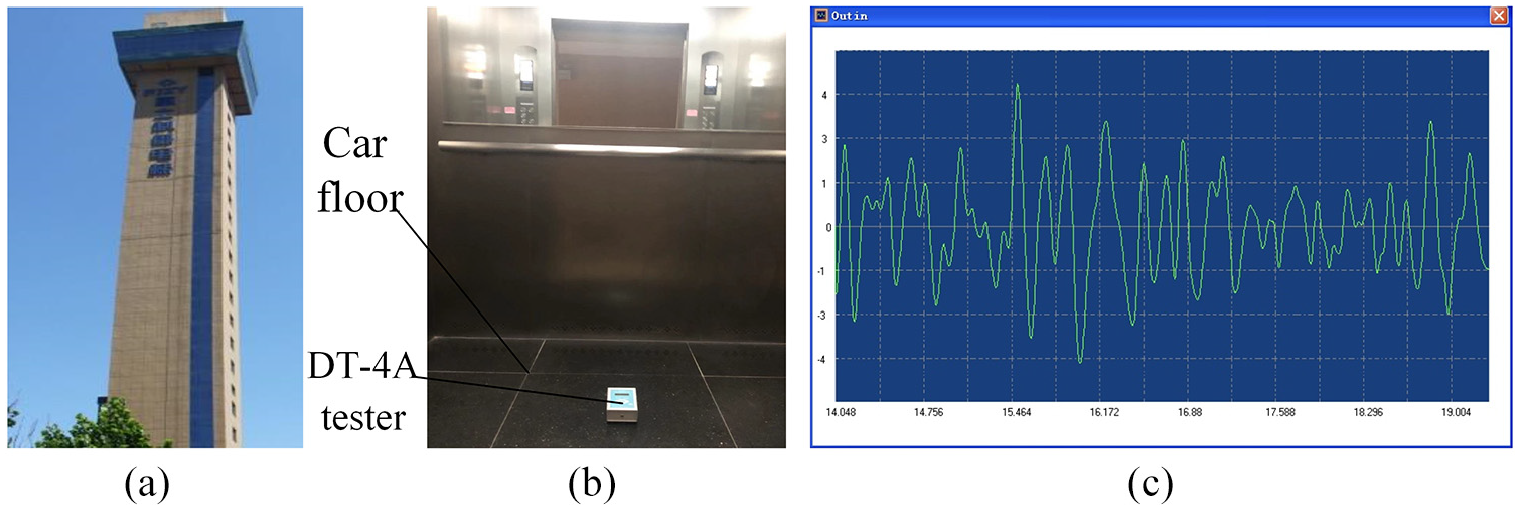
Horizontal vibration experiment of 7 m/s elevator. (a) 120 m elevator experimental tower. (b) Experimental site. (c) Time domain response of measured car horizontal vibration acceleration.
Parameters and numerical values of real elevator used in simulation.
It can be seen from Figure 4 that the trends of the horizontal vibration acceleration of the simulation are generally consistent with the measured response curves. The root-mean-square (RMS) values of the measured and simulated horizontal vibration acceleration of the car are 0.032 m/s2 and 0.034 m/s2, and the maximum (MAX) values are 0.096 m/s2 and 0.092 m/s2 respectively. The relative errors of the RMS and MAX values of the horizontal vibration acceleration compared to the measured values are 6.3% and 4.2%. By comparing and analyzing the results of simulation and real elevator experiment, it is verified that the horizontal vibration model of ultra-high speed elevator established is correct and reasonable.
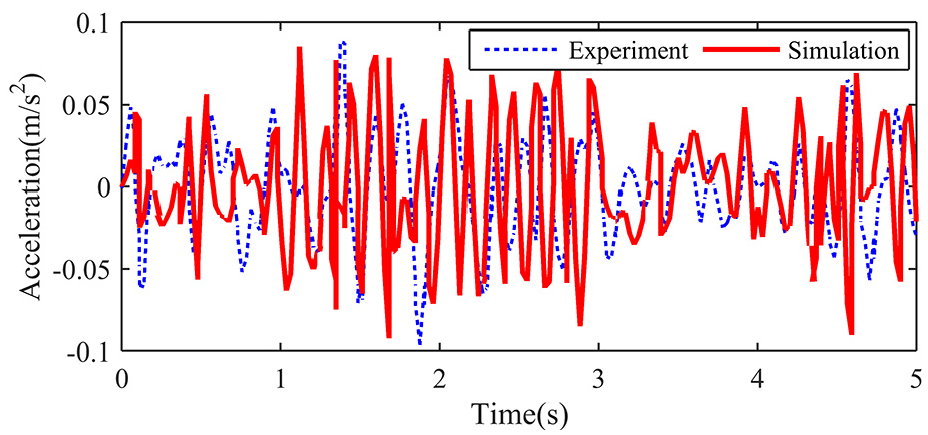
Comparison of the horizontal vibration acceleration for the simulated and measured elevators.
Design of predictive sliding mode controller based on adaptive fuzzy
Design of predictive sliding mode controller
Design of predictive sliding mode controller under nominal condition
For the horizontal vibration of ultra-high-speed elevator, only the nominal car system is considered, that is, the compound uncertainty of the car system is not considered. The equation of the system can be obtained

where
Define the output reference track as

where the parameter matrix

The predicted sliding mode performance index is constructed

where
When the control vector

Design of predictive sliding mode controller considering nonlinearity and uncertainty
Based on the above, considering the uncertainty of mass, moment of inertia and external disturbances of elevator car system, (10) can be written as

where
Based on (12) and (15), we can obtain
And the compound uncertain disturbance term (CUDT) is expressed as

From (13), (15), (16), and (17), a predictive sliding mode control law considering nonlinearity and uncertainty is obtained

Due to the changes of mass, moment of inertia and uncertain external disturbances in the car system cannot be measured, that is,
Design of adaptive fuzzy auxiliary controller
An FLS is established to approximate
In order to solve the horizontal vibration caused by the compound uncertainty of the system, an adaptive fuzzy scheme is added to the conventional predictive sliding mode control. Using the approximation property of FLS,
Based on the product reasoning method and the central average antifuzzy controller, 26 the FLS of CUDT is designed as follows:
where

By lemma 1,

where
In the car system, the perturbation momentum of parameters and uncertain external disturbances are bounded, that is,
where
where
Design of adaptive fuzzy auxiliary controller based on HTF
In order to further improve the performance of the controller and the comfort of the ultra-high-speed elevator, the sliding mode switching term is used to compensate the fuzzy approximation error

where
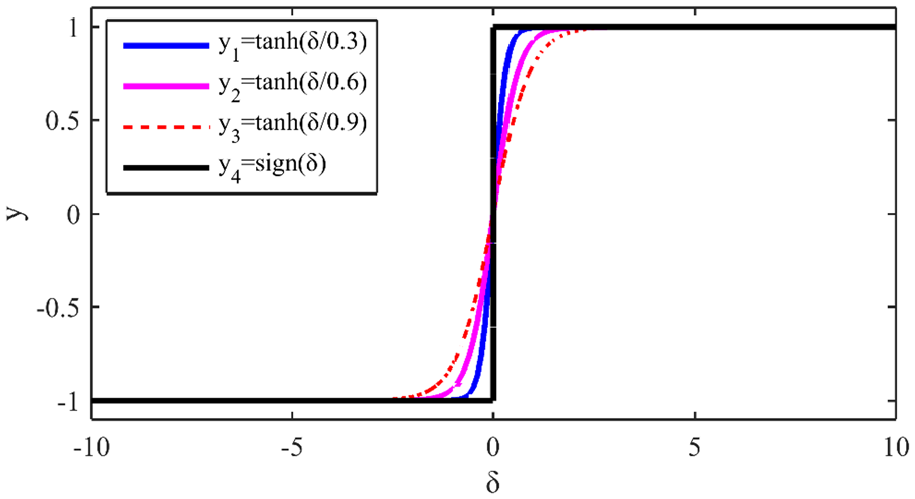
Compared with the sign function, the change rate of the HTF is more gentle as the independent variable approaches saturation. At the same time, an appropriate slope parameter

where
HTF with different slope parameter and sign function.
From (18), (21), and (22), an adaptive fuzzy auxiliary control law based on HTF is designed.

To ensure that the motion of the system can reach the sliding surface, the error gain

where
Set the adaptive laws as


where the constant
According to (14), (18), and (26), the predictive sliding mode control law based on adaptive fuzzy can be expressed as

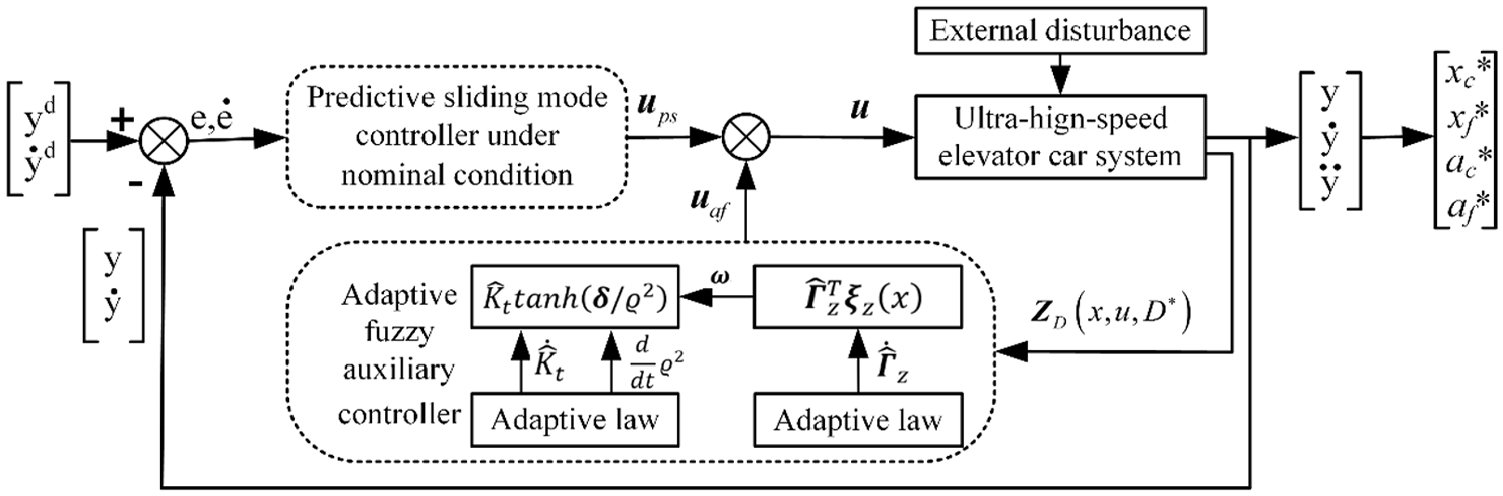
In conclusion, the control flow chart of the designed PSMC-AF is shown in Figure 6.
Control flow chart of the PSMC-AF.
Stability analysis of controller



where
The time derivative of

From (16), (26), and (30), we can be obtained

Considering (27) and (28), we obtain

From (22), (34), (35), and (36), we have
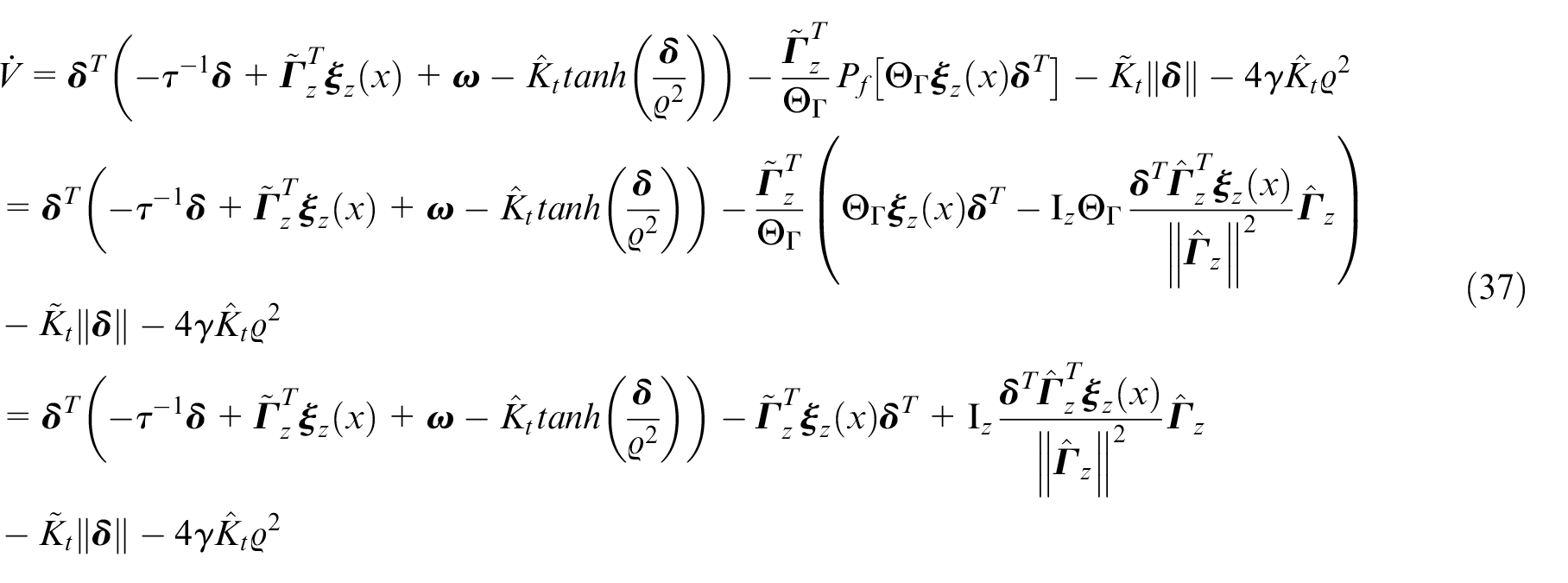
From inequality
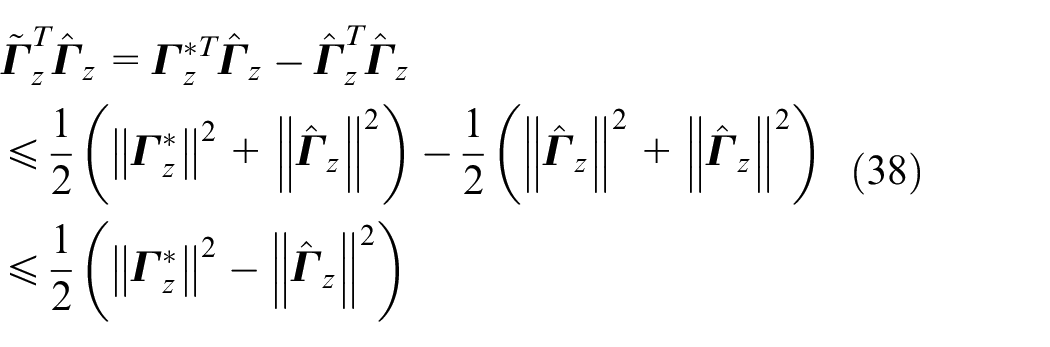
Considering (23) and (38), one can obtained as

From (39), we can be obtained
According to Lemma 2, equation (25) can be written as

It can be deduced from (37) and (41)
By substituting (42) into (40), the final result is

Since
Simulation study
For the sake of demonstrating the validity and superiority of the control method proposed in this paper, simulation analysis is carried on the 7 m/s ultra-high-speed elevator car system. In the simulation, the parameter uncertainties are described as:
Impulse excitation response at guide rail joint
Due to the influence of manufacturing, installation and other factors, impulse excitation will be generated by the guide rail joint, which will cause the horizontal vibration of the car system. The standard section length of the elevator guide is 5 m and the running speed is 7 m/s. Therefore, two pulse signals with amplitude of 5 mm and interval time of 0.71 s are set as the impulse excitation at guide rail joint after 1 s of the simulation. 6
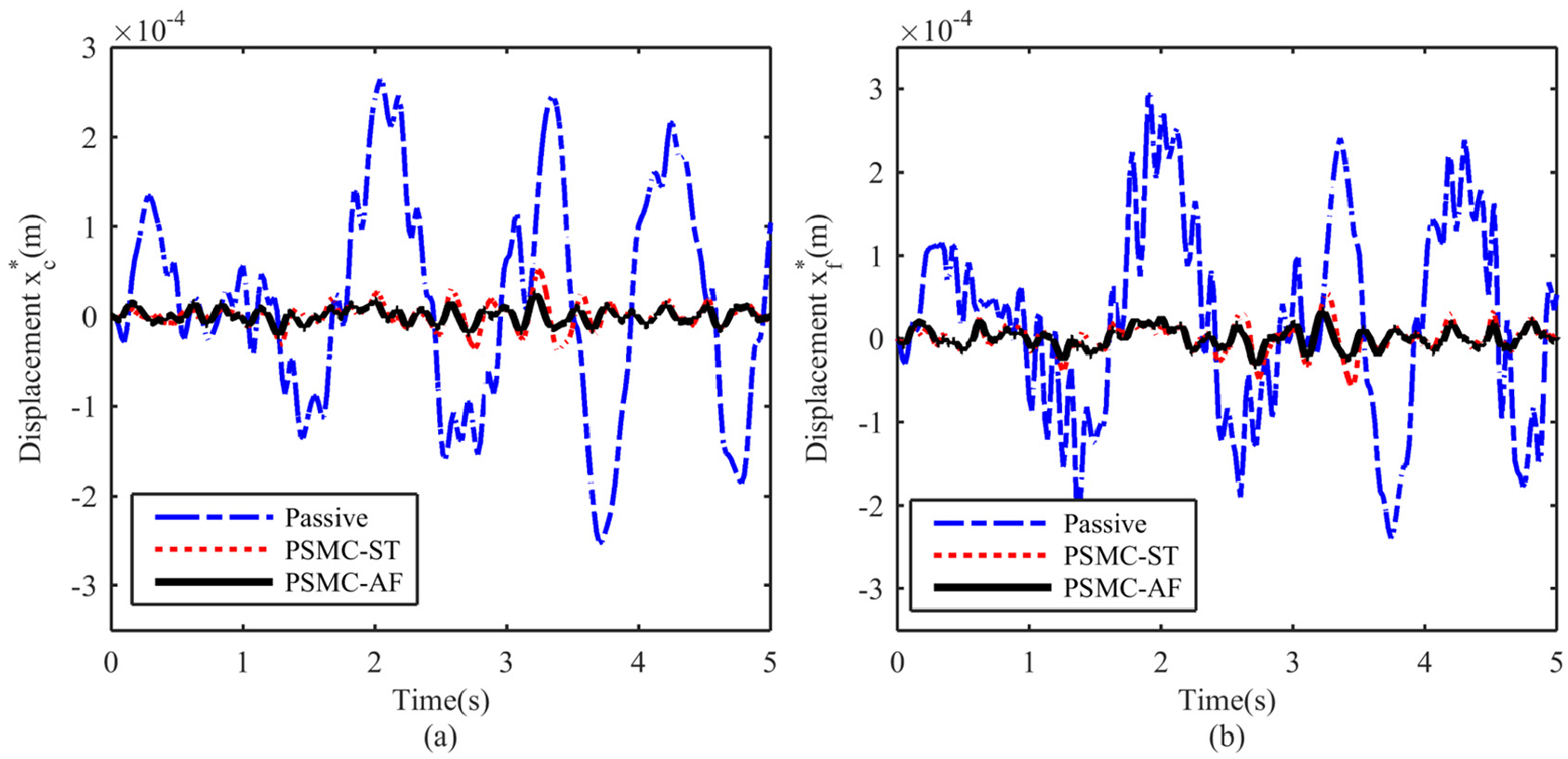
Under the three control conditions, the horizontal vibration displacement and acceleration response curves of the car system excited by the guide rail joint pulse are shown in Figures 7 and 8. It can be seen that the displacement and acceleration of the two controlled active car systems are less than those of the passive car system despite the presence of nonlinear guide shoe and uncertainty of the system. Compared with PSMC-ST, PSMC-AF can make the car system have lower acceleration and displacement peak value, shorter stability time, stronger ability to approach uncertain disturbance, and it is more helpful to improve riding stability and comfort.
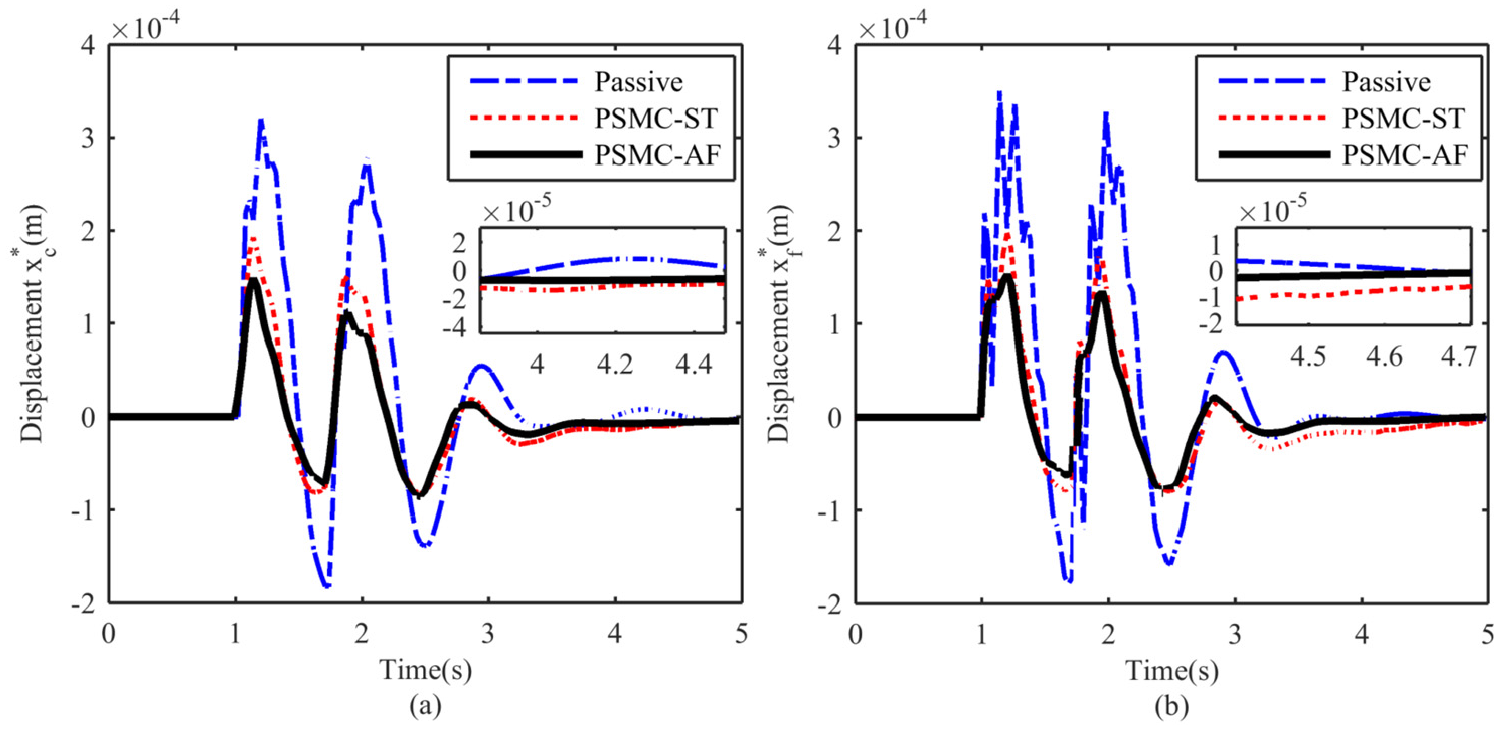
Time response of displacement under impulse excitation. (a) Comparison of car floor vibration displacement. (b) Comparison of car frame floor vibration displacement.
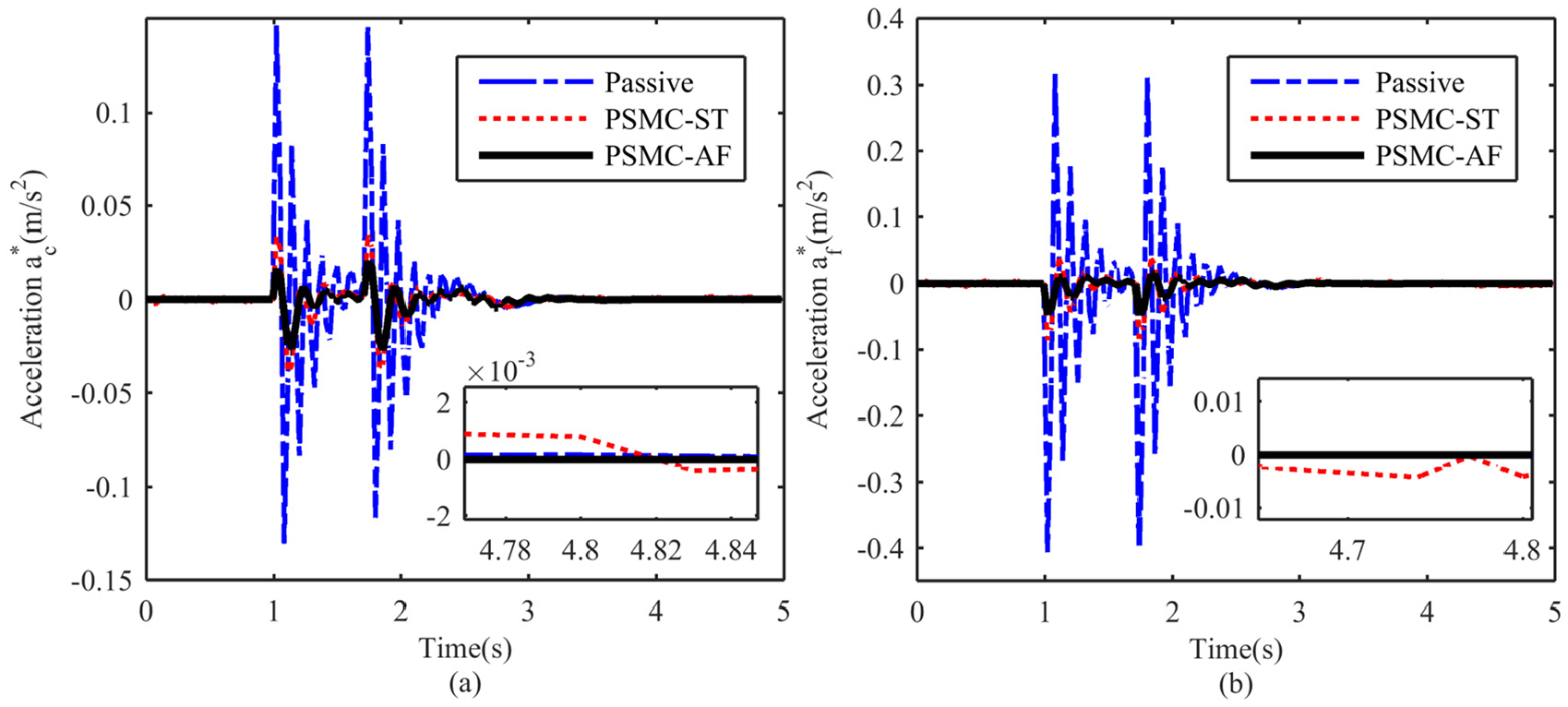
Time response of acceleration under impulse excitation. (a) Comparison of car floor vibration acceleration. (b) Comparison of car frame floor vibration acceleration.
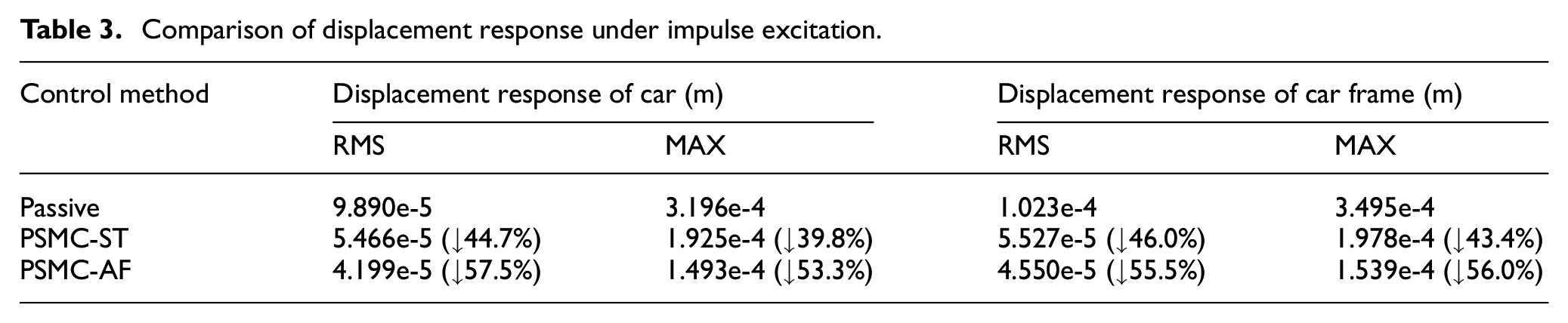
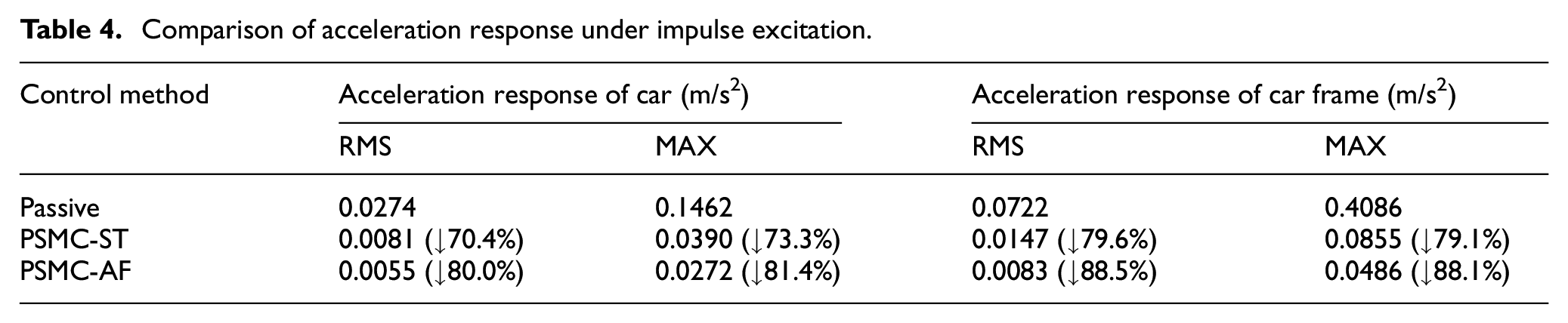
It is widely recognized that the control performance of the system can be quantified by reference to RMS and MAX values. The RMS and MAX values of horizontal vibration displacement and acceleration of the car system are given in Tables 3 and 4, which reflect the percentage of performance improvement achieved by the PSMC-ST and PSMC-AF with respect to the passive control. It is obvious that the run stability (displacement) is significantly improved under the active control cases, because the RMS and MAX values decrease by around 40% when using the PSMC-ST and by more than 53% when using the PSMC-AF. It is clear that ride comfort (acceleration) with the PSMC-ST (∼70%) is inferior to that of with the PSMC-AF (>80%).
Comparison of displacement response under impulse excitation.
Comparison of acceleration response under impulse excitation.
The comparison of the actuator output force is given in Figure 9. It is seen from the figure that the actuator 3 has the problem of output saturation under the control of PSMC-ST, so the optimal control cannot be achieved. Compared with PSMC-ST, under the control of PSMC-AF, the four actuators meet the control force constraint and their output force is smaller, which can play the role of energy saving and reduce energy waste.
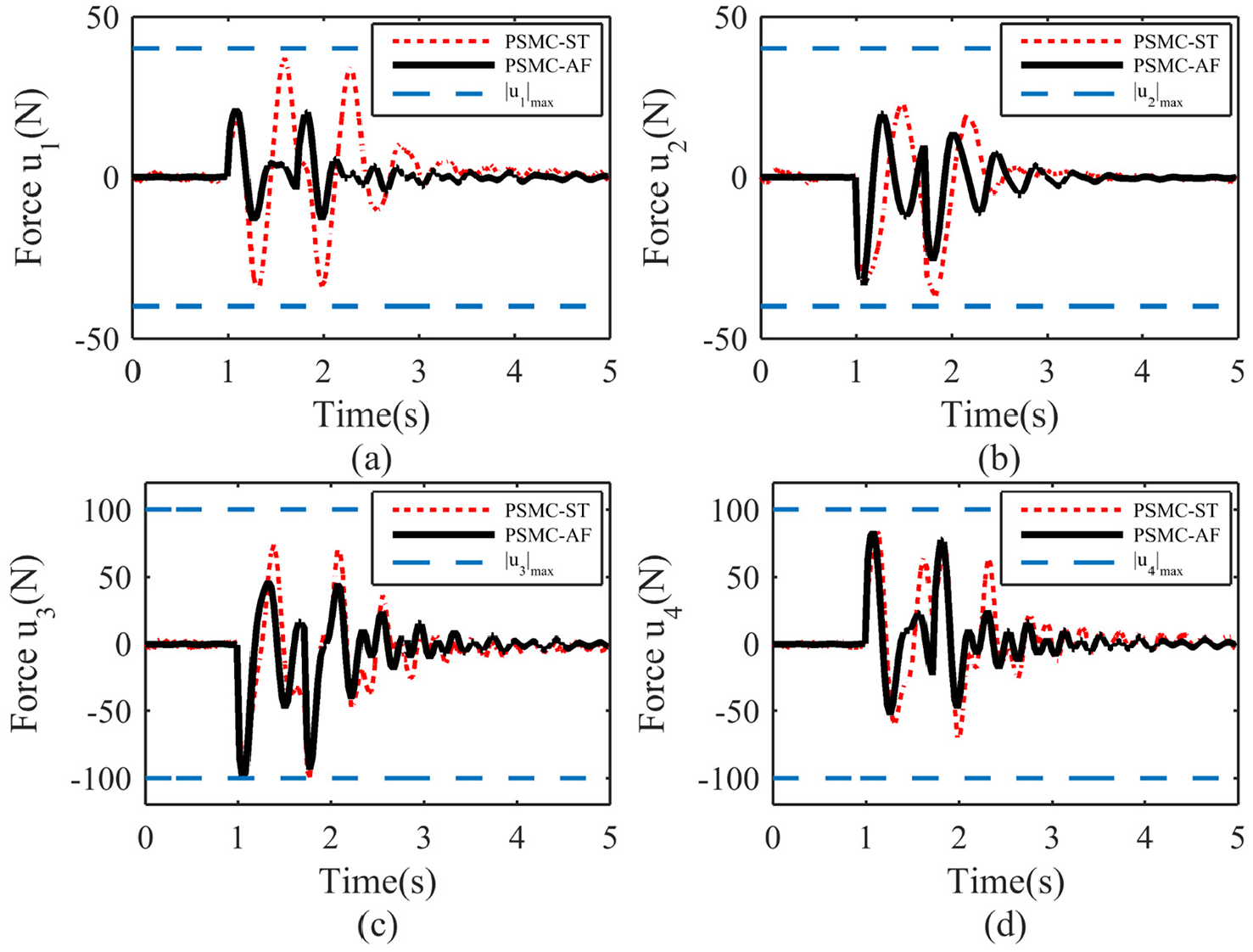
The actuator output force of the car system under pulse excitation. (a) The output force of actuator 1. (b) The output force of actuator 2. (c) The output force of actuator 3. (d) The output force of actuator 4.
Random excitation response at guide rail surface
In order to further evaluate the performance of the proposed controller, considering the irregularity of the guide rail surface caused by the manufacturing. The surface roughness error of the guide rail approximately conforms to a normal distribution. Gauss white noise was used to simulate the random excitation of the guide rail surface, the mean value is
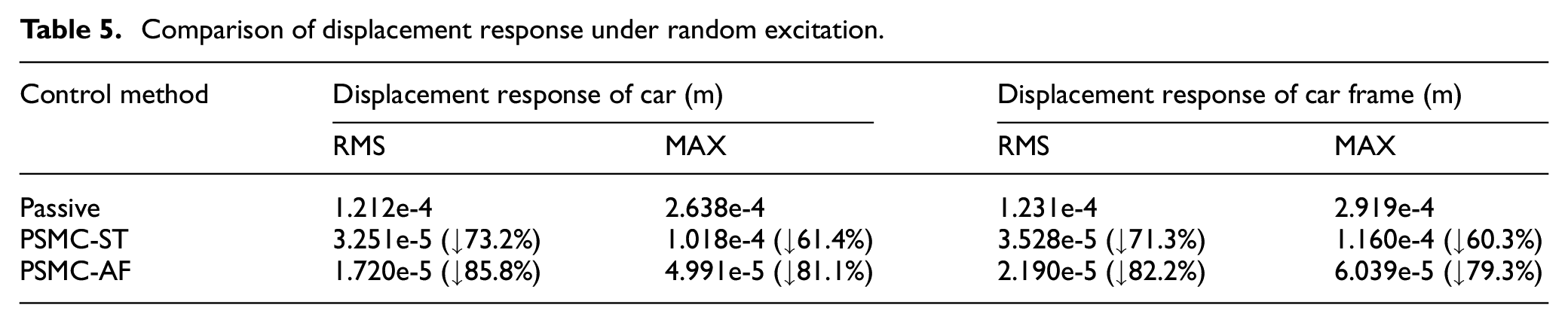
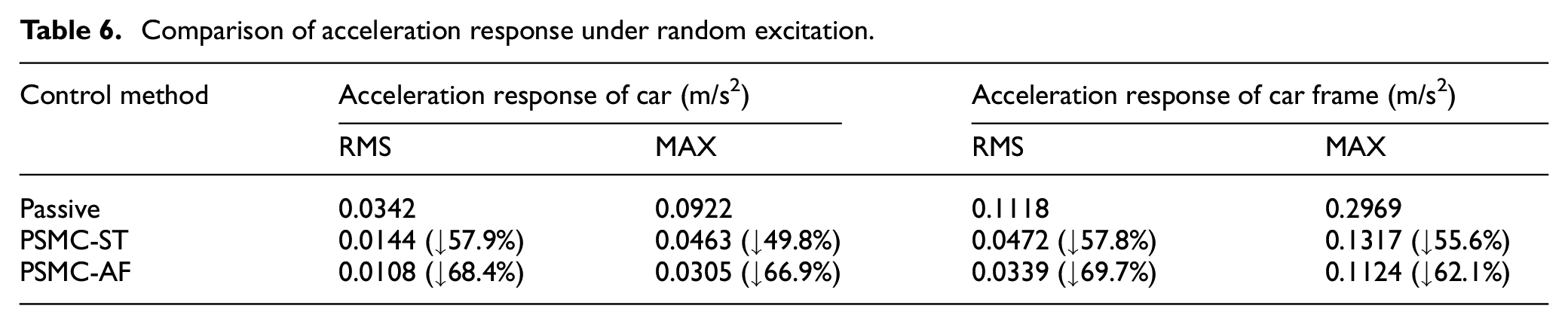
Under the random excitation of the guide rail surface and uncertain external disturbances, Figures 10 and 11 compare the horizontal displacement and acceleration of the three control cases of the car systems over time. After carefully observing the response curves, one can find that the PSMC-ST is robust against the horizontal vibration of the car system better than the passive control; however, its performance is not as good as that of PSMC-AF. This indicates the superiority of the PSMC-AF in spite of the existence of nonlinear guide shoe and uncertainty of the system. The RMS and MAX values are compared in Tables 5 and 6. It is clear that the PSMC-ST and PSMC-AF can achieve satisfactory car system performance, stabilizing the system attitude and improving ride comfort. In addition, for the proposed controller, the RMS and MAX values of the car’s vibration displacement are reduced by 85.8% and 81.1%, and the RMS and MAX values of the vibration displacement of the car frame are decreased by 82.2% and 79.3%, respectively; the RMS and MAX values of the car’s vibration acceleration are reduced by 71.7% and 66.9%, and the RMS and MAX values of the vibration acceleration of the car frame are decreased by 69.7% and 62.1%, respectively. These reductions are greater than those seen for the PSMC-ST. The reason why the PSMC-AF has an advantage over the PSMC-ST is owing to its excellent capability to deal with uncertainty. These results further confirm the effectiveness of PSMC-AF.
Time response of displacement under random excitation. (a) Comparison of car floor vibration displacement. (b) Comparison of car frame floor vibration displacement.
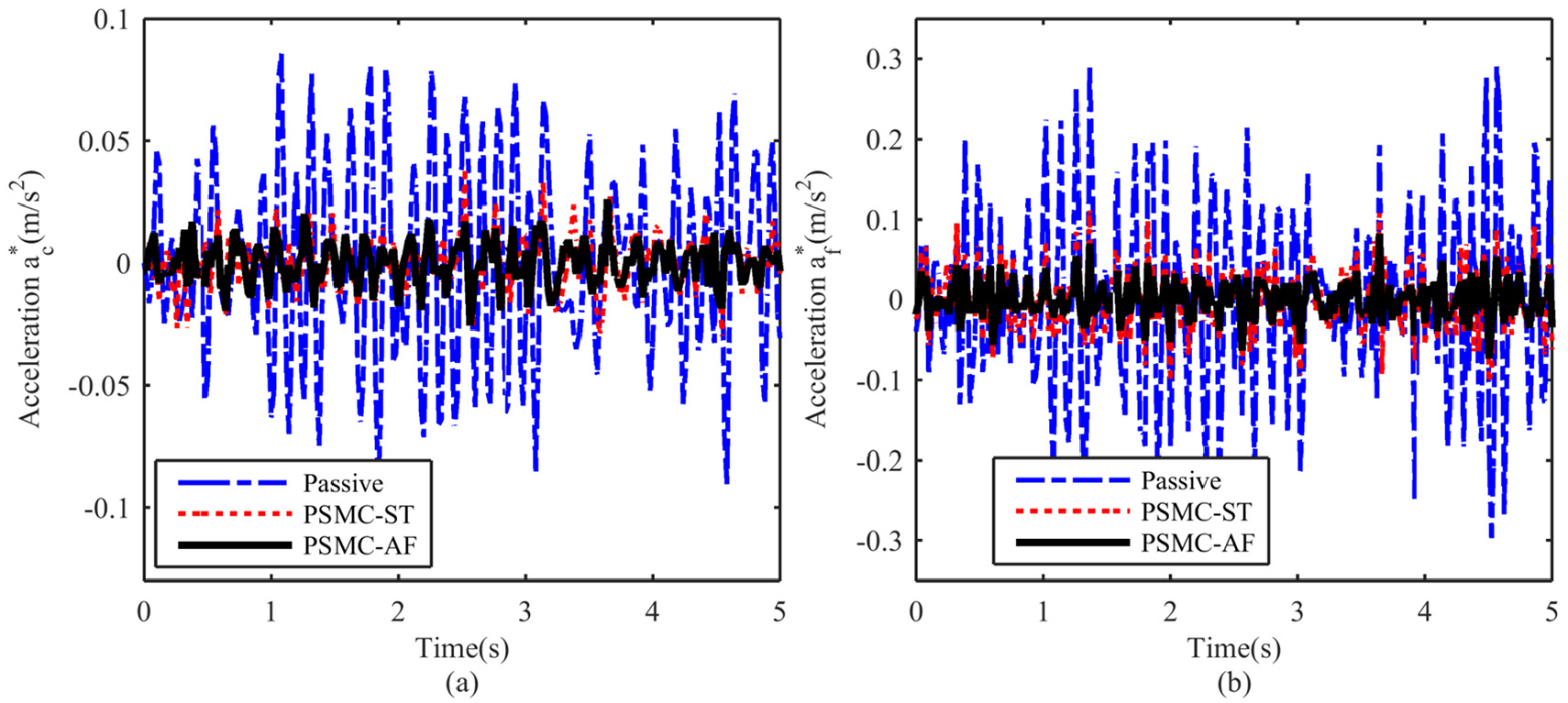
Time response of acceleration under random excitation. (a) Comparison of car floor vibration acceleration. (b) Comparison of car frame floor vibration acceleration.
Comparison of displacement response under random excitation.
Comparison of acceleration response under random excitation.
In order to verify the control effect of the proposed controller in the frequency domain, the frequency response curves of the horizontal vibration acceleration of the car system are shown in Figure 12. It can be seen that the resonance frequencies of the response curves are concentrated in the low frequency range of 0–10 Hz. Under the active control, the amplitude of low-frequency range of car system is significantly reduced, and the amplitude of car system under the control of PSMC-AF is smaller than PSMC-ST.
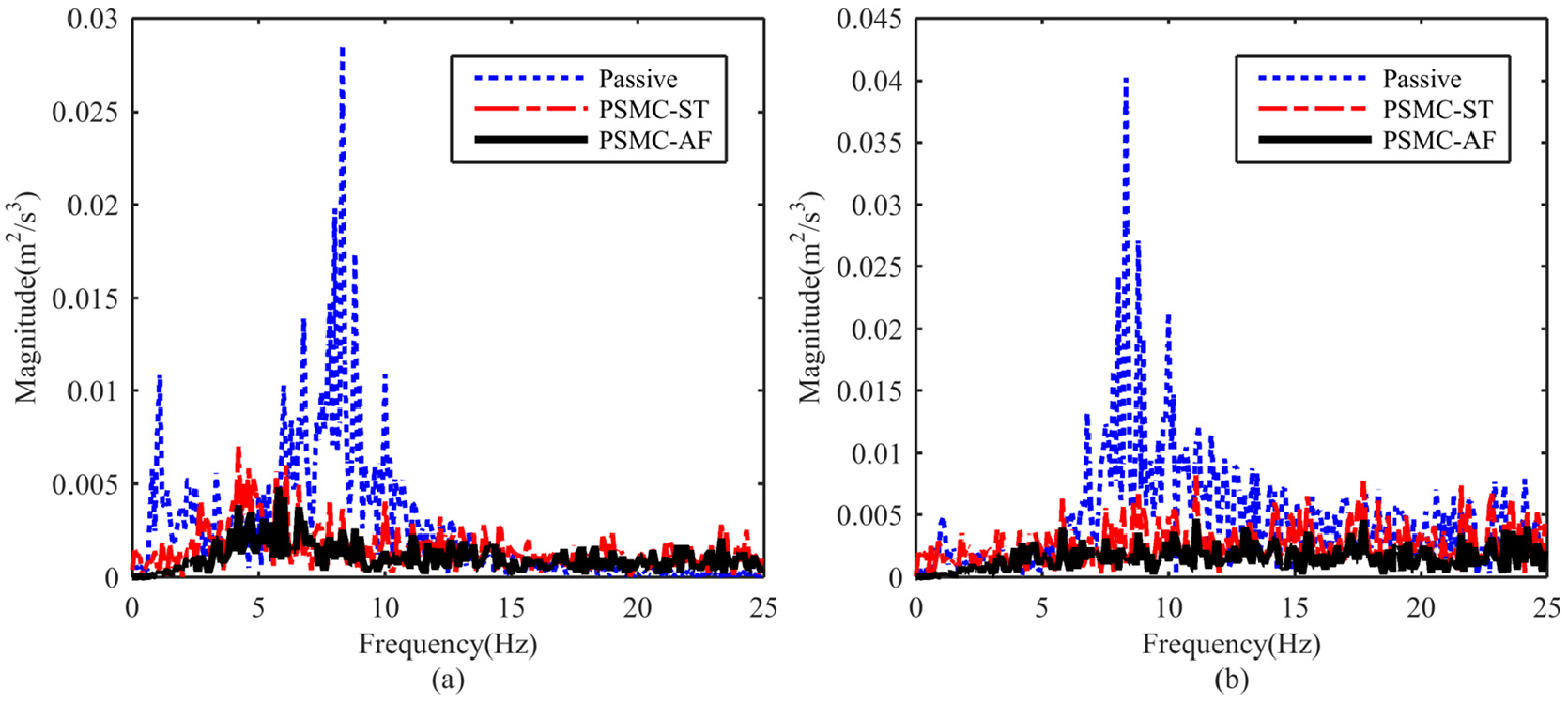
Frequency response of acceleration under random excitation. (a) Comparison of car floor vibration acceleration. (b) Comparison of car frame floor vibration acceleration.
Based on the above simulation experiments, it can be seen that PSMC-AF can effectively restrain the horizontal vibration of the car system with nonlinear guide shoe and systematic uncertainty under the excitation of different guide rail displacement. Compared with PSMC-ST, PSMC-AF has better control effect and requires less output force, which can save energy while ensuring good control effect, verifying the effectiveness, and robustness of PSMC-AF.
Conclusions
In this paper, considering the nonlinearity of guide shoe, parameter uncertainties and uncertain external disturbances of the elevator car system, a more practical active control model for horizontal vibration of the 4-DOF elevator car system was derived, the correctness and rationality of the established model are verified by real elevator experiment, which lays a foundation for the research on the horizontal vibration active control method of the car system.
Based on the above active control model, a PSMC-AF was designed to reduce the horizontal vibration of the car system. In order to reduce the influence of compound uncertainty on the car system, a FLS was established to approximate the CUIT on-line, the continuous smooth HTF was introduced into the sliding mode switching term to compensate the fuzzy approximation error. Finally, the stability of the closed-loop system was proved by Lyapunov stability theory.
By MATLAB to simulate the horizontal vibration of 7 m/s elevator car system, the results show that PSMC-AF can attenuate more than 53% of the RMS and MAX of the horizontal vibration displacement of car system, and reduce more than 62% of the RMS and MAX of the horizontal vibration acceleration of car system under the different rail excitation conditions. Furthermore, the control effect of the PSMC-AF is much better than the PSMC-ST and passive control. This proves the superiority of the proposed controller, which has good robustness to the nonlinearity of guide shoe and the uncertainty of the car system, and can ensure the run stability and ride comfort of the ultra-high-speed elevator.
The control strategy proposed in this paper has strong robustness to the nonlinearity and uncertainty of the system, but the sliding surface require a process to converge to zero asymptotically. Shortening the time to reach the sliding surface and eliminating the chattering effect on the closed-loop system more effectively, meanwhile ensuring the control accuracy have become a problem to be further studied in the future.
Footnotes
Acknowledgements
The authors are grateful for the equipment support provided by Shandong Fiji Zhiyu Elevator Co., Ltd. The authors sincerely thank the editors and reviewers for their insights and comments to further improve the quality of the manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the Shandong Province Natural Science Foundation, China (Grant No. ZR2017MEE049) and the Key Research Development Project of Shandong Province (Grant No. 2018GSF122004).