This paper considers the non-fragile distributed state estimation problem for Markov jump systems over sensor networks based on dissipative theory. Moreover, both state estimator gain variations and parameter uncertainties are assumed to be with mode-dependent for more practical modeling. On the basis of stochastic analysis and Lyapunov–Krasovskii function method, sufficient conditions with desired mode-dependent estimators are established such that the prescribed dissipative performance can be achieved. In the end, the effectiveness and applicability of the developed scheme is confirmed via the illustrative example.
Markov jump system (MJS), as a special type of hybrid systems, has attracted increasing attention over the last few years, since it can model realistic application systems in a better way with certain abrupt phenomena in system parameters, structures or environmental disturbances. Some well-known topics of MJSs can be listed as biological systems,1 power systems,2 mechanical systems,3 and so on. Among various research issues of MJSs, the state estimation problem has been widely investigated due to the difficulties in acquiring real states in most applications. As such, many effective state estimation approaches for linear and nonlinear MJSs have been found in the literature.4–7 On the other hand, it should be noted that the uncertainty has to be taken into account when it refers to the state estimation problem, which may lead to system performance degradation or incorrect results. Subsequently, many researchers have carried out various studies on state estimation of MJSs with uncertainties and fruitful schemes have been proposed accordingly.8–11
Recently, significant advances have been made toward the non-fragile strategies for control systems. Compared with traditional schemes, the non-fragile strategies can deal with the controller or filter parameter perturbations.11–16 On this foundation, the robustness and applicability can be improved. As a result, several non-fragile based analysis and synthesis findings for MJSs have been reported.17–19 In addition, another distinguishing improvement is rapid development of sensor networks (SNs), which means that a group of sensors are working together with local information exchanging for desired measurement. Furthermore, SNs could enhance robustness and reliability by collective behaviors.20–23 In particular, the distributed technology has been developed for SNs, which gives rise to the research on distributed state estimation problems.24,25 However, so far, it is worth mentioning that there are still open issues and challenges for the non-fragile distributed state estimation problem for MJSs, which is the main motivation of this research.
Based on these discussions, in this paper, the non-fragile distributed state estimation problem of MJSs via SNs with state estimator gain perturbations and uncertainties is investigated. Compared with most reported works, the main contributions are stated in two aspects: (1) The MJSs model with state estimator gain perturbations and uncertainties is introduced under the dissipative theory framework for the first time. More specifically, SNs are with the mode-dependent features for less conservatism and the external disturbances are handled with the help of dissipative performance. (2) Based on model transformation, mode-dependent Lyapunov–Krasovskii functions are established and sufficient criteria can be deduced to guarantee dissipative performance for estimation errors in the mean-square sense. Furthermore, the mode-dependent estimator gains can be calculated via convex optimization and matrix technique.
The structure of our paper is arranged herein. In Section 2, the MJS model and SNs are introduced and the corresponding state estimation problem is formulated. In Section 3, theoretical theorems and proofs are presented with details. Section 4 employs a numerical example to demonstrate the effectiveness of the proposed methodology. In Section 5, the conclusion is drawn with future research prospect.
The following notations are adopted in this paper.
and stand for dimensional Euclidean space and set of real matrices, respectively. Matrix means that is positive definite and vice versa, ⊗ represents Kronecker product, denotes a block-diagonal matrix, ★ is an ellipsis for a symmetric item.
Preliminaries and problem formulation
For a fixed probability space, represents a right-continuous Markov process, which takes values as with transition rates
denotes the transition rate from mode at time to mode at time with , .
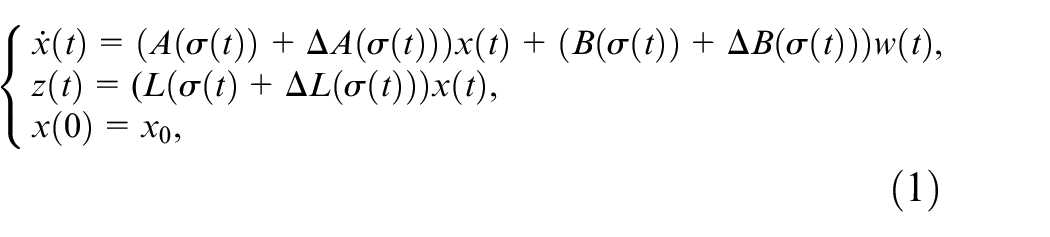
Consider the following MJSs:
where is the system state, is the disturbance with limited energy, is the output of the measurement. , , are known constant matrices and , , are parameter uncertainties with
and are known constant matrices and satisfies
For the distributed deployment of SNs, it is assumed that a group of sensor nodes is used. Their communication topology is represented by a directed graph , where and stand for the sets of nodes and edges, respectively. The neighboring set of sensor is . The adjacency matrix is defined as with . When , the sensor can receive information from and otherwise.
Subsequently, the measurement output of sensor is described as follows:
where and are known constant matrices and is the sampled data of with time-varying sampling period .
By denoting as index, the distributed state estimators are designed by:
where is the mode-dependent state estimator gains to be determined.
Moreover, by taking into account of the gain fluctuations, it follows that
where
As a result, by denoting
the unified state estimation error system can be obtained as follows:
Remark 1: It should be noted that the designed filter gains based on nominal models are always difficult or very expensive to be exactly implemented in practical applications. Under this context, the non-fragile filter design with gain fluctuation is taken into account, which can lead to less conservatism.
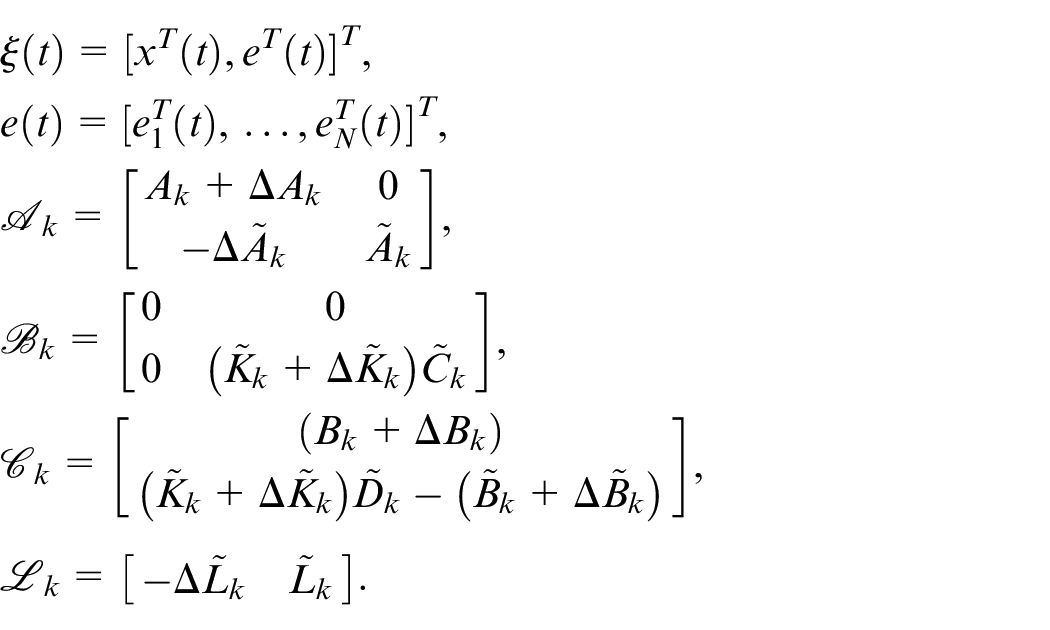
The compact form of augmented state estimation error can be further rewritten as
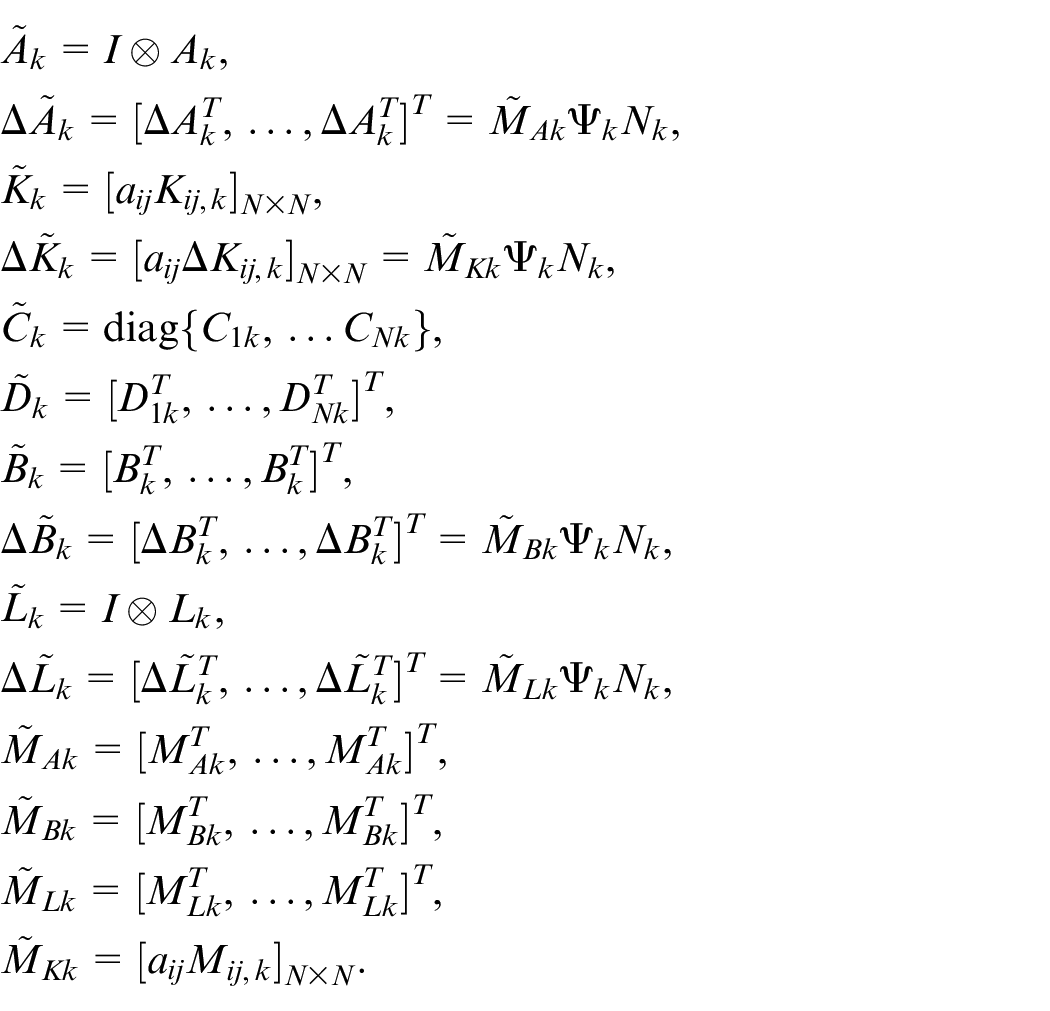
where
and
To this end, the dissipative performance is introduced and a useful lemma is given.
Definition 1.26 Given real symmetric matrices , and matrix with appropriate dimensions, system (1) is said to be -dissipative in the mean-square sense if with zero initial state it holds that
Without loss of generality, it is supposed that with and is a real matrix.
Lemma 1.27 For given appropriate matrices , , , for all it holds that
if and only if there exists a scalar such that
Main results
In this section, the procedure of distributed state estimation is designed to ensure that the augmented state estimation error system can achieve the prescribed -dissipative performance.
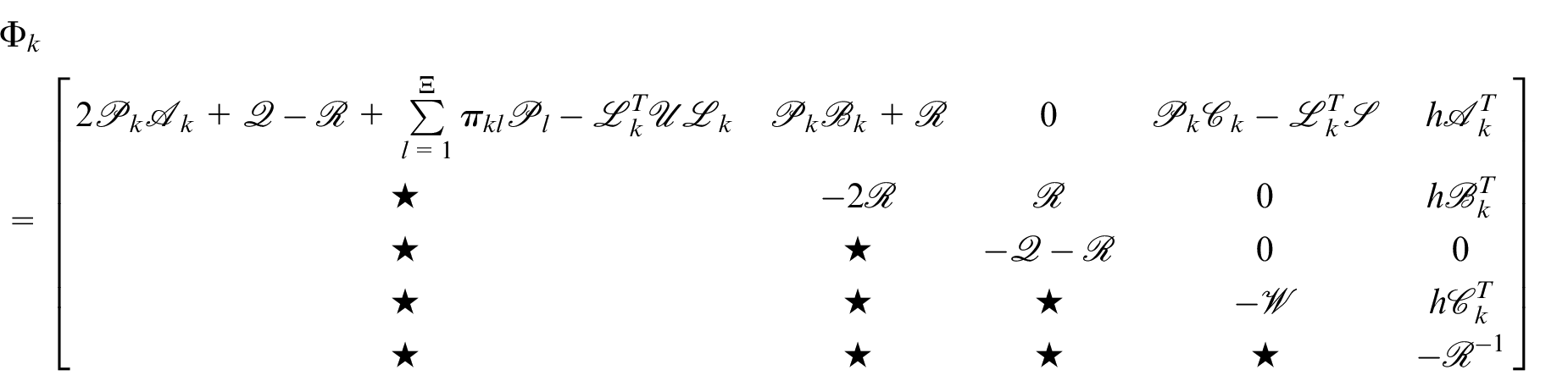
Theorem 1. The non-fragile distributed state estimation problem for MJS (1) can be solved with the given mode-dependent state estimator gains , if there exist mode-dependent matrix , and matrices , , such that holds, where
Proof. By employing the input-delay method, it can be obtained that
where and .
Construct the following mode-dependent Lyapunov–Krasovskii function for each mode :
where
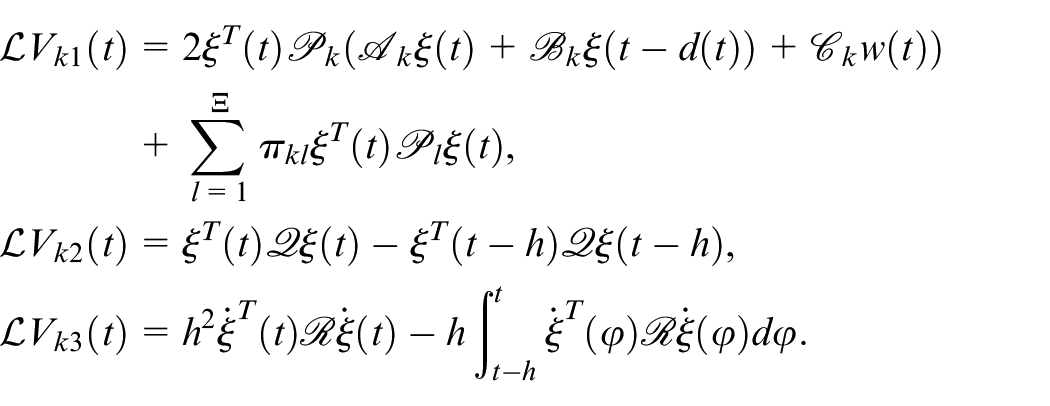
Denote the weak infinitesimal operator of as
Subsequently, it can be deduced that
In addition, one can obtain that
Then, it yields that
where
Thus, it can be derived by Schur complement that can ensure that . As a result, by integrating both sides of the above inequality from 0 to with zero initial condition and taking the expectation, we can find a such that
This means that with zero initial condition, the -dissipative performance in the mean-square sense can be satisfied according to Definition 1. This completes the proof.
Remark 1. It is worth mentioning that the linear matrix inequalities conditions in Theorem 1 are not in standard form. Therefore, Theorem 2 will be presented to calculate the desired state estimation gains in terms of matrix transformations.
Remark 2. From the proof of Theorem 1, it can be found that the -dissipative performance can ensure the mean-square stability while achieving the disturbance attenuation. Moreover, the -dissipative performance can include common and passivity, which are widely used for dealing with the disturbances.
Theorem 2. The non-fragile distributed state estimation problem for MJS (1) can be solved, if there exist mode-dependent matrix , , and matrices , , , such that holds, where
and the mode-dependent state estimator gains can be obtained by .
Proof. Decompose as , where
Then, by performing matrix congruent transformation and letting , the rest of proof follows directly by Lemma 1 from Theorem 1.
Remark 4. It is noticed that the diagonal structures of LMI variables would bring certain conservatism when solving the convex optimization problem of LMIs. However, the computational complexity of LMIs can be largely reduced with the diagonal structure, especially for MJSs with different modes.
Illustrative examples
In this section, simulation results are presented to verify the proposed state estimation strategy.
Consider the MJS (1) with following parameters:
and
where the transition rate matrix is supposed to be
The parameter uncertainties are supposed to be
and
The sampling period of the SNs is set by . The SNs are deployed by the following adjacency:
and the parameters are given by
and
The state estimator gain fluctuations are supposed to be
and .
For the -dissipative performance, it is set that
and the external disturbance is assumed to be .
Based on these parameters in the simulation, the following mode-dependent estimator gains are obtained by Theorem 2:
and
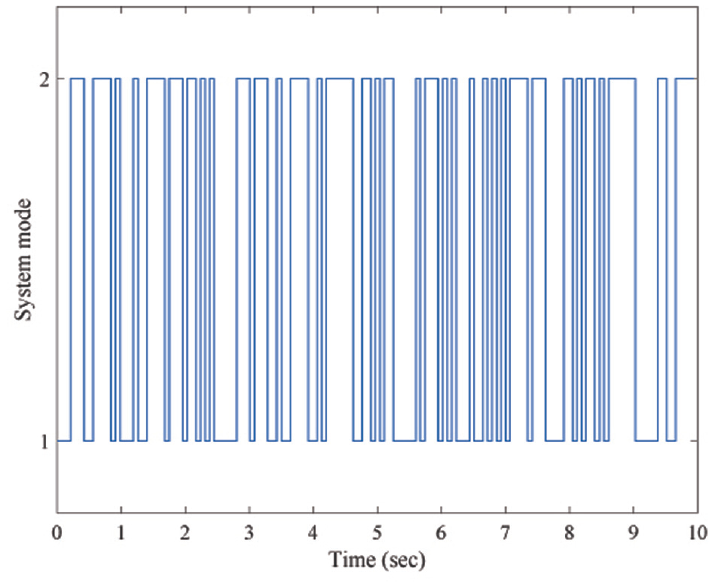
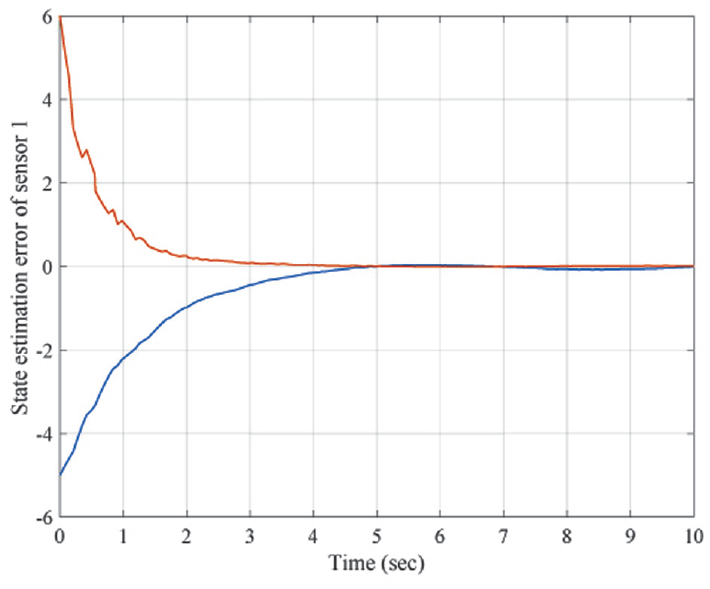
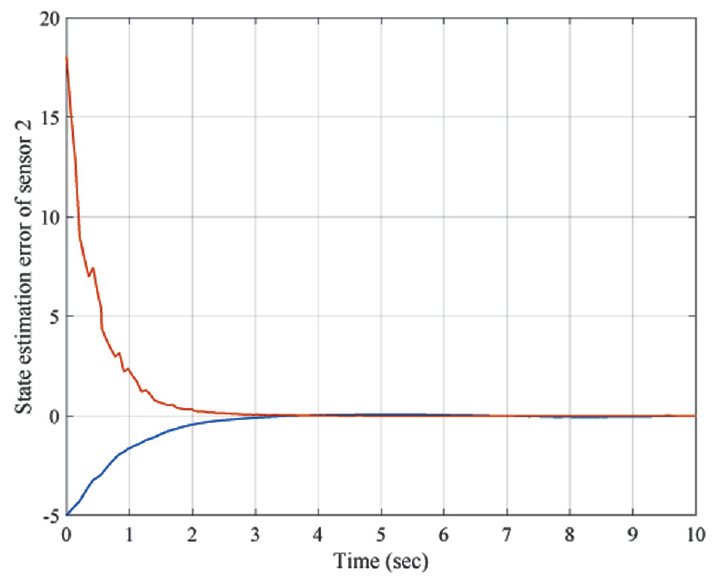
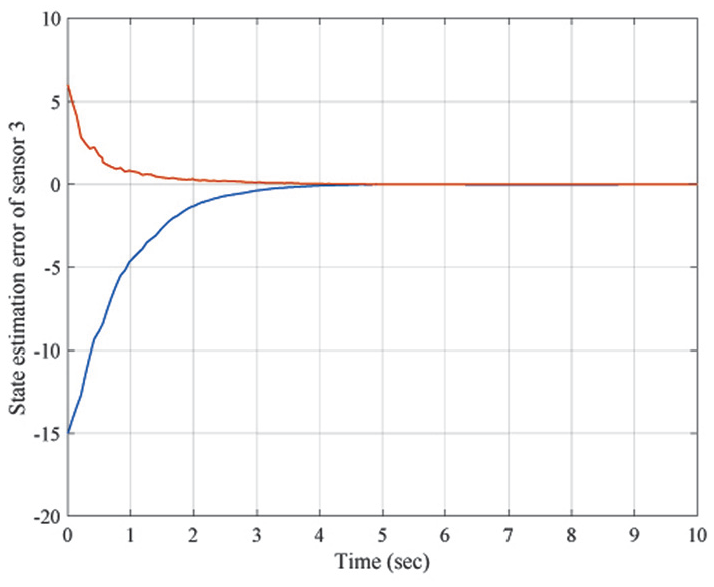
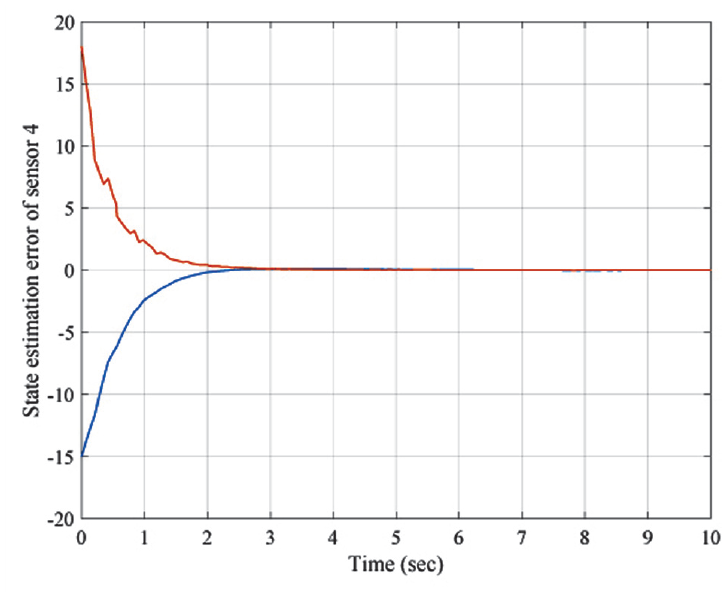
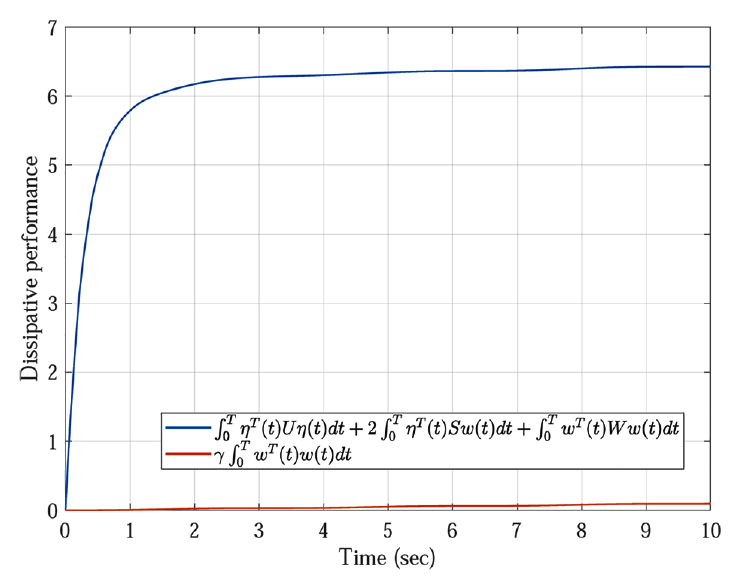
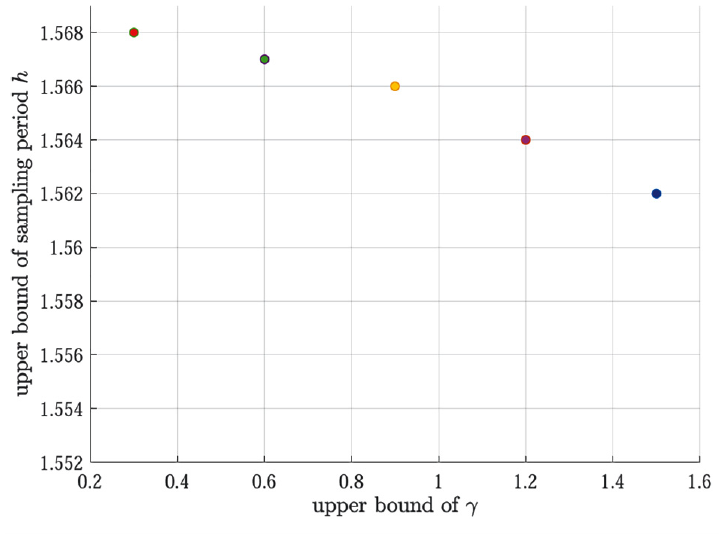
The state estimation errors with system modes are depicted in Figures 1 to 5, respectively. Accordingly, the -dissipative performance is shown in Figure 6, where = 1 can be chosen. From these figures, it can be seen that all the filtering errors can converge to zeros with disturbances, such that MJS can be effectively estimated by the designed mode-dependent distributed SNs, which can support the validity of theoretical findings. Moreover, the relation between upper bounds of sampling periods and performance parameter is given in Figure 7, from which one can find that smaller sampling periods are needed when performance parameter is large.
The system mode jumpings.
The state estimation error of sensor 1.
The state estimation error of sensor 2.
The state estimation error of sensor 3.
The state estimation error of sensor 4.
The -dissipative performance.
The relation between upper bounds of sampling periods and performance parameter γ.
Conclusion
In this paper, the distributed state estimation of Markov jump systems with uncertainties is concerned under dissipative theory based on the SNs with mode-dependent features. More precisely, the non-fragile strategy is utilized for more measurement robustness. The distributed state estimators are developed and the corresponding criterion is derived to ensure the dissipative performance of estimation errors. Finally, the numerical example is provided to demonstrate the validity of the theoretical findings. One interesting direction of future research could be extending our current investigations to the case of asynchronous detection of transition probability, which is more complex but more practical.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Our work is supported by the Research Project of National Key Laboratory of Human Factors Engineering (SYFD061901).
ORCID iDs
ChangHua Jiang
Yan Zhao
References
1.
ShenHZhuYZhangL, et al. Extended dissipative state estimation for Markov jump neural networks with unreliable links. IEEE Trans Neural Netw Learn Syst2016; 28(2): 346–358.
2.
UgrinovskiiVPotaHR.Decentralized control of power systems via robust control of uncertain Markov jump parameter systems. Int J Control2005; 78(9): 662–677.
3.
WangJChenMShenH.Event-triggered dissipative filtering for networked semi-Markov jump systems and its applications in a mass-spring system model. Nonlinear Dyn2017; 87(4): 2741–2753.
4.
DoucetAGordonNJKrishnamurthyV.Particle filters for state estimation of jump Markov linear systems. IEEE Trans Signal Process2001; 49(3): 613–624.
5.
LiFWuLShiP, et al. State estimation and sliding mode control for semi-Markovian jump systems with mismatched uncertainties. Automatica2015; 51: 385–393.
6.
CostaOLVGuerraS. Stationary filter for linear minimum mean square error estimator of discrete-time Markovian jump systems. IEEE Trans Automat Contr2002; 47(8): 1351–1356.
7.
ChengJAhnCKKarimiHR, et al. An event-based asynchronous approach to Markov jump systems with hidden mode detections and missing measurements. IEEE Trans Syst Man Cybern Syst2018; 49(9): 1749–1758.
8.
ShiPBoukasEK.H∞ control for Markovian jumping linear systems with parametric uncertainty. J Optim Theor Appl1997; 95(1): 75–99.
9.
KarimiHR.A sliding mode approach to H∞ synchronization of master–slave time-delay systems with Markovian jumping parameters and nonlinear uncertainties. J Franklin Inst2012; 349(4): 1480–1496.
10.
OrsiR.Decentralized robust control of uncertain Markov jump parameter systems via output feedback. Automatica2007; 43(11): 1932–1944.
11.
ZhangLHuaMYaoF, et al. Non-fragile l2-l∞ filtering for nonhomogeneous Markov jump systems with randomly occurring uncertainties and gain variations. J Franklin Inst2017; 354(16): 7521–7542.
12.
TaiWTengQZhouY, et al. Chaos synchronization of stochas-tic reaction-diffusion time-delay neural networks via non-fragile output-feedback control. Appl Math Comput2019; 354: 115–127.
13.
ZhouJLiuYParkJH, et al. Fault-tolerant anti-synchronization control for chaotic switched neural networks with time delay and reaction diffusion. Discrete Cont Dyn Syst S. 2019: 1–20.
14.
LienCH.Non-fragile guaranteed cost control for uncertain neutral dynamic systems with time-varying delays in state and control input. Chaos Solitons Fractals2007; 31(4): 889–899.
15.
YangGHWangJL.Non-fragile H∞ control for linear systems with multiplicative controller gain variations. Automatica2001; 37(5): 727–737.
16.
SakthivelN.Non-fragile synchronization control for Markovian jumping complex dynamical networks with probabilistic time-varying coupling delay. Asian J Control2015; 17(5): 1678–1695.
17.
HouNDongHWangZ, et al. Non-fragile state estimation for discrete Markovian jumping neural networks. Neurocomputing2016; 179: 238–245.
18.
VembarasanVBalasubramaniamPChanCS.Non-fragile state observer de-sign for neural networks with Markovian jumping parameters and time-delays. Nonlinear Anal Hybrid Syst2014; 14: 61–73.
19.
MaC.Non-fragile mixed H∞ and passive synchronization of Markov jump neural networks with mixed time-varying delays and randomly occurring controller gain fluctuation. PLOS ONE2017; 12(4): e0175676.
20.
YuWChenGWangZ, et al. Distributed consensus filtering in sensor networks. IEEE Trans Syst Man Cybern Part B2009; 39(6): 1568–1577.
21.
MaCWuWLiYL.Distributed mode-dependent state estimation for semi-Markovian jumping neural networks via sampled data. Int J Syst Sci2019; 50(1): 216–230.
22.
KekatosVGiannakisGB.Distributed robust power system state estimation. IEEE Trans Power Syst2013; 28(2): 1617–1626.
23.
DongHWangZGaoH.Distributed H∞ filtering for a class of Markovian jump nonlinear time-delay systems over lossy sensor networks. IEEE Trans Ind Electron2013; 60(10): 4665–4672.
24.
YangFHanQLiuY.Distributed H∞ state estimation over a filtering network with time-varying and switching topology and partial information exchange. IEEE Trans Syst Man Cybern2019; 49(3): 870–882.
25.
YinXLiZZhangL, et al. Distributed state estimation of sensor-network systems subject to Markovian channel switching with application to a chemical process. IEEE Trans Syst Man Cybern2018; 48(6): 864–874.
26.
LuoBWuHLiH.Adaptive optimal control of highly dissipative nonlinear spatially distributed processes with neuro-dynamic programming. IEEE Transac Neural Netw2015; 26(4): 684–696.
27.
WangYXieLDe SouzaCE.Robust control of a class of uncertain nonlinear systems. Syst Control Lett1992; 19(2): 139–149.